
GEODEZJA I
FOTOGRAMETRIA
WYKŁAD
Pomiary szczegółowe 1
Katedra Geodezji im. K. Weigla
ul. Poznańska 2/34
Podział prac geodezyjnych
i kartograficznych
Prace geodezyjne i kartograficzne dzielą się na
pomiary i opracowania geodezyjne (wg normy):
-
osnów geodezyjnych
, osnów grawimetrycznych
i magnetycznych,
- szczegółowe
sytuacyjne i wysokościowe
inwentaryzacyjne,
-
realizacyjne i kontrolne
,
- związane z
katastrem nieruchomości
(ewidencją
gruntów, budynków i lokali),
- inne pomiary i opracowania geodezyjne i
kartograficzne.

Jednostki miary w geodezji:
1.
Długości i wysokości:
1 m = 100 cm = 1000 mm 1 m = 0.01 hm = 0.001
km
1 mkm = 0.001 mm (mkm – mikrometr)
1 km = 10 hm = 1000 m (hm – hektometr)
1 cal (inch) [", in] = 2,54 cm
1 stopa (foot) [ft] = 12"
1 jard (yard) [yd] = 3 ft
1 mila morska (nautical mile) [NM, nmi] = 1852 m
Mila morska = 1’ (kątowej) łuku południka Ziemi

Jednostki miary cd.
2.
Kątów (
poziomych i pionowych):
LEGALNA:
1
RADIAN
= kąt środkowy oparty na łuku okręgu o
długości równej promieniowi.
DOPUSZCZONE:
Stopniowa i gradowa
2π rad = 360
o
= 400
g
1 rad = 360
o
/2π = 400
g
/2π
1 rad = 57.295780
o
= 57
o
17
’
44
”
.8
1 rad = 63.661977
g
= 63
g
66
c
19.
cc
77
Jednostki miary kąta cd.
Przeliczanie:
360
o
= 400
g
400
g
= 360
o
1
o
= 400
g
/360 = 1.11111(1)
g
1
g
= 360
o
/400 =
0.9
o
(grad)
1
o
= 60’ = 3600” 1
g
= 100
c
=
10000
cc
1’ = 60” 1
c
= 100
cc
(centigrad)
1’ = 1
c
85.(185)
cc
1
c
= 32.4 ”
1” = 3.086
cc
(centi-centigrad)

Jednostki miary cd.
3.
Jednostki miary pola
:
1 m
2
= 10000 cm
2
1 a = 100 m
2
(1a - ar)
1 ha = 100 a = 10000 m
2
(1ha - hektar)
1 km
2
= 100 ha = 1000 000 m
2

Podstawowe zadania geodezji:
- pomiary wzajemnego położenia na powierzchni
Ziemi punktów związanych z obiektami
usytuowanymi na tej powierzchni
(
inwentaryzacyjne
).
- pomiary niezbędne do sporządzania map
(inwentaryzacyjne).
- pomiary dla wyznaczania położenia punktów przy
realizacji różnych zadań inżynierskich
(
realizacyjne
).
- kontrola realizacji zadań (pomiary
kontrolne
).
- pomiary prowadzące do określenie zmian
położenia wybranych punktów obiektów i
eksploatowanych urządzeń oraz punktów
powierzchni terenu (
pomiary przemieszczeń
).
Każde zadanie geodezyjne związane z pomiarami
jest oparte na osnowie geodezyjnej (bazie
pomiarów).

Pomiary i opracowania szczegółowe
Są to pomiary wykonywane bezpośrednio
(w terenie) lub pośrednio met. teledetekcji
(fotogrametrycznie).
Pomiary i opracowania szczegółowe obejmują:
• zakładanie, pomiar i obliczenia
geodezyjnych
osnów pomiarowych
sytuacyjnych
i wysokościowych,
• pomiary
sytuacyjne
, w tym pomiary:
- stanu zagospodarowania terenu - zabudowy,
ogrodzeń, komunikacji - uzbrojenia terenu
w urządzenia techniczne nadziemne, naziemne
i podziemne, - innych obiektów systemu
informacji o terenie.
- pomiary
wysokościowe
(rzeźby terenu), czyli
naturalnych i sztucznych form ukształtowania
powierzchni terenu,

Pomiary i opracowania szczegółowe cd.
3. opracowanie pomiarów na potrzeby
systemu
informacji o terenie (GIS)
, w tym opracowania
kartograficzne i budowa numerycznych modeli
terenu,
4. prowadzenie
baz danych
o obiektach systemu
informacji o terenie.
Osnowy geodezyjne
Osnowę geodezyjną
(bazę pomiarów) stanowią
punkty oznaczone w terenie trwałymi
znakami
geodezyjnymi
, których wzajemne położenie
określają współrzędne geodezyjne w przyjętym
układzie odniesienia.

Ogólny podział osnów geodezyjnych:
1. pozioma – współrzędne {X,Y}
2. wysokościowa – współrzędne {H} (wysokości
określone względem przyjętego poziomu
odniesienia).
Ze względu na znaczenie osnowy dla zadań:
-
podstawowe
(nawiązanie osnów
szczegółowych),
-
szczegółowe
(nawiązanie osnów pomiarowych
oraz numerycznych modeli terenu i zdjęć
fotogrametrycznych do państwowego systemu
odniesień przestrzennych),
-
pomiarowe
(do oparcia pomiarów i wyznaczeń
szczegółowych, realizacyjnych, katastralnych i
innych).

Klasyfikacja poziomej osnowy geodezyjnej
- podstawowa i szczegółowa osnowa pozioma: I,II
i III klasy.
- punkty osnowy pomiarowej nie są dzielone na
klasy.
Podstawowa osnowa pozioma I klasy:
a) sieć geodezyjna pomierzona techniką
GPS
,
(część europejskiej sieci
EUREF
na terenie Polski
-
EUREF- POL
),
b) sieć
POLREF
stanowiąca zagęszczenie sieci
EUREF-POL
,
c) punkty dawnej
sieci astronomiczno-geodezyjnej
i wypełniającej.
Miarą dokładności osnowy podstawowej jest błąd
położenia punktu 0.05 m
.
Szczegółowa osnowa
pozioma to punkty II i III
klasy, dla których średni błąd położenia względem
wyższych klas wynosi odpowiednio 0.03 m i 0.05 m.

Klasyfikacja wysokościowej osnowy
geodezyjnej
Podstawowa i szczegółowa geodezyjna osnowa
wysokościowa
dzieli się na
cztery klasy I,II,III i IV.
Punkty osnowy
pomiarowej
nie są dzielone na
klasy.
Podstawowa geodezyjna osnowa wysokościowa
składa się z punktów
niwelacji precyzyjnej
I i II
klasy (błąd 1 i 2 mm/km).
Do
klasy III i IV
należą punkty szczegółowej
osnowy wysokościowej (błąd 4 mm i 10 mm/km).
Wysokościowa osnowa pomiarowa
charakteryzuje się błędem nie większy niż 20
mm/km.
Wysokościowa
, a także
pozioma
osnowa
pomiarowa jest zbiorem punktów, których błąd
położenia (współrzędnych) względem osnów
wyższych klas < 0.10 m.
Cechy geodezyjnych osnów wysokościowych.
Klasa i nazwa
sieci
Punkty
nawiąza
nia
śr. długość
linii
niwelacji
śr.
odległość
punktów
śr. bł.
niwelacji
mm
I precyzyjna
-
50 km
-
1
II precyzyjna
I kl
25 km
8 km
2
III
szczegółowa
I-II kl
18 km
6 km
4
IV
szczegółowa
I-III kl
-
2 km
10
pomiarowa
II-IV kl
-
-
20

Zakładanie i uzupełnianie osnów geodezyjnych
1. Metody klasyczne (geometryczne),
2. Metody fotogrametryczne (teledetekcja),
3. Metody oparte na GPS.
Metody klasyczne wykorzystują łączenie punktów w
sieci: triangulacyjne i poligonowe lub dowolnie
powiązane w formy figur geometrycznych np.
wcięcia punktów, sieci modularne
.
Elementem sieci może być:
linia pomiarowa,
trójkąt, czworobok geodezyjny, ciąg poligonowy.
Ciągi poligonowe – lokalne i nawiązane.
Ciągi zamknięte, dwustronnie i jednostronnie
nawiązane.
Orientację w sieci zapewniają współrzędne
punktów i
azymuty boków
sieci.
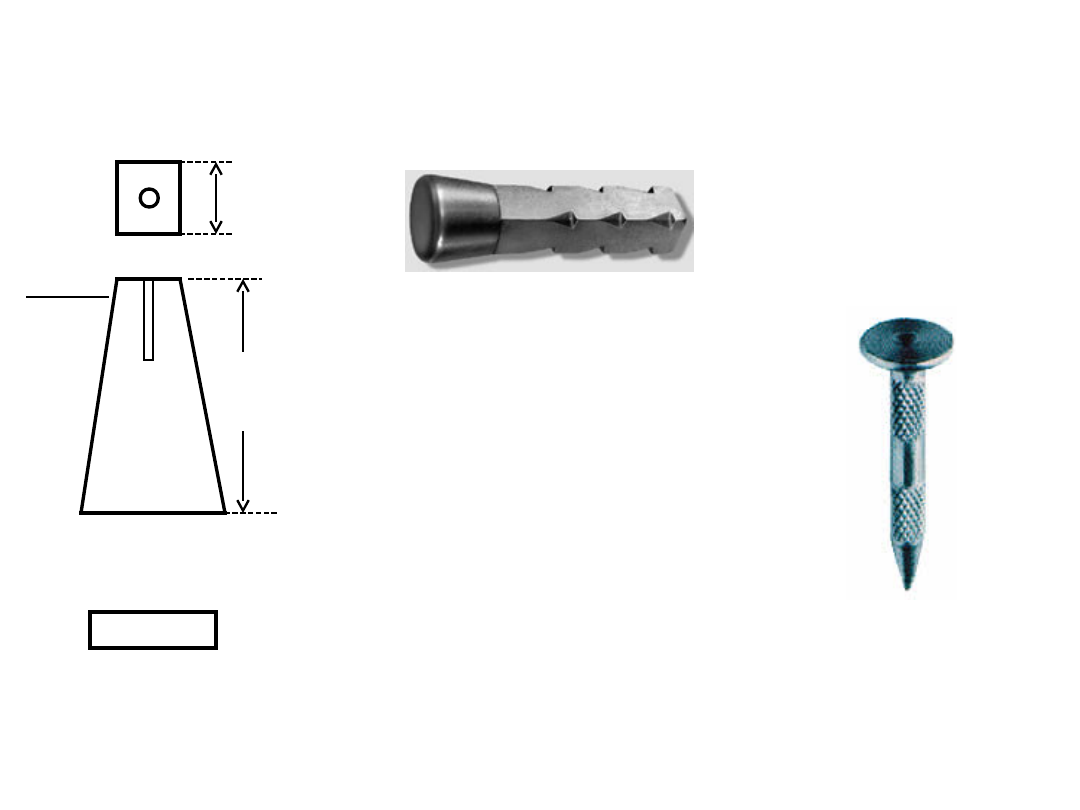
Stabilizacja punktów, znaki geodezyjne
Typowe znaki geodezyjne
70 cm
16 cm
Płyta betonowa
Stabilizacja podwójna znakiem betonowym z rurką
Reper ścienny
Znak pomiarowy stalowy
Znaki do stabilizacji punktów osnowy pomiarowej
kamienne
Znaki geodezyjne
- znaki z trwałego materiału, określające
położenie punktów osnowy geodezyjnej.
Inwestor jest zobowiązany chronić
znaki geodezyjne
sieci
pomiarowych znajdujące się na terenie budowy przed
zniszczeniem.
W przypadku potrzeby przesunięcia lub usunięcia znaku
należy o tym powiadomić Wydział Geodezji.
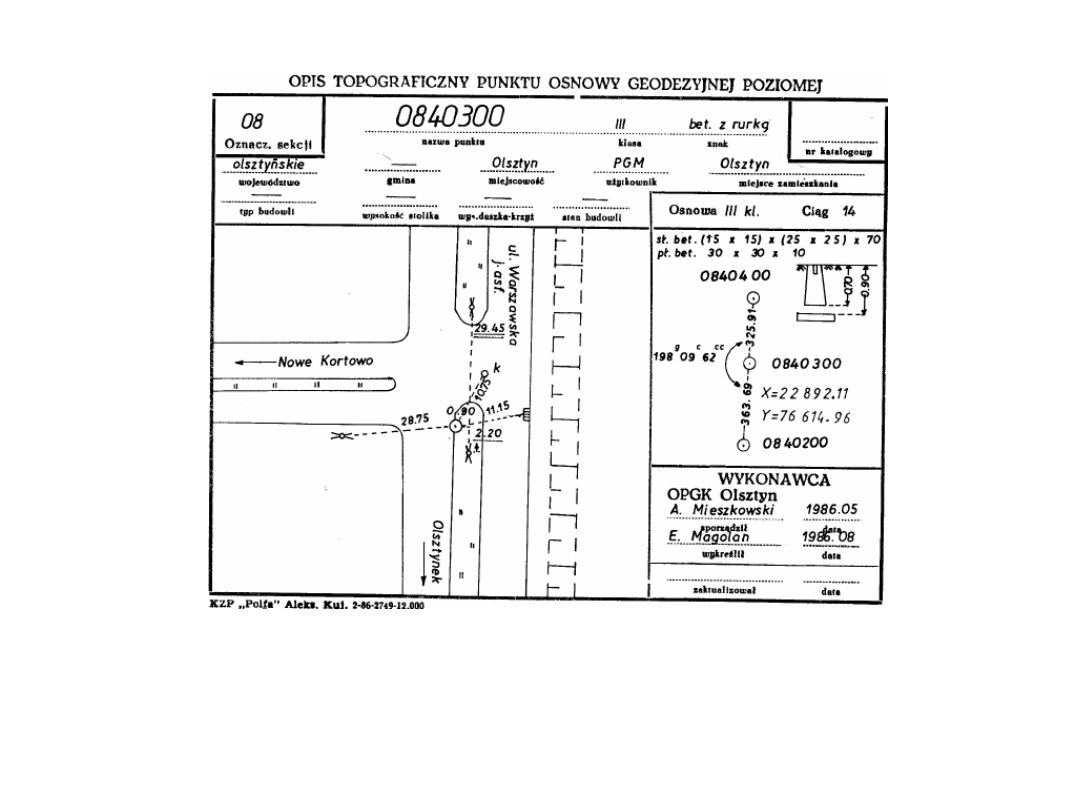
Opis topograficzny punktu osnowy
Punkty, na których będzie oparty pomiar, należy
utrwalić
znakami geodezyjnymi
i sporządzić dla nich
opisy
topograficzne
w nawiązaniu do
trwałych szczegółów
sytuacyjnych
.
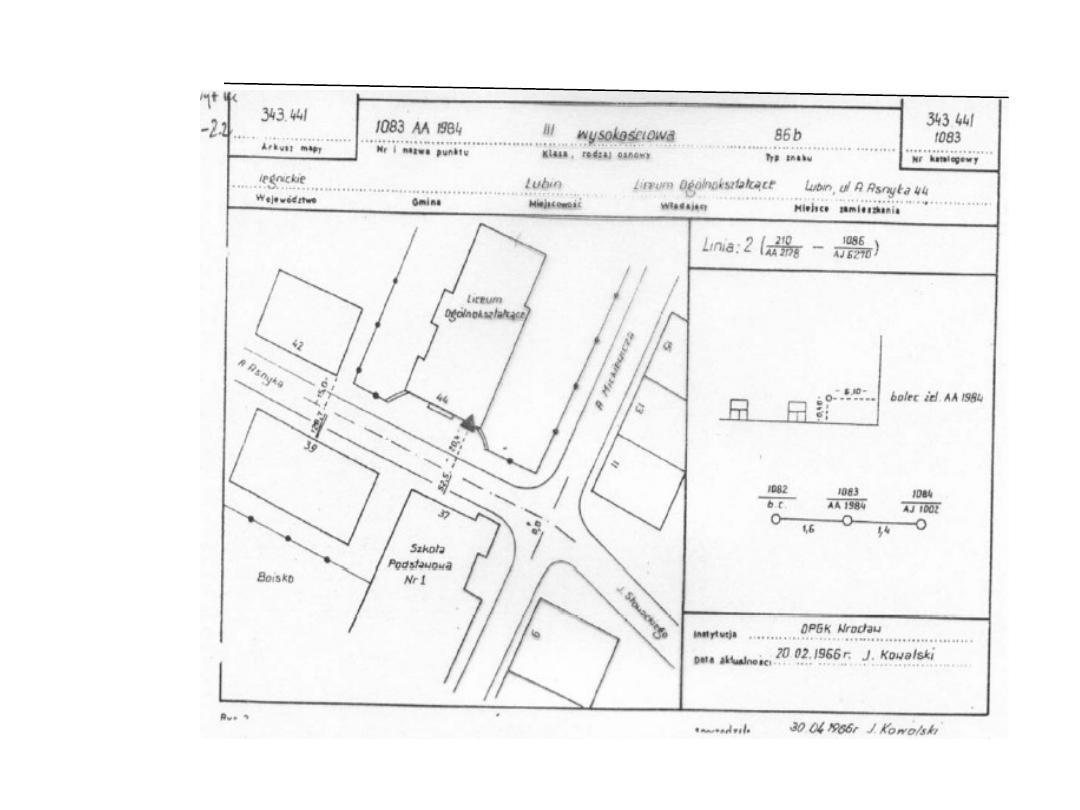
Opis topograficzny punktu osnowy wysokościowej
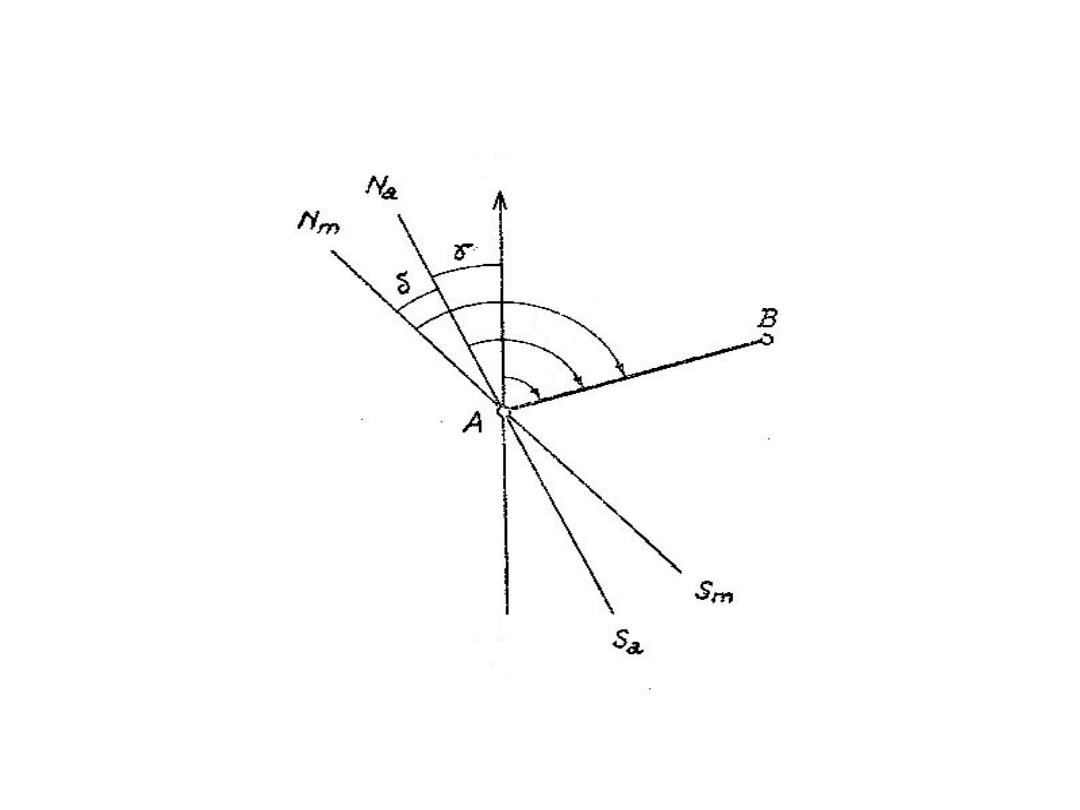
Definicje azymutów astronomicznego,
magnetycznego i topograficznego
A
m
=A
a
+
A
a
A
t
= A
a
-
A
a
-
astronomiczny,
A
m
–
magnetyczny,
A
t
-
topograficzny,
- deklinacja
magnetyczna
- zbieżność południków
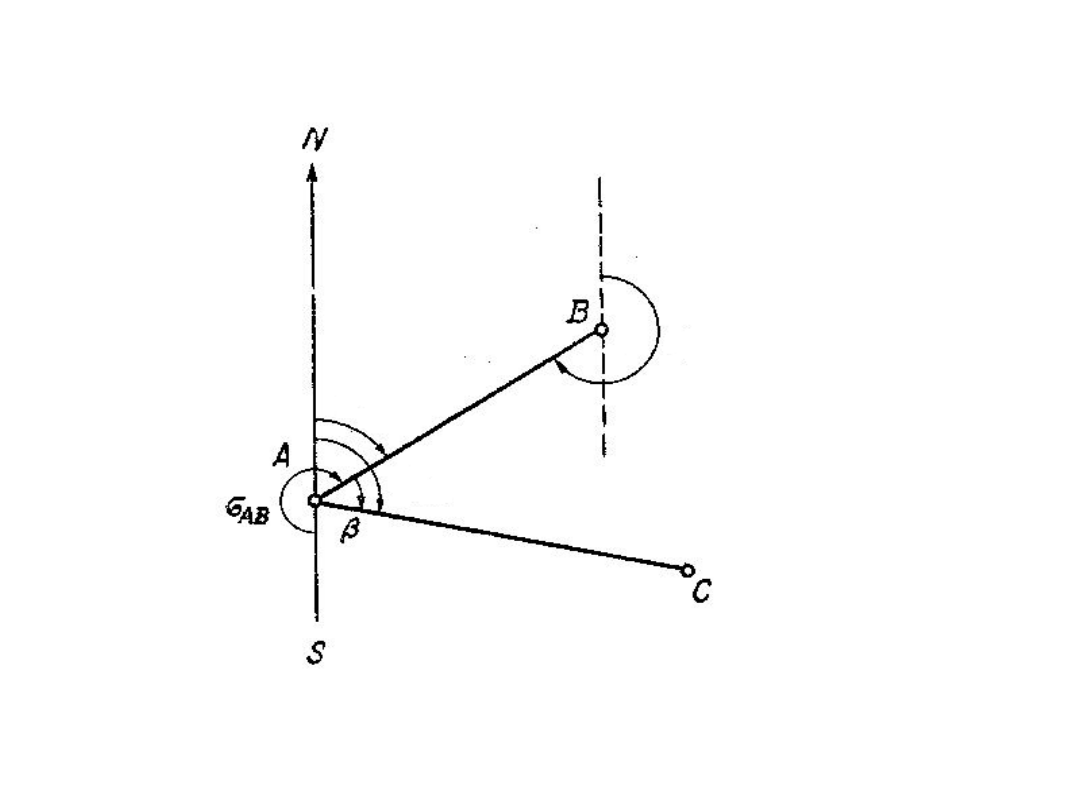
A
AB
A
BA
A
AB
= A
AB
+
X
Azymut
odwrotny:
A
BA
=
A
AB
+180
o
Azymut odcinka (topograficzny)

Zakładanie i uzupełnianie osnów geodezyjnych cd.
Azymut w układzie współrzędnych to
kąt poziomy
(analogia do kąta kierunkowego w geometrii E2)
zawarty między kierunkiem
osi OX
i kierunkiem
danego odcinka, liczony
zgodnie z ruchem
wskazówek zegara
{
0;360
o
}.
A
i,k
= arc tg(Y
i,k
/ X
i,k
) + R
R – składnik redukcji zależny od ćwiartki układu
współrzędnych:
(I – R=0; II R=; III R =; IV R=2).
I (X 0, Y 0); II (X <0, Y 0);
III (X <0, Y 0); IV (X >0, Y 0);
X
k
= X
i
+ X
i,k
= X
i
+ d
i,k
*cos(A
i,k
)
Y
k
= Y
i
+ Y
i,k
= Y
i
+ d
i,k
*sin(A
i,k
)
wcięcie kątowo-
liniowe
wcięcie kątowe
linie
pomiarowe
ciąg jednostronnie nawiązany w
pkt C
C
A
B
F
G
A,B-baza
wcięcia
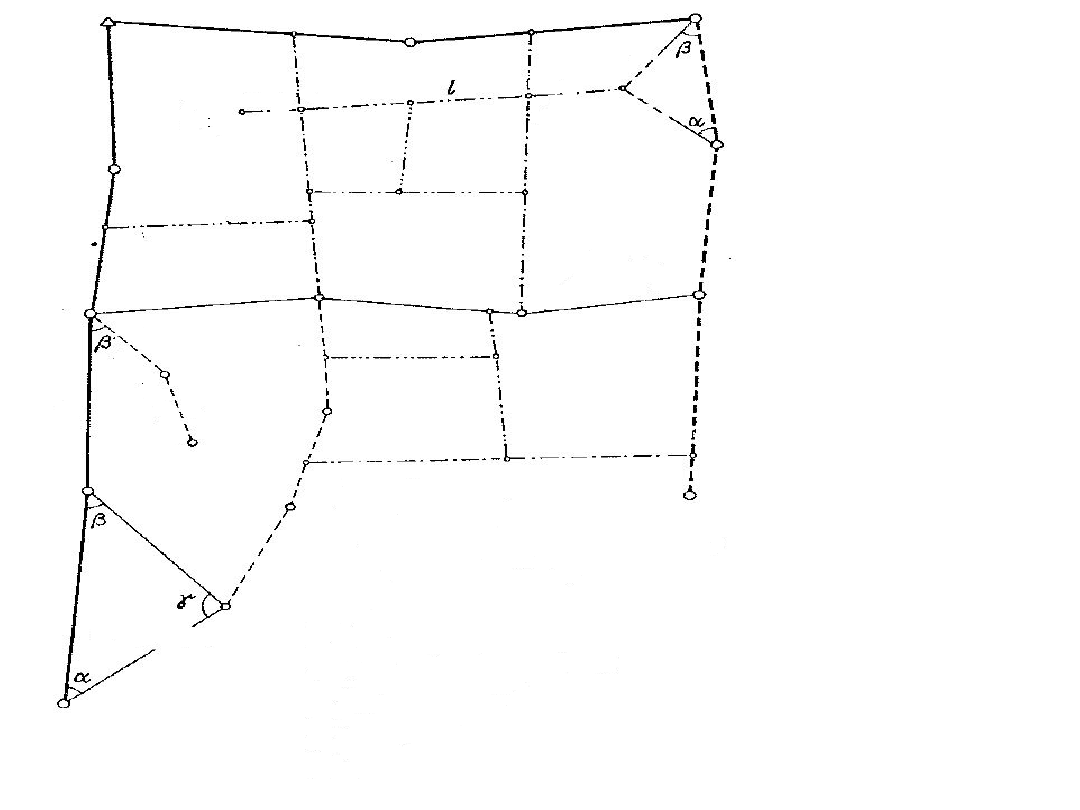
Sieć geodezyjna utworzona z powiązania punktów
osnowy.
- Kąty lewe, - kąty prawe, A,B – punkty
nawiązania
Kierunek
ciągu
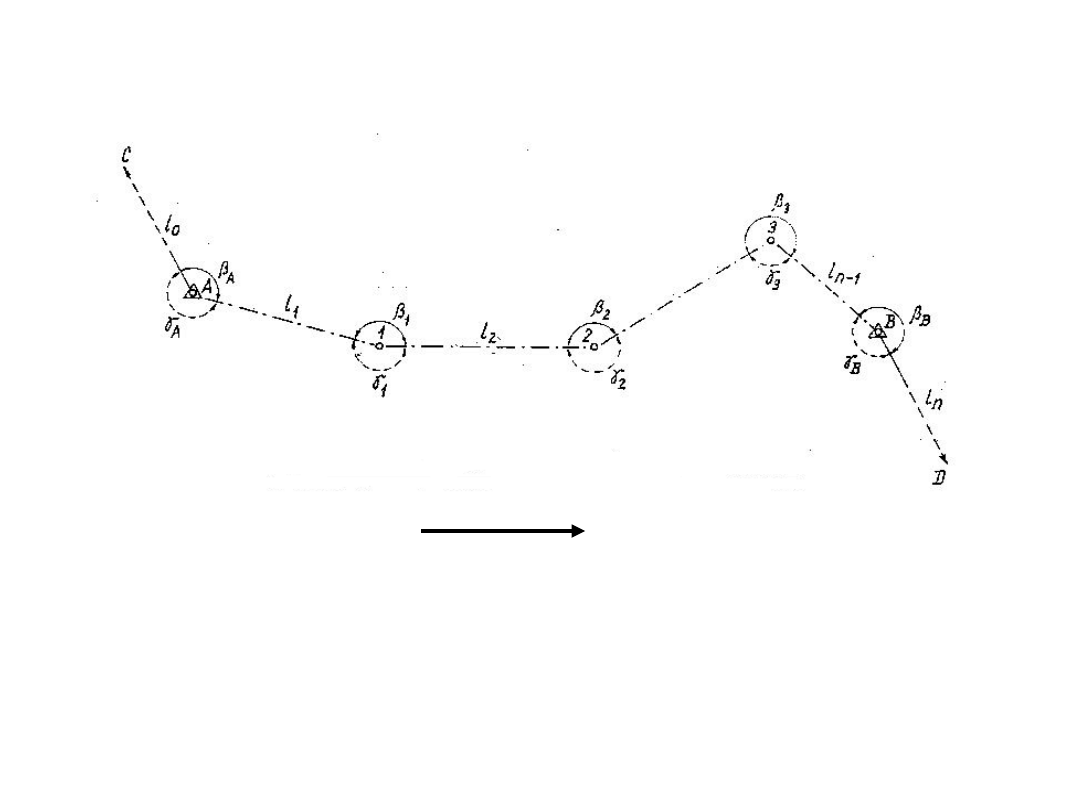
Ciąg poligonowy nawiązany
A
K
= A
P
+
i
- n 180
o
A
K
= A
P
-
i
+ n 180
o
Wyrównanie ciągów poligonowych
Wyrównanie ciągów poligonowych
1. Metoda ścisła (najmniejszych kwadratów)
2. Metoda
przybliżona
–
Ciągi zamknięte:
•
Wyrównanie kątów
•
Wyrównanie przyrostów
•
Obliczenie końcowych współrzędnych
n
i
prak
i
n
i
prak
i
n
i
teor
i
n
f
1
o
1
1
180
2
n
f
f
f
czy
n
m
f
o
v
2
max
max
Odchyłka
kątowa:

1
prak
1
w
1
2
prak
2
w
2
Obliczenie wyrównanych azymutów i przyrostów
wyr
i
o
w
1
i
w
i
180
A
A
wyr
i
o
w
1
i
w
i
180
A
A
Wyrównanie przyrostów
(warunek):
n
1
i
prak
i
y
n
1
i
prak
i
x
y
f
x
f
L
d
d
f
f
f
f
max
l
2
y
2
x
l
Obliczenie azymutów i przyrostów
współrzędnych:
X
i,k
= X
i
+ d
i,k
cos(A
i,k
) Y
i,k
= Y
i
+ d
i,k
*sin(A
i,k
)
0
y
0
x
n
1
i
i
n
1
i
i
X
k
= X
i
+ X
i,k
+ v
x
Y
k
= Y
i
+ Y
i,k
+ v
y
V
x
= - f
x
(d
i,k
/L)
, . . .
,
Odchyłki:

Pomiary sytuacyjne
Pomiar sytuacyjny to zespół
czynności
geodezyjnych
pozwalających na określenie
kształtu, wielkości i wzajemnego położenia
szczegółów terenowych.
W geodezji inżynieryjnej
każdy obiekt powierzchni Ziemi jest traktowany
jako
bryła lub figura geometryczna
o n
wierzchołkach. Figury te są poddawane
generalizacji kształtu
w stopniu zależnym od celu
prowadzonych pomiarów.
Najczęściej w pierwszym etapie dokonuje się
rzutowania punktów na geoidę
(powierzchnię
odniesienia). Stąd dążenie do redukowania
wszystkich wymiarów na płaszczyznę poziomą.
Pomiar wysokościowy to zespół czynności
geodezyjnych pozwalających na określenie
wysokości punktów
względem przyjętego układu
odniesienia i przedstawienia
form ukształtowania
terenu
.

Pomiary sytuacyjne
Norma wyróżnia 3 grupy szczegółów terenowych:
1)
I grupa
dokładności:
- stabilizowane znakami punkty osnowy
geodezyjnej.
- znaki graniczne, granice działek i punkty
załamania granic.
- obiekty i urządzenia techniczno-gospodarcze.
- elementy naziemne uzbrojenia terenu i studnie
- obiekty drogowe i kolejowe, szczegóły ulic.
2)
II grupa
:
- punkty załamania konturów budowli i urządzeń
poziemnych
- boiska sportowe, parki, drzewa
- elementy podziemne uzbrojenia terenu
3)
III grupa:
- punkty załamania konturów użytków gruntowych i
klasyfikacyjnych.
- złamania dróg dojazdowych, linie brzegowe wód.
- inne obiekty o niewyraźnych konturach.

Dokładność pomiarów wynikająca z generalizacji
kształtu.
Pomiar sytuacyjny
powinien być wykonywany
takimi metodami, które zapewnią, by
w odniesieniu
do osnowy
geodezyjnej błąd położenia punktów
obiektów pomiaru nie przekroczył wielkości:
0.10 ,
0.30 i 0.50 m dla kolejnych grup szczegółów
.
Pomiar wysokościowy
powinien być wykonywany z
błędem nie przekraczającym odpowiednio:
1mm ,
5mm i 10 mm dla odpowiednich grup
.
Norma dopuszcza
, by dokładności pomiaru
obiektów fakultatywnych
(będących przedmiotem
zainteresowania niektórych tylko branż) były
ustalane przez zamawiającego pomiar.

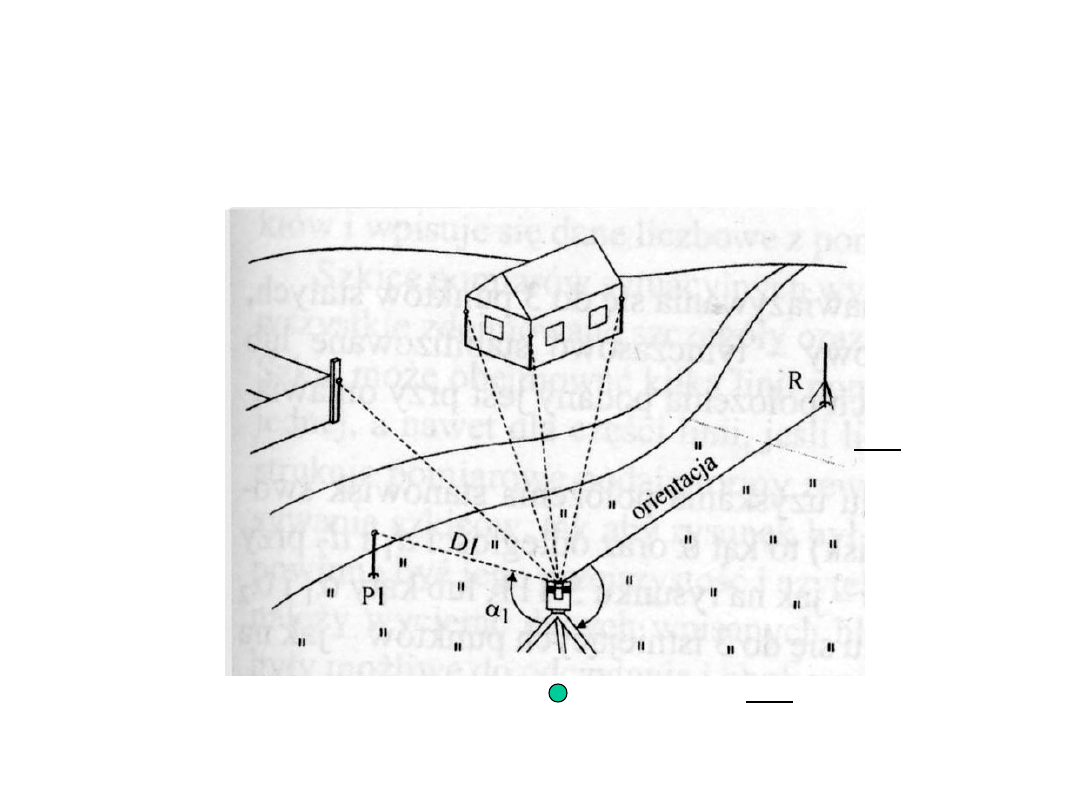
Metody pomiaru szczegółów terenowych:
1. Biegunowa
polega na pomiarze odległości od
stanowiska instrumentu do punktu celowania
oraz pomiarze kierunku przy pomocy teodolitu
lub stacji pomiarowej,
2. domiarów prostokątnych
(ortogonalna), polega
na pomiarze rzędnej i odciętej mierzonego
punktu sytuacyjnego względem linii, na którą
rzutuje się dany punkt przy pomocy węgielnicy.
3. przecięć kierunków
. W tej metodzie rejestruje
się miary w miejscach przecięcia konturu
sytuacyjnego z linią pomiarową. Można
zaprojektować specjaly układ linii pomiarowych
tak by zdjąc dużą ilość punktów przecięcia
4. przedłużeń
polega na przedłużaniu konturu
sytuacyjnego do przecięcia się z linią
pomiarową. Linia pomiarowa na którą przedłuża
się mierzone kontury sytuacyjne powinna być w
pobliżu przedłużanego konturu,

5.
wcięć kątowych i liniowych
,
-
wcięcie kątowe
polega na wyznaczeniu położenia
punktu na podstawie pomierzonych kątów w
stosunku do punktów o znanym położeniu (bazy
wcięcia). Na punktach bazy mierzy się kąty
poziome
-
wcięcie liniowe
polega na wyznaczeniu położenia
punktu na podstawie pomierzonych odległości
między wyznaczanym punktem, a punktami o
znanych współrzędnych (bazy wcięcia).
-
wcięcie kątowo - liniowe
jest to takie wcięcie, w
którym dla określenia położenia punktu
podlegają pomiarowi kąty i odległości w
punktach bazy wcięcia.
6.
fotogrametrii naziemnej
polega na
przetworzeniu danych zarejestrowanych na
zdjęciach fotograficznych kamerą
fotogrametryczną na punktach osnowy
geodezyjnej.

Przetworzenie danych fotogrametrycznych polega
na odczytaniu
współrzędnych tłowych
na zdjęciach
i
transformacji
do układu współrzędnych w
przyjętym układzie odniesienia.
7.
z użyciem technologii GPS.
Stanowisko: 2007
2008
4
2
4
4
4
0
41
1. Pomiary sytuacyjne metodą biegunową
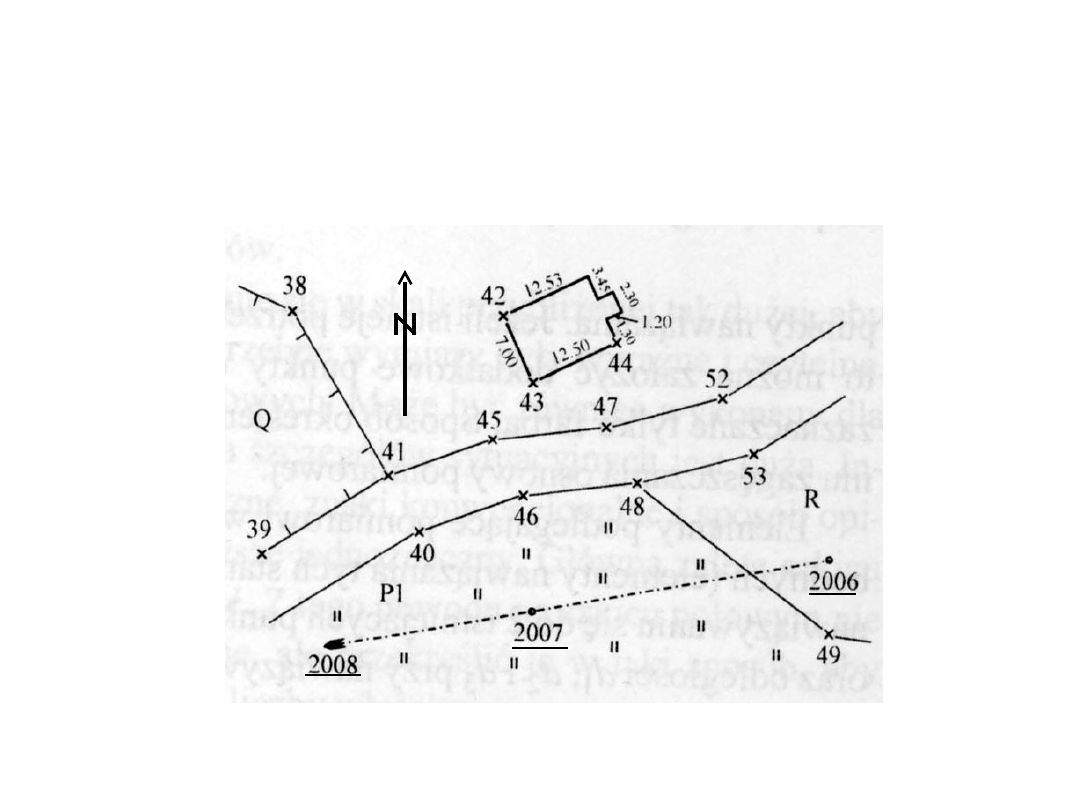
dr
g
Fragment szkicu polowego z pomiaru metodą biegunową
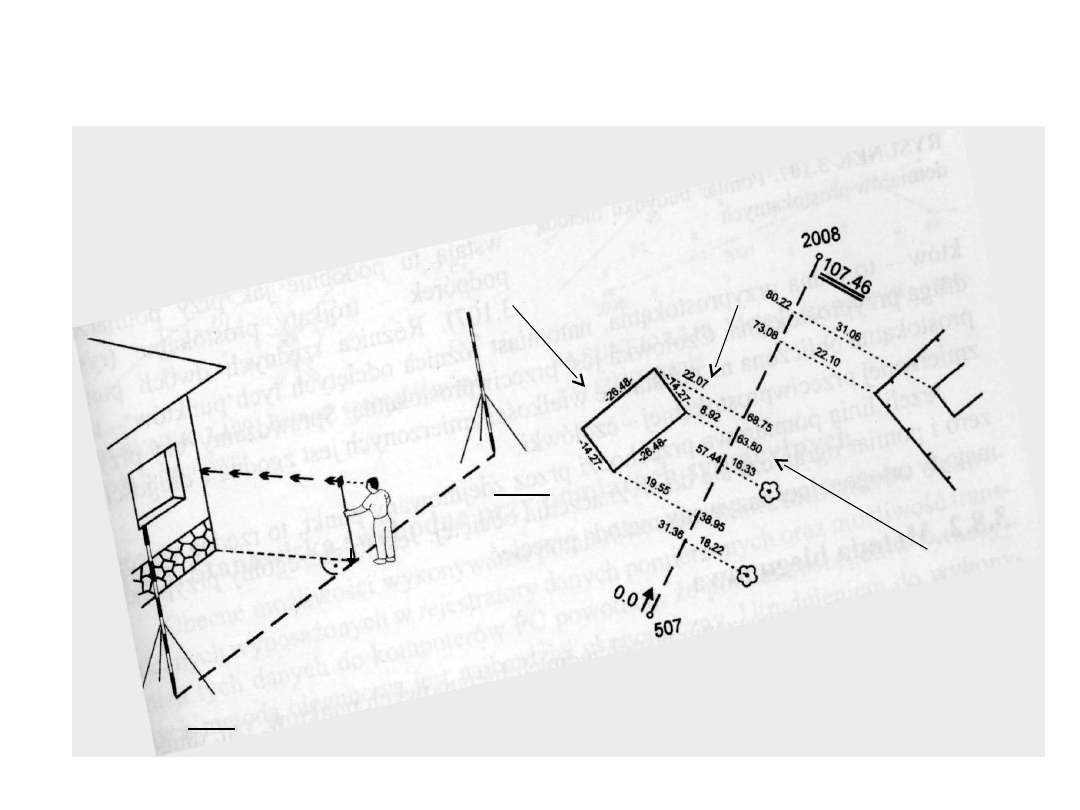
2. Pomiary sytuacyjne metodą ortogonalną (domiarów
prostokątnych)
węgielnic
a
50
7
2008
taś
ma
1
ruletk
a
mia
ra
bież
ąca
d
om
i
ar
cz
ołó
w
k
a
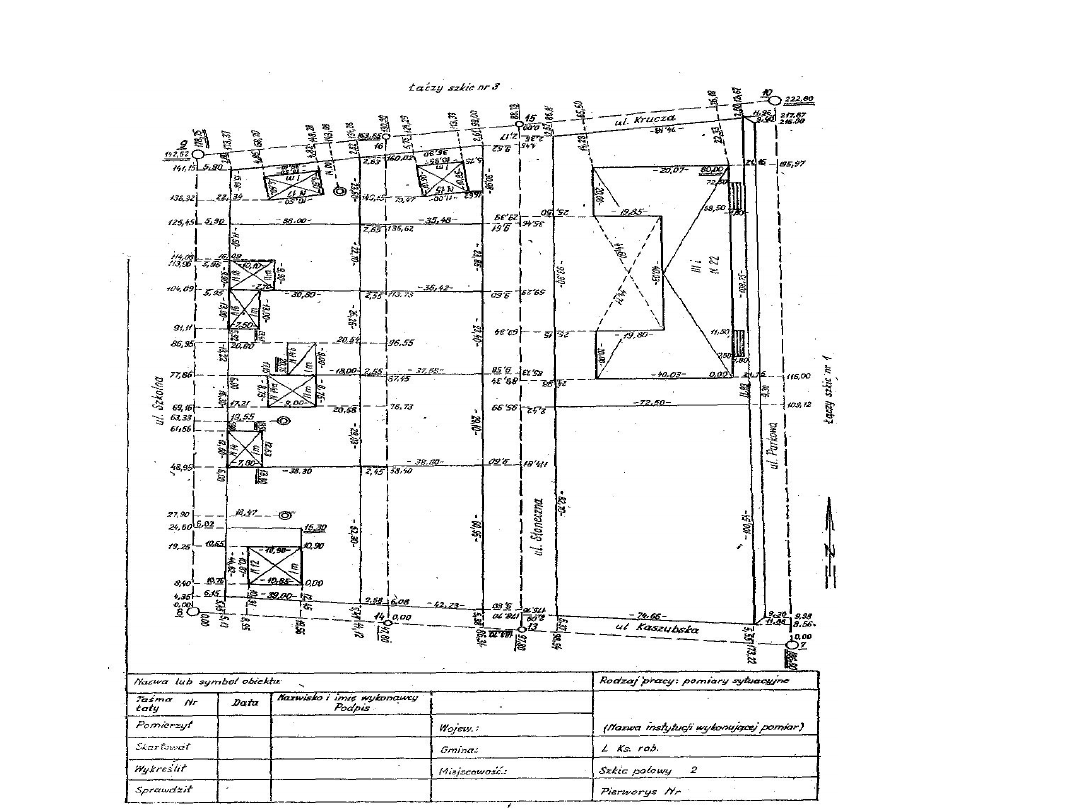
Fragment szkicu polowego
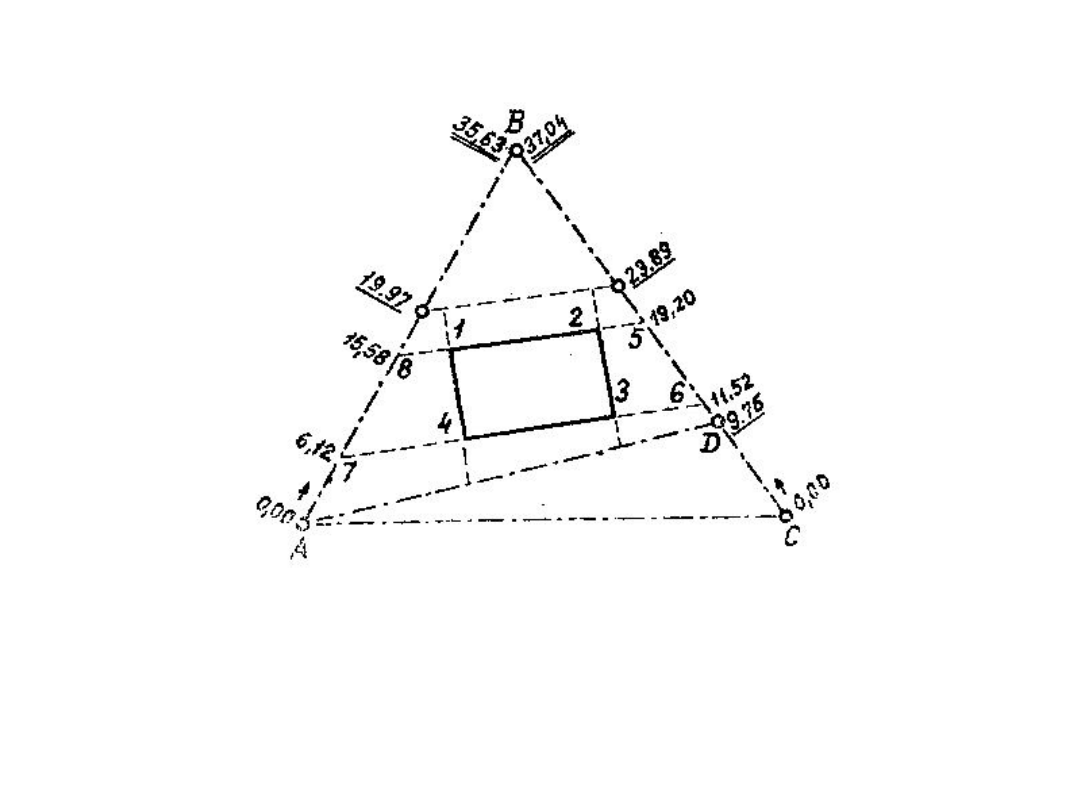
3. Metoda przedłużeń,
A,B,C,D – punkty osnowy pomiarowej
- 10.02
-
-
7
.5
0
-

Miary kontrolne
Miary kontrolne:
a) z drugiego, niezależnego wyznaczenia położenia
szczegółów,
b) miary
czołowe
(tzw. czołówki),
c) miary przeciwprostokątne (tzw.
podpórki
),
d) miary do punktów przecięcia się linii
pomiarowych z obiektami (szczegółami).
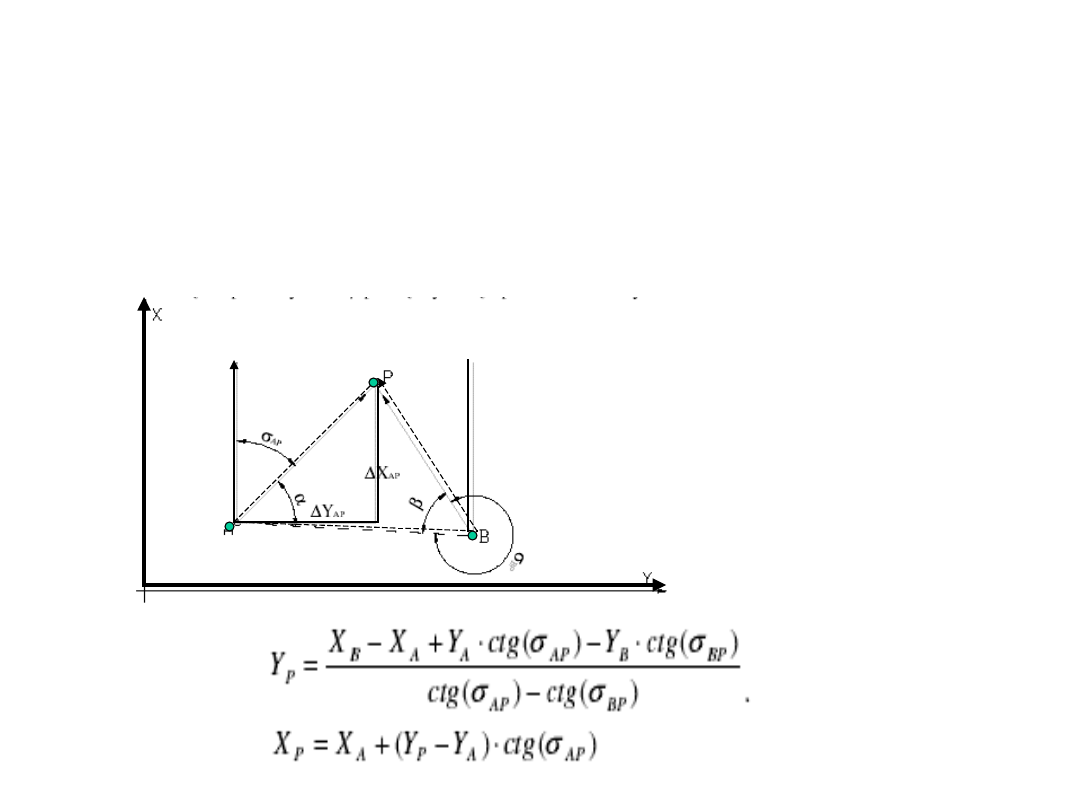
Kątowe wcięcie w przód
X
Y
A
P

Automatyzacja w procesie kartowania
Wyniki pomiarów sytuacyjno-wysokościowych wymagają
przetworzenia najczęściej do postaci zbióru danych do
tworzenia lub aktualizacji map.
Mapa cyfrowa
wektorowa
- powstaje poprzez skanowanie i
kalibrację map analogowych w układzie współrzędnych
państwowych a następnie ich
pełną wektoryzację
, z
podziałem na warstwy tematyczne.
Mapa cyfrowa
rastrowa
- powstaje poprzez
skanowanie i
kalibrację
map analogowych w układzie współrzędnych
państwowych.
Nie przeprowadza się wektoryzacji
obiektów.
Głównym zastosowaniem mapy rastrowej jest uzyskanie map
w innej skali niż materiały wyjściowe lub jednolitej mapy
powstałej z połączenia kilku sekcji map analogowych.
Mapa cyfrowa
hybrydowa
( rastrowo-wektorowa ) - jest to
najczęściej stosowana
mapa cyfrowa do celów projektowych
.
Powstaje analogicznie jak mapa rastrowa jednak
przeprowadza się wektoryzację lub aktualizację z danych
pomiarowych jej części zgodnie z zapotrzebowaniem
zleceniodawcy. Wektoryzowane mogą być np.: sieci
uzbrojenia terenu, granice działek, budynki lub całość
obiektów w danym interesującym nas zakresie.
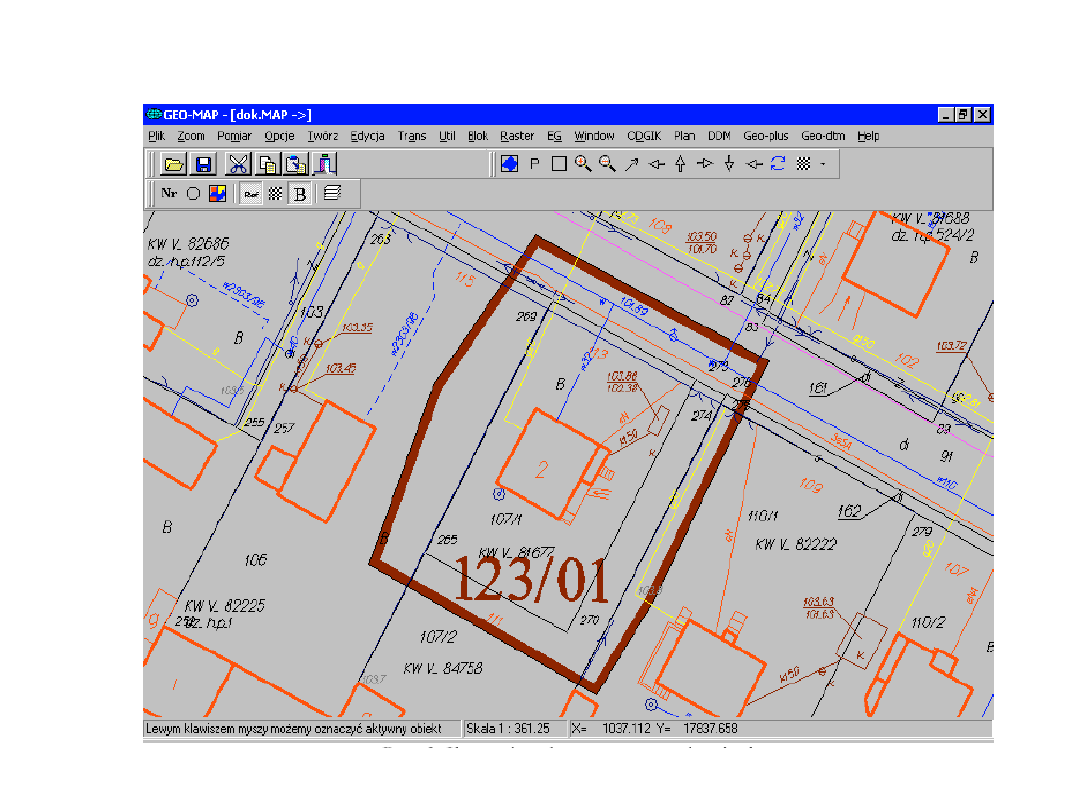
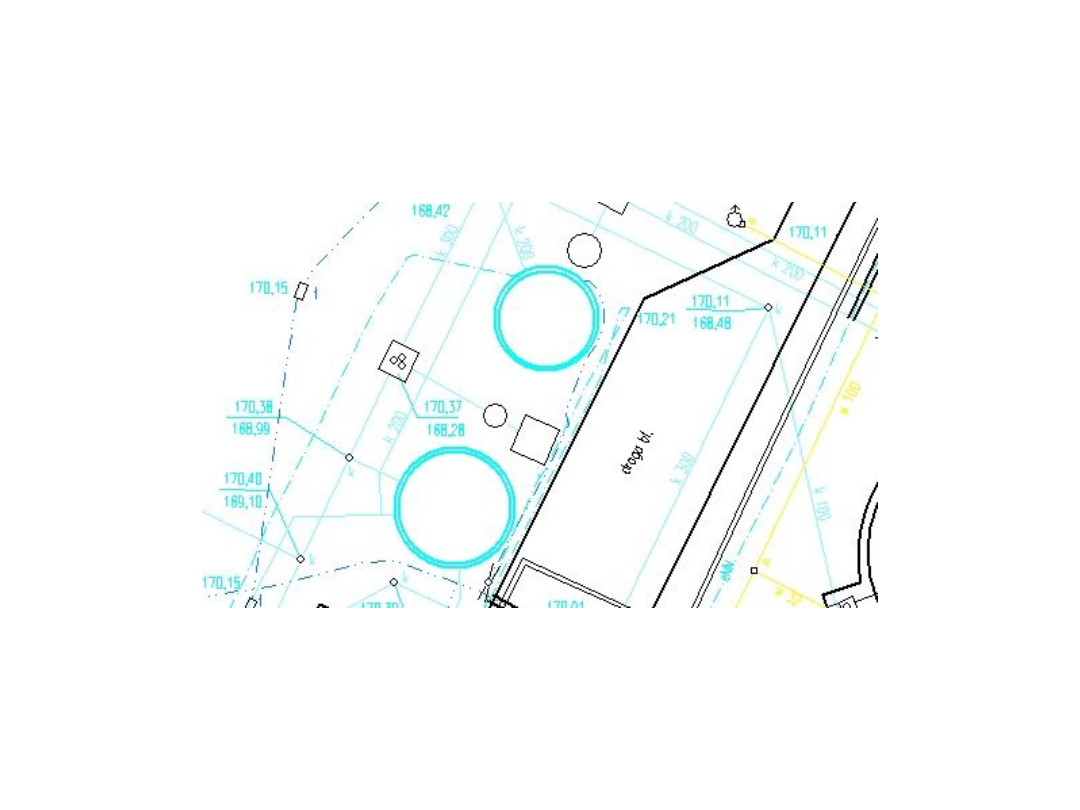
Mapa numeryczna wektorowa opracowana w
systemie GEO-MAP
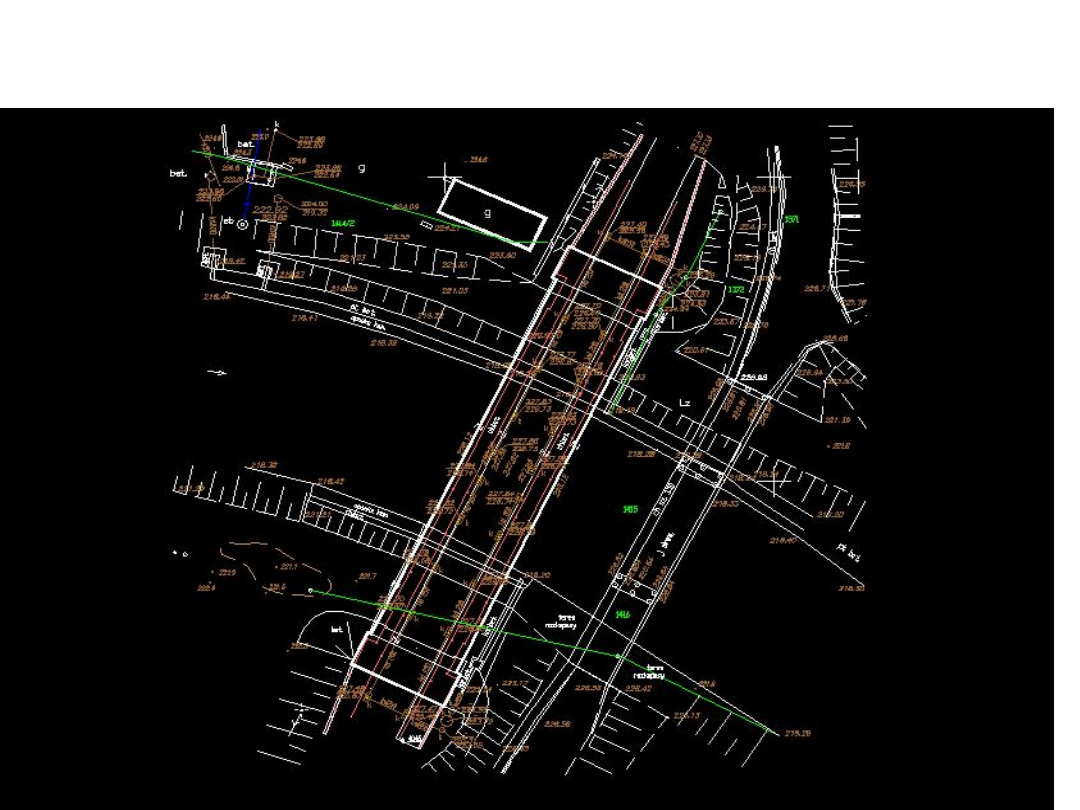
Mapa numeryczna wektorowa opracowana w
systemie AutoCad
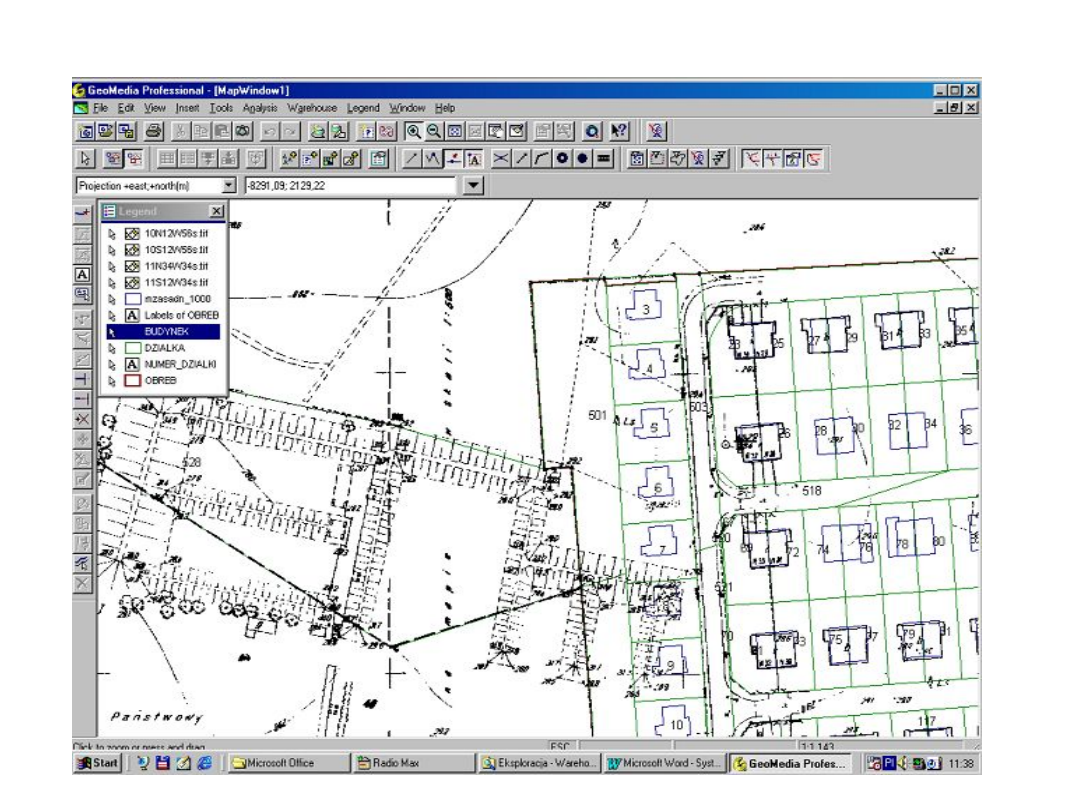
Mapa numeryczna opracowana pod kontrolą
systemu GEOMedia
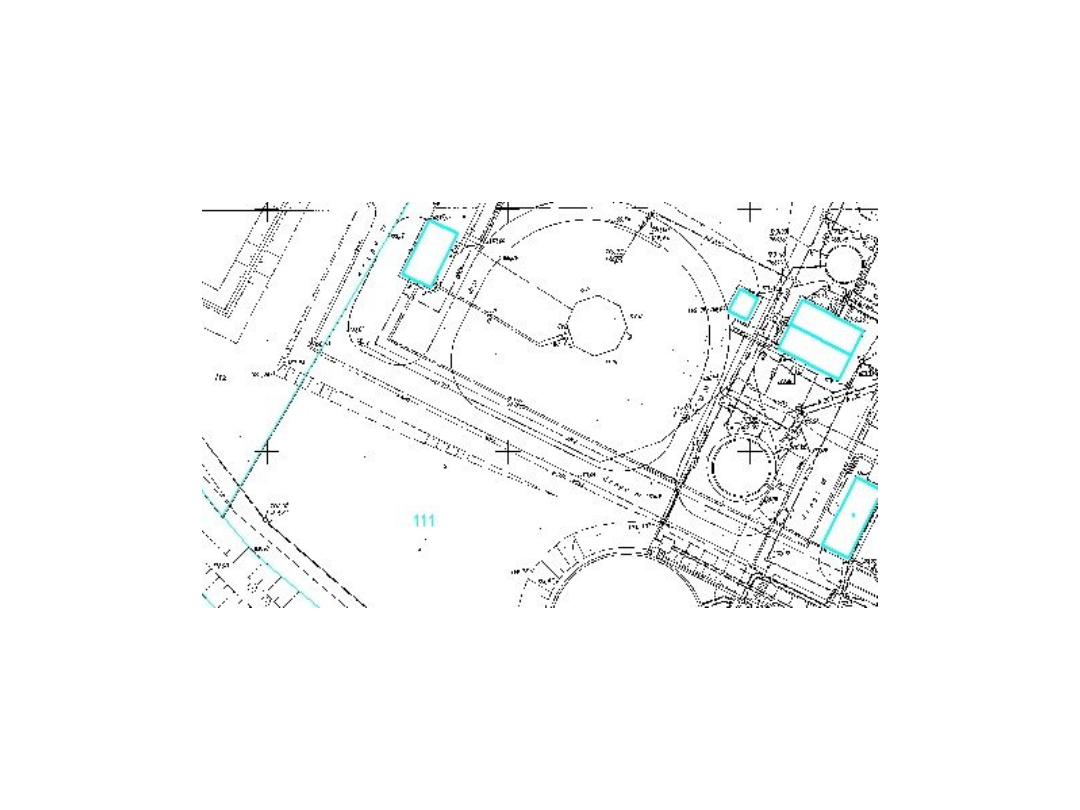
Fragment mapy rastrowej
Mapa wektorowa utworzona po wektoryzacji rastra

Ortofotomapa

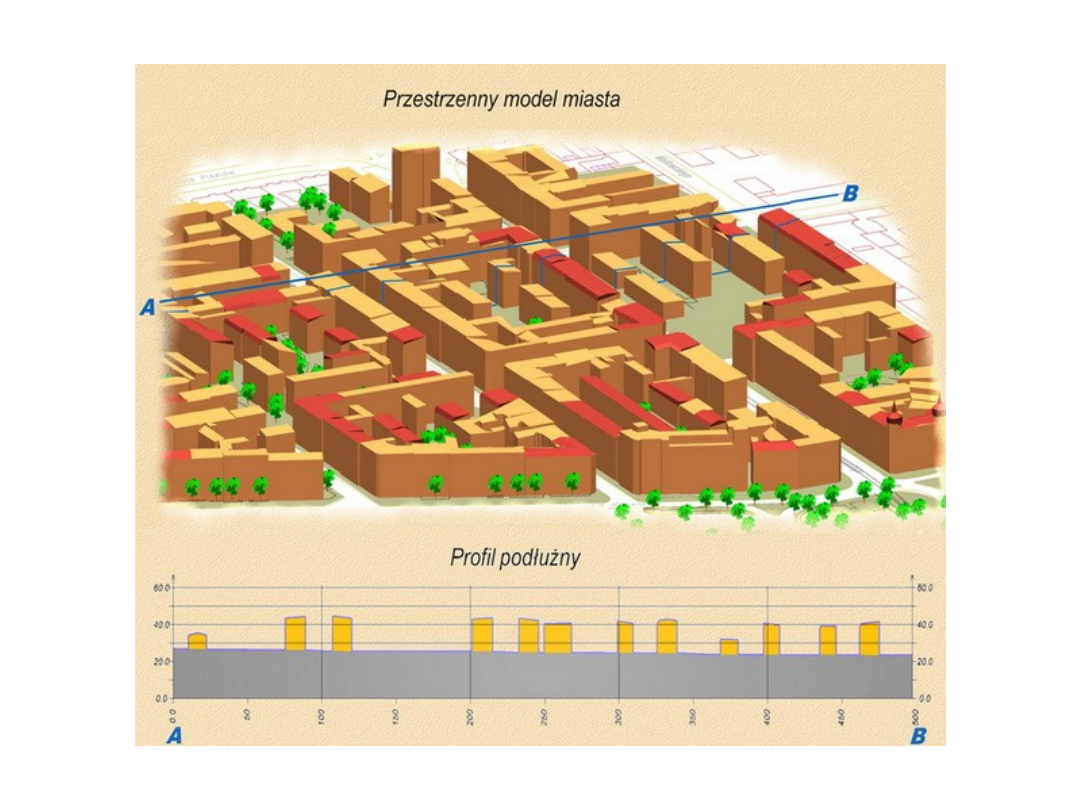
Numeryczny model terenu - NMT
(ang. Digital
Terrain Model) tworzy się w oparciu o
dane
wektorowe
z pomiarów fotogrametrycznych,
bezpośrednich pomiarów terenowych bądź w wyniku
wektoryzacji rzeźby terenu z istniejących map.
Utworzony model terenu pozwala na:
- automatyczne generowanie profili podłużnych i
poprzecznych,
- obliczanie objętości gruntu (robót ziemnych),
- tworzenie map warstwicowych,
- różnego rodzaju wizualizacje i analizy.
- wspomaga projektowanie dróg, melioracji czy
przewidywania zasięgu i skutków powodzi.
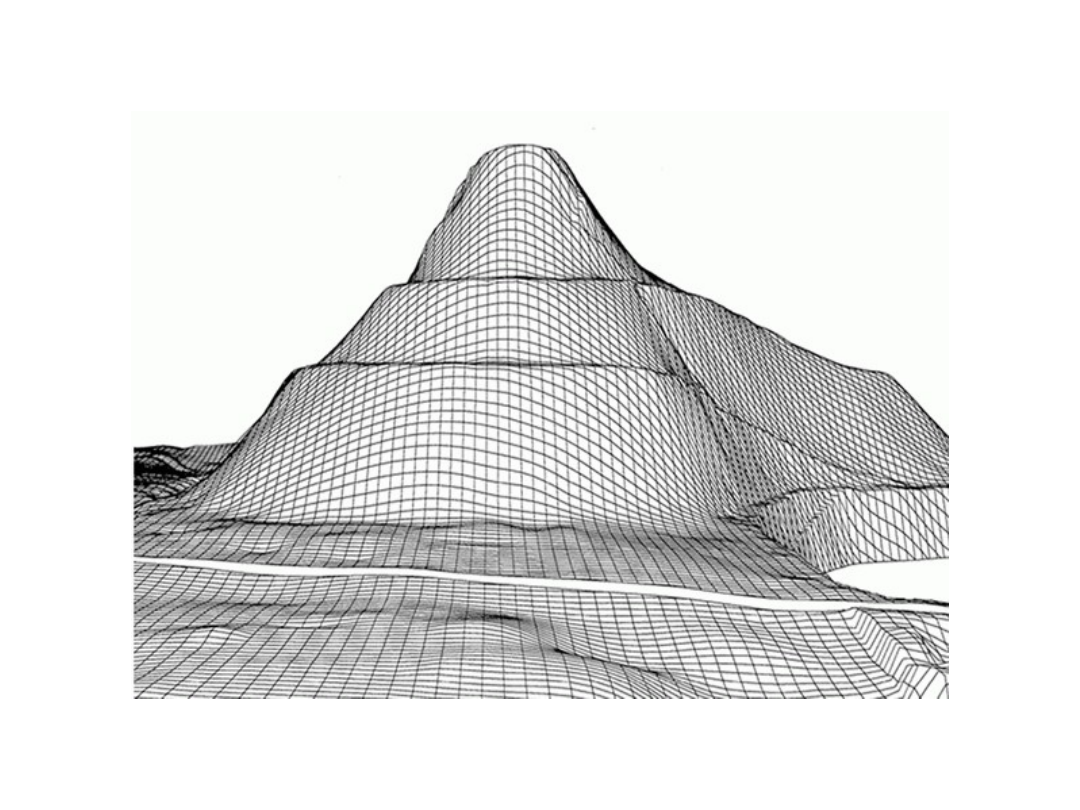
DEM - Digital Elevation Model to trójwymiarowy
model zbudowany na podstawie zbiorów danych
przestrzennych przy wykorzystaniu algorytmów
aproksymujących. NMT najczęściej oznacza
trójwymiarowy model rzeźby terenu
.
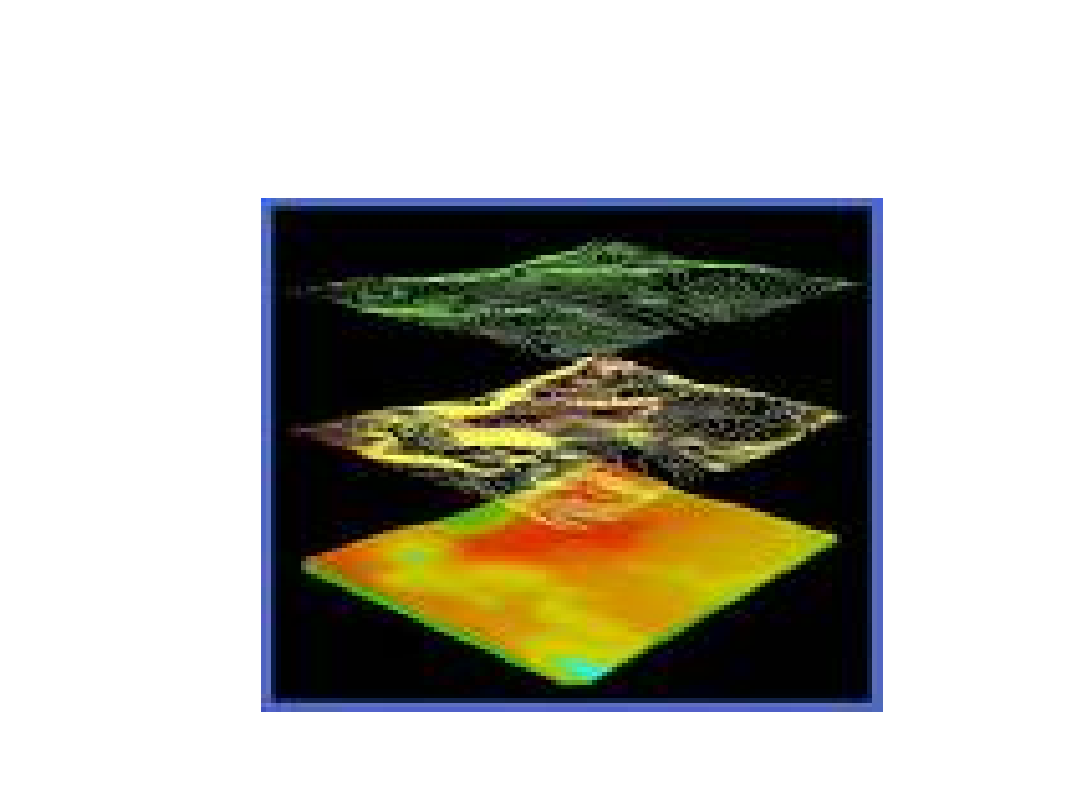
Interpretacja tworzenia modelu terenu

Numeryczny model terenu - NMT
Numeryczny model terenu - (hałda)
Model obiektu – pryzma węgla

Technika GPS - tryb Real-Time Kinematic
Globalny system pomiarów
satelitarnych
GPS bazuje na
określaniu przestrzennych współrzędnych położenia
anteny odbierającej sygnały emitowane przez układ
satelitów poruszających się po określonych orbitach,
Współrzędne GPS wyznaczane są w
geocentrycznym
układzie XYZ
zdefiniowanym przez środek masy i oś
obrotu Ziemi.
Tryb pomiaru Real -Time Kinematic, to bezpośredni
pomiar kinematyczny, w odróżnieniu od pomiarów
stacjonarnych. Bezpośredni - dający wyniki w momencie
pomiaru (z opóźnieniem najwyżej kilkusekundowym). Taki
pomiar jest możliwy dzięki współpracy
dwóch odbiorników
GPS
, z których jeden pozostaje nieruchomy przez cały
czas trwania sesji pomiarowej, podczas gdy drugi
przemieszczany jest tak, aby objąć wszystkie punkty
wybrane do pomiaru.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
Wyszukiwarka
Podobne podstrony:
10 Pomiary szczegolow sytuacyjnych
Pomiar szczegółów sytuacyjnych metodą ortogonalną, uczelnia, BL, Geodezja, zagadnienia z geodezji
Metody pomiaru szczegółów terenowych, Semestr 2, GEODEZJA II
pomiar szczegółów
pomiary szczeg
STER 3 3 0 pomiary?ne szczegol
5 Podstawowe metody pomiarów szczegółów sytuacyjnych
Pomiar szczegółów metodą biegunową
Metody pomiarow szczegolow sytuacyjno wysokosciowych
Elektronika gotowe Różne metody pomiaru częstości drgań elektrycznych szczegó
2 Jakie szczegóły terenowe objęte krajowym systemem informacji o terenie zaliczamy do I grupy dokła
ćw OBLICZANIE WSPÓŁRZĘDNYCH PUNKTÓW POMIAROWEJ OSNOWY SYTUACYJNEJ I SZCZEGÓŁÓW TERENOWYCH
proj OBLICZANIE WSPÓŁRZĘDNYCH PUNKTÓW POMIAROWEJ OSNOWY SYTUACYJNEJ I SZCZEGÓŁÓW TERENOWYCHx
11 Projektowanie, pomiar i wyrównanie szczegółowej osnowy
download Zarządzanie Produkcja Archiwum w 09 pomiar pracy [ www potrzebujegotowki pl ]
więcej podobnych podstron