Wyznaczenie pozycji z obserwacji sztucznych satelitów Ziemi
1. Z pomiarów odległości do satelity
d
1
, d
2
, d
3
– pomierzone
odległości do satelitów,
na ogół każda w innym
momencie, przypadek
trudniejszy będzie
omówiony później
W przypadku pomiaru w tym
samym momencie (n.p. do
kilku satelitów) ma to n.p.
miejsce w przypadku
technologii GPS . Rozwiązanie
polega na obliczeniu
przestrzennego wcięcia
liniowego.
Równania układamy w tym układzie współrzędnych, w którym
znamy położenie satelity (układzie niebieskim ICRF)
X
i
ITRF
,
Y
i
ITRF
, Z
i
ITRF
– współrzędne i-tego satelity w układzie ICRF
x
ICRF
, y
ICRF
, Z
ICRF
– współrzędne punktu P w układzie ICRF
Równania dla kul przyjmują postać
2
3
2
3
2
3
2
3
2
2
2
2
2
2
2
2
2
1
2
1
2
1
2
1
d
z
Z
y
Y
x
X
d
z
Z
y
Y
x
X
d
z
Z
y
Y
x
X
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
W tym układzie będą trzy niewiadome x
ICRF
, y
ICRF
, z
ICRF
– wyznaczane
współrzędne punktu w układzie ICRF.
Tych jednoczesnych pomiarów może być więcej niż 3. W tym przypadku:
2
2
2
z
Z
y
Y
x
X
d
i
i
i
i
(1)
Napiszemy równanie obserwacyjne w metodzie pośredniczącej:
dz
dxdy
dd
d
v
d
i
obl
i
i
obs
i
,
gdzie:
i
v
obs
i
d
obl
i
d
dz
z
d
dy
y
d
dx
x
d
dd
i
i
i
i
- poprawka do pomierzonej i-tej odległości
- zaobserwowana odległość do satelity
- obliczona przy pomocy wzoru (1) wartość odległości,
gdzie podstawiamy przybliżone wartości współrzędnych
wyznaczanego punktu x
przybl
, y
przybl
, z
przybl

Równanie obserwacyjne przy założeniu bezbłędnej orbity przyjmie postać
i
l
obs
i
obl
i
i
i
i
i
d
d
dz
z
d
dy
y
d
dx
x
d
v
gdzie: d
x
, d
y
, d
z
– poszukiwane niewiadome (poprawki do
przybliżonych współrzędnych punktu wyznaczanego)
i
i
i
i
i
i
c
dz
d
b
dy
d
a
dx
d
Współczynniki przy niewiadomych uzyskujemy różniczkując (1)
obs
i
obl
i
i
d
d
l
wyraz wolny w równaniu poprawek
podstawiając otrzymamy:
i
i
i
i
i
l
dz
c
dy
b
dx
a
v
albo w postaci krakowianowej
l
a
x
v
dz
dy
dx
x
n
n
n
c
b
a
c
b
a
c
b
a
...
...
...
2
2
2
1
1
1
a
n
l
l
l
...
2
1
l
gdzie:
v – krakowian poprawki do obserwacji
x – krakowian niewiadomych
τ – krakowian jednostkowy
l – krakowian wyrazów wolnych
następnie układamy krakowianowy układ równań normalnychla
xa
2
rozwiązując otrzymamy:
1
2
a
la
x
Lub w zapisie macierzowym
równanie obserwacyjne:
L
AX
V
gdzie:
dz
dy
dx
X
n
n
n
c
b
a
c
b
a
c
b
a
...
...
...
2
2
2
1
1
1
A
n
l
l
l
...
2
1
L
dla obserwacji niejednakowo dokładnych, używając macierzy wag:
n
P
P
P
1
...
1
B
P
2
0
σ
x
cov
B
n
n
σ
PV
V
T
2
0
ˆ
gdzie:
2
0
ˆ
σ
- estymator współczynnika wariancji
n
n
- liczba stopni swobody (obserwacji nadliczbowych)
Równania normalne mają postać:
0
PL
A
PA
A
T
T
niewiadome i ich charakterystyki dokładności
PL
A
PA
A
X
T
T
1
ˆ
n
n
σ
PV
V
T
2
0
ˆ
1
2
0
cov
PA
A
T
x
Schemat obliczeń
Dane: a, e, i , , , t
p
– parametry orbity oskulacyjnej na moment
obserwacji t obliczamy na przykład następująco dla każdego z
powyższych elementów:
...
2
1
..........
..........
..........
..........
..........
..........
...
2
1
...
2
1
2
0
2
2
0
0
2
0
2
2
0
0
2
0
2
2
0
0
t
t
t
t
t
t
t
t
t
t
t
t
t
e
t
t
t
e
e
e
t
t
t
a
t
t
t
a
a
a
p
p
p
p
lub też n.p. dla elementu a:
t
t
dt
t
a
a
a
0
0
gdzie:
a
0
, e
0
, t
0
,
0
,
0
, (t
p
)
0
– wartości średnich elementów
orbity na moment t
0
Mając dane parametry orbity oskulacyjnej obliczamy X
i
ICRF
, Y
i
ICRF
,
Z
i
ICRF
na moment wykonania obserwacji
i dalej według schematu
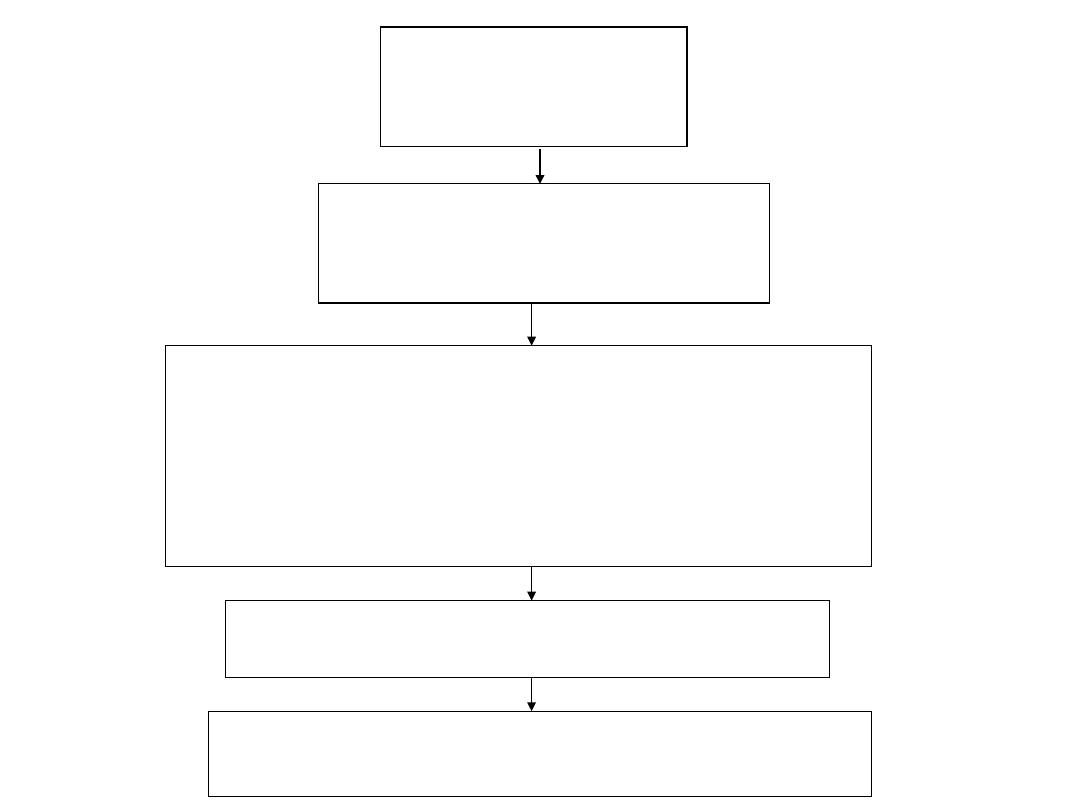
Dane początkowe
a
0
, e
0
, t
0
,
0
,
0
, (t
p
)
0
na moment t
0
Obliczenie parametrów
orbity oskulacyjnej na
moment obserwacji t
a, e, i, , , t
p
Obliczenie współrzędnych „n” satelitów w
układzie ICRF
ICRF
n
ICRF
n
ICRF
n
ICRF
ICRF
ICRF
ICRF
ICRF
ICRF
Z
Y
X
Z
Y
X
Z
Y
X
,
,
.......
..........
..........
,
,
,
,
2
2
2
1
1
1
Ułożenie i rozwiązanie równań
obserwacyjnych – obliczenie pozycji
punktu w układzie ICRF
Transformacja współrzędnych punktu do układu ITRF
(precesja, nutacja, ruch bieguna, kąt ERA)

Podobnie można wyznaczyć pozycję punktu z niejednoczesnych
obserwacji odległości do satelitów, w tym przypadku jednak
będziemy posługiwali się pozycją satelity w układzie ziemskim
ITRF.
Schemat obliczeń będzie następujący dla i-tego satelity w momencie obserwacji
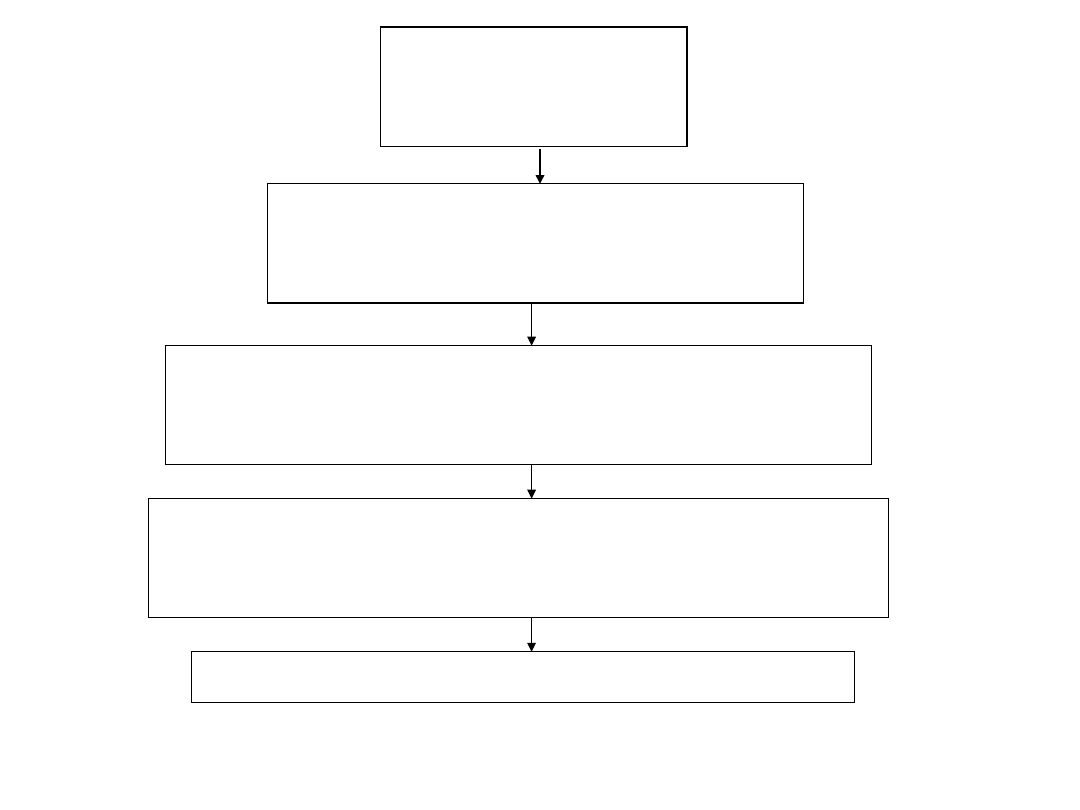
Dane początkowe
na moment t
0
a
0
, e
0
, t
0
,
0
,
0
, (t
p
)
0
Obliczenie parametrów orbity
oskulacyjnej na moment
obserwacji i-tego satelity t
i
a, e, i, , , t
p
Obliczenie współrzędnych i-tego satelity w
momencie czasu t
i
w układzie ICRF
ICRF
i
ICRF
i
ICRF
i
Z
Y
X
,
,
TRANSFORMACJA współrzędnych i-tego
satelity w momencie , do układu ITRF
obliczenie X
i
ITRF
, Y
i
ITRF
, Z
i
ITRF
Transformacja o precesję, nutację, ruch
bieguna i kąt ERA
Ułożenie równań obserwacyjnych w układzie ITRF
Podobnie układy równań obserwacyjnych dla kolejnych obserwacji i=1,2,3 ....
Rozwiązujemy metodą najmniejszych kwadratów.
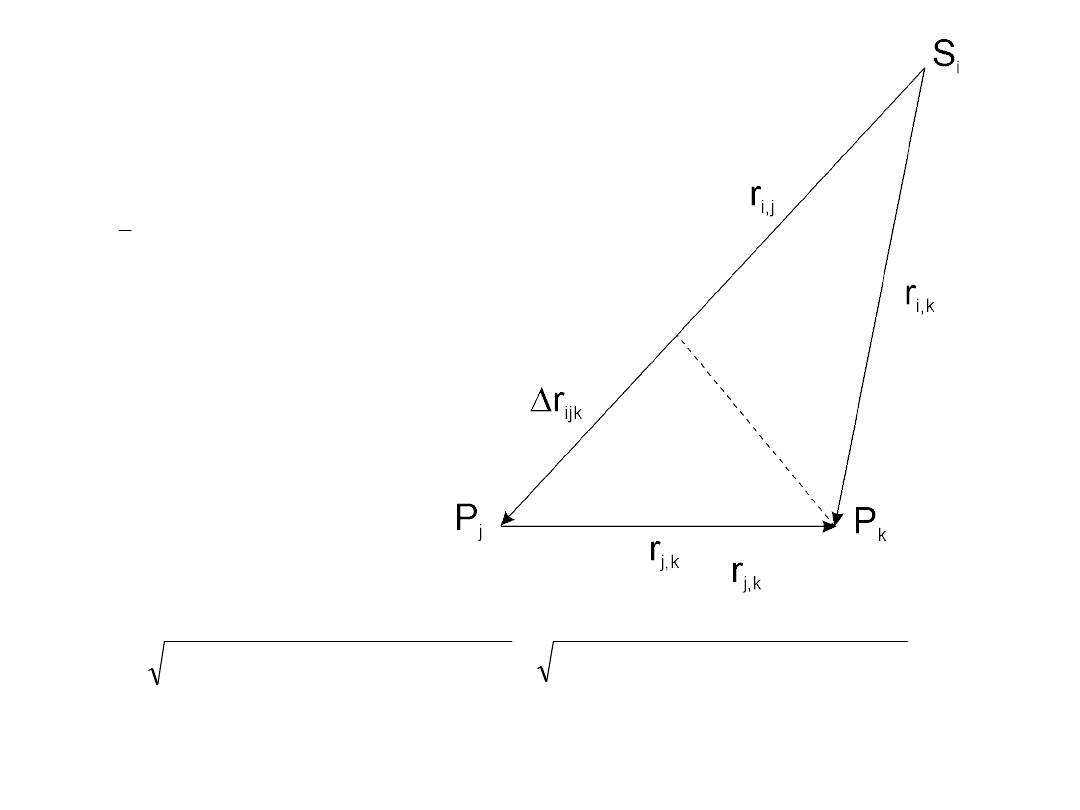
2. Wyznaczenie pozycji z pomiarów różnych długości
kj
kj
kj
j
k
j
k
j
k
z
y
x
z
z
y
y
x
x
jk
r
ijk
r
- pewna różnica odległości
2
2
2
2
2
2
k
i
k
i
k
i
j
i
j
i
j
i
ijk
z
Z
y
Y
x
X
z
Z
y
Y
x
X
r

Równanie obserwacji
ijk
obl
ijk
ijk
pom
ijk
r
d
r
v
r
kj
kj
kj
ijk
ijk
dz
dy
dx
r
d
r
d
,
,
pom
ijk
obl
ijk
kj
kj
ijk
kj
kj
ijk
kj
kj
ijk
ijk
r
z
d
z
d
r
y
d
y
d
r
x
d
x
d
r
v
Równanie obserwacyjne przyjmie postać
ijk
kj
ijk
kj
ijk
kj
ijk
ijk
l
y
d
C
y
d
B
x
d
A
v
Rozwiązując układ równań obserwacyjnych metoda najmniejszych
kwadratów uzyskamy wyrównane wartości przyrostów
współrzędnych i ich charakterystyki dokładności
Document Outline
Wyszukiwarka
Podobne podstrony:
geodezja satelitarna skrypt 2 ppt
geodezja satelitarna skrypt 4 ppt
geodezja satelitarna skrypt 6 ppt
geodezja satelitarna skrypt 2 ppt
zagadnienia GeoSat, Geodezja i Kartografia, II rok, Geodezja Satelitarna
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
sciaga satka 2 terminI, Geodezja, Geodezja Satelitarna, Materialy
GiNS Geodezja satelitarna sem 3
GPS galileo glonass, Geodezja, geodezja satelitarna
satelitarna opracowanie, PYTANIA NA EGZAMIN Z GEODEZJI SATELITARNEJ
Cwiczenie 2 AO, GEODEZJA, III semestr, Geodezja satelitarna, ćwiczenia III sem
PYTANIA NA EGZAMIN Z GEODEZJI SATELITARNEJ, Geodezja, 03sem, ges
Pytania ze sprawdziaz satki, gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna
GEODEZJA SATELITARNA, Studia, II, Satelitarna
pytania na egzamin z geodezji satelitarnej opracowane
satelitarna ściaga pilne druk, Geodezja i Kartografia UWMSC, Geodezja satelitarna
więcej podobnych podstron