Intelligente Roboter Zelle I-21
Intelligente Roboter Zelle I-21
i
i
Intelligente Roboter Zelle I-21i
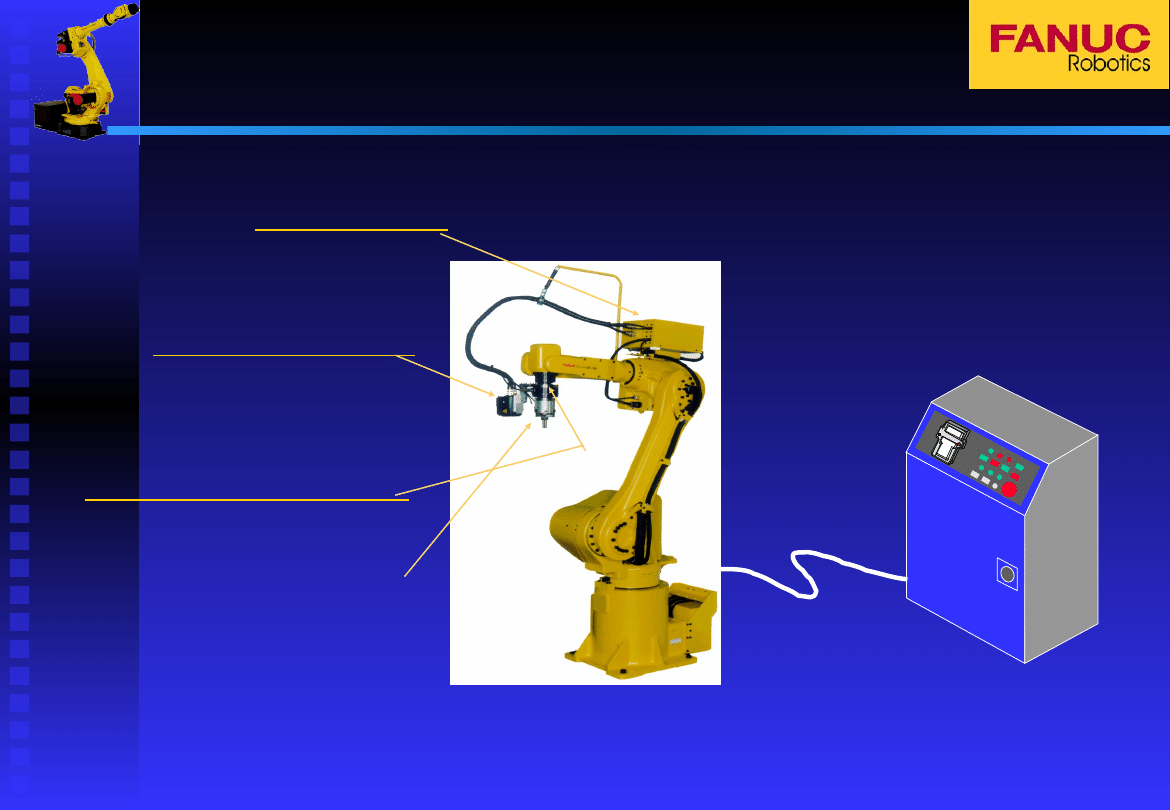
Robotersteuerung
Sensor Pre-Unit
3D-Vision Sensor
6D Kraft-Momenten Sensor
Greifer(Option)
Intelligente Roboter Zelle I-21i
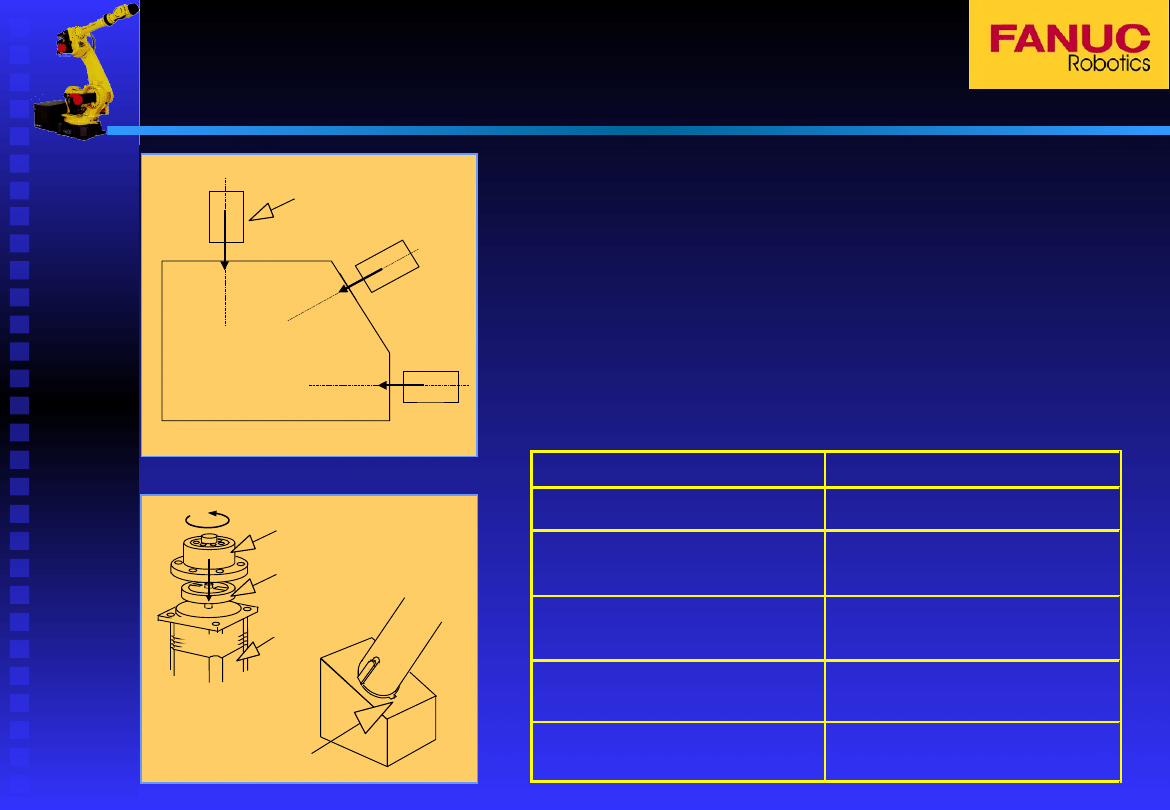
Servomotor
Getriebe(Einsatz)
Getriebe(Gehäuse)
Keilnut
Werkstück
6D - Kraft Momenten Sensor
Spezifikation
• genaues Fügen mit einer Toleranz
von H7/g7 in frei wählbare Richtungen
• Erkennen von Keilnuten und Fügen
von Getriebeteilen auf Wellen
Abmaße
118mm x 75mm
Gewicht
1,3 kg
Max. Last
Fx,Fy,Fz 30 kg
Mx,My,Mz 300 kgcm
Max. statische Überlast
Fx,Fy,Fz 210 kg
Mx,My,Mz 2100 kgcm
Auflösung
Fx,Fy,Fz 0,12 kg
Mx,My,Mz 0,6 kgcm
Genauigkeit
Fx,Fy,Fz < 0,6 kg
Mx,My,Mz < 0,6 kgcm
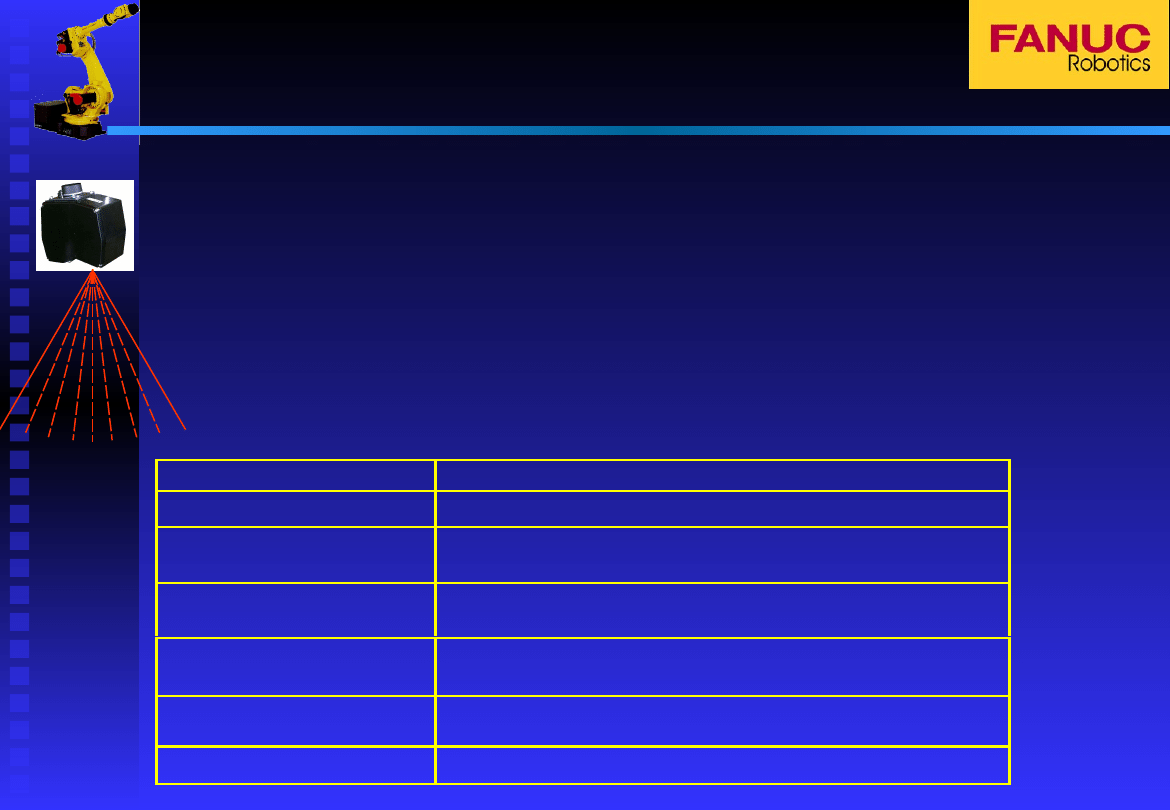
Neuer 3D Vision Sensor
• Kombinierte Messungen von
entfernten oder nahen Objekt
en durch die Kombination ein
er separaten 2D Vision Kamer
a und des am Roboter installie
rten 3D Vision Sensors
Intelligente Roboter Zelle I-21i
• Auswahl eines
Werkstückes aus einem
großen Bereich aus großer
Entfernung durch 2D CCD
Kamera und danach genaue
Lageerkennung in 6
Koordinaten aus kurzer
Distanz durch den 3D Laser
Sensor
Abmaße
136 x 151 x 72mm(H/B/T)
Gewicht
1,7 kg
Meßbereich
X, Y Achse 86mm
Z Achse 259 +/-25mm
Auflösung
X, Y Achse 0,03mm
Z Achse 0,4mm
Genauigkeit
(
Erkennung eines Kreises
mit 25mm Radius
)
Position (XYZ-Achsen) < 0,1mm
Orientierung (XY Achsen) < 0,3°
Meßzyklen
Max. 500 Punkte / Sekunde
Lichtquelle
Laser mit 685nm / 35mW / Klasse 3B
Neue Funktion
Neue Funktion
3D Vision Sensor
Minimale Peripheri
e erforderlich
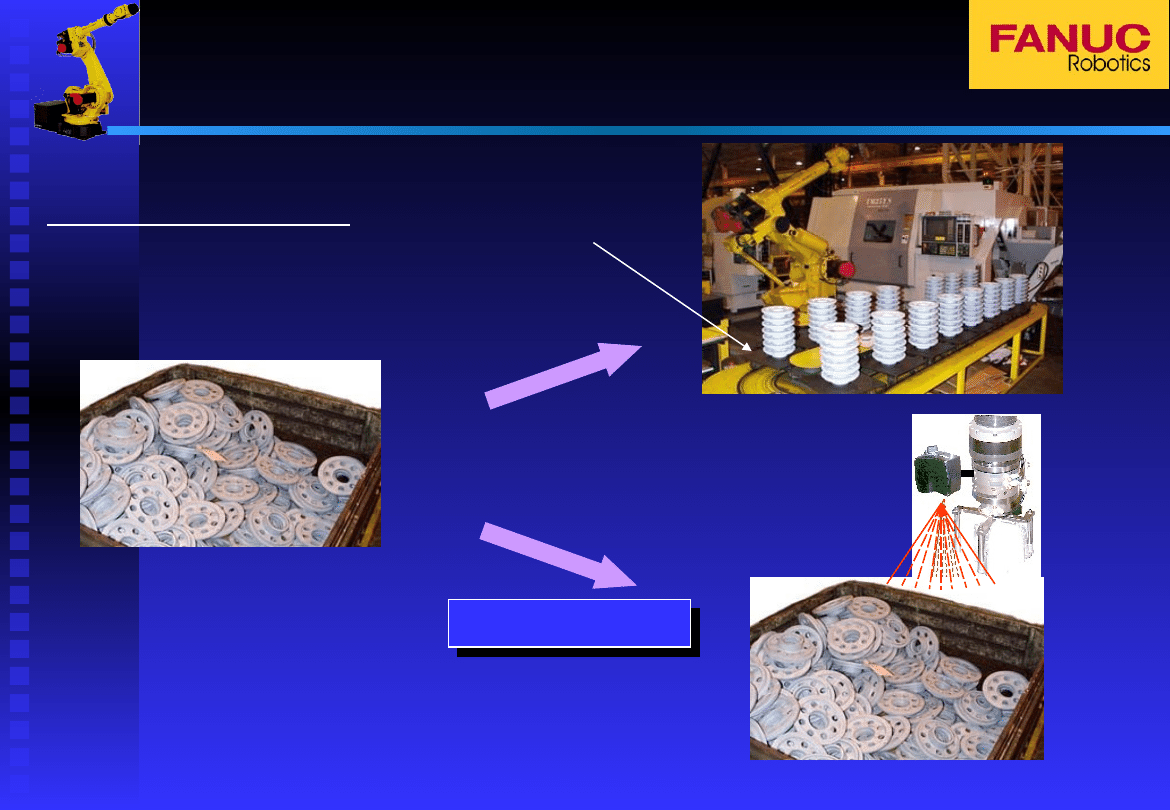
Anlieferung
der Teile
Applikation (1)
Zusätzliche
externe
Sortiereinheite
n
Konventionelle Lösung
Intelligente Roboter Zelle I-21i
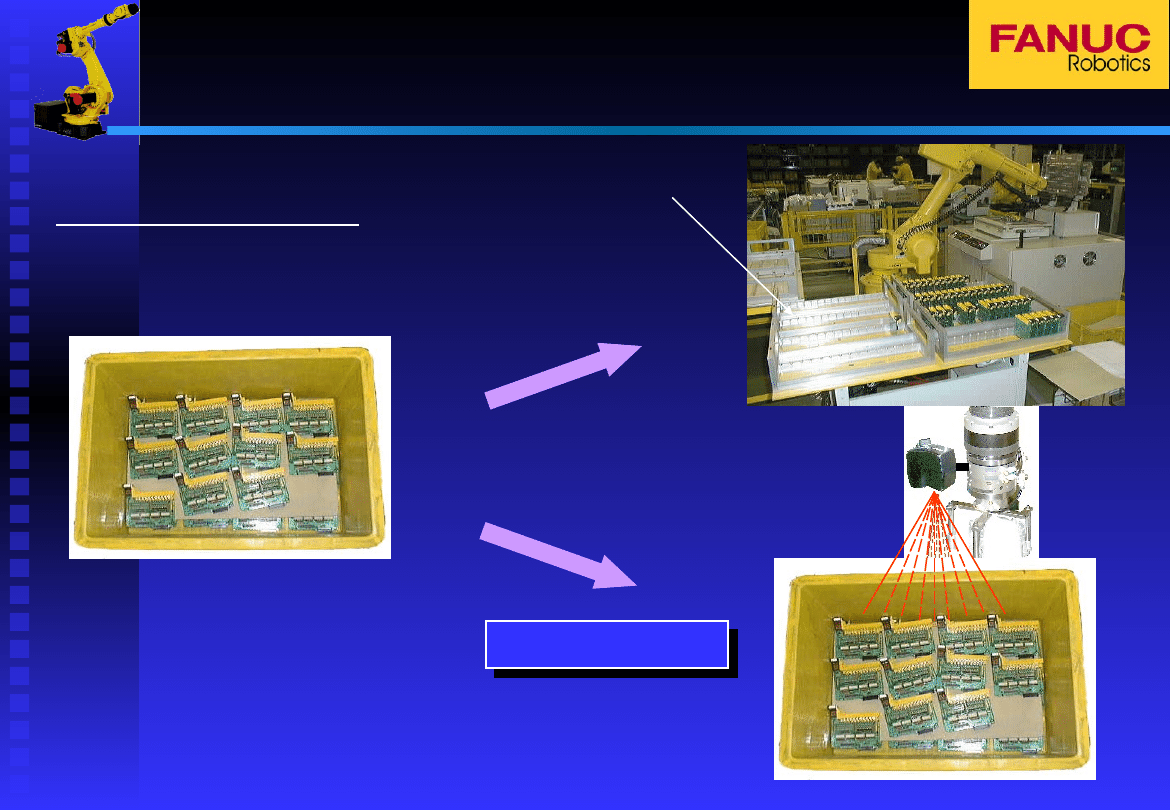
Applikation (2)
Anlieferung
der Teile
3D Vision Sensor
Neue Funktion
Neue Funktion
Minimale Peripheri
e erforderlich
Zusätzliche
externe
Sortiereinheite
n
Konventionelle Lösung
Intelligente Roboter Zelle I-21i
Neue Erkennnungsfunktionalität ermöglicht den realen Grif
in die Kiste mit wahllos verteilten Werktsücken
Intelligente Roboter Zelle I-21i
• große Reduzierung der erforderlichen externen Sortiervorrichtungen
• große Reduzierung der Investitionskosten
• Vereinfachung des Anlagenaufbaus und damit
• Vereinfachung der Anlagenbedienung
• Erhöhung der Systemverfügbarkeit durch erlaubte
Falschorienteierung der Werkstücke
Document Outline
Wyszukiwarka
Podobne podstrony:
Fanuc Inteligentny robot
Fanuc Inteligentny robot
INTELIGENCJA
Inteligencje wielorakie Howarda Gardnera w polskiej edukacji przedszkolnej
2013 MYSLENIE inteligencja
Programowanie robotów przemysłowych FANUC
ABC Madrego Rodzica Inteligencja Twojego Dziecka
AVT 2727 CYFROWA STACJA LUTOWNICZA
inteligencja emocjonalna id 218 Nieznany
Inteligentne oszczedzanie fragment
Instalacje inteligentne w budynkach
Inteligencja emocjonalna test
Elektronik Inteligentny dom Transmisja Danych Siecia id 158
Inteligentny budynek, systemy s Nieznany
Inteligenty Rozwój
więcej podobnych podstron