38
E l e k t r o n i k a d l a W s z y s t k i c h
Interfejs 3−wire
Uproszczony schemat blokowy scalonego
potencjometru cyfrowego z interfejsem 3−wire
pokazany jest na rysunku 4. Rysunek 5 poka−
zuje rozkład wyprowadzeń wersji DIL oraz
standardowej SMD typu SO−8 (uwaga − je−
szcze mniejsze wersje SMD w obudowach
TSSOP i MSOP mają odmienny układ wypro−
wadzeń). Końcówki VH, VL, VW odpowia−
dają wyprowadzeniom zwykłego potencjome−
tru. Oznaczenia H (high − górny) oraz L (low −
dolny) są umowne i dotyczą sposobu sterowa−
nia; nie są natomiast związane z biegunowo−
ścią napięć na tych końcówkach (co oznacza,
że końcówka VL może mieć potencjał wyższy
niż VH).
Dostępne obecnie potencjometry XDCP
z interfejsem 3−wire są zamykane w jednako−
wych 8−nóżkowych obudowach, mają iden−
tyczny układ wyprowadzeń i są zasilane po−
jedynczym napięciem dodatnim względem
masy, czyli końcówki 4. Jednak dzięki zasto−
sowaniu wewnętrznego podwajacza napięcia
przy takim pojedynczym zasilaniu dopu−
szczalny zakres napięć na końcówkach VH,
VL, VW jest znacznie szerszy − zazwyczaj
±5V. Szczegóły zawarte są w tabeli 2 (patrz
część 1).
Zasada pracy interfejsu 3−wire jest bardzo
prosta. Wejście INC (increment) jest wej−
ściem sygnału taktującego, zmieniającego
położenie suwaka. Każde opadające zbocze
na tym wejściu powoduje przesunięcie suwa−
ka „o jedną pozycję“. Kierunek przesuwania
jest wyznaczony przez stan logiczny na wej−
ściu U/D (up/down). Jak wskazuje oznacze−
nie, stan wysoki na wejściu U/D powoduje
przesuwanie w górę, czyli w stronę końców−
ki VH, stan niski − w dół, w kierunku VL.
Podobnie jak w zwykłym potencjometrze
obrotowym, po osiągnięciu jednej ze skraj−
nych pozycji, suwak pozostaje w niej (a nie
przeskakuje na przeciwległą skrajną), co jest
istotną zaletą.
Końcówka \CS (Chip Select) jest wej−
ściem zezwalającym. Stan niski umożliwia
pracę, to znaczy pozwala zmieniać stan po−
tencjometru. W obecności napięcia zasilają−
cego, gdy wejście \CS ma stan wysoki, układ
scalony jest w stanie spoczynku, w którym
pobór prądu jest radykalnie zmniejszony,
przy czym sam potencjometr może normal−
nie pracować, a suwak pozostaje w ostatnio
osiągniętym położeniu. Oznacza to, że układ
może być „budzony” tylko na czas regulacji,
a potem w czasie pracy stale pozostawać
w spoczynku.
Co bardzo ważne, rosnące zbocze na wej−
ściu \CS, podczas gdy na wejściu INC jest
stan wysoki, powoduje zapisanie „położenia
suwaka” do wewnętrznej, nieulotnej pamięci
EEPROM przed przejściem w stan spoczyn−
kowy. Rosnące zbocze na \CS i obecność sta−
nu niskiego na INC powoduje przejście do
stanu spoczynku bez zapisania ostatniego po−
łożenia suwaka − w pamięci pozostanie jakieś
zapisane tam wcześniej położenie suwaka.
Takie właściwości umożliwiają wybór
funkcji potrzebnej w danym zastosowaniu: al−
bo po włączeniu napięcia zasilającego układ
suwak zawsze znajduje się w tej samej pozy−
cji, albo przywracana jest ostatnia pozycja
sprzed wyłączenia napięcia.
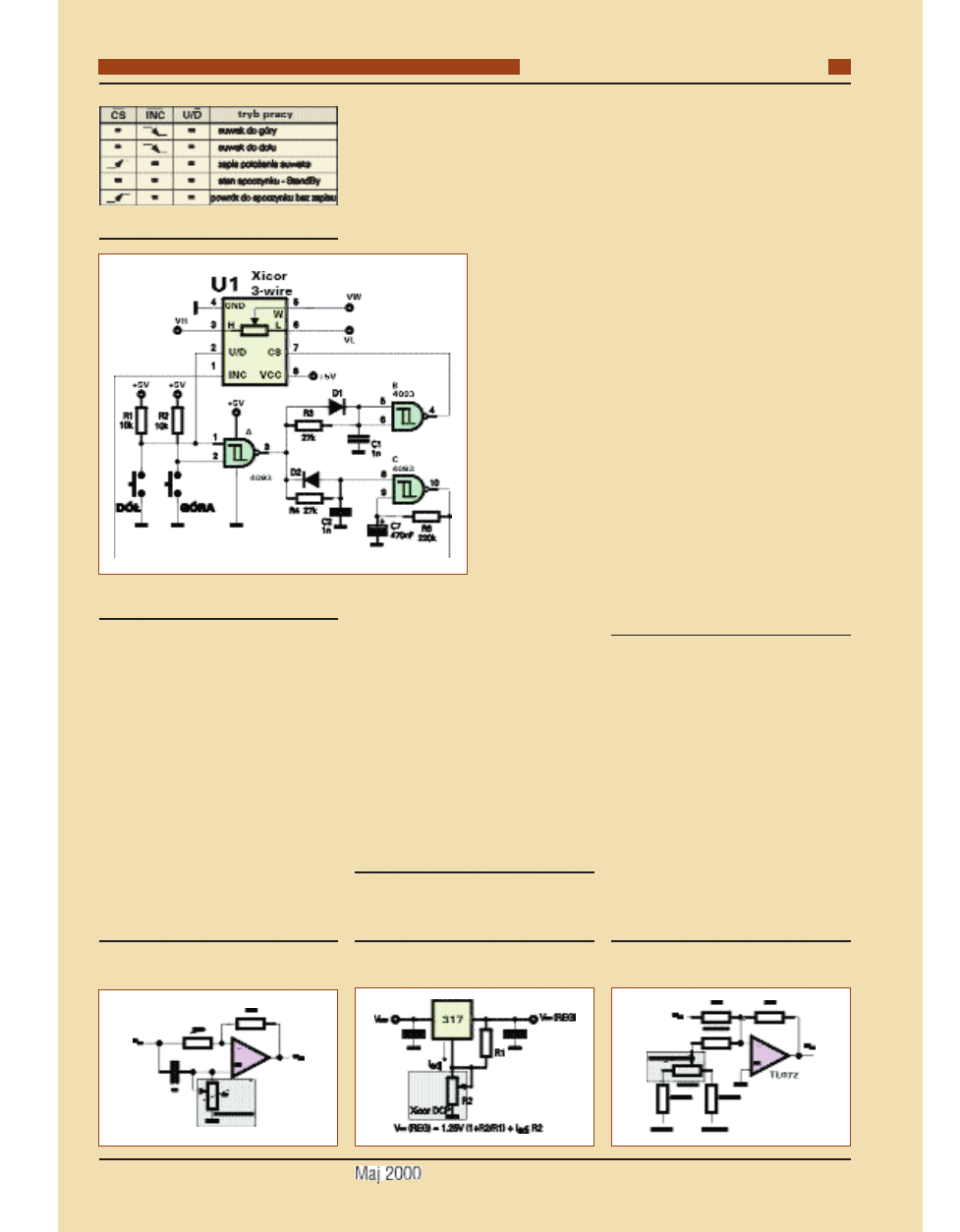
Właściwości wejść sterujących zebrane są
w tabeli 3. Choć podane właśnie zasady ste−
rowania mogą się wydać dość trudne,
w praktyce można wykorzystać prosty układ
do ręcznego sterowania, pokazany na rysun−
ku 6. Dodanie jednej popularnej kostki
CMOS 4093 i kilku elementów dyskretnych
pozwala sterować pracą układu za pomocą
dwóch przycisków (GÓRA, DÓŁ).
C
C
C
C
yy
yy
ff
ff
rr
rr
o
o
o
o
w
w
w
w
e
e
e
e
p
p
p
p
o
o
o
o
tt
tt
e
e
e
e
n
n
n
n
c
c
c
c
jj
jj
o
o
o
o
m
m
m
m
e
e
e
e
tt
tt
rr
rr
yy
yy
ff
ff
ii
ii
rr
rr
m
m
m
m
yy
yy
X
X
X
X
ii
ii
c
c
c
c
o
o
o
o
rr
rr
C
Cy
yffrro
ow
we
e p
po
otte
en
nc
cjjo
om
me
ettrry
y e
elle
ek
kttrro
on
niic
czzn
ne
e p
prro
od
du
uk
ko
ow
wa
an
ne
e s
są
ą o
ob
be
ec
cn
niie
e p
prrzze
ezz w
wiie
ellu
u w
wy
yttw
wó
órrc
có
ów
w.. N
Na
ajjb
ba
arrd
dzziie
ejj zzn
na
an
ne
e s
są
ą w
wy
yrro
ob
by
y ffiirrm
m D
Da
alllla
as
s ii X
Xiic
co
orr..
O
Os
so
ob
by
y,, k
kttó
órre
e p
po
o rra
azz p
piie
errw
ws
szzy
y m
ma
ajją
ą d
do
o c
czzy
yn
niie
en
niia
a zz o
offe
errttą
ą p
po
otte
en
nc
cjjo
om
me
ettrró
ów
w c
cy
yffrro
ow
wy
yc
ch
h ffiirrm
my
y X
Xiic
co
orr m
mo
og
gą
ą b
by
yć
ć p
prrzze
es
sttrra
as
szzo
on
ne
e zza
arró
ów
wn
no
o
m
mn
no
og
go
oś
śc
ciią
ą tty
yp
pó
ów
w,, jja
ak
k ii w
wy
ys
sttę
ęp
po
ow
wa
an
niie
em
m u
uk
kłła
ad
dó
ów
w,, k
kttó
órry
yc
ch
h ffu
un
nk
kc
cjje
e ii p
pa
arra
am
me
ettrry
y w
wy
yd
da
ajją
ą s
siię
ę jje
ed
dn
na
ak
ko
ow
we
e.. N
Niie
e ttrrzze
eb
ba
a s
siię
ę jje
ed
dn
na
ak
k n
niic
czze
eg
go
o b
ba
ać
ć
− w
wy
ys
sttę
ęp
pu
ujją
ąc
ca
a rró
óżżn
no
orro
od
dn
no
oś
ść
ć o
orra
azz w
wy
yc
co
offy
yw
wa
an
niie
e jje
ed
dn
ny
yc
ch
h,, a
a w
wp
prro
ow
wa
ad
dzza
an
niie
e iin
nn
ny
yc
ch
h tty
yp
pó
ów
w zzw
wiią
ązza
an
ne
e s
są
ą zz c
ciią
ąg
głły
ym
m p
po
os
sttę
ęp
pe
em
m..
W
W d
drru
ug
giim
m o
od
dc
ciin
nk
ku
u o
op
piis
sa
an
no
o s
szzc
czze
eg
gó
ółło
ow
wo
o iin
ntte
errffe
ejjs
s 3
3−w
wiirre
e ii p
po
od
da
an
no
o p
prrzzy
yk
kłła
ad
dy
y p
prra
ak
ktty
yc
czzn
ny
yc
ch
h zza
as
stto
os
so
ow
wa
ań
ń e
elle
ek
kttrro
on
niic
czzn
ny
yc
ch
h p
po
otte
en
nc
cjjo
om
me
ettrró
ów
w..
Najsłynniejsze
Najsłynniejsze
aplikacje
aplikacje
Rys. 4 Układ z interfejsem 3−wire
Rys. 5 Rozkład wyprowadzeń
Część 2
W stanie spoczynku, gdy żaden z przyci−
sków nie jest wciśnięty, na wejściach bramki
A występują stany wysokie, a na jej wyjściu
stan niski. Generator z bramką C nie pracuje.
Na wyjściu bramki B panuje stan wysoki.
Naciśnięcie któregokolwiek z przyci−
sków powoduje pojawienie się stanu wyso−
kiego na wyjściu bramki A. W pierwszej ko−
lejności przez diodę D1 szybko naładuje się
C1, bramka B zmieni stan i stan niski na
wejściu \CS (n.7) zezwoli na pracę kostki
U1. Po chwili wyznaczonej przez R4C2 zo−
stanie uruchomiony generator na bramce C.
Już pierwsze, krótkie naciśnięcie którego−
kolwiek przycisku spowoduje pojawienie
się ujemnego zbocza na wejściu INC (n. 1
U1) i skok suwaka o jedną pozycję. Gdy
przycisk będzie naciskany długo, pracujący
generator C będzie przesuwał suwak, aż ten
dojdzie do jednej z pozycji skrajnych i tam
się „zatrzyma”.
Po zwolnieniu przycisku, na wyjściu
bramki A pojawi się stan niski. Kondensa−
tor C2 szybko rozładuje się przez diodę
i unieruchomi generator C, wymuszając na
jego wyjściu i nóżce1 U1 stan wysoki. Po
krótkim czasie opóźnienia, wyznaczonym
przez R3C1, wyjście bramki powróci do
stanu wysokiego. Jak
podano wcześniej,
rosnące zbocze na
\CS w chwili, gdy
wejście INC jest
w stanie H powoduje
zapamiętanie położe−
nia suwaka w we−
wnętrznej, nieulotnej
pamięci EEPROM.
Oznacza to, że zapis
do pamięci wykony−
wany jest po każdym
naciśnięciu i zwol−
nieniu przycisku ste−
rującego.
Szybkość przesu−
wu suwaka przy cią−
głym naciskaniu moż−
na dobrać dowolnie,
zmieniając wartość
R5 w zakresie 10k...2,2M
Ω
.
Układ z rysunku 6 jest zalecany przez pro−
ducenta i nie powinien sprawić żadnych nie−
spodzianek. Oczywiście kostki z interfejsem
3−wire mogą też być sterowane przez mikro−
procesor. Wtedy linie INC oraz U/D będą
wspólne dla wielu kostek, natomiast koń−
cówki \CS umożliwią wybranie konkretnego
układu. Przy takim zastosowaniu, aby unik−
nąć niespodzianek, trzeba sprawdzić w kar−
cie katalogowej wymagania czasowe doty−
czące przebiegów sterujących. Warto rów−
nież zajrzeć do noty aplikacyjnej AN−92,
gdzie omówiono niebezpieczeństwo zmiany
stanu potencjometru tuż po włączeniu zasila−
nia, gdy wejście \CS nie jest w tym czasie
w stanie wysokim (nie jest podciągnięte re−
zystorem do plusa zasilania).
Wersje
Liczba dostępnych wersji podobnych ko−
stek z interfejsem 3−wire może przyprawić nie−
jednego Czytelnika o ból głowy. Jednak po
krótkiej analizie można bez trudu zrozumieć
różnice. Przede wszystkim należy pamiętać, że
wszystkie dostępne obecnie układy z tym inter−
fejsem mają identyczny rozkład wyprowadzeń.
Różnią się tylko ilością kroków regulacji (czyli
liczbą rezystorów), dopuszczalnymi zakresami
napięć zasilania i napięć na końcówkach poten−
cjometru oraz charakterystyką regulacji (linio−
wa / logarytmiczna). Starsze wersje wycofane
z oferty, obecne jeszcze na rynku, miały gorsze
niektóre parametry, na przykład pobierały wię−
cej prądu lub miały mniejszą liczbę rezystorów.
Na przykład układ X9314 nie jest już pro−
dukowany, bo został zastąpiony niemal iden−
tyczną kostką X9C303 o większej liczbie kro−
ków regulacji (100 zamiast 32) oraz innej re−
zystancji (30k
Ω
zamiast 10k
Ω
).
Starsza liniowa kostka X9313 (32 stop−
nie) jest wypierana przez nowsze 100−stop−
niowe rodziny X9CMME, czyli X9C102,
103, 104, 503 (odpowiednio 1k
Ω
, 10k
Ω
,
100k
Ω
, 50k
Ω
). Co istotne, liniowy układ
X9312 przy zasilaniu pojedynczym napię−
ciem +5V ma dopuszczany zakres napięć na
końcówkach potencjometru (n. 3, 5, 6) rów−
ny 0....+15V, a nie ±5V, jak wszystkie
wcześniej wymienione. Jest to bardzo po−
żyteczna właściwość w niektórych zastoso−
waniach; umożliwia na przykład sterowanie
analogowym
procesorem
dźwięku
(LM1036, TDA1524), zasilanym napię−
ciem 12V.
Kluczowe parametry
Generalnie wszystkie układy z interfej−
sem 3−wire mogą być zasilane napięciem
4,5...5,5V. Istnieją też wersje niskonapięcio−
we pracujące przy napięciach zasilania
2,7...5,5V. Mają one na końcu oznaczenia
dodatkowe oznaczenie 2.7, na przykład
X9317−2.7. Podstawowe parametry zebrane
są w tabeli 4.
Podany współczynnik temperaturowy re−
zystancji, istotny przy zastosowaniach
2−końcówkowych (w roli rezystora regulo−
wanego wg rysunku 8) jest bardzo niekorzy−
stny − może wynosić ±300 a nawet
±600ppm/
o
C. Jednak przy zastosowaniach
3−końcówkowych (w roli potencjometru
dzielącego napięcie wg rysunku 9) stabilność
jest bardzo dobra i wynosi ±20ppm/
o
C.
39
Najsłynniejsze aplikacje
E l e k t r o n i k a d l a W s z y s t k i c h
Tab. 3
Rys. 6 Zalecany układ ręcznego stero−
wania
Rys. 7 Przesuwnik fazy
Rys. 8 Przerzutnik Schmitta o zmien−
nej histerezie
Rys. 9 Układ polaryzacji
(zerowania)
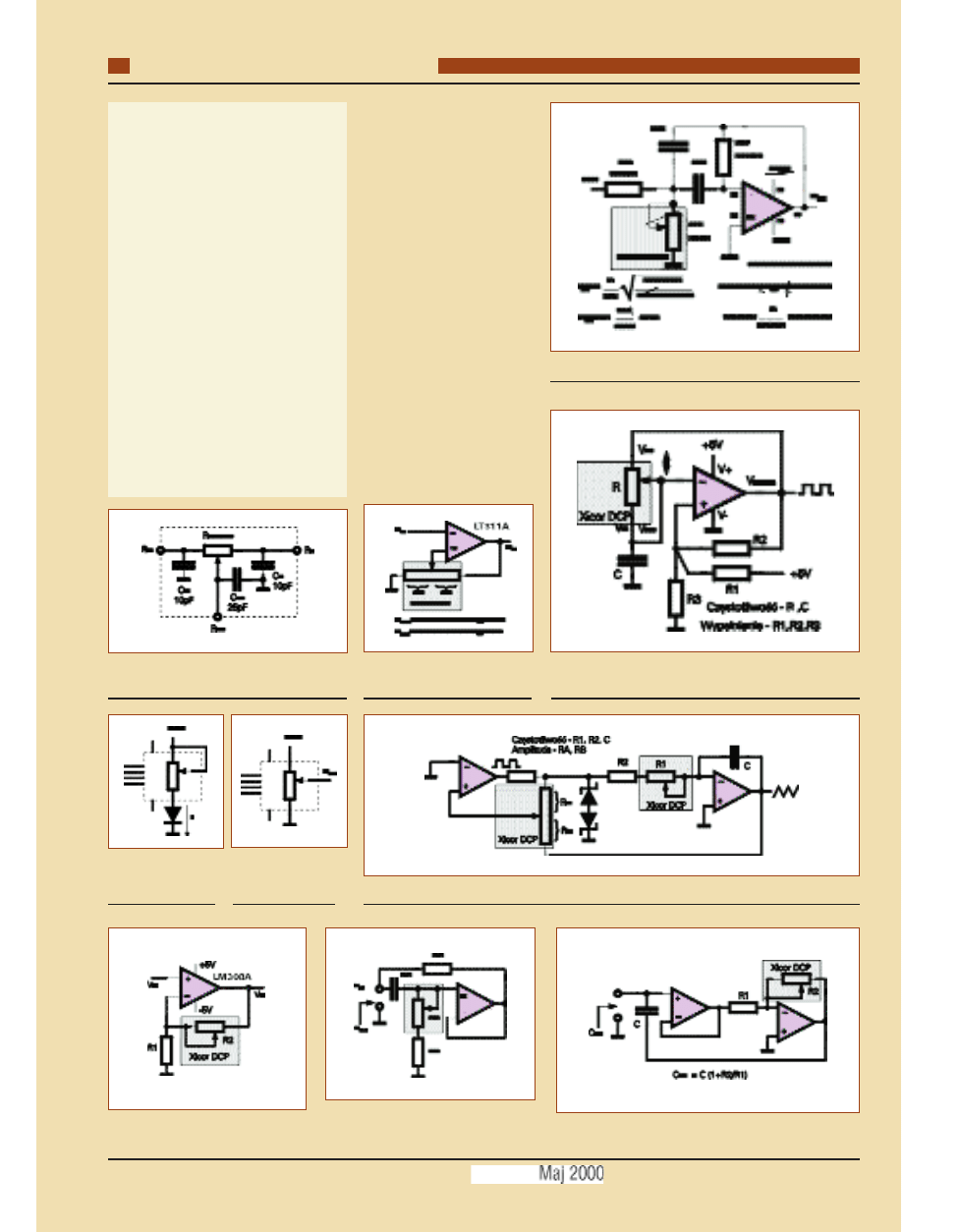
Przykłady wyko−
rzystania
Niektóre przykłady zastoso−
wania potencjometrów elektro−
nicznych (z dowolnym interfej−
sem) pokazane są na rysunkach
10...19. Pochodzą one głównie
z not aplikacyjnych AN−115,
AN124 i AN−133. Wszystkie te
przykłady wskazują, że zakres
zastosowań potencjometrów cy−
frowych jest wręcz nieograni−
czony. Projektując własne ukła−
dy trzeba jednak zwracać uwagę
na dopuszczalny zakres napięć
na końcówkach potencjometru.
W nocie aplikacyjnej AN−51
można znaleźć schemat i opis
układu cyfrowej regulacji z po−
mocą mikroprocesora głośności,
balansu i barwy dźwięku z analo−
gowym procesorem LM1036
i jedną poczwórną kostką X9241,
sterowaną przez szynę I2C.
(red)
40
Najsłynniejsze aplikacje
E l e k t r o n i k a d l a W s z y s t k i c h
Zalecany zakres temperatur pracy:
0...+70
o
C
Dopuszczalny zakres temperatur pracy: −
65...+135
o
C
Prąd zasilania w stanie aktywnym: typ.
1mA max 3mA
Prąd zasilania w spoczynku: typ. 0,2mA
max 0,5mA
Moc wydzielana we wszystkich rezysto−
rach potencjometru: do 10mW
Maksymalny prąd suwaka (wyprowadze−
nia VW): 1mA
Rezystancja suwaka (kluczy CMOS):
typ 40
Ω
, max 100
Ω
Pojemności potencjometru (rysunek 7):
10...25pF
Tolerancja rezystancji: ±20%
Współczynnik temperaturowy rezystancji
±300...±600ppm/
o
C
Szumy potencjometry: −120dBV
Trwałość pamięci EEPROM: min 100000
cykli zapisu
Trwałość danych w pamięci: 100 lat
Rys. 10 Szkodliwe pojemności
wewnętrzne
Rys. 11 Tryb −
zmienny
rezystor
Rys. 12 Tryb −
potencjometr
Rys. 13 Wzmacniacz
nieodwracający
Rys. 14 Regulowany zasilacz
Rys. 17 Filtr pasmowy strojony
Rys. 18 Generator (2)
Rys. 16 Indukcyjność
Rys. 19 Mnożnik pojemności
Rys. 15 Generator (1)
Wyszukiwarka
Podobne podstrony:
Cyfrowe potencjometry Xicor 1
Cyfrowe potencjometry firmy Xicor
Cyfrow potencjometr audio
Potencjometry cyfrowe AD5233 pr Nieznany
Miniaturowy wzmacniacz audio z potencometrem cyfrowym
1999 03 Potencjometr cyfrowy
Miniaturowy wzmacniacz audio z potencometrem cyfrowym
Potencjometr cyfrowy
NOTAKI Z TECHNIKI CYFROWEJ
06 Kwestia potencjalności Aid 6191 ppt
Wykład XI Metody opisu układów cyfrowych
potencjal spoczynkowy i jego pochodzenie
Cyfrowy system rejestracji obrazu
Ortofotomapa cyfrowa i Numeryczny Model Terenu
Dźwięk cyfrowy plik cyfrowy
Potencjał czynnościowy mięśniowej komórki roboczej serca1
Przebieg potencjału czynnościowego i kierunki prądów jonowyc
CYFROWA PRZYSZŁOŚĆ
więcej podobnych podstron