1. Błąd bezwzględny x jest to różnica między wartością zmierzoną a rzeczywistą;
x = x - xr
x - wartość zmierzona,
xr - wartość rzeczywista.
Wartość rzeczywista jest w praktyce niewyznaczalna. W rachunku błędów są stosowane wartości poprawne.
2. Błąd bezwzględny graniczny xgr określa przedział liczbowy, wewnątrz którego mieszczą się wszystkie błędy, obejmujący wartość poprawną lub wartości poprawne wyznaczone z modelu matematycznego wzorca (model matematyczny wzorca może być dowolną funkcją i jest etalonem, zbiorem wartości wzorcowych tego pomiaru);
xgr=xppi max
lub dla serii pomiarów obejmujący wartość średnią ![]()
;
![]()
gr=![]()
i max
w którym z dużym prawdopodobieństwem mieści się wartość rzeczywista.
3. Podaj definicję błędu względnego.
Błąd względny dx jest to stosunek błędu bezwzględnego do wartości rzeczywistej:
![]()
ponieważ wartość rzeczywista nie jest znana, zamiast jej do obliczeń wykorzystuje się wartość
najbardziej zbliżoną, w ostateczności również wartość mierzoną.
4. Co nazywamy klasą przyrządu.
Jest to umowne oznaczenie zasadniczych właściwości narzędzia pomiarowego, a zwłaszcza
jego dokładności.. Najczęściej oznacza odpowiednio zdefiniowany dopuszczalny błąd
podstawowy narzędzia.
5. Pomiarem wielkości x nazywamy doświadczalne wyznaczenie jej wartości liczbowej w obranym układzie jednostek.
6. 7. Podział błędów ze względu na ich zmienność w funkcji wartości mierzonej:
· błędy addytywne, których wartość bezwzględna nie zależy od wartości wielkości mierzonej, są to błędy graniczne (w błędach przypadkowych) oraz błędy systematyczne uznane za graniczne dla wygody pomiaru,
· błędy multiplikatywne, ich wartość bezwzględna rośnie proporcjonalnie do wartości mierzonej, powstają one w tym miejscu, gdzie jest realizowana na sygnale operacja o charakterze multiplikatywnym w celu kondycjonowania, przetworzenia sygnału, wykonania operacji matematycznej w procesorach według algorytmu (różniczkowanie, całkowanie).
7. Błędy addytywne.
Są to takie błędy, których wartość bezwzględna jest stała, niezależna od wartości wielkości mierzonej. Stałość wartości tego błędu wynika z przyjętego rozwiązania technicznego, np. błędy dyskretyzacji w cyfrowych polach odczytowych, w przetwornikach analogowo-cyfrowych, w metodzie zaokrągleń w jednostkach arytmetycznych itp., lub z przyjętych definicji błędu dla danych przetworników, np. błąd bezwzględny graniczny w przyrządach analogowych, w oscyloskopie (błędy związane z nieliniowością odchylania, ze zmianami temperatury), czyli tam gdzie nie jest sensowne podanie wartości błędów w każdym punkcie skali, powierzchni ekranu czy dla każdej temperatury otoczenia z uwzględnieniem warunków, wartości i kierunku przepływu strug powietrza, w jakich ma znajdować się przyrząd.
8. Pojęcie - wartość średnia.
x = 1/nxi
n - liczba wyników pomiaru danej wielkości,
xi - kolejna wartość z pomiaru wielkości x.
9. Podaj wzór na odchylenie standardowe.
10. Podaj wzór na odchylenie standardowe wartości średniej.
11. Wartość poprawna xp to wielkość umownie prawdziwa. Z punktu widzenia celu, do którego wartość ta jest potrzebna, różnicę między wartością poprawną a rzeczywistą można pominąć. Wartość poprawna jest znana w postaci liczbowej, zastępuje nie znaną wartość rzeczywistą w praktycznym wyznaczeniu błędu pomiaru, odtworzenia lub przetwarzania. Wartość poprawną odtwarza się lub wyznacza za pomocą metod i przyrządów o dokładności odpowiadającej danej sytuacji. Błąd graniczny pomiaru lub odtworzenia wartości poprawnej powinien być pomijalny wobec błędu granicznego badanego aktu (pomiar, odtworzenia itd.).
12. Wielkość rzeczywista (prawdziwa) xr jest to wartość, która charakteryzuje wielkość doskonale zdefiniowaną w warunkach, gdy wartość ta jest badana. Wartość rzeczywista jest pojęciem idealnym i nie może być znana, jej istnienie pozostaje hipotezą.
13. Błąd bezwzględny poprawny xpp jest różnicą pomiędzy wartością zmierzoną a wartością poprawną;
xpp=x-xpp
Błąd bezwzględny poprawny dla i-tego pomiaru xppi jest różnicą pomiędzy i-tą wartością zmierzoną a i-tą wartością poprawną;
xppi=xi-xppi
14. Podaj definicję błędu odchylenia pozornego.
Błąd odchylenia pozornego xi, tzw. błąd bezwzględny pojedynczego pomiaru dla wartości średniej, jest różnicą pomiędzy wartością zmierzoną pojedynczego pomiaru a wartością średnią danej serii pomiarów
xi - i-ta wartość mierzona w serii n pomiarów,
![]()
i- wartość średnia n pomiarów,
![]()
- odchylenia pozorne i-tego pomiaru od wartości średniej.
16. Podaj błędy występujące w pomiarze rezystancji przyrządem analogowym.
Dla pomiaru rezystancji miernikiem elektromagnetycznym:
17. Opisz rozkład Gaussa.
Błędy przypadkowe opisuje się przez podanie prawdopodobieństwa, z jakim błąd x przyjmuje określoną wartość. Zakłada się, że prawdopodobieństwo to może być opisane za pomocą równania
x - błąd bezwzględny rzeczywisty,
a, b - granice zmienności przedziału x,
f(x) - funkcja gęstości rozkładu błędów pomiaru wielkości x.
Zakłada się, że błędy te mają następujące właściwości:
- wartości błędów bezwzględnych równych co do modułu są jednakowo prawdopodobne,
- małe wartości modułów błędów bezwzględnych są bardziej prawdopodobne niż duże,
- prawdopodobieństwo wystąpienia wartości błędu bezwzględnego większego co do modułu od pewnej określonej liczby jest prawie równe zeru,
- powierzchnia pod funkcją prawdopodobieństw rozkładu błędów jest równa 1,
- w praktyce pomiarowej, przy dużej liczbie powtórzeń (ponad 20), dodaje się do tych właściwości postulat Gaussa, który brzmi: "funkcja gęstości rozkładu błędów ma rozkład normalny";
(funkcja wyników pomiarów też ma rozkład normalny),
2 - wariancja,
n - liczba pomiarów,
- odchylenie standardowe (średnie) jest miarą niedokładności pomiarów, dla małych wartości krzywa Gaussa jest wąska, co oznacza, że prawdopodobieństwo występowania dużych błędów jest małe;
![]()
Prawdopodobieństwo, że wartość błędu bezwzględnego nie przekracza wartości;
![]()
kp - liczba rzeczywista;
![]()
zwiększa się ze wzrostem k;
W pomiarach mało dokładnych przyjmuje się, że prawdopodobieństwo p = 0,95 jest wystarczająco bliskie jedności, wówczas błąd graniczny każdego pomiaru serii
Średnia arytmetyczna musi mieć też odchylenie standardowe, ponieważ wartość średnia nie jest równa wartości rzeczywistej;
![]()
Współczynnik ten nosi nazwę odchylenia standardowego wartości średniej, jest on miarą rozproszenia wartości pomiarowych wokół wartości średniej. Błąd graniczny, jakim obarczona jest wartość średnia, obliczamy ze wzoru:
18. Opisz rozkład Studenta.
Podczas wykonywania pomiarów o mniejszej liczbie powtórzeń (około 20 lub mniej), przyjmuje się, że funkcja rozkładu błędów ma rozkład t Studenta.
Teoria pozwala wyciągnąć wnioski dotyczące parametrów całej populacji o zbliżonym stopniu pewności, jak wnioski uzyskiwane z bardzo dużej liczby pomiarów. Wykazał on, że przedział ufności w którym znajduje się wartość rzeczywista, można wyrazić przez wartość odchylenia standardowego wartości mierzonej z próby. 
lub przez wartość odchylenia standardowego wartości średniej z próby;
Wartości odchylenia standardowego oblicza się ze wzorów podanych dla rozkładu normalnego, które po przekształceniu są następujące:
19. Podaj błędy dla przyrządów analogowych występujące przy pomiarze pojemności kondensatora metodą techniczną.
Błędy dla przyrządów analogowych (woltomierz, amperomierz, miernik częstotliwości) są bezpośrednio związane z klasami dokładności przyrządów stosowanych przy pomiarze.
20. Podaj błędy dla przyrządów cyfrowych występujące przy pomiarze pojemności kondensatora metodą techniczną.
Błędy dla przyrządów cyfrowych (woltomierz, amperomierz, miernik częstotliwości) są wynikiem istnienia charakterystycznych dla każdego przyrządu błędów analogowych i dyskretyzacji:
21. Podaj błędy dla przyrządów analogowych występujące przy pomiarze indukcyjności cewki metodą techniczną.
To samo co w punkcie 19.
22. Podaj błędy dla przyrządów cyfrowych występujące przy pomiarze indukcyjności cewki metodą techniczną.
To samo co w punkcie 20.
23. Podaj definicję błędu granicznego.
Błąd graniczny to granice niepewności określone z prawdopodobieństwem P = 0,99728, czyli
![]()
.
24. Podaj definicję błędu prawdopodobnego.
Błąd prawdopodobne to granice niepewności określone z prawdopodobieństwem P = 0,5, czyli
![]()
.
25.Błąd średni kwadratowy:
s=
![]()
-błąd przypadkowy poszczególnych pomiarów serii
26.Odchylenie standardowe pojedynczego wyniku w rozkładzie t:
y - wielkość obliczona pośrednio y=f(x1,x2,...xi)
xe- e-ta wielkość mierzona bezpośrednio
se- odchylenie standardowe wartości e-tej wielkości wyznaczonej bezpośrednio
27.Błąd bezwzględny pojedynczego wyniku :
tn,p- współczynnik STUDENTA przy liczbie powtórzeń n ,przyjętym poziomie ufności p. dla wielkości xe
28.Odchylenie standardowe wartości pośredniej dla wartości średnich w rozkładzie t:
![]()
odchylenie standardowe wartości średniej wielkości ![]()
29.Błąd wartości średniej rozkładu studenta:
30. Błąd bezwzględny wartości średniej rozkładu studenta w pomiarze pośrednim:
spj - odchylenie standardowe wartości pośredniej.
31.Pomiar pośredni jest to pomiar, którego wartość końcowa stanowi wynik obliczeń jakiegoś wyrażenia algebraicznego. Wartości poszczególnych wyrazów wyrażenia są wynikami pomiarów bezpośrednich, uzyskiwanych
w jednym cyklu pomiarowym.
32.Odchylenie standardowe każdego wyniku z obliczeń dla i-tego zestawu pomiaru:
33.Odchylenie standardowe wartości pośredniej dla wartości średnich:
34.Błąd bezwzględny dla wartości średnich:
35.Błąd gruby jest to błąd wynikający z nieprawidłowego wykonania pomiaru lub niesprawności narzędzia pomiarowego . Wynika z omyłkowego odczytania wskazania ,z zastosowania przyrządu uszkodzonego lub niewłaściwego. Dyskwalifikuje całkowicie wynik pomiaru.
36.Kryterium błędów grubych:
![]()
![]()
xg- wynik przypuszczalnie obarczony błędem grubym
kp,n- współczynnik kp,n=f(n,p)
s- odchylenie standardowe obliczone bez błędu grubego
37. Błędy multiplikatywne.
Błędy multiplikatywne, są to takie błędy, których wartość bezwzględna rośnie proporcjonalnie do wartości wielkości mierzonej.
38. Błędy addytywne.
Błędy addytywne, są to takie błędy, których wartość bezwzględna jest stała, niezależna od wartości wielkości mierzonej.
39. Narysuj wykres porównawczy rozkładu Gaussa z rozkładem Studenta
Rozkład Studenta dla małych serii pomiarów.
S - Student
G - Gauss
40. Podaj pierwszą regułę zaokrąglania błędów
Wyznaczane wartości nie mają żadnego wpływu na szeroko rozumianą ekonomię (rozliczenia, płatność, ilość, jakość) można stosować zaokrąglenia według reguły pierwszej, w najgorszym przypadku niedokładność wyznaczenia błędu wynosi 25%.
Reguła:
- jeżeli pierwsza cyfra liczby jest mniejsza od 5, zaokrągla się ją do dwóch cyfr znaczących,,
- jeżeli pierwsza cyfra liczby jest równa lub większa od 5, zaokrągla się ją do jednej cyfry znaczącej,
- jako zaokrąglenie przyjmuje się liczbę najbliższą, nie mniejszą od zaokrąglanej (zaokrąglenie w górę).
Reguła dotyczy wartości względnych i bezwzględnych.
41. Podaj drugą regułę zaokrąglania błędów.
Wyznaczane wartości mają znaczenie ekonomiczne, należy wyznaczyć związek błędu z najmniejszą obowiązującą jednostką monetarną i z taką dokładnością wyznaczać błędy.
Reguła:
-- błędy bezwzględne:
- wyznaczyć wartość wielkości mierzonej odpowiadającej jednostce monetarnej, należy ją zaokrąglić do najbliższej liczby jednocyfrowej nie większej od zaokrąglanej (zaokrąglanie w dół) i przyjąć ją za niedokładność wyznaczania wartości błędu bezwzględnego,
-- błędy względne
- obliczyć wartość względną przyjętej jednostki monetarnej dla danej wartości oraz zaokrąglić ją do najbliższej liczby jednocyfrowej niewiększej od zaokrąglanej (zaokrąglanie w dół) i przyjąć ją za niedokładność wyznaczania wartości błędu względnego.
42. Czym różni się rozkład Studenta od rozkładu Gaussa.
Dla małej serii pomiarów ( n=2..20) rozkład gęstości prawdopodobieństwa nie odpowiada rozkładowi normalnemu Gaussa. W takich przypadkach stosuje się inne przykłady, np. rozkład Studenta którego postać graficzna jest mniej stroma i wolniej zbliża się do osi odciętych od krzywej Gaussa. Wtych przypadkach do obliczenia niepewności pomiaru stosuje się (zamiast 3 lub 2/3) mnożnik t o wartości określonej tabelarycznie w zależności od liczby pomiarów i przyjętego prawdopodobieństwa.
43. Co to są błędy systematyczne.
Błąd systematyczny nie wpływa na zmianę wyniku, gdy powtarza się pomiar tej samej wartości tą samą metodą i w tych samych warunkach, ponieważ jest stały co do wartości bezwzględnej i co do znaku. W przypadku zmiany warunków pomiaru błąd systematyczny może zmieniać się ale według znanej dla danej metody zależności. Najczęściej przyczynami powstawania błędów systematycznych są:
- nieuwzględnienie poprawek narzędzi pomiarowych,
- uproszczenie wzorów wiążących wielkości mierzone w metodach pośrednich,
- wpływ narzędzi pomiarowych na obiekt badania.
Błąd systematyczny należy obliczyć i usunąć z surowego wyniku pomiaru przez zastosowanie poprawki. Błąd dopuszczalny narzędzia pomiarowego podany w postaci granic wartości błędu, jest błędem systematycznym o nieznanej wartości, zatem nie może być wyeliminowany. Znane granice tego błędu określają wprost niedokładność wyniku pomiaru.
Sposoby opisu błędów systematycznych:
opis matematyczny błędów systematycznych może być złożony, ponieważ wynikają one ze zmienności wielu czynników towarzyszących badanemu procesowi; złożoność opisu matematycznego zależy od charakteru zjawisk w funkcji wartości wielkości mierzonej oraz od sposobu wpływania wartości zjawiska zakłócającego na pomiar; długość i kształt łańcucha uzależnia wynikają z poziomu wiedzy.
Podział błędów ze względu na ich źródła powstawania:
· błędy systematyczne, których wartość bezwzględna wraz ze zmianą warunków zmienia się według pewnej funkcji,
· błędy przypadkowe, gdy wartość bezwzględna zmienia się mimo (naszym zdaniem) stałych warunków pomiaru.
Przykłady błędów systematycznych:
· błąd systematyczny o wartości stałej,
· błąd systematyczny o wartości liniowo narastającej,
· błąd systematyczny o wartości proporcjonalnie i wykładniczo narastającej.
44. Kryterium podziału błędów.
Praktycznie jest stosowany podział błędów ze względu na znajomość ich źródeł powstawania:
- błędy systematyczne,
- błędy przypadkowe,
- błędy addytywne,
- błędy multiplikatywne.
45. Reguły zaokrąglania wyznaczonych wartości.
- pozostawia się tyle cyfr znaczących, by cyfra najmniej znacząca miała takie samo znaczenie jak najmniej znacząca w obliczonym i zaokrąglonym błędzie bezwzględnym,
- jeżeli pierwsza z odrzucanych cyfr jest mniejsza niż 5, to ostatniej z pozostawionych nie odrzuca się,
- jeżeli pierwsza z odrzucanych cyfr jest większa od 5 lub równa 5 z następujących po 5 przynajmniej jedną cyfrą różną od 0, to ostatnią z pozostawionych cyfr zwiększa się o jeden,
- jeżeli część odrzucana składa się z cyfry 5 i następujących po niej zer, to ostatnią po niej cyfrę, jeżeli jest parzysta, pozostawia się bez zmiany, natomiast jeżeli jest nieparzysta, zwiększa się o jeden.
46. Właściwości błędów przypadkowych przy dużej liczbie powtórzeń.
- wartości błędów bezwzględnych równych co do modułu są jednakowo prawdopodobne,
- małe wartości modułów błędów bezwzględnych są bardziej prawdopodobne niż duże,
- prawdopodobieństwo wystąpienia wartości błędu bezwzględnego przekraczającego co do modułu pewną wartość (określoną liczbą) jest prawie równie zeru,
- powierzchnia pod funkcją prawdopodobieństw rozkładu błędów jest równa 1,
- w praktyce pomiarowej, przy dużej liczbie powtórzeń (ponad 20), dodaje się do tych właściwości postulat Gaussa, który brzmi: "funkcja gęstości rozkładu błędów ma rozkład normalny".
47. Podaj wzór na błąd względny i-tego pomiaru dla rozkładu Gaussa (pi).
![]()
48. Podaj wzór na błąd względny wartości średniej w rozkładzie Gaussa (x(śr)i) dla poziomu ufności p.
![]()
49. Podaj wzór na błąd względny i-tego pomiaru w rozkładzie Studenta dla poziomu ufności p i serii n pomiarów.
50. Podaj wzór na błąd względny wartości średniej w rozkładzie Studenta dla poziomu ufności p i serii n pomiarów.
51. Przykłady błędów systematycznych o wartości stałej:
przesunięcie skali (mechaniczne lub elektryczne ...).
Przykłady błędów systematycznych o wartości liniowo narastającej:
skok temperatury, który w dzielniku rezystancyjnym spowodował zmianę stałej podziału wskutek nierównomiernego rozgrzania itp.
Przykłady błędów systematycznych o wartości narastającej proporcjonalnie i wykładniczo:
zmiana prądu pomiarowego I w mostku z czujnikiem termistorowym mającym mierzyć temperaturę, która powoduje wzrost temperatury czujnika, co wpływa na jego rezystancję i jednocześnie na pomiar.
52. Co rozumiesz pod pojęciem wartość chwilowa.
Wartość chwilowa jest to wartość zmierzona w danej chwili.
53. Co rozumiesz pod pojęciem wartość skuteczna.
Wartość skuteczna jest to:
lub dla wartości sinusoidalnej jest to stosunek wartości maksymalnej przez ![]()
54. Co rozumiesz pod pojęciem wartość średnia.
Wartości średnie dzielą się na wartości:
- średnia półokresowa:
- średnia całookresowa:
55. Co rozumiesz pod pojęciem wartość szczytowa.
Wartością szczytową nazywamy wartość:
isz = ks. ISk
i jest to maksymalna wartość amplitudy.
56. Co rozumiesz pod pojęciem wartość międzyszczytowa.
Wartością międzyszczytową nazywamy maksymalną wartość między dwoma sąsiadującymi amplitudami dodatnią i ujemną.
57. 61. Budowa, zasada pracy, symbole, błędy przyrządu magnetoelektrycznego.
Fizyczna zasada przetwarzania polega na mechanicznym oddziaływaniu pola magnetycznego o określonej indukcji na przewodnik z prądem elektrycznym. Konstrukcyjnie przewodnik z prądem jest wielozwojową cewką o kształcie prostokątnej ramki wykonanej z drutu miedzianego. Cewka może zawierać do tysiąca zwojów z drutu o średnicy setnych części milimetra i mieć rezystancję kilkuset omów. Ramka może się obracać, gdyż jest ułożyskowana na czopach lub zawieszona na taśmach metalowych. Z ułożyskowaną ramką łączy się dwie sprężyny spiralne, z których jedna skręca się a druga rozkręca, gdy ramka obraca się wokół swojej osi. Siła oddziaływania pola na zwoje z prądem daje moment napędowy ramki, która zajmuje położenie równowagi momentów, tj. momentu napiętej sprężyny i momentu napędowego. W konstrukcji o zawieszeniu na taśmach lub taśmie moment odkształcenia skręcanych taśm i moment napędowy wyznaczają kąt równowagi.
Ramka ułożyskowana lub zawieszona jest organem ruchomym przetwornika.
Pole magnetyczne jest wytwarzane przez magnes trwały, stanowiący część obwodu magnetycznego przetwornika. Obwód ten musi zapewnić w szczelinie roboczej pole magnetyczne o dużej i niezmiennej indukcji B i o wymaganej geometrii. Najczęściej wymagana typowa geometria pola jest polem promieniowo jednostajnym, tzn. wzdłuż szczeliny pole ma stałe natężenie i skierowane wzdłuż promienia krzywizny. Ogólnie obwód magnetyczny może zawierać: magnes trwały, nabiegunniki, rdzeń, jarzmo. Magnes trwały jest wykonany ze specjalnego stopu magnetycznie twardego. Możliwe jest wytworzenie w szczelinie roboczej indukcji o wartości do 1T i o niestałości wieloletniej pomijalnie małej. Nabiegunniki i rdzeń są wykonywane z materiału magnetycznie miękkiego. Pole magnetyczne promieniowo jednostajne zapewnia liniowość przetwarzania.
Błędy w przetworniku magnetoelektrycznym są związane ze zjawiskami występującymi w realnej konstrukcji, a nie uwzględnianych w równaniach przetwarzania. Są to: niewspółśrodkowość rdzenia między nabiegunnikami naruszy promieniową jednostajność pola magnetycznego, zjawisko tarcia w ułożyskowaniu wywołuje moment tarcia, zmiany temperatury zmieniają indukcję w szczelinie, stałą sprężyny, rezystancję cewki.
58. 62. Budowa, zasada pracy, symbole, błędy przyrządu elektromagnetycznego.
Przetwornik elektromagnetyczny działa na zasadzie elektromagnesu, tzn. oddziaływania pola magnetycznego, wytworzonego przez cewkę z prądem, na blaszkę lub blaszki z materiału magnetycznie miękkiego. Blaszkę taką tradycyjnie nazywa się rdzeniem. Jedna z blaszek osadzona jest na osi i ma swobodę przemieszczania. Kierunek powstawania sił oddziałujących na blaszkę wynika z zasady elektromagnesu: układ cewka-rdzeń dąży do zwiększenia energii pola magnetycznego.
Istnieją zjawiska mające wpływ na dokładność pomiarów z wykorzystaniem przetwornika elektromagnetycznego. Są to m. in.: tarcie w łożyskach i histereza sprężyn; nieliniowość magnesowania rdzeni, histereza magnetyczna i nasycanie się magnetyczne rdzeni; rozmagnesowujące działanie prądów wirowych indukowanych w rdzeniach znajdujących się w polu magnetycznym przemiennym; oddziaływanie zewnętrznego pola magnetycznego na rdzeń ruchomy; wpływ temperatury na sztywność sprężyn i na rezystancję cewki.
59. 63. Budowa, zasada działania, symbole, błędy licznika energii elektrycznej.
Licznik energii elektrycznej służy do pomiaru wartości energii elektrycznej, dostarczonej w pewnym przedziale czasu. Organ ruchomy przetwornika wykonuje w okresie pomiaru energii pewną liczbę obrotów N, proporcjonalną do wartości zmierzonej energii:
N=kW.
Przekładnia mechaniczna zębato-ślimakowa ma przeniesienie dobrane w taki sposób, aby podziałka cyfrowa liczydła sumującego wskazywała bezpośrednio wartość energii w kilowatogodzinach. Liczydło nie ma urządzenia zerującego. Przeniesienie przekładni mechanicznej wyznacza stałą znamionową licznika cWn, to jest liczbę obrotów jaką musi wykonać organ ruchomy, aby stan liczydła zmienił się o jednostkę. Ma ona wartość niezmienną.
Współczynnik proporcjonalności między rzeczywiście wykonaną przez organ ruchomy liczbę obrotów N a wartością energii przeprowadzonej przez licznik W nazywa się stałą rzeczywistą licznika:
cWr=N/W.
Jeżeli stałe - znamionowa i rzeczywista - różnią się od siebie powstaje błąd pomiaru energii.
65. Opisz sposób sprawdzania licznika energii elektrycznej.
W celu sprawdzenia licznika energii elektrycznej (doświadczalnego wyznaczenia jego klasy) musimy określić wartość stałej rzeczywistej danego przyrządu. W tym celu dokonujemy watomierzem o określonej klasie pomiaru mocy przepuszczanej przez licznik energii w określonym czasie. Jednocześnie dokonujemy zliczania ilości obrotów wykonanych przez licznik w tym czasie. Mając daną energię przepuszczoną przez licznik W (iloczyn mocy wskazywanej przez watomierz oraz czasu przez jaki pomiar był dokonywany) oraz ilość obrotów tarczy licznika N możemy wyznaczyć stałą rzeczywistą licznika według wzoru Cr=N/W. Po kilkakrotnym powtórzeniu tych czynności (doświadczalnym wyznaczeniu kilku wartości stałych rzeczywistych licznika) wyznaczamy wartość graniczną różnicy wartości stałych znamionowych i rzeczywistych licznika. Klasę licznika wyznaczamy zaokrąglając do odpowiedniej wartości z szeregu wartości, które mogą przyjmować klasy urządzeń liczbę otrzymaną ze wzoru:
![]()
Ponadto w licznikach energii można sprawdzić układ wytwarzający moment kompensujący tarcie oraz działanie hamulca przy obniżonym i podwyższonym napięciu zasilającym oraz rozwartym obwodzie prądu. Z racji zerowej wartości prądu tarcza licznika powinna zatrzymać się. Ponadto dokonuje się sprawdzenia czułości licznika przy warunkach znamionowych (U=220 V, cosfi=1, I=0.5 % Izn). W tych warunkach tarcza powinna wykonać minimum dwa pełne obroty.
66. Podaj definicję rzeczywistej stałej licznika.
Współczynnik proporcjonalności między rzeczywiście wykonaną przez organ ruchomy liczbę obrotów N a wartością energii przeprowadzonej przez licznik W nazywa się stałą rzeczywistą licznika.
![]()
68. Podaj wzór na moment napędowy w liczniku indukcyjnym wywołany poprzez wzajemne oddziaływanie strumieni i prądów.
Wzór:
69. Co to jest stała znamionowa licznika.
Stała znamionowa licznika jest to liczba obrotów, jaką musi wykonać organ ruchomy (np. tarcza), aby stan liczydła zmienił się o jednostkę (np. Cwn=800 obr/kWh). Stała znamionowa ma wartość niezmienną i jest podana na tabliczce znamionowej licznika. Stała znamionowa licznika wyznaczona jest poprzez przełożenie przekładni mechanicznej w liczniku.
70. W jaki sposób wytwarza się moment hamujący w licznikach elektromagnetycznych.
Moment hamujący, wpływający na wartość stałej rzeczywistej, wytwarza się w licznikach elektromechanicznych za pomocą hamulca elektromagnetycznego. Aluminiowa tarcza organu ruchomego umieszczona jest między biegunami magnesu trwałego. Podczas wirowania indukują się w tarczy prądy wirowe, które współdziałając ze strumieniem magnetycznym ![]()
, dają moment:
![]()
proporcjonalny do prędkości obrotowej, odpowiedni dla licznika.
71. Podaj błędy, jakie występują przy pomiarze licznikiem energii elektrycznej.
Błąd względny pomiaru energii wyraża się wzorem:
gdzie:
Wm - energia zmierzona, wskazana na podziałce licznika,
Wr - energia rzeczywiście dostarczona
N - liczba obrotów wykonana przez organ ruchomy licznika w czasie pomiaru energii.
Jeśli stała rzeczywista jest mniejsza od stałej znamionowej, licznik wskazuje za mało (błąd ujemny), jeśli jest większa, licznik ma błąd dodatni (wskazuje za dużo).
Ponadto przy określaniu stałej rzeczywistej Cwr pojawiają się następujące błędy:
![]()
- błąd wyznaczenia ilości obrotów , który wyraża się wzorem:
![]()
gdzie:
![]()
- błąd określenia początku i końca pomiaru ilości obrotów związanej z określeniem miejsca na tarczy uznanego za początek lub koniec pomiaru
r- promień tarczy
N - ilość wykonanych przez tarczę obrotów
![]()
- błąd pomiaru czasu wynikający z właściwości czasomierza.
![]()
- błąd pomiaru wartości mocy przeprowadzonej przez licznik (błąd watomierza) wyznaczony z klasy przyrządu
![]()
- błąd pomiaru wartości energii przeprowadzonej przez licznik wyznaczony ze wzoru:
![]()
![]()
- błąd bezwzględny wyznaczonej wartości stałej rzeczywistaj licznika wyznaczony według wzoru:
![]()
74. 116. Definicja współczynnika szczytu:
Umax
ks= --------
Usk
, gdzie Umax-wartość max.(amplituda)
Usk-wartość skuteczna
75.Definicja współczynnika kształtu:
Usk _
kk= -----
U0
T
U0=1/T* U(t)dt
0
,gdzie U0-wartość średnia wyprostowana
76.Wartości współczynników kształtu dla odpowiednich przebiegów:
-sinusoidalnego: kk=1.11
-prostokątnego: kk=1
-trójkątnego: kk=2/3
77.Błąd bezwzględny wynikający z błędu współczynnika kształtu:
k
Uk= ----*U
100
k=(1.11-kk)/kk
, gdzie U-wartość zmierzona
78.Zastosowanie mostków w metrologii:
Mostki są to układy, w których wykorzystuje się zerową metodę pomiaru do wyznaczania takich wartości jak:
(MOSTKI PRĄDU STAŁEGO:)
-rezystancja: mostek Wheatstone'a, mostek Thomsona
(MOSTKI PRĄDU PRZEMIENNEGO:)
-pojemność i współczynnik strat dielektrycznych kondensatorów:
mostek Wiena, mostek Scheringa
-indukcyjność i dobroć cewek: mostek Maxwella,
mostek Maxwella-Wiena
-pojemność i współczynnik strat dielektrycznych kondensatorów
oraz indukcyjność i dobroć cewek: mostki transformatorowe
(uniwersalne)
79. 94. 95. Czułość układów mostkowych:
Czułość mostka wzrasta wraz z powiększaniem wartości napięcia zasilającego oraz jego częstotliwości(mostki prądu przemiennego). Jednak wartość napięcia zasilającego jest ograniczona wytrzymałością elementów mostka i względami bezpieczeństwa.
93. Obliczenie pojemności za pomocą mostka Wiena
![]()
117. Podaj błędy addytywne występujące w pomiarze mocy oscyloskopem.
- błąd liniowości,
- błąd temperaturowy,
- średnica plamki,
118. Podaj błędy multiplikatywne występujące w pomiarze mocy oscyloskopem.
- błąd podstawowy współczynnika odchylania,
Inne opracowania teoretyczne:
Budowa, zasada pracy, symbole, błędy dzielnika.
Dzielniki napięcia są budowane z wzorcowych oporników (dzielniki rezystancyjne), z wzorcowych kondensatorów (dzielniki pojemnościowe) albo jako indukcyjne dzielniki napięcia.
Dzielniki są przetwornikami elektrycznymi napięcia mierzonego U1 na inne, mniejsze napięcie U2. Równanie przetwarzania wynika z zależności
U1=KU2
w której K jest przełożeniem dzielnika.
Dokładność rezystancyjnego dzielnika napięcia bezpośrednio zależy od dokładności wykonania oporników, z których dzielnik jest zbudowany. Dzielniki napięcia rezystancyjne o przeciętnej dokładności są wykonywane w klasach dokładności 0,01; 0,02; 0,05. Rezystancyjne dzielniki napięcia znajdują zastosowanie przede wszystkim przy pomiarze napięcia stałego metodą kompensacyjną.
W pomiarach napięcia przemiennego o bardzo dużej wartości (dziesiątki i setki kilowoltów) znajdują zastosowanie pojemnościowe dzielniki napięcia. Pojemnościowe dzielniki napięcia stosuje się przy rozszerzeniu zakresu napięciowego woltomierzy elektrostatycznych oraz w elektroenergetyce przy pomiarach najwyższych napięć. Dokładność pomiarowych dzielników pojemnościowych jest przeciętna: klasy 0,5;1;3. Pojemnościowych dzielników pomiarowych nie używa się przy pomiarach prądu stałego.
Przy pomiarach prądu przemiennego najwyższej dokładności mają zastosowanie indukcyjne dzielniki napięcia (IDN). Są to układy kaskadowo połączonych autotransformatorów odpowiednio wykonanych. Każdy stopień kaskady jest autotransformatorem nawiniętym multifilarną wiązką przewodów na rdzeniu dużej przenikalności magnetycznej, która jest istotna dla dokładności dzielnika. Niedokładność nastawionego stosunku napięć (przekładni) jest dla IDN rzędu 10-6 (nawet mniejsza). Kaskadowość układu IDN polega na tym, że napięcie jednego stopnia wyższej dekady jest doprowadzone do wejścia autotransformatora niższej dekady, a następnie dzielone w stosunku dziesiętnym. Kaskadowe połączenie N dekad zapewnia możliwość nastawienia przekładni z rozdzielczością 10N. Jest to potrzebne ze względu na sposób stosowania IDN w układach pomiarowych. Napięcie wejściowe może być rzędu kilkudziesięciu lub kilkuset woltów, zależnie od częstotliwości. Impedancja wejściowa jest nie mniejsza niż 50k, wyjściowa zależy od nastawionego przełożenia.
Budowa, zasada pracy, symbole, błędy bocznika.
Bocznik jest przetwornikiem, służącym do przetwarzania natężenia prądu mierzonego (najczęściej prądu stałego) na napięcie. Konstrukcyjnie przetwornikiem jest opornik wzorcowy. Wymagana jest duża stałość i dokładność rezystancji. W związku z dużym prądem płynącym z reguły przez bocznik następuje na nim wydzielanie znacznej mocy. Bocznik musi mieć odpowiednią zdolność odprowadzenia ciepła.
Błąd bezwzględny dla modeli probabilistycznych rozkład Gaussa:
- błąd bezwzględny każdego i-tego pomiaru na poziomie ufności p-xp określa jednakowy dla każdego i-tego pomiaru przedział liczbowy wewnątrz którego mieści się z prawdopodobieństwem p wartość rzeczywista,
- błąd bezwzględny wartości średniej na poziomie ufności p-![]()
p określa dla wartości średniej przedział liczbowy, wewnątrz którego mieści się z prawdopodobieństwem p wartość rzeczywista,
Błąd bezwzględny dla modeli probabilistycznych rozkład Studenta:
- błąd bezwzględny każdego i-tego pomiaru na poziomie ufności p, z n - krotnym powtórzeniem pomiaru xnp określa jednakowy dla każdego i-tego pomiaru przedział liczbowy, wewnątrz którego mieści się z prawdopodobieństwem p przy n - krotnym powtórzeniu wartość rzeczywista,
- błąd bezwzględny wartości średniej na poziomie ufności p, z n - krotnym powtórzeniem pomiaru ![]()
np określa dla wartości średniej przedział liczbowy, wewnątrz którego mieści się z prawdopodobieństwem p, z n - krotnym powtórzeniem wartość rzeczywista.
Wzór na błąd bezwzględny gdy znany jest błąd względny multiplikatywny.
![]()
gdzie x - wartość zmierzona
Wzór na błąd bezwzględny gdy znany jest błąd względny addytywny.
![]()
gdzie xzakr - zakres przyrządu
Błąd bezwzględny całkowity .
Budowa, zasada pracy, symbole, błędy przyrządu elektrodynamicznego z rdzeniem (ferrodynamicznego).
Przetwornik ten działa na tej samej zasadzie fizycznej co przetwornik elektrodynamiczny bez rdzenia. Zmiana w konstrukcji polega na wprowadzeniu ferromagnetyka jako materiału magnetycznie czynnego w obwodzie magnetycznym przetwornika. W ten sposób pole magnetyczne oddziałujące na cewkę ruchomą jest wielokrotnie silniejsze przy takim samym przepływie (amperozwojach) cewki nieruchomej. Kształt pola zależy od kształtu szczeliny w obwodzie ferromagnetycznym. Korzyści konstrukcyjne są następujące: duży moment napędowy, mała liczba zwojów cewki ruchomej i cewki nieruchomej, większa czułość, mniejsza moc wejściowa.
Wprowadzenie ferromagnetyka pogarsza jednak właściwości metrologiczne przetwornika, przede wszystkim jego dokładność, ponieważ pojawiają się zjawiska, których nie ma w przetworniku elektrodynamicznym: histereza magnetyczna, nieliniowość magnesowania, prądy wirowe w ferromagnetyku.
Budowa, zasada pracy, symbole, błędy przyrządu elektrodynamicznego bez rdzenia.
Fizyczna zasada działania przetwornika elektrodynamicznego wykorzystuje siłę wzajemnego oddziaływania dwu (lub więcej) cewek, przez które przepływa prąd mierzony. Jedna z cewek jest ruchoma. Cewki - ruchoma i nieruchoma - mogą być połączone równolegle lub szeregowo z tym samym obwodem elektrycznym, albo przez każdą z nich może płynąć prąd z różnych obwodów elektrycznych. Jeden z prądów płynie przez cewkę nieruchomą, wytwarzając proporcjonalne pole magnetyczne H. Kształt pola zależy od wymiarów cewki (stosunku długości do średnicy). Drugi prąd jest doprowadzany za pomocą sprężyn spiralnych do cewki ruchomej, podobnie jak w przetworniku magnetoelektrycznym. Sprężyny te służą jednocześnie do wytwarzania momentu zwrotnego. Do wytwarzania momentu tłumiącego stosuje się tłumik powietrzny lub dobrze osłonięty, ze względu na pole rozproszenia, tłumik elektromagnetyczny.
Przetwornik elektrodynamiczny charakteryzuje się dużą dokładnością wskazań, niezależnie od zmieniających się (w określonym zakresie) fizycznych warunków pomiaru. Jest on najdokładniejszym przetwornikiem elektromechanicznym ale jest to konstrukcja skomplikowana, droga, mechanicznie mało wytrzymała na wstrząsy i stosowana wyłącznie w przyrządach lab. wysokiej klasy. Przetworniki elektrodynamiczne są bardzo wrażliwe na obce pola magnetyczne, dlatego zawsze są umieszczane w ekranie wykonanym z materiału ferromagnetycznego.
7.24. Metoda zerowa porównywania wielkości elektrycznych.
* Występuje przy mostkach i kompensatorach.
* Jest najdokładniejszą metodą porównania bezpośredniego.
* Pomiar polega na zrównoważeniu układu (doprowadzenie do zaniku prądu lub napięcia w kontrolowanej gałęzi układu). Przy równowadze wskaźnik równowagi (np. galwanometr) nie odchyla się w żadną stronę. Wykonuje się kilka pomiarów i przeprowadza obróbkę statystyczną danych.
* Dokładność pomiaru zależy od:
- dokładności wzorców
- czułości wskaźnika równowagi (np. galwanometru)
7.25. Metoda statyczna porównywania wielkości elektrycznych.
* Polega na porównywaniu wielkości elektrycznych w układzie statycznym (bezinercyjnym) tzn. takim, który nie ma elementów magazynujących energię lecz tylko ją rozpraszające (np. sieć elementów rezystancyjnych - układ dzielnika napięcia, układ dźwigni mech. o pomijalnej bezwładności).
* Układy takie reagują natychmiast na sygnał We i dlatego mogą mierzyć wielkości szybkozmienne.
7.26. Metoda astatyczna porównywania wielkości elektrycznych.
* Porównywanie wielkości elektrycznych w układzie astatycznym (inercyjnym) czyli zawierającym elementy magazynujące energię. Reakcja takiego układu opóźnia się w stosunku do sygnału We i dlatego może on być stosowany wyłącznie przy pomiarach wielkości wolnozmiennych. Ma charakter całkujący.
* Przykładem jest galwanometr magnetoelektryczny (posiada bezwładność I).
7.27. Metoda porównywania wielkości z wzorcem mechanicznym:
* Polega na porównaniu wielkości mierzonej mechanicznej (lub elektrycznej przetworzonej na mechaniczną - np. siła elektrodynamiczna F=BIL) z wzorcem mechanicznym (np. wzorzec masy). Opiera się na fizycznej zasadzie równowagi sił, którą utożsamia się z równością 2 mas.
* Przykłady:
- waga szalkowa (równoważymy układ dodając lub odejmując odważniki - występuje błąd dyskretyzacji i błąd wzorca)
- waga sprężynowa (zasada proporcjonalnego odkształcenia sprężyny do siły proporcjonalnej z kolei do masy - błąd wyznaczenia przesunięcia x i wzorca modułu sprężystości k).
7.28. Opisz metodę porównywania wielkości w mostku.
* Mostek oparty jest na metodzie zerowej porównywania wielkości elektrycznych.
* Schemat:
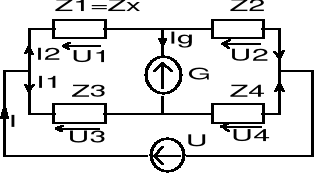
* Pomiar polega na zrównoważeniu mostka tj. doprowadzeniu do stanu równowagi: Ig=0 (wychylenie galwanometru=0) i obowiązuje zależność: ![]()
, skąd mamy: ![]()
Należy przyjąć napięcie U takie, aby nie przekroczyć Imax. Dla wyeliminowania błędów przypadkowych wykonuje się serię pomiarów i statystykę. Stosuje się naprzemian zasilanie w przeciwnych kierunkach (prąd stały) dla wyeliminowania sił termoelektrycznych.
* Błędy wynikają i zależą od:
- błędów elementów wzorcowych (R2,R3,R4,...)
- nieczułości (nc=R3/R3*100%)
- dyskretyzacji (dy=R3min/R3*100%) dekadowego rezystora wzorcowego
- czułości galwanometru
- przewodów łączących - powinny być krótkie
7.29. Opisz metodę porównywania wielkości w kompensatorze.
* Kompensator oparty jest na metodzie zerowej porównywania wielkości elektrycznych.
* Schemat:
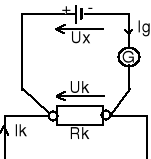
Mierzy napicie dołączone (stosunkowo małe - do 1 V)
Ux=Uk=Rk*Ik
* Pomiar polega na takiej zmianie prądu Ik (kompensator ze stałą rezystancją) lub rezystora Rk (kompensator ze stałym prądem), aby Uk=Ux. Wtedy mamy stan równowagi Ig=0 (galwanometr w położeniu równowagi). Brak błędów systematycznych wynikających z Rwewn źródła badanego, gdy kompensator nie obciąża go w momencie równowagi. Pomiary powtarza się i obrabia statystycznie.
* Błędy wynikają i zależą od:
- niedokładności wzorca napięcia lub rezystorów kompensatora (Rk)
- nieczułości wskaźnika równowagi (nc=Ik/Ik*100%) - powinien być pomijalnie mały tzn.<0.1*Ux
7.30. Metoda porównywania wielkości w detektorze synchronicznym.
* Detektor synchroniczny pozwala na wydzielenie z sygnału jego składowej czynnej i biernej oraz na zmierzenie tych amplitud.
* Schemat:
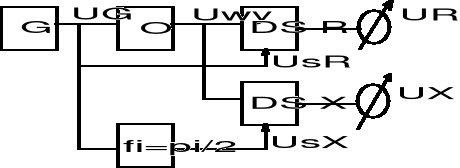
* Napięcie przepuszczane przez detektor: Uwy=Um*[cos(-s)+sin(-s)] , gdzie s-faza sygnału sterującego
Dla DSR: s=0; Uwy=Um
Dla DSX: s=pi/2; Uwy=j*Um
* Wzory dla detektora:
UR=U*cos;
UR=cos*U+U*sin*
UX=U*sin;
UX=sin*U+U*cos*
7.31. Zagadnienia metrologiczne w pomiarze napięć zmiennych.
* Mierniki napięcia przemiennego są przeważnie wyskalowane dla wartości skutecznych prądu sinusoidalnego, a mierzą Uwsk=k*Usk, gdzie współczynnik przetwarzania.
* Mierniki magnetoelektryczne prostownikowe:
- z prostowaniem uśredniającym - mostek Graetza (mierzy Uśr bez względu na kształt)
Uśr=Usk*k; k=1/kk=1.11 gdzie kk - współczynnik kształtu dla sinusoidy
- z prostowaniem szczytowym - dioda + kondensator (mierzy Umax)
Um=k*Usk; k=ks=1.41 gdzie ks - współczynnik szczytu dla sinusoidy
Są bardzo wrażliwe na odkształcenia sygnału. Pobierają małą moc ale są mało dokładne.
* Mierniki elektromagnetyczne i elektrodynamiczne:
Pobierają dużą moc i obciążają źródła, ale mierzą Usk bez względu na kształt sygnału. Częstotliwość ok. 50Hz. Napięcia do 1kV.
* Mierniki elektrostatyczne - dla WN
* Mierniki elektroniczne - wszystkie częstotliwości do WCz włącznie
7.32. Pomiar napięć zmiennych woltomierzem magnetoelektrycznym z prostownikiem.
* Przetwornik magnetoelektryczny posiada bezwładność i odchyla się tylko przy prądzie stałym lub pulsującym jednokierunkowo (stąd prostownik).
* Współczynnik przetwarzania dla prostowania uśredniającego: k=kk=1.11 dla sinusoidy. Stąd Uwsk=Uśr=Usk/k=Usk/1.11
* Współczynnik przetwarzania dla prostowania szczytowego: k=1/ks=1/sqrt(2). Stąd Uwsk=Umax=Usk/k=Usk*sqrt(2)
* Występuje silna zależność od temperatury (gdyż I zamieniane na U na rezystancji) - trzeba ten błąd kompensować.
* Prostownik wprowadza nierówno-mierność podziałki (zwłaszcza dla niskich napięć)
* Zakres powiększa się poprzez szeregowe dołączenie rezystorów: Uz=Imax*(Rcu+Rd)
7.33. Zagadnienia metrologiczne w pomiarze napięć zmiennych woltomierzem elektromagnetycznym.
* Mierzy zawsze wartość skuteczną niezależnie od kształtu przebiegu. Pobiera dużą moc. Częstotliwość 10Hz-200Hz z powodu indukcyjności cewki.
* Współczynnik przetwarzania k=1; Uwsk=k*Usk=Usk
* Zakres powiększa się poprzez szeregowe dołączenie rezystorów. Gdy napięcia mierzone przekraczają 300V, to umieszcza się je na zewnątrz obudowy (chłodzenie).
* Rezystor kompensujący temperaturę: ![]()
Ostateczny wynik pomiaru dla modelu zdeterminowanego, to para liczb:
![]()
gdzie
![]()
- wartość zmierzona,
![]()
- błąd bezwzględny wartości zmierzonej,
![]()
- błąd bezwzględny poprawny,
![]()
- wartość zmierzona pojedynczego pomiaru,
![]()
- odchylenie pozorne, tzw. błąd bezwzględny pojedynczego pomiaru dla wartości średniej,
![]()
- błąd bezwzględny graniczny obejmujący wartość poprawną,
![]()
- wartość średnia serii pomiarów,
![]()
- błąd bezwzględny graniczny obejmujący wartość średnią.
Ostateczny wynik pomiaru dla modelu probabilistycznego, to para liczb:
![]()
gdzie
![]()
- błąd bezwzględny poprawny wartości średniej,
![]()
- błąd bezwzględny pomiaru dla rozkładu Studenta, dla poziomu ufności p i serii n- pomiarów,
![]()
- błąd bezwzględny wartości średniej dla rozkładu Studenta, dla poziomu ufności p i serii n- pomiarów.
1. Pomiar rezystancji omomierzem szeregowym, schemat, właściwości.
Opornik badany Rx jest przyłączony do zacisków zewnętrznych omomierza. Natężenie prądu Ix płynącego w obwodzie omomierza jest określone zależnością
![]()
w której Rs=Rd+RA - wewnętrzna rezystancja omomierza szeregowego.
Przy stałych wartościach U oraz Rs natężenie prądu Ix zależy tylko od wartości rezystancji Rx. Podziałkę omomierza szeregowego można opisać równaniem

Dokładność pomiarów omomierzem szeregowym zależy od klasy zastosowanego miliamperomierza. Zakres pomiarowy omomierzy szeregowych zawiera się na ogół w granicach 10105 . Granica górna jest uwarunkowana osiągalną czułością przetw. magnetoelektrycznych oraz wartością napięcia suchych ogniw; granica dolna - dopuszczalną obciążalnością prądową ogniw oraz wpływami rezystancji styków i przewodów w obwodzie omomierza.
2. Pomiar rezystancji omomierzem równoległym, schemat, właściwości.
Poszczególne elementy są takie same jak w omomierzu szeregowym, lecz inaczej podłączone - mierzoną rezystancję Rx przyłącza się równolegle do miliamperomierza. Miliamperomierz wskazuje natężenie prądu
i przy stałych wartościach U, Rd, RA może być wywzorcowany w omach. Dobór stałych dokonywany jest tak, aby przy Rx= otrzymać maksymalne odchylenie wskazówki miernika. Podziałka omomierza równoległego opisana jest równaniem

przy czym ![]()
- oznacza rezystancję wewnętrzną omomierza równoległego.
Podziałka omomierza równoległego ma odwrotnie uszeregowane wartości niż podziałka omomierza szeregowego. Rezystancja wewnętrzna omomierza równoległego jest zawsze mniejsza niż rezystancja omomierza szeregowego o takich samych elementach Rd i RA. Wynika z tego, że w układzie omomierza równoległego można mierzyć mniejsze rezystancje niż w odpowiednim układzie szeregowym.
Typowy zakres pomiarowy omomierza równoległego zawiera się w granicach 0,1103 . Podane granice są uwarunkowane takimi samymi czynnikami jak w omomierzu szeregowym z tym, że wartość górna jest dodatkowo ograniczona stosunkowo małymi rezystancjami wewnętrznymi mierników RA, które z kolei ograniczają maksymalną wartość rezystancji wewnętrznej omomierza równoległego. Dokładność pomiaru omomierzami równoległymi jest porównywalna z dokładnością omomierzy szeregowych.
3. Pomiar rezystancji metodą techniczną, poprawnie mierzonego napięcia, dokładność.
Rezystancję Rx można wyznaczyć pośrednio korzystając z prawa Ohma, poprzez pomiar napięcia i natężenia prądu. Sposób taki inaczej zwany jest metodą techniczną pomiaru rezystancji. Wskazania woltomierza (U) i amperomierza (I), będące podstawą do obliczenia badanej rezystancji Rx=U/I, powinny określić spadek napięcia na badanym rezystorze oraz natężenie prądu przezeń płynącego. W rzeczywistości wymagania te nie są spełnione jednocześnie. W układzie poprawnie mierzonego napięcia poprawne jest jedynie wskazanie woltomierza, natomiast amperomierz wskazuje za dużo (o prąd IV płynący przez woltomierz). Wartość Rx obliczona ze stosunku wskazań woltomierza i amperomierza jest obarczona niedokładnością wynikającą z poboru mocy przez przyrządy. Dla przyrządów "idealnych" niedokładność nie istnieje. Niedokładność metody określa się w zależności od wartości rezystancji mierzonej Rx i rezystancji przyrządów RA i RV (![]()
). Układ poprawnie mierzonego napięcia stosowany jest dla małych rezystancji (![]()
).
4. Pomiar rezystancji metodą techniczną, poprawnie mierzonego prądu, dokładność.
Metoda ta jest zbliżona do metody opisanej powyżej. W układzie poprawnie mierzonego prądu poprawne jest jedynie wskazanie amperomierza, natomiast woltomierz wskazuje za dużo (o spadek napięcia UA na amperomierzu). Wartość Rx jest również obarczona niedokładnością wynikającą z poboru mocy przez przyrządy. Dla przyrządów "idealnych" niedokładność również nie istnieje. Niedokładność metody jest określana w zależności od tych samych wartości co powyższa metoda lecz inny jest wzór ją opisujący (![]()
). Układ poprawnie mierzonego prądu stosowany jest dla rezystancji dużych (![]()
).
5. Mostek Wheatstone'a, zakres, schemat, warunki równowagi, zasilanie, dokładność.
Mostek Wheatstone'a zwany również mostkiem czteroramiennym służy do pomiaru rezystancji w zakresie od kilku omów do kilku megaomów. Dolna granica zakresu pomiarowego wynika z zakłócającego (dla małej wartości Rx) wpływu rezystancji przewodów łączących, natomiast górna granica zależy od wartości zastosowanych w układzie rezystancji, czułości galwanometru, jakości materiałów izolujących poszczególne elementy układu i dopuszczalnego napięcia zasilającego (stałego).
W pomiarach mostkowych najczęściej wykorzystuje się metodą zerową. Wówczas pomiar rezystancji Rx=R1 polega na sprowadzeniu mostka do stanu, w którym natężenie prądu Ig=0. Jest to stan równowagi mostka, osiągany poprzez odpowiednie n. Nastawienie wartości rezystancji w ramionach mostka i stwierdzany za pomocą wskaźnika zera. Z warunku Ig=0 wynikają kolejne charakterystyczne związki:
- różnica potencjałów pomiędzy punktami C, D mostka
UCD=0
- natężenia prądów w ramionach
I1=I3 oraz I2=I4
- spadki napięć na odpowiednich ramionach
UAC=UAD oraz UCB=UDB
czyli
I1R1=I2R2 oraz I3R3=I4R4
skąd otrzymujemy
![]()
Jest to warunek równowagi mostka.
Po sprowadzeniu mostka do stanu równowagi możemy wyznaczyć mierzoną wartość Rx korzystając z obowiązującego wówczas warunku równowagi![]()
Pomiar rezystancji przy pomocy mostka zrównoważonego jest realizowany metodą zerową, a mierzona wartość jest bezpośrednio porównywana z wartością wzorcową. Mostek zrównoważony spełnia więc podstawowe warunki, w których możliwe jest osiągnięcie bardzo dużej dokładności pomiarów.
Błędy pomiarów w mostkach zrównoważonych pochodzą od:
- błędów odtworzenia wzorca,
- błędów procesu porównywania z wzorcem, tj. procesu równoważenia mostka.
Wyszukiwarka
Podobne podstrony:
METR T~11 DOC
METR T~1 DOC
METR-T~1, AGH IMIR Mechanika i budowa maszyn, II ROK, Metrologia Tyka Haduch, Metrologia, Metrologia
LF 96A~2 DOC
O$WIEC~2 DOC
POWIE$~2 DOC
1 WAHA~2 DOC
26 KON~2 DOC
LF 96O~2 DOC
~$LBET~2 DOC
MASZ 6~2 DOC
sprawko tłoczenie doc
J$DROW~2 DOC
ĆW8 WY~2 DOC
MIKU$ ~2 DOC
więcej podobnych podstron