PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
1
PikoCNC Board „E” v1.0
wersja 1.0
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
2
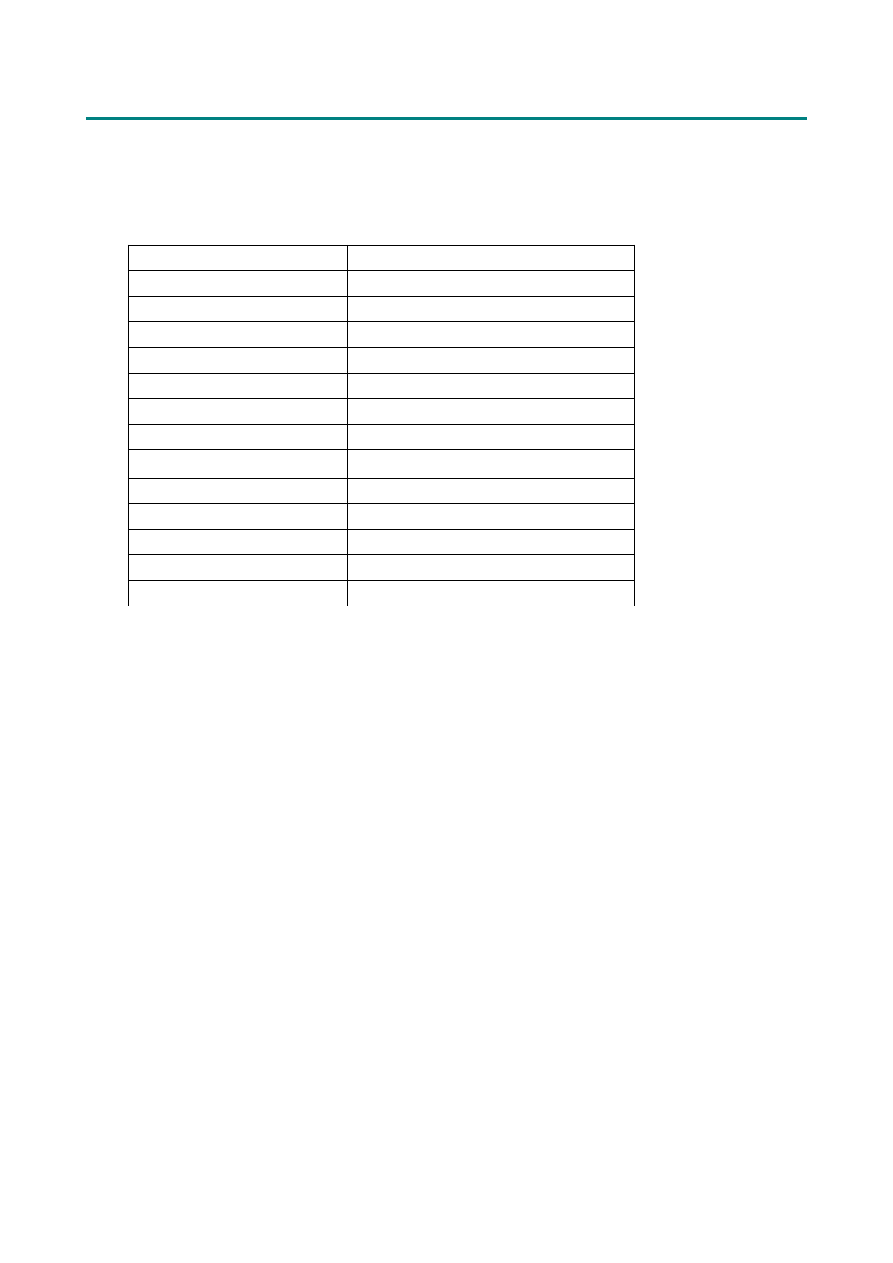
Podstawowe parametry
Rodzaj komunikacji
ETHERNET
Rodzaj sterowania
STEP / DIR
Liczba obsługiwanych osi
5*
Max częstotliwość STEP
225Khz
Oś techniczna
TAK
Max ilość instrukcji PLC
150
Liczba wejść
18
Liczba wyjść
7
Max obciążenie wyjścia
100mA
Wyjście 0-10V
TAK
Liczba wejść analogowych
3 (2 x 0-5V, 1 x 4-20mA)
Zasilanie CPU
24 V DC +/-10% 100mA
Zasilanie I/O
24 V DC +/-10% 300mA
Wymiary (mm)
150x100mm
(*) Piąta oś „B” może służyć wyłącznie jako „slave” innej osi.
Wstęp
Dokument objaśnia tylko stronę fizyczną podłączenia danych elementów do kontrolera.
Stronę programową można znaleźć w dokumencie „PLC_manual”
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
3
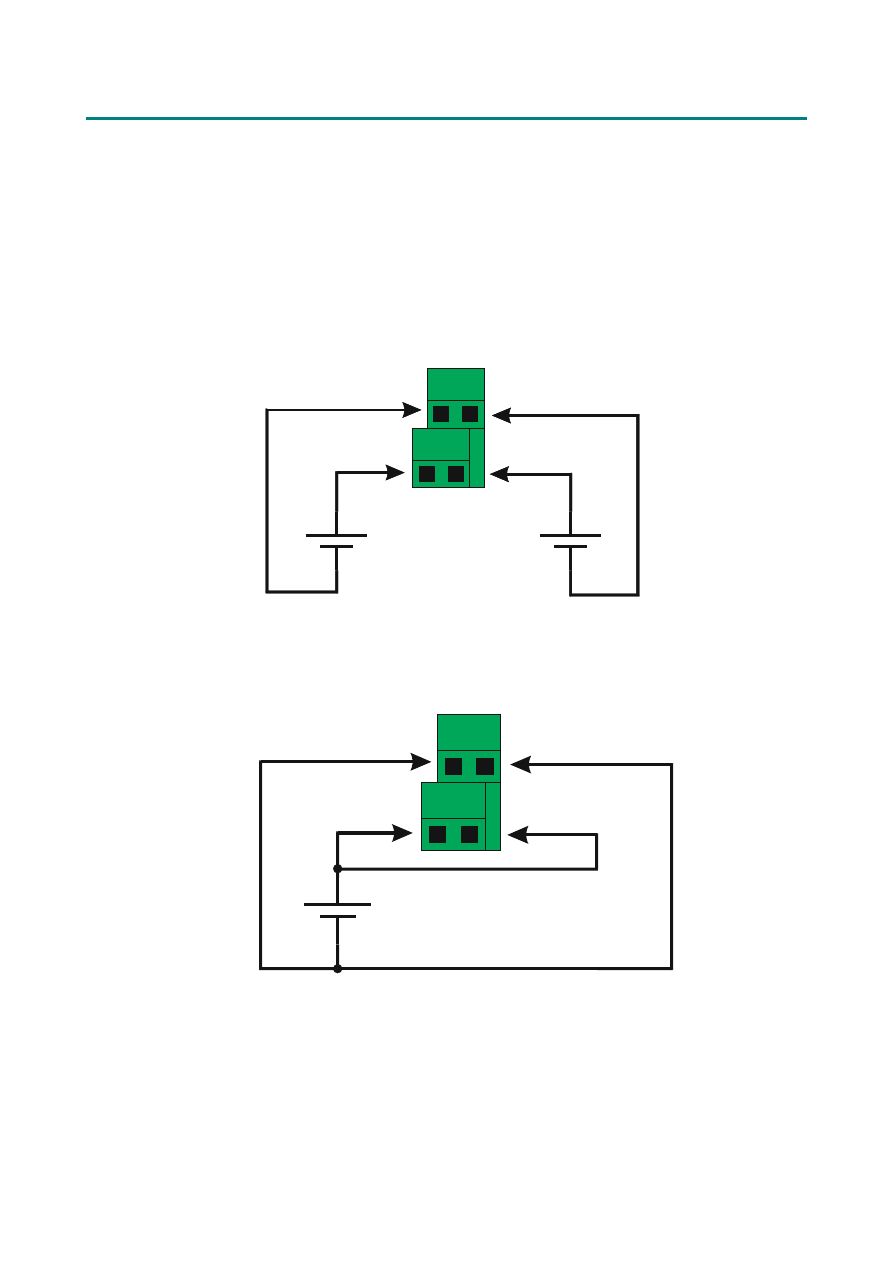
Zasilanie kontrolera
Kontroler posiada dwa niezależne obwody zasilania: jeden dla części cyfrowej (CPU) drugi
dla wejść/wyjść (I/O). Aby uzyskać separacje galwaniczną obu części musimy zastosować
dwa zasilacze, jeśli nie zależy nam na izolacji wystarczy jeden.
Wariant z dwoma zasilaczami.
Wariant z jednym zasilaczem.
+
+
CPU_VCC
CPU_GND
IO_GND
IO_VCC
24V DC
24V DC
+
+
CPU_VCC
CPU_GND
IO_GND
IO_VCC
24V DC
24V DC
+
CPU_VCC
CPU_GND
IO_GND
IO_VCC
24V DC
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
4
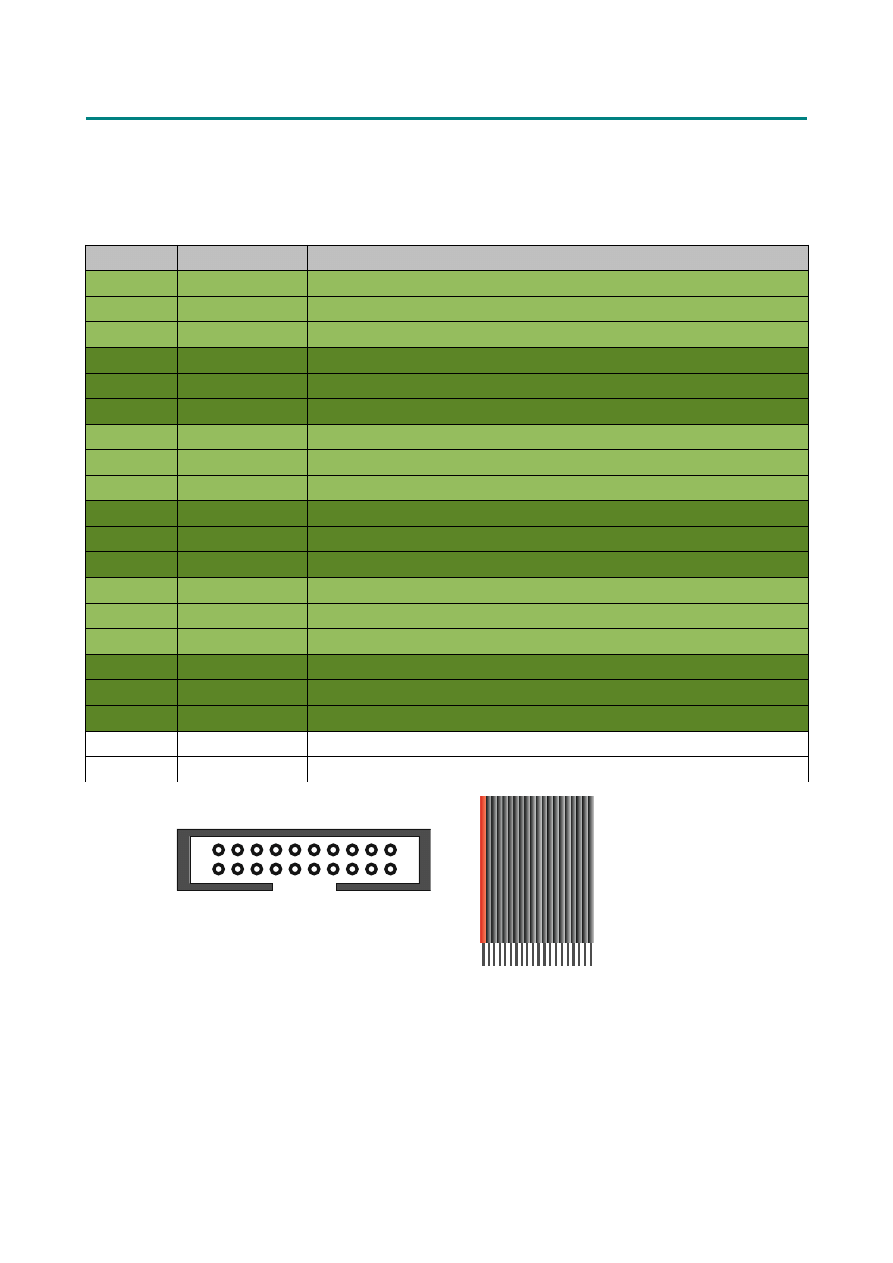
Złącze „Motors”
Rozkład wyprowadzeń na złączu Motors:
Numer
Symbol
Opis
1
COM
Połączenie wspólne dla wszystkich sygnałów.
2
STEP_0
Sygnał STEP kanału #0
3
DIR_0
Sygnał DIR kanału #0
4
COM
Połączenie wspólne dla wszystkich sygnałów.
5
STEP_1
Sygnał STEP kanału #1
6
DIR_1
Sygnał DIR kanału #1
7
COM
Połączenie wspólne dla wszystkich sygnałów.
8
STEP_2
Sygnał STEP kanału #2
9
DIR_2
Sygnał DIR kanału #2
10
COM
Połączenie wspólne dla wszystkich sygnałów.
11
STEP_3
Sygnał STEP kanału #3
12
DIR_3
Sygnał DIR kanału #3
13
COM
Połączenie wspólne dla wszystkich sygnałów.
14
STEP_4
Sygnał STEP kanału #4
15
DIR_4
Sygnał DIR kanału #4
16
COM
Połączenie wspólne dla wszystkich sygnałów.
17
STEP_TAX
Sygnał STEP osi technicznej
18
DIR_TAX
Sygnał DIR osi technicznej
19
CPU_GND
GND
20
CPU_VCC
+5V
Na złączu sygnały rozmieszczono tak aby można było łatwo rozdzielić taśmę na sześć
części (po 3 linie) i w prosty sposób połączyć z poszczególnymi sterownikami osi.
Do wyjść „+5V” absolutnie nie należy podłączać jakichkolwiek zewnętrznych źródeł
napięcia.
UWAGA ! Piąta oś „B” może służyć wyłącznie jako „slave” innej osi !
1
2
19
20
1
20
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
5
Połączenie zakończeń taśmy z listwami zaciskowymi: obrobione
końcówki taśmy warto zaopatrzyć w końcówki tulejkowe. Najlepiej
zastosować rurki o takiej średnicy aby w środek mieściła się także (na
styk) izolacja żyły. Zagniecenie rurki wraz z krótkim odcinkiem izolacji
daje bardzo trwałe i pewne zakończenie taśmy.
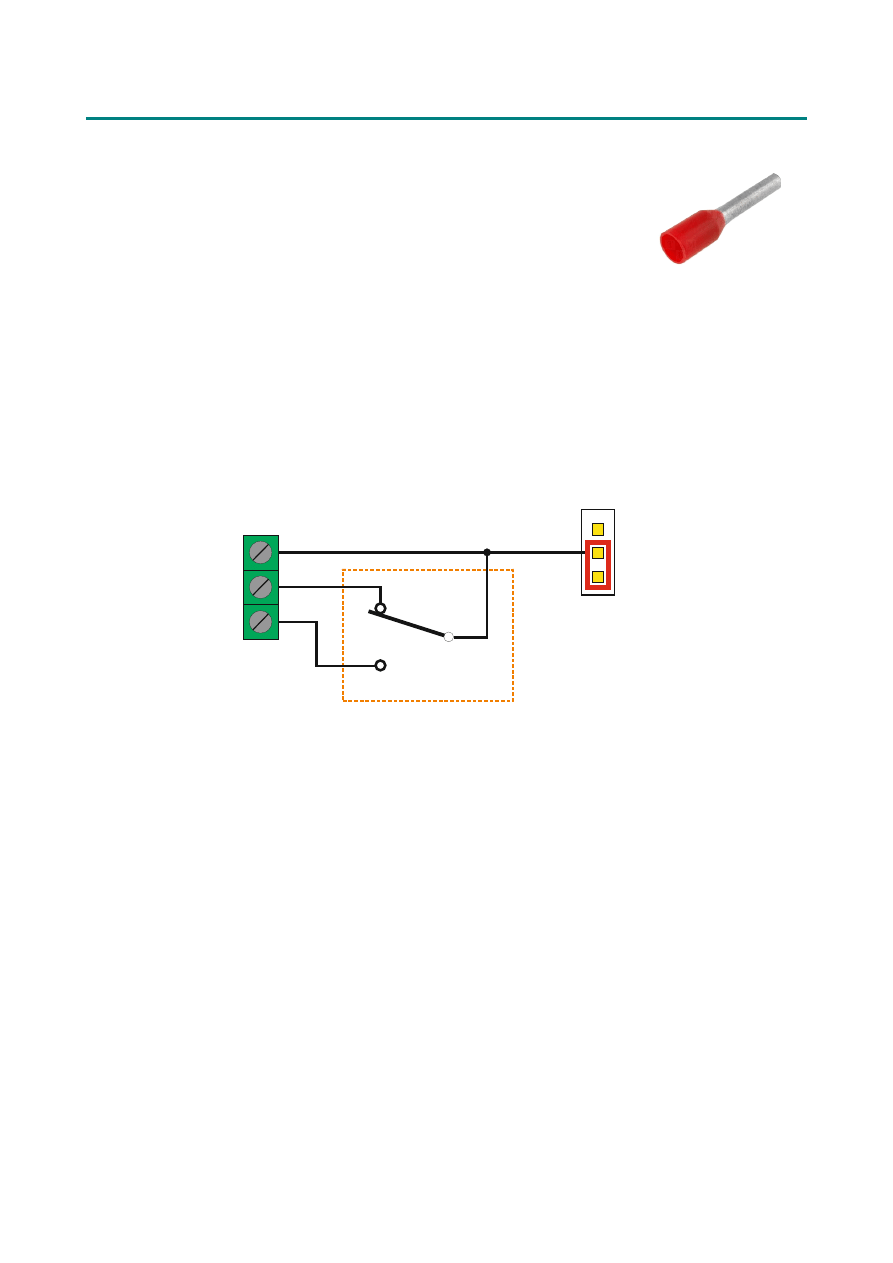
Wyjście „ENABLE”
Schemat wewnętrzny wyjścia obsługującego sygnał „Enable”.
Zworką SW_2 możemy wybrać potencjał wejścia E_CM.
Jeżeli do wejścia E_CM na
listwie ma być podłączony zewnętrzny potencjał - musimy całkowicie zdjąć zworkę ze
złącza SW_2 !
Z Poziomu PLC przekaźnikiem na wyjściu „Enable” steruje wyjście OUT 7.
E_CM
E_NO
E_NC
SW_2
CPU_+5V
CPU_GND
PK
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
6
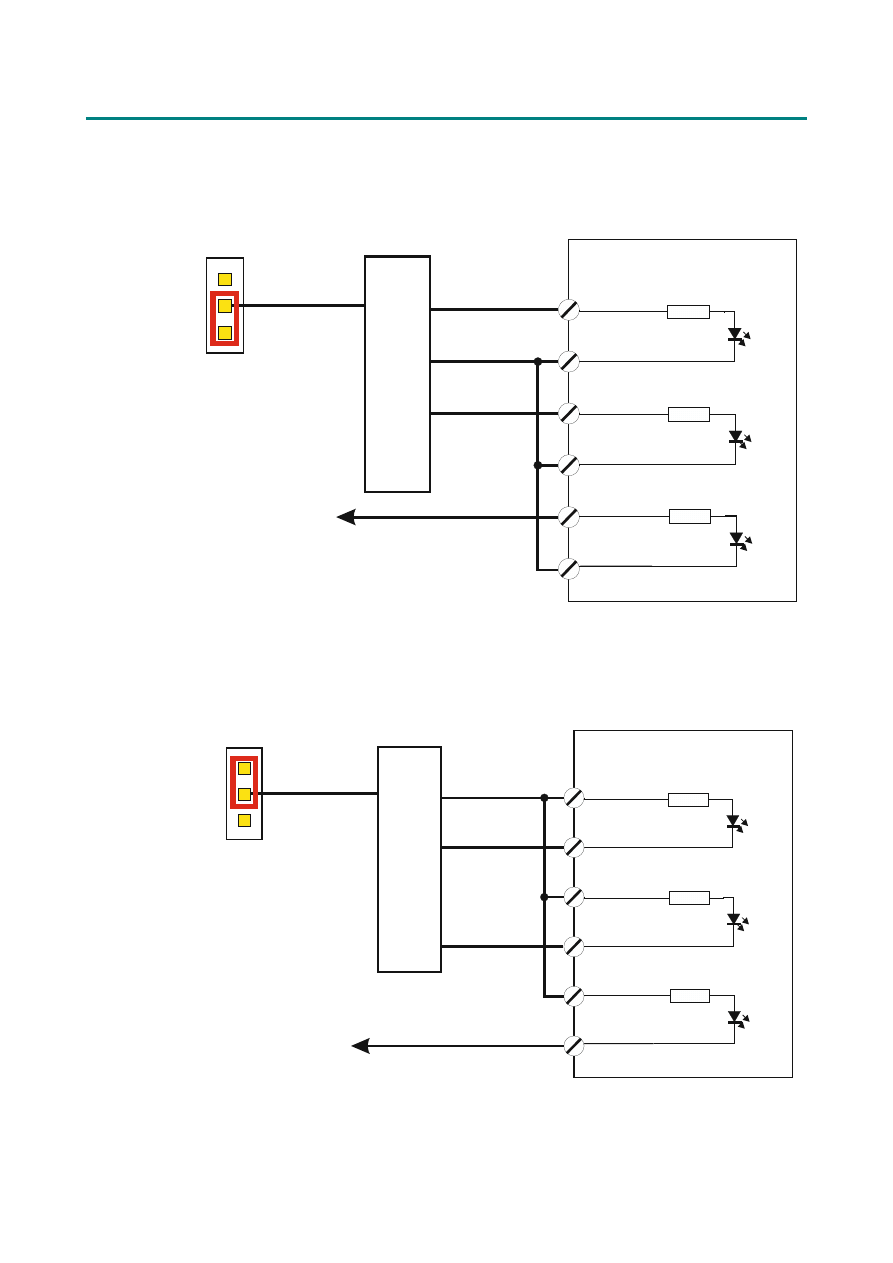
Sposób podłączenia typowego drivera z optoizolacją
Wariant ze zworką SW_1 w pozycji CPU_GND
(*) Zależnie od modelu drivera
Wariant ze zworką SW_1 w pozycji CPU_+5V
(*) Zależnie od modelu drivera
DRIVER
PUL+
PUL-
DIR+
DIR-
ENA+
ENA-
STEP
DIR
COM
SW_1
CPU_+5V
CPU_GND
COM
MOTORS
E_NC/E_NO*
SW_2=+5V
DRIVER
PUL+
PUL-
DIR+
DIR-
ENA+
ENA-
STEP
DIR
COM
SW_1
CPU_+5V
CPU_GND
COM
MOTORS
E_NC/E_NO*
SW_2=CPU_GND
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
7
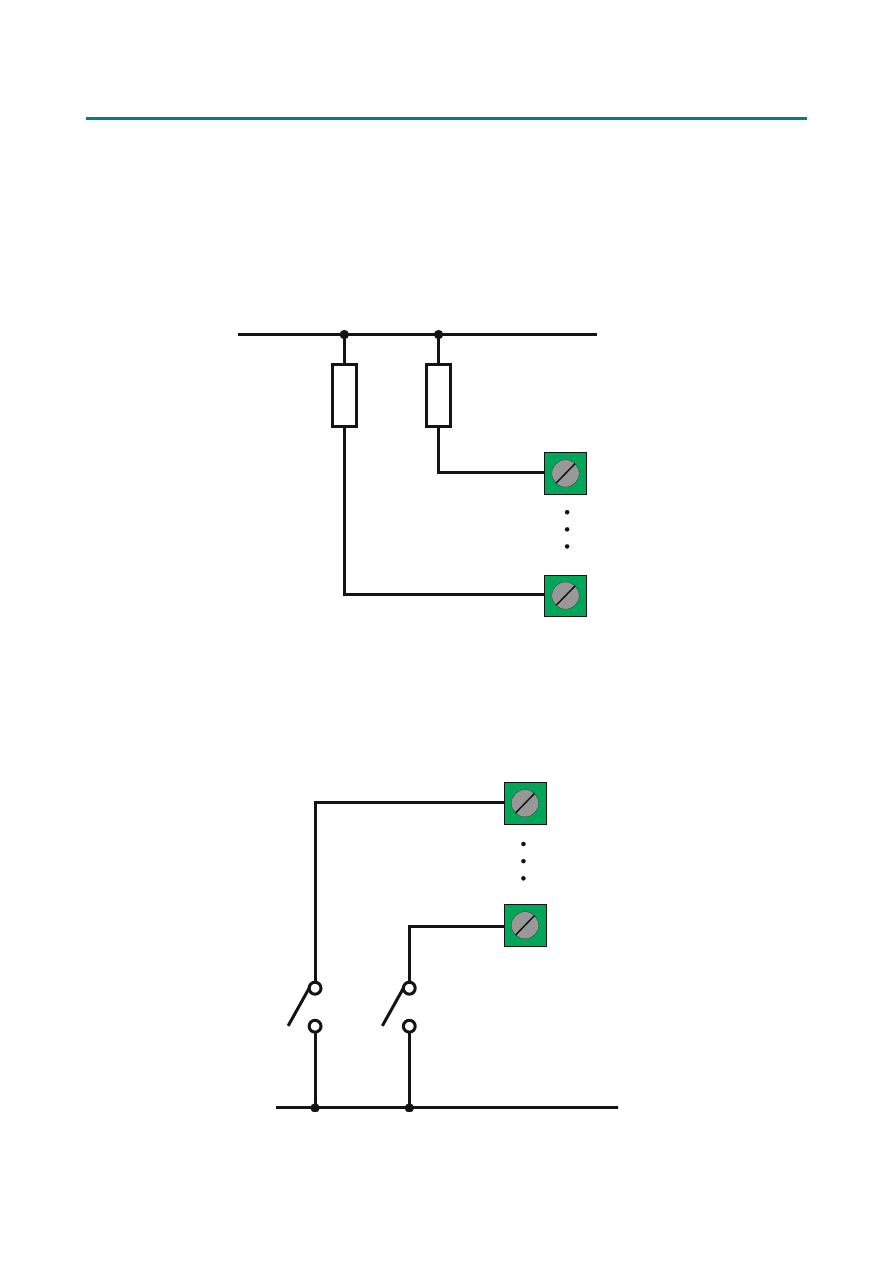
Listwy zaciskowe IN/OUT
Schemat podłączenia cewek przekaźników do wyjść.
Wszystkie wyjścia są w standardzie 24V zatem na takie napięcie muszą być cewki
przekaźników, lampki kontrolne czy inne podłączane obciążenie.
Schemat podłączenia do wejść styków mechanicznych: przycisków,
krańcówek, czujników.
Wszystkie wejścia są w standardzie 24V.
IO_VCC
OUT 0
OUT n
Pk 0
Pk n
...
IN n
IN 0
IO_GND
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
8
Schemat podłączenia do wejść czujników zbliżeniowych (indukcyjnych)
UWAGA ! Czujniki indukcyjne mogą być wyłącznie typu NPN !
Schemat podłączenia impulsatora mechanicznego do kontrolera (24
imp/obr).
IN n
IN 0
IO_GND
OUT
VCC
GND
OUT
VCC
GND
IO_VCC
blue
brown
black
A B
2 x 100nF
IN n
IN m
IO_GND
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
9
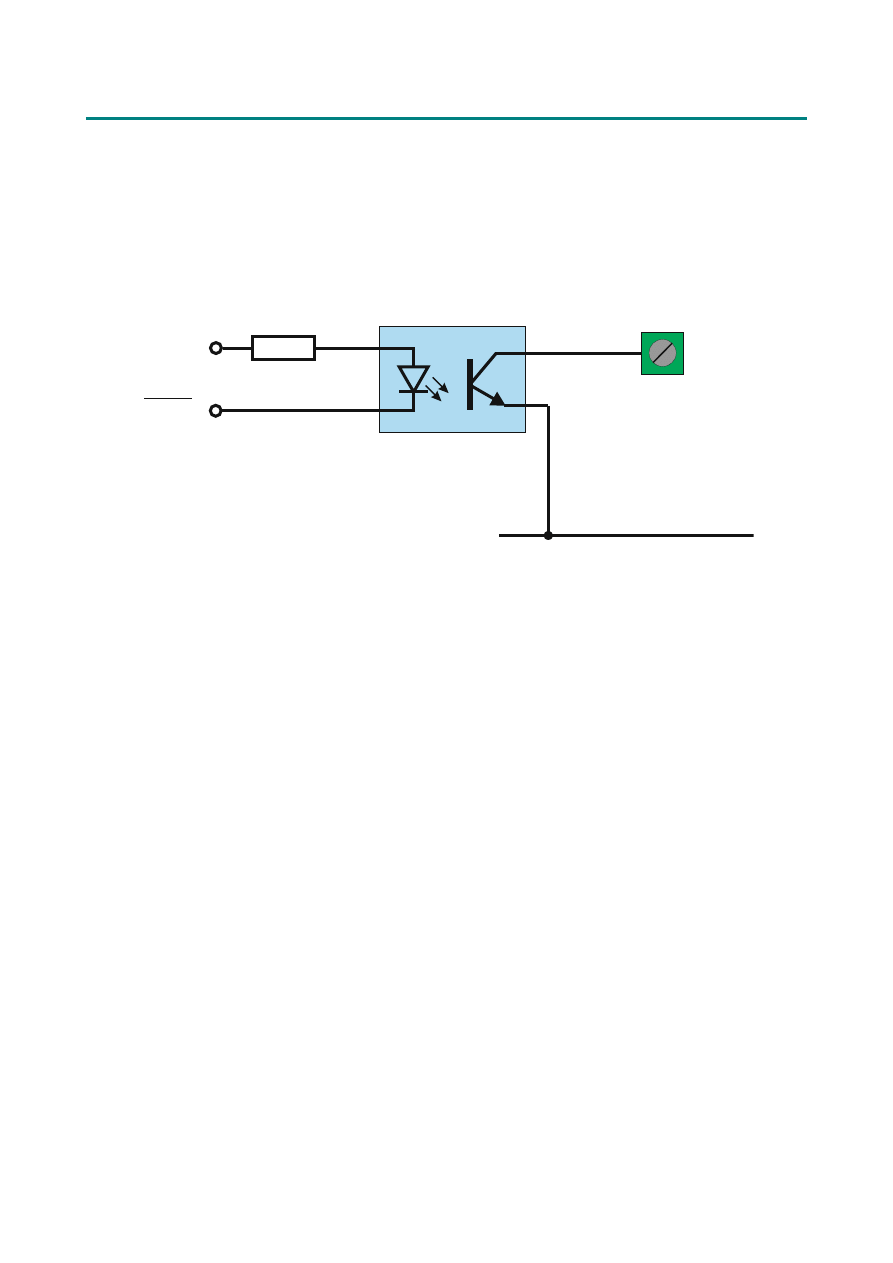
Schemat podłączenia wyjścia indeks enkodera
Do płyty nie możemy bezpośrednio podłączyć sygnału indeks z enkoderów jak to było w
wcześniejszych wersjach kontrolera ! Należy zrobić to przez transoptor w schemacie jak
na rysunku.
IN n
IO_GND
220R
INDX
INDX
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
10
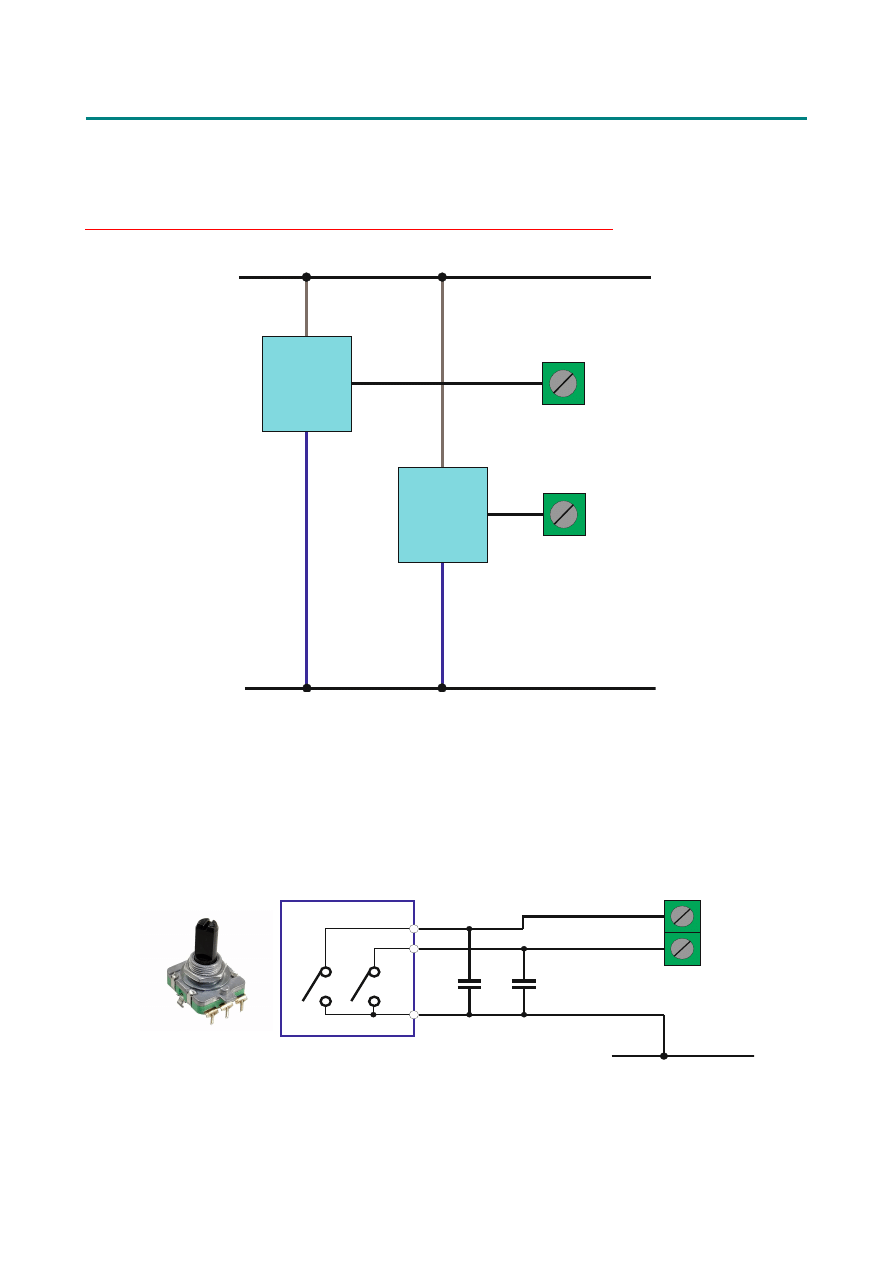
Listwa zaciskowa AnalogIN
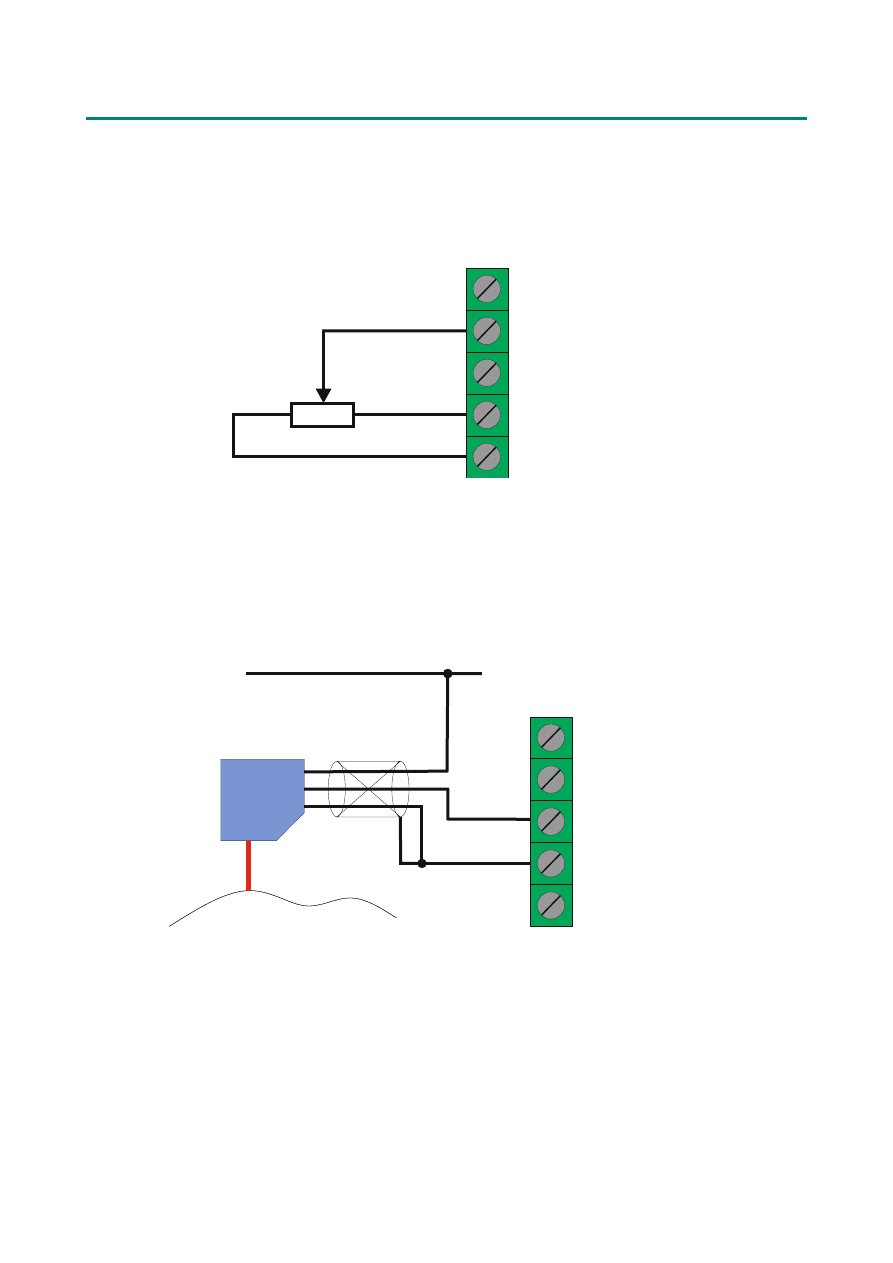
Schemat podłączenia potencjometru do wejścia analogowego
Schemat podłączenia dalmierza laserowego z wyjściem 4-20mA do
wejścia analogowego
CH_0 (4-20mA)
CPU_+5V
CPU_GND
CH_1 (0-5V)
CH_2 (0-5V)
1K - 4,7K
CH_0 (4-20mA)
CPU_+5V
CPU_GND
CH_1 (0-5V)
CH_2 (0-5V)
GND
OUT
VCC
CPU_VCC
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
11
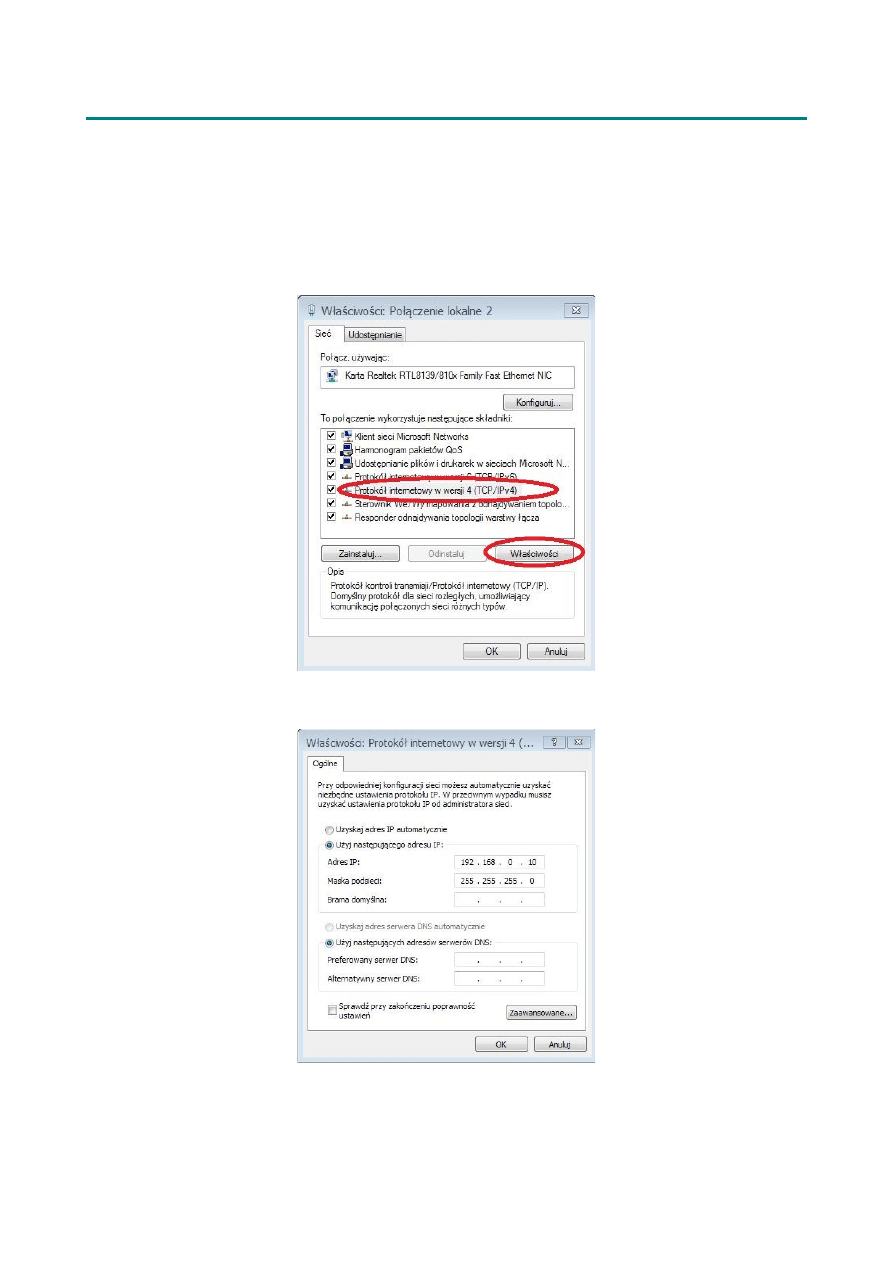
Konfiguracja połączenia sieciowego
Otwieramy okno połączenia sieciowego naszej karty (ethernetowej). Następnie zaznaczmy
na liście „Protokół internetowy w wersji 4 (TCP/IPv4)” i klikamy na „Właściwości”.
Okno, które się pojawi wypełniamy jak niżej:
Czyli - Adres IP: 192.168.0.10 Maska: 255.255.255.0 Pozostałe pola zostawiamy puste.
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
12
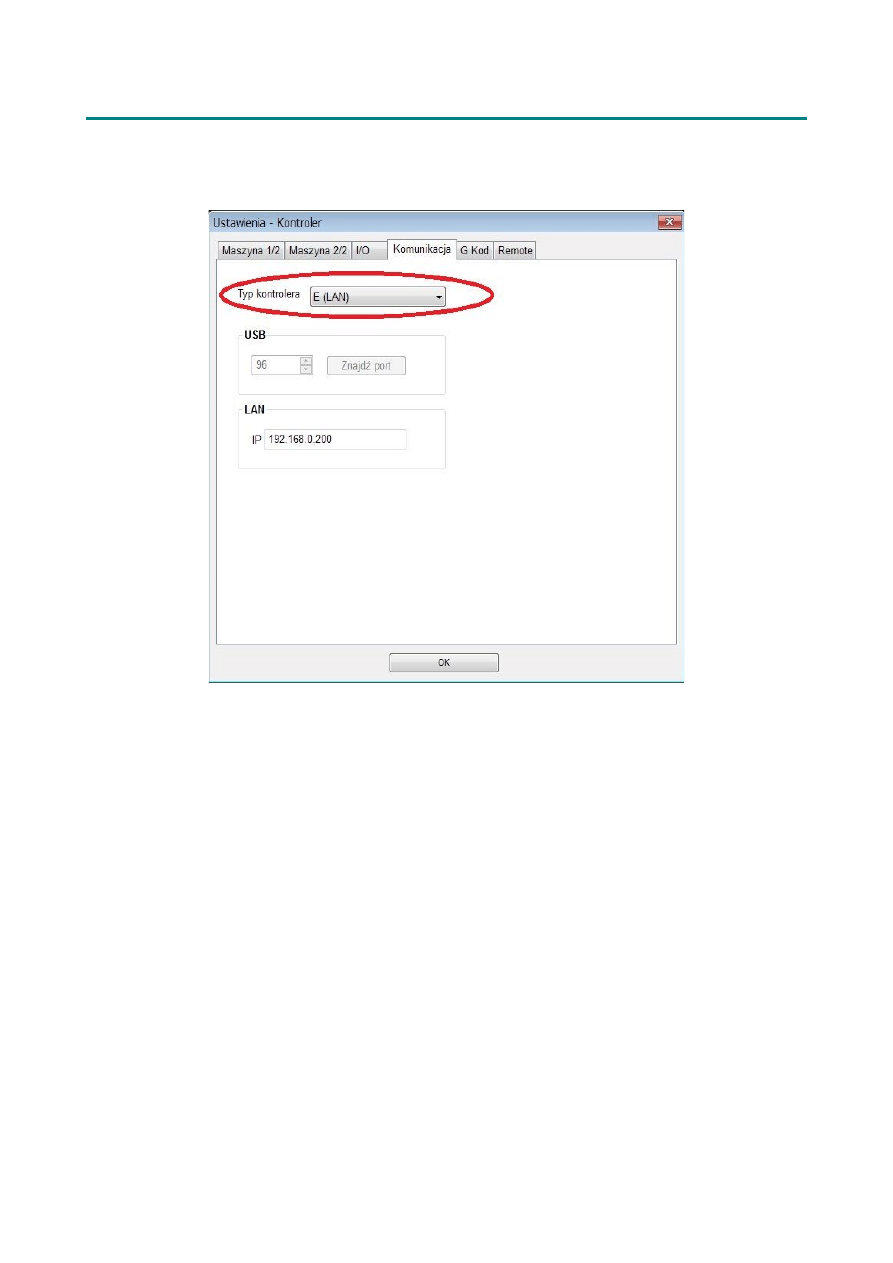
Dodatkowo w ustawieniach „Komunikacja” programu sterującego należy zaznaczyć
odpowiedni typ kontrolera:
Do połączenia komputera z kontrolerem należy użyć niekrosowanego (1:1) kabla UTP
najlepiej ekranowanego (F/UTP).
Aktualizacja FirmWare
Do aktualizacji wewnętrznego oprogramowania sterownika służy program
„FWupdate_LAN”. Aby wprowadzić sterownik w tryb aktualizacji należy przy wyłączonym
zasilaniu sterownika przytrzymać przycisk „PROG” na jego płycie a następnie (cały czas
go trzymając) załączyć zasilanie sterownika. Przycisk należy trzymać tak długo, aż
zacznie mrugać dioda „STATE”, która sygnalizuje wejście w tryb (mruga 2x wolniej niż
normalnie). Następnie uruchomić program „FWupdate_LAN”, wybrać odpowiedni plik
firmware (pliki z rozszerzeniem „.wse”) i nacisnąć „programuj”. Po pomyślnym
programowaniu kontrolera zostanie on automatycznie zresetowany.
PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
13
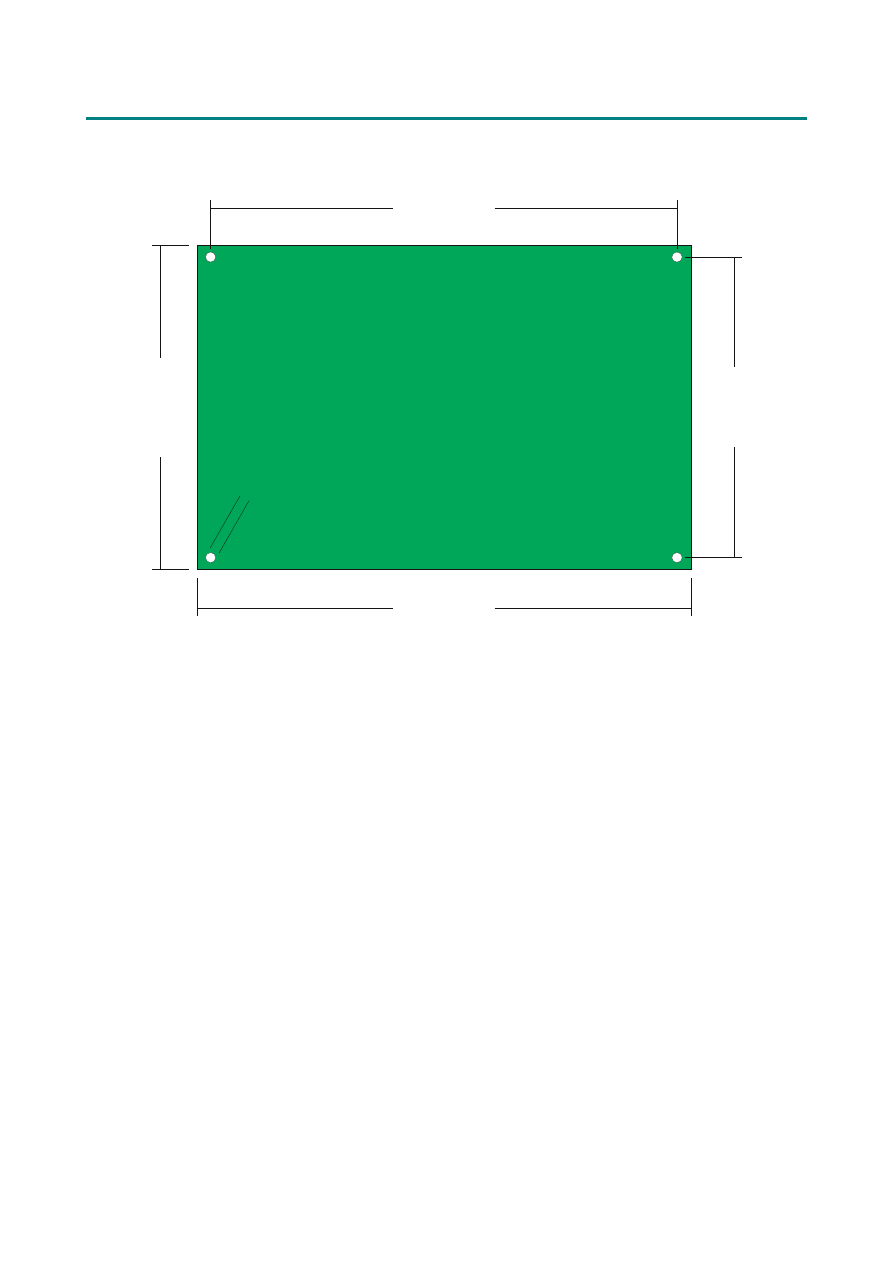
Wymiary płyty (mm)
PikoCNC E v1.0
140,97
92
,7
1
1
00
,0
0
149,25
3,10

PikoCNC Board „E” v1.0
Copyright © 2015 PPHU ELCOSIMO
14
PPHU ELCOSIMO
Andrzej Woźniak
ul. Zielona 1B
62-110 Damasławek
Document Outline
- PikoCNC Board „E” v1.0 Copyright © 2015 PPHU ELCOSIMO14
- Podstawowe parametry
- Wstęp
- Zasilanie kontrolera
- Złącze „Motors”
- Sposób podłączenia typowego drivera z optoizolacją
- Listwy zaciskowe IN/OUT
- Schemat podłączenia cewek przekaźników do wyjść.
- Schemat podłączenia do wejść styków mechanicznych: przycisków, krańcówek, czujników.
- Schemat podłączenia do wejść czujników zbliżeniowych (indukcyjnych)
- Schemat podłączenia impulsatora mechanicznego do kontrolera (24 imp/obr).
- Schemat podłączenia wyjścia indeks enkodera
- Listwa zaciskowa AnalogIN
- Konfiguracja połączenia sieciowego
- Aktualizacja FirmWare
- Wymiary płyty (mm)
Wyszukiwarka
Podobne podstrony:
FX1N HARDWARE MANUAL
PikoCNC HARDWARE manual
PANsound manual
als manual RZ5IUSXZX237ENPGWFIN Nieznany
hplj 5p 6p service manual vhnlwmi5rxab6ao6bivsrdhllvztpnnomgxi2ma vhnlwmi5rxab6ao6bivsrdhllvztpnnomg
Cutting Board 1
BSAVA Manual of Rabbit Surgery Dentistry and Imaging
Okidata Okipage 14e Parts Manual
Bmw 01 94 Business Mid Radio Owners Manual
Manual Acer TravelMate 2430 US EN
manual mechanika 2 2 id 279133 Nieznany
4 Steyr Operation and Maintenance Manual 8th edition Feb 08
Oberheim Prommer Service Manual
cas test platform user manual
Kyocera FS 1010 Parts Manual
juki DDL 5550 DDL 8500 DDL 8700 manual
Forex Online Manual For Successful Trading
więcej podobnych podstron