http://www.instructables.com/id/wired-controlled-manual-robot/
wired controlled manual robot
on February 11, 2015
Table of Contents
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Intro: Wired controlled manual robot
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Step 5: Dpdt switch connection
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
http://www.instructables.com/id/wired-controlled-manual-robot/
Intro:
Wired controlled manual robot
Hi guys ! In this tutorial we will present you the very basic wired controlled robot(often called manual robot). Hope, each and every one of us would have played with toy
cars in our childhood. we will be building one such in a matter of 30 minutes. This is a very simple DIY activity which even school students could try out. why wait ?? Lets
get started.
Step 1:
Things required
To build this, you will need
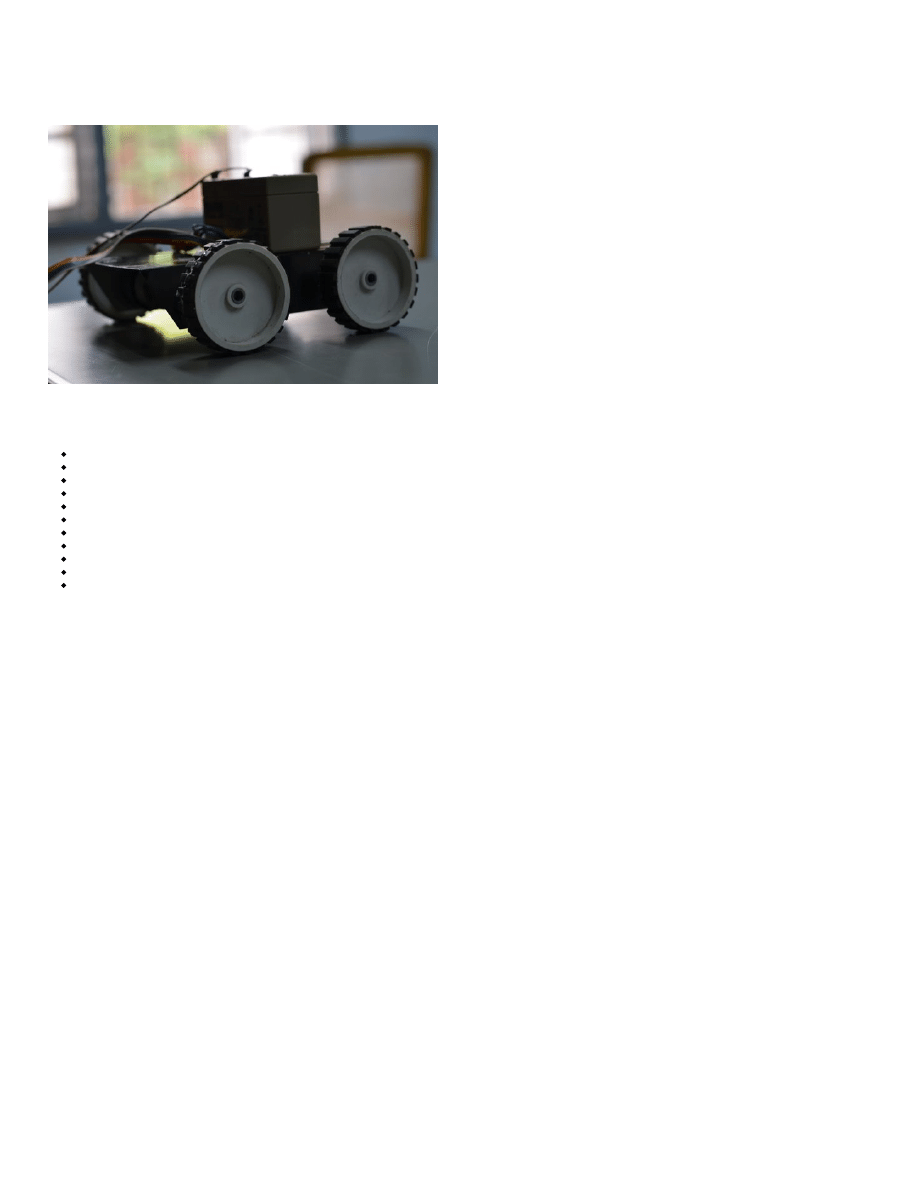
300 rpm DC geared motors - 4 nos
7 cm diameter plastic wheel - 4 nos
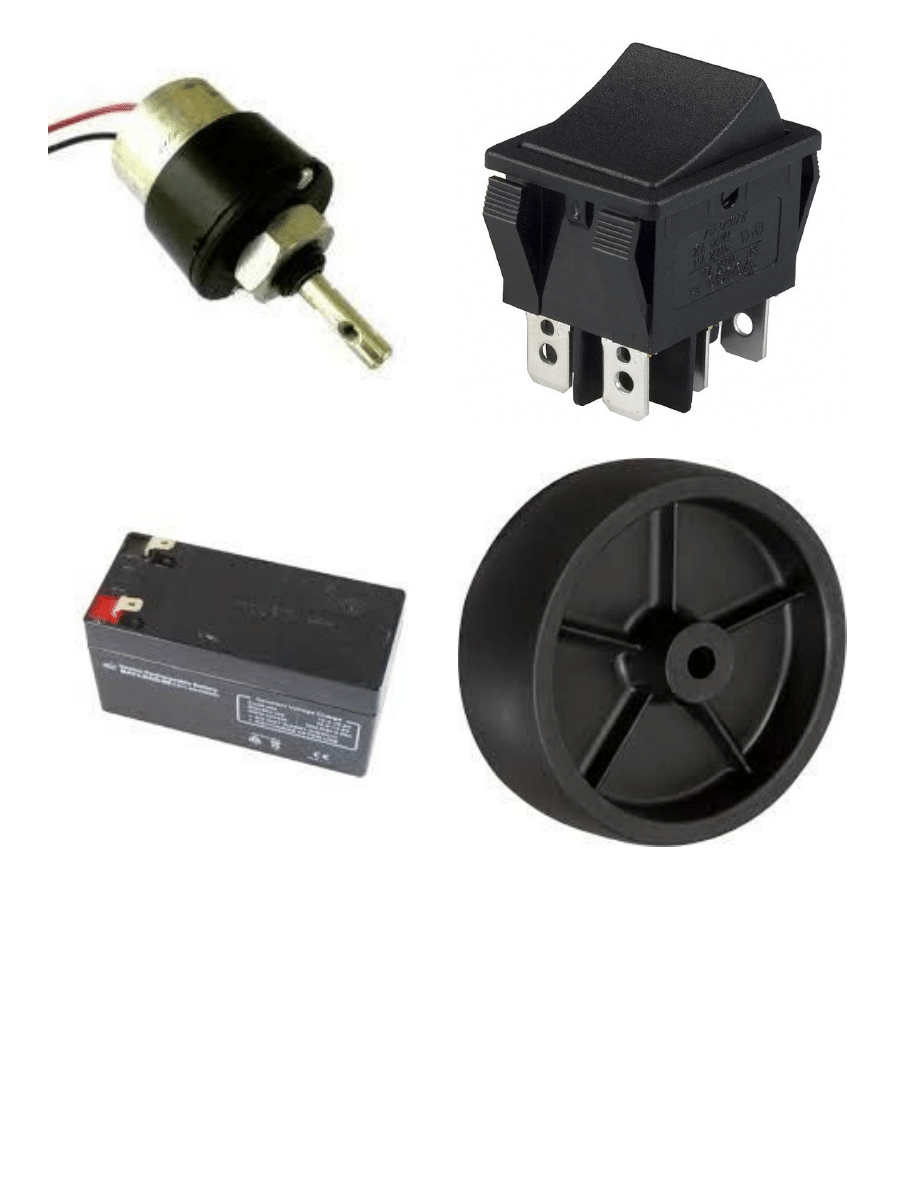
metal chassis(robot body)
3 m rainbow wire
12 v DC battery
Double pole double throw switch (DPDT) - 2 nos
DPDT Switch box
Soldering rod
Soldering lead
wire cutter
multimeter
Additionally you will need some tools like screw driver and spanner. All these components are easily available at any local store. you can even get these online !
Grab all these and you are ready to build your own robot .
Step 2:
Components
X
X
DC geared motor :
Lets start with the basic definition, motor is a machine which will convert electrical energy into mechanical. Thus by simply providing electrical energy, we will make the
motor shaft rotate. Here we’ll be working with geared motors. This type of motors will use gears in it. something similar to one we see in old clocks, machines and even
in some branded watch.
A motor does not specifically have its terminals defined. i.e you can provide either positive or negative supply to any of the terminal which will decide it's direction of
rotation. For example if the two terminals in the motor are named 1 and 2 then when terminal 1 is connected to positive and 2 to negative, the shaft rotates in clock wise
direction and vice versa when the connection is reversed.
metal chassis :
This will be the body of our robot. One i am using here is a ready made chassis which has provisions for mounting motors. You can even make your own custom chassis
using something like a mica sheets or wood.
Dc battery:
This will provide the necessary electrical energy for the motors to operate.
DPDT switch :
This is one of the important component in building the robot ! This is the switch which we will be using in order to control our robot. As the name says, it is double pole
double throw switch. By using this, we will be able to control the control direction like, it can rotate either clockwise or counter clockwise. We will discuss about this
connection later.
Soldering rod :
Soldering rod is used to solder wires to motors.
http://www.instructables.com/id/wired-controlled-manual-robot/
http://www.instructables.com/id/wired-controlled-manual-robot/
Step 3:
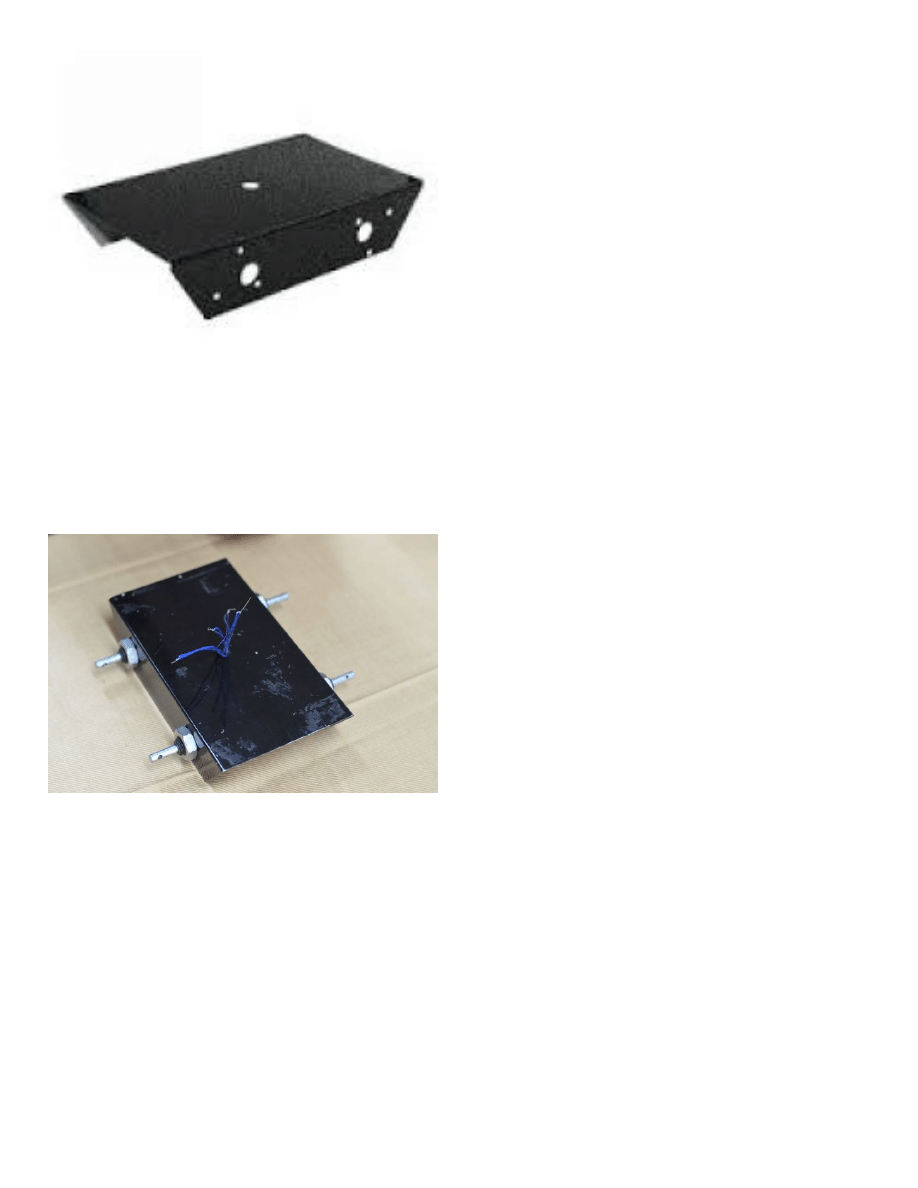
Mechanical assembly
Since our chassis is ready made, we don't have much work in assembling the robot. It has provisions for everything.
Just place all the motors in their respective places and we are done !
Step 4:
Motor connection
Differential drive :
Here we will be using the differential drive or four wheel drive to control our robot. In which we will be driving all the four motors simultaneously to achieve all the basic
four controls(forward, reverse, left and right). wilh a special case for left and right (arc left and arc right). we will discuss about this in detail later. regarding the motor
connection, we have to couple the two motors on either side of the chassis. For this, consider the two motors on left side. power it using battery and find out the two
terminals to which + and - terminals of battery is connected such that the motor rotates (say clockwise direction) similarly do it for other motor and make a note of the
connection. now connect two terminals to which +ve terminal of battery was connected and two other terminals to which -ve terminal of battery was connected, and now
we have only two terminals on either side. upon providing supply using battery, motors in one side rotate in same direction. Perform the similar setup for the other two
motors on right side of the chassis. You are done with motor connection.
let's proceed with the switch connection !
http://www.instructables.com/id/wired-controlled-manual-robot/
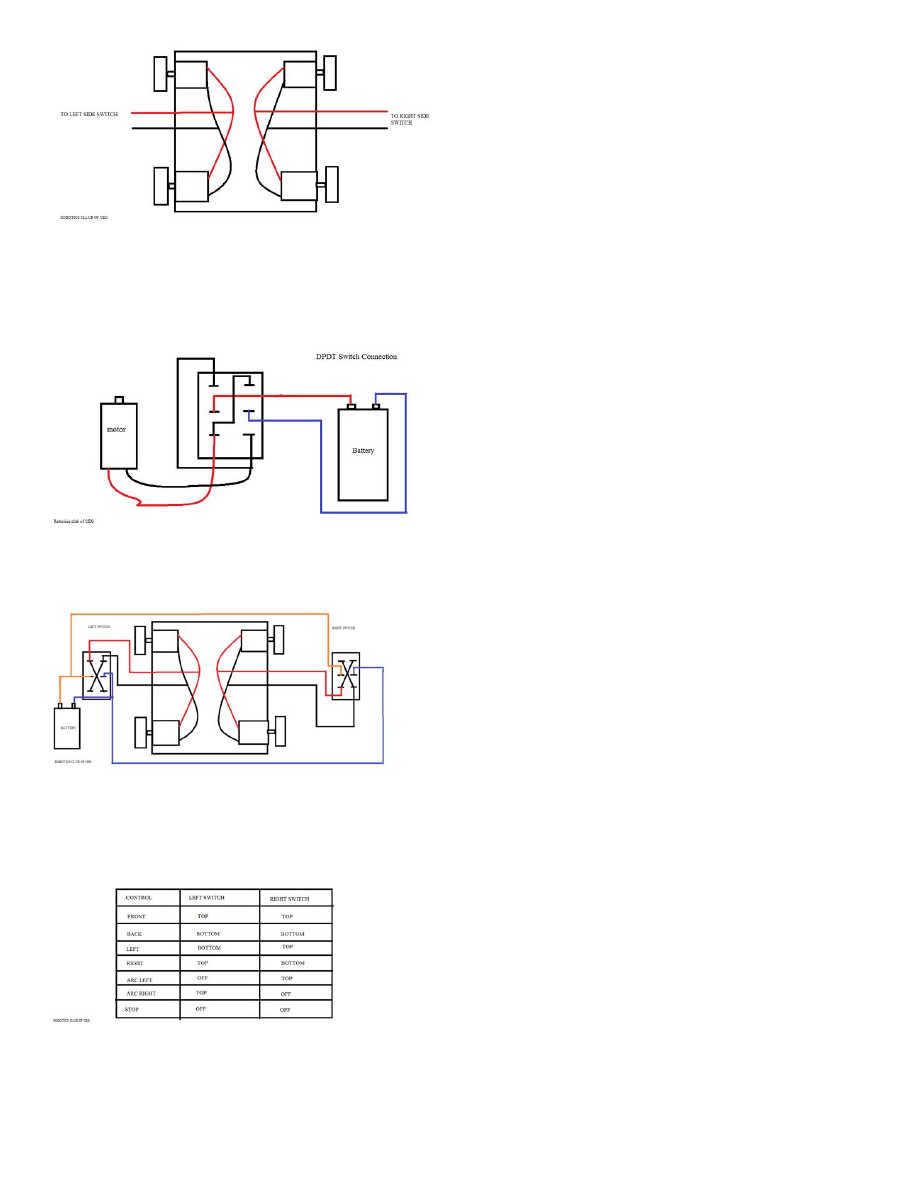
Step 5:
Dpdt switch connection
Since we are now familiar with how the dpdt switch works, we will now proceed with how to connect this switch in order to do our manual robot ! as we know the dpdt
switch has 6 terminals. The pins gets connected in a way as shown in the figure depending upon the way it is pressed. In order to control the motor both ways(clockwise
and anti-clockwise) we need this switch. The center terminal of the switch is connected to battery while the extreme terminals goes to motor as shown in the figure. This
is done for one side ! Perform another similar connection for the other side motor.
Step 6:
Overall connection
The figure shows the overall connection of the robot. As you can see, we have two switches in order to control the robot
Step 7:
Switch control
As said earlier, we have to control all the four motors simultaneously in order to achieve differential drive. For which, the two dpdt switches has to be controlled in a way
as mentioned in the table !
http://www.instructables.com/id/wired-controlled-manual-robot/
Step 8:
Testing/Demo
Finally it's time to see our bot in action ! attach wheels to the motor shaft, connect your battery and test your robot :)
Below is a video on how to build the robot and it's demo !
Hope, you all enjoyed building the robot ! Feel free to post your doubts.
Related Instructables
Wired control
robot manual
(video)
by
by
by
by
Robot Cloning
by DIY 3d
printers!
by
Advertisements
Comments
1 comments
says:
Very nicely done! This looks like a great robot for beginner to build.
But what's up with that spammy link in step 2? You should delete that, as it just distracts from an otherwise very well-done first instructable. :)
Wyszukiwarka
Podobne podstrony:
Remote Controlled Microbit Robot
COMBAT AND OPERATIONAL STRESS CONTROL MANUAL FOR LEADERS AND SOLDIERS
EZX R Speed Control Manual [Search Manual Online Com]
Control of Redundant Robot Manipulators R V Patel and F Shadpey
( SPC ) STASTICAL PROCESS CONTROL REFERENCE MANUAL
robot draft manual v2
Control of Redundant Robot Manipulators R V Patel and F Shadpey
R J2 Controller Profibus DP Operator Manual [B 80844EN 03]
08 INSTRUCTION MANUAL TEMPERATURE CONTROL VALVE 12160 3078
Voice Control Robot in 7 Minutes
universal remote control 8 in 1 users manual 121714
(manual) Servo Control of a DC Brush Motor (Microchip, 1997)
Sole Control Sc230 Sc240 Sc241 Remote Programming Manual
Arduino Based Bluetooth Controlled Robot
Manual BlueSolar charge controller MPPT 75 50 EN NL FR DE ES SE A6
więcej podobnych podstron