
Elżbieta Szwajczak
WMiFS PRz
Mechanika

MECHANIKA KLASYCZNA
KINEMATYKA
Kinematyka nie uwzględnia materii zawartej
w cząstce materialnej oraz przyczyn ruchu.
Do opisu zachowania się cząstki materialnej
w mechanice klasycznej niezbędna jest
znajomość:
położenia (zmiany położenia) – r(t),
prędkości – υ(t),
przyspieszenia – a(t)
w zależności od czasu t.

POŁOŻENIE CZĄSTKI
można przedstawić w kartezjańskim układzie
współrzędnych (x,y,z) za pomocą wektora r (tj.
wektora wodzącego punktu materialnego):
r = x + y + z
lub r = i x + j y + k z
lub r = ρ |r| = ρ r
gdzie i, j, k są wersorami,
ρ służy do pokazania kierunku wektora r w
przestrzeni - ρ = r / |r| = r / r,
x,y,z są długościami wektorów x,y,z, odpowiednio,
lub współrzędnymi końca wektora wodzącego r.
Przy czym wektor r jest funkcją czasu - r(t).

Zmiana położenia. Jeśli ciało fizyczne
znajduje się w chwili t w punkcie A, to w
punkcie B znajdzie się w chwili późniejszej
(t + Δt).
Tor ruchu – krzywa geometryczna, którą
zakreśla punkt materialny podczas swego
ruchu.
Droga – długość łuku, który punkt
materialny zakreśla podczas swego ruchu
w przedziale czasowym
<t
A
, t
B
>.
PRĘDKOŚĆ
Prędkość średnia
Prędkość chwilowa
t
t
t
t
t
r
r
r
υ
śr
)
(
)
(
dt
d
t
t
t
t
t
t
t
r
r
r
r
υ
lim
lim
0
0
)
(
)
(

Prędkość (chwilowa) jest, z punktu
widzenia fizyki, zmianą położenia ciała w
czasie, zaś z punktu widzenia matematyki
pierwszą pochodną „położenia po czasie”.
Jest to wektor styczny do toru w każdym
punkcie.
Jeśli r = ρ |r| = ρ r to (zgodnie z
definicją pochodnej iloczynu) prędkość
jako wielkość wektorowa zależy zarówno
od zmiany długości wektora wodzącego,
jak również od zmiany jego kierunku
-
- pierwszy wyraz opisuje prędkość liniową ciała tak jak
w ruchu po prostej (gdy zmianie w czasie ulega długość
wektora wodzącego r).
- drugi wyraz opisuje prędkość liniową tak jak w ruchu
po okręgu (gdy zmianie w czasie ulega kierunek wektora
wodzącego r).
-
-
dt
d
r
dt
dr
dt
d
dt
d
ρ
ρ
r
ρ
r
υ
Prędkość
)
(
)
(
)
(
t
t
t
r
ω
ρ
υ
υ
Jeśli skorzystać z wzorów Freneta, to
prędkość można przedstawić następująco
:
gdzie ω jest wektorem prędkości kątowej
.
PRZYŚPIESZENIE
Przyśpieszenie średnie
t
t
t
t
t
a
υ
υ
υ
śr
)
(
)
(
2
2
0
lim
dt
d
dt
d
t
t
a
r
υ
υ
Przyspieszenie chwilowe

Przyspieszenie całkowite
Jeśli do definicji przyspieszenia podstawić
wyrażenie na prędkość, a następnie skorzystać z
wyrażenia na wektor wodzący punktu
materialnego,
to okaże się, że:
przyspieszenie całkowite jest sumą
przyspieszenia stycznego,
przyspieszenia normalnego (w ruchu po okręgu
zwanego dośrodkowym)
oraz przyspieszenia Coriolisa,
)
8
.
1
(
a
a
a
a
C
n
s

przyspieszenie styczne
związane jest ze zmianą wartości
prędkości
liniowe j (czyli stycznej do toru) i jest
wektorem
stycznym do toru w każdym punkcie
:
dt
d
a
s
r
n
2
a
przyspieszenie normalne
występujące w ruchu krzywoliniowym, jest
wektorem skierowanym radialnie (wzdłuż
wektora wodzącego, lecz z przeciwnym
zwrotem), czyli prostopadle do krzywizny toru
w danym punkcie. W ruchu po okręgu jest
skierowany
wzdłuż promienia okręgu, do środka okręgu i
nazywa się
przyspieszeniem dośrodkowym
.

przyspieszenie Coriolisa
Przyspieszenie Coriolisa
υ'
ω
C
2
a
występuje wtedy, gdy cząstka
poruszająca się z prędkością liniową υ’
znajduje się w wirującym układzie
odniesienia (z prędkością kątową ω).
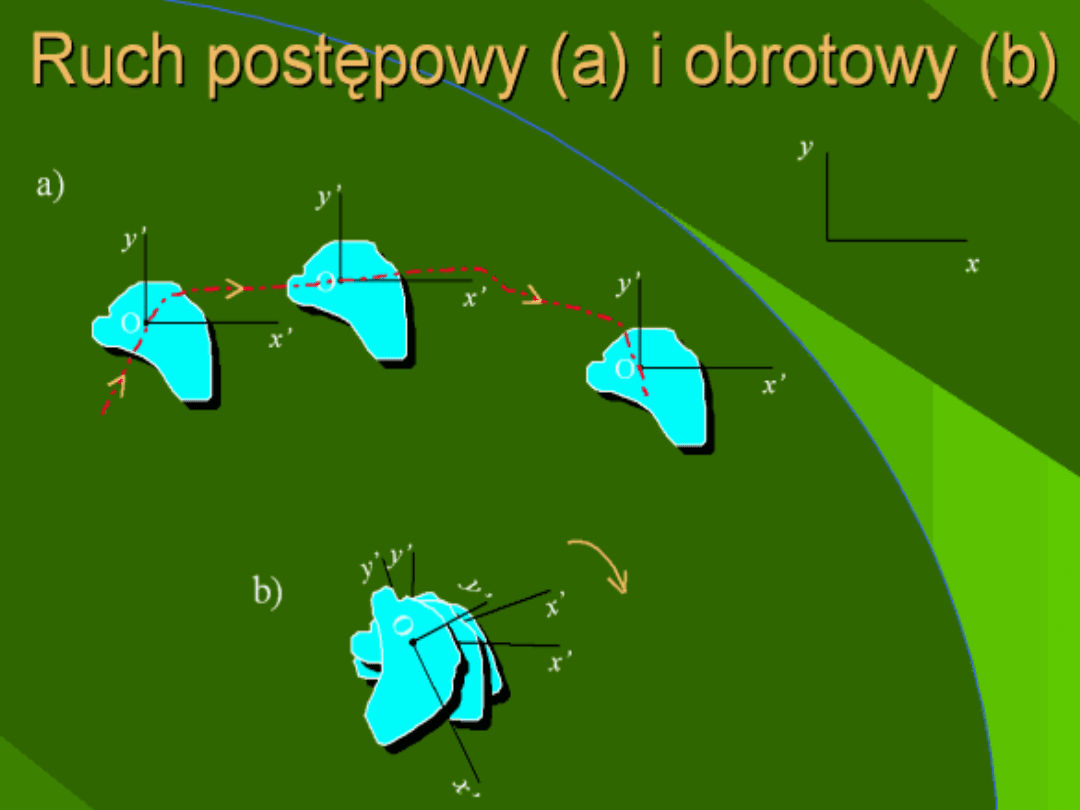
Występuje zatem przy złożeniu równoczesnych
ruchów: postępowego i obrotowego.
Przykład – podmywanie brzegów rzek płynących
południkowo.

KLASYFIKACJA RUCHÓW
Klasyfikacja ruchów ze względu na:
* tor ruchu
* przyspieszenie.
Klasyfikacja została dokonana ze względu
na
przyspieszenie w ruchu postępowym i
obrotowym (bez zapisu wektorowego).

TAB.
prostoliniowy
krzywoliniowy/obrotowy
t
t
s
s
dt
d
dt
ds
const
const
a
o
o
t
t
s
s
o
0
0
0
.
.
0
0
jednostajny
2
2
)
(
)
(
)
0
,
0
(
)
0
,
0
(
2
2
0
0
0
0
0
t
t
at
t
s
s
dt
t
d
dt
at
ds
t
at
dt
d
dt
a
d
const
o
a
const
a
o
o
o
o
t
o
t
o
s
s
o
o
t
t
o
o
o
Jednostajnie zmienny
(przyspieszony,
opóźniony)

dt
d
dt
ds
dt
d
dt
a
d
const
const
a
zmienny
całkowanie !!!
należy uwzględnić zapis wektorowy

DYNAMIKA
Zasady dynamiki Newtona
W dynamice szukamy związków między
oddziaływaniem ciał a ich ruchem.
Podstawę dynamiki stanowią zasady
dynamiki Newtona.
Oddziaływanie ciał może być bezpośrednie
lub na
odległość (poprzez pole).
Zasady dynamiki obowiązują w inercjalnych
układach
odniesienia.

I zasada dynamiki
Ciało pozostaje w spoczynku (υ=0) lub
porusza się ruchem jednostajnie
prostoliniowym (υ=const) jeżeli na ciało
nie działają żadne siły (F=0) lub działające
siły równoważą się (∑F
i
=0).
Jest to tzw. zasada bezwładności.
0
lub
0
1
υ
υ
F
i
const
to
Jesli
i
II zasada dynamiki
dt
d
to
Jesli
n
i
p
F
F
F
i
1
gdzie p = m υ, jest to pęd równy iloczynowi
masy m i prędkości υ punktu materialnego.
Jeżeli na ciało działają siły niezrównoważone
to zmienia się w czasie pęd ciała; czyli
zmianie może ulegać prędkość ciała, jak
również jego masa.
a
υ
υ
υ
υ
F
m
dt
dm
dt
d
m
dt
dm
dt
m
d
)
(

To prawo można przedstawić inaczej:
t
dt
d
F
p
F
p
lub
przyrost pędu ciała równy jest popędowi
siły wywartemu na to ciało.
Jeżeli masa poruszającego się ciała nie
zmienia się w
czasie (m=const), to druga zasada dynamiki
Newtona
przyjmuje postać:
a
F m
Siła zatem jest wielkością proporcjonalną do
przyspieszenia, które nadaje ciału, przy czym
współczynnikiem proporcjonalności jest masa
ciała.

III zasada dynamiki
Jeżeli ciało A działa na ciało B siłą F, to ciało B
działa na ciało A siła -F, równa co do wartości
bezwzględnej lecz z przeciwnym zwrotem.
BA
AB
F
F
Prawo to uwzględnia rodzaj czy sposób
oddziaływań ciał. Znane jest jako prawo akcji i
reakcji.

Równanie ruchu cząstki
materialnej (
gdy m=const
)
w inercjalnym układzie
odniesienia
n
i
gdzie
m
1
i
F
F
F
a
w nieinercjalnym układzie odniesienia
3
1
j
gdzie
m
bj
b
n
1
i
i
b
F
F
F
F
F
F
a

Jeśli ruch punktu materialnego rozpatrujemy
w nieinercjalnym układzie odniesienia, to
oprócz sił które występują w układach
inercjalnych (będących wynikiem
wzajemnego oddziaływania ciał), należy
dodatkowo uwzględnić siły bezwładności.
Przy czym siły bezwładności (pozorne,
rzekome) to siły „przekory”, tzn. zwrot siły
bezwładności F
b
jest przeciwny do zwrotu
przyspieszenia układu a
u.
u
b
a
F
m
II zasada dynamiki Newtona
w ruchu obrotowym
(krzywoliniowym)
dt
d
to
Gdy
n
i
K
M
M
M
i
1
gdzie M jest momentem siły, K momentem
pędu:
p
r
K
F
r
M

Jeśli w czasie ruchu nie zmienia się masa
ciała
(bryły sztywnej) ani też rozkład masy czyli
moment bezwładności jest stały (I=const),
to druga
zasada dynamiki przyjmuje postać:
const
I
dla
I
ε
M
Gdzie moment bezwładności definiuje się
następująco
:
ego
materia
punktu
dla
m
I
ych
materia
punktów
n
ukladu
dla
m
I
sztywnej
bryly
dla
dm
I
n
i
ln
ln
2
1
2
2
r
r
r
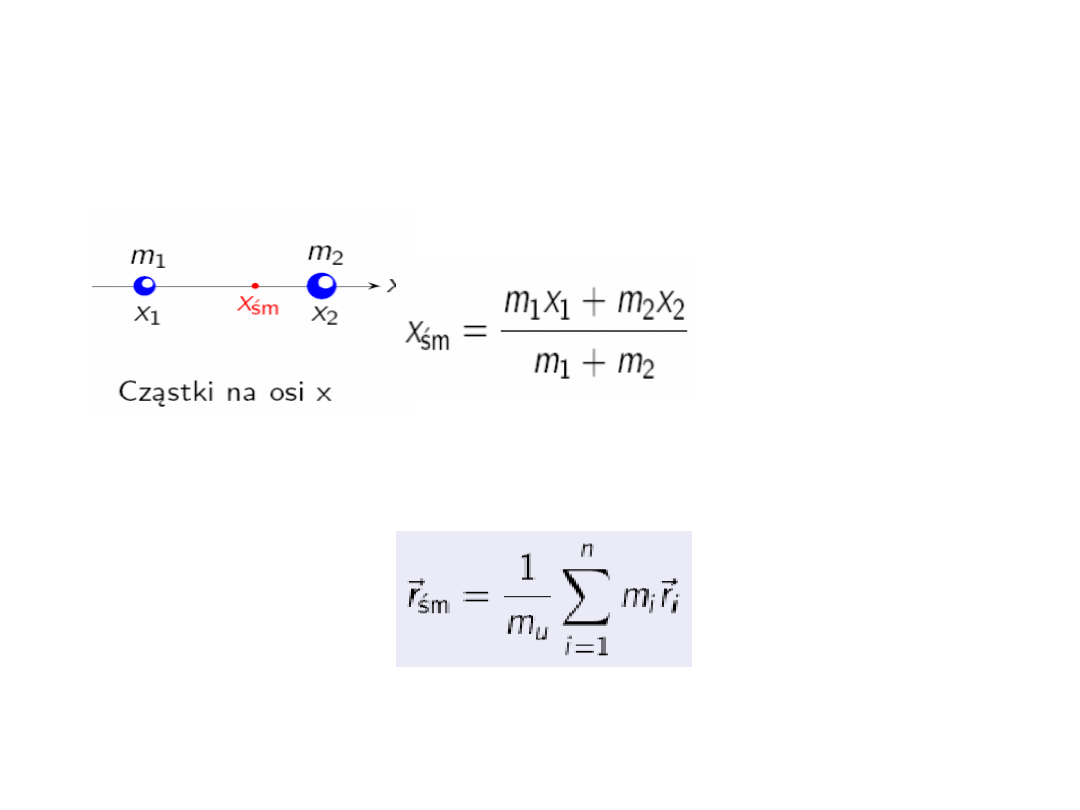
Środek masy
1. dwie cząstki na
osi
x
2. n cząstek w przestrzeni 3D

Zasady zachowania
Praca – moc, energia
Zasady zachowania
Związki pomiędzy wielkościami charakterystycznymi
w ruchu prostoliniowym i obrotowym bryły sztywnej
dookoła nieruchomej osi

Ruch w polu grawitacyjnym
ziemskim
- przykłady
1. Rzuty pionowe:
- rzut pionowy w górę
- swobodny spadek
- rzut pionowy w dół
2. Składanie ruchów:
- rzut poziomy
- rzut poziomy
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
Wyszukiwarka
Podobne podstrony:
WYKLAD MECHANIKA kinematyka dynamika PREZENTACJA
Mechanika Ogólna Kinematyka Dynamika
Mechanika Ogólna, Kinematyka Dynamika
kinematyka i dynamika, Politechnika Lubelska, Mechanika
kinematyka i dynamika punktu materialnego, Studia 1, I rok, mechanika
Mechanika ogolna Kinematyka i dynamika 2 id 2910
kinematyka dynamika, MECHANIKA
Newton jest jak Herkules z bajki, Księgozbiór, Studia, Mechanika Płynów i Dynamika Gazów
PLYNY4~1, Księgozbiór, Studia, Mechanika Płynów i Dynamika Gazów
Podstawowe charakterystyki temperatury powietrza, Księgozbiór, Studia, Mechanika Płynów i Dynamika G
mechanika kinematyka predkosc poczatkowa hustawki
ruch laminarny2, Księgozbiór, Studia, Mechanika Płynów i Dynamika Gazów
POLITE~2, Księgozbiór, Studia, Mechanika Płynów i Dynamika Gazów
więcej podobnych podstron