29.05.21
FANUC Roboter
FANUC Roboter
LR Mate 100
LR Mate 100
i
i
B
B
Intelligenter Mehrzweck Mini-
Intelligenter Mehrzweck Mini-
Roboter
Roboter
29.05.21
2
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
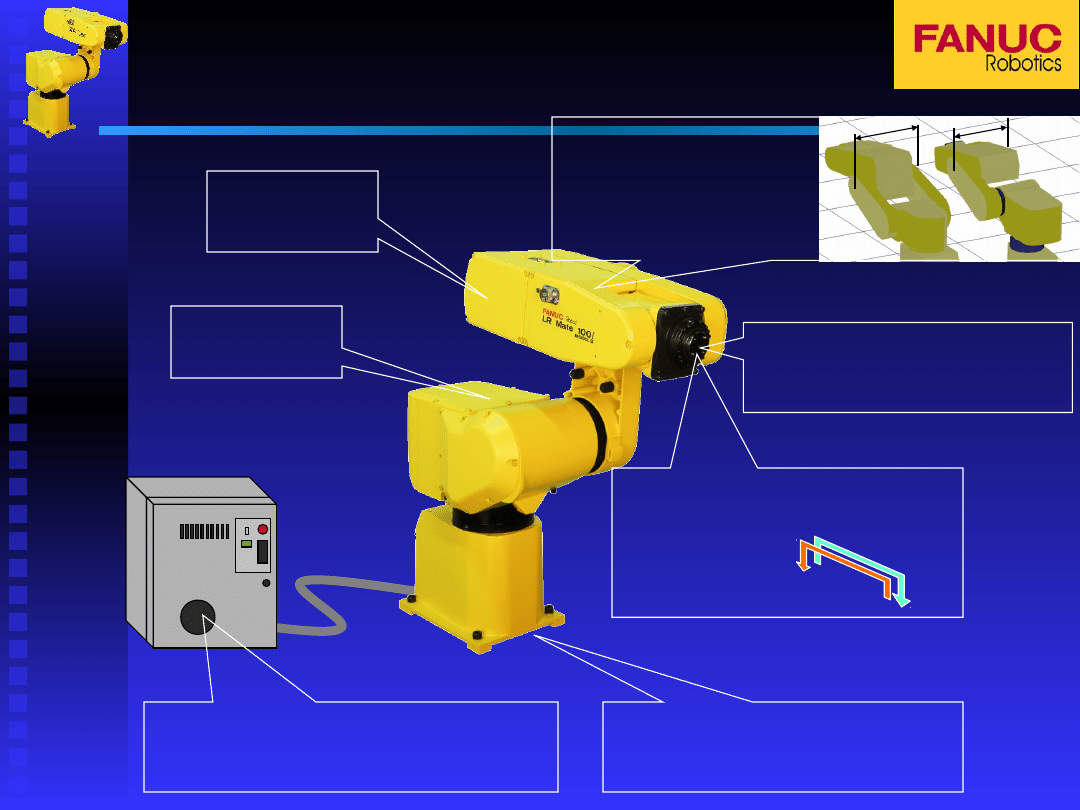
R-J3i Mate
Steuerung
Integrierte
Magnetventile
(Option)
Gekapselter Steuerschrank sorgt für
hohe Zuverlässigkeit gerade in
industrieller Umgebung (CE
Konformität)
Leistungsfähige 5 Kg Traglast
Lastmomente um 33% höher
Trägheitsmomente um 78% höher
Eigenschaften
Hochgeschwindigkeitsbewegungen
Weniger als 0,5 Sekunden für
Prüfzyklus
300 mm
25 mm
25 mm
Befestigungsmaß, Handflansch
und Arbeitsbereich sind
kompatibel zum Vorgänger LR
Mate 100i.
297
250
LR Mate 100i
LR Mate
100iB
Um 16% reduzierte Breite
ermöglicht größere
Applikationsflexibilität
speziell in enger Umgebung
Schutzart IP65
als Standard
29.05.21
3
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
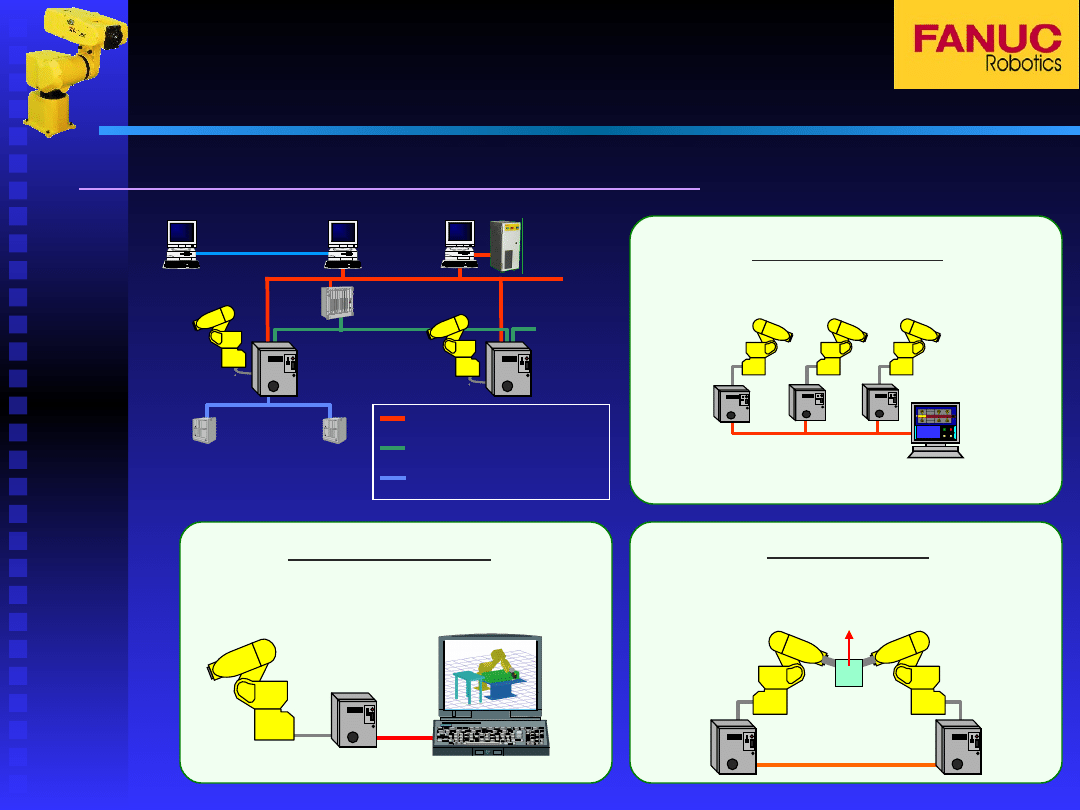
Intelligente Netzwerkfähigkeit
Variable Funktionalitäten
ROBOGUIDE
Einfach Offline Teachen
Robotlink
Synchronisierte Operationen
Ethernet
Synchronisation von
2 Robotern
CIMPLICITY
Zentrale Visualisierung via Netzwerk
Ethernet
Zentrale Steuerung
E/A
CIMPLICITY
SPS
Roboter
Roboter
Robotersimulation
ROBOGUIDE
CIMPLICITY
Telefon / Internet
E/A
Kommunikation im
Computernetzwerk
Kommunikation
mit seriellen E/A
Steuerungs-
Kommunikation
FANUC I/O Link, ME-Net,
DeviceNet, Profibus
FANUC I/O Link, Interbus,
DeviceNet, Profibus, etc.
Ethernet
29.05.21
4
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
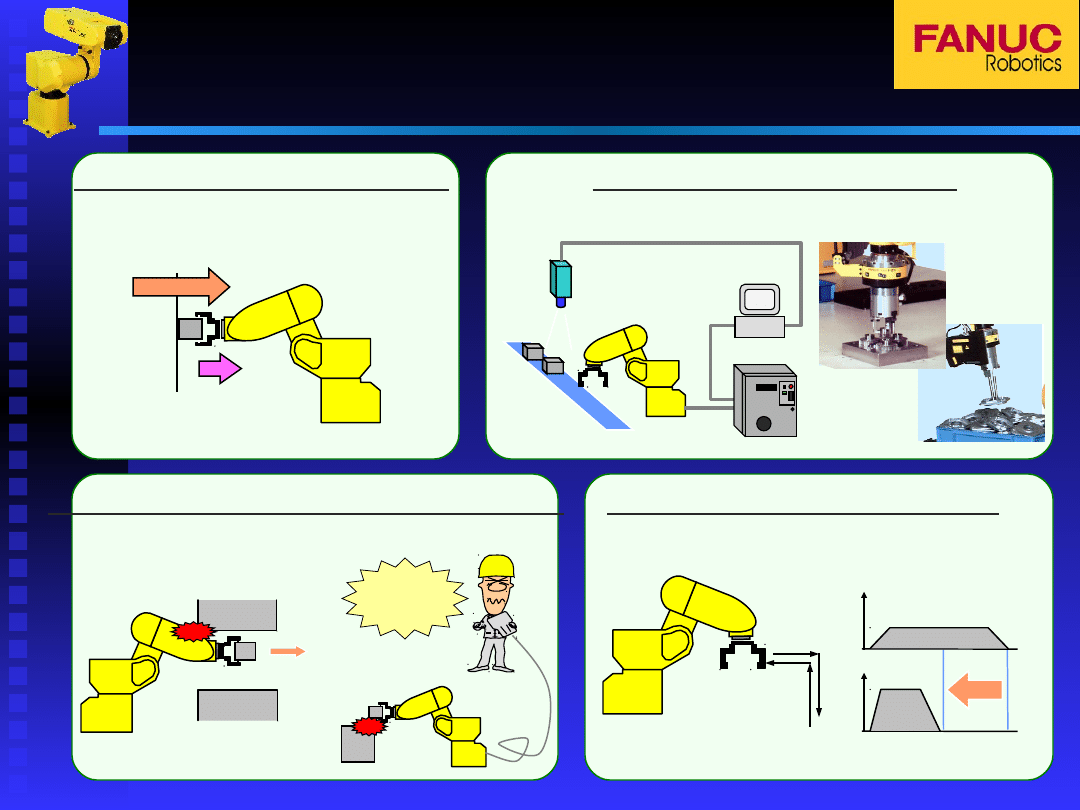
Variable Funktionalitäten
Kartesisches Softfloat
Passive Positionierung
Externe
Kraft
Kartesisches
Ausweichen der
Kraft
High Sensitive Collision Detection
Minimiert mögliche Kollisionsschäden
Extrem schnelle
Kollisionserkennung
Oops …
Falsche
Richtung
Erkennt
Kollisionen
während
Teachen
Reduziert Zykluszeit
v
v
t
t
Minimum Cycle Control
An Armstellung und Last angepasste
Beschleunigung
Intelligente Sensoren
2D- und 3D-Vision, sowie Kraft-Momenten-Sensor
29.05.21
5
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
Vereinfachte Wartung
Verwendung normaler Batterien (Größe D)
Verwendung normaler Batterien (Größe D)
Austausch nur alle 1,5 Jahre (vorher 7 Monate bei
Austausch nur alle 1,5 Jahre (vorher 7 Monate bei
Lithium)
Lithium)
Einfacher Austausch
Einfacher Austausch
Leichte Beschaffung
Leichte Beschaffung
Eliminierung des Riemenmechanismus
Eliminierung des Riemenmechanismus
Keine periodischen Einstellarbeiten an der mechanischen
Keine periodischen Einstellarbeiten an der mechanischen
Einheit erforderlich
Einheit erforderlich
Darstellung von Wartungsinformationen auf dem
Darstellung von Wartungsinformationen auf dem
Teach Pendant
Teach Pendant
Vorhersage zur Überholung
Vorhersage zur Überholung
Spanne bis zum Auftreten einer Motorüberhitzung
Spanne bis zum Auftreten einer Motorüberhitzung
Spielraum bis zu den maximal erlaubten Motormomenten
Spielraum bis zu den maximal erlaubten Motormomenten
Spanne bis zum Auftreten eines Überstromfehlers
Spanne bis zum Auftreten eines Überstromfehlers
Spielraum bis zum Kollisionsalarm
Spielraum bis zum Kollisionsalarm
Kollisionshistorie
Kollisionshistorie
29.05.21
6
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
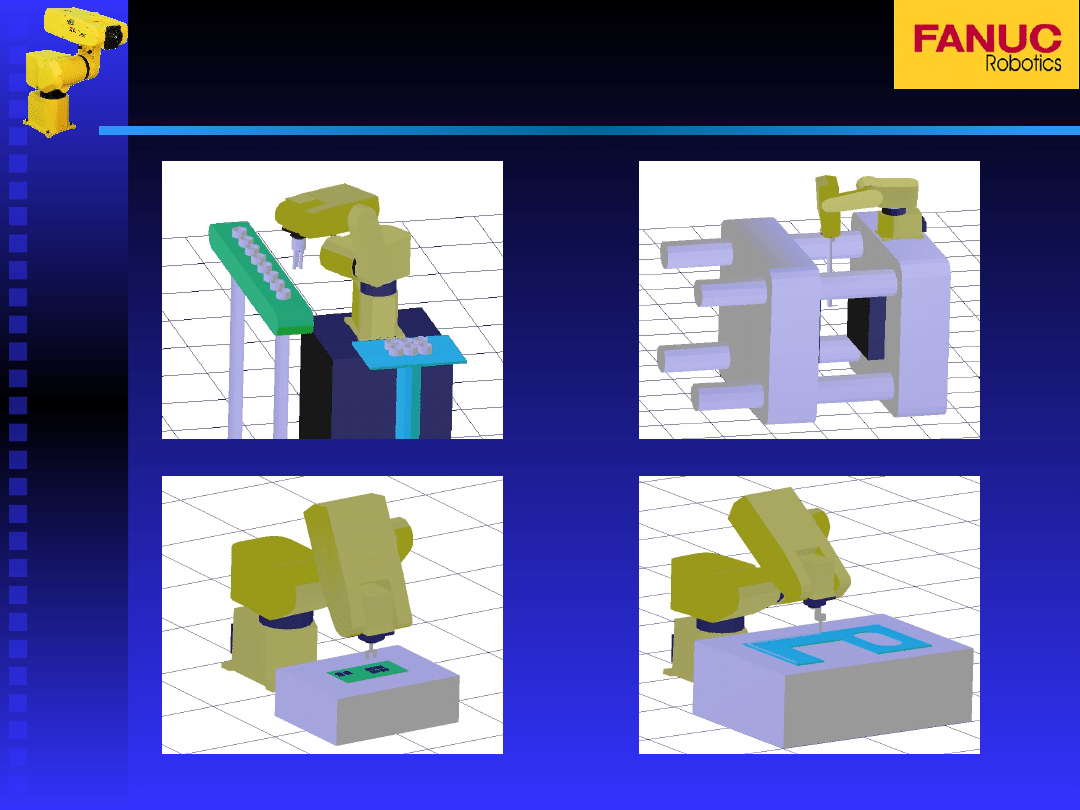
Trennmittelsprühen
Hochgeschwindigkeits-Teilehandhabung
Montage elektrischer Teile /
Leiterplattenbestückung
Nahtabdichten oder Kleberauftrag
Applikationsbeispiele
29.05.21
7
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
J1
J2
J3
J4
J5
Mechanische Einheit
LR Mate 100iB
Steuerung
Unterschiede zwischen R-J3i Mate und R-J2 Mate
2 x Minislot
: Ethernet, etc.
1 x voller Platz
:
Prozess E/A, etc.
1 x halber
Steckplatz :
Ethernet, E/A
Karten
- 3 Zusatzachsen (plus 5
Roboter-achsen) bei
Verwendung der 8 Achsen
Servokarte.
- Weitere Achsen durch zusätzl.
8 Achsen Servokarte (für
Minislot).
- Verstärker für Zusatzachsen
nur außerhalb des
Schaltschranks.
1 Achse
Als Option verfügbar
Nicht verfügbar
Standard
Mit Adapter
möglich
R-J3i Mate
R-J2 Mate
Steckplätze
Zusatzachsen
Linetracking
PCMCIA
Steckplatz
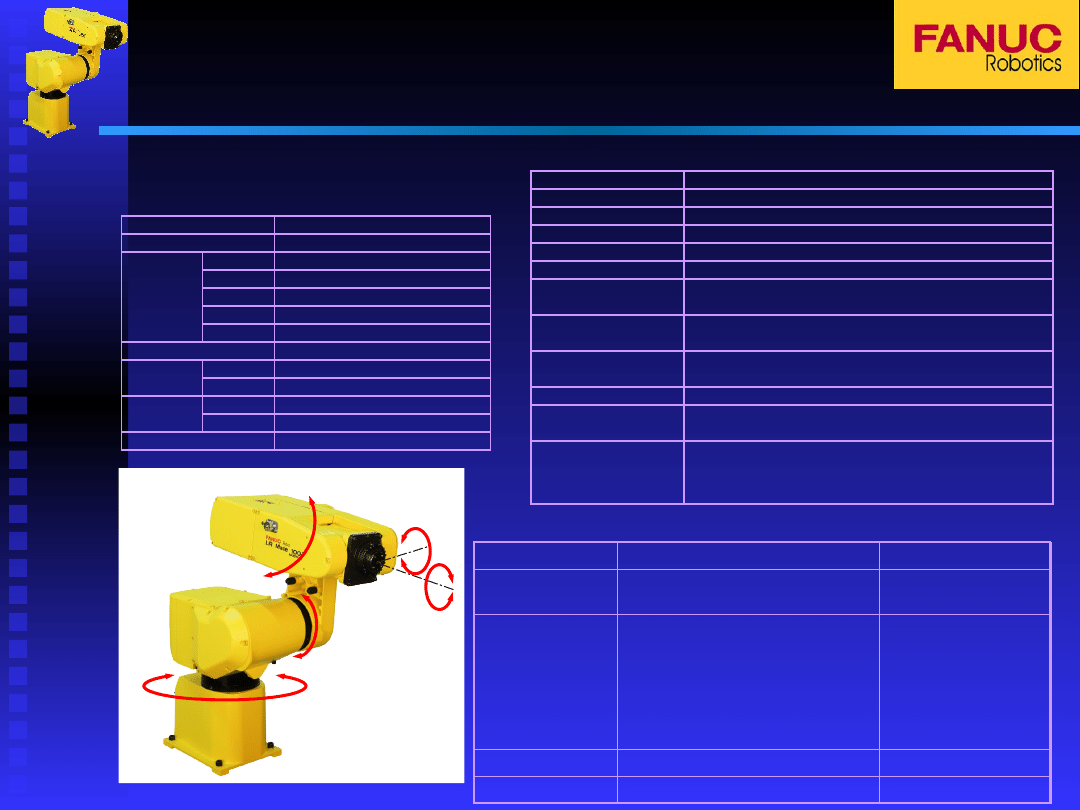
Spezifikation
Abmessungen
Gesteuerte Achsen
Gewicht
530 (B) x 470(H) x 320 (T) mm
5 Achsen
35 Kg
Digitale E/A
Externe Not-Aus
Signale
Hand-
Steuersignale
20 Eingänge / 20 Ausgänge
Externes Not-Aus Signal Eingang
Externes Not-Aus Signal Ausgang
6 Eingänge / 6 Ausgänge / 1 Exklusivsignal (HBK)
FANUC I/O Link
Master Modus (Slave Modus als Option möglich)
Kommunikations-
schnittstellen
Standard : RS-232C
Option : Ethernet, Profibus, DeviceNet, etc.
Transformator
220/380/415/500 VAC (+10%, -15%)
50/60Hz ±1Hz 3 Phasen
Anschlussleistung
1 kVA
Durchschnittl.
Stromverbrauch
0,4 kW
Umgebungs-
bedingungen
Umgebungstemperatur : 0 – 45°C
Rel. Luftfeuchte : 30 – 95%, kondensations- und
frostfrei
Vibration : maximal 0,5 G
Höhe : nicht höher als 1.000 Meter über
Meeresspiegel
Traglast
Achse
1
Installation
5 Kg
240 °/sec
Boden- oder
Überkopfmontage
Achse
2
Achse
3
270 °/sec
270 °/sec
Achse
4
330 °/sec
Achse
5
480 °/sec
Max. Ge-
schwin-
digkeit
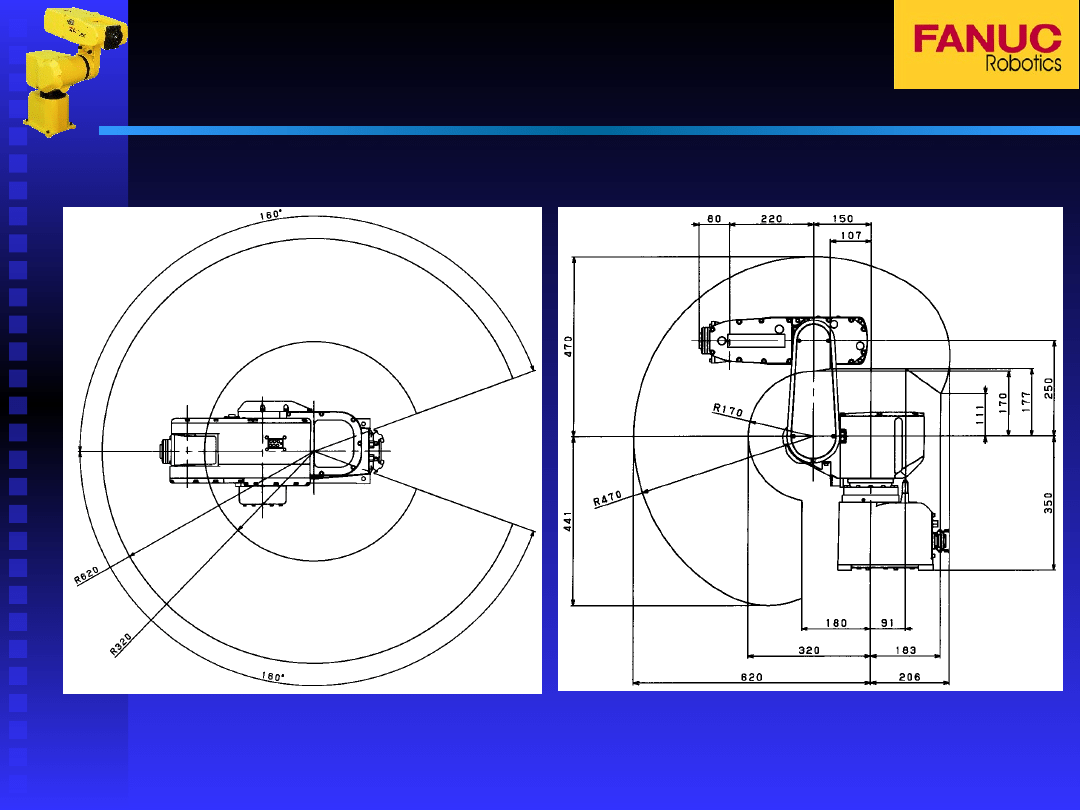
Reichweite
620 mm
Achse
4
7,25 Nm
Achse
5
5,21 Nm
Zul.
Momente
Achse
4
0,138 kgm²
Achse
5
0,071 kgm²
Zul. Mas-
senträghei
tWiederholgenauigkei
t
± 0,04 mm
29.05.21
8
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
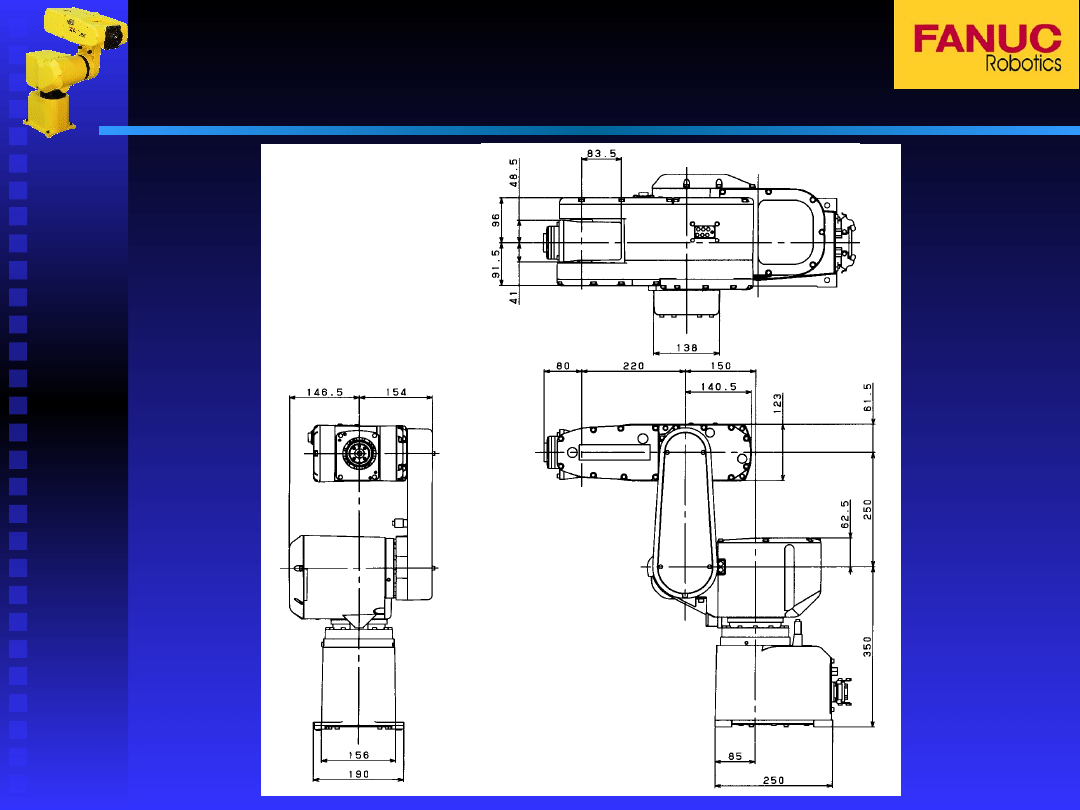
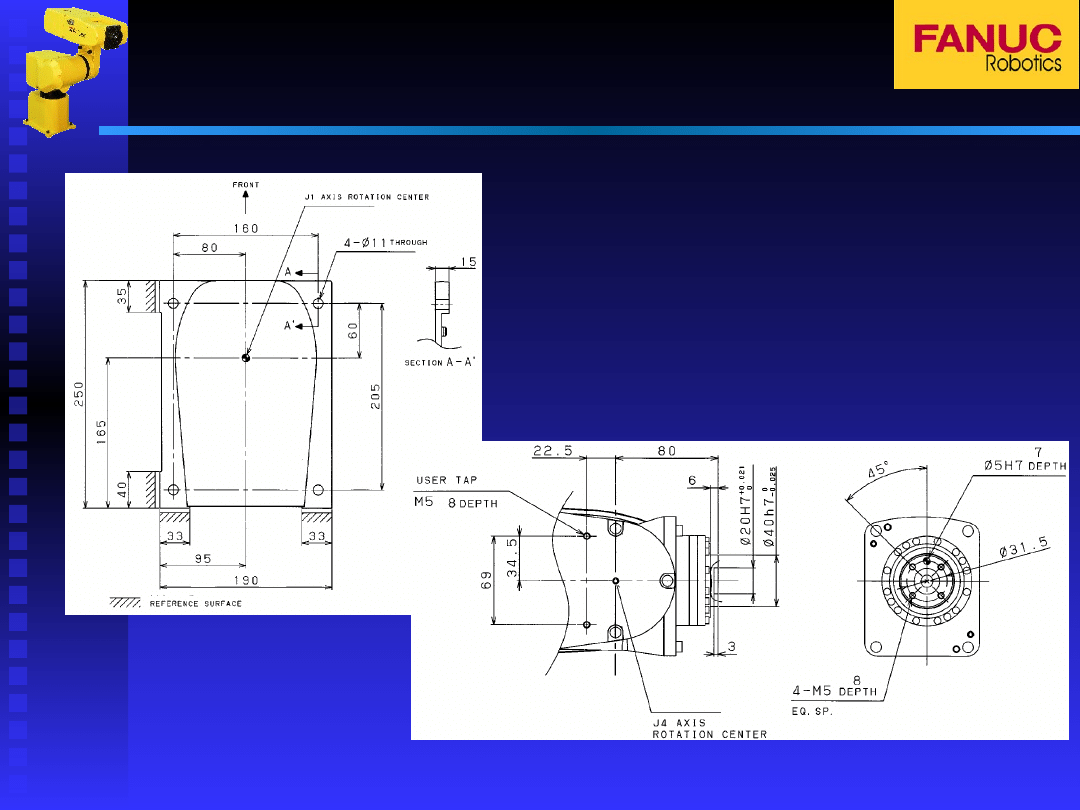
Äußere Abmessungen
29.05.21
9
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
Arbeitsbereich
29.05.21
10
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
Mechanische Schnittstellen
29.05.21
11
Anmerkun
g:Technisc
he
Änderunge
n
vorbehalte
n
1
RDI 1
2
RDI 2
3
RDI 3
4
RDI 4
5
RDI 5
6
RDI 6
7
*HBK
8
+24V
9
+24V
10
+24V
11
0V
12
RDICOM
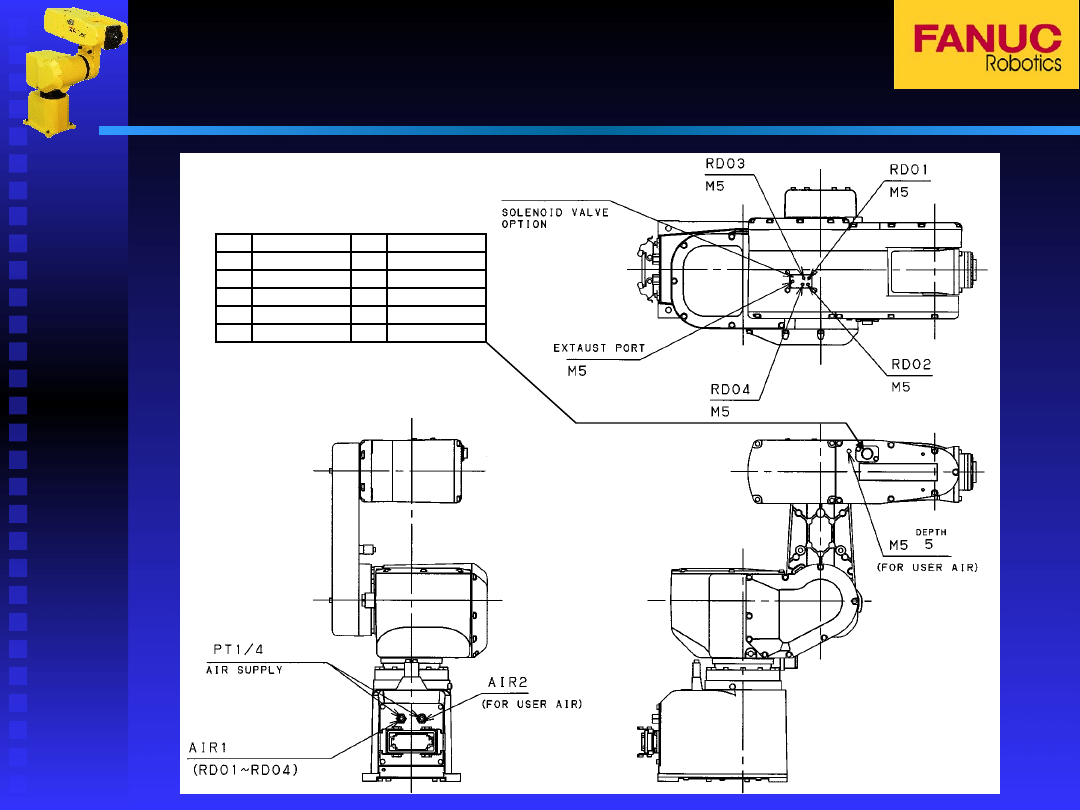
End Effector
Greiferschnittstelle
Document Outline
- FANUC Roboter LR Mate 100iB
- Eigenschaften
- Variable Funktionalitäten
- Slide 4
- Vereinfachte Wartung
- Applikationsbeispiele
- Spezifikation
- Äußere Abmessungen
- Arbeitsbereich
- Mechanische Schnittstellen
- Greiferschnittstelle
Wyszukiwarka
Podobne podstrony:
Fanuc Inteligentny robot
Fanuc Inteligentna stacja
INTELIGENCJA
Inteligencje wielorakie Howarda Gardnera w polskiej edukacji przedszkolnej
2013 MYSLENIE inteligencja
Programowanie robotów przemysłowych FANUC
Projektowanie robót budowlanych w obiektach zabytkowych
ABC Madrego Rodzica Inteligencja Twojego Dziecka
więcej podobnych podstron