Przykładowe wahadła - modelowanie
Elementy
Elementy
Mechatroniki
Mechatroniki
Wykład nr 3
Wykład nr 3
dr inż. Tomasz Trawiński
Politechnika Śląska
Politechnika Śląska
Wydział Elektryczny
Wydział Elektryczny
Katedra Mechatroniki
Katedra Mechatroniki
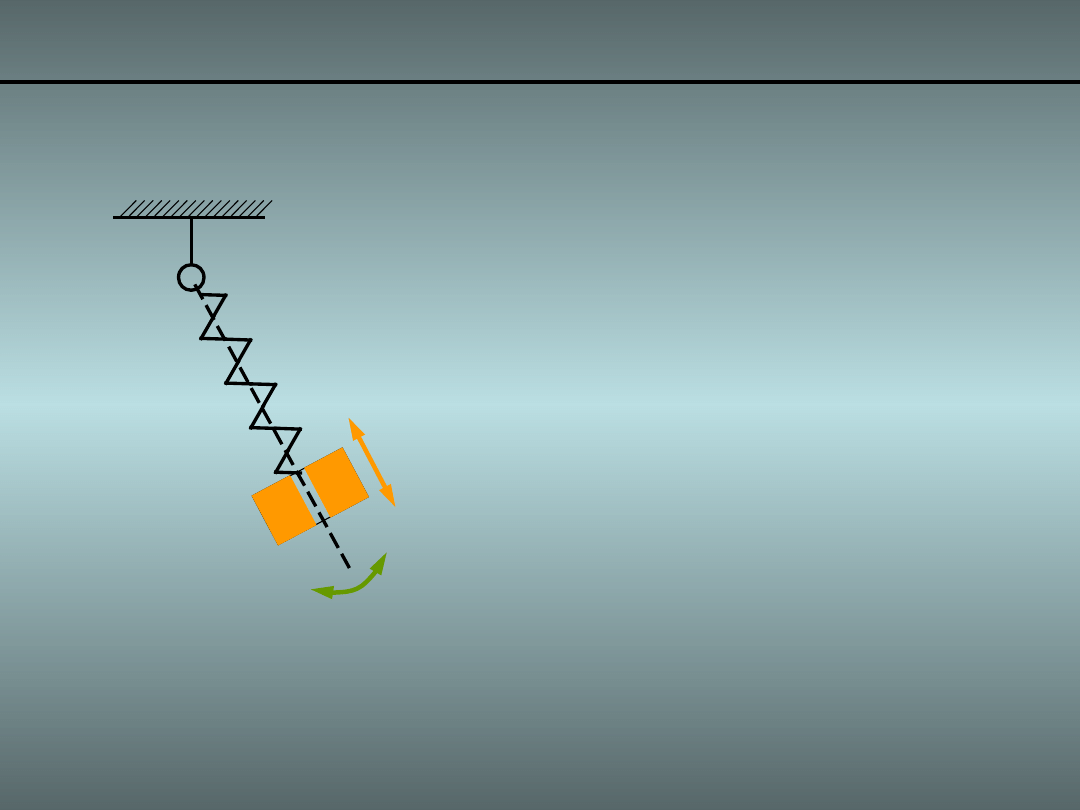
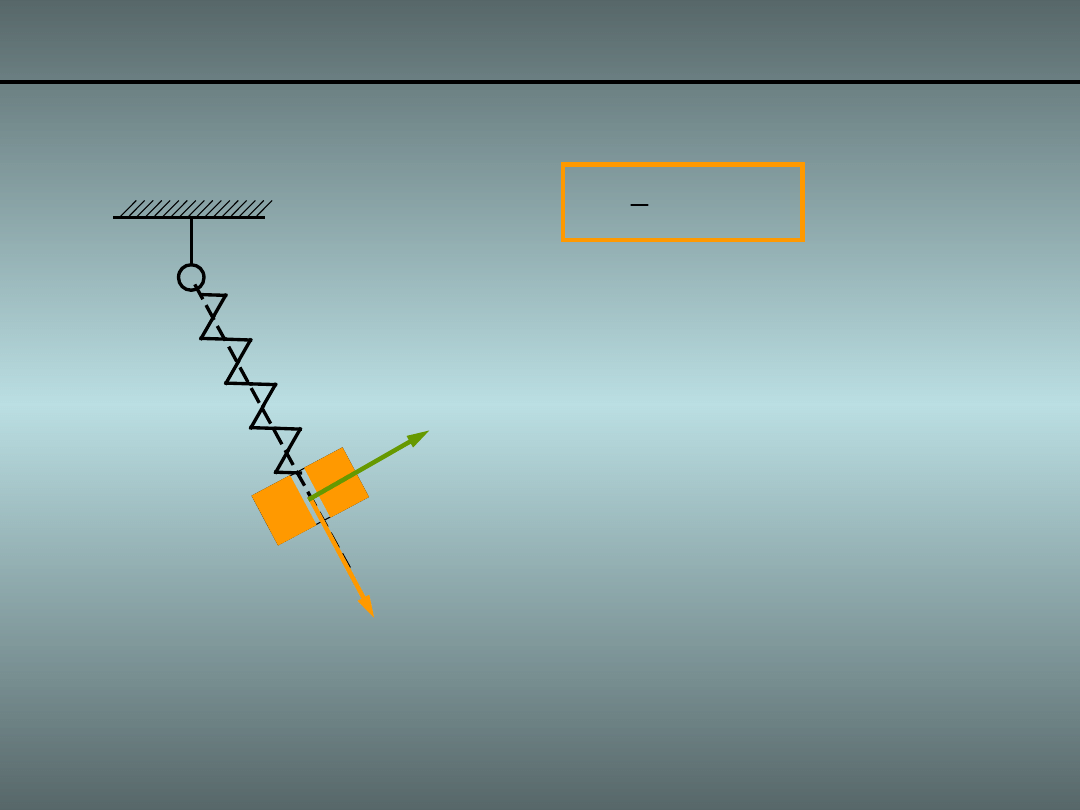
Przykład1. Wahadło z masą ślizgającą się 1/
Przykład1. Wahadło z masą ślizgającą się 1/
•
Niech będzie dane wahadło o strukturze kinematycznej:
Niech będzie dane wahadło o strukturze kinematycznej:
k
k
m
m
• Masę „m” możemy traktować jako punktową
• Masa „m” może wykonywać ruch postępowy
wzdłuż prowadnicy
• Prowadnica ma znikomo małą masę
w porównaniu do masy „m”
• Zmienną reprezentującą wydłużenie sprężyny
• Zmienną związaną z wychyleniem całego wahadła
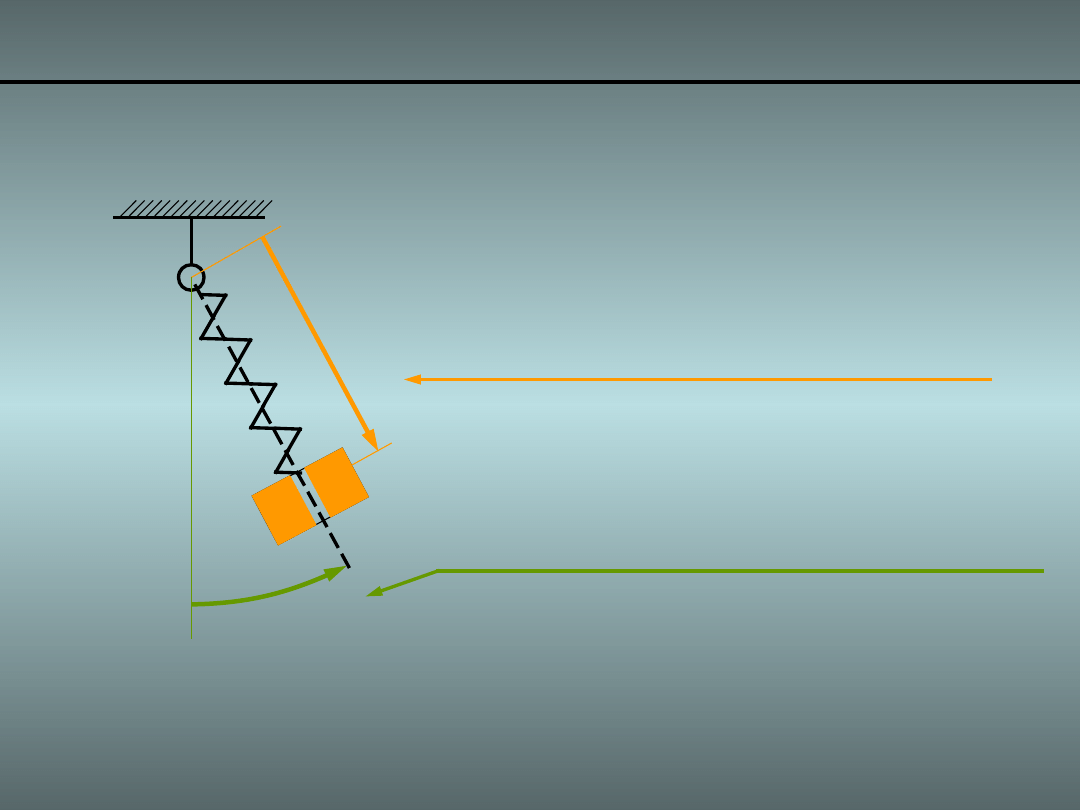
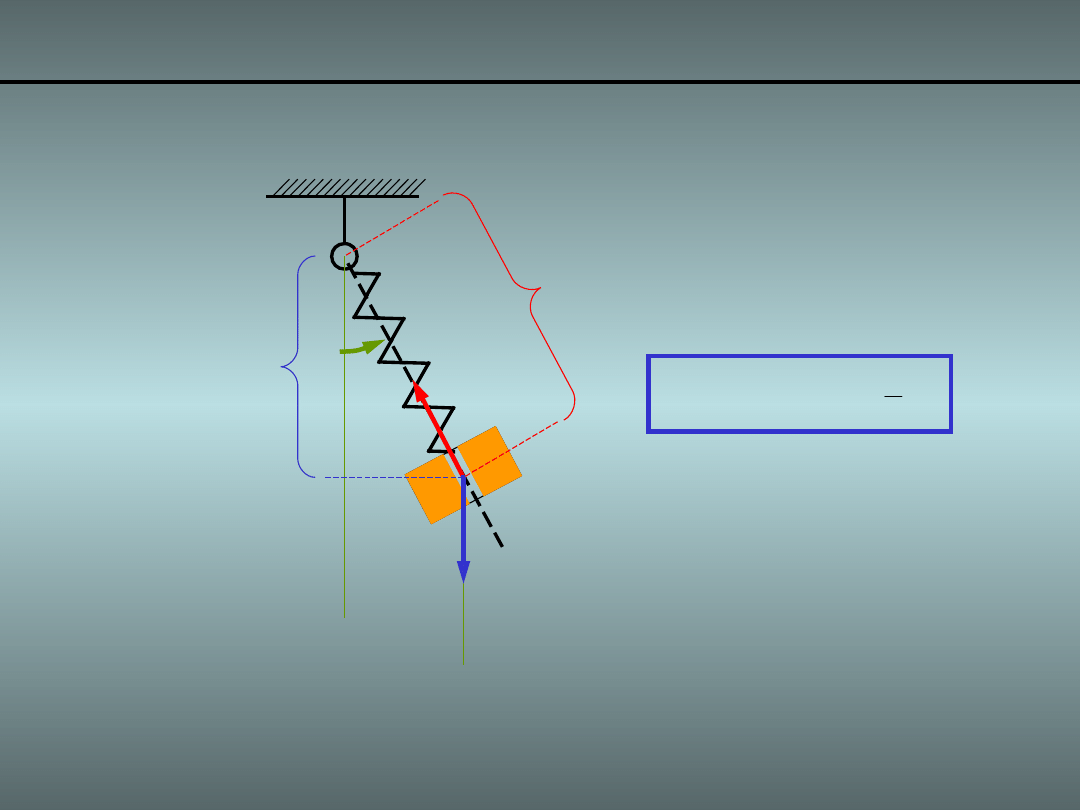
Przykład 1. Wahadło z masą ślizgającą się 2/
Przykład 1. Wahadło z masą ślizgającą się 2/
•
Przyjmujemy następujące zmienne uogólnione:
Przyjmujemy następujące zmienne uogólnione:
k
k
m
m
q
q
1
1
q
q
2
2
• Wprowadzając prędkość styczną
do trajektorii ruchu masy „m”
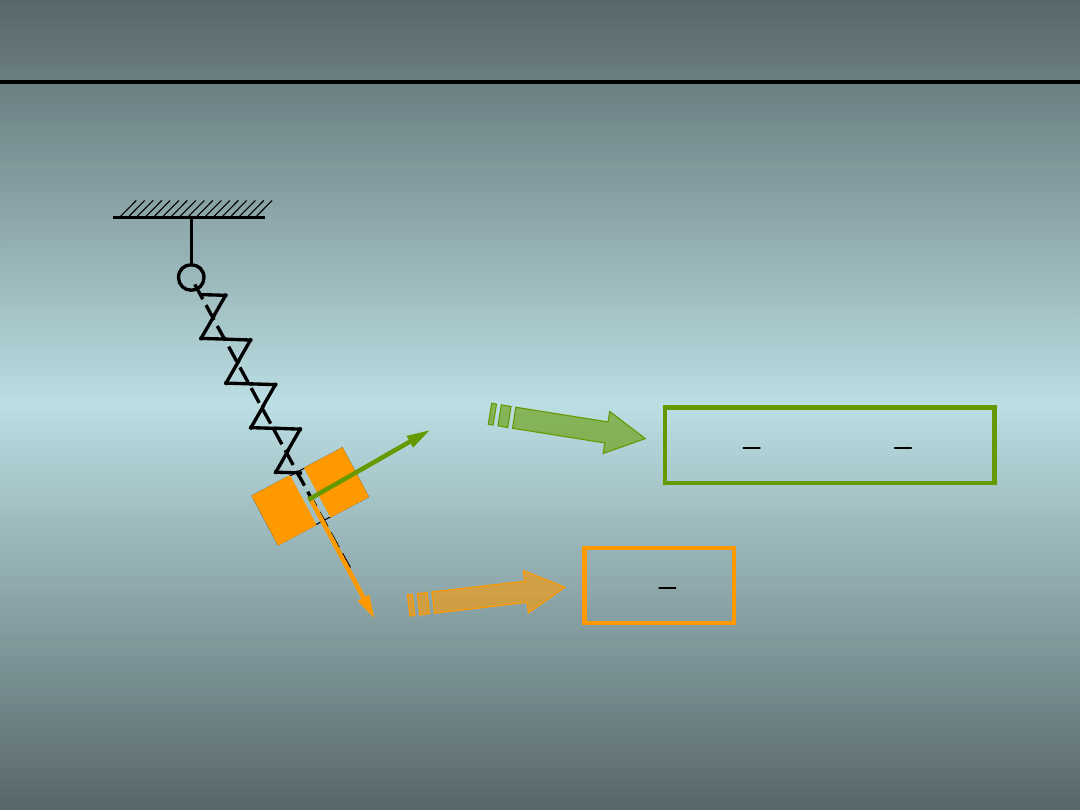
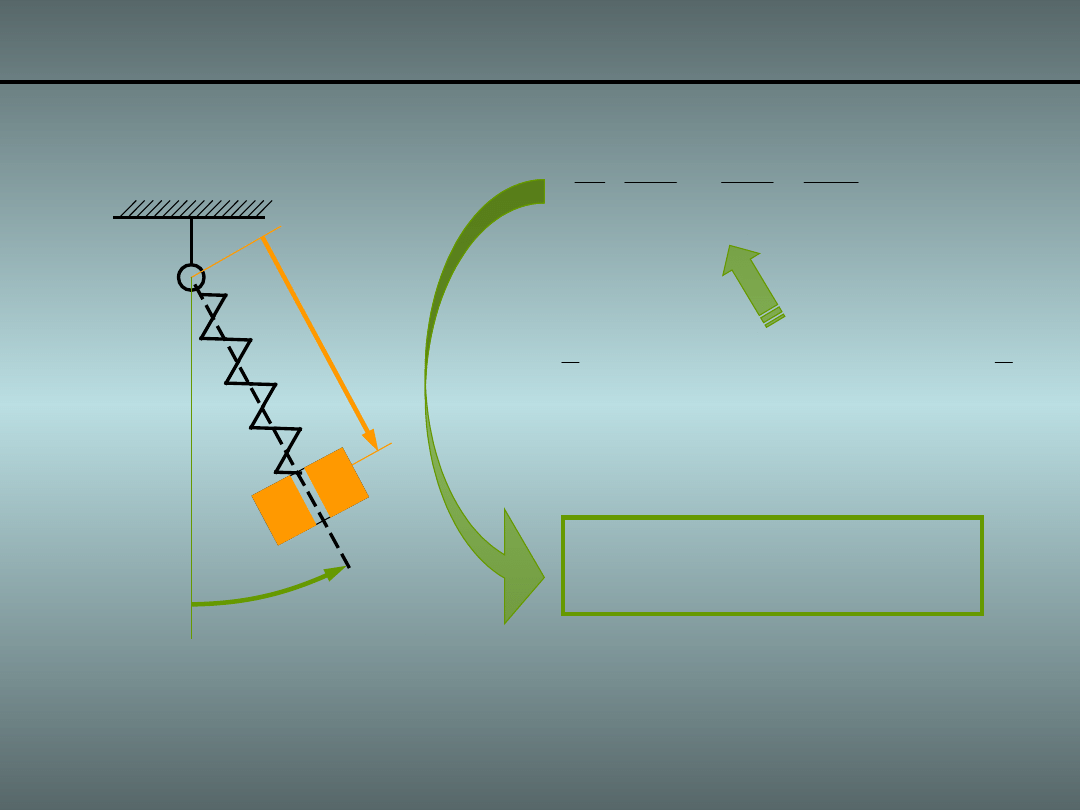
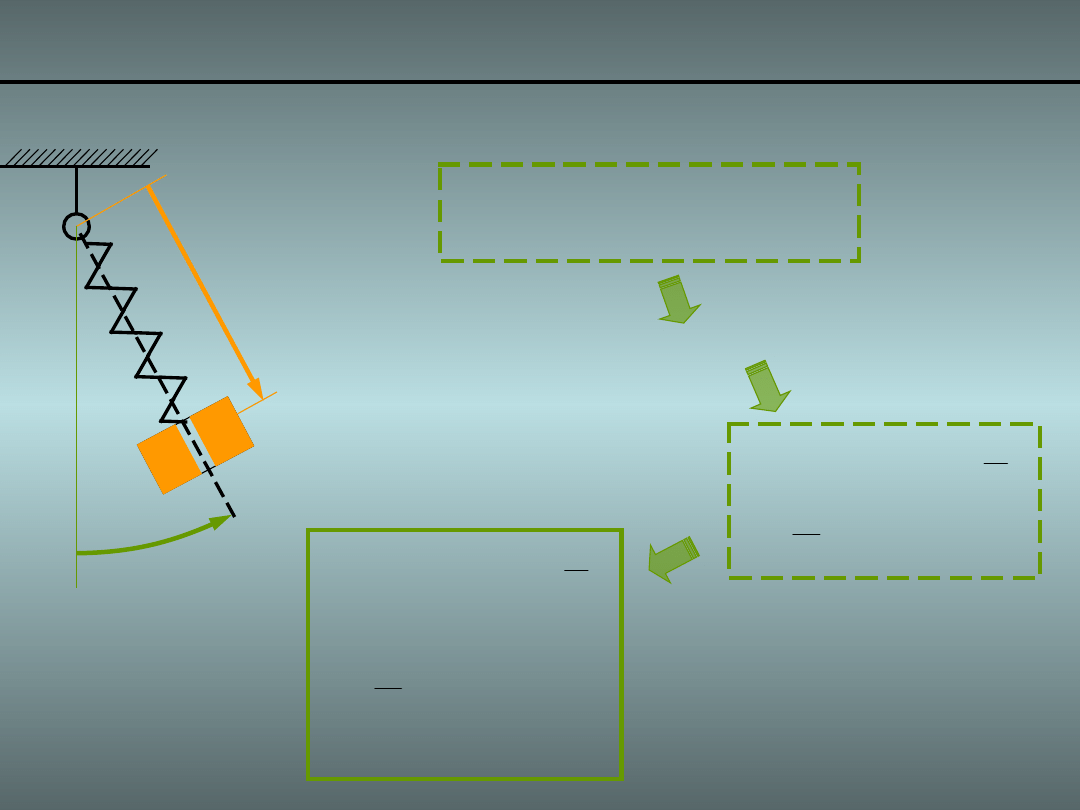
Przykład 1. Wahadło z masą ślizgającą się 3/
Przykład 1. Wahadło z masą ślizgającą się 3/
•
Możemy przejść do współrzędnych prostokątnych:
Możemy przejść do współrzędnych prostokątnych:
k
k
m
m
q
q
1
1
q
q
2
2
•
•
q
q
1
1
2
1
1
2
1
q
m
E
k
2
2
2
1
2
2
1
2
2
1
2
1
q
mq
q
q
m
E
k
Przykład 1. Wahadło z masą ślizgającą się 4/
Przykład 1. Wahadło z masą ślizgającą się 4/
•
Całkowita energia kinetyczna wynosi:
Całkowita energia kinetyczna wynosi:
k
k
m
m
q
q
1
1
q
q
2
2
•
•
q
q
1
1
2
2
2
1
2
1
2
1
q
q
q
m
E
k
Przykład 1. Wahadło z masą ślizgającą się 5/
Przykład 1. Wahadło z masą ślizgającą się 5/
•
Energia potencjalna wynosi:
Energia potencjalna wynosi:
k
k
m
m
2
1
2
1
2
1
cos
kq
q
mgq
E
p
q
q
2
2
mg
mg
l=q
l=q
1
1
cos(q
cos(q
2
2
)
)
kq
kq
1
1
Siła sprężystości sprężyny przeciwdziała
sile wywołanej grawitacją.
q
q
1
1
Przykład 1. Wahadło z masą ślizgającą się 6/
Przykład 1. Wahadło z masą ślizgającą się 6/
•
Równania Lagrange’a II rodzaju:
Równania Lagrange’a II rodzaju:
2
1
2
1
2
1
cos
kq
q
mgq
E
p
k
k
m
m
q
q
1
1
q
q
2
2
i
i
p
i
k
i
k
Q
q
E
q
E
q
E
dt
d
;
2
1
2
2
2
1
2
1
q
q
q
m
E
k
0
sin
2
0
cos
2
1
1
1
2
2
1
2
1
2
2
2
1
1
q
mgq
q
q
q
m
q
q
m
kq
q
mg
q
mq
q
m
Przykład 1. Wahadło z masą ślizgającą się 7/
Przykład 1. Wahadło z masą ślizgającą się 7/
•
Implementacja równań Lagrange’a II rodzaju:
Implementacja równań Lagrange’a II rodzaju:
k
k
m
m
x
x
1
1
, v
, v
1
1
q
q
2,
2,
,
,
2
2
0
sin
2
0
cos
2
1
1
1
2
2
1
2
1
2
2
2
1
1
q
mgq
q
q
q
m
q
q
m
kq
q
mg
q
mq
q
m
Sprowadzić do postaci kanonicznej
)
sin
2
(
1
cos
2
2
1
1
2
1
2
2
2
1
1
q
g
q
q
q
q
q
m
k
q
g
q
q
q
2
2
2
2
1
1
2
1
1
1
2
2
2
1
1
)
sin
2
(
1
cos
q
q
g
v
x
v
x
x
m
k
q
g
x
v
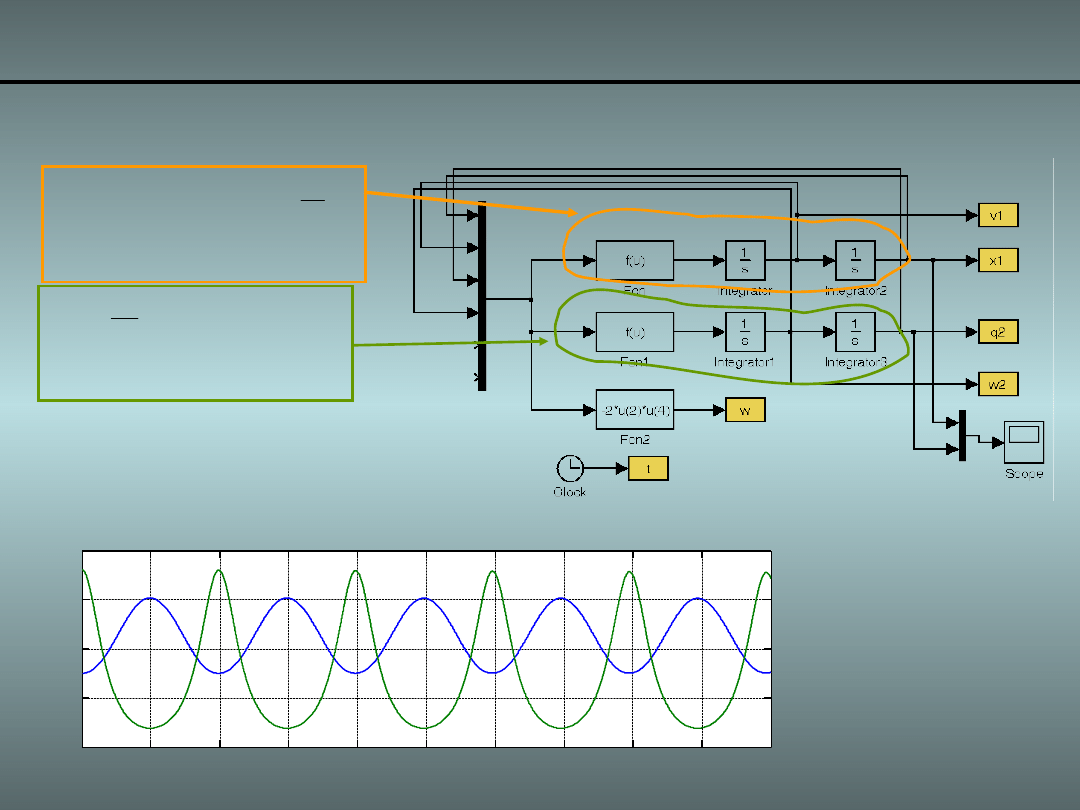
Przykład 1. Wahadło z masą ślizgającą się 8/
Przykład 1. Wahadło z masą ślizgającą się 8/
•
Implementacja równań Lagrange’a II rodzaju:
Implementacja równań Lagrange’a II rodzaju:
2
2
2
2
1
1
2
1
1
1
2
2
2
1
1
)
sin
2
(
1
cos
q
q
g
v
x
v
x
x
m
k
q
g
x
v
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
-0.2
0
0.2
0.4
0.6
x
x
1
1
q
q
2
2
wahadlo_slizgajace_v1.mdl
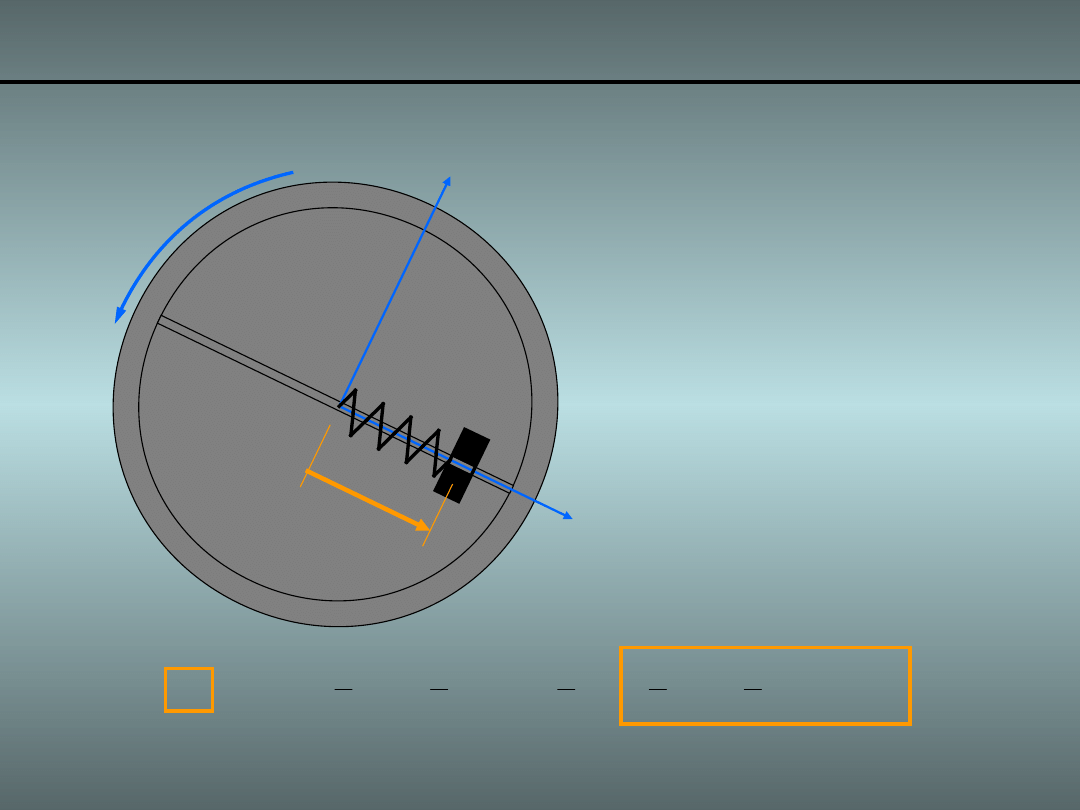
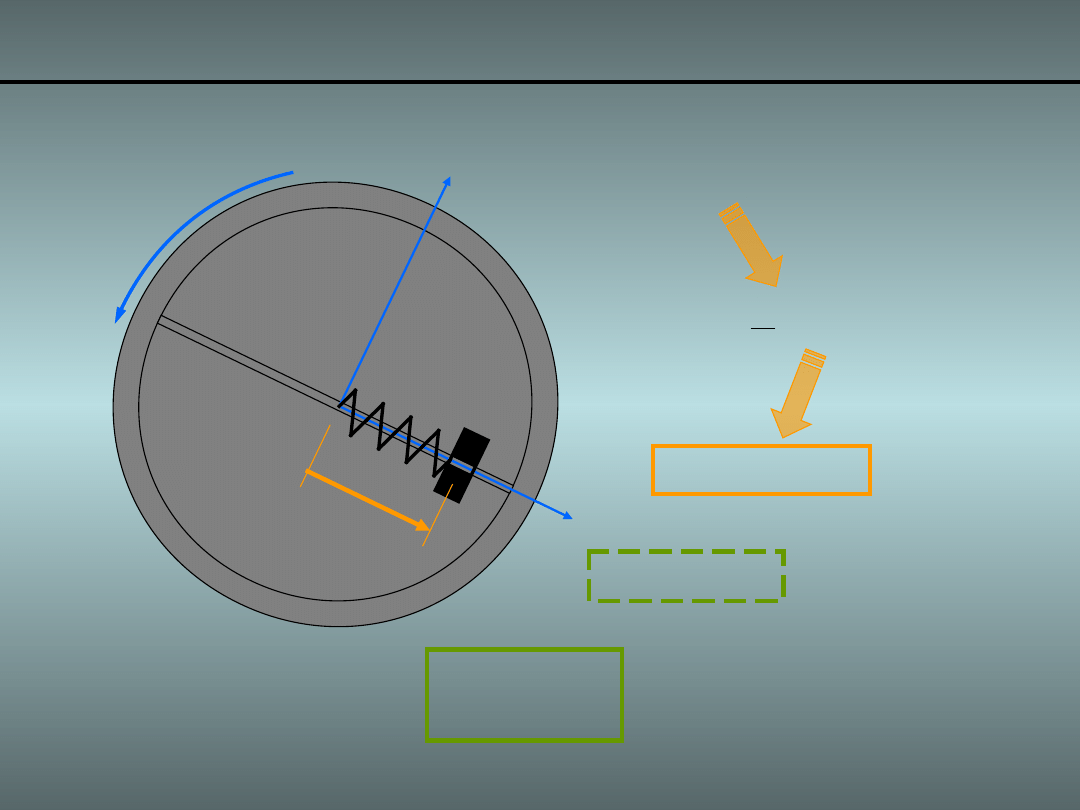
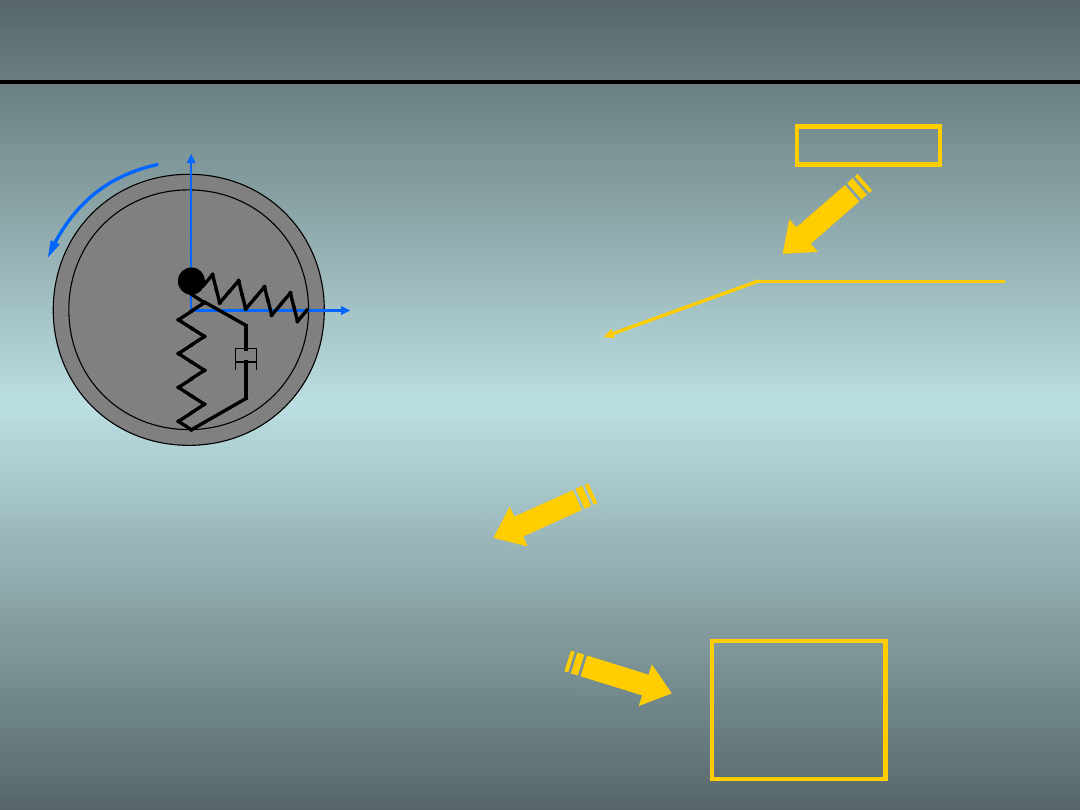
Przykład 2. Obracający się układ masa i sprężyna
Przykład 2. Obracający się układ masa i sprężyna
1/
1/
•
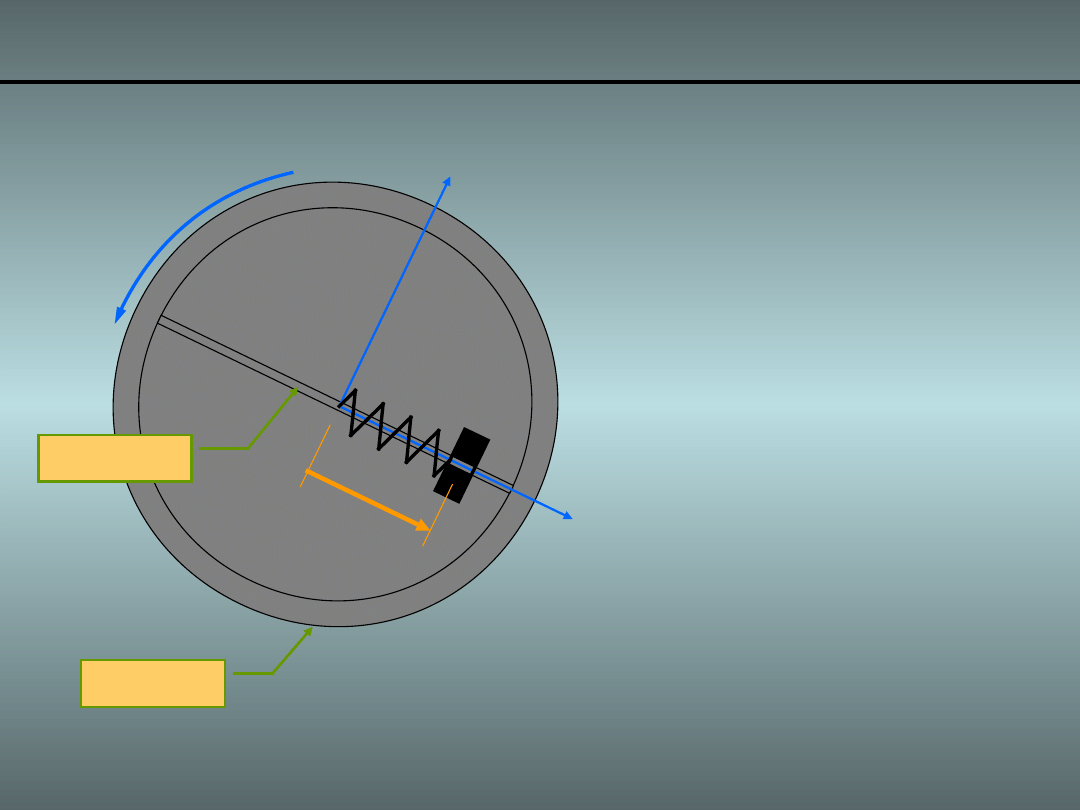
Niech będzie dane układ o strukturze kinematycznej:
Niech będzie dane układ o strukturze kinematycznej:
• Masę „m”
możemy
traktować jako
punktową
• Masa „m”
może
wykonywać
ruch
postępowy
wzdłuż
prowadnicy
• Wprowadzamy
układ
współrzędnych
„xy”
• Układ wiruje
ze stałą
prędkością
kątową
y
y
x
x
q
q
1
1
k
k
m
m
Pierścień
Prowadnica
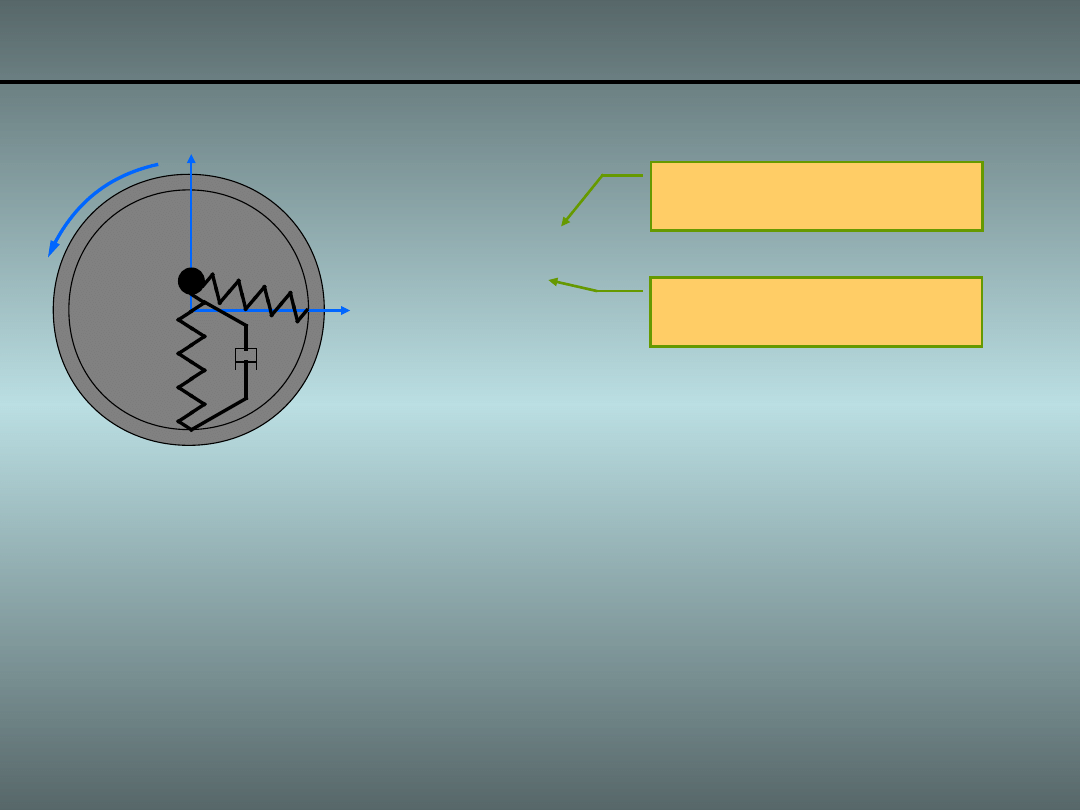
Przykład 2. Obracający się układ masa i sprężyna
Przykład 2. Obracający się układ masa i sprężyna
2/
2/
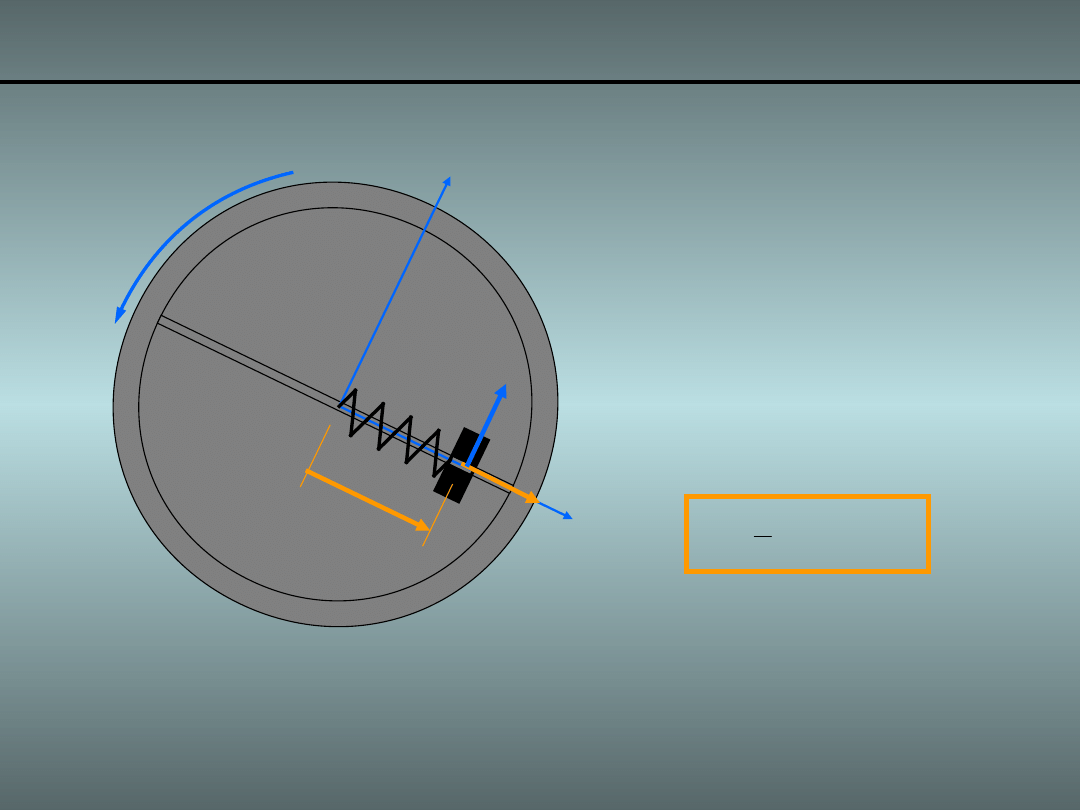
•
Energia kinetyczna:
Energia kinetyczna:
y
y
x
x
q
q
k
k
m
m
2
2
2
2
1
q
q
m
E
k
Mamy 1 stopień swobody:
- ruch postępowy masy
q
q
.
.
q
q
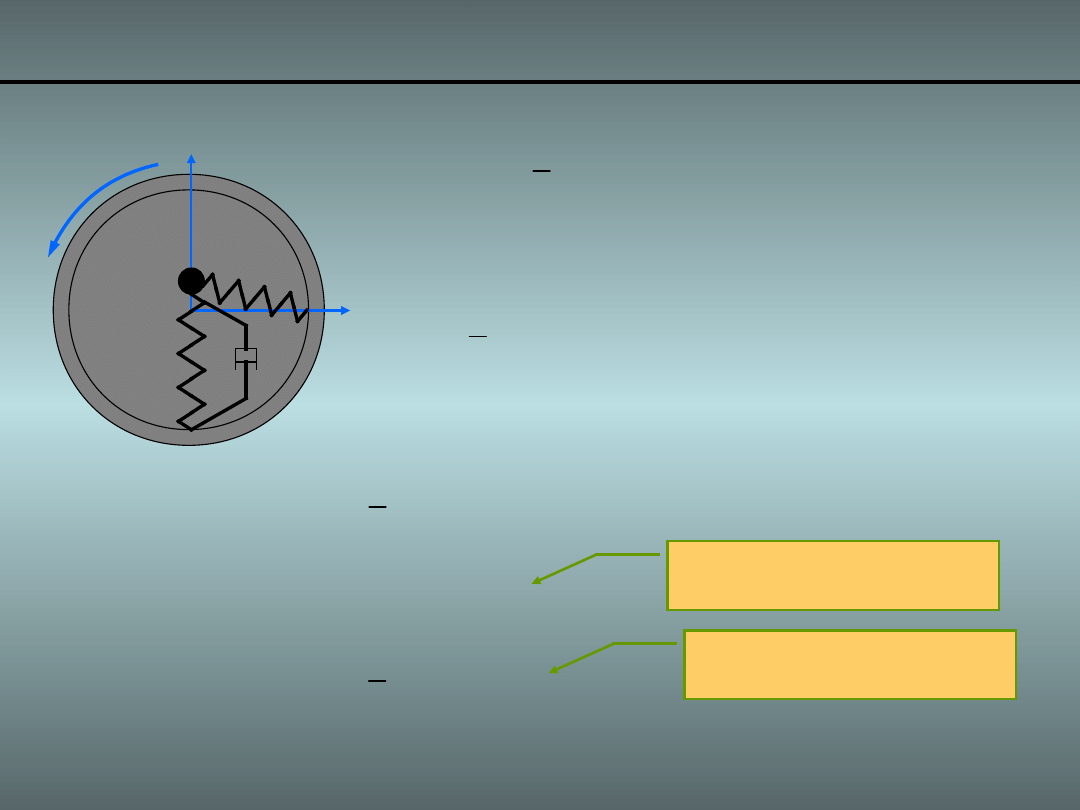
Przykład 2. Obracający się układ masa i sprężyna
Przykład 2. Obracający się układ masa i sprężyna
3/
3/
•
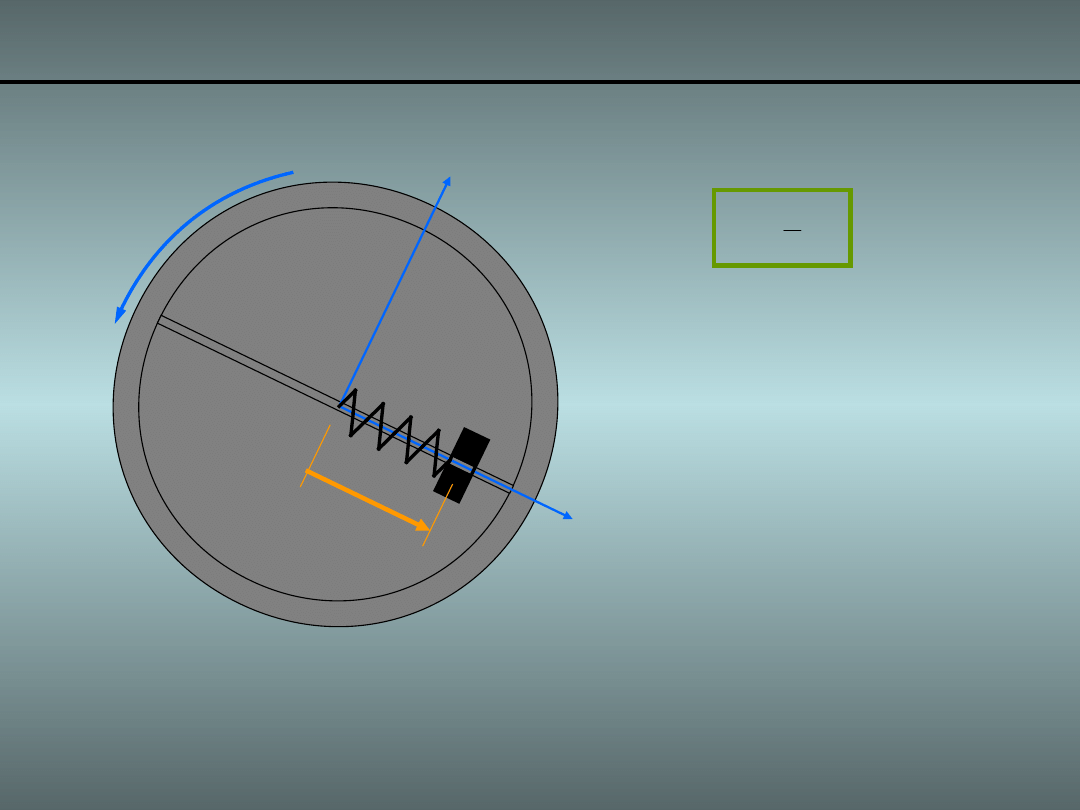
Energia potencjalna:
Energia potencjalna:
y
y
x
x
q
q
k
k
m
m
2
2
1
kq
E
p
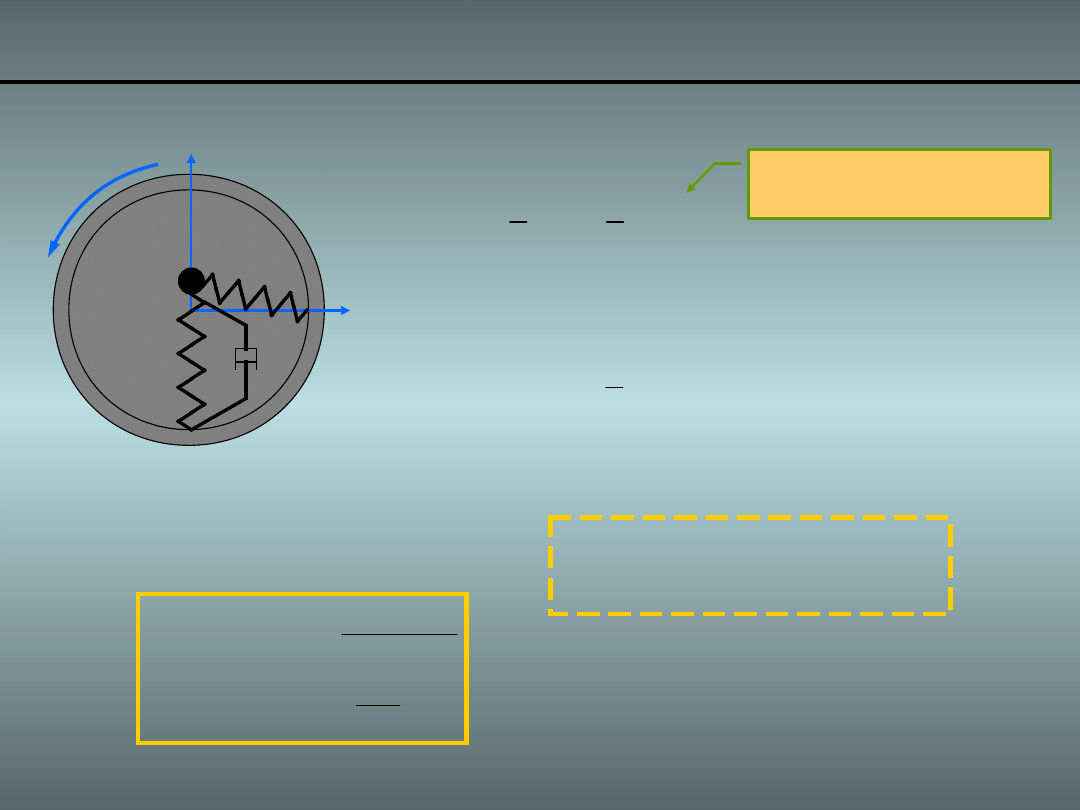
Przykład 2. Obracający się układ masa i sprężyna
Przykład 2. Obracający się układ masa i sprężyna
4/
4/
•
Lagrangian:
Lagrangian:
y
y
x
x
q
q
k
k
m
m
2
2
2
2
2
2
2
)
(
2
1
2
1
2
1
2
1
2
1
q
m
k
q
m
kq
q
m
q
m
E
E
L
p
k
Przykład 2. Obracający się układ masa i sprężyna
Przykład 2. Obracający się układ masa i sprężyna
5/
5/
•
Równanie Lagrange’a:
Równanie Lagrange’a:
y
y
x
x
q
q
k
k
m
m
0
)
(
2
q
m
k
q
m
0
)
(
2
q
m
k
q
0
)
(
2
2
q
q
n
q
q
n
)
(
2
2
v
q
q
v
n
)
(
2
2
Tu zmienna uogólniona „q” jest
przemieszczeniem liniowym masy
krecona_masa_1dof_v2.mdl
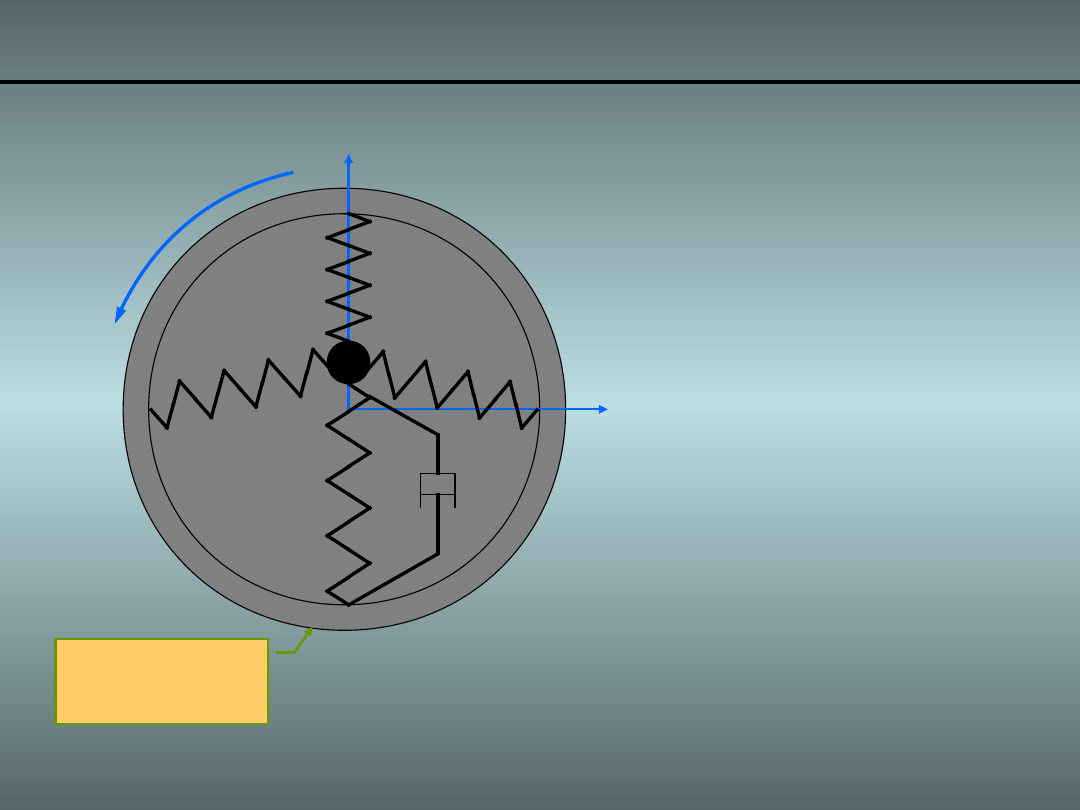
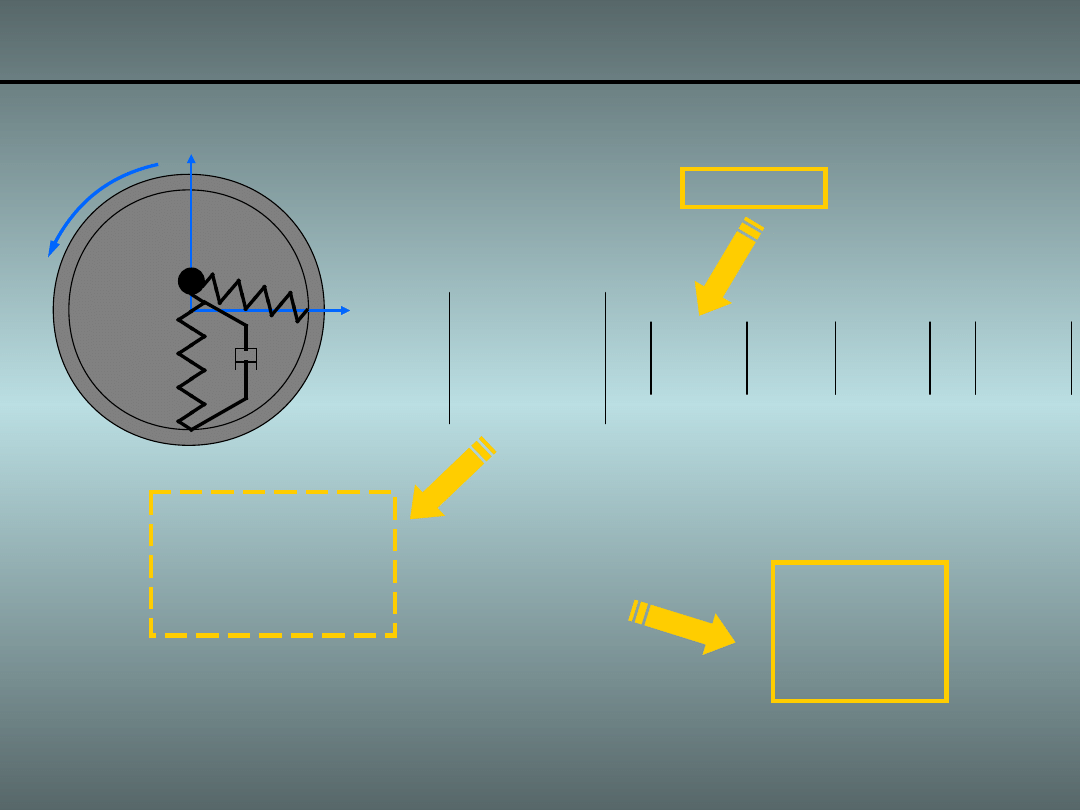
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
1/
1/
•
Niech będzie dane układ o strukturze kinematycznej:
Niech będzie dane układ o strukturze kinematycznej:
• Masę „m”
możemy
traktować jako
punktową
• Masa „m”
może
wykonywać
ruch
postępowy
wzdłuż dwóch
osi „x” i „y”
• Wprowadzamy
układ
współrzędnych
„xy”
• Układ wiruje
ze stałą
prędkością
kątową
x
x
z
z
y
y
m
m
Pierścień wirujący
ze stałą
prędkością kątową
k
k
2
2
k
k
1
1
c
c
1
1
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
1/
1/
•
Związek pomiędzy prędkością kątową a liniową:
Związek pomiędzy prędkością kątową a liniową:
• Ale gdy ruch
obrotowy
dokonuje się
tylko wokół osi
„z”, to:
r
ω
v
y
x
k
z
x
j
z
y
i
z
y
x
k
j
i
v
v
v
y
x
z
x
z
y
z
y
x
z
y
x
)
1
(
x
y
x
z
y
z
v
v
v
y
x
z
x
z
y
z
y
x
0
x
y
v
v
v
z
z
z
y
x
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
z
z
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
2/
2/
•
Związek pomiędzy prędkością kątową a liniową:
Związek pomiędzy prędkością kątową a liniową:
• Wykorzystując macierze skośnie
symetryczne
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
r
ω
v
x
y
x
z
y
z
y
x
z
x
z
y
z
y
x
v
v
v
y
x
z
x
z
y
x
y
x
z
y
z
x
y
x
z
y
z
z
y
x
0
0
0
0
x
y
v
v
v
z
z
z
y
x
• Ale gdy ruch
obrotowy
dokonuje się
tylko wokół osi
„z”, to:
z
z
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
4/
4/
•
Składowe prędkości liniowej:
Składowe prędkości liniowej:
• Stąd całkowity wektor prędkość liniowej masy
skupionej „m” w rotującym układzie współrzędnych
ma postać:
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
0
x
y
v
v
v
z
z
z
y
x
z
z
Składowa prędkości
liniowej działająca w
kierunku osi „x”
Składowa prędkości
liniowej działająca w
kierunku osi „y”
0
x
y
y
x
z
z
v
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
5/
5/
•
Energia kinetyczna układu:
Energia kinetyczna układu:
• Po rozpisaniu wyrażenia na energię
kinetyczną otrzymujemy:
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
z
z
Składnik odpowiedzialny
za siły żyroskopowe
)
)
(
)
((
2
1
2
2
x
y
y
x
m
E
z
z
k
)
2
2
(
2
1
2
2
2
2
2
2
x
x
y
y
y
y
x
x
m
E
z
z
z
z
k
• Grupując wyrażenia wewnątrz nawiasu
otrzymujemy:
)
(
2
1
2
2
2
y
x
m
E
k
)
(
1
x
y
y
x
m
E
z
k
)
(
2
1
2
2
2
0
x
y
m
E
z
k
Składnik potencjalny
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
6/
6/
•
Energia potencjalna układu i funkcja dyssypacji:
Energia potencjalna układu i funkcja dyssypacji:
• Funkcja dyssypacji:
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
z
z
Zakładamy niewielkie
deformacje sprężyn
2
2
2
1
2
1
2
1
y
k
x
k
E
p
2
1
2
1
x
c
D
• Równania Lagrange’a mają postać:
0
2
0
2
2
2
1
2
1
y
m
y
k
x
m
y
m
x
c
x
m
x
k
y
m
x
m
z
z
z
z
m
y
k
y
x
y
m
x
c
x
k
x
y
x
z
z
z
z
2
2
1
1
2
2
)
(
2
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
7/
7/
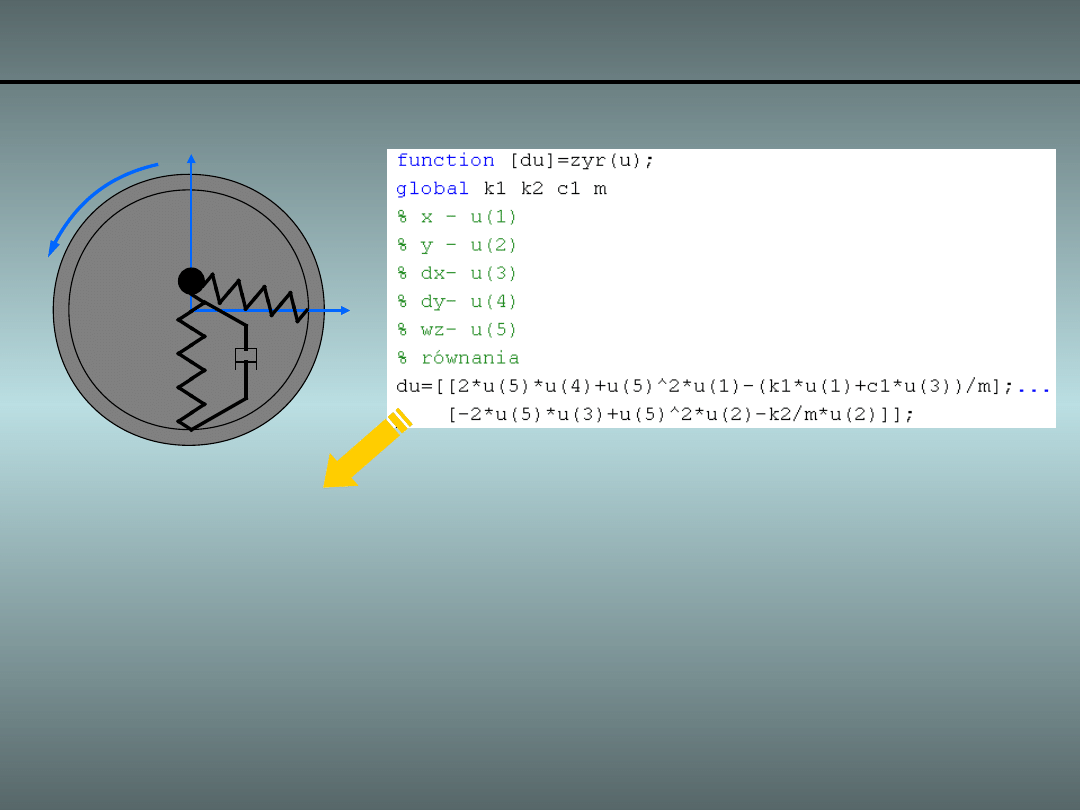
•
Implementacja w programie Matlab – „m-funkcja”:
Implementacja w programie Matlab – „m-funkcja”:
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
z
z
• Zapisano w pliku o nazwie:
„efekt_zyroskopowy_1.m”
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
8/
8/
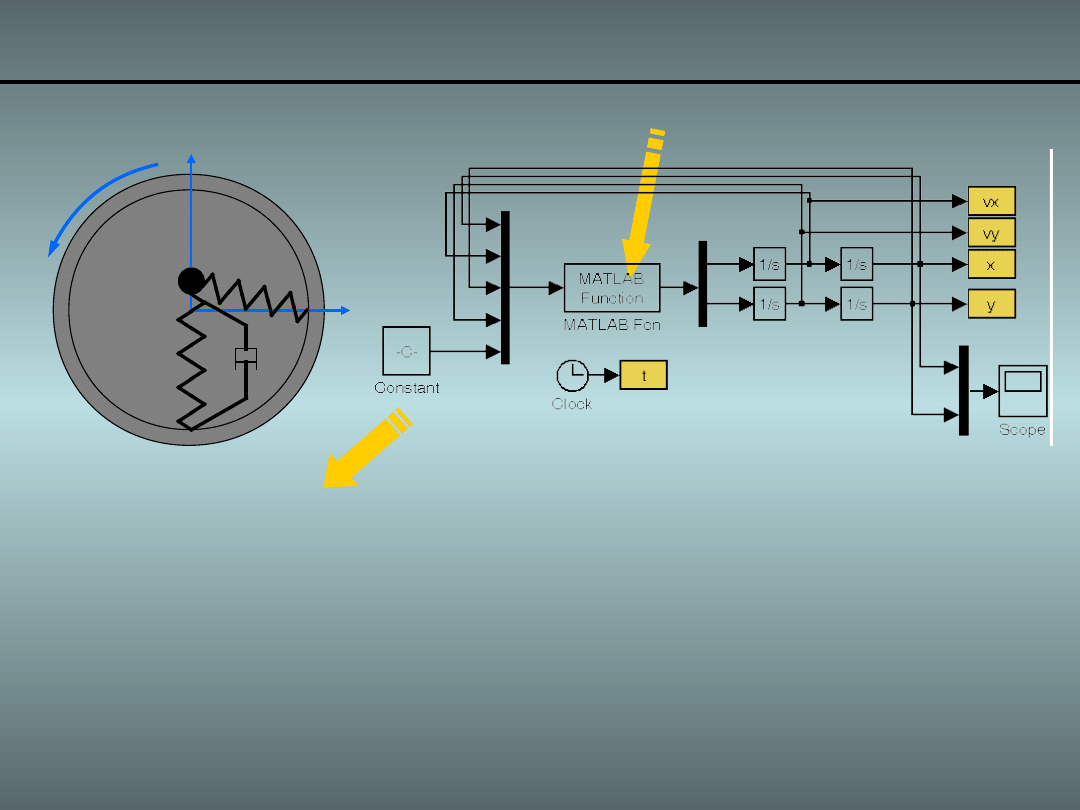
•
Implementacja w programie Matlab – „m-funkcja”:
Implementacja w programie Matlab – „m-funkcja”:
x
x
y
y
m
m
k
k
2
2
k
k
1
1
c
c
1
1
z
z
• dane:
>> global k1 k2 c1 m
>> k1=1000;k2=1000;c1=4;m=100;
efekt_zyroskop_nr_1_v1.mdl
Przykład 3. Obracająca się masa i sprężyny o 2DoF
Przykład 3. Obracająca się masa i sprężyny o 2DoF
9/
9/
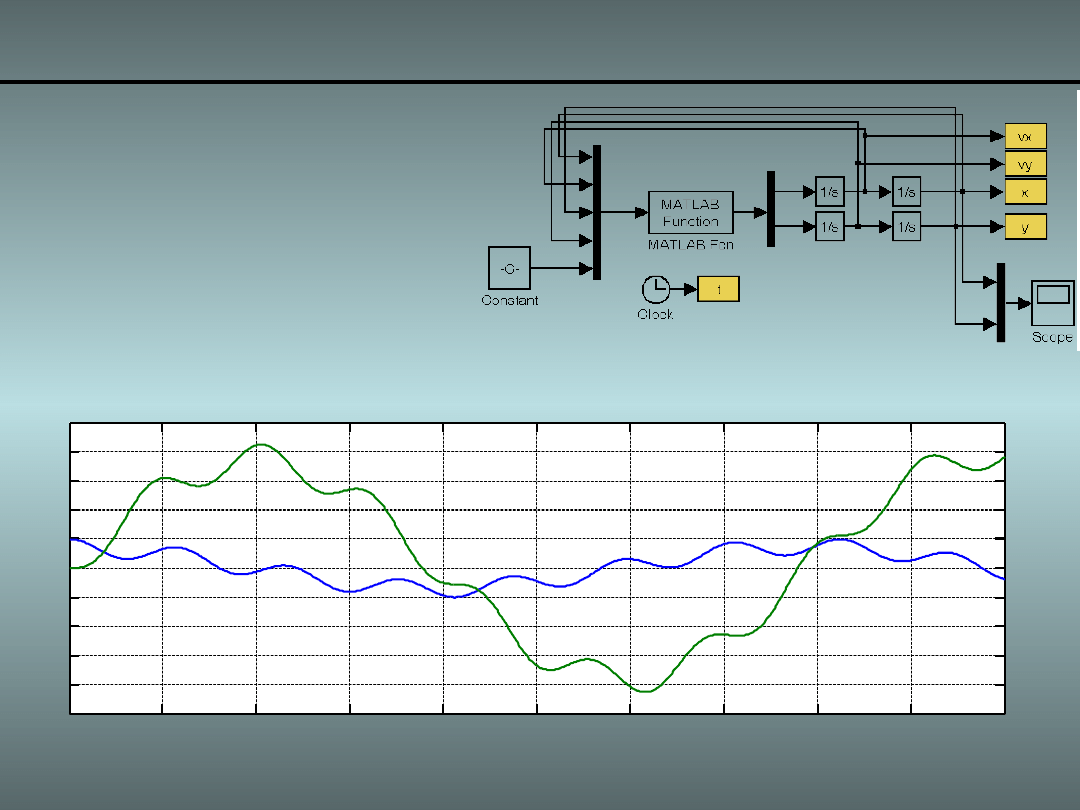
•
Przykładowe wyniki symulacji:
Przykładowe wyniki symulacji:
• dane:
>> global k1 k2 c1 m
>>
k1=1000;k2=1000;c1=4;m=
100;
0
1
2
3
4
5
6
7
8
9
10
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
x
x
y
y
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
Siedem cudów mechatroniki, studia, elementy mechatroniki
Elementy Mechatroniki Harmonogram NZG 1,2
Mechatronika Zawodem Przyszłości, studia, elementy mechatroniki
Pytania na egzamin z Elementów Mechatroniki - odpowiedzi, studia, elementy mechatroniki
Projektowanie mechatroniczne, studia, elementy mechatroniki
Karta katalogu ocen konc Elementy Mechatroniki Mechatronicy sem IV
4 2 vademecum echosondy (w tym przykładzie wodnej), studia, studia Politechnika Poznańska - BMiZ - M
porozumienie 2010, Mechatronika AGH IMIR, semestr 6, Elementy wyk. robotów 2, ARTAS.SAM.v6.0.45.Mult
Elementy teorii liczb w przykładach
SX028a Przyklad Obliczenie nosnosci polaczenia srubowego elementów zimnogietych
Montaż i demontaż elementów i podzespołów urządzeń i systemów mechatronicznychu
Sprężyny płaskie są to elementy wykonane z blachy lub taśm o niewielkiej grubości, ŚCIĄGI MECHATRONI
przykład rysunku konstrukcyjnego elementu żelbetowego
KOLOKWIUM Przykłady, Politechnika Poznańska, Mechatronika, Semestr 03, Mechanika płynów - wykłady, M
Przykłady elementarzy i materiałów dydaktycznych z błędami, przedszkole, różne
list intencyjny, Mechatronika AGH IMIR, semestr 6, Elementy wyk. robotów 2, ARTAS.SAM.v6.0.45.Multi-
pp test zima 05 air boratynski, Studia - Mechatronika PWR, Elementy i układy elektroniczne (Bogusław
Przykłady techniczne elementu
więcej podobnych podstron