DYNAMIKA
MANIPULATORÓW I
ROBOTÓW
PRZYKŁAD
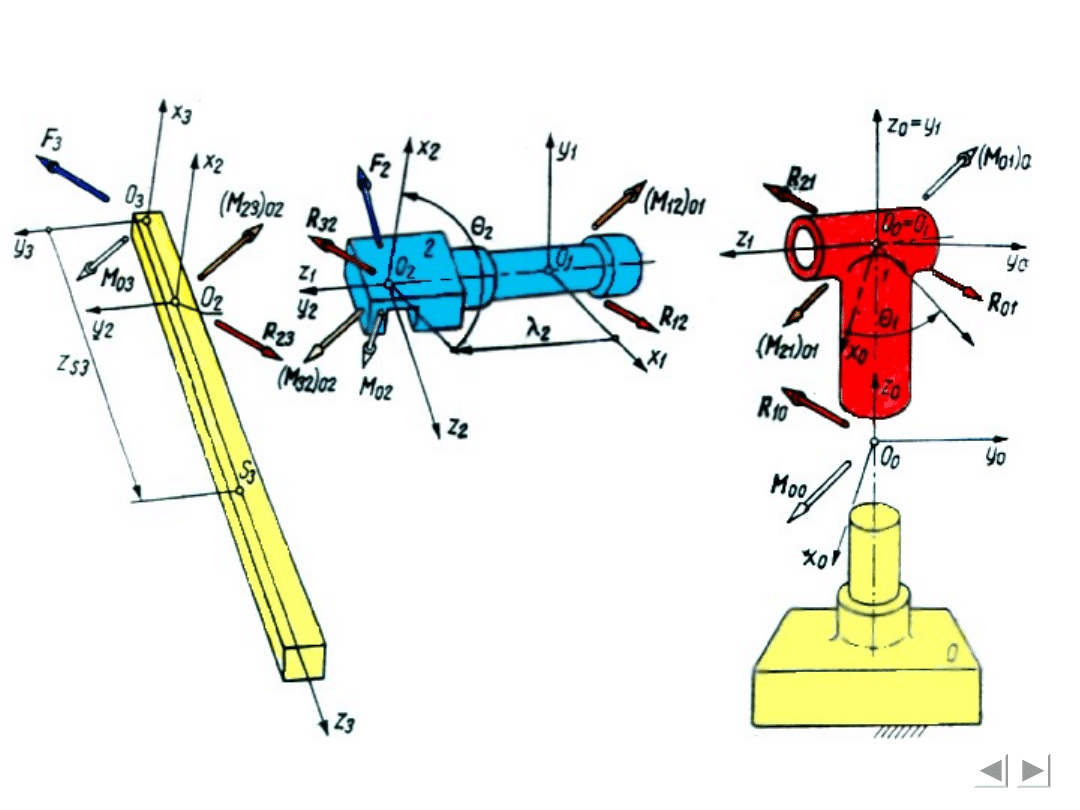

W przypadku manipulatora stanfordzkiego z
przykładu dotyczącego jego kinematyki dane są:
- położenia środków mas ogniw
T
S
S
y
r
1
0
0
1
1
T
S
S
y
r
1
0
0
2
2
T
S
S
z
r
1
0
0
3
3
przy czym znak „minus” przed y
S1
i y
S2
wynikają
z usytuowania środków mas S
1
i S
2
po
ujemnej stronie osi y
1
i y
2
Macierze tensorów bezwładności są zdefiniowane
przez wartości
2
2
2
0
0
0
0
0
0
J
iz
iy
ix
i
Oi
k
k
k
m
gdzie:
i
ij
ij
m
J
k
2
,
x,y,z
j
czyl
i
k
1x
, k
1y
, k
1z
k
2x
, k
2y
, k
2z
k
3x
, k
3y
, k
3z
ponieważ osie układów współrzędnych są głównymi
centralnymi osiami bezwładności (PYTANIE: CO TO
ZNACZY?)

Rozwiązanie problemu zaczyna się od wyznaczenia
współrzędnych wektorów prędkości zgodnie z wzorem
i
iO
i
i
ω
ω
1
T
i
Oi
iO
iO
i
Oi
r
v
T
T
1
czyli
- w przypadku
ogniwa 1
0
1
1
O
v
0
0
0
0
0
0
1
0
0
0
0
0
cos
sin
0
1
0
0
0
0
sin
cos
A
1
1
1
1
1
1
1
1
1
1
θ
θ
θ
θ
θ
θ
ω
ω
i

0
1
p
0
0
0
1
2
1
1
1
θ
k
m
H
y
O
0
1
F
0
0
0
1
2
1
1
1
θ
k
m
M
y
O

- w przypadku ogniwa 2
1
0
0
0
T
T
20
1
20
2
2
O
v
gdzie
:
1
0
0
0
0
cos
0
0
cos
sin
sin
cos
cos
sin
sin
sin
cos
sin
cos
cos
A
A
T
2
1
2
2
1
1
2
1
1
2
2
1
1
2
1
2
1
20
θ
θ
λ
θ
θ
θ
θ
θ
θ
λ
θ
θ
θ
θ
θ

1
0
0
0
0
cos
sin
sin
sin
cos
0
cos
sin
0
sin
cos
sin
cos
cos
T
2
2
1
2
1
2
1
1
2
2
1
2
1
1
20
θ
θ
θ
θ
θ
λ
θ
θ
θ
θ
θ
θ
θ
stąd
1
sin
0
cos
2
1
2
2
1
2
2
2
θ
θ
λ
θ
θ
λ
v
O
2
1
20
2
2
T ω
ω

gdzie:
0
cos
sin
0
0
0
1
0
0
0
0
0
1
0
0
cos
0
sin
0
sin
0
cos
0
0
0
A
1
1
2
1
2
2
1
1
1
1
1
1
1
1
1
2
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
ω
ω
ω

0
cos
sin
2
1
2
2
1
2
2
θ
θ
θ
θ
θ
ω
skąd
Współrzędne wektorów
2
p
i
2
O
H
względem układu
współrzędnych
x
2
, y
2
, z
2
wyznacza się z równań skalarowych pędów, czyli
2
1
2
2
2
2
cosθ
θ
y
λ
m
p
S
x
0
2
y
p
2
1
2
2
2
2
sinθ
θ
y
λ
m
p
S
z

oraz równań skalarowych krętów, jako
2
1
2
2
2
2
2
2
sinθ
θ
λ
y
k
m
H
S
x
x
O
Współrzędne wektorów i w układzie
współrzędnych
2
1
2
2
2
2
2
2
cosθ
θ
λ
y
k
m
H
S
z
z
O
2
F
2
O
M
x
2
, y
2
, z
2
wyznacza się z równań skalarowych sił, jako
2
1
2
2
2
2
cosθ
θ
y
λ
m
F
S
x
2
1
2
2
2
2
θ
y
λ
m
F
S
y
2
1
2
2
2
2
sinθ
θ
y
λ
m
F
S
z
2
2
2
2
2
y
y
O
k
m
H

oraz z równań skalarowych momentów sił
2
2
1
2
2
2
2
2
2
2
1
2
2
2
2
2
2
cos
sin
θ
θ
θ
k
k
k
θ
θ
λ
y
k
m
M
z
y
x
S
x
x
O
2
2
2
1
2
2
2
2
2
2
2
2
2
cos
sin
θ
θ
θ
k
k
θ
k
m
M
x
z
y
y
O
2
2
1
2
2
2
2
2
2
2
1
2
2
2
2
2
2
sin
cos
θ
θ
θ
k
k
k
θ
θ
λ
y
k
m
M
x
y
z
S
z
z
O

- w przypadku ogniwa 3 wyznaczono kolejno
wektory prędkości
1
0
0
0
T
T
30
1
30
3
3
O
v

gdzie:
0
cos
sin
sin
sin
sin
cos
cos
0
sin
cos
sin
sin
cos
cos
cos
sin
sin
1
0
0
0
T
2
3
2
1
3
1
1
2
2
1
3
1
1
2
2
2
3
2
1
2
2
1
1
3
2
1
2
2
1
1
3
30
03
θ
λ
θ
θ
λ
θ
θ
λ
θ
θ
λ
θ
θ
λ
θ
θ
λ
θ
θ
θ
θ
θ
θ
λ
θ
θ
θ
θ
θ
θ
λ
v

1
0
0
0
cos
sin
sin
sin
cos
0
cos
sin
0
sin
cos
sin
cos
cos
T
3
2
2
1
2
1
2
1
1
2
2
1
2
1
1
30
λ
θ
θ
θ
θ
θ
λ
θ
θ
θ
θ
θ
θ
θ
stąd
0
sin
sin
cos
2
1
2
3
2
1
3
2
1
2
2
3
3
3
θ
θ
λ
λ
θ
θ
λ
θ
θ
λ
θ
λ
v
O
2
2
3
3
ω
ω

ponieważ ogniwa 2 i 3 są połączone parą
przesuwną, która nie daje względnej prędkości
kątowej
Współrzędne wektorów
3
p
i
3
O
H
względem układu
współrzędnych
x
3
, y
3
, z
3
wyznacza się z równań skalarowych pędów, czyli
2
1
2
2
3
3
3
3
cosθ
θ
λ
θ
y
λ
m
p
S
x
2
1
3
3
3
3
sinθ
θ
z
λ
m
p
S
y
2
1
2
3
3
3
sin
m
p
z

oraz z równań skalarowych krętów, jako
2
1
3
3
2
3
3
3
sinθ
θ
λ
z
k
m
H
S
x
x
O
2
1
2
3
2
3
3
2
3
3
3
cosθ
θ
λ
z
θ
λ
z
k
m
H
S
S
y
y
O
2
1
2
3
3
3
cosθ
θ
k
m
H
z
x
O
Współrzędne wektorów
3
F
i
3
O
M
współrzędnych
w układzie
x
3
, y
3
, z
3
wyznacza się z równań skalarowych sił, jako

2
3
2
1
2
2
2
2
1
2
3
3
3
3
2
cos
cos
sin
θ
λ
θ
θ
λ
θ
θ
θ
θ
z
λ
m
F
S
x
2
1
3
2
1
2
2
2
1
2
3
3
3
3
sin
2
cos
2
θ
θ
λ
θ
λ
θ
θ
θ
θ
z
λ
m
F
S
y
3
2
1
2
2
2
1
2
2
3
3
3
3
sin
sin
λ
θ
θ
λ
θ
θ
θ
z
λ
m
F
S
x

oraz z równań skalarowych momentów sił, jako
2
1
3
3
2
1
2
3
3
2
2
1
2
3
2
3
2
3
2
1
3
3
2
3
3
3
sin
2
cos
sin
θ
θ
λ
z
θ
λ
z
λ
θ
θ
θ
k
k
k
θ
θ
λ
z
k
m
M
S
S
z
y
x
S
x
x
O

2
2
1
2
3
2
3
2
3
2
1
2
3
3
3
sin
cos
z
y
x
y
z
O
k
k
k
k
m
M
2
1
3
2
2
2
1
3
2
2
3
3
3
2
2
2
1
3
3
2
3
2
3
3
3
2
3
3
3
cos
sin
2
2
cos
sin
S
S
S
z
x
S
y
y
O
z
z
z
k
k
z
k
m
M

Równanie równowagi dynamicznej ogniwa 3
zapisane zgodnie z postulatem d’Alemberta w
układzie współrzędnych
x
3
, y
3
, z
3
0
A
3
23
1
3
F
R
0
A
A
A
23
1
3
3
3
1
3
3
2
23
1
3
R
r
M
M
O
O
O
gdzie:
T
O
λ
λ
r
1
0
0
1
0
0
A
3
3
3
3
1
3

stąd
R
23x2
=
-F
3x
R
23y2
= -F
3y
R
23z2
= -F
3z
y
x
x
F
λ
M
M
3
3
03
2
23
x
y
y
F
λ
M
M
3
3
03
2
23
z
z
M
M
03
2
23

Równania równowagi dynamicznej ogniwa 2
zapisane zgodnie z postulatem d’Alamberta w
układzie współrzędnych
x
2
, y
2
, z
2
0
A
32
2
12
1
2
R
F
R
0
A
A
A
12
1
2
2
2
1
2
2
32
2
1
12
1
2
R
r
M
M
M
O
O
O
O
gdzie:
3
23
32
F
R
R

T
O
λ
λ
r
1
0
0
1
0
0
A
2
2
2
2
1
2
stąd
2
3
2
2
3
2
1
12
cos
sin
θ
F
F
θ
F
F
R
z
z
x
x
y
2
3
2
2
3
2
1
12
sin
cos
θ
F
F
θ
F
F
R
z
z
x
x
x
x
x
x
F
F
R
3
2
1
12

3
2
2
02
23
02
2
01
12
1
0
0
A
F
F
λ
M
M
M
Z trzech składowych momentu oddziaływania
ogniwa 1 na ogniwo 2 najbardziej interesującą
jest składowa wzdłuż osi z
1
równa momentowi
napędowemu w parze obrotowej 0(obrotowej)-12.
2
3
2
2
03
02
2
3
2
2
3
3
03
02
1
12
sin
cos
x
x
z
z
z
z
y
x
x
x
F
F
M
M
F
F
F
M
M
M

2
3
2
2
03
02
2
3
2
2
3
3
03
02
1
12
cos
sin
θ
F
F
λ
M
M
θ
F
F
λ
F
λ
M
M
M
x
x
z
z
z
z
y
x
x
y
x
z
z
z
F
λ
M
M
M
3
3
03
02
1
12
Równania równowagi dynamicznej ogniwa 1
zapisane zgodnie z postulatem d’ Alemberta w
układzie współrzędnych
x
1
, y
1
, z
1
są następujące

0
A
21
1
01
1
1
R
F
R
0
A
A
A
01
1
1
1
1
1
1
1
21
1
01
1
1
R
r
M
M
M
O
O
O
O
gdzie:
12
21
R
R
0
1
F
0
A
1
01
1
1
r
stąd
12
1
01
A R
R
01
12
01
1
0
01
A
M
M
M

Zatem
1
1
12
1
1
12
0
01
sin
cos
θ
R
θ
R
R
z
x
x
1
1
12
1
1
12
0
01
cos
sin
θ
R
θ
R
R
z
x
y
1
12
0
01
y
z
R
R
1
1
12
1
1
12
0
01
sin
cos
θ
M
θ
M
M
z
x
x
1
1
12
1
1
12
0
01
cos
sin
θ
M
θ
M
M
z
x
y
1
12
1
01
0
01
y
y
z
M
M
M

Moment napędowy w parze obrotowej łączącej
ogniwo 1 z podstawą (ostoją) 0 można
wyznaczyć z wzorów powyżej na momenty z
uwzględnieniem równań momenty w
odniesieniu do ogniw 1 i 2, czyli
2
3
2
2
03
02
2
3
2
2
3
3
03
02
01
1
cos
sin
θ
F
F
λ
M
M
θ
F
F
λ
F
λ
M
M
M
M
x
x
z
z
z
z
y
x
x
y
zO
O

Podsumowanie
Siły
i
momenty
napędowe
w
parach
kinematycznych manipulatora są wywoływane
przez skokowe silniki elektryczne, sterowane
przez układ z czujnikami potencjometrycznymi
wskazującymi przemieszczenie i czujnikami
indukcyjnymi wskazującymi prędkość ruchu
złożonym członów tworzących pary. Znając
wartości sił i momentów napędowych w parach
kinematycznych określa się możliwości w zakresie
prędkości i przyspieszeń ruchu
chwytaka, gdy dane są parametry silników oraz
łączna masa chwytaka i obiektu.

Analityczna metoda badania dynamiki
mechanizmów przestrzennych daje możliwość
rozwiązania zadania w postaci jawnych zależności
funkcyjnych sił i momentów oddziaływania ogniw
w parach kinematycznych od parametrów
rozkładu mas członów i wielkości kinematycznych.
Zależności te można zaprogramować do obliczeń
na PC w celu różnych położeń manipulatora
robota, przy czym jako dane wprowadza się
przemieszczenia, prędkości i
przyspieszenia w parach kinematycznych oraz
rozkłady mas ogniw. W przypadku, gdy związana z
chwytakiem masa obiektu zmienia parametry
rozkładu jego masy, wtedy do obliczeń trzeba
wprowadzić odpowiednio zmienione dane.
Wyrażenia
na
siły
i
momenty
sił
bezwładności ogniw zawierają dwie grupy
składników. Pierwsza grupa z parametrami
k
ij
przedstawia efekt rozkładu mas członów
względem ich osi symetrii. Druga – efekt
przesunięcia środka masy względem początku
układu odniesienia.
Przykład liczbowy
Parametry rozkładu mas członów przyjęto
według
danych
liczbowych
w
przypadku
manipulatora stanfordzkiego, które zestawiono w
tablicy.
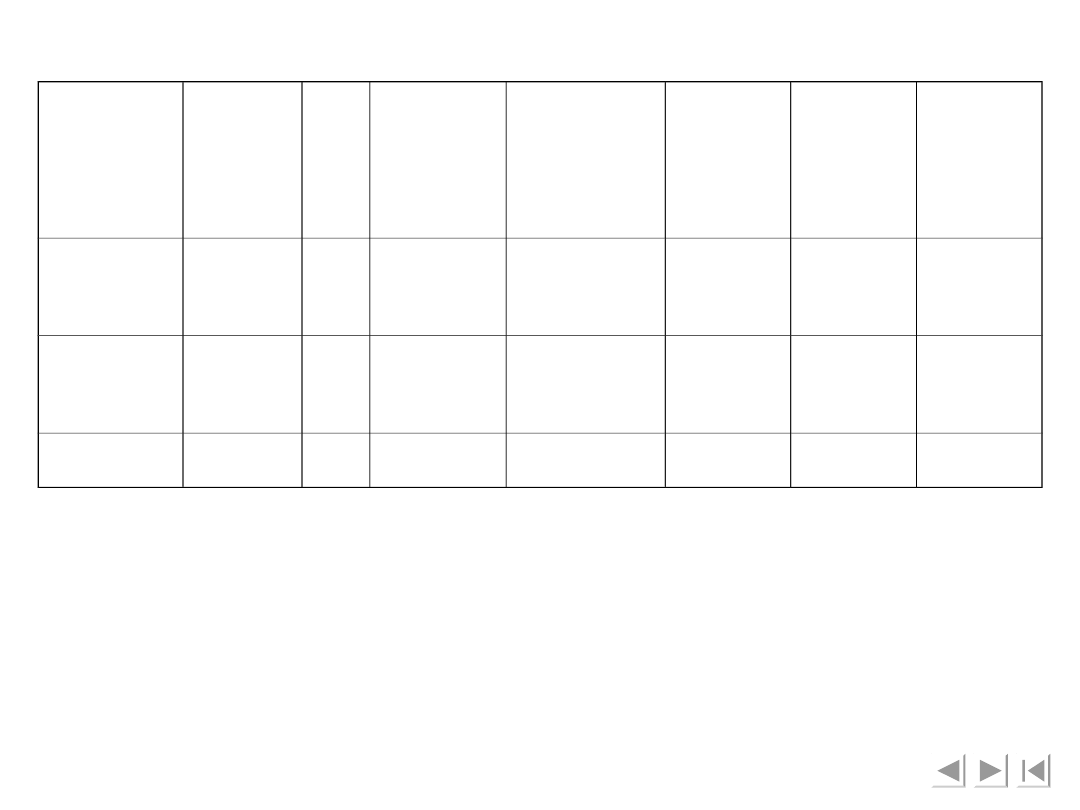
Nr
ogniw
a
Mas
a w
kg
x
Si
w
m
y
Si
w
m
z
Si
w m
m
i
k
2
i
x
w
kgm
2
m
i
k
2
i
y
w
kgm
2
m
i
k
2
i
z
w
kgm
2
1
9.29
0 0.017
5
0.1105 0.276 0.255 0.071
2
5.01
0 0.105
4
0
0.108 0.018 0.100
3
4.25
0
0
0.6447 2.510 2.510 0.006
Ponadto dana jest długość
λ
2
= 0.152 m
Analizę dynamiki manipulatora ograniczono do
jednego położenia, w którym dane są
:

0
1
θ
90
2
θ
m
.
λ
508
0
3
1
2
1
6
1
s
.
θ
θ
2
2
1
5
s
θ
θ
s
m
.
λ
1
0
3
2
3
0
1
s
m
.
λ
Rozwiązanie
problemu
badania
dynamiki
manipulatora robota stanfordzkiego rozpoczęto od
obliczenia składowych sił i momentów sił
działających na poszczególne
ogniwa. Podstawiając dane liczbowe do wyrażeń
na siły i momenty otrzymano następujące wyniki:

Nm
.
M
z
275
1
01
0
2
x
F
N
.
F
y
119
0
2
N
.
F
z
233
0
2
Nm
.
M
x
1385
0
02
Nm
.
M
y
5400
0
02
Nm
.
M
z
0256
0
02
N
.
F
x
855
28
3
N
.
F
y
789
24
3
N
.
F
z
020
1
3
Nm
.
M
x
6219
19
03
Nm
.
M
y
3970
19
03
Nm
.
M
z
0154
0
03

Wartości sił i momentów oddziaływania ogniw w
parach kinematycznych po podstawieniu danych
liczbowych są następujące
N
.
R
x
855
25
2
23
N
.
R
y
789
24
2
23
N
.
R
z
020
1
2
23
Nm
.
M
x
1247
32
2
23
Nm
.
M
y
2627
6
2
23
Nm
.
M
z
0154
0
2
23
N
.
R
x
787
0
1
12
N
.
R
y
855
25
1
12
N
.
R
z
908
24
1
12
Nm
.
M
x
971
3
1
12
Nm
.
M
y
2336
32
1
12
Nm
.
M
z
1753
13
1
12
Nm
.
M
z
5086
33
0
01
Uwagi końcowe
Podana wyżej metoda macierzowa dynamiki
manipulatora robota stanfordzkiego dotyczy tak
zwanego zagadnienia prostego, czyli wyznaczenia
sił i momentów sił w parach kinematycznych.
Rozwiązania zadania odwrotnego to znaczy
wyznaczanie
przemieszczeń
w
parach
kinematycznych odpowiadających żądanym siłom
i momentom jest bardziej skomplikowane i
sprowadza się do rozwiązania zadania na
położenia
odpowiedniego
mechanizmu
przestrzennego manipulatora robota (por. zadanie
na położenia)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
Wyszukiwarka
Podobne podstrony:
08 Kinematyka manipulatorów i robotów, przykładid 7261 ppt
6 Analiza dynamiczna manipulatorów robotów jako mechanizmów
04 Analiza kinematyczna manipulatorów robotów metodą macierz
Dynamika manipulatora
7 Dynamika manipulatora
Programowanie układów manipulacyjnych i robotów u
tchoń, robotyka1, Dynamika manipulatora
więcej podobnych podstron