Opisywany układ służy do wskazywania licz-
by obrotów silnika spalinowego z zapłonem
iskrowym w nowszych i starszych motocy-
klach, ale nie tylko w motocyklach. Obroty
wyświetlane są w postaci cyfrowej oraz
linijki-bargrafu. Wyświetlane jest również
napięcie akumulatora, dzięki czemu możliwe
jest sterowanie przednią lampą i utrzymanie
optymalnego napięcia ładowania (w przy-
padku motocykli z mało wydajną prądnicą).
Układ ma też możliwość generowania błys-
ków lampy.
Opis układu
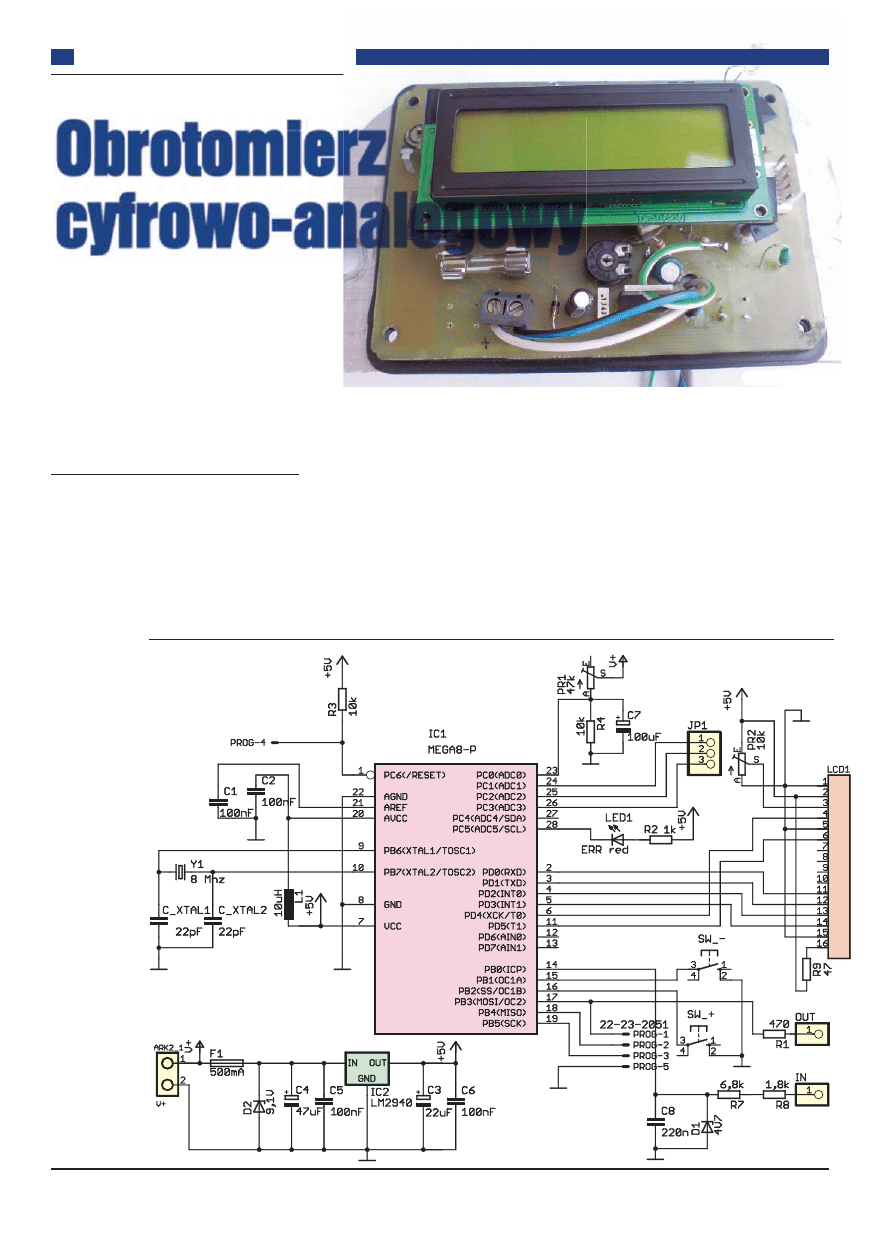
Schemat ideowy pokazany jest na rysunku 1.
Sercem układu jest mikrokontroler ATmega8,
wykonujący polecenia programu napisanego
w języku C – program można ściągnąć z
Elportalu. Dane wyświetlane są na tekstowym
wyświetlaczu LCD pracującym w trybie 4-
bitowym, co ogranicza nam liczbę niezbęd-
nych połączeń. Do końcówki 17 mikrokontro-
lera podłączony
jest tranzystor
MOSFET ste-
rujący przed-
nią lampą. Jest
to tranzystor o
bardzo niskim
napięciu pro-
gowym miesz-
czącym się w
granicach 1–2V,
czyli jest moż-
liwe pełne jego
otwarcie już
przy napięciu
5V, jakim dys-
ponujemy na
k o ń c ó w k a c h
mikrokontrole-
ra. Układ ma
dwa przyciski
i jedną diodę
LED. Jeden
z przycisków
służy do włącza-
nia lub wyłącza-
nia sterowania
przednią lampą.
Po wciśnięciu
drugiego przy-
cisku lampa
zaczyna pulso-
wać niczym lampy w radiowozach z USA
podczas pościgu. Dioda LED sygnalizuje
przekroczenie maksymalnych obrotów i bez-
piecznego napięcia ładowania.
Pomiar napięcia zrealizowany jest na prze-
tworniku analogowo-cyfrowym wbudowa-
nym w ATmegę. Mierzone napięcie przecho-
dzi przez dzielnik rezystancyjny, w którym
dzielone jest przez około 3, ponieważ zakres
przetwarzania przetwornika wynosi 0–2,56V
a napięcie mierzone waha się w granicach
6–7,2V. Do wyjścia dzielnika podłączony jest
kondensator 100μF w celu ustabilizowania
napięcia mierzonego.
Impulsy wejściowe brane są z cewki zapło-
nowej od strony przerywacza. Przechodzą
przez stabilizator z diodą Zenera w celu wyeli-
minowania przepięć. Kondensator równoległy
z diodą Zenera, wraz z rezystorami wejściowy-
mi R7 i R8, tworzy układ czasowy eliminujący
drgania styków mechanicznego przerywacza.
Niestety ogranicza to maksymalną wartość
mierzonych obrotów ponieważ jak wiadomo,
równoległy kondensator jest prostym filtrem
dolnoprzepustowym i tłumi górne częstotliwo-
ści. Dlatego dla podanych parametrów, powy-
żej 8000RPM, układ nie działa, bo impulsy
wejściowe zostają odfiltrowane.
58
E l e k t r o n i k a d l a Ws z y s t k i c h
Czerwiec 2010
Czerwiec 2010
Forum Czytelników
Obrotomierz
Obrotomierz
cyfrowo-analogowy
cyfrowo-analogowy
Rys. 1
59
Program
Pomiar obrotów realizowany jest z wykorzy-
staniem licznika TIMER1. Mierzy on okres
sygnału wejściowego. Pracuje w trybie
Input
Capture, czyli zawartość licznika zrzucana
jest do rejestru ICR1 w momencie wykry-
cia aktywnego zbocza na końcówce 14 ICP.
Wtedy wywoływane jest przerwanie (listing
1), w którym sprawdzana jest wartość rejestru
ICR1 i jeśli jest ona większa niż 930, jest
przetwarzana, a TCNT1 jest zerowany. Jest to
zabezpieczenie przed zakłóceniami, bo zakła-
damy, że silnik nie przekroczy 8000RPM,
co odpowiada stanowi licznika 930. Wyższe
obroty to mniejszy okres a więc mniejsza
wartość licznika.
Przerwanie od TIMERA0 wyznacza
momenty aktualizacji danych na wyświetla-
czu i wyzwalania przetwornika AC.
Funkcję
main otwierają definicje zmien-
nych lokalnych, w tym definicja tablicy ze
znakami specjalnymi dla LCD do wyświetle-
nia linijki-bargrafu. Znaki mają postać słup-
ków o różnej wysokości. Następnie sprawdza-
na jest wartość napięcia zasilania (ładowania).
Jeśli jest ono niższe niż 6,4V, to rejestr
OCR2 jest dekrementowany i lampa przyga-
sa. Obciążenie maleje, dzięki czemu napięcie
ładowania wzrasta. Jeśli napięcie jest wyższe,
rejestr jest inkrementowany. Rejestr OCR2
służy zmianie wypełnienia przebiegu prosto-
kątnego PWM generowanego na końcówce
17 OC2. Zastosowano dodatkową zmienną
w celu spowolnienia zmian rejestru OCR2 i
uniknięcia efektu „szalonego światła”. Gdyby
od razu po wykryciu zmiany napięcia zmie-
niać rejestr OCR2, światło gasłoby lub zapa-
lało się momentalnie. Obecność dodatkowej
zmiennej sprawia, że musi ona osiągnąć war-
tość 1000, aby można było zwiększyć OCR2
o 1. Regulacja taka jest potrzebna, dlatego że
motocykle MZ TS 250 mają słabą 6-woltową
prądnicę. Przy niskich obrotach i włączonych
światłach napięcie ładowania bardzo spada,
co może spowodować zgaśnięcie silnika.
Stan przycisków badany jest w funkcji
main. Jeden z nich pozwala wyłączyć genero-
wanie PWM dla lampy i ustawić stan wysoki
na wyjściu, aby lampa świeciła maksymalną
mocą. Drugi ustawia naprzemiennie 0 i 1, co
daje efekt błyskania lampy.
Montaż i uruchomienie
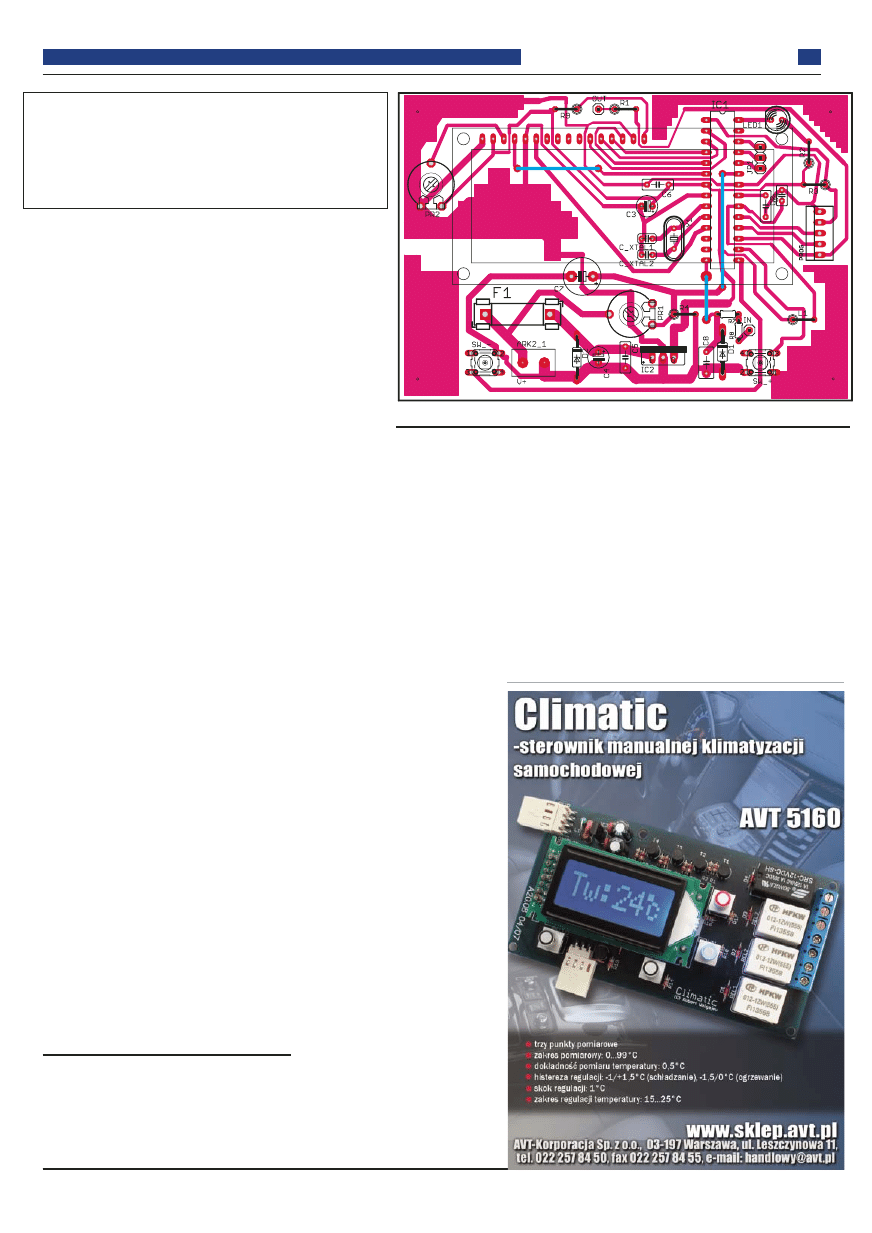
Schemat montażowy przedstawiony jest na
rysunku 2. Montaż przebiega klasycznie.
Na początek montujemy trzy zwory. Do
punktu IN podłączamy cewkę zapłonową od
strony prze-
rywacza. Do
punktu OUT
p o d ł ą c z a -
my bramkę
t r a n z y s t o r a
M O S F E T ,
którego dren
p o d ł ą c z a m y
pod przed-
nią żarówkę,
a źródło
do masy.
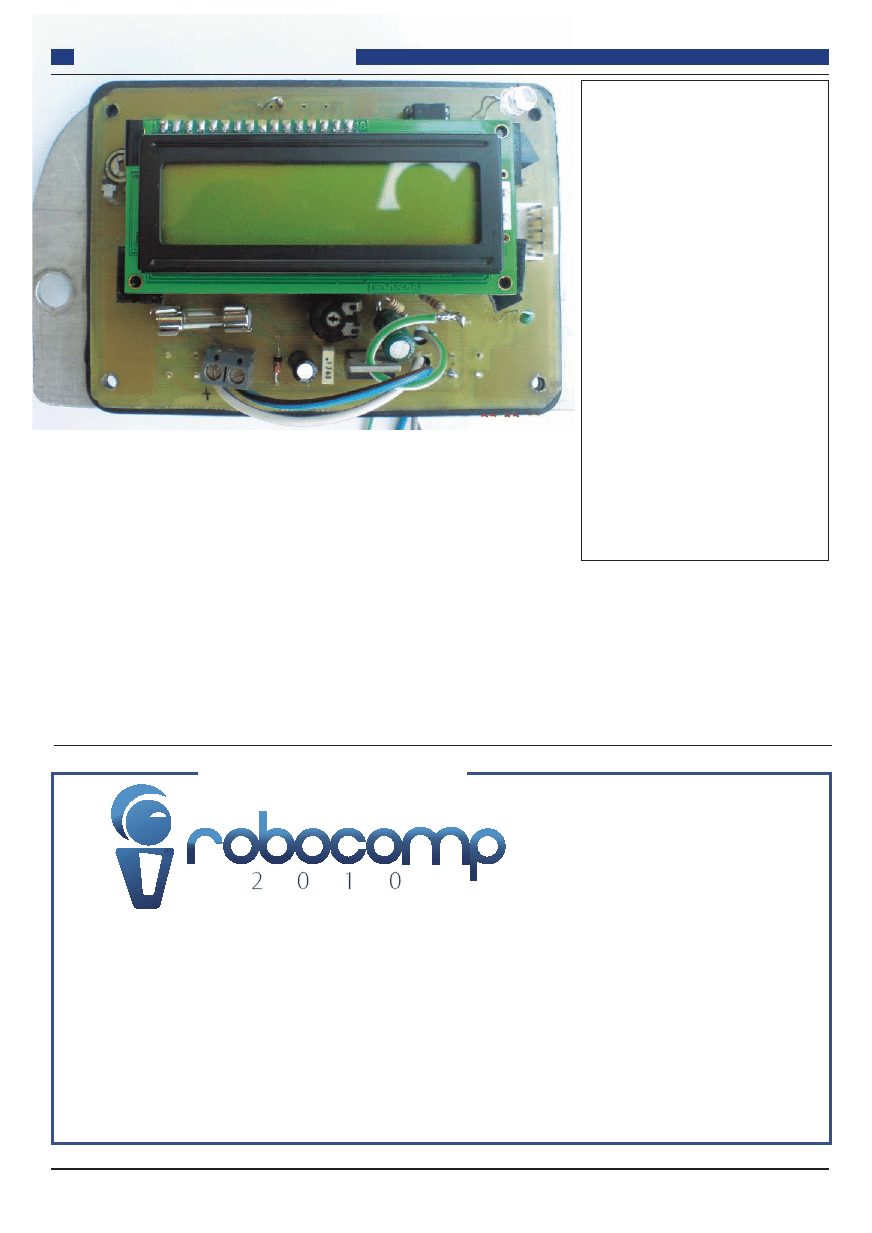
Wyświetlacz montujemy w podstawce, a
w jego rogach przykręcamy śruby dystan-
sujące. Ustawiamy w ten sposób położenie
wyświetlacza, aby lekko dotykał obudowy.
Przewody zasilające lutujemy do płytki lub
montujemy do złącza śrubowego ARK2_1.
Następnie wpinamy je jak najbliżej aku-
mulatora w celu uniknięcia spadku napięć
na przewodach prowadzących duże prądy.
Zaniżyłoby to wyniki pomiarów napięcia
ładowania. W takiej konfiguracji koniecz-
ne jest przecięcie zasilania tranzystorem
bipolarnym średniej mocy np. BD135, aby
umożliwić włączanie i wyłącza-
nie układu. Wpięcie zasilania
układu na dodatni zacisk cewki
zapłonowej niweluje konieczność
montażu dodatkowego tranzysto-
ra, ale wprowadza błędy w pomia-
rze napięcia.
Na koniec ustawiamy mierzone
napięcie. Kręcimy potencjometrem
PR1 aż do zrównania wskazań z
multimetrem. Potencjometrem PR2
ustawiamy kontrast wyświetlacza.
Jedynym problemem może być
wycięcie w obudowie prostokątne-
go otworu dla wyświetlacza LCD
oraz montaż obudowy do motocy-
kla. W prototypie w miejscu otwo-
ru na wyświetlacz przykleiłem od
środka silikonem bezbarwną folię.
Dolną część obudowy przykręci-
łem do grubej blachy aluminiowej,
a ją z kolei do kierownicy.
Jeśli ktoś dysponuje własnym
programatorem, złącza PROG nie
musi lutować. Osobom, które jed-
nak chcą mieć możliwość prze-
programowania w systemie, poda-
ję oznaczenia pinów: 1. MISO;
2. MOSI; 3. SCK; 4. RST; 5.
GND. Złącza JP1 nie montujemy
w ogóle.
Możliwość zmian
Przerobienie woltomierza na 12V: wymiana
diody Zenera D2 na diodę o większym napię-
ciu Zenera niż 14,4V lub jej usunięcie. Można
również zastosować popularny i tańszy stabi-
lizator napięcia 7805. Zdecydowałem się na
LM2940 tylko dlatego, iż jest to stabilizator
o niskim spadku napięcia, dzięki czemu na
wyjściu zawsze jest pewne 5V, nawet gdy
napięcie ładowania mocno przysiada. Z tego
samego powodu w układzie pracuje wersja
o niskim minimalnym napięciu zasilania,
ATmega8-L. W obwodzie pomiaru napięcia
Rys. 2
ISR(TIMER1_CAPT_vect)
{
if(ICR1>930)
//zabezpieczenie
przed drganiem stykow przerywacza
{
TCNT1=0;
rpm=ICR1;
rpm=(7500000/rpm); //przeliczenie
obrotow
}
}
59
E l e k t r o n i k a d l a Ws z y s t k i c h
Czerwiec 2010
Czerwiec 2010
Forum Czytelników
Listing 1
R
E
K
L
A
M
A
należy zwiększyć podział dzielnika do 6.
Można to zrobić przez wymianę PR1 na
100kΩ i odpowiednią regulację oraz odremo-
wanie linijki 87 programu i zamianę kolej-
ności linijek 91 i 92. Układ kształtowania
impulsów wejściowych nie był testowany
przy napięciu 12V, choć nie powinno to
wpłynąć na jego działanie. Jeśli układ będzie
zawyżał obroty, będzie to oznaką, że mikro-
kontroler wykrywa drgania styków przerywa-
cza. Należy wtedy zwiększyć stałą czasową
C8*(R8+R7). Teoretycznie pozwala on na
pomiar obrotów do 8000RPM. W przypadku
konieczności zwiększenia tej wartości należy
zmodyfikować linijkę 49 programu i wpisać
mniejszą wartość niż 930. Do obliczenia
tej wartości korzystamy ze wzoru stała =
(7500000/maksymalne_obroty). Następnie
zmniejszamy stałą czasową obwodu wejścio-
wego, aby przenosił on wyższe częstotliwości.
Jednak wiąże się to z ryzykiem przeniesienia
drgań styków na wejście mikrokontrolera.
Ryzyka tego pozbawieni są jedynie posiada-
cze zapłonów elektronicznych, z prostej przy-
czyny, nie ma tam co drgać, gdyż elementem
wykonawczym jest tranzystor. Tylko w teorii
drgania są eliminowane programowo, a jak
wiadomo, praktyka z teorią nie mają dużo
wspólnego i przy obrotach mniejszych niż
0,9 drgania nie będą eliminowane przez pro-
gram. Można spróbować usunąć wyrażenie
” |(1<<ICES1) z 216 linijki programu, aby
przełączyć na wyzwalanie zboczem opada-
jącym. Powinno to pomóc w wykrywaniu i
eliminowaniu drgań styków, bo właśnie przy
opadającym zboczu generowane są drgania.
Gdy przeniosą się na wejście, mikrokontro-
ler zmierzy bardzo krótki okres, co pozwoli
mu zgodnie z listingiem 1 na jednoznaczne
stwierdzenie wystąpienia fałszywego zbocza.
W przypadku pytań i niejasności proszę
pisać na podane adresy mailowe.
Paweł Domagalski
domagalski250@gmail.com
paweldom@p.lodz.pl
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470
Ω
R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1k
Ω
R3,R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10k
Ω
R7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6,8k
Ω
R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1,8k
Ω
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Ω
PR1 . . . . . . . . . . . . . . . . . . . . . . . . . 47k
Ω lub 100kΩ
PR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10k
Ω
Kondensatory
C1,C2,C5,C6 . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
μF/16V
C4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
μF/16V
C7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
μF/6,3V
C8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220nF
C_XTAL1,CXTAL2 . . . . . . . . . . . . . . . . . . . . . . . 22pF
Półprzewodniki
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4V7
D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9V1 lub >15V
IC1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .ATmega8-L
IC2 . . . . . . . . . . . . . . . . . . . . . . . . LM2940 lub 7805
LCD1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16*2
LED1 . . . . . . . . . . . . . . . . . . . . . .czerwona superjasna
Pozostałe
F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 500mA
L1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
μH
Y1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8MHz
Switche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 szt.
Wykaz elementów
60
E l e k t r o n i k a d l a Ws z y s t k i c h
Czerwiec 2010
Czerwiec 2010
Forum Czytelników
Festiwal Robotyki ROBOCOMP 2010
to nowa inicjatywa Koła Naukowego Integra
działającego przy Katedrze Automatyki AGH.
Pomysł wzbudził duże zainteresowanie władz
uczelni i studentów, owocując planowanym z
rozmachem przedsięwzięciem. Główną atrak-
cją będą zawody robotów, wzorowane na
podobnych imprezach, organizowanych w
ośrodkach akademickich w całej Europie.
Ponadto planujemy urozmaicić ten dzień
pokazami profesjonalnych konstrukcji robo-
tów, prezentacjami firm i organizacji związa-
nych z robotyką, elektroniką i automatyką.
Impreza odbędzie się dn. 5.06.2010 r. na
terenie Akademii Górniczo-Hutniczej w
Krakowie. Zasadnicza część festiwalu odbę-
dzie się w Gmachu Głównym AGH (A0), a
finały zawodów robotów w pawilonie U2.
Kluczową częścią Festiwalu Robotyki
ROBOCOMP 2010 będą zawody robotów.
Planujemy ich rozegranie w następujących
kategoriach:
• Sumo, mini sumo, mikro sumo – autono-
miczne roboty mobilne, o ściśle określo-
nych rozmiarach i wadze, walczą w celu
wypchnięcia przeciwnika z ringu.
• Linefollower (czyli F1 dla robotów) –
pasjonujące wyścigi robotów podążają-
cych za czarną linią. Zadanie wydaje się
proste – nie zgubić linii, jednak o zwycię-
stwie decydują setne części sekund.
• Micromouse (mysz w labiryncie) – to kon-
kurencja, w której robot – ‘mysz’ – ma za
zadanie w jak najkrótszym czasie znaleźć
drogę przez labirynt.
• Freestyle (kategoria bez ograniczeń) –
jedynym kryterium oceny jest zaintereso-
wanie i opinia publiczności. To właśnie
widzowie za pomocą sms-ów zdecydują,
która konstrukcja jest najlepsza.
Miejsce walk robotów (Gmach Główny
AGH) sprawi, że wydarzenie to pozostanie
na długo w pamięci uczestników.
Więcej informacji dotyczących organiza-
cji festiwalu, regulaminu, warunków uczest-
nictwa znajduje się na stronie internetowej
festiwalu:
www.robocomp.info
.
5 czerwca 2010, Kraków AGH
Festiwal Robotyki
Wyszukiwarka
Podobne podstrony:
Elektroniczne układy analogowe i cyfrowe, Filtr aktywny dolnoprzepustowy
Cw 5 Pomiar napiecia i pradu stalego przyrzadami analogowymi i cyfrowymi
Pomiary prądu stałego przyrządami analogowymi i cyfrowymi
Sprawozdania przerobione, Pomiar prądu stałego przyrządami analogowymi i cyfrowymi 1, ZESPÓŁ SZKÓŁ I
Pomiar napiecia stalego przyrzadami analogowymi i cyfrowymi
Miernictwo- Przetwornik analogowo-cyfrowy kompensacyjny, 15 grudnia, 1995
Elektroniczne układy analogowe i cyfrowe, Multiplekser, Politechnika Lubelska w Lublinie
Elektroniczne układy analogowe i cyfrowe, Licznik z dwoma przeskokami na przerzutniku JK, POLITECHNI
Elektroniczne układy analogowe i cyfrowe, Multiplekser, Politechnika Lubelska w Lublinie
Elektroniczne układy analogowe i cyfrowe, Licznik z dwoma przeskokami na przerzutniku JK, POLITECHNI
Analizowanie działania układów analogowych i cyfrowych u
Bledy wskazan przyrzadow analogowych i cyfrowych
Karta analogowo cyfrowa
egzamin z forum, Mechatronika PP, Elektronika analogowa i cyfrowa
Formatka na laboratoria z Elekroniki analogowej i cyfrowej, Politechnika Poznańska, Mechatronika, Se
Przetwornik analogowo cyfrowy typu sigma delta
Sprawozdania przerobione, Pomiar napięcia stałego przyrządami analogowymi i cyfrowymi 1, 27
4.1.6 Sygnały analogowe i cyfrowe w dziedzinie czasu i częstotliwości, 4.1 Wprowadzenie do testowani
15 sygnał analogowy i cyfrowy
więcej podobnych podstron