
Wykład 1
Wykład 1
Kinematyka punktu
MECHANIKA (OGÓLNA)
- jest nauką badającą ogólne
prawa ruchu obiektów materialnych (ciał) i ich wzajemne
oddziaływania.
Mechanikę ogólną dzielimy na:
STATYKĘ, KINEMATYKĘ i DYNAMIKĘ
Semestr III:
KINEMATYKA i DYNAMIKA.
1.1 Pojęcia
podstawowe

Pojęcia podst.
1
• Obiekty materialne:
wyidealizowane schematy ciał rzeczywistych.
• Wyróżniamy:
punkt materialny ( w skrócie PM),
układ punktów materialnych (UPM),
ciało sztywne (CS).
• Ruch - j
est to zjawisko zmiany położenia
ciała względem innego ciała uznanego
umownie za nieruchome.
Nieruchome ciało nazywamy ciałem
odniesienia.
•
W
W
niosek
niosek
:
:
ruch jest wzgl
ruch jest wzgl
ę
ę
dny tzn. zale
dny tzn. zale
ż
ż
y od
y od
wyboru
wyboru
cia
cia
ł
ł
a odniesienia.
a odniesienia.

•Czas -
jest w mechanice klasycznej (Newtona)
pojęciem pierwotnym i absolutnym.
•Czas nie zależy od wyboru układu odniesienia i
jest taki sam w każdym punkcie przestrzeni.
•Przyjmuje się, że czas jest stale nieujemny
t
0
i występuje tylko wtedy gdy występuje ruch.
•Układ odniesienia -
jest to układ
współrzędnych sztywno związany z ciałem
odniesienia, który służy do opisu ruchu obiektu
(-ów).
Pojęcia podst. 2
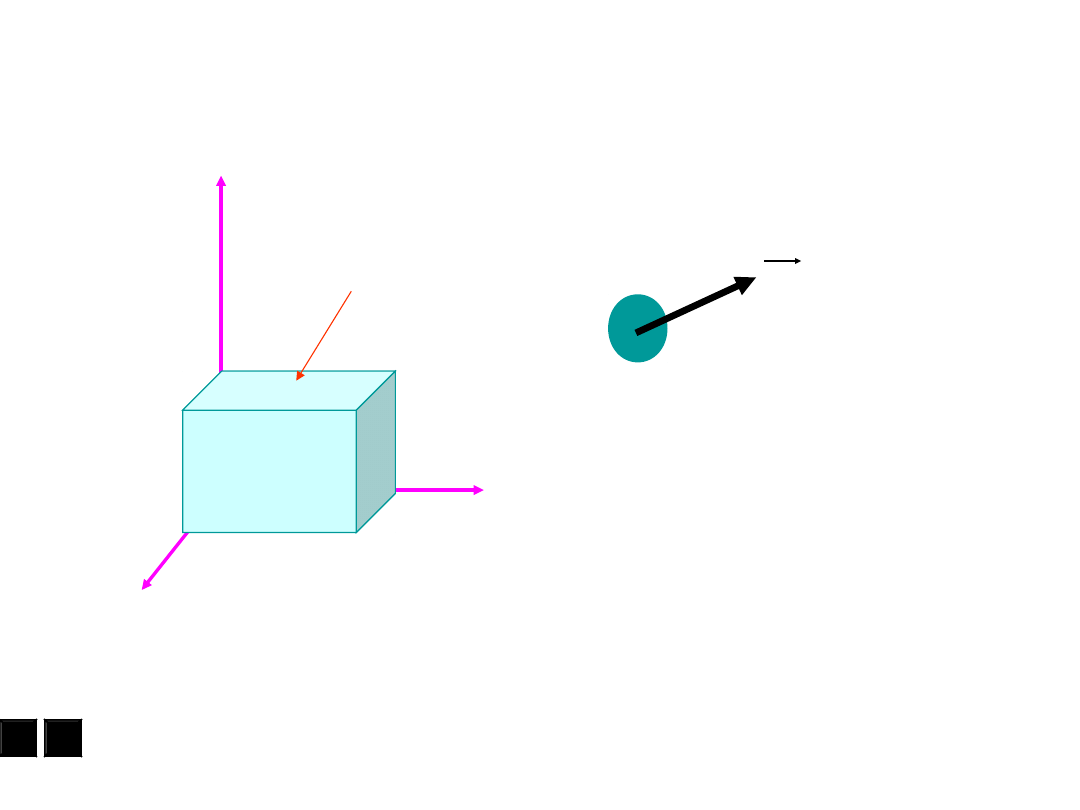
Układ odniesienia
Oxyz – układ odniesienia, prostokątny prawoskrętny układ
współrzędnych
Obiekt ruchomy
względem Oxyz
V
UKŁAD ODNIESIENIA
O
x
y
z
Ciało
odniesienia
(nieruchome)

Kinematyka p-
tu 1
• Kinematyka
- jest to dział mechaniki,
w którym bada się ruch obiektów bez
wnikania w przyczyny wywołujące ten
ruch.
• Można ją nazwać geometrią ruchu,
bowiem do opisu tego ruchu stosujemy
pojęcia przestrzeni i czasu.
1.2 Kinematyka punktu w
układzie Oxyz
Wielkości
kinematyczne
Wielkości fizyczne w
kinematyce
1.
Droga, przesuni
Droga, przesuni
ę
ę
cie, przemieszczenie
cie, przemieszczenie -
[translacja -
m
, obrót -
rad
]
2.
Pr
Pr
ę
ę
dko
dko
ść
ść - [
m/s
,
rad/s
]
3.
Przyspieszenie
Przyspieszenie - [
m/s
2
,
rad/s
2
]
4.
Tor ruchu punktu
Tor ruchu punktu - równanie krzywej, po
której następuje ruch tego punktu, np.:
y = y(x) y = 3x
2
– 6x + 5

Opis ruchu p-
tu
Matematycznie ruch punktu opisujemy w
postaci wektorowej lub skalarnej. Opisy te
są równoważne.
Opis ruchu punktu
Równanie wektorowe
ruchu:
)
t
(
r
r
Równania skalarne w układzie
Oxyz:
x=x(t), y=y(t), z=z(t)
y
x
O
y
z
x
e
e
z
e
r
r(t+
t)
r
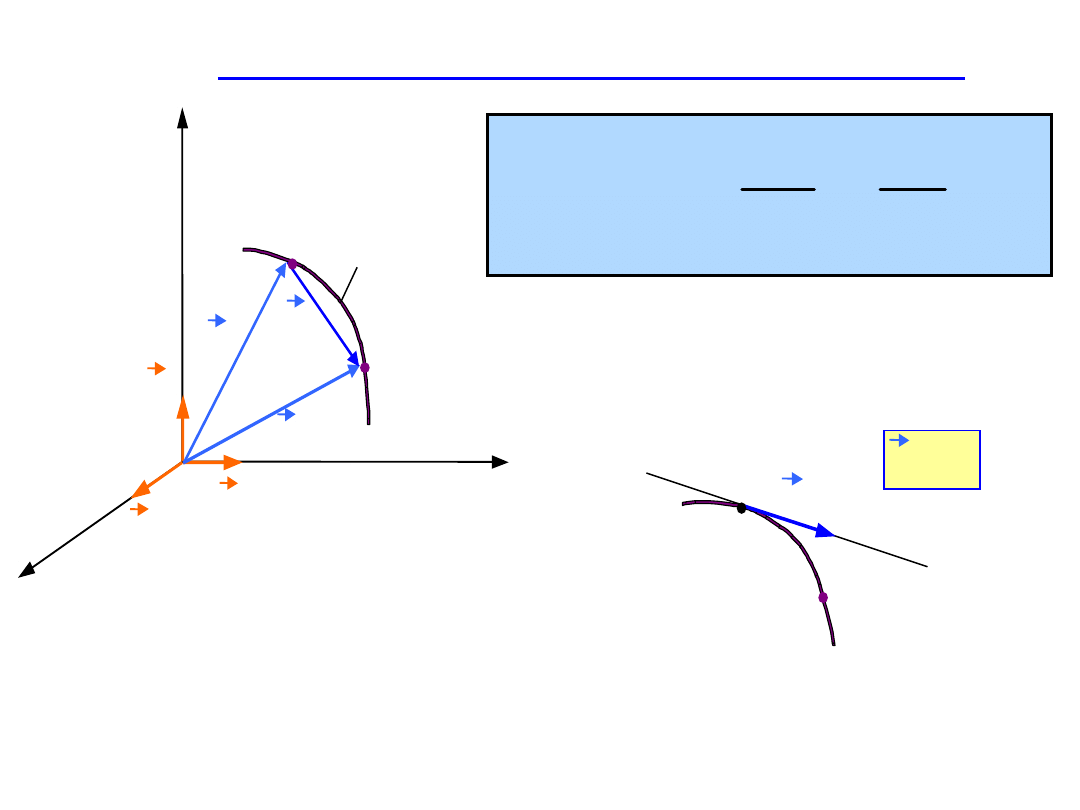
Prędkość p-tu w
Oxyz
A(t +
t)
tor
A(t)
s
r
dt
r
d
t
r
v
lim
0
t
- styczna do toru w punkcie A(t)
A(t)
A(t+
t)
v(t)
TOR
v
Prędkość punktu w Oxyz
Prędkość
c.d.
Moduł wektora prędkości jest wartością prędkości.
NIE MYLIĆ pojęć wektora prędkości i jej wartości !
Wektor prędkości:
]
v
,
v
,
v
[
v
e
v
e
v
e
v
z
y
x
z
z
y
y
x
x
2
2
2
z
y
x
v
v
v
|
v
|
v
Wartość prędkości (długość
wektora):
przy czym
z
v
,
y
v
,
x
v
z
y
x
Prędkość c.d.
Elementarna droga po torze:
dt
v
v
v
ds
z
y
x
2
2
2
Jeśli znamy s=s(t) to prędkość możemy obliczyć z
zależności:
s
dt
ds
v
Przysp. p-tu w
Oxyz
r
v
a
lub
;
dt
r
d
dt
v
d
a
2
2
Przyspieszenie punktu w Oxyz
UWAGA: wektor przyspieszenia punktu ma na ogół
inny kierunek niż wektor prędkości !
Moduł przyspieszenia (długość wektora
przyspieszenia):
2
2
2
z
y
x
a
a
a
|
a
|
a
Przysp. p-tu c.d
;
z
v
a
;
y
v
a
;
x
v
a
)
e
v
e
v
e
v
(
dt
d
a
z
z
y
y
x
x
z
z
y
y
x
x
Wektor przyspieszenia i jego współrzędne:
O
y
z
x
r(t)
A
V
a
!
()
a
v
Uwaga: wektor przyspieszenia ma na
ogół inny kierunek niż wektor
prędkości.
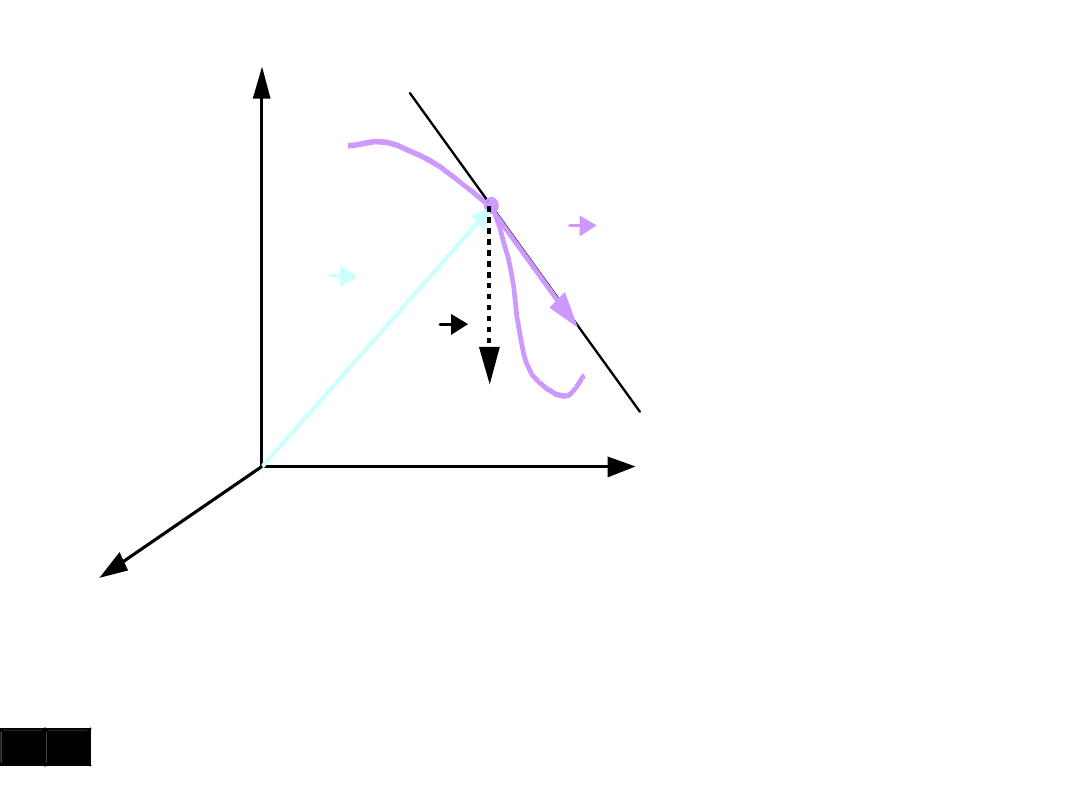
Przysp. p-tu c.d.

14
1.3 Kinematyka p-tu w układzie
naturalnym
Założenia:
s(t)
s
gdzie
);
s
(
r
r
- Ruch punktu jest dany w postaci:
- Początek układu współrzędnych jest
związany
z ruchomym punktem A na torze.
Układ taki nazywamy naturalnym
lub
trójścianem Freneta.
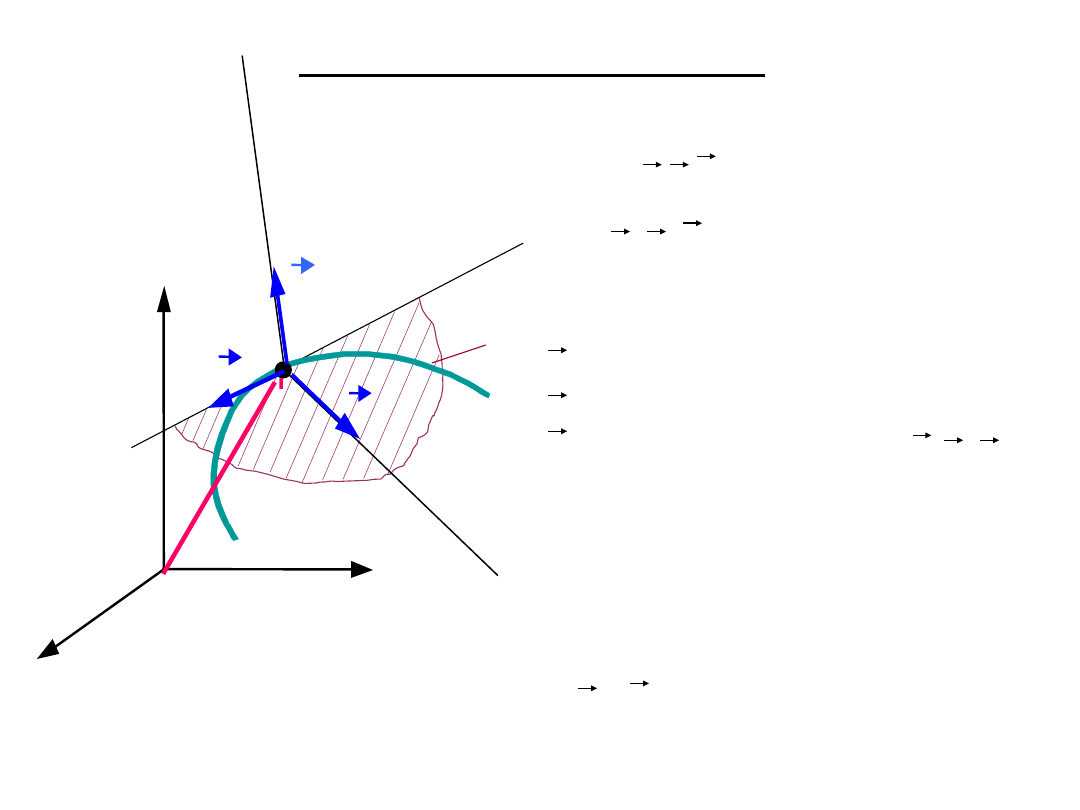
– wersor ściśle styczny,
n – wersor normalny
główny,
b – wersor binormalny
b=n
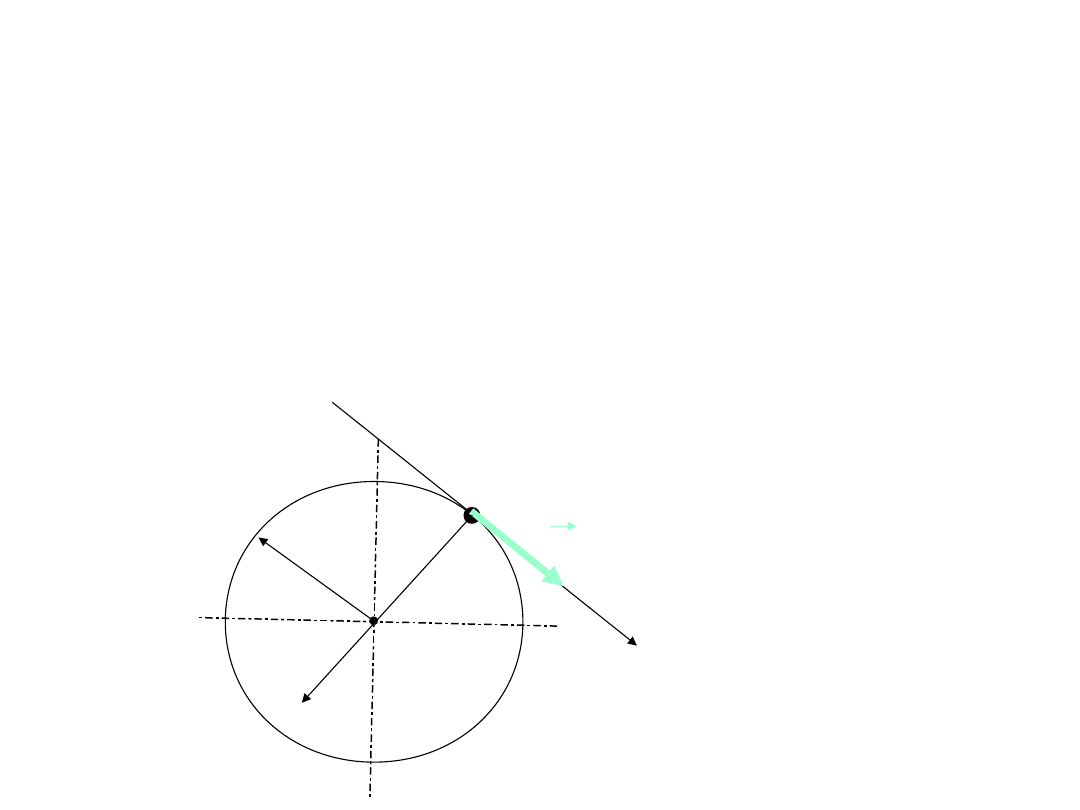
Tróścian
Freneta
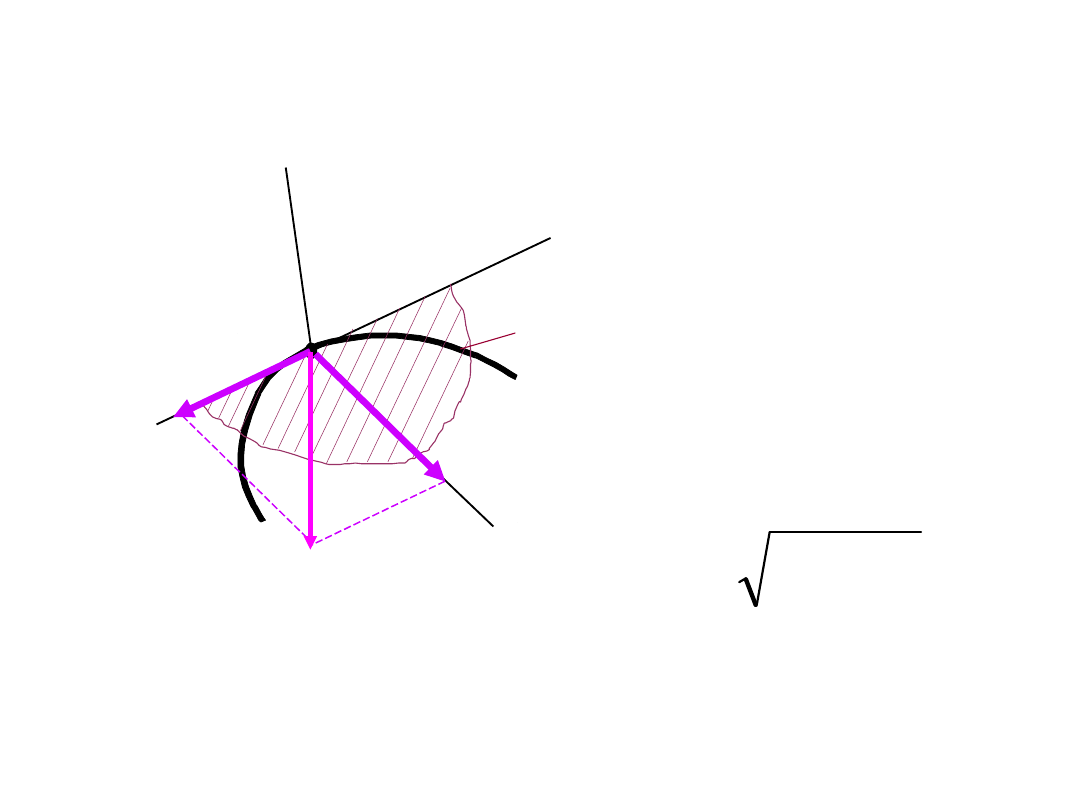
Trójścian Freneta
A n b – układ naturalny
, n, b - zależą od czasu.
Wektory i n wyznaczają
płaszczyznę
ściśle styczną do toru -
(b)
()
(n)
O
y
z
x
)
s
(
r
A
tor
b
n
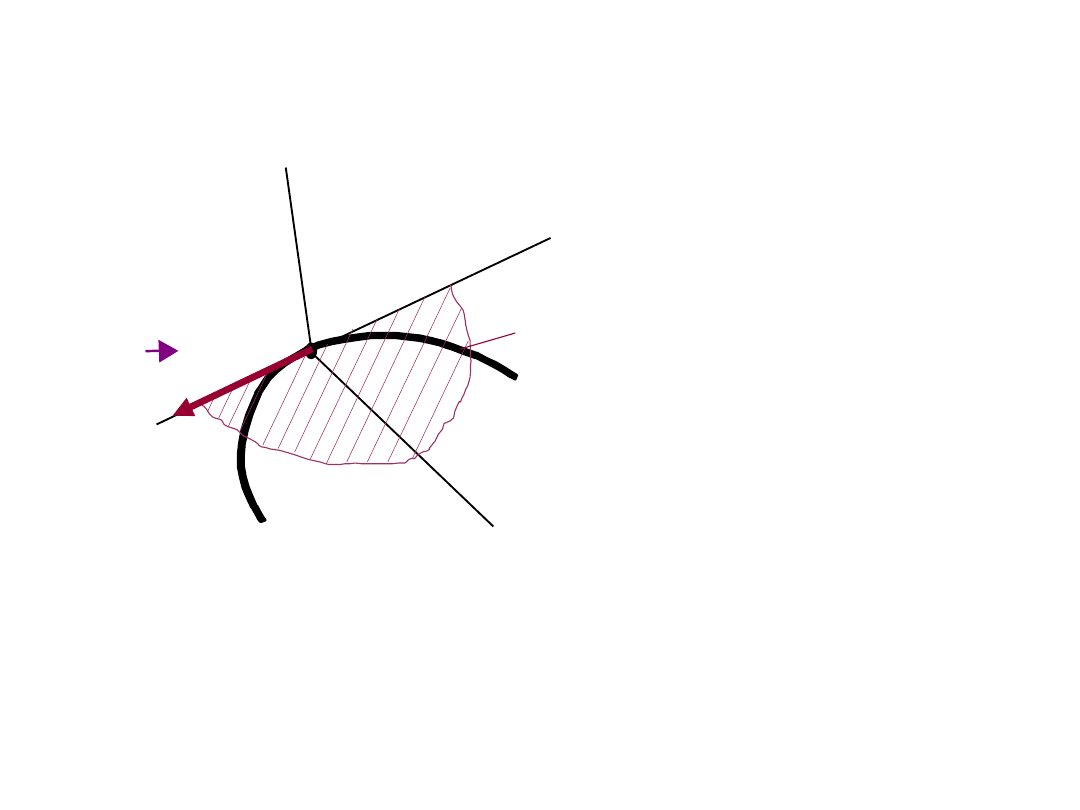
v
;
ds
r
d
;
dt
ds
v
v
ds
r
d
v
dt
ds
ds
r
d
dt
)
s
(
r
d
v
Predkość w ukł.
Freneta 1
Prędkość punktu w układzie
naturalnym
,
1
1
1
n
i
b
,
n
b
,
n
,
Prędkość w ukł. Freneta 2
(n)
A
(b)
()
V

normalne;
enie
przyspiesz
styczne;
enie
przyspiesz
n
v
a
dt
dv
a
dt
ds
ds
d
v
dt
dv
)
v
(
dt
d
dt
v
d
a
2
n
Przyspieszenie punktu w układzie naturalnym
-
promień krzywizny toru w punkcie A
Przysp. w ukł.
Freneta 1
2
2
2
2
)
s
(
v
a
;
s
v
a
;
a
a
|
a
|
a
n
n
Moduł i współrzędne wektora przyspieszenia:
Przysp. w ukł. Freneta
2
(n)
A
(b)
()
Przysp. w ukł.
Freneta 3
a
n
a
2
n
2
b
n
n
a
a
a
(zawsze),
0
a
,
n
a
a
,
a
a
,
a
a

Przykład
y
1.4 Przykłady
1.
Punkt materialny A porusza się zgodnie z
równaniami ruchu: x(t)=bsin(t), y(t)=c
cos(t).
Wyznacz równanie toru punktu, jego prędkość i
przyspieszenie w dowolnej chwili czasu t. Wyznacz
przyspieszenie styczne i normalne tego punktu.
Układ naturalny jest na ogół stosowany do badania
krzywoliniowego ruchu punktu.
Przykład
1/1
Rozwiązanie:
Dokonajmy przekształcenia:
)
t
cos(
c
y
),
t
sin(
b
x
i podnieśmy obustronnie równania do kwadratu:
)
t
(
cos
c
y
),
t
(
sin
b
x
2
2
2
2
2
2
Przykład
1/2
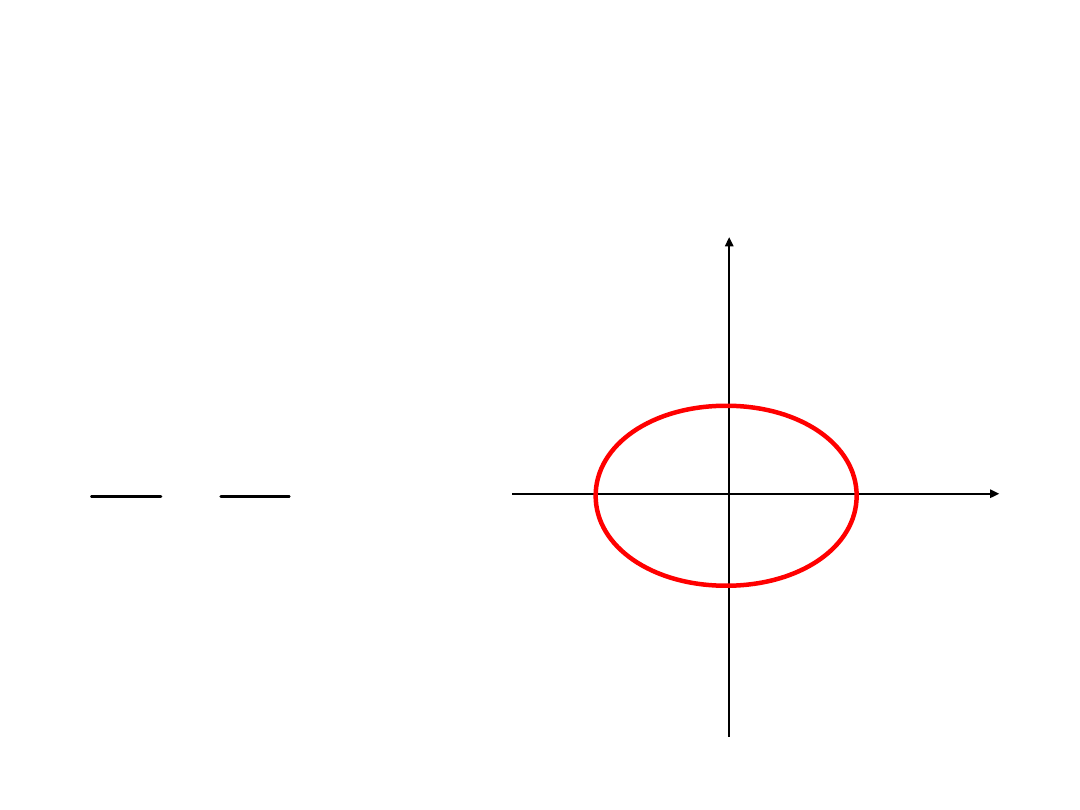
Po dodaniu stronami mamy równanie
toru w postaci elipsy:
1
c
y
b
x
2
2
2
2
O
x
y
c
-c
-b
b
Przykład
1/3
Prędkość i przyspieszenie
punktu:
)]
t
(
y
),
t
(
x
[
dt
r
d
)
t
(
r
v
)
t
sin(
c
)
t
(
y
)
t
cos(
b
)
t
(
x
)]
t
(
y
),
t
(
x
[
dt
r
d
)
t
(
r
v
a
2
2
)
t
cos(
c
)
t
(
y
)
t
sin(
b
)
t
(
x
2
2
Przykład
1/4
Przyspieszenie styczne i
normalne:
)
t
(
y
)
t
(
x
v
2
2
)
t
(
sin
c
)
t
(
cos
b
v
2
2
2
2
)
t
(
sin
c
)
t
(
cos
b
2
)
t
2
sin(
)
b
c
(
dt
dv
a
2
2
2
2
2
2
2
2
2
n
a
a
a
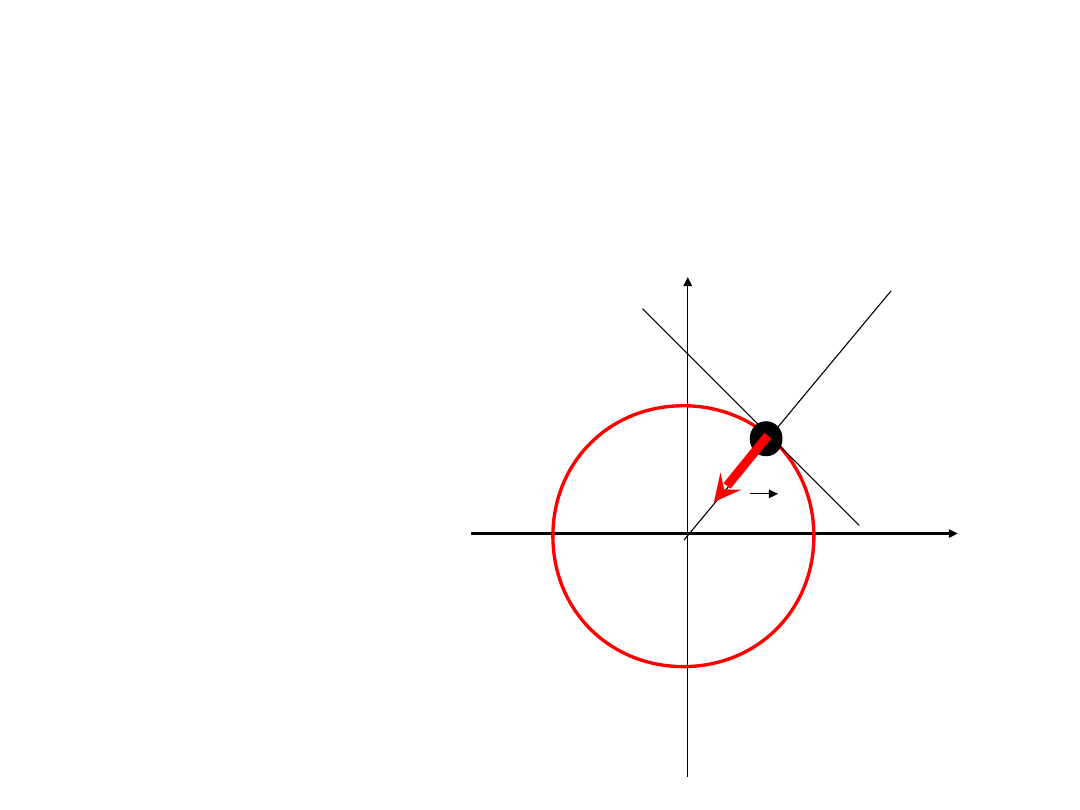
Przykład
1/5
Ruch po okręgu o promieniu r z prędkością
v=const.
Dla okręgu mamy:
b=c=r,
r
a
=0
a
n
=
2
r =
v
2
/r
n
O
x
y
a
n
Przykład
2/1
Przykład 2.
Punkt materialny A zaczął poruszać się
po okręgu o promieniu
r =0.1
[m] w ten sposób, że jego
przyspieszenie styczne
a
jest stale równe
2
[m/s
2
] . Po
jakim czasie jego przyspieszenie normalne będzie
równe stycznemu?
A
r
a
n
Przykład
2/2
Rozwiązanie:
t
a
)
t
(
v
dt
a
v
0
C
0
v
;
C
t
a
)
t
(
v
dt
a
v
dt
a
dv
dt
dv
a
1
0
t
1
]
s
[
20
1
t
;
s
m
2
t
40
a
a
t
40
1
.
0
t
4
a
r
v
a
2
2
n
2
2
n
2
n

Przykład
3/1
Przykład 3.
Obliczyć promień krzywizny toru środka kulki
w początku ruchu, jeżeli równania ruchu mają
postać: x=2t, y=t
2
; przy czym t [s], x i y [m].
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
Wyszukiwarka
Podobne podstrony:
chap01, p01 027
chap01, p01 036
chap01, p01 023
chap01, p01 026
chap01, p01 020
chap01, p01 014
chap01, p01 044
chap01, p01 002
P01 Ped Trauma Assessment
chap01, p01 029
chap01, p01 011
chap01, p01 030
chap01, p01 043
chap01, p01 007
chap01, p01 015
chap01, p01 032
więcej podobnych podstron