Wyznaczanie reakcji w ramie statycznie wyznaczalnej przy
użyciu zasady prac wirtualnych
Zadanie
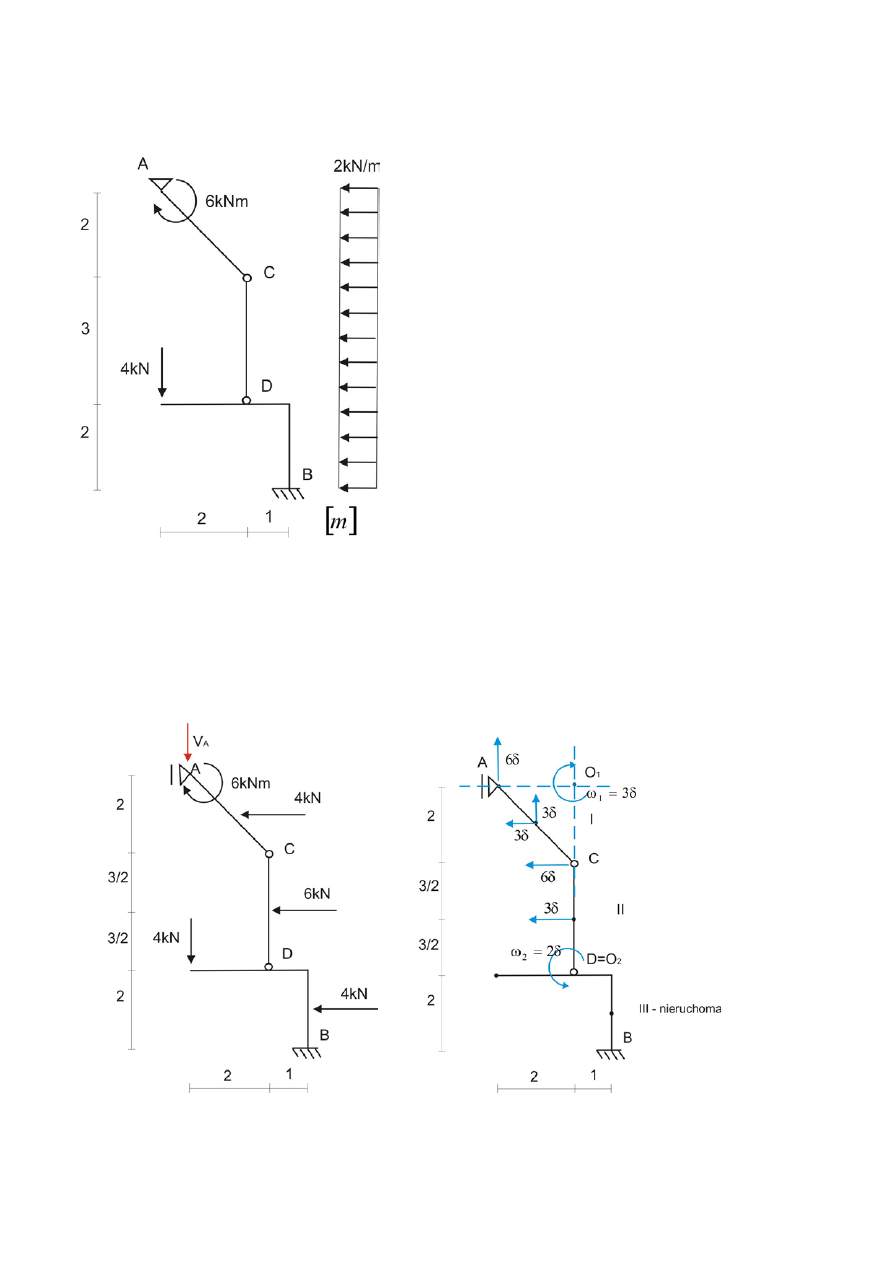
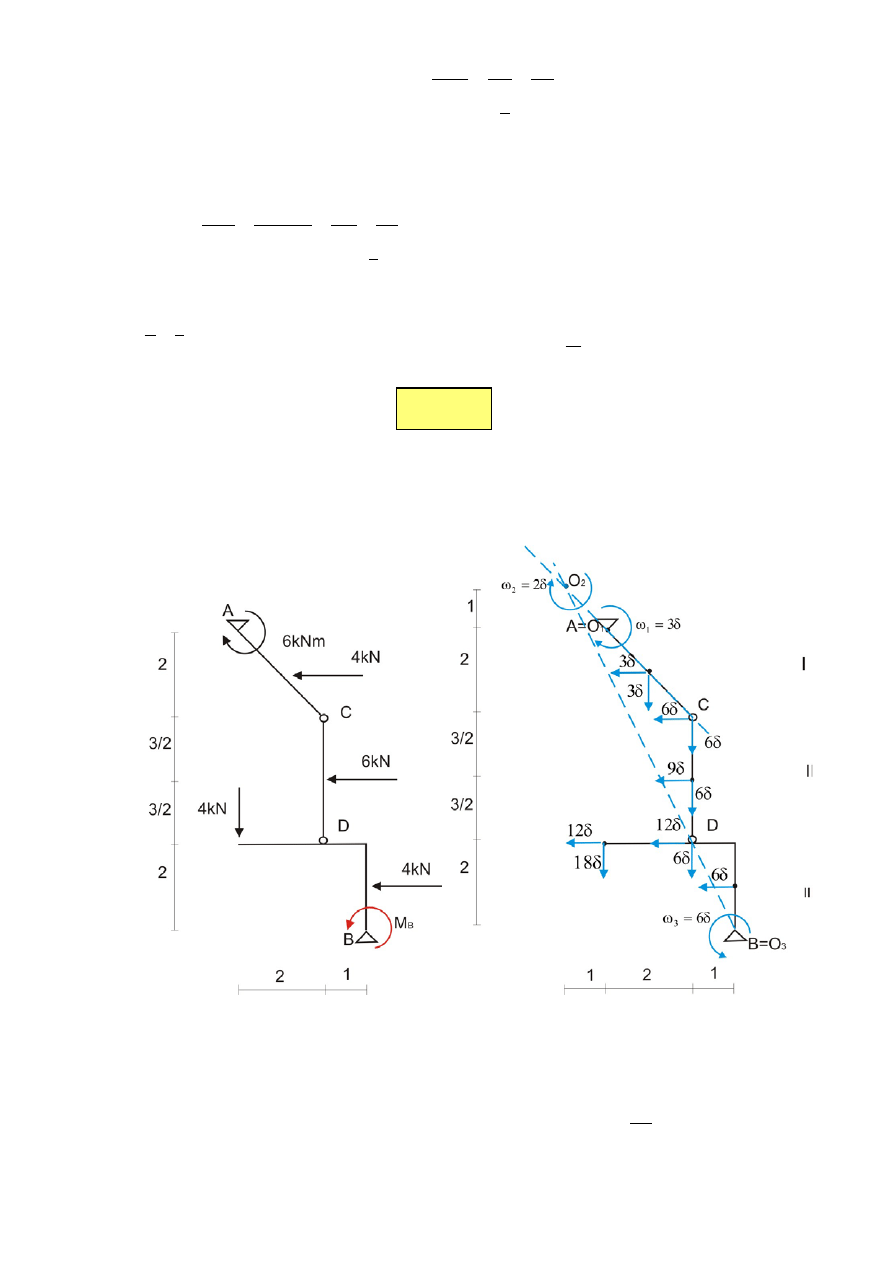
Korzystając z zasady prac wirtualnych wyznacz reakcje w ramie podanej na rysunku 1.
Rys.1
Rama jest złożona z trzech tarcz połączonych przegubami D i C.
Wyznaczenie każdej reakcji oznacza rozwiązanie osobnego zadania.
1. Wyznaczanie reakcji V
A
Podporę przegubową w punkcie A zastępujemy podporą przegubowo przesuwną z przesuwem
pionowym. Do układu sił czynnych dodajemy reakcję V
A
(rys. 2)
Rys.2 Rys.3
Wyznaczanie przemieszczeń wirtualnych (prędkości możliwych) układu (rys.3).
•
Analizę możliwych prędkości układu zaczynamy od tarczy III (najbardziej podpartej)
która jest nieruchoma.
• Nieruchomy przegub D jest
środkiem chwilowego obrotu tarczy II.
•
Przyjmujemy prędkość kątową tego obrotu jako
δ
ω
2
2
=
(jednostka
m
δ
- na rysunku
zaznaczona bez jednostek).
• Przy pomocy
2
ω
wyznaczamy przemieszczenia
wirtualne punktów bryły II (także
przegubu C).
•
Znając kierunek prędkości przegubu C oraz podpory A wyznaczamy środek chwilowego
obrotu tarczy I.
•
Wyznaczamy prędkość kątową
m
m
C
O
C
δ
δ
ω
3
2
6
v
1
1
=
=
=
zwrot przyjmujemy tak aby przy
obrocie wokół O
1
zgadzał się zwrot prędkości
C
v .
•
Prędkość kątowa
1
ω
pozwala wyznaczyć przemieszczenia wirtualne punktów tarczy I.
Zapisujemy zasadę prac wirtualnych dla układu:
(
)
δ
δ
δ
δ
δ
δ
δ
δ
∀
=
+
+
+
−
=
⋅
+
⋅
+
⋅
+
⋅
−
=
=
∑
0
18
18
12
6
3
6
3
6
3
4
6
kN
kN
kN
V
kN
m
kNm
kN
V
F
L
A
A
i
i
kN
V
kN
kN
kN
V
A
A
8
0
18
18
12
6
=
→
=
+
+
+
−
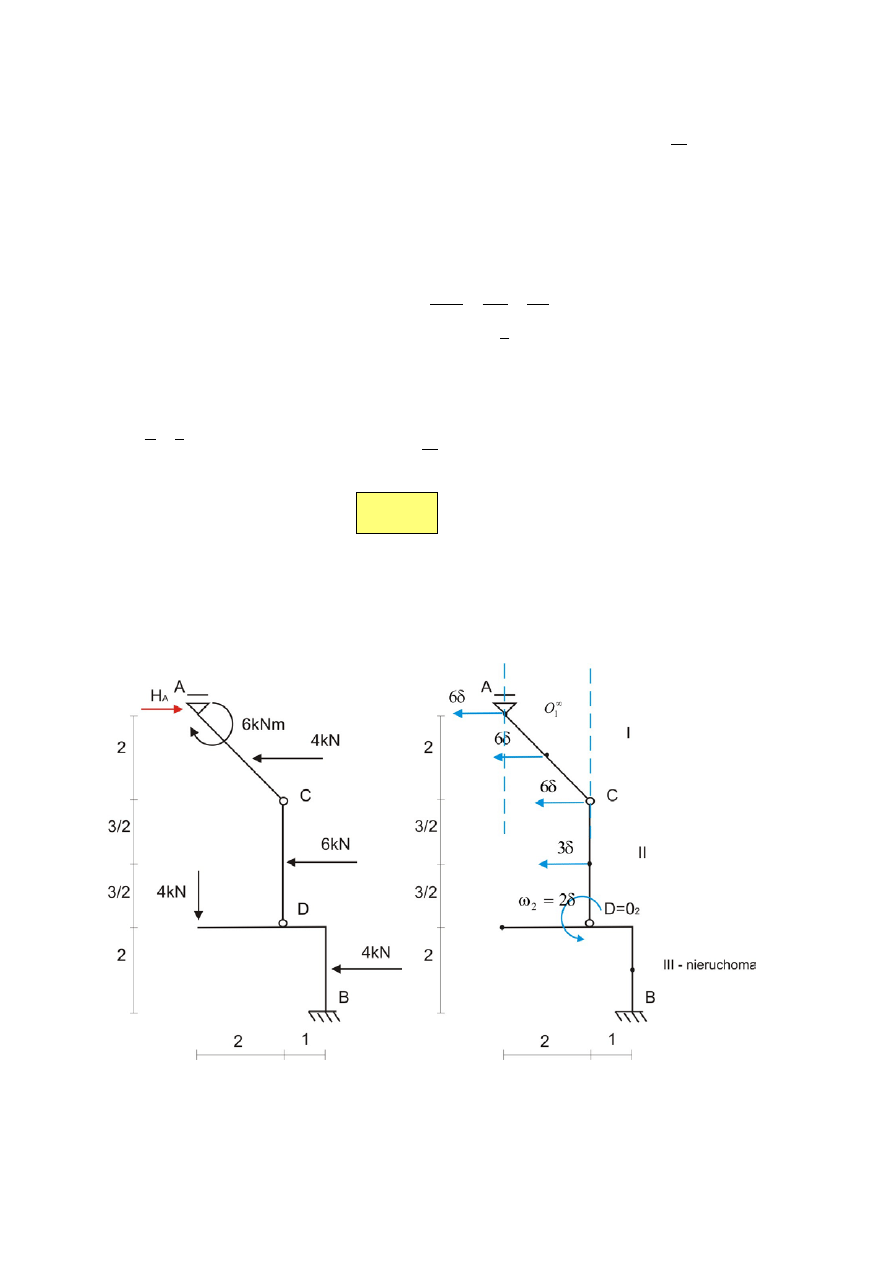
2. Wyznaczanie reakcji H
A
Podporę przegubową w punkcie A zastępujemy podporą przegubowo przesuwną z przesuwem
poziomym. Do układu sił czynnych dodajemy reakcję H
A
(rys. 4).
Rys. 4 Rys.5
Wyznaczanie przemieszczeń wirtualnych (prędkości możliwych) układu (rys.5).
•
Analizę możliwych prędkości układu zaczynamy od tarczy III która jest nieruchoma.
•
Nieruchomy przegub D jest środkiem chwilowego obrotu tarczy II.
•
Przyjmujemy prędkość kątową tego obrotu jako
m
δ
ω
2
2
=
• Przy pomocy
2
ω
wyznaczamy przemieszczenia wirtualne punktów bryły II (także
przegubu C).
•
Znając kierunek prędkości przegubu C oraz podpory A wyznaczamy środek chwilowego
obrotu tarczy I ( leży on w nieskończoności – bryła I porusza się poprzez poziomą
translację).
•
Wszystkie punkty bryły I mają takie same przemieszczenia wirtualne jak punkt C.
Zapisujemy zasadę prac wirtualnych dla układu:
(
)
δ
δ
δ
δ
δ
δ
δ
δ
∀
=
+
+
−
=
⋅
+
⋅
+
⋅
+
⋅
−
=
=
∑
0
18
24
6
3
6
0
6
6
4
6
kN
kN
H
kN
m
kNm
kN
H
F
L
A
A
i
i
kN
H
kN
kN
H
A
A
7
0
18
24
6
=
→
=
+
+
−
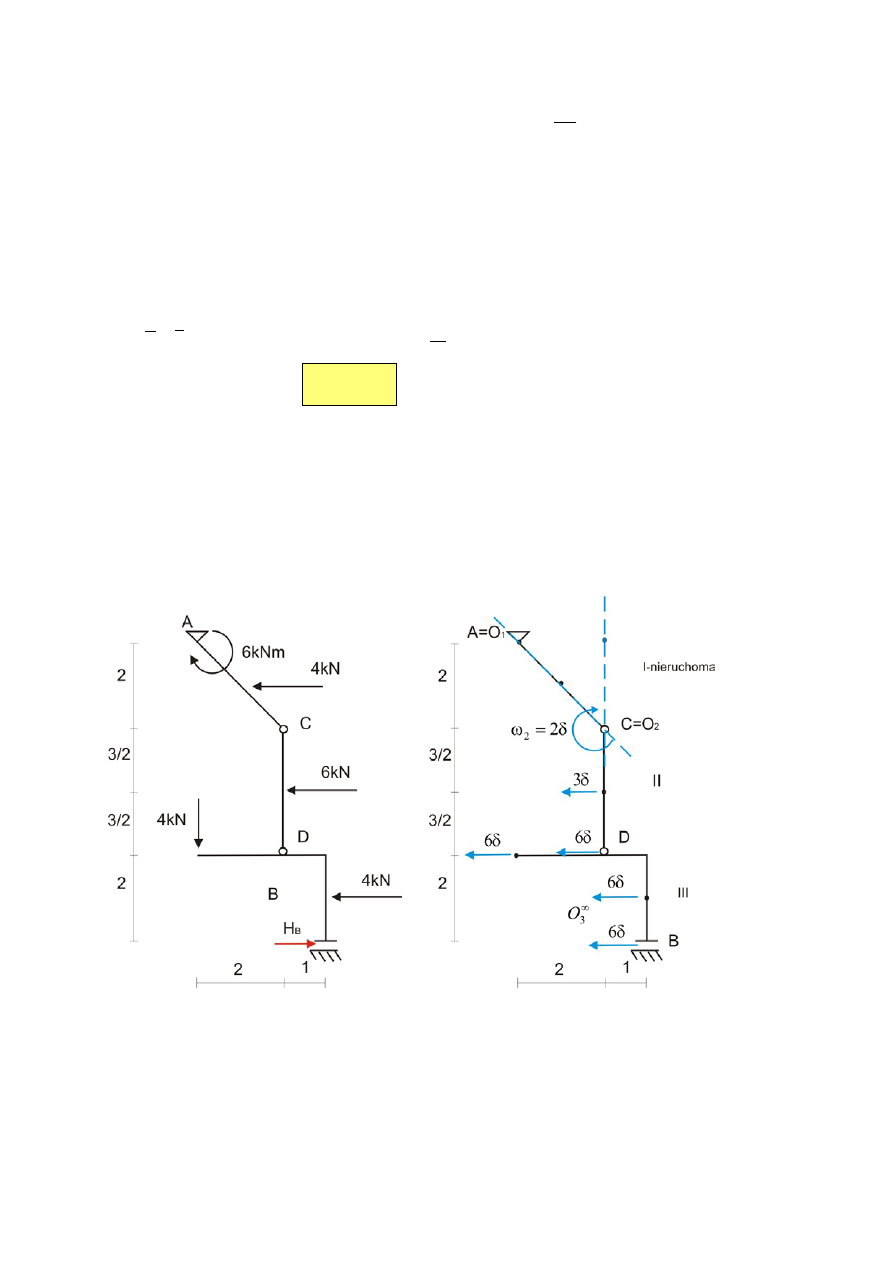
3. Wyznaczanie reakcji H
B
Utwierdzenie w punkcie B zastępujemy utwierdzeniem z przesuwem poziomym. Do układu sił
czynnych dodajem
y reakcję H
B
(rys. 6).
Rys. 6 Rys.7
Wyznaczanie przemieszczeń wirtualnych (prędkości możliwych) układu (rys.7).
•
Analizę możliwych prędkości układu zaczynamy od tarczy III która porusza się przez
poziomą translację. Przyjmujemy przemieszczenia wirtualne wszystkich punktów tej tarczy
jako
δ
6
.
•
Środek chwilowego obrotu tarczy II musi leżeć na prostej pionowej przechodzącej przez
punkt D. Jedn
ocześnie, (ponieważ środek obrotu tarczy I leży w podporze A) środek
obrotu tarczy II musi
leżeć na prostej AC. Te dwie proste przecinają się w punkcie C który
jest środkiem chwilowego obrotu tarczy II.
•
Wyznaczamy prędkość kątową
m
m
D
O
D
δ
δ
ω
2
3
6
v
2
2
=
=
=
, zwrot przyjmujemy tak aby przy
obrocie wokół O
2
zgadzał się zwrot prędkości
D
v .
•
Prędkość kątowa
2
ω
pozwala wyznaczyć przemieszczenia wirtualne punktów tarczy II.
• Tarcza I jest nieruchoma pon
ieważ ma dwa nieruchome punkty A i C.
Zapisujemy zasadę prac wirtualnych dla układu:
(
)
δ
δ
δ
δ
δ
δ
δ
∀
=
+
+
−
=
⋅
+
⋅
+
⋅
−
=
=
∑
0
18
24
6
3
6
6
4
6
kN
kN
H
kN
kN
H
F
L
B
B
i
i
kN
H
kN
kN
H
B
B
7
0
18
24
6
=
→
=
+
+
−
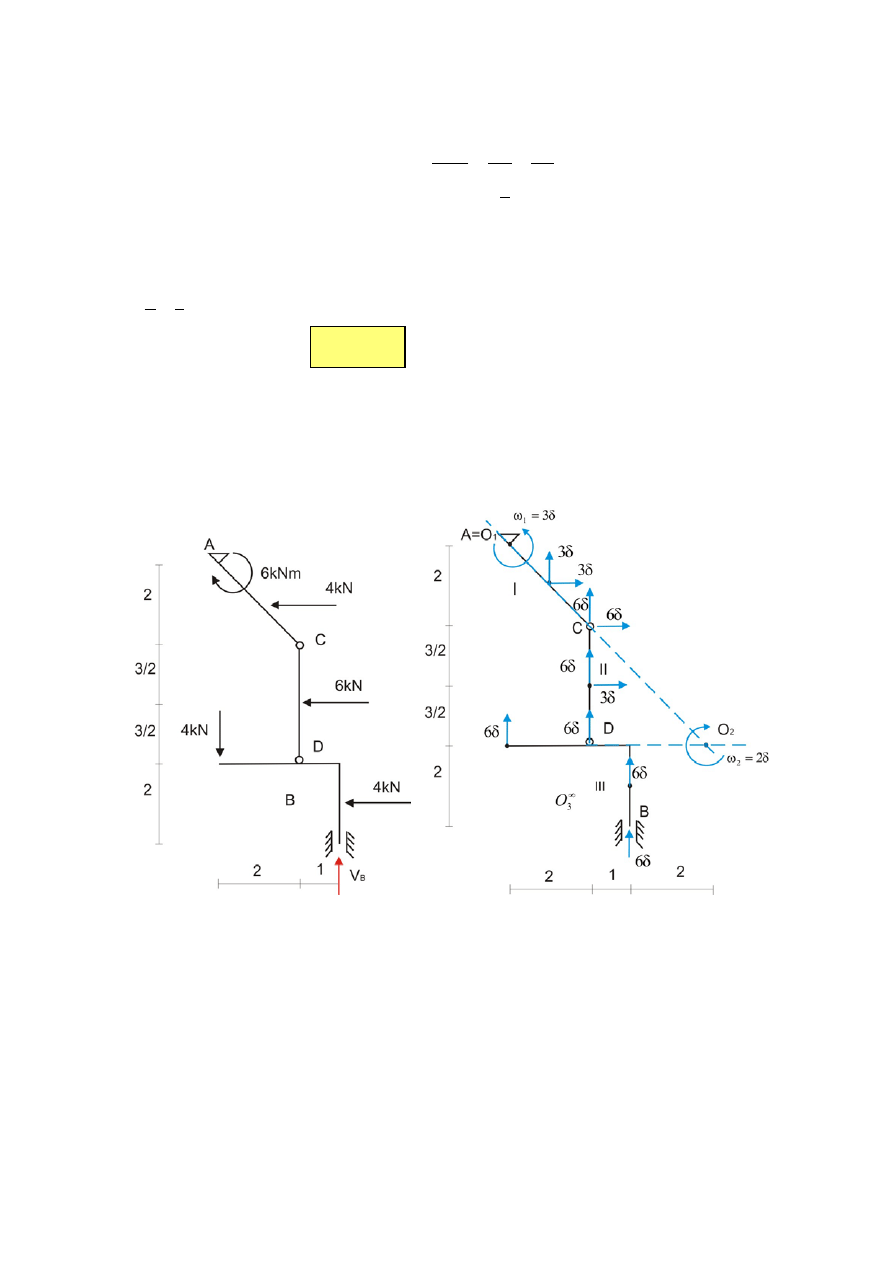
4. Wyznaczanie reakcji V
B
Utwierdzenie w punkcie B zastępujemy utwierdzeniem z przesuwem pionowym. Do układu sił
czynnych dodajemy reakcję V
B
(rys. 8).
Rys. 8 Rys.9
Wyznaczanie przemieszczeń wirtualnych (prędkości możliwych) układu (rys.9).
•
Analizę możliwych prędkości układu zaczynamy od tarczy III która porusza się przez
pionową translację. Przyjmujemy przemieszczenia wirtualne wszystkich punktów tej tarczy
jako
δ
6
.
•
Środek chwilowego obrotu tarczy II musi leżeć na prostej poziomej przechodzącej przez
punkt D. Jednocześnie, (ponieważ środek obrotu tarczy I leży w podporze A) środek
obrotu tarczy II musi
leżeć na prostej AC. Te dwie proste przecinają się w punkcie O
2
który
jest środkiem chwilowego obrotu tarczy II.
•
Wyznaczamy prędkość kątową
m
m
D
O
D
δ
δ
ω
2
3
6
v
2
2
=
=
=
, zwrot przyjmujemy tak aby przy
obrocie wokół O
2
zgadzał się zwrot prędkości
D
v .
•
Prędkość kątowa
2
ω
pozwala wyznaczyć przemieszczenia wirtualne punktów tarczy II ( w
tym przegubu C).
•
Tarcza I obraca się wokół punktu A. Wyznaczamy jej prędkość kątową
m
m
C
O
C
O
X
CY
C
δ
δ
ω
3
2
6
)
(
v
v
1
1
1
=
=
=
=
, zwrot przyjmujemy tak aby przy obrocie wokół O
1
zgadzał się zwrot prędkości
C
v .
Zapisujemy zasadę prac wirtualnych dla układu:
(
)
δ
δ
δ
δ
δ
δ
δ
δ
δ
∀
=
−
−
−
−
=
=
⋅
−
⋅
−
⋅
−
⋅
−
⋅
=
=
∑
0
18
12
18
24
6
3
6
3
4
3
6
6
4
6
kN
kN
kN
kN
V
m
kNm
kN
kN
kN
V
F
L
B
B
i
i
kN
V
kN
kN
kN
kN
V
B
B
12
0
18
12
18
24
6
=
→
=
−
−
−
−
5. Wyznaczanie momentu M
B
Utwierdzenie w pun
kcie B zastępujemy podporą przegubową. Do układu sił czynnych dodajemy
moment utwierdzenia M
B
(rys. 10).
Rys. 10 Rys.11
Wyznaczanie przemieszczeń wirtualnych (prędkości możliwych) układu (rys.11).
•
Analizę możliwych prędkości układu zaczynamy od tarczy III która obraca się wokół
przegubu B. Przyjmujemy
prędkość kątową tej tarczy jako
m
δ
ω
6
3
=
.
•
Środek chwilowego obrotu tarczy II musi leżeć na prostej BD. Jednocześnie, (ponieważ
środek obrotu tarczy I leży w podporze A) środek obrotu tarczy II musi leżeć na prostej
AC. Te dwie proste przecina
ją się w punkcie O
2
który jest środkiem chwilowego obrotu
tarczy II.
•
Wyznaczamy prędkość kątową
m
m
D
O
D
O
Y
DX
D
δ
δ
ω
2
6
12
)
(
v
v
2
2
2
=
=
=
=
, zwrot przyjmujemy tak
aby przy obrocie wokół O
2
zgadzał się zwrot prędkości
D
v .
•
Prędkość kątowa
2
ω
pozwala wyznaczyć przemieszczenia wirtualne punktów tarczy II ( w
tym przegubu C).
•
Tarcza I obraca się wokół punktu A. Wyznaczamy jej prędkość kątową
m
m
C
O
C
O
Y
CX
C
δ
δ
ω
3
2
6
)
(
v
v
1
1
1
=
=
=
=
, zwrot przyjmujemy tak aby przy obrocie wokół O
1
zgadzał się zwrot prędkości
C
v .
Zapisujemy zasadę prac wirtualnych dla układu:
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
∀
=
+
+
+
+
+
=
=
⋅
+
⋅
+
⋅
+
⋅
+
⋅
+
⋅
=
=
∑
0
18
12
54
72
24
6
3
6
3
4
9
6
18
4
6
4
6
kN
kN
kN
kN
kN
m
M
m
kNm
kN
kN
kN
kN
m
M
F
L
B
B
i
i
kNm
M
kN
kN
kN
kN
kN
m
M
B
B
30
0
18
12
54
72
24
6
−
=
→
=
+
+
+
+
+
Zadania do samodzielnego rozwiązania:
Korzystając z zasady prac wirtualnych wyznacz reakcje podpór w zadaniach:
Zadanie 1 z pliku ‘zadania z reakcji 1.pdf’,
Zadania 1 i 2 z pliku ‘zadania z reakcji 2.pdf’.
Wyszukiwarka
Podobne podstrony:
zasady prac wirtualnych
1 Wyznaczanie wartości przyspieszenia ziemskiego g przy użyciu wahadła matematycznego instr przys
27 Wyznaczanie prędkości dźwięku w powietrzu w oparciu o efekt Dopplera i przy użyciu oscyloskopu
14, Studia, Pracownie, I pracownia, 14 Wyznaczanie przyspieszenia ziemskiego przy użyciu wahadła rew
WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO PRZY UŻYCIU WAHADŁA REWERSYJNEGO
Zasady i zalecnia dotyczace mocowania i przemieszczania poszkodowanych przy uzyciu noszy typu?ska
Wyznaczanie przyspieszenia ziemskiego2, Wyznaczanie przy˙pieszania ziemskiego za pomoc˙ wahad˙a rewe
Technika biurowa Zasady bezpieczeństwa i higieny pracy obowiązujące przy użyciu i obsłudze sprzętu
Ćw 1 Pomiar strumienia objętości i masy płynu przy użyciu rurek spiętrzających
Wykonywanie robót ziemnych przy użyciu koparek
Cele nauczania wyrażone przy użyciu czasowników operacyjnych, edukacja specjalna
Pomiary wykonaliśmy przy użyciu suwmiarki oraz mikrometru
Metoda mostkowa przy użyciu technicznego mostka Wheatstone
Programowanie sieciowe przy użyciu gniazdek w?lphi 3 MPLMRFGCOQC4VOMKHU5DAT5YKUDWUHLWUTINXRI
Cw 4 Karta Pomiary temperatury przy uzyciu
ABC zasad bezpieczenstwa przetwarzania danych osobowych przy uzyciu systemow
Identyfikacja miejskiej przestrzeni publicznej przy użyciu alternatywnych form oświetlenia
2006 06 RSA w PHP chronimy nasze dane przy użyciu kryptografii asymetrycznej [Kryptografia](1)
więcej podobnych podstron