ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Technologia i organizacja
robót budowlanych
„Klasyfikacja maszyn do robót ziemnych”
„Spycharki , zgarniarki i równiarki,
ich charakterystyka, sposoby pracy i
wykorzystania”
prof. dr hab.
inż.
Włodzimierz
Martinek
dr inż. Paweł Nowak
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Klasyfikacja maszyn i urządzeń do robót
ziemnych
1. do odspajania gruntu i przesuwania go po terenie
SPYCHARKI, RÓWNIARKI
2. do odspajania gruntu i przewożenia po terenie
ZGARNIARKI
3. do odspajania gruntu i załadunku lub układania
na odkładzie
KOPARKI
4. do załadunku gruntu
ŁADOWARKI
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
5. do spulchniania gruntu
ZRYWARKI
(spycharki
z
osprzętem
zrywakowym)
6. do zagęszczania gruntu
UBIJARKI,
WIBRATORY,
WALCE,
ZAGĘSZCZARKI
7. sprzęt transportowy
SAMOCHODY
SAMOWYŁADOWCZE
(WYWROTKI)
8. urządzenia pomiarowe
9. maszyny uniwersalne, np. koparko - spycharki
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
SPYCHARKI
Zastosowanie:
do
prac
przygotowawczych
(zdejmowanie
humusu),
wykonywania
płytkich
wykopów i nasypów, prace porządkowe, karczowanie
drzew

ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Klasyfikacja
spycharek
ze
względu na:
moc silnika;
- małe - do 60kW
- średnie - od 60kW do
150kW
- duże - powyżej 150 kW
rodzaj ciągnika;
- kołowe
- gąsienicowe
sposób
sterowania
lemieszem
- mechaniczne
- hydrauliczne
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
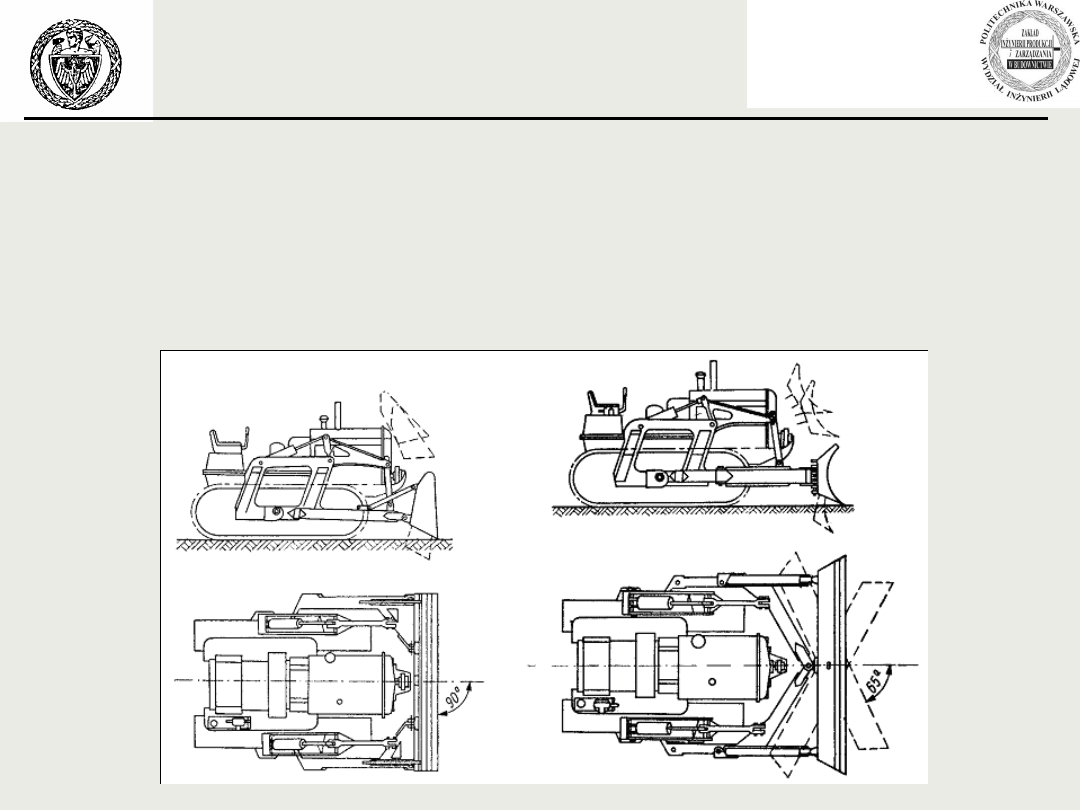
ustawienie lemiesza;
- czołowe
- ukośne
- uniwersalne
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
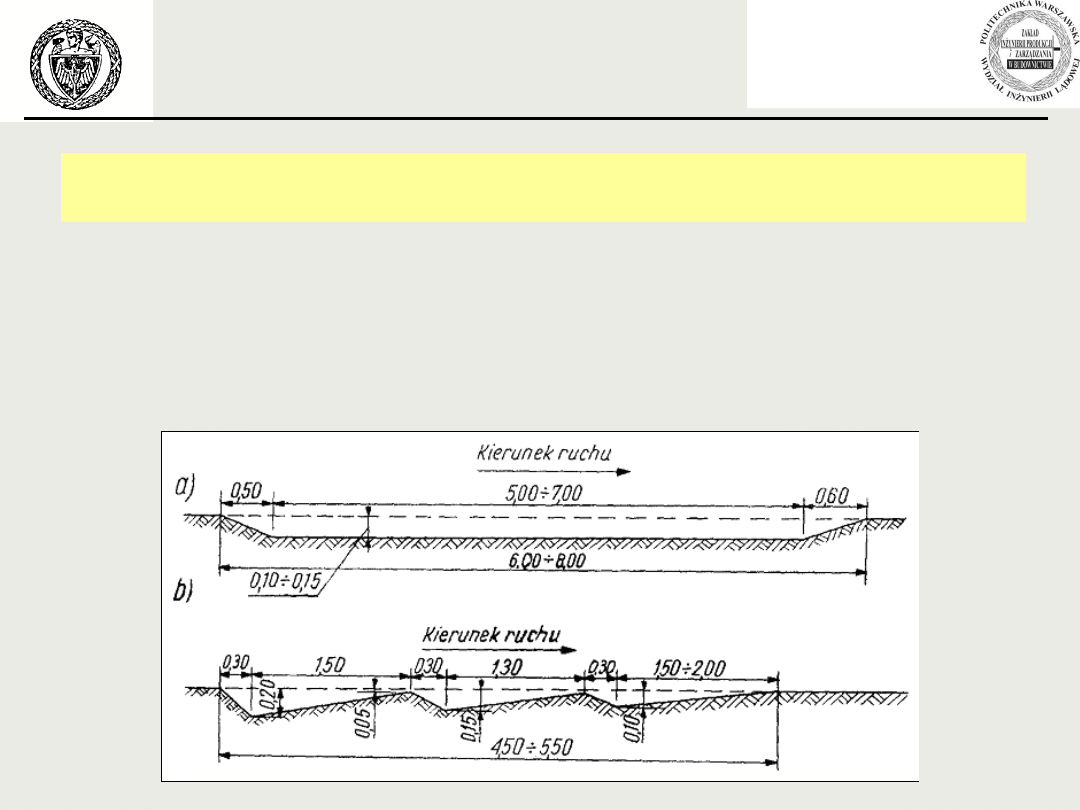
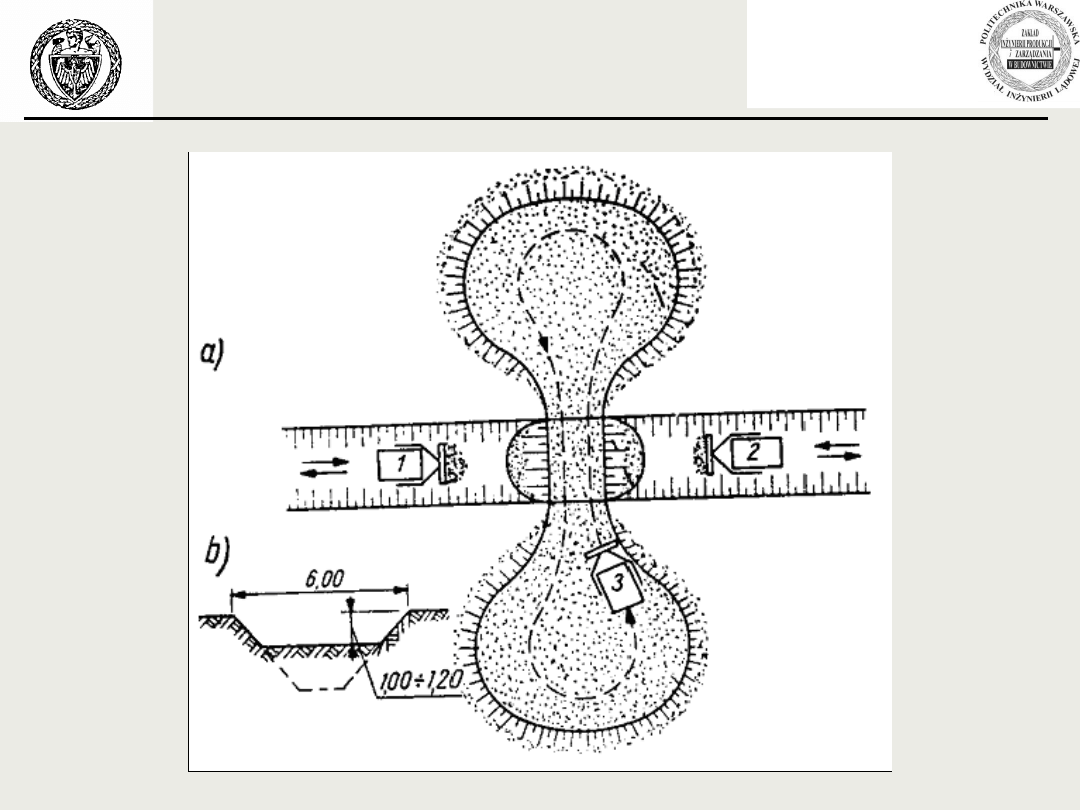
Cykl pracy spycharki
1. napełnianie lemiesza
2. przemieszczanie urobku (opłacalne do 100m):
sposób prosty (a) i sposób grzebieniowy (b)
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
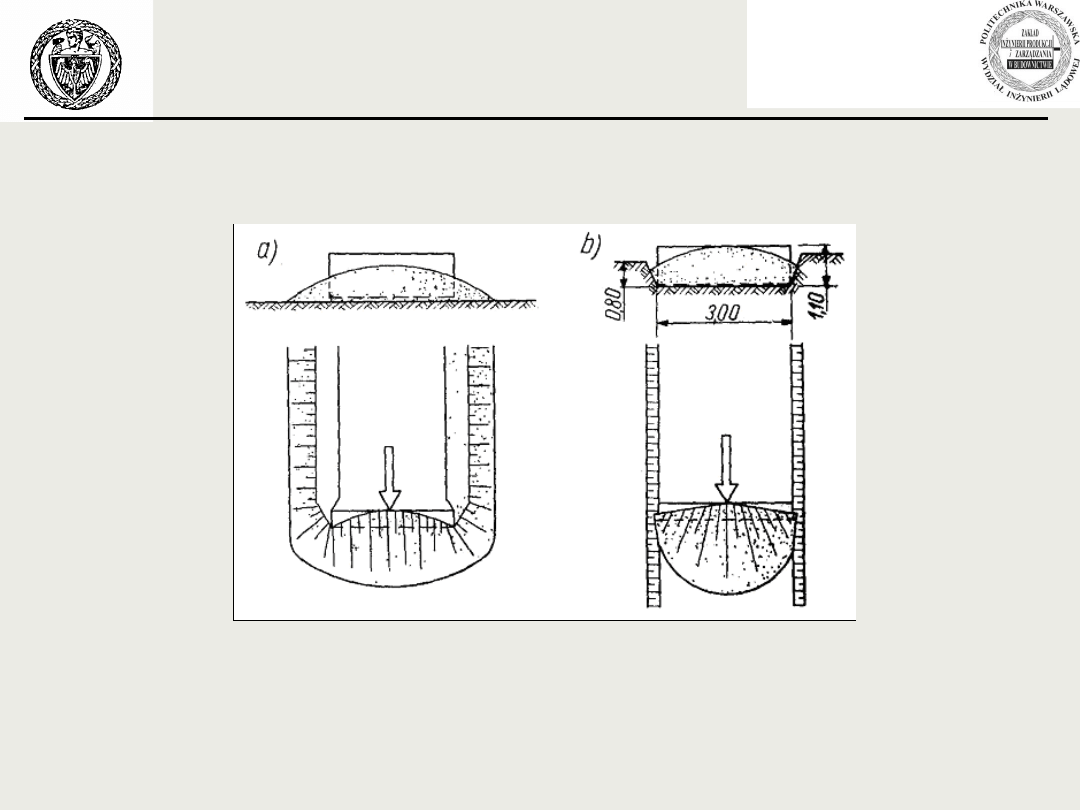
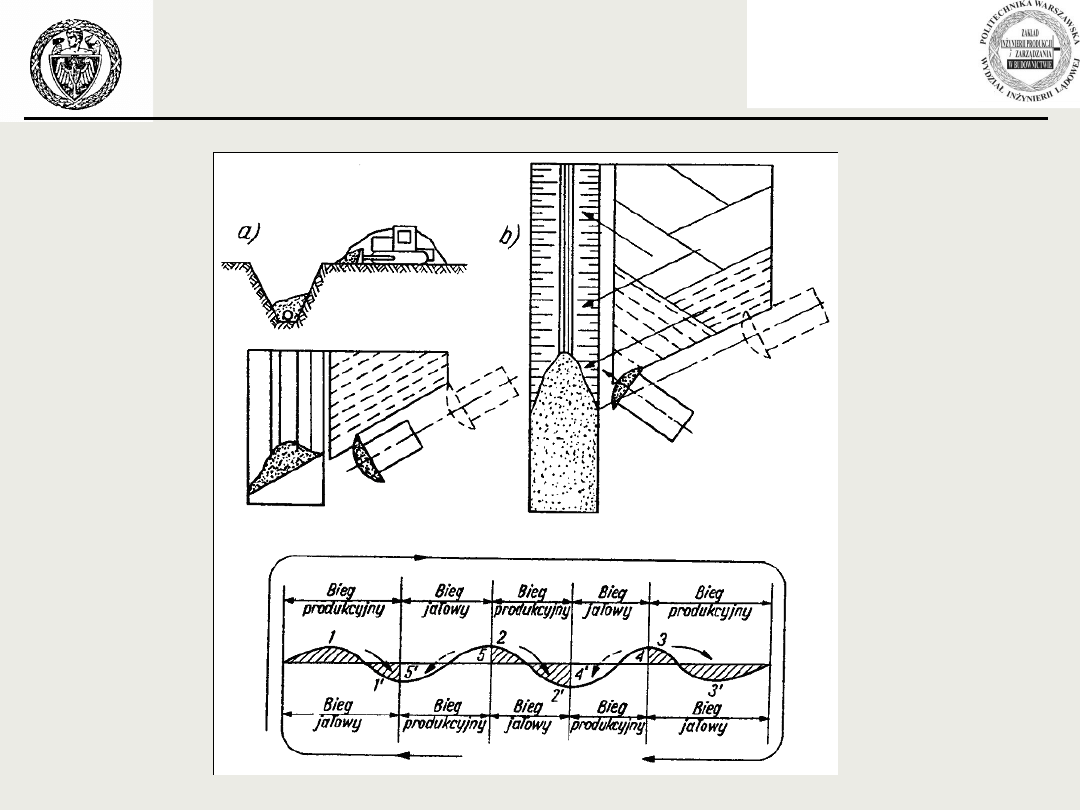
sposób terenowy (a) i łożyskowy (b)
3. wyładunek
4. powrót
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
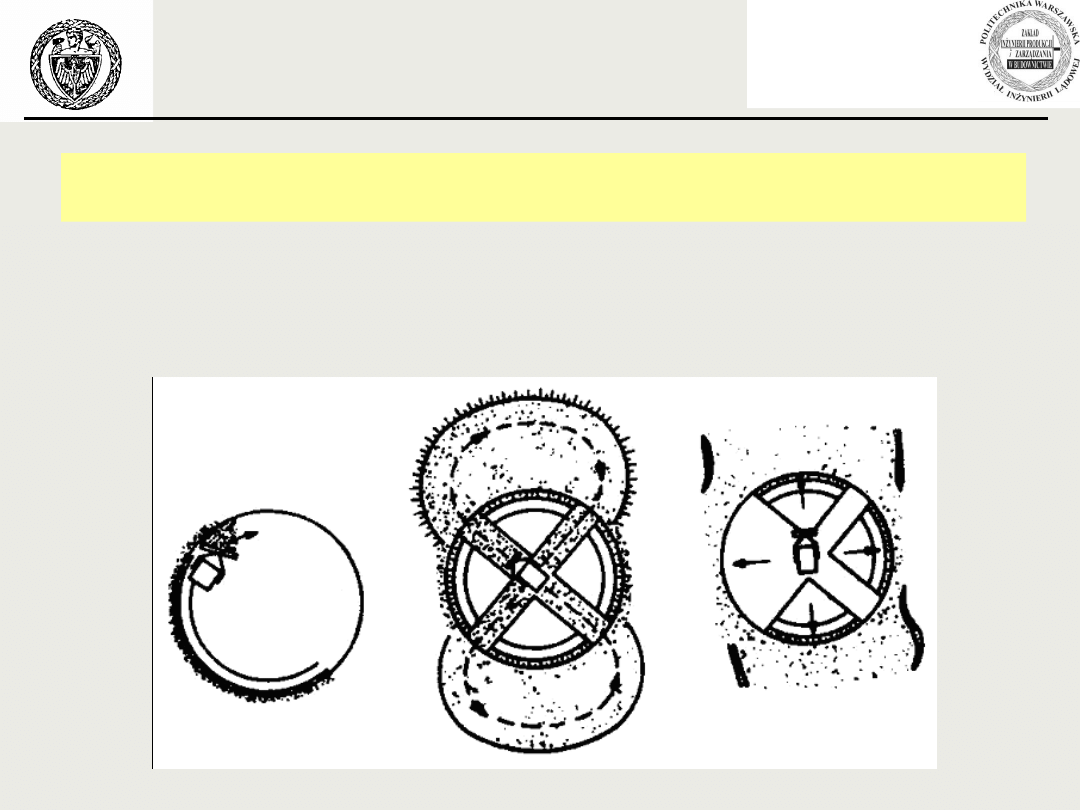
Sposób pracy spycharki
eliptyczny
ósemkowy
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
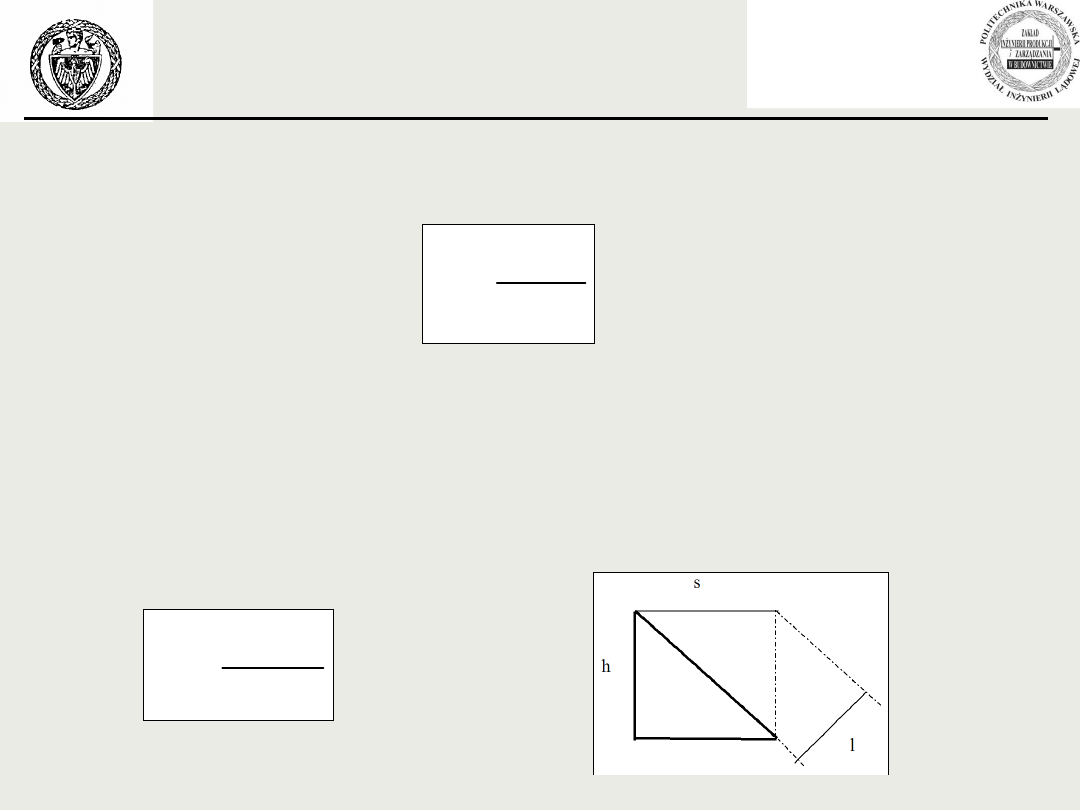
Objętość przemieszczanego gruntu:
gdzie:
l - długość lemiesza
h - wysokość lemiesza
ψ - kąt stoku naturalnego
μ- współczynnik utraty urobku (zależny od odległości)
lub sposób uproszczony:
tg
lh
Q
2
2
2
l
s
h
Q
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Cykl pracy maszyny:
, [min.]
gdzie:
l
s
– odległość skrawania, m
v
s
– prędkość skrawania (I bieg), km/h
v
p
– prędkość przemieszczania z urobkiem (II bieg), km/h
v
po
– prędkość powrotna (III bieg), km/h
t
s
– czas potrzebny dla dokonania skrętu (zawrócenia) spycharki,
min (t
s
= 0,5 min);
gdy odległość jazdy powrotnej jest mniejsza niż 50 m,
praktyczniej jest wracać
na tylnym biegu nie zakręcając
t
p
– czas potrzebny na przełączenie biegu (przyjmuje się t
p
= 5 s =
0,08 min)
t
o
– czas potrzebny na opuszczenie lemiesza (t
o
= 5 s = 0,08 min)
o
p
s
po
p
s
p
p
s
s
t
t
t
v
l
l
v
l
v
l
t
2
2
)
(
1000
60
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Wydajność maszyny (eksploatacyjna):
gdzie:
t – czas cyklu
Q – pojemność lemiesza
S
n
– wsp. napełnienia
S
s
– wsp. spoistości gruntu (z tablic)
S
w
– wsp. wykorzystania czasu
w
s
n
E
S
S
QS
t
W
60
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
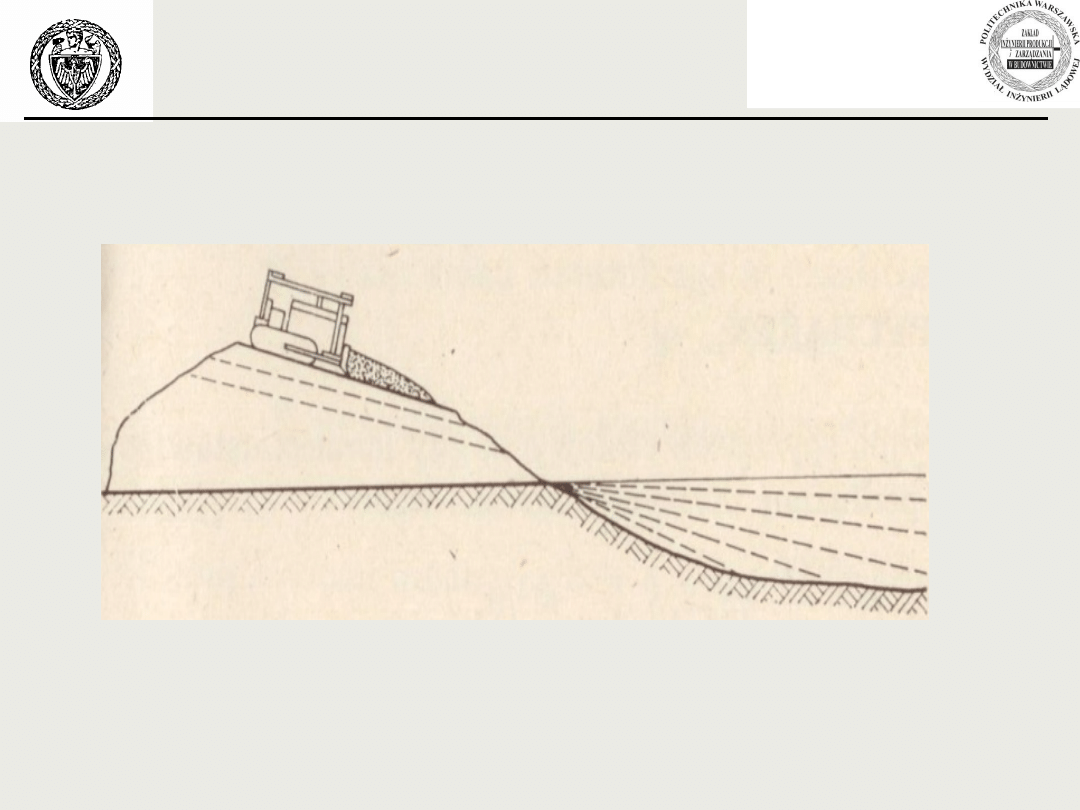
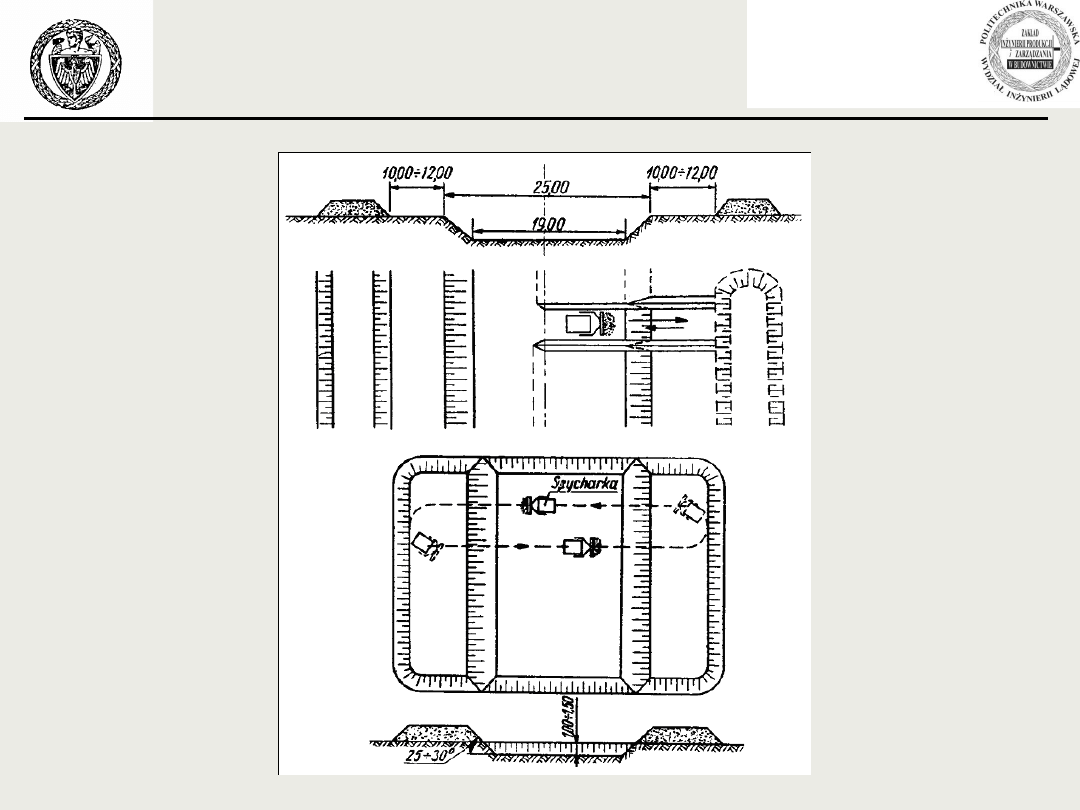
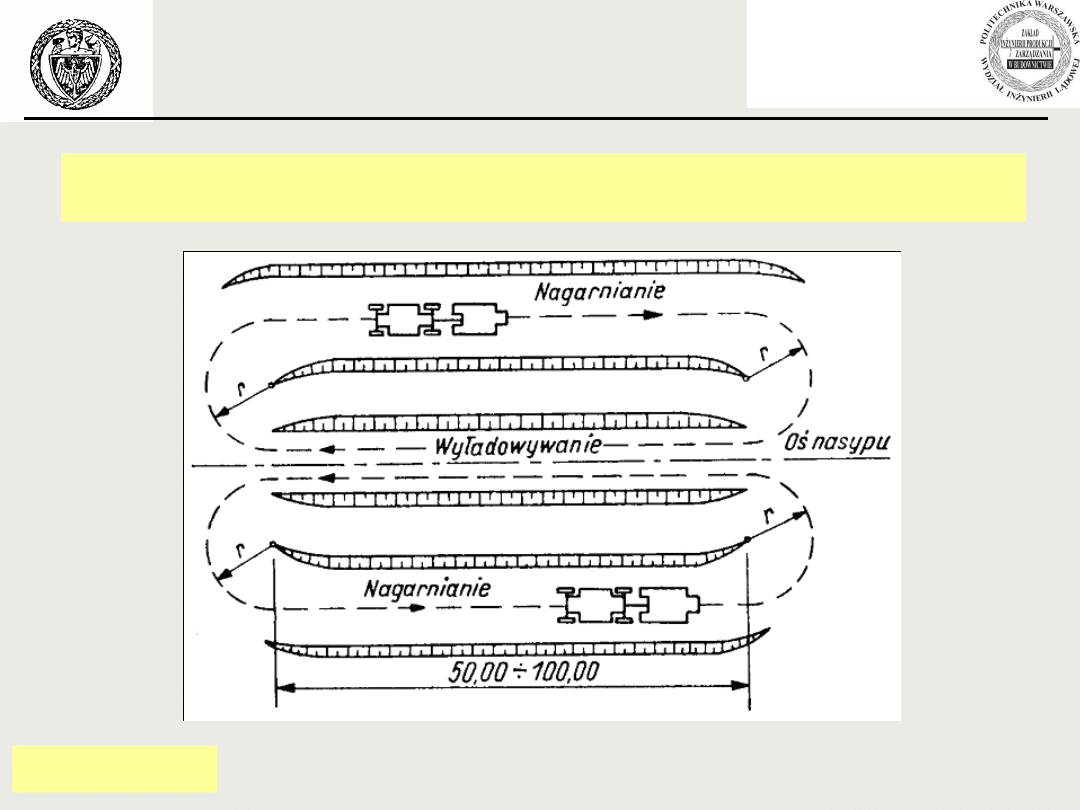
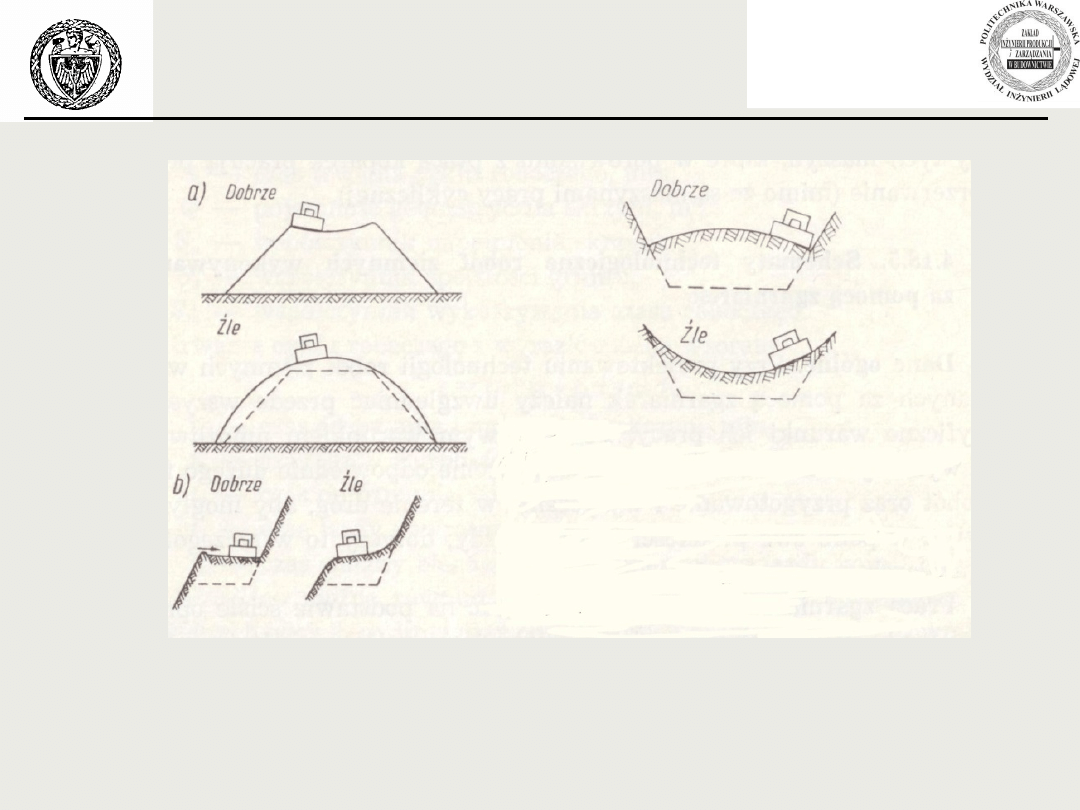
Wykonywanie nasypu spycharką
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
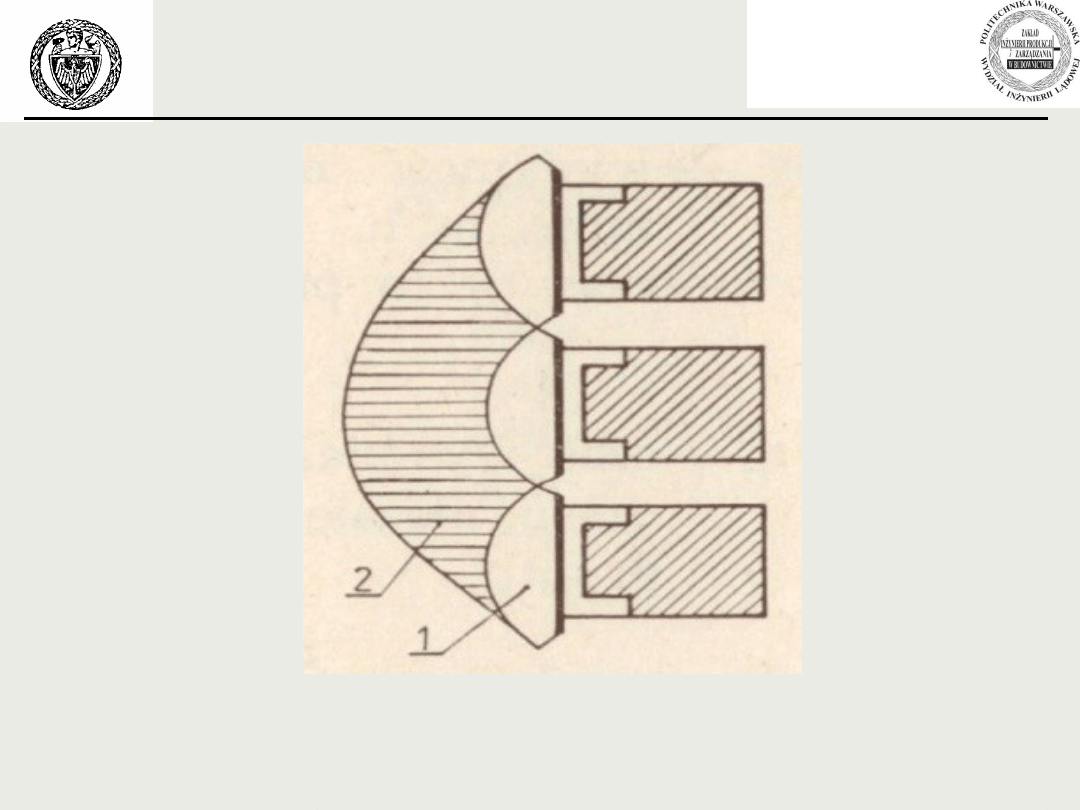
Schemat zespołowej pracy trzech spycharek 1- objętość
przemieszczanego
urobku przy pracy indywidualnej, 2- jw. przy pracy trzech
spych
arek
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Wielkość robót na
jednym
placu budowy
[m
3
]
Intensywność robót
[m
3
/zm.]
Ekonomiczne
uzasadnienie
wielkości spycharek
[kW]
Do 600
nie określona
40 – 48
600 – 1 500
do 250
250 – 430
powyżej 430
40 – 48
55
73
1 500 – 60 000
do 400
400 – 800
powyżej 800
48 – 55
73
103 – 125
Powyżej 60 000
do 400
400 – 800
800 – 1 200
powyżej 1200
48 – 55
73
103 – 125
184 – 220
Tab. Graniczne wielkości robót ziemnych dla spycharek
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
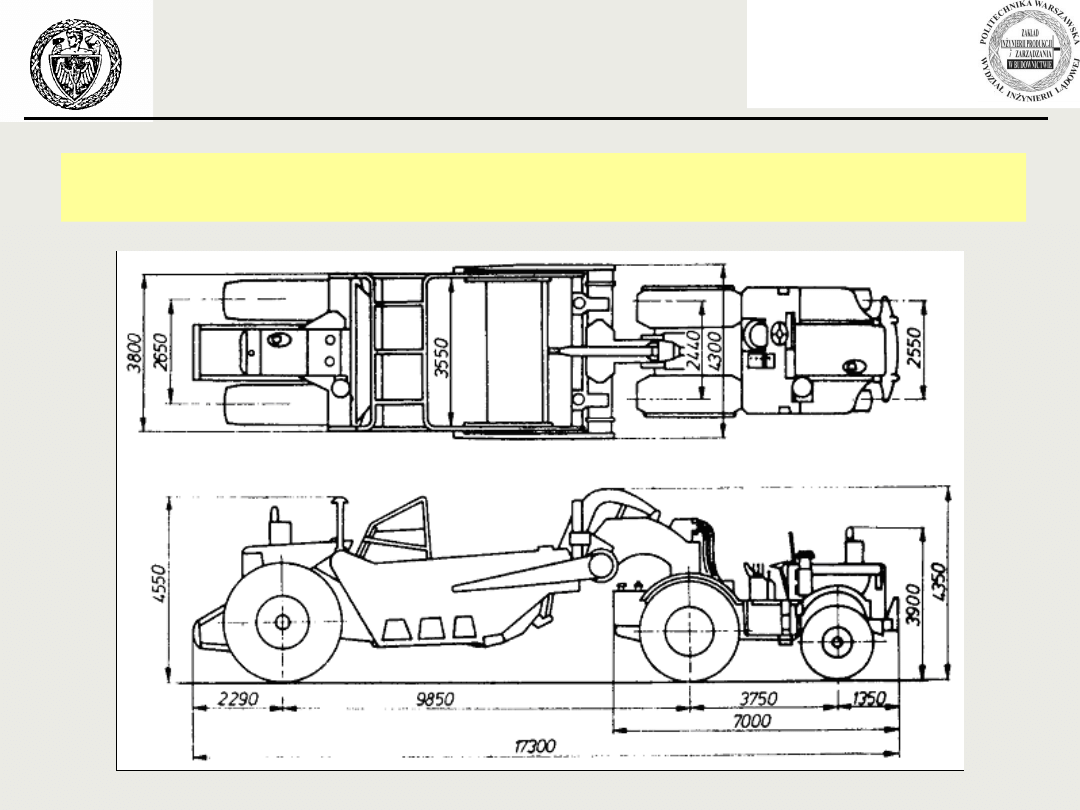
Zgarniarki
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Klasyfikacja zgarniarek:
pojemność skrzyni;
- małe - do 5 m
3
-
średnie - 6 - 15 m
3
-
duże - pow. 15 m
3
układ jezdny;
- samobieżne - transport do 5000 m
- przyczepne - 1000 - 2000 m
sposób napełniania;
- naturalny - strugi gruntu
- ze wspomaganiem
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
sposób opróżnienia;
- grawitacyjny
- wymuszony (ruchoma tylna ścianka)
sposób sterowania skrzynią;
- mechaniczny
- hydrauliczny
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Cykl pracy zgarniarki
skrawanie (sposób płaski i
grzebieniowy)
transport urobku
wyładunek
powrót
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Wydajność eksploatacyjna zgarniarek W
z
oblicza się
ze wzoru:
,
m
3
/h
gdzie:
t – czas trwania cyklu roboczego, min
Q – pojemność geometryczna skrzyni, m
3
S
n
– współczynnik napełnienia skrzyni
S
s
– współczynnik spoistości gruntu
S
w
– współczynnik wykorzystania czasu roboczego
w
s
n
z
S
S
QS
t
W
60
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Czas trwania cyklu roboczego t wyrazić można
wzorem:
gdzie:
t
1
– czas odspajania i napełniania skrzyni, min
t
2
– czas jazdy z urobkiem, min
t
3
– czas opróżniania skrzyni, min
t
4
– czas jazdy powrotnej, min
t
5
– czas zmiany biegów i zmiany kierunków jazdy, min
5
4
3
2
1
t
t
t
t
t
t
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Powyższy wzór można również przedstawić w zależności od długości
poszczególnych odcinków drogi oraz odpowiednich prędkości jazdy z
uwzględnieniem czasu niezbędnego na zmiany biegów i kierunków
jazdy, wówczas otrzymamy:
,
min
gdzie:
l
1
– długość odcinka drogi, na którym skrawany jest grunt i napełnia się
urobkiem skrzynię, m
l
2
– długość odcinka drogi przebywanej z urobkiem, m
l
3
– długość odcinka drogi, na którym opróżnia się skrzynię z urobkiem, m
l
4
– długość odcinka drogi jazdy powrotnej, m
v
1
– prędkość jazdy zgarniarki przy napełnianiu skrzyni, km/h
v
2
– prędkość jazdy zgarniarki przy przewożeniu urobku, km/h
v
3
– prędkość jazdy zgarniarki przy opróżnianiu skrzyni, km/h
v
4
– prędkość jazdy zgarniarki przy jeździe powrotnej, km/h
t
b
– czas niezbędny na dokonanie zmiany biegu, h
t
k
– czas zmiany kierunku jazdy [h], przy czym 4t
b
+2t
k
wynosi ok. 1 min.
5
4
3
2
1
t
t
t
t
t
t
k
b
t
t
v
l
v
l
v
l
v
l
t
2
4
)
(
1000
60
4
4
3
3
2
2
1
1
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Schemat pracy zgarniarek
Eliptyczny
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Ósemkowy
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Spiralny
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
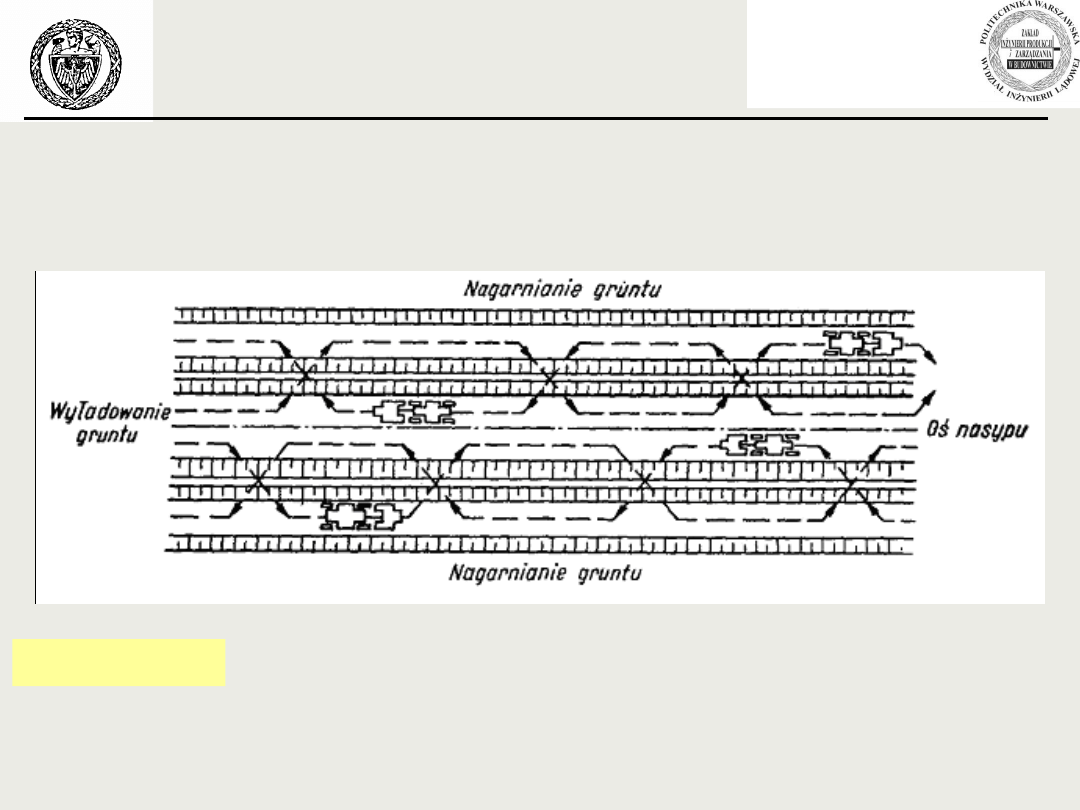
Zygzakowy
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
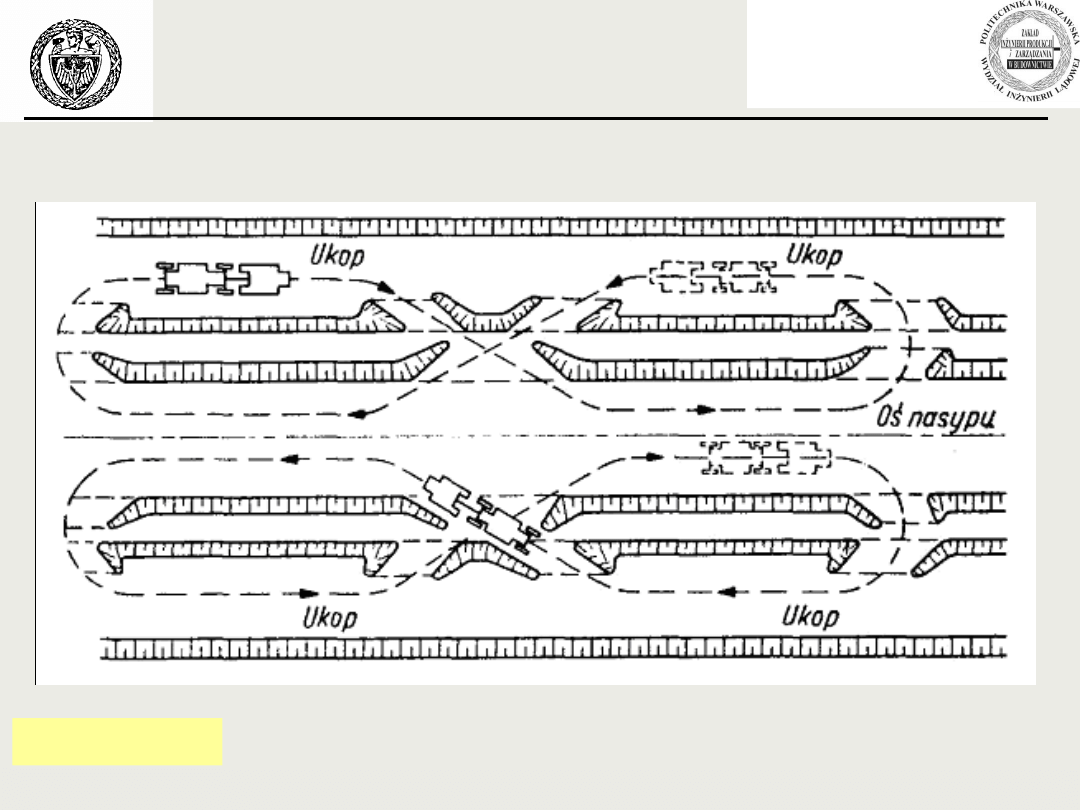
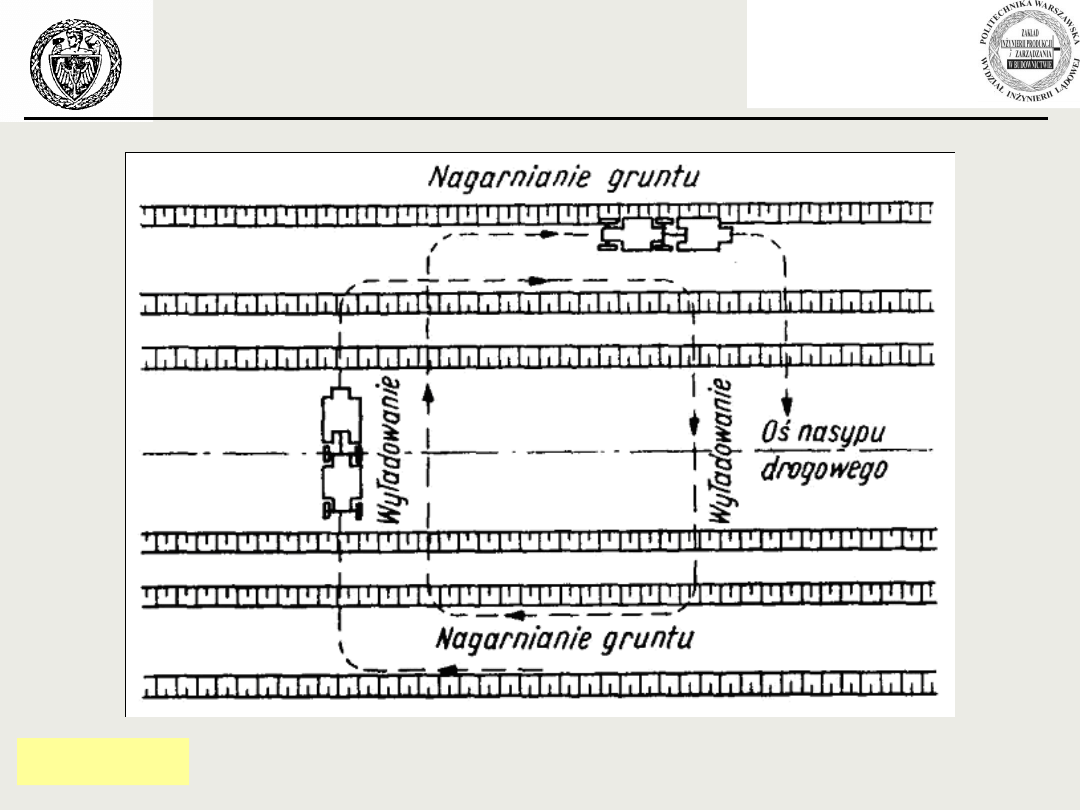
Schemat pracy zgarniarek przy wykonywaniu budowli
liniowych:
a) nasypów b) wykopów na płaszczyźnie, c) wykopów na
stoku
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Równiarki
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
3
1
2
4
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
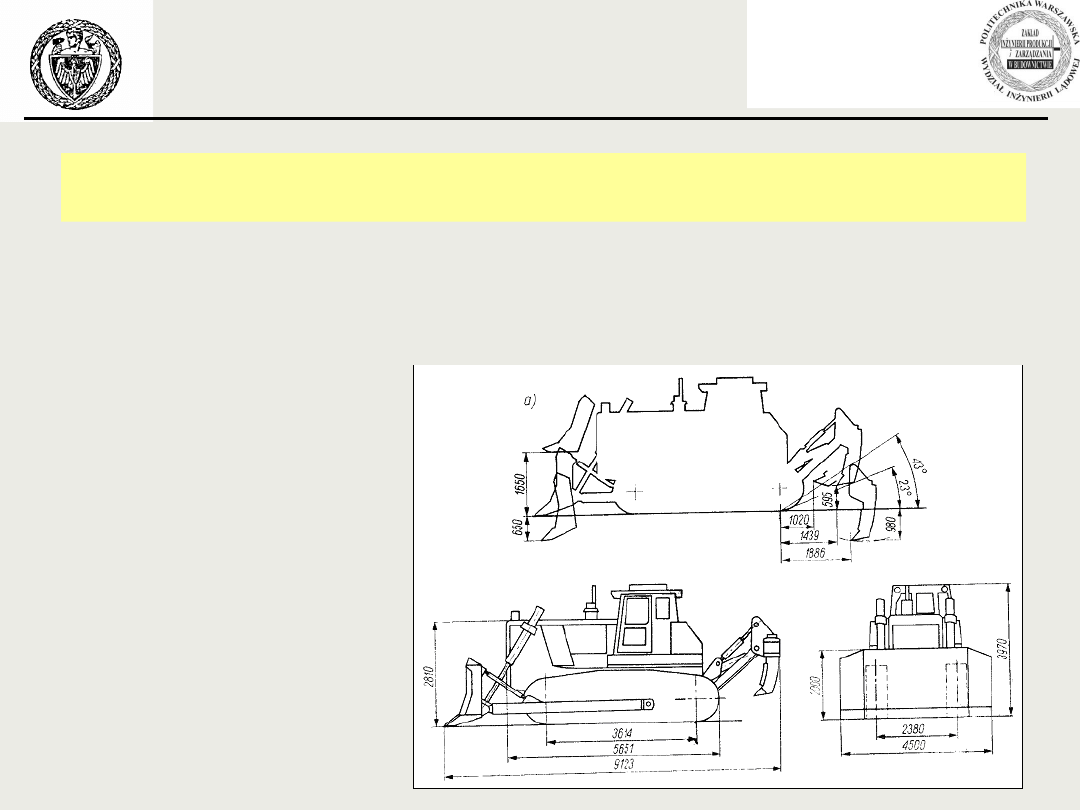
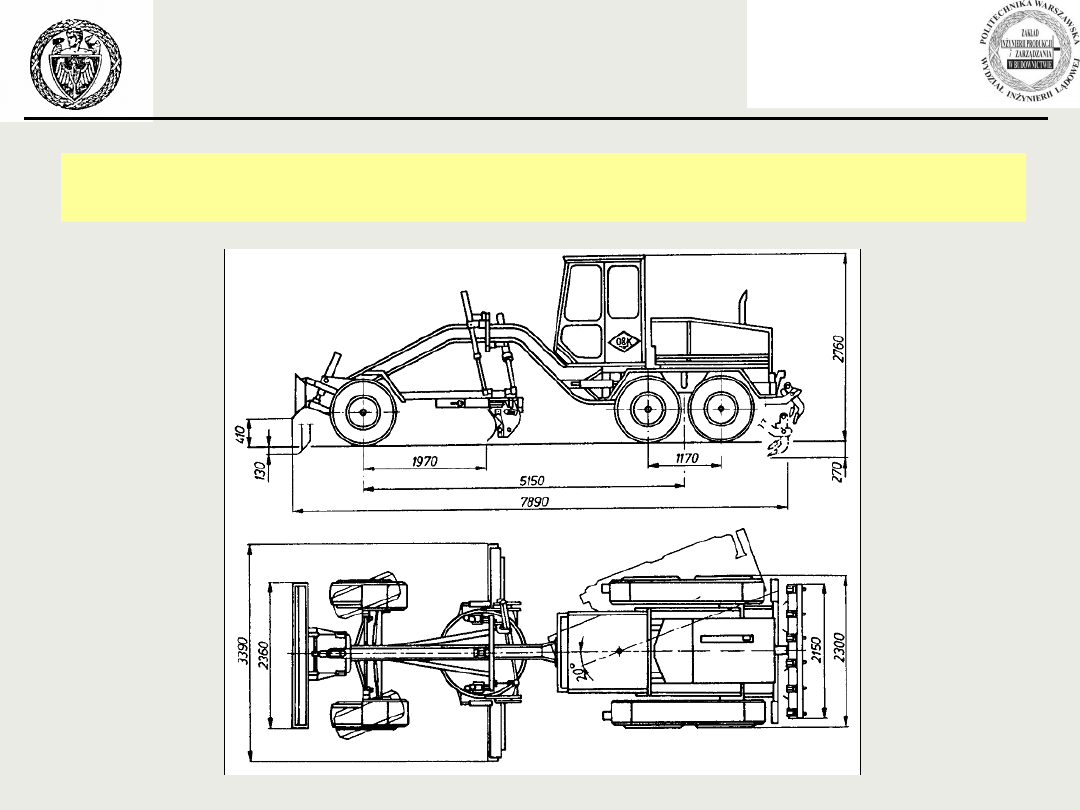
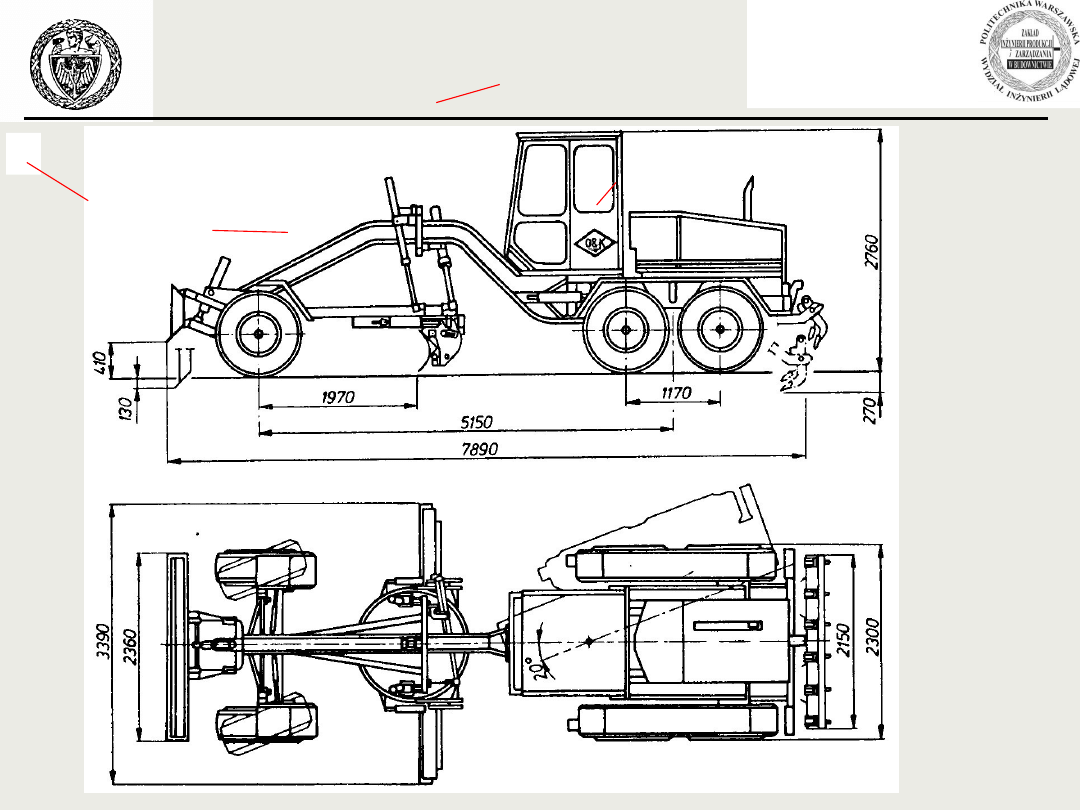
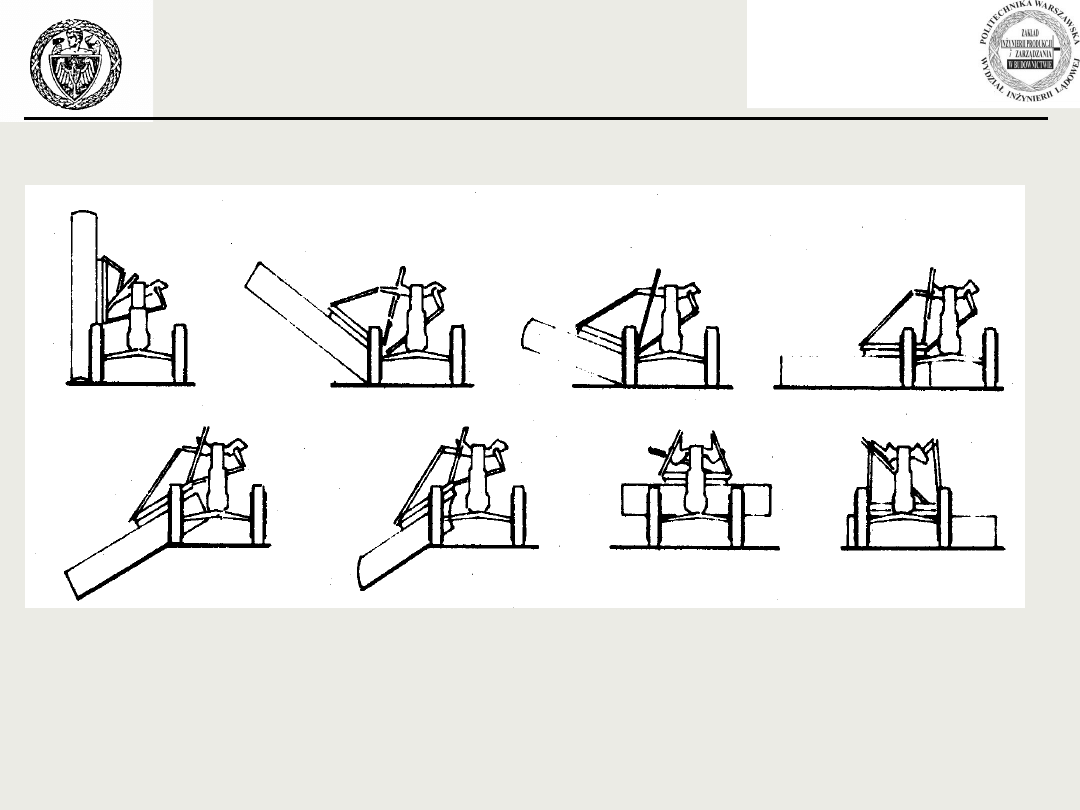
Równiarka: a)widok z boku, b)widok z góry,
c)schematyczne ustawienia robocze lemiesza głównego;
1–kabina operatora, 2–lemiesz główny, 3–lemiesz pomocniczy, 4-zrywak
.

ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011

ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
ZAKŁAD INŻYNIERII PRODUKCJI I ZARZĄDZANIA W BUDOWNICTWIE
WYDZIAŁ INŻYNIERII LĄDOWEJ POLITECHNIKA WARSZAWSKA
WYKŁADY TECHNOLOGIA ROBÓT BUDOWLANYCH
RA 2010/2011
Wydajność równiarek przy profilowaniu i wyrównywaniu dużych powierzchni
terenu i układaniu warstw gruntu lub innych materiałów, oblicza się według
wzoru:
p rz ej
ś
r z
p a s
ó w
n ych
p o s
z cz eg ó
l
p
r z yk
ry
ci a
d o
s i
ę
o d
n o s
z
ą d n
o
k
w s
p ó
łs
p ó
łc
-
0 , 5
w art o
ś w
h w
z o rach ,
p o p
r z ed n i
c
j a k
w
Sw
i
S
s
s )
,
3 0
(
o k
o
ło
j a z
d y
k i eru n k u
z m
i a n y
cz as
-
t
z k
( k
m /h )
,
r ó
w n i ar k
i
j a z
d y
p
r
ęrę d k
o
-
v
p as i e,
j ed n ym
p o
r ó
w n i ark i
p r z
e j
ś r
l i cz b a
-
n
(
s t o
p n i )
,
p
l a n i
e
w
l em i es z a
u s t aw i en i a
k
ą ąt
-
?
(
m )
,
ró w n
i a rk i
l em i es z
a
d
łł
u g o ś
-
b
(
m )
,
o d ci n k
a
n eg o
w yró w n yw
a
d
łłu g o
ś
-
L
( m
2 )
,
r o
b ó t
h
w
y
k
o n
a n yc
i a
p o
w i er z ch
n
j a k
o
w
o
b l i cz an a
yj n a,
ek s p
l o at ac
w
yd a j
n o
ś y
-
WE
:
g d z i e
( 2
. 1 5 )
( m 2
/h )
=
E
W
:
w z o
r u
w
e d
łw e
s i
ę
o b
l i cz a
,
m at eri a
łat
i n n ych
l u b
g ru n t
u
w ar s
t w
u k
łk
ła d an i
i
t er en u
i
p
o w i
e rz ch n
d u
ż u ż yc
n
i u
w
y
ró
w n yw a
i
i u
p ro fil o
w an
p rz y
ró w n
i a re k
Wyd aj n o
ś
y
)
6
,
3
(
)
5
,
0
s i n
(
3
6 0 0
n
t
v
L
S
S
b
L
z k
w
s
gdzie:
W
E
-wydajność eksploatacyjna, obliczana w jako powierzchnia wykonanych robót (m
2
),
L-długość wyrównywanego odcinka (m),
b-długość lemiesza równiarki (m), α- kąt ustawienia lemiesza w planie (stopni),
n- liczba przejść równiarki po jednym pasie, v-prędkość jazdy równiarki (km/h),
t
zk
-czas zmiany kierunku jazdy (około 30 s), S
s
i S
w
jak w poprzednich wzorach,
wartość 0,5-współczynik odnoszący się do przykrycia poszczególnych pasów przejść.
n
t
v
L
S
S
b
L
zk
w
s
)
6
,
3
(
)
5
,
0
sin
(
3600
W
E
=
(m
2
/h
)
=
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
Wyszukiwarka
Podobne podstrony:
Roboty ziemne rozkład klasa II maszyna
6 1 Roboty ziemne
3 Roboty ziemne wykonanie wykopów str 4
KNR 2 01 Budowle i roboty ziemne 1
,budownictwo ziemne,RODZAJE MASZYN
Roboty ziemne
slajdy TIOB W07 09 A roboty ziemne wstep, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika W
materialy-na-egzamin, studia, studia, roboty ziemne
Grunty i roboty ziemne - cz.1, Dlaczego przestrzega się przed budową na gruntach wysadzinowych, Dlac
Grunty i roboty ziemne - cz.1, Kiedy następuje odbiór robót ziemnych, Kiedy następuje odbiór robót z
42 06 Drogowe roboty ziemne
maszyny spycharki
prezentacja projekt 1 roboty ziemne część 3 (2)
roboty ziemne
Grunty i roboty ziemne - cz.1, Na co ma wpływ poziom wody gruntowej, Na co ma wpływ poziom wody grun
Grunty i roboty ziemne - cz.1, Jak budować na torfach, Jak budować na torfach
Grunty i roboty ziemne - cz.1, Kto może wytyczyć budynek w terenie, Kto może wytyczyć budynek w tere
Grunty i roboty ziemne - cz.1, Kto może wytyczyć budynek w terenie, Kto może wytyczyć budynek w tere
więcej podobnych podstron