1
Politechnika Wrocławska
W y d z i a ł M e c h a n i c z n y
W y d z i a ł M e c h a n i c z n y
Instytut Technologii Maszyn i Automatyzacji
Kierunek studiów:
Mechatronika
Mechatronika
Studia I-stopnia, rok I, sem. 2, rok akad. 2010/11
Materiały do wykładu „
Wst
ę
p do
Wst
ę
p do
mechatroniki
mechatroniki”
Dr in
ż
. Zbigniew Smalec (p. 3.19 B-4)
Cz
ęść
1 (1 – 108)
Wrocław, 2011
Mecha
nika + Elek
tron
ika + Informat
yka
=
Mechatronik
Mechatronik
a
a
Mechatroni
Mechatroni
ka
ka
Informatyka
Mikroelektronika
Elektromechanika
Mechanika
Układy elektryczne
Informatyka elektroniczna
Elektronika mocy
Układy adaptacyjne
Teoria stanów
Systemy o wi
ę
kszej zło
ż
ono
ś
ci
Oprogramowanie steruj
ą
ce
Oprogramowanie projektowe
Teoria systemów
i teoria sterowania
Mechatronika - podstawy
2
Pocz
ą
tki mechatroniki:
poj
ę
cie (termin) mechatronika zostało po raz pierwszy u
ż
yte w 1969 r. przez
Tatsuro Mori z japo
ń
skiej firmy Yaskava Electric Cooperation,
od 1971 r. poj
ę
cie „mechatronika” było chronione przez t
ą
firm
ę
jako nazwa
handlowa (wtedy pierwotnie rozumiano pod tym uzupełnienie składników
mechanicznych przez układy elektroniczne w takim sprz
ę
cie jak np. aparaty
fotograficzne z lustrzank
ą
),
od1982 r. poj
ę
cie mechatronika jest do swobodnego u
ż
ytku.
Definicja poj
ę
cia mechatroniki
Definicje mechatroniki
Układ (system) mechatroniczny stanowi wyrób ko
ń
cowy procesu optymalizacji, który
musi uwzgl
ę
dnia
ć
ograniczenia ekonomiczne, mechaniczne, wytwórcze, elektryczne,
elektroniczne i informatyczne (H. J. Herpel, 1996).
Mechatronika jest synergiczn
ą
kombinacj
ą
in
ż
ynierii mechanicznej, in
ż
ynierii
elektrycznej i technologii informatycznej w zintegrowanym projektowaniu
zaawansowanych (inteligentnych) układów technicznych w zespołach i maszynach
(IFToMM, 1995).
Jako system mechatroniczny okre
ś
lany jest funkcjonalny i przestrzennie
zintegrowany układ mechaniczno-elektryczny, w którym czujniki (sensory) przyjmuj
ą
informacje, układy mikroprocesorowe przetwarzaj
ą
te informacje, a elementy
wykonawcze (aktuatory) w celowy sposób wytwarzaj
ą
siły lub ruchy, które oddziałuj
ą
na system lub jego otoczenie.
Definicja poj
ę
cia mechatroniki
Mecha
Mecha
Mecha
Mecha
nika
nika
nika
nika
Elek
Elek
Elek
Elek
tron
tron
tron
tron
ika
ika
ika
ika
Informat
Informat
Informat
Informat
yka
yka
yka
yka
Mecha tron ika
Jest to interdyscyplinarny
obszar, w którym
współpracuj
ą
ze sob
ą
nast
ę
puj
ą
ce dyscypliny:
•
•
układy mechaniczne
układy mechaniczne
(budowa maszyn,
mechanika precyzyjna,
budowa aparatury),
•
•
układy elektroniczne
układy elektroniczne
(mikroelektronika,
elektronika mocy, technika
pomiarowa, aktuatoryka),
•
•
informatyka
informatyka (teoria
systemów, automatyzacja,
in
ż
ynieria
oprogramowania, sztuczna
inteligencja).
3
Mechatronika - wst
ę
p
Mechatronika to nauka istniej
ą
ca na styku pi
ę
ciu innych dziedzin wiedzy: mechaniki,
elektroniki, informatyki, automatyki i robotyki.
Przedmiotem zainteresowa
ń
i zastosowa
ń
mechatroniki s
ą
mi
ę
dzy innymi:
• roboty przemysłowe,
• układy sterowania pojazdami,
• nowoczesne zabawki,
• zaawansowany sprz
ę
t gospodarstwa domowego,
• urz
ą
dzenia automatyki i robotyki,
• obrabiarki sterowane numerycznie CNC (ang. Computerized Numerical Control),
• aparatura medyczna,
• technologie mikrosystemów MEMS (ang. Micro-electro-mechanical System) i
MOEMS (ang. Micro-optical-electro-mechanical System),
• obszary pomiarów w zakresie nano,
• mikrotechnologia,
• optyka,
• informatyka.
Typowy diagram mechatroniki
Sterowanie
Oprogramowanie
Mechanika
Elektronika
Sterowanie cyfrowe
Układy
sterowania
Elektromechanika
CAD/CAM
Czujniki
Modelowanie
systemów
Symulacja
Mikrosterowniki
MECHATRONIKA
MECHATRONIKA
Mechatronika jest synergi
ą
ró
ż
nych dziedzin.
4
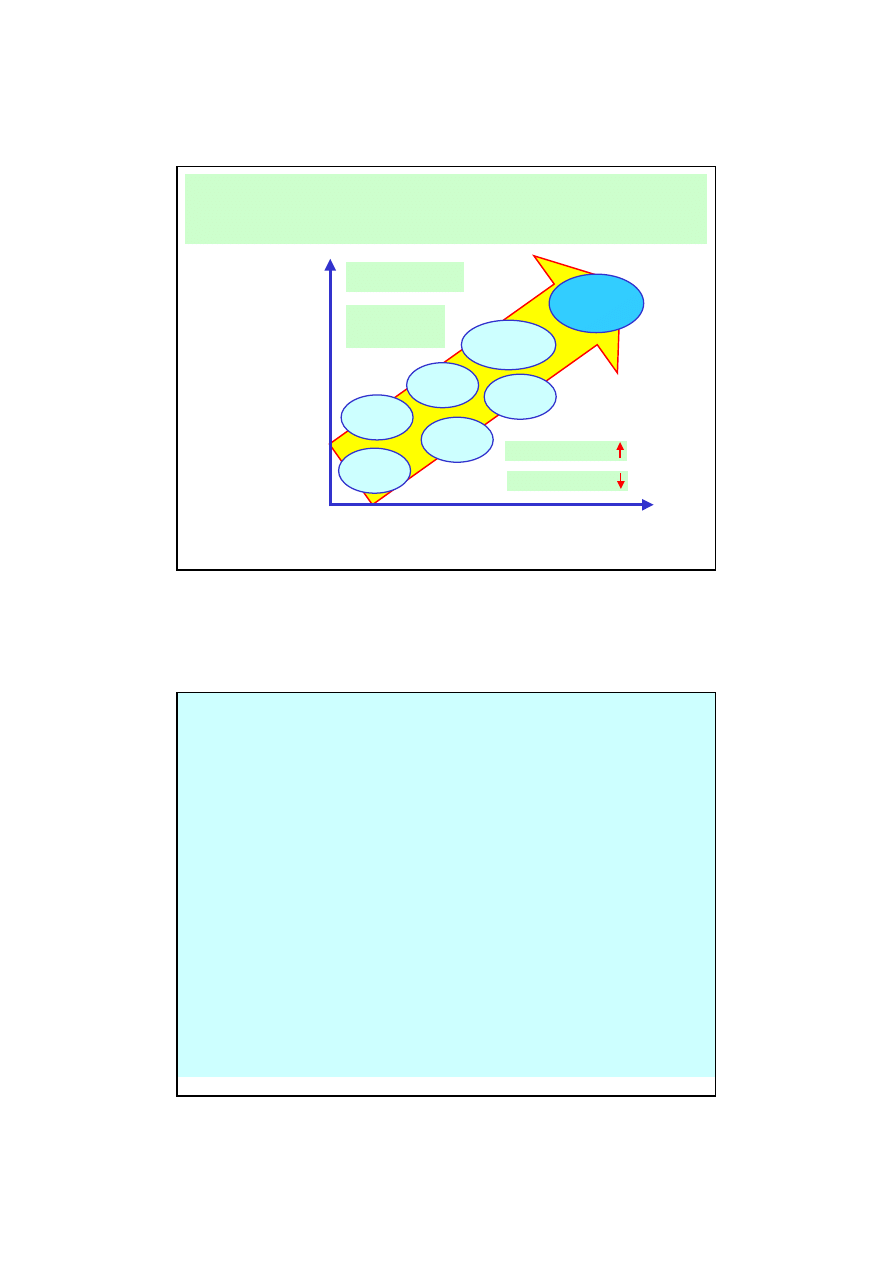
Historyczny rozwój mechatroniki na
przykładzie samochodów
1970
1980
1990
2000
Mechanika
Mechanika
Elektronika
Mechanika
Elektronika
Informatyka
Informatyka
Elektronika
Mechanika
Mechatronika
Rok
Mikroelektronika
Elektronika mocy
Nap
ę
dy elektryczne
Układy
elektromechaniczne
Systemy
mikromechaniczne
Roboty
Technika pomiarowa
Aktuatoryka
Technika systemów
Przetwarzanie
sygnałów
Technika regulacji
i automatyzacja
Techniki
komputerowe
Sztuczna
inteligencja
Informatyka
stosowana
Pojazdy
Silniki spalinowe
Turbiny
Samoloty
Mechanika techniczna
Dynamika maszyn
Mechanika płynów
Wspomaganie komputerowe
projektowania
MECHATRONIKA
ELEKTRO-
TECHNIKA
INFORMA-
TYKA
BUDOWA
MASZYN
Mechatronika
5
Regulator Watta do maszyny parowej jest przykładem urz
ą
dzenia, w którym funkcje ustawiania warto
ś
ci zadanej,
pomiaru wielko
ś
ci regulowanej i porównania jej z warto
ś
ci
ą
zadan
ą
(przetwarzanie informacji) oraz sterowanie s
ą
realizowane w cało
ś
ci na drodze mechanicznej. Urz
ą
dzenia mechaniczne, które maj
ą
znaczn
ą
ilo
ść
cz
ęś
ci
ruchomych s
ą
kosztowne i kłopotliwe w eksploatacji, a wzrost liczby cz
ęś
ci mechanicznych pogarsza ich
niezawodno
ść
. Alternatyw
ą
dla takich urz
ą
dze
ń
s
ą
systemy mechatroniczne, w których przetwarzanie informacji
i sterowanie jest realizowane przez układy elektroniczne i mikroprocesory. Słowo mechatronika powstało
z poł
ą
czenia cz
ęś
ci słów angielskich MECHAnism i elecTRONICS. Za dat
ę
powstania słowa mechatronika
mo
ż
na przyj
ąć
rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszcz
ę
to starania o uzyskanie
mi
ę
dzynarodowej ochrony dla nazwy mechatronics jako znaku towarowego (z ochrony tej nazwy zrezygnowano
w 1982 r.). W Europie pierwsze wykłady na temat „projektowania zło
ż
onych systemów” (nazwy
mechatronika jeszcze nie u
ż
ywano) prowadzono ju
ż
w latach siedemdziesi
ą
tych XX w. w Szwecji.
Mechatronika jest to synergiczna integracja mechaniki, elektroniki, automatyki i informatyki w procesie
projektowania i wytwarzania produktów.
Mechatronika to synergiczna integracja wielu obszarów wiedzy
Marketing
Wytwarzanie
MECHATRO
MECHATRO
-
-
NIKA
NIKA
Elektronika
analogowa
Czujniki
Elektrotechnika
Mechanika
Komputerowo
wspomagane
projektowanie
CAD
Modelo-
wanie
Symulacja
Sterowanie
cyfrowe
Komputery
Mikroste-
rowniki
Automatyka
Elektroniczne
układy
sterowania
Mechatronika oferuje wprawdzie znaczny potencjał rozwojowy, jednak stawia szczególne wymagania: układy
mechatroniczne ze wzgl
ę
du na sieciowe współdziałanie ró
ż
nych dziedzin wiedzy odznaczaj
ą
si
ę
wysok
ą
zło
ż
ono
ś
ci
ą
. Wynika ona, w porównaniu z układami mechanicznymi, z wi
ę
kszej liczby poł
ą
czonych elementów,
które ponadto s
ą
realizowane w ró
ż
nych specjalno
ś
ciach (heterogeniczno
ść
). Dlatego te
ż
problematyka ta
powinna by
ć
uwzgl
ę
dniana ju
ż
we wczesnych fazach projektowania wyrobów, poniewa
ż
wzajemne
oddziaływanie składników mechanicznych, elektrotechnicznych i informatycznych ma wpływ na ukształtowanie
i przebiegi układu mechatronicznego jako cało
ś
ci.
Rozwój wyrobów odbywał si
ę
dotychczas najcz
ęś
ciej oddzielnie w poszczególnych dziedzinach na podstawie
przyj
ę
tych, specyficznych metod, które były ukształtowane przez własny sposób my
ś
lenia i do
ś
wiadczenia.
Integracja heterogenicznych składników w układ mechatroniczny wymaga jednak wykraczaj
ą
cej poza
dziedziny komunikacji i kooperacji uczestnicz
ą
cych dyscyplin specjalistycznych, aby uzyska
ć
wspólne
wyobra
ż
enie przyszłego wyrobu i opracowa
ć
zoptymalizowane rozwi
ą
zanie. Wraz z rozwojem informatyki
powstało wiele narz
ę
dzi IT (ang. Information Technology), które wspomagaj
ą
projektowanie. Narz
ę
dzia te
umo
ż
liwiaj
ą
wczesne modelowe odwzorowanie i symulacj
ę
układów mechatronicznych.
Dotychczas nie ma jednak ogólnie akceptowanej, jednolitej definicji poj
ę
cia „mechatronika”. Ponadto obserwuje
si
ę
ci
ą
gły rozwój tego poj
ę
cia przez rozszerzanie technologii.
W 1989 r. Schweitzer zdefiniował:
"Mechatronika jest interdyscyplinarn
ą
dziedzin
ą
nauk in
ż
ynierskich, która powstała z klasycznych
dyscyplin takich jak budowa maszyn, elektrotechnika i informatyka. Typowy układ mechatroniczny
przyjmuje sygnały, przetwarza je i wyprowadza po to, aby zamieni
ć
je w siły i ruchy.”
W ten sposób wszystkie postacie czujników, aktuatorów i składników mechanicznych zestawione w
zintegrowany funkcjonalny układ okre
ś
la si
ę
jako mechatronik
ę
. W 1996 r. Harashima, Tomizuka i Fukuda
rozszerzyli to poj
ę
cie:
"[Mechatronika] ... jest synergiczn
ą
integracj
ą
in
ż
ynierii mechanicznej z elektronik
ą
i zaawansowanym
sterowaniem komputerowym podczas projektowania i wytwarzania wyrobów przemysłowych
i procesów”.
Mechatronika – poj
ę
cia podstawowe
6
Dlatego mechatronika odnosi si
ę
nie tylko do integracji funkcyjnej i modułowej, ale tak
ż
e do
zintegrowanego projektowania oraz wytwarzania wyrobów mechatronicznych.
W 1996 r. Van Brussel zmodyfikował i podkre
ś
lił ponaddyscyplinowy sposób post
ę
powania
podczas projektowania układów mechatronicznych: "[Mechatronics needs]... a synergetic
crossfertilization between the different engineering disciplines involved: mechanical
engineering, control engineering, microelectronics and computer science. This is
exactly what mechatronics is aiming at; it is a concurrent-engineering view on machine
design."
W obszarze niemieckoj
ę
zycznym wyst
ę
puje nast
ę
puj
ą
ca definicja zaproponowana przez
Isermann’a: "Mechatronika jest interdyscyplinarn
ą
dziedzin
ą
, w której współdziałaj
ą
nast
ę
puj
ą
ce dyscypliny: układy mechaniczne i poł
ą
czone z nimi układy elektroniczne
oraz technika informatyczna. Układ mechaniczny jest przy tym dominuj
ą
cy w
odniesieniu do funkcji. Oczekiwane s
ą
efekty synergii, które wnosz
ą
wi
ę
cej ni
ż
czyste
sumowanie dyscyplin."
Rdzeniem nowoczesnego rozumienia mechatroniki jest zatem efekt synergiczny ró
ż
nych
technologii. Rozstrzygaj
ą
ce znaczenie maj
ą
zatem nie poszczególne technologie, lecz ich
kombinacja, która umo
ż
liwia to,
ż
e układ optymalnie spełnia swoje zadanie lub mo
ż
na
zrealizowa
ć
nowe funkcjonalno
ś
ci. Integracja technologii musi nast
ą
pi
ć
ju
ż
na pocz
ą
tku
rozwoju wyrobu w pierwszej fazie specyfikacji.
Najkrótsza i najcz
ęś
ciej u
ż
ywana definicja - przyj
ę
ta przez IFToMM
(
International Federation
for the Theory of Machines and Mechanism
)
- okre
ś
la mechatronik
ę
jako synergiczn
ą
kombinacj
ę
mechaniki precyzyjnej, elektronicznego sterowania i systemowego
my
ś
lenia przy projektowaniu produktów i procesów produkcyjnych.
Mechatronika – poj
ę
cia podstawowe c.d.
Obecnie przez mechatronik
ę
rozumie si
ę
działalno
ść
in
ż
yniersk
ą
obejmuj
ą
c
ą
projektowanie, badania oraz eksploatacj
ę
maszyn i urz
ą
dze
ń
,
w których wyst
ę
puje wysoki poziom integracji funkcjonalnej układów
mechanicznych z elektronik
ą
i sterowaniem komputerowym.
Mechatronika jest dziedzin
ą
interdyscyplinarn
ą
, ł
ą
cz
ą
c
ą
w sposób
synergiczny wiedz
ę
z klasycznej budowy maszyn, hydrauliki, pneumatyki,
elektrotechniki, elektroniki, optyki i informatyki.
Celem mechatroniki jest poprawianie (doskonalenie) funkcjonalno
ś
ci
systemów technicznych oraz tworzenie nowych koncepcji maszyn
i urz
ą
dze
ń
z wbudowan
ą
"sztuczn
ą
inteligencj
ą
".
W literaturze przedmiotu spotka si
ę
wiele definicji mechatroniki. Prawie
we wszystkich z nich kładzie si
ę
nacisk na funkcjonaln
ą
integracj
ę
mechanicznych układów wykonawczych z elektronik
ą
i sterowaniem
komputerowym.
I tak np. według Heimann B., Gerth W., Popp K.: „Mechatronika
obejmuje programowalne urz
ą
dzenia elektroniczne i systemy
elektromechaniczne o wbudowanej, rozproszonej strukturze
sensorów, przetwarzania sygnałów, aktuatorów i komunikacji".
Mechatronika – poj
ę
cia podstawowe c.d.
7
Pod koniec lat siedemdziesi
ą
tych XX w. dokonano w Japonii klasyfikacji
urz
ą
dze
ń
mechatronicznych na 4 grupy ró
ż
ni
ą
ce si
ę
stopniem integracji
podsystemów elektronicznych i mikroprocesorowych z mechanik
ą
:
1. urz
ą
dzenia mechaniczne uzupełnione o układy elektroniczne dla poprawy
ich funkcjonalno
ś
ci,
2. znaczna poprawa funkcjonalno
ś
ci urz
ą
dze
ń
mechanicznych (np. maszyny
szwalniczej) uzyskana przez wbudowanie układów elektronicznych, ale
bez zmiany ich tradycyjnego, mechanicznego interfejsu,
3. całkowite zast
ą
pienie mechanizmów wewn
ę
trznych urz
ą
dzenia przez
układ elektroniczny (np. zegarek cyfrowy),
4. synergiczna integracja elementów mechanicznych i elektronicznych (w
tym sterowania) w nowych jako
ś
ciowo urz
ą
dzeniach (np. kserokopiarka).
Synergia
to współdziałanie kilku czynników daj
ą
ce ł
ą
czny efekt
skuteczniejszy ni
ż
suma ich oddzielnych działa
ń
.
Obecnie przewa
ż
a opinia,
ż
e urz
ą
dzenia mechatroniczne powinny w pełni
spełnia
ć
warunki podane w punkcie (4). Oznacza to,
ż
e mechatronika
jest to synergiczna integracja mechaniki, elektroniki, automatyki
i informatyki w procesie projektowania i wytwarzania produktów.
Mechatronika – poj
ę
cia podstawowe c.d.
Urz
ą
dzenia mechatroniczne s
ą
zintegrowanymi zespołami elementów składowych
i podzespołów spełniaj
ą
cych ró
ż
ne funkcje, działaj
ą
cych na ró
ż
nych zasadach
fizycznych i wykorzystuj
ą
cych ró
ż
ne zjawiska. Ich głównym zadaniem jest
czynno
ść
mechaniczna, a istot
ą
jest mo
ż
liwo
ść
reagowania na bod
ź
ce
zewn
ę
trzne docieraj
ą
ce do urz
ą
dzenia poprzez system czujników. Pomi
ę
dzy
sensorami (czujnikami) a elementami wykonawczymi, znajduj
ą
si
ę
układy
przetwarzania i analizy sygnałów, jak równie
ż
element decyzyjny wyposa
ż
ony
w odpowiedni program działania urz
ą
dzenia.
Urz
ą
dzenia mechatroniczne charakteryzuj
ą
si
ę
nast
ę
puj
ą
cymi cechami:
• multifunkcjonalno
ś
ci
ą
, oznaczaj
ą
c
ą
łatwo
ść
realizacji ró
ż
nych zada
ń
przez jedno
urz
ą
dzenie, np. przez zmian
ę
oprogramowania;
• inteligencj
ą
, oznaczaj
ą
c
ą
mo
ż
liwo
ść
podejmowania decyzji i komunikacji
z otoczeniem;
• elastyczno
ś
ci
ą
, czyli łatwo
ś
ci
ą
modyfikacji konstrukcji na etapie projektowania,
produkcji oraz eksploatacji urz
ą
dzenia, np. przez zastosowanie konstrukcji
modułowej;
• mo
ż
liwo
ś
ci
ą
niewidocznego dla operatora sposobu działania, co wymaga
zastosowania interfejsu u
ż
ytkownika dla komunikowania si
ę
z operatorem;
• zale
ż
no
ś
ci
ą
od wymaga
ń
rynkowych i mo
ż
liwo
ś
ci technologicznych wykonania.
Mechatronika – podstawy
8
Jednak najwa
ż
niejszym aspektem mechatroniki jest to,
ż
e maszyny
i urz
ą
dzenia mechatroniczne s
ą
wyrazem na
ś
ladownictwa przyrody
(bionika). W otoczeniu naturalnym takie układy s
ą
powszechne
i umo
ż
liwiaj
ą
funkcjonowanie istot
ż
ywych w zmiennych warunkach
naturalnego
ś
rodowiska.
Istotn
ą
cech
ą
urz
ą
dze
ń
mechatronicznych jest zdolno
ść
do wiernego
przetwarzania i przekazywania informacji (w formie sygnałów
mechanicznych,
elektrycznych,
pneumatycznych,
optycznych
i innych), przy jednoczesnym wysokim stopniu automatyzacji tych
urz
ą
dze
ń
. Systemy
mechatroniczne
wyposa
ż
one s
ą
w czujniki
zbieraj
ą
ce sygnały ze swojego otoczenia, programowalne układy
przetwarzania
i
interpretacji
tych
sygnałów
oraz
zespoły
komunikacyjne i urz
ą
dzenia wykonawcze oddziałuj
ą
ce odpowiednio na
otoczenie. Ich inteligencja polega na reagowaniu na polecenia
człowieka i otoczenia oraz przekazywaniu informacji zwrotnych
i realizowaniu tych polece
ń
.
Projektowanie urz
ą
dze
ń
mechatronicznych, ich budowa, u
ż
ytkowanie,
analiza pracy i diagnostyka eksploatacyjna, wymagaj
ą
specjalnego
podej
ś
cia
metodycznego
i
systemowego,
niestosowanego
w konwencjonalnych dziedzinach techniki, np. w mechanice.
Mechatronika – podstawy
Mechatronika jest synergicznym poł
ą
czeniem mechaniki precyzyjnej, elektronicznych układów steruj
ą
cych
i informatyki w celu projektowania, wytwarzania i eksploatacji inteligentnych systemów automatyki.
Mechatronika nie jest to
ż
sama ani z automatyk
ą
, ani robotyk
ą
, czy te
ż
automatyzacj
ą
produkcji. Mechatronika
mo
ż
e by
ć
uznana za nowoczesne uj
ę
cie technik automatyzacji dla szeroko rozumianych potrzeb in
ż
ynierii
i edukacji. Mo
ż
na przyj
ąć
,
ż
e mechatronika jest interdyscyplinarn
ą
dziedzin
ą
nauki i techniki zajmuj
ą
c
ą
si
ę
generalnie problemami mechaniki, elektroniki i informatyki. Jednak zawiera ona tak
ż
e wiele obszarów para-
mechatronicznych, które tworz
ą
fundament mechatroniki i pokrywaj
ą
wiele znanych dyscyplin, takich jak:
elektrotechnika, energoelektronika, technika cyfrowa, technika mikroprocesorowa, techniki regulacyjne i inne.
Mechatronika zacz
ę
ła si
ę
dynamicznie rozwija
ć
dopiero w latach 80. XX w. i to głównie ze wzgl
ę
du na
wymagania rynku. Natomiast elementy elektryczne i elektroniczne w układach mechanicznych zacz
ę
to
wprowadza
ć
ju
ż
w latach czterdziestych XX w., a urz
ą
dzenia z tego okresu mo
ż
na nazwa
ć
pierwsz
ą
generacj
ą
mechatroniki. Rozwój informatyki od pocz
ą
tku lat 70. XX w. spowodował,
ż
e logiczne i decyzyjne
elementy elektroniczne zacz
ę
to zast
ę
powa
ć
mikroprocesorami z odpowiednim oprogramowaniem. Etap ten
mo
ż
na uzna
ć
za drug
ą
generacj
ę
mechatroniki. Lata 80. przyniosły dalszy jej rozwój, zmierzaj
ą
cy w kierunku
uzyskania zintegrowanych elementów zapewniaj
ą
cych funkcjonowanie skomplikowanych urz
ą
dze
ń
, maszyn
i systemów.
Zapocz
ą
tkowało to rozwój mechatroniki trzeciej generacji, przedmiotem zainteresowania której s
ą
urz
ą
dzenia charakteryzuj
ą
ce si
ę
wielofunkcyjno
ś
ci
ą
i du
żą
zło
ż
ono
ś
ci
ą
konstrukcji. Uwa
ż
a si
ę
,
ż
e pierwszym
wyrobem mechatronicznym była obrabiarka sterowana numerycznie NC (ang. Numerical Control) do produkcji
ś
migieł helikoptera, skonstruowana w MIT (ang. Massachusetts Institute of Technology, USA) w 1952 r.
Do podstawowych produktów mechatronicznych mo
ż
na zaliczy
ć
drukarki laserowe lub atramentowe,
kserokopiarki nowej generacji, sterowane cyfrowo maszyny do szycia i maszyny dziewiarskie, elektronicznie
sterowany silnik spalinowy, ró
ż
ne systemy (np. przeciwblokuj
ą
ce i przeciwpo
ś
lizgowe) w technice
samochodowej, obrabiarki sterowane numerycznie, roboty i manipulatory itp. Produktami mechatronicznymi
s
ą
miniaturowe kamery video, odtwarzacze CD i wiele mikromaszyn, ale równie
ż
du
ż
e maszyny rolnicze
i drogowe nowej generacji oraz wielkogabarytowe systemy i linie produkcyjne.
Mechatronika - podstawy
9
Mechatronika pozwala na uzyskanie o wiele wi
ę
kszych efektów ani
ż
eli konwencjonalnie
realizowany rozwój i działanie elektromechanicznych lub elektroniczno-mechanicznych układów
z sumowanym i najcz
ęś
ciej dodatkowym uzupełnieniem biernych mechanicznych struktur za
pomoc
ą
wspomaganych programowo i elektronicznie sterowanych (regulowanych) składników.
Systemy
mechatroniczne
pozostaj
ą
pod silnym wpływem realizowanego od pocz
ą
tku
interdyscyplinarnego projektowania, konstrukcji i rozwoju zło
ż
onych urz
ą
dze
ń
, systemów
i instalacji. Dzi
ę
ki temu uzyskuje si
ę
całkowicie nowe, cz
ęś
ciowo nawet zaskakuj
ą
ce mo
ż
liwo
ś
ci
techniczne, umo
ż
liwiaj
ą
ce przesuni
ę
cie funkcjonalno
ś
ci z biernych struktur mechanicznych do
aktywnych,
sterowanych
programowo
elektronicznych
składników,
w
poł
ą
czeniu
z
zaawansowanymi
(inteligentnymi)
czujnikami
i
aktuatorami
oraz
elektronicznym
przetwarzaniem informacji z odpowiednim oprogramowaniem.
Przykładami systemów mechatronicznych w przemy
ś
le samochodowym s
ą
: elektroniczne
zarz
ą
dzanie silnikiem, układ zapobiegaj
ą
cy blokowaniu kół podczas hamowania (ABS), układ
przeciwdziałaj
ą
cy po
ś
lizgom (ASR) oraz układ regulacji dynamiki jazdy (FDR).
Natomiast przykładami układów mechatronicznych w budowie maszyn i instalacji s
ą
: pracuj
ą
ce
w znacznym stopniu autonomicznie roboty przemysłowe, urz
ą
dzenia z samoczynnymi układami
mocowania, narz
ę
dzia z samoczynnym, automatycznym nastawianiem oraz bezstykowo
regulowane ło
ż
yska powietrzne i magnetyczne.
W przemy
ś
le elektrotechnicznym, elektronicznym i komputerowym przykładami systemów
mechatronicznych s
ą
: nowe generacje przyrz
ą
dów pomiarowych, układy pomiarowe, czujniki,
aktuatory, kamery wideo, comcordery, dyski twarde, drukarki, plotery i kserografy.
Rozwój tego rodzaju nowoczesnych wyrobów wi
ąż
e si
ę
realizacj
ą
trudnych zada
ń
o bardzo
wysokich wymaganiach dotycz
ą
cych opanowania i stosowania najnowszych technologii
z obszaru: mechaniki, elektroniki/ mikroelektroniki i informatyki, aktuatoryki, sensoryki, optyki
oraz techniki mikrosystemów i fotoniki.
Mechatronika – podstawy
Definicja poj
ę
cia mechatronika
Klasyczna mechanika zajmuje si
ę
problemem, jaki ruch wykonuje ciało, je
ż
eli działa na nie
okre
ś
lona siła w warunkach wyst
ę
puj
ą
cych wi
ę
zów. Jednak obecnie, w odniesieniu do układów
cz
ę
sto rozpatruje si
ę
odwrotne sformułowanie problemu, tzn. jaka siła musi działa
ć
na ciało, aby
uzyska
ć
okre
ś
lony jego ruch tak
ż
e w warunkach działania zakłóce
ń
. Realizacja techniczna
takiego syntetycznego zadania wymaga wł
ą
czenia do mechaniki tak
ż
e innych dyscyplin takich
jak elektrotechnika, elektronika i informatyka.
Wszystkie definicje mechatroniki ł
ą
czy to,
ż
e okre
ś
laj
ą
j
ą
jako interdyscyplinarny sposób
post
ę
powania podczas rozwoju wyrobów oraz współdziałanie składników z poszczególnych
obszarów w celu uzyskania funkcjonalno
ś
ci tych wyrobów. Je
ż
eli jednak wcze
ś
niej na plan
pierwszy wysuwał si
ę
wyrób mechatroniczny, to obecnie z mechatronik
ą
s
ą
równie
ż
zwi
ą
zane
przebiegi i zale
ż
no
ś
ci wyst
ę
puj
ą
ce podczas rozwoju i produkcji systemów mechatronicznych.
Mechatronika stanowi nowy rodzaj my
ś
lenia i działania, w którym wszystkie uczestnicz
ą
ce
dyscypliny musz
ą
by
ć
wspólnie rozpatrywane i traktowane. Jest to zatem wi
ę
cej ni
ż
tylko suma
tych obszarów.
Mo
ż
na zatem sformułowa
ć
jeszcze nast
ę
puj
ą
c
ą
definicj
ę
mechatroniki:
Mechatronika jest najwi
ę
ksz
ą
z mo
ż
liwych integracj
ą
mechaniki, elektrotechniki,
elektroniki i informatyki w jednym no
ś
niku funkcji. Obejmuje to zarówno integracj
ę
funkcyjn
ą
, jak i sposób post
ę
powania podczas rozwoju i produkcji wyrobów.
Integracja geometryczna nie jest
ż
adnym koniecznym warunkiem mechatroniki. Pod poj
ę
ciem
no
ś
nika funkcji rozumie si
ę
zamkni
ę
ty układ (system), który nie musi by
ć
koniecznie
umieszczony w jednej obudowie. Przykładem tego jest robot przemysłowy, który za pomoc
ą
kabla jest poł
ą
czony z układem sterowania.
10
Co to jest mechatronika?
Pod poj
ę
ciem mechatroniki rozumie si
ę
interdyscyplinarny rozwój wyrobów, które
ukierunkowane mechanicznie zadania realizuj
ą
przez wykorzystanie przestrzennej
i funkcjonalnej integracji składników mechanicznych, elektrycznych i informatycznych.
Wyroby mechatroniczne odznaczaj
ą
si
ę
uproszczon
ą
konstrukcj
ą
mechaniczn
ą
,
wy
ż
sz
ą
dokładno
ś
ci
ą
, zintegrowanym samo-nadzorowaniem i diagnostyk
ą
bł
ę
dów,
rozszerzonymi warunkami pracy oraz łatwiejsz
ą
obsług
ą
. Uzyskiwana w ten sposób
rozszerzona funkcjonalno
ść
wyrobów jest cz
ę
sto rozstrzygaj
ą
cym czynnikiem
przewagi konkurencyjnej na rynku.
Dzi
ę
ki temu daj
ą
si
ę
wytwarza
ć
w pełni nowe wyroby lub te
ż
wyroby ze znacznie
ulepszonymi własno
ś
ciami, np. w samochodach - systemy do kierowania,
hamowania i zarz
ą
dzania silnikiem oraz do aktywnego zapewniania bezpiecze
ń
stwa
(ABS, ESP), w obszarze artykułów konsumpcyjnych - kamery z nap
ę
dami
piezoelektrycznymi, odtwarzacze CD z ultraszybkimi jednostkami pozycjonuj
ą
cymi,
w medycynie - inteligentne protezy i roboty (ang. human assistance) lub w technikach
wytwarzania - mikroroboty z elementami z pami
ę
ci
ą
kształtu.
Wymagane kompetencje in
ż
ynierów uczestnicz
ą
cych w pracach nad rozwojem
wyrobów mechatronicznych, ze wzgl
ę
du na pogł
ę
biaj
ą
c
ą
si
ę
specjalizacj
ę
, wymagaj
ą
podej
ś
cia interdyscyplinarnego. Bardziej wskazana jest wiedza wykraczaj
ą
ca poza
poszczególne obszary w postaci wspólnych podstaw, aby umo
ż
liwi
ć
synergiczn
ą
(tzn.
korzystn
ą
) współprac
ę
specjalistów z ró
ż
nych dziedzin dla zapewnienia optymalnego
ukształtowania wyrobu.
Pod poj
ę
ciem „mechatronika” rozumie si
ę
funkcjonaln
ą
, a tak
ż
e przestrzenn
ą
integracj
ę
składników
mechanicznych i elektronicznych oraz oprogramowania w jednym obiekcie (systemie). Ta interdyscyplinarna
dziedzina specjalno
ś
ci stanowi pomost pomi
ę
dzy ró
ż
nymi obszarami. Nowoczesne wyroby techniczne
składaj
ą
si
ę
bardzo cz
ę
sto nie tylko ze składników czysto mechanicznych lub czysto elektrycznych/
elektronicznych. Wskutek tego problematyka mechatroniczna wyst
ę
puje wsz
ę
dzie tam, gdzie przez
odpowiednie poł
ą
czenie metod/ narz
ę
dzi poszczególnych dyscyplin mo
ż
na uzyska
ć
popraw
ę
budowanych
systemów.
Wcze
ś
niej elektronika pojawiała si
ę
jako dodatek podczas wyposa
ż
ania maszyn i instalacji i cz
ę
sto słu
ż
yła
ona tylko do zwi
ę
kszenia wygody obsługi. Jednak takie podej
ś
cie w ostatnich latach zostało ju
ż
w znacznym
stopniu zarzucone. I tak np. wcze
ś
niej w maszynach drukarskich nap
ę
d i cykl pracy był realizowany
w sposób czysto mechaniczny za pomoc
ą
wału głównego, przekładni i sprz
ę
gieł. Natomiast obecnie
elektronika jest integraln
ą
cz
ęś
ci
ą
całego procesu drukowania, co pozwala na w pełni automatyczny jego
przebieg. Najwi
ę
ksza zaleta takiego rozwi
ą
zania polega na tym,
ż
e takie systemy s
ą
ta
ń
sze, poniewa
ż
cz
ęś
ci
mechaniczne mo
ż
na zast
ą
pi
ć
ta
ń
sz
ą
elektronik
ą
, która jest ponadto bardziej niezawodna i lepsza
w piel
ę
gnacji, gdy
ż
jest ona odpowiednia do samonadzorowania, a tak
ż
e dokładniejsza dzi
ę
ki temu,
ż
e
precyzj
ę
uzyskuje si
ę
nie przez stabilno
ść
mechaniczn
ą
, a za pomoc
ą
elektronicznych pomiarów i regulacji.
Obecnie na rynek wchodz
ą
coraz nowsze wyroby mechatroniczne. I tak np. nowy samochód osobowy
mercedes klasy S Coupé dysponuje aktywnym zawieszeniem, dzi
ę
ki czemu komfort jazdy znacznie si
ę
poprawił. Innymi przykładami systemów mechatronicznych s
ą
: odtwarzacz CD, system ABS w samochodach,
automatyczna przekładnia (skrzynia biegów), elektrownie wiatrowe, a nawet taki sprz
ę
t AGD jak pralka
automatyczna. Systemy mechatroniczne pozwalaj
ą
na to,
ż
e dzi
ę
ki
ś
cisłej interakcji budowy maszyn,
elektrotechniki/ elektroniki i informatyki podczas projektowania, wytwarzania i piel
ę
gnacji w nowoczesnych
maszynach (wyrobach) b
ę
dzie mo
ż
na wykorzysta
ć
wiele efektów synergii. Wa
ż
nym aspektem jest tak
ż
e
miniaturyzacja wyrobów, dzi
ę
ki czemu ci
ą
gle coraz wi
ę
cej funkcji i niezb
ę
dnych do tego celu składników
mo
ż
na umie
ś
ci
ć
wewn
ą
trz małej obj
ę
to
ś
ci. System mechatroniczny zawiera zawsze składniki mechaniczne,
elementy elektroniczne w postaci standardowego sprz
ę
tu, ł
ą
cznie z sensorami i aktuatorami, modułami
regulacji wraz z przetwarzaniem informacji oraz odpowiednie oprogramowanie. Cało
ś
ciowy sposób
rozpatrywania dotyczy zarówno rozwoju systemu mechatronicznego jak i jego technicznej realizacji.
Co to jest mechatronika?
11
Pierwotnie, tzn. na pocz
ą
tku lat 70. XX w. termin mechatronika odnosił si
ę
do kombinacji mechaniki
i elektroniki. Jednak wskutek rosn
ą
cej integracji systemów wbudowanych ES (ang. Embedded Systems)
oprogramowanie stało si
ę
dodatkowym no
ś
nikiem funkcji, który umo
ż
liwił uzyskanie w nowych wyrobach
prawie dowolnej funkcjonalno
ś
ci. Był to istotny przeskok w rozwoju wyrobów, który spowodował,
ż
e
mechatronika uzyskała strategiczne znaczenie w innowacyjno
ś
ci i konkurencji na rynku.
Mechatronika - integracja mechaniki,
elektroniki i oprogramowania
Współpraca
pracowników
Mechatronika
Mikro-
mechanika
Mikro-
optyka
Czujniki
Elektronika
mocy
Aktuatory
Technologie
mikrosystemów
Kwalifikacje
pracowników s
ą
wielostronne
Składy zespołów
zmieniaj
ą
si
ę
szybciej
Wska
ź
niki innowacji
Czasy rozwoju
Czas
Układy mechatroniczne ł
ą
cz
ą
elementy mechaniczne, nap
ę
dowe, czujnikowe jak równie
ż
pozostałe
składniki sprz
ę
tu i oprogramowania w jednej, zwartej jednostce funkcyjnej. Tak wi
ę
c poj
ę
cie mechatroniki
mo
ż
e by
ć
synonimem zaawansowanych jednostek funkcyjnych o wysokim stopniu integracji. Jednak
odpowiedzi na pytanie: „Jak szeroko powinno by
ć
ujmowane poj
ę
cie układ mechatroniczny?” - nie
jest prosto udzieli
ć
. Czy układ nap
ę
dowy składaj
ą
cy si
ę
z kombinacji takich urz
ą
dze
ń
jak np.: silnik,
prowadnice liniowe i wył
ą
czniki kra
ń
cowe jest ju
ż
systemem mechatronicznym? Nale
ż
ałoby na to
odpowiedzie
ć
,
ż
e nie. Dla układu mechatronicznego charakterystyczna powinna by
ć
integracja funkcji
prowadz
ą
ca do redukcji interfejsów u
ż
ytkownika. Zatem poj
ę
cie układ mechatroniczny daje si
ę
ograniczy
ć
do zwartych i zaawansowanych (inteligentnych) jednostek funkcyjnych.
Przykładem mechatronicznego modułu nap
ę
dowego jest kompaktowa jednostka, w której zintegrowano
silnik, układ pomiaru poło
ż
enia, przekładni
ę
, elektronik
ę
mocy oraz układ sterowania poło
ż
eniem
z ró
ż
nymi interfejsami miejscowych sieci komunikacyjnych (ang. Fieldbus). Ró
ż
norodne moduły
nap
ę
dowe i regulacyjne tworz
ą
idealne warunki do optymalnej realizacji ró
ż
nych aplikacji. Pozwala to na
zmniejszenie kosztów, zwi
ę
kszenie elastyczno
ś
ci zastosowa
ń
dzi
ę
ki wi
ę
kszej funkcjonalno
ś
ci oraz
uproszczenie piel
ę
gnacji. Mechatronika odpowiada trendowi wi
ę
kszej integracji i efektywno
ś
ci, przy
równoczesnej poprawie niezawodno
ś
ci i zdolno
ś
ci komunikacyjnej. Wszystkie te czynniki upraszczaj
ą
wykorzystanie maszyn i instalacji.
Oczekiwania u
ż
ytkowników ko
ń
cowych dotycz
ą
szczególnie wzrostu wydajno
ś
ci i dokładno
ś
ci,
zwi
ę
kszenia elastyczno
ś
ci, zmniejszenia zapotrzebowania na miejsce, a tak
ż
e poprawy struktury
kosztów. Rozwi
ą
zania mechatroniczne cz
ę
sto tworz
ą
tak
ż
e baz
ę
innowacyjn
ą
dla technologicznego
rozwoju wyrobów zgodnie z oczekiwaniami klientów. Dzi
ę
ki podej
ś
ciu mechatronicznemu mo
ż
liwe jest
równie
ż
znaczne zredukowanie nakładów zwi
ą
zanych z monta
ż
em i okablowaniem, co powoduje
znaczne zmniejszenie lub nawet wyeliminowanie szaf sterowniczych. I tak np. rozproszone
(zdecentralizowane) rozwi
ą
zania nap
ę
dów zwi
ę
kszaj
ą
elastyczno
ść
, a cz
ę
sto tak
ż
e szybko
ść
(wydajno
ść
) produkcji. Przeprowadzane dotychczas tylko w sposób r
ę
czny czynno
ś
ci ustawiania
i justowania dzi
ę
ki inteligentnym (zaawansowanym), kompaktowym nap
ę
dom daje si
ę
w prosty sposób
zautomatyzowa
ć
.
Cechy układów mechatronicznych
12
Mechatronik to in
ż
ynier poruszaj
ą
cy si
ę
w dziedzinie nauki i techniki zwi
ą
zanej z wytwarzaniem
wyrobów, które stanowi
ą
synergiczn
ą
kombinacj
ę
mechaniki precyzyjnej, elektronicznego
sterowania oraz systemowego my
ś
lenia przy projektowaniu produktów i procesów
produkcyjnych. Mechatronika jest dziedzin
ą
interdyscyplinarn
ą
, bowiem oprócz mechaniki,
elektroniki i informatyki, obejmuje ona szereg innych dyscyplin, takich jak in
ż
ynieria materiałowa,
optyka, a nawet bioin
ż
ynieria.
Mechatronikowi niezb
ę
dne s
ą
predyspozycje ogólnoin
ż
ynierskie - ciekawo
ść
zasady działania
wszelkich urz
ą
dze
ń
technicznych, szczególnie z zakresu automatyki. Musi on oczywi
ś
cie
posiada
ć
tak
ż
e pewne uzdolnienia matematyczne oraz by
ć
kreatywny technicznie. Musi te
ż
by
ć
otwarty na wiedz
ę
interdyscyplinarn
ą
- zna
ć
si
ę
na wielu dziedzinach: mechanice, elektronice,
sterowaniu, oprogramowaniu. A to z kolei wymusza na nim konieczno
ść
my
ś
lenia globalnego,
cało
ś
ciowego (pod k
ą
tem wielu u
ż
ytkowników danej konstrukcji). Wreszcie mechatronik musi
posiada
ć
umiej
ę
tno
ść
pracy zespołowej i koordynacji oraz kierowania zespołami in
ż
ynierskimi.
Oznacza to tak
ż
e umiej
ę
tno
ść
łatwego nawi
ą
zywania kontaktów mi
ę
dzyludzkich.
Mechatronika jest jedn
ą
z młodszych dziedzin nauki i techniki. Jej rozwój rozpocz
ą
ł si
ę
wła
ś
ciwie
dopiero w latach 80. XX w. Wzrastaj
ą
ce zapotrzebowanie na automatyzacj
ę
procesów
produkcyjnych i powtarzalno
ść
procesów technologicznych spowodowały próby zast
ą
pienia
w wielu dziedzinach r
ą
k ludzkich maszynami i urz
ą
dzeniami (np. roboty przemysłowe czy
obrabiarki sterowane numerycznie). Zacz
ę
to wprowadza
ć
tak
ż
e manipulatory wielofunkcyjne,
programowalne roboty, specjalnie zaprojektowane urz
ą
dzenia do przemieszczania cz
ęś
ci,
narz
ę
dzi i innych materiałów. Odt
ą
d tworzy si
ę
dedykowane urz
ą
dzenia o zaprogramowanym
ruchu, które wykonuj
ą
okre
ś
lone prace i s
ą
wykorzystywane do obsługi całych
zautomatyzowanych linii produkcyjnych, np. w montowniach samochodów czy podczas
wytwarzania układów scalonych lub leków.
Mechatronik – wymagania i predyspozycje zawodu
Mechatronik jest cz
ę
sto koordynatorem, który współpracuje z ró
ż
nymi specjalistami podczas realizacji
projektów dotycz
ą
cych rozwoju wyrobów mechatronicznych. Przed in
ż
ynierem mechatronikiem otwieraj
ą
si
ę
nast
ę
puj
ą
ce mo
ż
liwo
ś
ci działania:
Badania: opracowywanie matematycznych i fizycznych podstaw oraz metod. Wyroby s
ą
kształtowane od
nowa, wzgl. istniej
ą
ce ju
ż
wyroby podlegaj
ą
udoskonaleniu. Taka działalno
ść
wymaga pogł
ę
bionej wiedzy
z nauk podstawowych.
Rozwój: koncepcja, obliczanie i konstruowanie nowych systemów, maszyn i urz
ą
dze
ń
w działach
rozwojowych (laboratoriach) i biurach projektowych. Opracowywanie programów dla sterowników
(mikrokomputerów), inteligentnych składników i systemów oraz rozwój oprogramowania do
wspomaganych komputerowo prac podczas rozwoju wyrobów.
Wytwarzanie: projektowanie technologiczne, wytwarzanie, sprawdzanie (kontrola) i badania wyrobów
mechatronicznych.
Projektowanie: projektowanie systemowe i planowanie wyrobów mechatronicznych we współpracy ze
zleceniodawcami i wytwórcami a
ż
do uzyskania dojrzałego wyrobu.
Sprzeda
ż
: dystrybucja i doradzanie techniczne klientom w zakresie komponentów mechatronicznych.
Eksploatacja: u
ż
ytkowanie maszyn i instalacji, piel
ę
gnacja i utrzymanie ruchu.
Monta
ż
: składanie i uruchamianie maszyn i urz
ą
dze
ń
mechatronicznych ł
ą
cznie z ich przekazaniem do
zleceniodawcy.
Nadzorowanie: np. zapewnienie bezpiecze
ń
stwa pracy maszyn i instalacji. Kontrola i badania urz
ą
dze
ń
mechatronicznych itd.
Zawód in
ż
yniera mechatronika daje zatem wiele mo
ż
liwo
ś
ci pracy i działa
ń
. Wymaga to jednak ci
ą
głego
nad
ąż
ania za rozwojem technicznym sprz
ę
tu i oprogramowania, a tak
ż
e metod i systemów
komputerowych wspomagaj
ą
cych realizacj
ę
projektów.
Zakres działania mechatronika
13
W wyniku kształcenia na kierunku Mechatronika absolwent politechniki powinien umie
ć
:
• oblicza
ć
parametry charakteryzuj
ą
ce urz
ą
dzenia i systemy mechatroniczne,
• wykonywa
ć
pomiary wielko
ś
ci elektrycznych i nieelektrycznych oraz interpretowa
ć
ich
wyniki,
• instalowa
ć
i obsługiwa
ć
systemy sieciowe transmisji danych stosowane w mechatronice,
• projektowa
ć
urz
ą
dzenia i systemy mechatroniczne,
• programowa
ć
urz
ą
dzenia i systemy mechatroniczne,
• dozorowa
ć
prac
ę
maszyn, urz
ą
dze
ń
i systemów mechatronicznych oraz ocenia
ć
ich stan
techniczny,
• prowadzi
ć
dokumentacj
ę
techniczn
ą
, techniczno – ruchow
ą
urz
ą
dze
ń
i systemów
mechatronicznych,
• przestrzega
ć
przepisów bezpiecze
ń
stwa i higieny pracy, ochrony przeciwpo
ż
arowej oraz
ochrony
ś
rodowiska,
• organizowa
ć
stanowisko pracy zgodnie z wymaganiami ergonomii,
• stosowa
ć
przepisy prawa w zakresie wykonywanych zada
ń
zawodowych,
• komunikowa
ć
si
ę
w j
ę
zyku obcym w zakresie wykonywanych zada
ń
,
• korzysta
ć
z ró
ż
nych
ź
ródeł informacji w celu doskonalenia si
ę
i aktualizowania wiedzy
zawodowej.
Mechatronik – wiedza i umiej
ę
tno
ś
ci
Mechatronika pojawiła si
ę
równie
ż
w naszym
ż
yciu codziennym, np. w postaci
automatycznie otwieranych drzwi, aparatów fotograficznych z autofocusem, czy
automatów sprzedaj
ą
cych. Nast
ą
piła tak
ż
e szybka miniaturyzacja i zwi
ę
kszenie
niezawodno
ś
ci elementów elektronicznych - logicznych i decyzyjnych. Szybko zacz
ę
to
je zast
ę
powa
ć
mikroprocesorami z odpowiednim oprogramowaniem. Był to pocz
ą
tek
rozwoju zaawansowanych metod sterowania.
Obecnie w mechatronice trwa udoskonalanie technik przekazywania informacji, co
wydatnie zwi
ę
ksza mo
ż
liwo
ś
ci u
ż
ytkowe mikroprocesorów. W wi
ę
kszo
ś
ci tych układów,
wykorzystuj
ą
cych w ró
ż
nym stopniu bazy danych, stosuje si
ę
układy zaawansowanego
(inteligentnego) sterowania. Nawet w urz
ą
dzeniach powszechnego u
ż
ytku, takich jak
np. automatyczna pralka, instaluje si
ę
układy oparte na metodach i technikach
sztucznej inteligencji. Wiele wyrafinowanych układów mechatronicznych znalazło tak
ż
e
szerokie zastosowanie w przemy
ś
le samochodowym. Systemy nawigacji, które tak
niedawno by
ł
y rzadko
ś
ci
ą
, obecnie instaluje si
ę
ju
ż
w pojazdach seryjnych.
W niedalekiej przyszło
ś
ci na pewno wprowadzone zostan
ą
jeszcze „inteligentniejsze”
wyroby mechatroniczne, podnosz
ą
ce komfort i bezpiecze
ń
stwo pojazdów.
W latach 80. XX w. do mechatroniki wkroczyła tak
ż
e optyka, w wyniku czego narodziła
si
ę
optomechatronika, a w latach 90. wprowadzono technik
ę
komunikacji, słu
żą
c
ą
do
ł
ą
czenia oddzielnych, konwencjonalnych układów. Wiele urz
ą
dze
ń
ma równie
ż
mo
ż
liwo
ść
zdalnego sterowania, a rozpowszechnia si
ę
mechatronika z sieciowym
sterowaniem komputerowym.
Rozwój mechatroniki
14
Dziesi
ęć
technologii, które zmieni
ą
ś
wiat
Mobilne sieci ad-hoc
Molekuły glukozy
Grid Computing
Biosubstancje
i technika
komórkowa
Metody nano-kształtowania
(nanotechnologie)
Nano-energia słoneczna
Komputery kwantowe
Automatyczna weryfikacja
oprogramowania
Wizualizacja molekularna
Mechatronika
Przykładami wyrobów mechatronicznych
s
ą
:
• układy kierowania, hamowania (ABS),
sterowania silnikiem, poduszki
powietrzne, aktywne zawieszenie,
stabilizacja toru jazdy i tempomat
w nowoczesnych samochodach,
• innowacyjne systemy wytwarzania takie
jak obrabiarki sterowane numerycznie
CNC (ang. Computerized Numerical
Control) i roboty przemysłowe,
• sprz
ę
t elektroniczny taki jak kamery,
odtwarzacze CD itp.
Mo
ż
liwo
ś
ci wyrobów mechatronicznych
wynikaj
ą
z zawansowanego
współdziałania składników
mechanicznych, elektrycznych/
elektronicznych i przetwarzania
informacji.
Przykłady wyrobów mechatronicznych
15
Konwencjonalny sposób post
ę
powania podczas projektowania wyrobów odznacza si
ę
sekwencyjnym przebiegiem, tzn. najpierw tworzona jest konstrukcja mechaniczna,
a nast
ę
pnie składniki elektryczne/ elektroniczne i ewentualnie oprogramowanie.
Rzeczywisty wyrób (maszyna, urz
ą
dzenie) po zako
ń
czeniu fazy projektowania jest
budowana jako prototyp i dopiero wtedy poddawana testom.
Natomiast cech
ą
nowego (mechatronicznego) sposobu post
ę
powania podczas rozwoju
np. maszyny jest to,
ż
e od pocz
ą
tku równolegle (współbie
ż
nie) współpracuj
ą
ze sob
ą
projektanci zespołów mechanicznych i elektrycznych (elektronicznych), tworz
ą
c wirtualn
ą
maszyn
ę
przy wspomaganiu przez ekspertów od mechatroniki.
Testy wirtualnej maszyny s
ą
zatem realizowane ju
ż
na pocz
ą
tku jej rozwoju. Dzi
ę
ki
równoległej (współbie
ż
nej) pracy wspólnie uzyskiwany jest
żą
dany wynik oraz wspólnie
ponosi si
ę
odpowiedzialno
ść
.
Dalsz
ą
cech
ą
jest pewno
ść
,
ż
e wyniki rozwoju mo
ż
na zweryfikowa
ć
za pomoc
ą
symulacji,
a wi
ę
c jeszcze zanim wyrób (np. maszyna) zostanie rzeczywi
ś
cie zbudowany.
Trzecim rozstrzygaj
ą
cym aspektem zastosowania mechatronicznego podej
ś
cia jest to,
ż
e
tego rodzaju nowe sposoby rozwoju s
ą
zwi
ą
zane ze znacznie ni
ż
szymi kosztami i
szybszym wprowadzaniem wyrobów na rynek.
Ka
ż
dy wyrób powstaje na podstawie pomysłu i celów, które z jego pomoc
ą
powinny by
ć
uzyskane. Wyra
ź
ne zdefiniowanie celu jest rozstrzygaj
ą
ce dla wła
ś
ciwie zorganizowanego
przebiegu, aby przyj
ąć
wspóln
ą
odpowiedzialno
ść
za post
ę
p i wynik prac konstrukcji
mechanicznej i elektrycznej oraz oprogramowania.
Mechatroniczny rozwój wyrobów
Mechatronika - wprowadzenie
Czujniki
Aktuatory
Wielko
ś
ci
fizyczne
Wielko
ś
ci
mierzone
Struktura
Struktura
mechaniczna
mechaniczna
Wielko
ś
ci nastawiaj
ą
ce
Przekładnie
i
prowadnice
Ruchy
Przetwarzanie wielko
ś
ci
mierzonych
Komputer
Jednostka mocy
Meldunki zwrotne
Siły
Ruchy
Otoczenie
Otoczenie
(
ś
rodowisko)
(
ś
rodowisko)
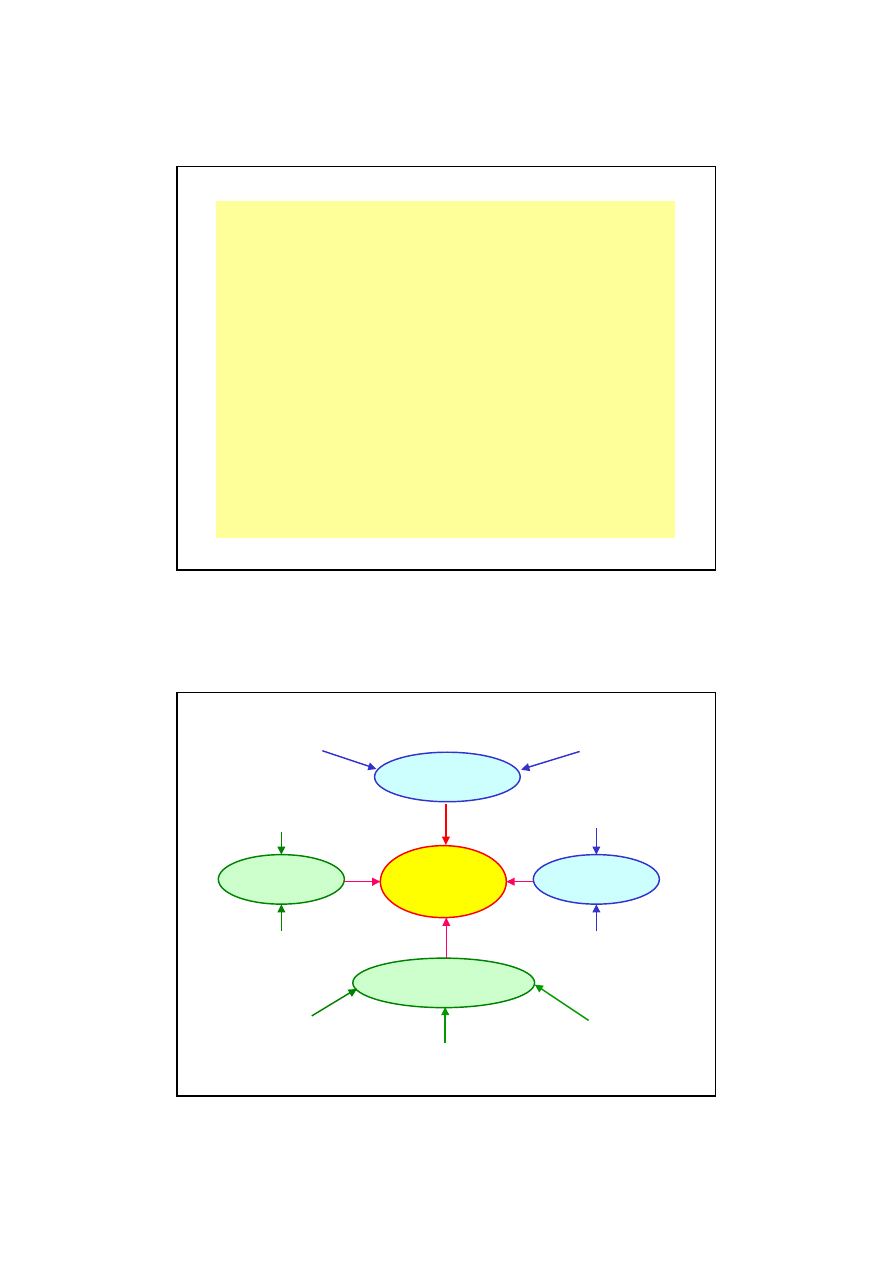
Typowy układ
mechatroniczny
przyjmuje sygnały,
przetwarza je,
a nast
ę
pnie
wyprowadza
sygnały, które s
ą
przetwarzane np.
na siły i ruchy.
16
Mechatronika rozszerza układy mechaniczne przez sensory, mikrokomputery, oprogramowanie
i aktuatory. Takie zintegrowane rozwi
ą
zania przyjmuj
ą
sygnały ze swojego otoczenia,
przetwarzaj
ą
je i wykonuj
ą
odpowiednie działania uzale
ż
nione od zada
ń
i sytuacji. Dzi
ę
ki
poł
ą
czeniu zawansowanych (inteligentnych) składników sprz
ę
tu (hardware) i oprogramowania
(software) znacznej poprawie ulegaj
ą
mo
ż
liwo
ś
ci konwencjonalnych układów oraz staje si
ę
mo
ż
liwa realizacja w pełni nowych funkcji.
Stopie
ń
integracji układów mechatronicznych jest cz
ę
sto tak znaczny,
ż
e pełn
ą
funkcjonalno
ść
mo
ż
na uzyska
ć
tylko przez perfekcyjne współdziałanie ró
ż
nych składników. I tak np. wysokie
wymagania dotycz
ą
ce dokładno
ś
ci obróbki mechanicznej lub zautomatyzowanego monta
ż
u
mo
ż
na efektywnie zrealizowa
ć
dopiero wtedy, gdy niedokładno
ś
ci mechaniczne zostan
ą
rozpoznane przez odpowiednie sensory i skompensowane przez zaawansowane przetwarzanie
informacji. Powoduje to znacz
ą
redukcj
ę
nakładów zwi
ą
zanych z rozwojem i wytwarzaniem
maszyn.
Mechatronika
stanowi tutaj podstaw
ę
zwi
ę
kszonej funkcjonalno
ś
ci i lepszej
produktywno
ś
ci.
Ponadto mechatronika w nowoczesnych koncepcjach budowy maszyn umo
ż
liwia racjonalizacj
ę
rozwi
ą
za
ń
automatyzacji przez zaawansowan
ą
decentralizacj
ę
(rozproszenie). Albo te
ż
na odwrót
– rozproszona inteligencja umo
ż
liwia indywidualne sterowanie komputerowe poszczególnych
zespołów. Zadania sterownicze nie musz
ą
ju
ż
by
ć
wykonywane przez nadrz
ę
dny układ
sterowania, lecz daj
ą
si
ę
realizowa
ć
bezpo
ś
rednio na miejscu przez inteligentne aktuatory.
Decentralizacja w automatyzacji przyczynia si
ę
tak
ż
e w znacznym stopniu do tego,
ż
e poprawia
si
ę
efektywno
ść
monta
ż
u i serwisu. Znacznie redukuje si
ę
równie
ż
zapotrzebowanie miejsca
w szafach sterowniczych i nakłady zwi
ą
zane z okablowaniem. Do sterowania takich rozwi
ą
za
ń
wystarczaj
ą
kable zasilania elektrycznego i magistrala. Inteligentne aktuatory
realizuj
ą
samodzielnie np. zadania pozycjonowania.
Cechy układów mechatronicznych
Zalety wyrobów mechatronicznych
Systemy mechatroniczne, w porównaniu z czysto mechanicznymi rozwi
ą
zaniami, maj
ą
cały
szereg zalet:
s
ą
one ta
ń
sze i l
ż
ejsze, poniewa
ż
cz
ęś
ci mechaniczne zostały zast
ą
pione ta
ń
sz
ą
elektronik
ą
(przykład: drukarka komputerowa),
s
ą
one niezawodne i bardziej u
ż
yteczne, poniewa
ż
s
ą
one przystosowane do
samonadzorowania, a nawet cz
ę
sto tak
ż
e do zdalnej diagnostyki (przykład: komputer
pokładowy samochodu),
s
ą
one dokładniejsze, poniewa
ż
uzyskuj
ą
precyzj
ę
nie w wyniku mechanicznej
stabilno
ś
ci, ale za pomoc
ą
elektronicznej techniki pomiarowej i regulacyjnej (przykład:
robot),
s
ą
one efektywniejsze w zu
ż
yciu energii, poniewa
ż
dzi
ę
ki wbudowanej „inteligencji”
mog
ą
pracowa
ć
w pobli
ż
u optymalnego stopnia działania (przykład: regulacja
ogrzewania),
s
ą
one dłu
ż
sze w u
ż
ytkowaniu, poniewa
ż
przez prost
ą
wymian
ę
oprogramowania mog
ą
one mie
ć
inne, lub nawet w pełni nowe własno
ś
ci (przykład: nowoczesna pralka),
tym samym s
ą
one równie
ż
przyjazne dla u
ż
ytkownika, a tak
ż
e odporne na bł
ę
dy
obsługi, poniewa
ż
wiele wska
ź
ników, pokr
ę
teł i d
ź
wigni zostało zast
ą
pionych kilkoma
klawiszami i monitorem komputerowym i w ten sposób system mo
ż
e si
ę
„broni
ć
” przed
bł
ę
dami obsługi (przykład: nowoczesna instalacja produkcyjna),
wreszcie jest wiele urz
ą
dze
ń
, do których
ż
e
ś
my si
ę
od dawna przyzwyczaili, a których bez
mechatroniki nie mo
ż
na sobie nawet wyobrazi
ć
(przykład: odtwarzacz wideo, ABS).
17
Mechatronika jako nowa, interdyscyplinarna dziedzina wiedzy in
ż
ynierskiej
i technologii ł
ą
czy w sobie elementy konwencjonalnych dyscyplin, takich jak
mechanika, elektronika i informatyka. Jest ona stosowana przede wszystkim tam,
gdzie przez zaawansowane (inteligentne) poł
ą
czenie poszczególnych dyscyplin
mo
ż
na uzyska
ć
znaczny wzrost całkowitej funkcjonalno
ś
ci.
W nowych, mechatronicznych wyrobach układy mechaniczne, czujniki, aktuatory
i mikrokomputery oraz odpowiednie oprogramowanie tworz
ą
działaj
ą
cy system
techniczny - system mechatroniczny.
Stopie
ń
integracji systemów mechatronicznych jest tak znaczny,
ż
e poszczególne
układy (podsystemy) bez udziału innych układów nie mog
ą
pracowa
ć
, a całkowit
ą
funkcjonalno
ść
mo
ż
na uzyska
ć
tylko przez idealne współdziałanie wszystkich
funkcji cz
ą
stkowych. I tak np. w obrabiarkach wysok
ą
dokładno
ść
obróbki mo
ż
na
ekonomicznie uzyska
ć
dopiero wtedy, gdy wszystkie niedokładno
ś
ci w układach
mechanicznych zostan
ą
rozpoznane przez odpowiednie czujniki i nast
ę
pnie
skorygowane przez zaawansowane przetwarzanie informacji. Dzi
ę
ki takim
działaniom mo
ż
na znacznie zredukowa
ć
nakłady zwi
ą
zane z rozwojem
i wytwarzaniem obrabiarek.
Mechatronika jest zatem podstaw
ą
dla rozwoju i produkcji nowych, w sposób
zaawansowany (inteligentny) sterowanych i regulowanych wyrobów, o wi
ę
kszej
funkcjonalno
ś
ci, wy
ż
szej niezawodno
ś
ci oraz bardziej ekonomicznych.
Mechatronika – nowa dziedzina wiedzy in
ż
ynierskiej
Mechatronika:
Mechatronika:
1969 r., firma Yaskava (Japonia):
⇒
⇒
⇒
⇒
Mechatronika = Mechanika + Elektronika
Lata 80. XX w., rozszerzenie definicji:
⇒
⇒
⇒
⇒
Mechatronika = Mechanika + Elektronika + Informatyka
Cało
ś
ciowe rozpatrywanie trzech dyscyplin:
⇒
⇒
⇒
⇒
Wykorzystanie potencjału mechatroniki!
Interdyscyplinarne post
ę
powanie i współdziałanie
ró
ż
nych składników:
⇒
⇒
⇒
⇒
uzyskanie funkcjonalno
ś
ci wyrobów
Mo
ż
liwa tylko realizacja systemowa:
Funkcja cz
ą
stkowa + funkcja cz
ą
stkowa + funkcja
cz
ą
stkowa = funkcja całkowita
Przykłady: roboty, obrabiarki, samoloty
Mechanika
Mechanika
Elektronika
Elektronika
Informatyka
Informatyka
Rozwój mechatroniki
18
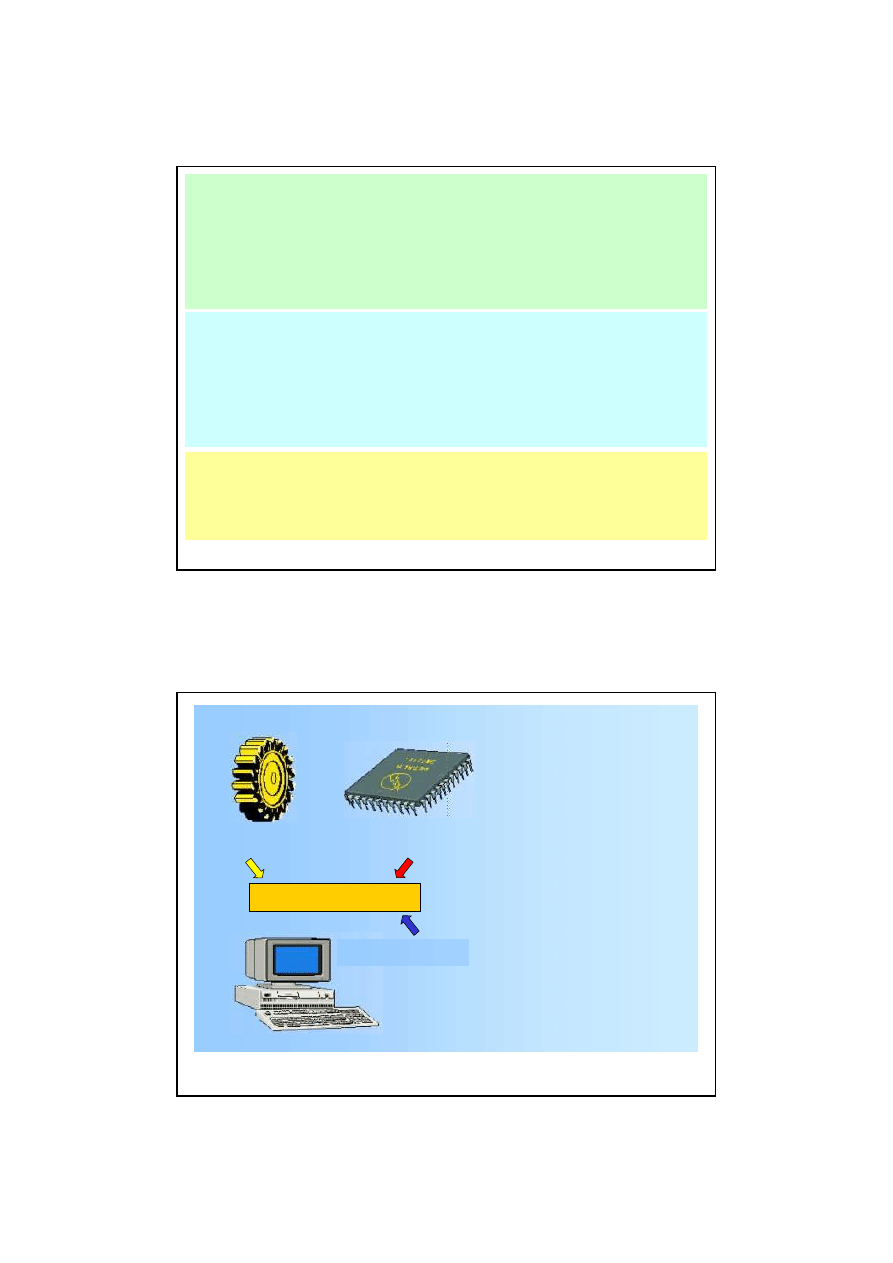
Kamera filmowa:
Przed 30. laty małoobrazkowa kamera filmowa była wył
ą
cznie wyrobem mechaniki precyzyjnej
z układami optycznymi. Z tego okresu w obecnych kamerach pozostała obudowa, soczewki
i migawka. Natomiast nowoczesna kamera zawiera czujniki, które okre
ś
laj
ą
stopie
ń
o
ś
wietlenia
obiektu, ostro
ść
obrazu i czuło
ść
filmu. Zawiera ona tak
ż
e aktuatory, a zatem elektromagnesy
i silniki, które transportuj
ą
film, uruchamiaj
ą
przysłon
ę
i migawk
ę
, nastawiaj
ą
ostro
ść
i ogniskow
ą
. Kamera taka zawiera procesor, który wg zapami
ę
tanego programu steruje
funkcjami tego urz
ą
dzenia. Nast
ą
pił tak
ż
e dalszy rozwój kamer przez zast
ą
pienie błony filmowej
czujnikiem obrazu i pami
ę
ci
ą
elektroniczn
ą
.
Spalinowy silnik wysokopr
ęż
ny (Diesel):
Nowoczesne silniki wysokopr
ęż
ne pojazdów s
ą
zaawansowanymi wyrobami budowy maszyn.
Równie
ż
w nich znalazła zastosowanie mechatronika: wtrysk paliwa i doładowanie s
ą
obecnie
sterowane i regulowane przez elektroniczny układ zarz
ą
dzania silnikiem. Do tego celu s
ą
stosowane: czujniki, aktuatory, procesory i oprogramowanie. Dzi
ę
ki temu silniki tych generacji s
ą
tak efektywne, ekonomiczne i przyjazne dla
ś
rodowiska jak nigdy wcze
ś
niej. Ponadto w celu
dopasowania do warunków pracy w specyficznych zastosowaniach w wielu przypadkach
wystarcza prosta modyfikacja oprogramowania.
Wyroby mechatroniczne odznaczaj
ą
si
ę
tym,
ż
e w maszynach i urz
ą
dzeniach istotne funkcje nie
s
ą
ju
ż
realizowane konwencjonalnie w sposób mechaniczny, lecz ze wspomaganiem
elektronicznym (sprz
ę
tu i oprogramowania). W wyniku post
ę
pów w rozwoju mikroelektroniki takie
nowe rozwi
ą
zania wyrobów s
ą
ta
ń
sze, a przede wszystkim o wiele efektywniejsze i łatwiejsze
w dopasowaniu do potrzeb ni
ż
dotychczasowe.
Przykłady wyrobów mechatronicznych
Ró
ż
nego rodzaju systemy techniczne mog
ą
by
ć
układami
mechatronicznymi. Maj
ą
one ogólnie nast
ę
puj
ą
ce cechy:
• wysoka zło
ż
ono
ść
,
• wysoki stopie
ń
integracji składników mechanicznych, elektrycznych
i przetwarzania informacji,
• optymalizacja systemu jako cało
ś
ci.
W wyrobach mechatronicznych stopie
ń
powi
ą
zania poszczególnych
składników jest tak wysoki,
ż
e ich optymalne projektowanie wymaga
realizacji równoległego działania dla wszystkich składników, przy czym
system od pocz
ą
tku musi by
ć
rozpatrywany jako funkcjonalnie
i przestrzennie zintegrowany układ całkowity.
Podstawowe zasady mechatroniki:
• optymalizacja cało
ś
ci zamiast optymalizacji poszczególnych elementów,
• przestrzenna integracja składników,
• wielofunkcjonalno
ść
zamiast monofunkcjonalno
ś
ci,
• rozpatrywanie systemowe zamiast liniowego sposobu post
ę
powania,
• zastosowanie symulacji.
Własno
ś
ci układów mechatronicznych
19
Ogólnie obowi
ą
zuj
ą
c
ą
zasad
ą
panuj
ą
c
ą
na rynku jest to,
ż
e wyroby musz
ą
by
ć
jednoznacznie
ukierunkowane na wymagania (potrzeby) klientów. Dotyczy to np. trwało
ś
ci (
ż
ywotno
ś
ci) wyrobów,
a tak
ż
e takich ich cech jak małe nakłady na ich piel
ę
gnacj
ę
, cicha praca, szybko
ść
, a tak
ż
e
wielofunkcyjno
ść
dzi
ę
ki integracji dodatkowych funkcji.
Jednym z istotnych zada
ń
realizowanych w wielu zło
ż
onych wyrobach jest ci
ą
głe nadzorowanie stanu
(ang. Condition Monitoring) ich istotnych zespołów. Dzi
ę
ki integracji w takich zespołach czujników
uzyskuje si
ę
informacje dotycz
ą
ce np. temperatury lub zu
ż
ycia. Na tej podstawie mo
ż
na wcze
ś
nie
rozpoznawa
ć
stany przedawaryjne, zwi
ę
ksza
ć
niezawodno
ść
wyrobów, a tak
ż
e znacznie wydłu
ż
a
ć
okresy przegl
ą
dów serwisowych. I tak np. w elektrowniach wiatrowych czynnikiem rozstrzygaj
ą
cym o ich
dyspozycyjno
ś
ci i rentowno
ś
ci, a tak
ż
e warunkiem ich ubezpieczenia jest zastosowanie nadzorowania
stanu w trybie on-line.
W budowie maszyn tak
ż
e obserwuje si
ę
rosn
ą
ce zastosowanie układów nadzorowania stanu w trybie
on-line. Jednak ze wzgl
ę
du na mniejsze serie produkcyjne, a tak
ż
e wi
ę
ksz
ą
zło
ż
ono
ść
maszyn proces
ten przebiega wolniej. Wraz z rozwojem mechtronicznego podej
ś
cia w budowie maszyn tak
ż
e nale
ż
y
oczekiwa
ć
istotnych zmian.
Mechatroniki nie nale
ż
y jednak rozpatrywa
ć
w sposób wyizolowany lecz systemowy, co szczególnie
wyra
ź
nie widocznie jest na przykładzie budowy maszyn. Je
ż
eli dotychczas były to poszczególne
składniki, to obecnie spotyka si
ę
ju
ż
okre
ś
lone moduły, np. elektrowrzeciona obrabiarek z bezpo
ś
rednim
nap
ę
dem, układami pomiarowymi oraz zintegrowanym układem nadzorowania. Innymi takimi
rozwi
ą
zaniami s
ą
moduły zespołów posuwu z prowadnicami tocznymi i nap
ę
dami z bezpo
ś
rednimi
silnikami liniowymi. Ponadto moduły te, w zale
ż
no
ś
ci od wymaga
ń
klientów, mog
ą
zawiera
ć
dodatkowe
funkcje, takie jak np. magnetyczne przyrostowe układy pomiarowe, osłony, zespół doprowadzenia
energii, tłumik i hamulce pneumatyczne. Zatem klient uzyskuje bardzo zwart
ą
i kompletnie wyposa
ż
on
ą
jednostk
ę
, za pomoc
ą
której mo
ż
na realizowa
ć
dokładne i powtarzalne ruchy. Wielofunkcjonalno
ść
modułów jest podstaw
ą
sukcesu.
Wa
ż
nym warunkiem rosn
ą
cej integracji mechatronicznych modułów w budowie maszyn jest
zacie
ś
nienie współpracy klientów (przedsi
ę
biorstw budowy maszyn) z dostawcami podzespołów.
Cechy wyrobów mechatronicznych
Maszyny, urz
ą
dzenia i instalacje mechatroniczne
charakteryzuj
ą
si
ę
:
multifunkcjonalno
ś
ci
ą
, oznaczaj
ą
c
ą
łatwo
ść
realizacji ró
ż
nych
zada
ń
przez jedno urz
ą
dzenie, np. przez zmian
ę
oprogramowania;
inteligencj
ą
, oznaczaj
ą
c
ą
mo
ż
liwo
ść
podejmowania decyzji
komunikacji z otoczeniem;
elastyczno
ś
ci
ą
, czyli łatwo
ś
ci
ą
modyfikacji konstrukcji na
etapie projektowania, produkcji oraz eksploatacji maszyny czy
urz
ą
dzenia, np. przez zastosowanie konstrukcji modułowej;
mo
ż
liwo
ś
ci
ą
niewidocznego dla operatora sposobu działania,
co wymaga zastosowania interfejsu u
ż
ytkownika dla
komunikowania si
ę
z operatorem;
zale
ż
no
ś
ci
ą
od wymaga
ń
rynkowych i mo
ż
liwo
ś
ci
technologicznych wykonania.
Cechy systemów mechatronicznych
20
Porównanie własno
ś
ci systemów mechatronicznych
z konwencjonalnymi układami mechanicznymi
Dzi
ę
ki funkcjonalnej integracji urz
ą
dze
ń
elektrycznych, elektroniki i informatyki w układzie
mechanicznym systemy ze składnikami mechatronicznymi, w porównaniu z układami konwencjonalnej
budowy wyrobów (np. maszyn), maj
ą
zmienione własno
ś
ci. Te własno
ś
ci mo
ż
na podzieli
ć
na:
strukturalne wzgl. geometryczne i funkcjonalne. Własno
ś
ci funkcjonalne mo
ż
na dalej podzieli
ć
na
poprawiaj
ą
ce funkcje oraz rozszerzaj
ą
ce funkcje.
Strukturalne wzgl. geometryczne własno
ś
ci uzyskuje si
ę
z tego,
ż
e cz
ą
stkowe funkcje systemu ze
składnikami mechatronicznymi s
ą
realizowane na ró
ż
nych poziomach fizycznych (heterogeniczno
ść
). Ta
heterogeniczno
ść
prowadzi do wi
ę
kszej liczby poł
ą
czonych ze sob
ą
elementów i tym samym wi
ę
kszej
zło
ż
ono
ś
ci struktury wyrobu. Pomimo tej bardziej zło
ż
onej budowy w takim systemie, przy porównywalnej
liczbie funkcji, uzyskuje si
ę
zmniejszenie ilo
ś
ci mechanicznych elementów składowych, a ro
ś
nie liczba
wielofunkcyjnych składników. Efektem tego jest redukcja obj
ę
to
ś
ci systemu i jego ci
ęż
aru.
Strukturalne / geometryczne
- heterogeniczne,
- bardziej zło
ż
one,
- mniej mechanicznych elementów,
- wielofunkcyjne składniki,
- mniejsze gabaryty,
- l
ż
ejsze.
poprawiaj
ą
ce funkcje:
- zwi
ę
kszenie parametrów
funkcjonalnych (np.
dokładno
ść
,
przyspieszenie itp.),
- automatyzacja funkcji,
- przyjazno
ść
dla
u
ż
ytkownika.
rozszerzaj
ą
ce funkcje:
- okre
ś
lanie stanów
bezpo
ś
rednio
niemierzalnych,
- wy
ż
sza niezawodno
ść
systemu,
- elastyczne dopasowanie
do wymaga
ń
.
Funkcjonalne
Własno
ś
ci funkcyjne systemów mechatronicznych, w porównaniu z konwencjonalnymi układami
mechanicznymi, zmieniaj
ą
si
ę
przede wszystkim dlatego,
ż
e pierwotne mechaniczne zasady rozwi
ą
za
ń
zostały
uzupełnione lub zast
ą
pione przez poł
ą
czenie zespołów elektrycznych, elektronicznych i informatycznych.
Funkcje systemu mog
ą
by
ć
przy tym realizowane albo przez sprz
ę
t albo oprogramowanie. Dzi
ę
ki temu
poprawiaj
ą
si
ę
funkcje systemu lub s
ą
generowane nowe. S
ą
one w du
ż
ej mierze okre
ś
lone przez elementy
niematerialne takie jak oprogramowanie. Oprogramowanie mo
ż
e by
ć
nawet traktowane jako element maszyny.
Dzi
ę
ki temu otwieraj
ą
si
ę
znacznie bardziej elastyczne mo
ż
liwo
ś
ci kształtowania systemów mechatronicznych.
Przy poprawie funkcji wymagaj
ą
ce cz
ę
sto znacznych nakładów lub niewystarczaj
ą
ce rozwi
ą
zania
mechaniczne s
ą
wspomagane lub zast
ę
powane przez zastosowanie elektroniki i informatyki. Dzi
ę
ki temu
polepszaj
ą
si
ę
graniczne warto
ś
ci parametrów i rozszerza obszar pracy. I tak np. wysok
ą
dokładno
ść
pozycjonowania mo
ż
na uzyska
ć
nie za pomoc
ą
samej precyzji mechanicznej, ale przez regulacyjne
porównywanie warto
ś
ci rzeczywistej z warto
ś
ci
ą
zadan
ą
w obwodzie sprz
ęż
enia zwrotnego. Zastosowanie
elektroniki i informatyki umo
ż
liwia równie
ż
wy
ż
szy stopie
ń
automatyzacji funkcji wyrobu (np. autofokus
w aparacie fotograficznym). Równocze
ś
nie wyst
ę
puj
ą
ca zwi
ę
kszona zło
ż
ono
ść
funkcyjna jest ułatwiona przez
prosto obsługiwane sterowanie systemu lub staje si
ę
przejrzysta dzi
ę
ki automatyzacji i przyjazno
ś
ci obsługi.
Ponadto mechatronika umo
ż
liwia rozszerzenie funkcyjne systemu, które bez mechatroniki nie byłoby
mo
ż
liwe. Celowe odpytywanie o stany systemu i nast
ę
pnie przetwarzanie tych wielko
ś
ci mierzonych umo
ż
liwia
okre
ś
lanie bezpo
ś
rednio niemierzalnych wielko
ś
ci w systemie. Za pomoc
ą
regulacji mo
ż
na na te wielko
ś
ci
w sposób celowy oddziaływa
ć
. Przykładami tego s
ą
takie zmienne zale
ż
ne od czasu jak temperatura, lub
parametry takie jak sztywno
ść
. Dzi
ę
ki zastosowaniu elektroniki i informatyki daje si
ę
równie
ż
wygenerowa
ć
funkcje nadzorowania z wczesnym rozpoznawaniem bł
ę
dów i natychmiastow
ą
reakcj
ą
w postaci
przeciwdziałania. Wła
ś
nie w coraz bardziej zło
ż
onych strukturach zapewniaj
ą
one wysok
ą
niezawodno
ść
systemu. Elastyczne i szybkie dopasowanie do zmieniaj
ą
cych si
ę
wymaga
ń
jest mo
ż
liwe dzi
ę
ki temu,
ż
e cz
ęść
funkcji systemu jest programowalna i tym samym szybsza i prostsza do zmiany. W ju
ż
skonfigurowanych
własno
ś
ciach systemu mo
ż
e si
ę
to odbywa
ć
przez zastosowanie ró
ż
norodnych modułów programowych, które
wymagane funkcje doł
ą
czaj
ą
lub niepo
żą
dane funkcje blokuj
ą
.
Własno
ś
ci systemów mechatronicznych
21
Innowacyjne produkty powstaj
ą
najcz
ęś
ciej przez zastosowanie wiedzy
i do
ś
wiadcze
ń
(ang. Know How) z ró
ż
nych obszarów specjalno
ś
ci. Wła
ś
nie
przykładem takiej przekrojowej dziedziny jest mechatronika. Rozwój
mechatroniki spowodował,
ż
e stała si
ę
ona kluczow
ą
technologi
ą
XXI w.
Przykłady tego, na co pozwala mechatronika mo
ż
na znale
źć
prawie wsz
ę
dzie.
S
ą
to autopiloty w samolotach, przekładnie elektroniczne, składniki urz
ą
dze
ń
Hi-Fi lub aktywne zawieszenia w pojazdach. Du
ż
e mo
ż
liwo
ś
ci wi
ążą
si
ę
tak
ż
e
z rozwojem zastosowa
ń
robotów.
Jedn
ą
z cech nowoczesnych urz
ą
dze
ń
, pojazdów, maszyn, instalacji i
ś
rodków
wytwarzania jest to,
ż
e zawieraj
ą
one równocze
ś
nie składniki mechaniczne,
elektroniczne i programowe. Takie mechatroniczne układy wyst
ę
puj
ą
ce np.
w odtwarzaczach CD, drukarkach atramentowych, czy systemach
bezpiecze
ń
stwa samochodów stały si
ę
cz
ęś
ci
ą
codziennego
ż
ycia. Tak
ż
e
roboty czy zautomatyzowane obrabiarki s
ą
zaliczane do obszaru mechatroniki.
Ta szeroka paleta obiektów mechatronicznych w przyszło
ś
ci znacznie si
ę
jeszcze rozszerzy. I tak np. w technice medycznej dzi
ę
ki małym, lekkim
sterowanym sensorycznie robotom b
ę
d
ą
mo
ż
liwe operacje z minimaln
ą
ingerencj
ą
. W samochodach mechaniczne układy kierownicze i hamulcowe
zostan
ą
zast
ą
pione zespołami mechatronicznymi, co zapewni wi
ę
ksz
ą
funkcjonalno
ść
i wzrost bezpiecze
ń
stwa.
Rozwój i opłacalna produkcja takich nowych i innowacyjnych wyrobów ma
równie
ż
istotne znaczenie dla zapewnienia konkurencyjno
ś
ci przedsi
ę
biorstw.
Typowe działanie mechatroniczne wi
ąż
e si
ę
z niekonwencjonalnym,
cało
ś
ciowym i wielostronnym podej
ś
ciem w realizacji projektów dotycz
ą
cych
rozwoju wyrobów.
Mechatroniczne wyroby
Składniki mechatroniczne upraszczaj
ą
konstrukcj
ę
(budow
ę
) wyrobów. Je
ż
eli stosuje si
ę
je w produkcji, to
uzyskuje
si
ę
szybsze
uruchamianie
oraz
zmniejszenie
spraw
koordynacyjnych
dotycz
ą
cych
oprogramowania.
Konwencjonalna budowa maszyn rozpatruje składniki mechaniczne, elektryczne i oprogramowanie jako oddzielne
jednostki. Do takiego podej
ś
cia s
ą
tak
ż
e dostosowane struktury pracowników w działach konstrukcji mechanicznej
i konstrukcji elektrycznej (elektronicznej) oraz opracowywaniu oprogramowania. Ka
ż
dy konstruktor opracowuje
konstrukcj
ę
cz
ęś
ci (zespołów) maszyny w projektowaniu poziomym. Wydaje si
ę
to sensowne, je
ż
eli przyjmie si
ę
,
ż
e
mechanik-konstruktor buduje maszyny, a projektowanie układów elektryczno-elektronicznych lub opracowywanie
oprogramowania nie nale
żą
do zakresu jego prac. Projektowanie poziome ma jednak wiele wad. Nale
żą
do nich
m.in. problemy dotycz
ą
ce uzgodnie
ń
mi
ę
dzy konstruktorami i technologami, mo
ż
liwo
ść
realizacji rozwi
ą
za
ń
, a tak
ż
e
okre
ś
lenie nakładów. Ponadto wskutek poziomego projektowania nie ma wspomagania w zakresie ponownego
zastosowania modułów, gdy
ż
cz
ą
stkowe rozwi
ą
zania takie jak mechaniczny Layout, planowanie układów
elektryczno-elektronicznych oraz oprogramowanie s
ą
realizowane w ró
ż
nych systemach. Projektowanie pionowe,
w którym cz
ęś
ci (zespoły) maszyny rozpatruje si
ę
w sposób przelotowy dla wszystkich dyscyplin daje wiele korzy
ś
ci.
Jednostki mechatroniczne s
ą
konsekwencj
ą
pionowego projektowania, które powinno słu
ż
y
ć
przede wszystkim do
tego,
ż
eby w coraz bardziej zło
ż
onych funkcjach maszyn upro
ś
ci
ć
konstrukcj
ę
tych maszyn. Im prostsza jest
konstrukcja, tym mniejsze nakłady i bł
ę
dy powstaj
ą
w jej budowie, co poprawia konkurencyjno
ść
przedsi
ę
biorstwa.
Cech
ą
układów (wyrobów) mechatronicznych jest najcz
ęś
ciej przestrzenna i przede wszystkim funkcjonalna
integracja modułów, w których czujniki mierz
ą
sygnały, procesory przetwarzaj
ą
informacje, a aktuatory (zespoły
wykonawcze) elektryczne, hydrauliczne lub pneumatyczne s
ą
stosowane po to, aby oddziaływa
ć
na układ
mechaniczny.
Elementy
mechatroniczne
pochodz
ą
obecnie cz
ę
sto od znacz
ą
cych dostawców nap
ę
dów i składników
mechanicznych. Wynika to z rozwoju, w którym cz
ęś
ci mechaniczne i nap
ę
dy tworz
ą
platform
ę
, do której wstawiane
jest coraz wi
ę
cej elektroniki i oprogramowania, a zatem funkcjonalno
ś
ci. Silniki, falowniki i przekładnie ju
ż
od
dłu
ż
szego czasu stanowi
ą
całkowite jednostki w budowie maszyn. Zainstalowane w takiej jednostce czujniki słu
żą
do wła
ś
ciwego sterowania mechanicznymi funkcjami tej jednostki. Na tej bazie integrowane jest sterowanie prac
ą
maszyn za pomoc
ą
sterowników komputerowych, np. sterowników swobodnie programowalnych PLC (ang.
Programmable Logical Controller), czy układów sterowania numerycznego CNC (ang. Computerized Numerical
Control).
Mechatronika w budowie maszyn
22
Zastosowanie elementów i układów mechatronicznych wi
ąż
e si
ę
w praktyce z konieczno
ś
ci
ą
zmiany paradygmatów,
np. w budowie maszyn. Powody, dla których rozpatruje si
ę
zastosowanie składników mechatronicznych
w maszynach i innych wyrobach nie zawsze były widoczne. Padaj
ą
argumenty,
ż
e równie
ż
bez mechatroniki były i s
ą
budowane niezawodne maszyny. Wytwórcy maszyn ch
ę
tnie przenosz
ą
swoje do
ś
wiadczenia do praktyki, aby szybko
i efektywnie modyfikowa
ć
istniej
ą
ce projekty (rozwi
ą
zania) i w ten sposób budowa
ć
nowe, niezawodne maszyny.
Zmiana na elementy mechatroniczne spowodowałaby zwi
ę
kszenie ceny maszyn, transfer wiedzy i do
ś
wiadcze
ń
(Know-how) do wytwórców takich elementów i wymiany z producentami maszyn.
Takie obawy s
ą
cz
ę
sto podnoszone jako argumenty przeciwko stosowaniu mechatroniki. Jednak zastosowania
elementów mechatronicznych nie da si
ę
powstrzyma
ć
, poniewa
ż
coraz cz
ęś
ciej przewa
ż
aj
ą
korzy
ś
ci. Maszyny dzi
ę
ki
mechatronice s
ą
szybciej konstruowane, szybciej wytwarzane oraz s
ą
one prostsze. Koncepcja mechatronicznej
budowy modułowej obejmuje równie
ż
przestrzenne zale
ż
no
ś
ci w maszynie. S
ą
to zalety, które niweluj
ą
wy
ż
sze ceny
w porównaniu z konwencjonalnymi składnikami. Równie
ż
producenci maszyn odnosz
ą
korzy
ś
ci z krótszych cykli
innowacyjnych elementów mechatronicznych. Tak
ż
e w przyszło
ś
ci maszyny nie b
ę
d
ą
si
ę
składały wył
ą
cznie
z elementów mechatronicznych. We wszystkich obszarach zastosowa
ń
konieczna jest analiza zalet i wad, które
wnosi zastosowanie mechatroniki. Wcze
ś
niej budowa maszyn była okre
ś
lona aspektami mechanicznymi.
Przeprowadzone niedawno badania wykazały,
ż
e oprogramowanie stanowi ju
ż
połow
ę
funkcjonalno
ś
ci i kosztów w
budowie maszyn. Ten udział stale wzrasta. W niektórych przedsi
ę
biorstwach budowy maszyn działy opracowuj
ą
ce
oprogramowanie s
ą
ju
ż
wi
ę
ksze ni
ż
działy konstrukcji mechanicznych. Niektórzy producenci maszyn we własnym
zakresie wykonuj
ą
tak
ż
e układy sterowania,
ż
eby nie mo
ż
na ich było skopiowa
ć
.
Interesuj
ą
c
ą
alternatyw
ą
dla tworzenia w przedsi
ę
biorstwie własnych działów opracowywania oprogramowania jest
zastosowanie elementów mechatronicznych. Obejmuj
ą
one bowiem zło
ż
one funkcje cz
ą
stkowe, które mo
ż
na kupi
ć
w
gotowej postaci. Zestawienie i synchronizacja pracy takich elementów jest prostsza ni
ż
samodzielna realizacja
zło
ż
onej funkcji maszyny. Mo
ż
na kupi
ć
specjalny Know-how i nie trzeba go samemu tworzy
ć
. Konfiguracja
i parametryzacja poszczególnych funkcji dla realizacji procesów w maszynie i tym samym Know-how dotycz
ą
cy
procesu, pozostaje u producenta maszyny.
Porównuj
ą
c to z obecnym sposobem post
ę
powania, np. przy zastosowaniu nap
ę
dów do pozycjonowania, nakłady
nie zmieniaj
ą
si
ę
zbyt wiele. Falownik, silnik i przekładnia s
ą
cz
ę
sto dostarczane od jednego oferenta, co okre
ś
la cały
układ. Mechatronika integruje te składniki w jeden moduł, zamiast umieszczania elektroniki w szafie sterowniczej.
Dzi
ę
ki temu uzyskuje si
ę
zwarte maszyny. To co jeszcze zostaje, to wł
ą
czenie elementów mechatronicznych do
zasilania elektrycznego i informacji steruj
ą
cych.
Mechatronika w budowie maszyn
istniej
ą
proste elementy mechatroniczne, które s
ą
wbudowywane mechanicznie w maszyn
ę
i musz
ą
by
ć
one zasilane energi
ą
elektryczn
ą
. Za pomoc
ą
swoich czujników i programów mog
ą
one realizowa
ć
swoje procesy. Aby w maszynie uzyska
ć
wi
ę
ksz
ą
elastyczno
ść
, sensowne jest
jednak poł
ą
czenie ze sob
ą
elementów mechatronicznych tak
ż
e w zakresie wymiany danych.
Do tego celu słu
żą
sieci komunikacyjne takie jak np. Profibus, Interbus, Profinet czy Ethernet.
System sieciowy słu
ż
y do transmisji nowego oprogramowania, zmienionych zestawów
parametrów, wskazywania statusu i bł
ę
dów lub synchronizacji ruchów. Konstruktor maszyny
mo
ż
e obecnie u producentów układów mechatronicznych cz
ę
sto wybra
ć
rodzaj interfejsu do
wł
ą
czenia w sie
ć
. Wa
ż
niejsze z takich interfejsów (otwarte rozwi
ą
zania sieci komunikacyjnych)
wyst
ę
puj
ą
w wielu elementach mechatronicznych dost
ę
pnych na rynku. Takie sieci wymagaj
ą
instalacji magistrali (komunikacja przewodowa).
Jednak w przyszło
ś
ci coraz wi
ę
ksz
ą
rol
ę
wła
ś
nie w elementach mechatronicznych b
ę
d
ą
odgrywały bezprzewodowe technologie komunikacyjne, a zatem poł
ą
czenia z wykorzystaniem
fal radiowych lub promieni podczerwonych. Ju
ż
obecnie wiele firm oferuje elementy
mechatroniczne, umo
ż
liwiaj
ą
ce ich wł
ą
czenie w sie
ć
za pomoc
ą
bezprzewodowej technologii.
Dzi
ę
ki temu maszyny mog
ą
by
ć
jeszcze prostsze, je
ż
eli elementy mechatroniczne b
ę
d
ą
wymagały jedynie zasilania elektrycznego oraz tego,
ż
eby były one umieszczone
w
odpowiednim
miejscu.
Przez
zastosowanie
elementów
mechatronicznych
oraz
mechatronicznej koncepcji budowy łatwiej b
ę
dzie opanowa
ć
coraz wi
ę
ksz
ą
zło
ż
ono
ść
produkowanych maszyn. Zło
ż
one procesy i funkcje musz
ą
by
ć
tak dalece zamkni
ę
te wewn
ą
trz
jednostek mechatronicznych,
ż
e konstruktor na podstawie ich opisu mo
ż
e je w prosty sposób
wykorzystywa
ć
.
Przepisem na sukces mechatroniki mo
ż
e by
ć
uproszczenie budowy maszyn, poniewa
ż
wła
ś
nie
tutaj jest obecnie zawarty najwi
ę
kszy potencjał racjonalizacyjny.
Mechatronika w budowie maszyn
23
Elastyczno
ść
takich maszyn jak np. maszyny do pakowania, szczególnie w przyszło
ś
ci b
ę
dzie
miała co najmniej takie znaczenie jak szybko
ść
ich działania. Czasy przezbrajania maszyn musz
ą
by
ć
zredukowane, a maszyny musz
ą
mie
ć
mo
ż
liwo
ść
produkcji (pakowania) ró
ż
nych wyrobów.
Obecnie w znacznej cz
ęś
ci maszyn do pakowania s
ą
stosowane tzw. wały królewskie, które
sprz
ę
gaj
ą
wszystkie ruchome zespoły maszyny za pomoc
ą
mechanicznych składników ze
zło
ż
onymi funkcjami ruchu. Takie skomplikowane elementy i zespoły mechaniczne jak krzywki,
sprz
ę
gła i hamulce oraz przekładnie zapewniaj
ą
funkcjonalno
ść
maszyny. W wi
ę
kszo
ś
ci
przypadków do budowy takich maszyn wymagane s
ą
specjalnie dla nich wykonane cz
ęś
ci
mechaniczne. Takie maszyny s
ą
sztywne w mo
ż
liwo
ś
ciach swoich zastosowa
ń
i ju
ż
po krótkim
czasie staj
ą
si
ę
one technicznie przestarzałe.
I tak np. w nowoczesnych maszynach p
ą
kuj
ą
cych trzeciej generacji zamiast krzywek i sprz
ę
gieł
stosuje si
ę
serwonap
ę
dy. Taki ”wirtualny“ wał królewski zapewnia synchronizacj
ę
poszczególnych
ruchomych zespołów (osi) maszyny. Dowolnie synchronizowane taktowo i k
ą
towo ruchy s
ą
(zadawane) generowane przez centralny układ sterowania. Równie
ż
nieplanowane stany maszyny,
takie jak np. sytuacje zatrzymania i stopu awaryjnego oraz ruchy inicjuj
ą
ce mo
ż
na realizowa
ć
w sposób zsynchronizowany k
ą
towo. Dynamiczne zmiany materiału opakowania lub pakowanych
wyrobów, np.
ś
ciskanie wyrobów lub odkształcenia materiału p
ą
kuj
ą
cego, mog
ą
by
ć
okre
ś
lane
podczas pracy maszyny za pomoc
ą
czujników, a ich skutki eliminowane w przebiegach ruchów.
Ponadto na rynku wymaga si
ę
maszyn bardziej przyjaznych w obsłudze.
Tak
ż
e w tym zakresie zastosowania urz
ą
dze
ń
elektronicznych otwieraj
ą
si
ę
nowe mo
ż
liwo
ś
ci. I tak
np. w przypadku zakłóce
ń
podczas pracy maszyn mo
ż
na im szybko ponownie przywróci
ć
zdolno
ść
do działania dzi
ę
ki temu,
ż
e ich oparte na PC układy sterowania w trybie dialogowym informuj
ą
operatora o wewn
ę
trznych stanach. Wspomagaj
ą
one zarówno działania podczas ustawiania
parametrów maszyny jak i przy diagnozowaniu bł
ę
dnych stanów, przyczyniaj
ą
c si
ę
w ten sposób do
maksymalnej dyspozycyjno
ś
ci maszyny. Natomiast za pomoc
ą
Internetu istnieje tak
ż
e mo
ż
liwo
ść
zdalnej diagnostyki.
Zastosowanie mechatroniki w budowie maszyn
Ogromna wi
ę
kszo
ść
produkowanych obecnie mikroprocesorów nie znajduje zastosowania
w komputerach, ale stanowi cz
ęść
innych urz
ą
dze
ń
technicznych, takich jak samochody,
samoloty, domy, układy sterowania maszyn, satelity, telefony komórkowe, pralki, automaty do
gry czy kamery. S
ą
to głównie mikrosterowniki (mikrokontrolery). Szacuje si
ę
,
ż
e w 2000 r.
wyprodukowano około 150 mln mikroprocesorów do komputerów i ponad 7 mld
mikrokontrolerów. Mikrokontrolery stanowiły wi
ę
c ponad 90% wszystkich procesorów. Temu
fascynuj
ą
cemu rozwojowi techniki mikroprocesorowej towarzyszy równocze
ś
nie wi
ę
ksza
wydajno
ść
, miniaturyzacja i dyspozycyjno
ść
innych komponentów do konstrukcji urz
ą
dze
ń
mechatronicznych: silników, przekładni, baterii, poł
ą
cze
ń
, sensorów itp.
Obserwujemy coraz wi
ę
ksz
ą
„mechatronizacj
ę
” konwencjonalnych systemów technicznych.
Samoloty, statki i satelity od dawna maj
ą
ju
ż
autopiloty. W samochodach osobowych pracuje si
ę
intensywnie nad wspomaganiem zmysłów kierowcy w krytycznych dla niego sytuacjach.
Oznacza to,
ż
e samochody za kilka lat mog
ą
sta
ć
si
ę
robotami mobilnymi. Równie
ż
w tym
kierunku rozwijaj
ą
si
ę
urz
ą
dzenia techniki procesowej i technika domowa. Maszyny, urz
ą
dzenia,
aparaty i instalacje spostrzegaj
ą
swoje otoczenie, maj
ą
elastyczny „magazyn sposobów
zachowania”, mog
ą
si
ę
dopasowywa
ć
do zmieniaj
ą
cych si
ę
warunków otoczenia, podejmuj
ą
decyzje na podstawie kilku opcji działania i na koniec wykonuj
ą
działanie.
Główne obszary badawcze mechatroniki mo
ż
na podzieli
ć
na dwie grupy: (1) badania
ukierunkowane na produkt mechatroniczny i (2) badania zorientowane na proces
projektowania i wytwarzania produktów mechatronicznych. W
ś
ród tych drugich niezwykle
wa
ż
ny staje si
ę
rozwój interdyscyplinarnego podej
ś
cia do projektowania, cz
ę
sto po prostu
uto
ż
samianego z mechatronik
ą
czy projektowaniem mechatronicznym. Nie jest to zadanie łatwe.
Próby osi
ą
gni
ę
cia wi
ę
kszej integracji w poprzek dyscyplin prowadz
ą
bowiem cz
ę
sto do rosn
ą
cej
rozbie
ż
no
ś
ci metod i narz
ę
dzi.
Rozwój mechatroniki
24
Dotychczasowe, specyficzne metody projektowania w mechanice, automatyce, elektronice
i informatyce opieraj
ą
si
ę
na specyficznym dla dziedziny
ś
wiecie poj
ęć
, na specyficznych
do
ś
wiadczeniach nabytych przez dziesi
ą
tki lat oraz na specyficznych metodach i
ś
rodkach
opisu. Doprowadziło to w wielu dziedzinach do specyficznego sposobu my
ś
lenia
konstruktorów, a w praktyce przemysłowej do odpowiedniej funkcjonalnej struktury
organizacyjnej. Wychodz
ą
c z tej struktury, w praktyce przemysłowej cz
ę
sto próbuje si
ę
za
pomoc
ą
podobnego sposobu my
ś
lenia i takiej samej struktury organizacyjnej rozwija
ć
urz
ą
dzenia mechatroniczne. Konstruktorzy jednej z dziedzin okre
ś
laj
ą
w znacznym stopniu
sposób post
ę
powania i rozdzielaj
ą
konieczne, ze swego punktu widzenia, zadania
i problemy na grupy konstruktorów z innych dziedzin, bez wczesnego i integracyjnego
uwzgl
ę
dnienia mo
ż
liwo
ś
ci innych dyscyplin fachowych. Jest to mentalno
ść
typu „ja”.
Wynikiem takiego post
ę
powania s
ą
produkty optymalizowane cz
ęś
ciowo, powstaj
ą
ce przez
ż
mudne, czasochłonne i kosztowne dochodzenie do rozwi
ą
zania ko
ń
cowego. Nie
wykorzystuje si
ę
potencjału koncepcji systemowej, ukazuj
ą
cej korzy
ś
ci pozadyscyplinowe.
Próby wczesnego modelowania urz
ą
dzenia mechatronicznego skazywane s
ą
na
niepowodzenie cz
ę
sto z powodu braku sformalizowanego opisu lub braku
ś
rodków opisu
wykraczaj
ą
cych poza dan
ą
dyscyplin
ę
. A urz
ą
dzenia mechatroniczne staj
ą
si
ę
coraz
bardziej zło
ż
one. Ich dynamiczne zachowanie bierze si
ę
z wzajemnego powi
ą
zania
wyspecjalizowanych komponentów: mechaniki, hydrauliki, pneumatyki, elektryki, elektroniki,
automatyki i informatyki. Je
ż
eli do projektowania takiego urz
ą
dzenia podchodzi si
ę
w sposób tradycyjny, sekwencyjny, to zachowanie urz
ą
dzenia i u
ż
yteczno
ść
przyj
ę
tego
rozwi
ą
zania koncepcyjnego mo
ż
na potwierdzi
ć
dopiero w pó
ź
nej fazie projektowania.
Wtedy jednak nawet niewielkie zmiany konstrukcyjne s
ą
bardzo kosztowne.
Mechatronika - interdyscyplinarne podej
ś
cie
Konwencjonalne metody projektowania in
ż
ynierskiego nie wystarczaj
ą
do racjonalnego
projektowania urz
ą
dze
ń
mechatronicznych. S
ą
dwie główne przyczyny takiego stanu rzeczy:
• zmieniaj
ą
si
ę
obiekty projektowania oraz
• zmieniaj
ą
si
ę
narz
ę
dzia projektowania.
Obiekty rozwa
ż
ane w konwencjonalnych metodach projektowania s
ą
zwykle
jednodyscyplinowymi (mechanicznymi, elektronicznymi), podczas gdy urz
ą
dzenia
mechatroniczne s
ą
obiektami wielodyscyplinowymi. Konwencjonalne podej
ś
cie do projektowania
nie jest wystarczaj
ą
ce do multidyscyplinarnej wiedzy in
ż
ynierskiej, która jest istotna w warunkach
konkurencji na rynku. Obecnie in
ż
ynier w swojej pracy projektowej u
ż
ywa coraz wi
ę
cej
oprogramowania. Od edytora tekstu do in
ż
ynierskiej bazy danych, od systemów 2D/3D CAD
(ang. Computer Aided Design) do analizy metod
ą
elementów sko
ń
czonych. Poprawia to nie tylko
skuteczno
ść
jego pracy, ale zmienia równie
ż
sposób pracy in
ż
yniera. Dlatego te
ż
poszukuje si
ę
nowych rozwi
ą
za
ń
integruj
ą
cych modelowanie systemu mechatronicznego.
Z koncepcji integruj
ą
cych na uwag
ę
zasługuj
ą
:
• integrowanie na płaszczy
ź
nie oprogramowania komponentów systemu,
• oparcie si
ę
na oprogramowaniu komputerowym, integruj
ą
cym wiedz
ę
ró
ż
nych ekspertów,
• wykorzystanie j
ę
zyków in
ż
ynierii oprogramowania,
• podej
ś
cie in
ż
ynierii współbie
ż
nej nazywane kompilatorem.
Nale
ż
y przy tym pami
ę
ta
ć
tak
ż
e o tym,
ż
e podczas syntezy produktów mechatronicznych wa
ż
na
jest nie tyle integracja nowoczesnych metod analizy (narz
ę
dzia CAD), ile rozumienie
i do
ś
wiadczenie konstruktora.
Integracja dyscyplin w mechatronice
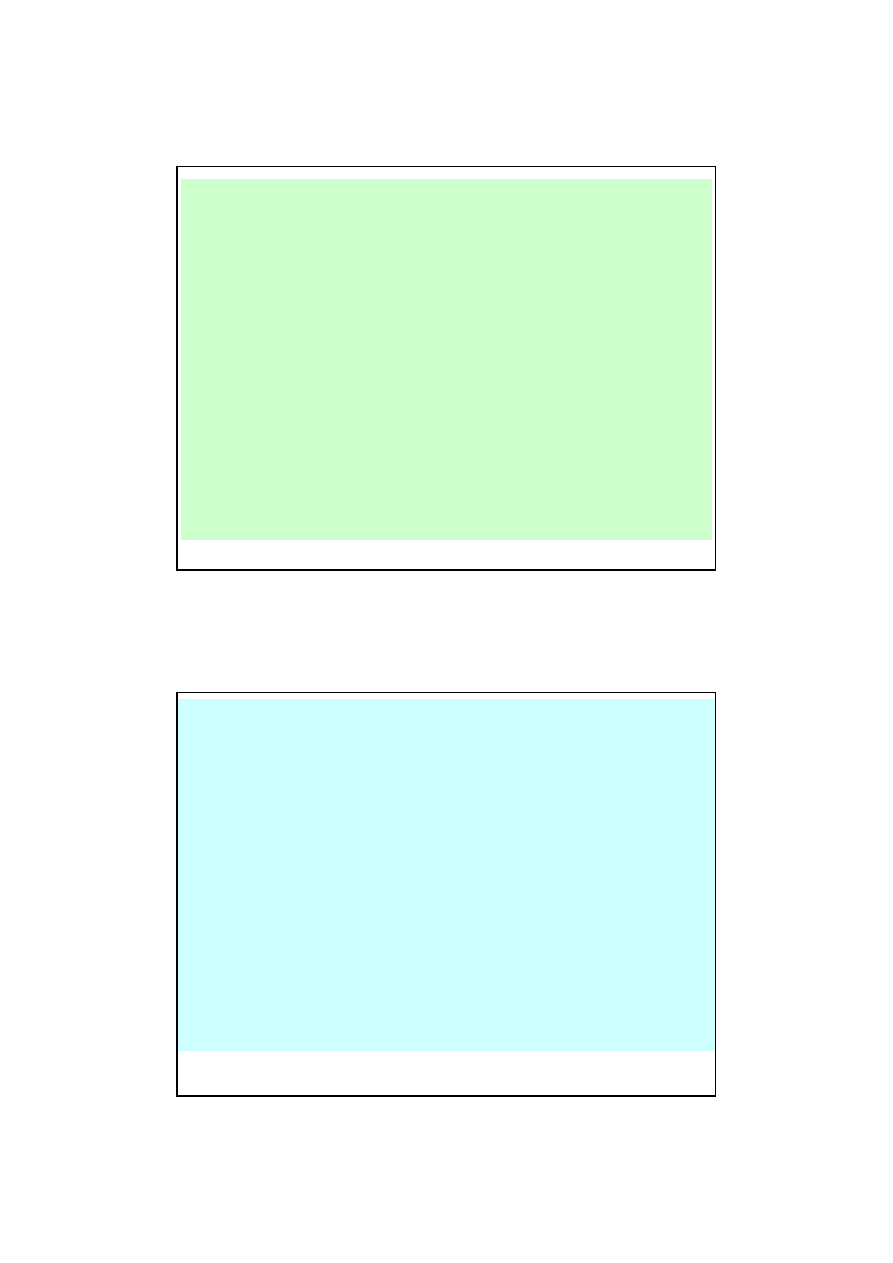
25
Powody integrowania mikroprocesorów z maszynami
Głównymi powodami wbudowywania mikroprocesorów w urz
ą
dzenia mechaniczne s
ą
:
1) poszerzenie własno
ś
ci, 2) uproszczenie, 3) innowacyjno
ść
.
Ad 1. Zasadnicza konstrukcja urz
ą
dzenia pozostaje taka sama, a cz
ę
sto jest ju
ż
nawet
przestarzała. Dodanie mikroprocesora mo
ż
e rozszerzy
ć
lub poprawi
ć
dokładno
ść
, szybko
ść
pracy
czy elastyczno
ść
zastosowania, zredukowa
ć
wymagania eksploatacyjne i poprawi
ć
niezawodno
ść
. Typowym tego przykładem jest układ sterowania silnikiem samochodowym. Układ
ten zwi
ę
ksza ekonomiczno
ść
silnika, daje łagodniejszy bieg jałowy i dłu
ż
sze okresy mi
ę
dzy
kolejnymi przegl
ą
dami technicznymi.
Ad 2. System mikroprocesorowy mo
ż
e zast
ą
pi
ć
jeden lub kilka skomplikowanych mechanizmów.
Przykładem tego mo
ż
e by
ć
modernizacja nacinania gwintów na tokarce. W tokarce tradycyjnej do
nap
ę
du wrzeciona i
ś
ruby poci
ą
gowej słu
ż
y ten sam silnik. Do zapewnienia mo
ż
liwo
ś
ci nacinania
gwintów o ró
ż
nym skoku konieczne jest wykorzystanie zestawu wymiennych kół z
ę
batych
i przekładni wielostopniowej o bardzo du
ż
ej liczbie przeło
ż
e
ń
. Natomiast rozwi
ą
zanie
mechatroniczne (tokarka CNC) polega na zastosowaniu oddzielnych silników do nap
ę
du
ś
ruby
poci
ą
gowej i wrzeciona tokarki, a przekładnia z
ę
bata staje si
ę
zbyteczna. Elektroniczne
sterowanie jest wygodniejsze, poniewa
ż
„przekładnia” elektroniczna jest bezstopniowa i umo
ż
liwia
nacinanie gwintów o dowolnym skoku. Konstrukcja mechaniczna takiej tokarki jest uproszczona,
a jej zespoły mog
ą
by
ć
u
ż
ywane bardziej elastycznie, co sprzyja oszcz
ę
dno
ś
ci kosztów.
Ad 3. Zastosowanie mikroprocesorów umo
ż
liwia wytwarzanie takich produktów czy systemów,
które dotychczas nie mogły by
ć
zrealizowane. Chodzi tutaj przede wszystkim o roboty i maszyny,
które wymagaj
ą
zaawansowanych technologii sensorycznych, jak np. rozpoznawania obrazu.
Dwa pierwsze powody nie wykluczaj
ą
si
ę
wzajemnie. W wielu przypadkach zastosowanie
mikroprocesorów daje podwójn
ą
korzy
ść
: poprawia osi
ą
gi i obni
ż
a koszty.
Ze wzgl
ę
du na rosn
ą
c
ą
konkurencj
ę
na rynku pozostan
ą
na dłu
ż
ej ze swoimi wyrobami tylko te
przedsi
ę
biorstwa produkcyjne, które lepiej od konkurentów przystosuj
ą
si
ę
do wymaga
ń
krótszych
cykli rozwoju oraz innowacyjnych wyrobów i technologii.
Mechatroniczne wyroby, integruj
ą
ce elementy mechaniczne, elektryczne i elektroniczne oraz
informatyczne, wnosz
ą
lepsz
ą
i rozszerzon
ą
funkcjonalno
ść
, przy równocze
ś
nie zredukowanej
wielko
ś
ci i zapotrzebowaniu na zasoby oraz mniejszych kosztach produkcji. Jednak mechatronika
stawia tak
ż
e nowe wymagania dotycz
ą
ce projektowania wyrobów, ich monta
ż
u, organizacji
i logistyki.
Interdyscyplinarno
ść
mechatroniki otwiera tym samym przed wyrobami nowe perspektywy
w rywalizacji o spełnienie oczekiwa
ń
klientów. Skuteczne przeniesienie tych potencjalnych
mo
ż
liwo
ś
ci wi
ąż
e si
ę
jednak z konieczno
ś
ci
ą
zintegrowanego my
ś
lenia i działania zwi
ą
zanych z tym
uczestników.
Przedsi
ę
biorstwa, które wytwarzaj
ą
wyroby mechatroniczne pozostaj
ą
zwykle pod silnym wpływem
nawyków zwi
ą
zanych ze stron
ą
mechaniczn
ą
i elektrotechniczn
ą
. Jednak mechatroniczne wyroby
wymagaj
ą
zupełnie innego podej
ś
cia, przebiegów i zada
ń
podczas rozwoju, zarówno wyrobów jak
i procesów ich wytwarzania, ani
ż
eli układy (systemy) czysto mechaniczne czy elektroniczne.
Ju
ż
podczas rozwoju wyrobu konieczne jest uwzgl
ę
dnienie i ocena mo
ż
liwo
ś
ci zastosowania
w systemie rozwi
ą
za
ń
pochodz
ą
cych z ró
ż
nych dziedzin. Oznacza to,
ż
e ze wzgl
ę
dów zarówno
technicznych jak i ekonomicznych musi by
ć
okre
ś
lona najlepsza z mo
ż
liwych koncepcja wyrobu.
W opartych na tym kolejnych procesach rozwojowych interfejsy wyrobu wymagaj
ą
intensywnej
integracji dotycz
ą
cej synchronizacji tych procesów w zakresie mechaniki, elektroniki
i oprogramowania.
Wymagania dotycz
ą
ce wytwarzania wyrobów
mechatronicznych
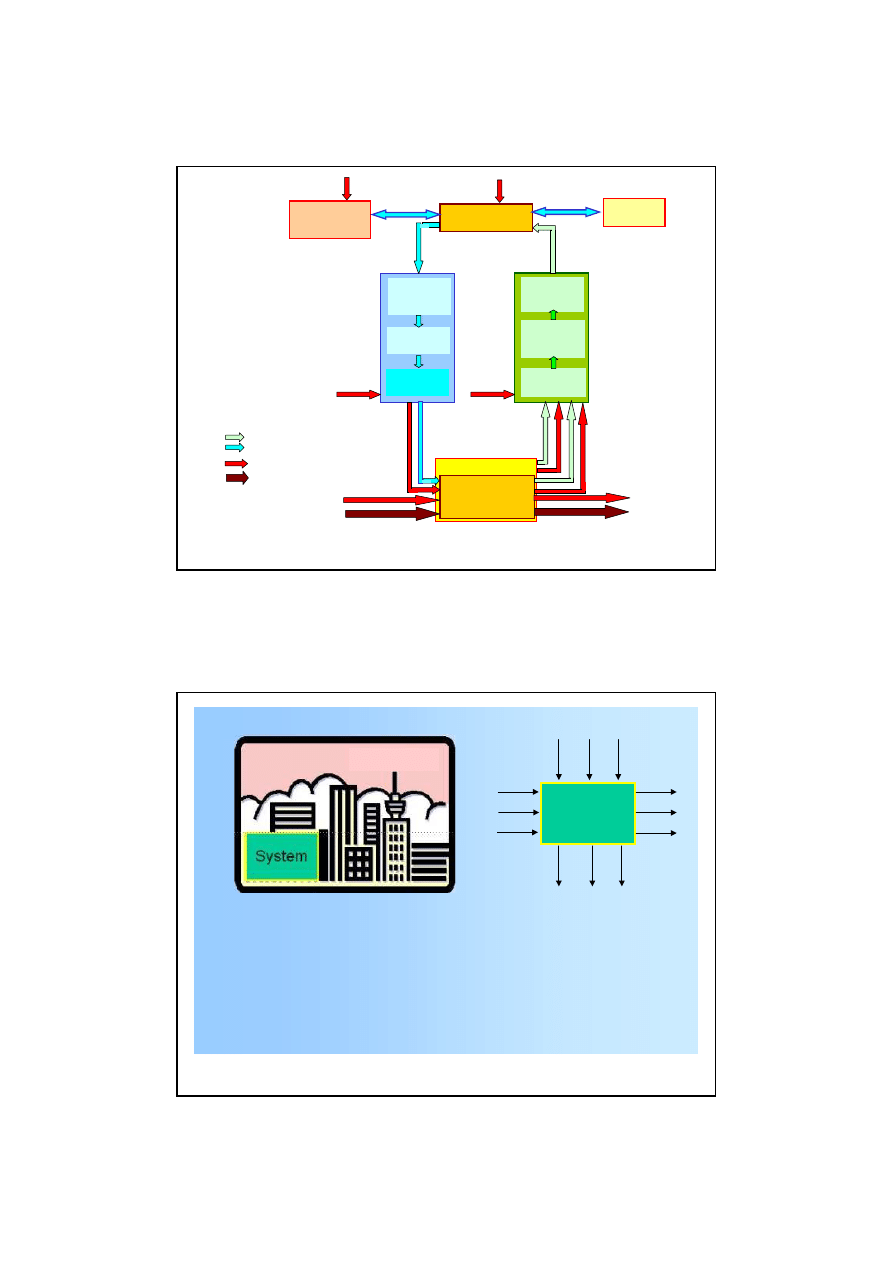
26
Struktura urz
ą
dzenia mechatronicznego oraz powi
ą
zanie
jego zespołów przez przepływ energii, masy i informacji
Otoczenie
Człowiek
Przetwarzanie
informacji
Informatyczne
urz
ą
dzenia
współpracuj
ą
ce
Energia
zasilania
Energia
zasilania
System
komunikacji
Interfejs człowiek-
maszyna
Przetwarzanie
cyfrowo-
analogowe
Dopasowanie/
wzmocnienie
Aktuatory
Obróbka
wst
ę
pna
Przetwarzanie
analogowo-
cyfrowe
Sensory
Energia
zasilania
Energia
zasilania
System podstawowy
(struktura
mechaniczna)
Wielko
ś
ci
analogowe (głównie
przepływ energii i
materiału)
Wielko
ś
ci cyfrowe
(głównie przepływ
informacji)
Przepływ energii
Przepływ materiałów
Przepływ informacji
System i jego własno
ś
ci
Otoczenie
System
System: jest to w pewien sposób
wyodr
ę
bniona z otoczenia cz
ęść
,
a jej ograniczenia wynikaj
ą
ze
sformułowania problemu.
System
A
1
A
2
A
3
(wej
ś
cie)
A
9
(wyj
ś
cie)
A
4
A
5
A
6
A
7
A
8
A
10
A
11
A
12
Ka
ż
dy system wzgl
ę
dem otoczenia
ma okre
ś
lone własno
ś
ci (cechy),
które s
ą
nazywane
atrybutam
atrybutami.
Atrybuty, które nie s
ą
wielko
ś
ciami
wej
ś
ciowymi (ang. Input)
i wielko
ś
ciami wyj
ś
ciowymi (ang.
Output), lecz opisuj
ą
zachowanie
si
ę
systemu nazywa si
ę
stanami
stanami.
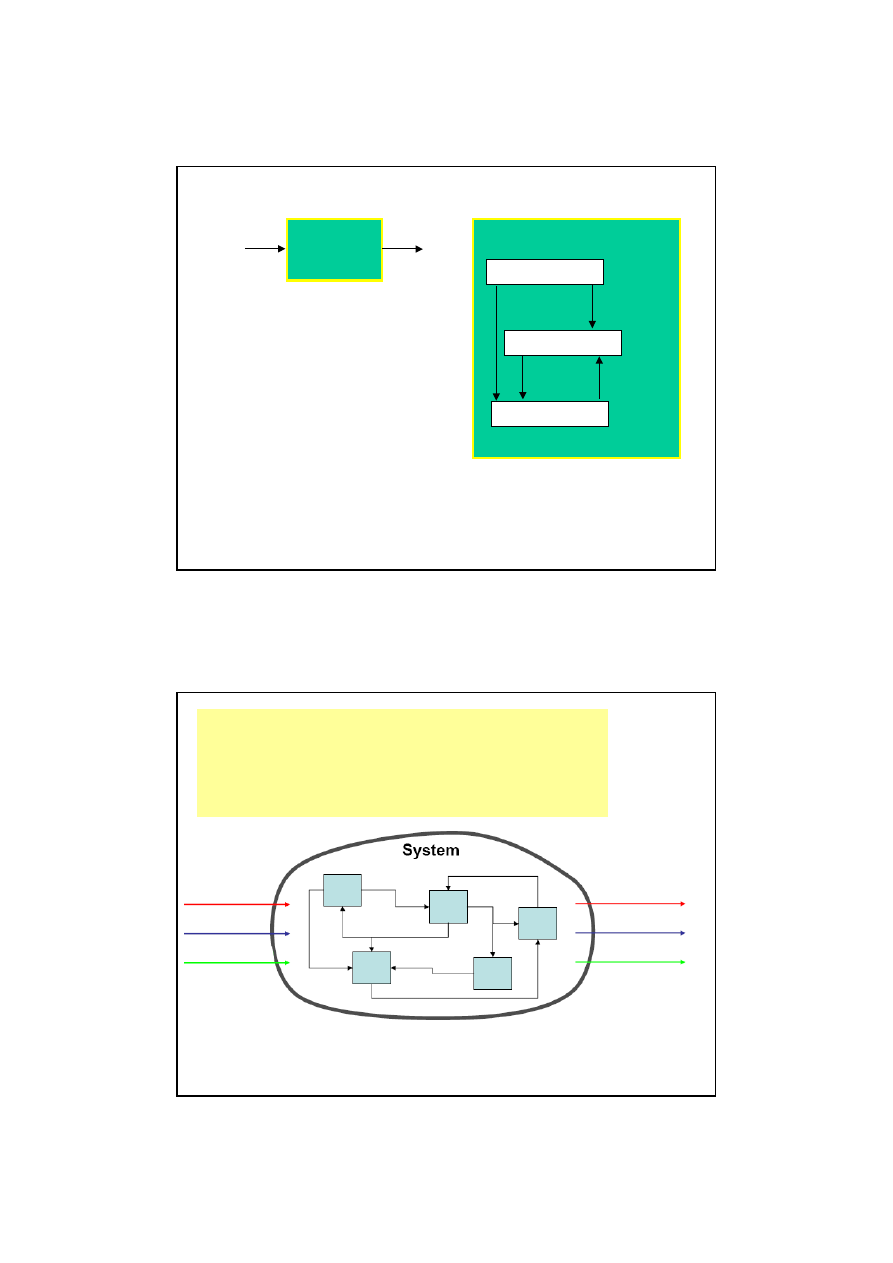
27
Funkcje i struktura systemu
Podsystem 1
Podsystem 3
Podsystem 2
Relacja R
12
Relacja R
32
Relacja R
23
Relacja R
13
System
System
A
1
A
2
Funkcja F: A
1
→
→
→
→
A
2
Pomi
ę
dzy atrybutami systemu
wyst
ę
puj
ą
zale
ż
no
ś
ci w postaci funkcji.
Je
ż
eli funkcja F nie jest znana, to taki
system okre
ś
la si
ę
jako czarn
ą
skrzynk
ę
(ang. Black box).
System zwykle zawiera podsystemy,
których wzajemne zale
ż
no
ś
ci s
ą
opisane relacjami R. Liczb
ę
relacji
nazywa si
ę
struktur
ą
systemu
.
Definicja systemu
Definicja systemu:
Definicja systemu:
„… ograniczony układ wzajemnie oddziałuj
ą
cych elementów,
… jest wyodr
ę
bniony z otoczenia przez warstw
ę
oddzielaj
ą
c
ą
.
Warstwa oddzielaj
ą
ca tworzy poł
ą
czenia systemu z otoczeniem …“
(przepływ materiałów, energii i informacji).
Wej
ś
cie: u(t) Stan wewn
ę
trzny: x(t) Wyj
ś
cie: y(t)
Otoczenie
Energia
Energia
Materiał
Materiał
Informacje
Informacje
28
System
Fizycznie/ technicznie lub matematycznie/ logicznie powi
ą
zana
jednostka.
Zamkni
ę
ty wewn
ę
trzny stan, w którym odwzorowana jest
fizyczna lub logiczna pami
ęć
.
Reprezentuje zasad
ę
przyczyna-skutek, przy czym zewn
ę
trzne
wej
ś
cia s
ą
przyczynami, a wyj
ś
cia na zewn
ą
trz s
ą
widocznymi
skutkami (oddziaływaniem).
Pojedyncze systemy nadaj
ą
si
ę
jako moduły do budowy bardziej
zło
ż
onych struktur. Natomiast system mo
ż
e si
ę
składa
ć
z podsystemów.
Przykłady systemów mechatronicznych
Proste wyroby (urz
ą
dzenia)
Sprz
ę
t AGD („gor
ą
ce wyroby”)
Samochody (pojazdy)
Technika medyczna
Technika lotnicza i kosmiczna
Sprz
ę
t domowy („br
ą
zowe wyroby”)
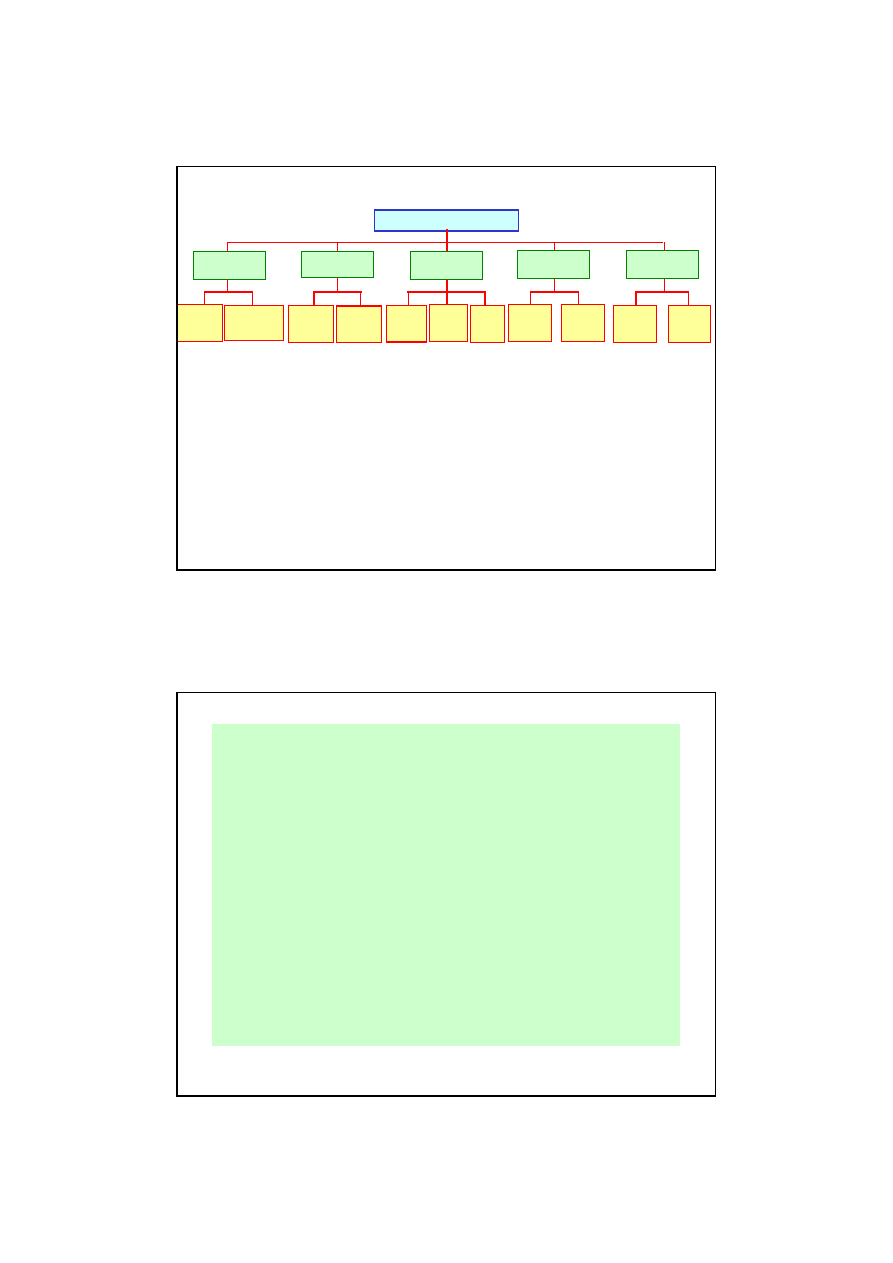
29
Układy mechatroniczne – podział z przykładami
Elementy
maszyn
- ło
ż
yska
- przeguby
Systemy mechaniczne
Składniki
realizuj
ą
ce
siły i ruchy
Maszyny
siłowe
Maszyny
robocze
Pojazdy
Poci
ą
gi
Samo-
loty
Składn.
mech.
precyz.
Urz
ą
dz.
mech.
precyz.
Zespoły
mikro-
mechan.
Układy
mikro-
mechan.
Zespoły
mechaniczne
Maszyny
Ś
rodki
komunikacji
Mechanika
precyzyjna
Mikro-
mechanika
- poł
ą
czenia
kinematyczne
- ła
ń
cuchy
nap
ę
dowe
- składniki
hydraul./
pneumat.
- składniki
elektro-
mechaniczne
- silniki
elektrycz.
- silniki
tłokowe
- turbiny
- generatory
elektryczne
- turbo-
generatory
- silniki
tłokowe
- obrabiarki
- maszyny
wytwórcze
- maszyny
rolnicze
- samoch.
osobowe
- samoch.
ci
ęż
arowe
- pojazdy
wojskowe
- samol.
pasa
ż
.
- samol.
wojsk
.
- ło
ż
yska
- przeguby
- poł
ą
cz,
kinemat.
- ł
ąń
cuchy
nap
ę
dów
- wył
ą
czniki
- przeka
ź
n.
- czujniki
- aktuatory
- odtwarz.
- drukarki
- urz
ą
dz.
komunikac.
- urz
ą
dz.
ko
ń
cowe
- urz
ą
dz.
optyczne
- urz
ą
dz.
medyczne
- ło
ż
yska
- przeguby
- poł
ą
cz.
kinemat.
- ła
ń
cuchy
nap
ę
dów
- czujniki
- aktuatory
- silniki
- pompy
Przykłady systemów mechatronicznych – artykuły konsumpcyjne:
odtwarzacz CD,
aparat fotograficzny z autofocusem,
odtwarzacz wideo,
kamera wideo,
odtwarzacz MP3,
telefon komórkowy,
drukarka,
pralka automatyczna,
suszarka,
robot kuchenny (domowy),
…
Przykłady systemów mechatronicznych
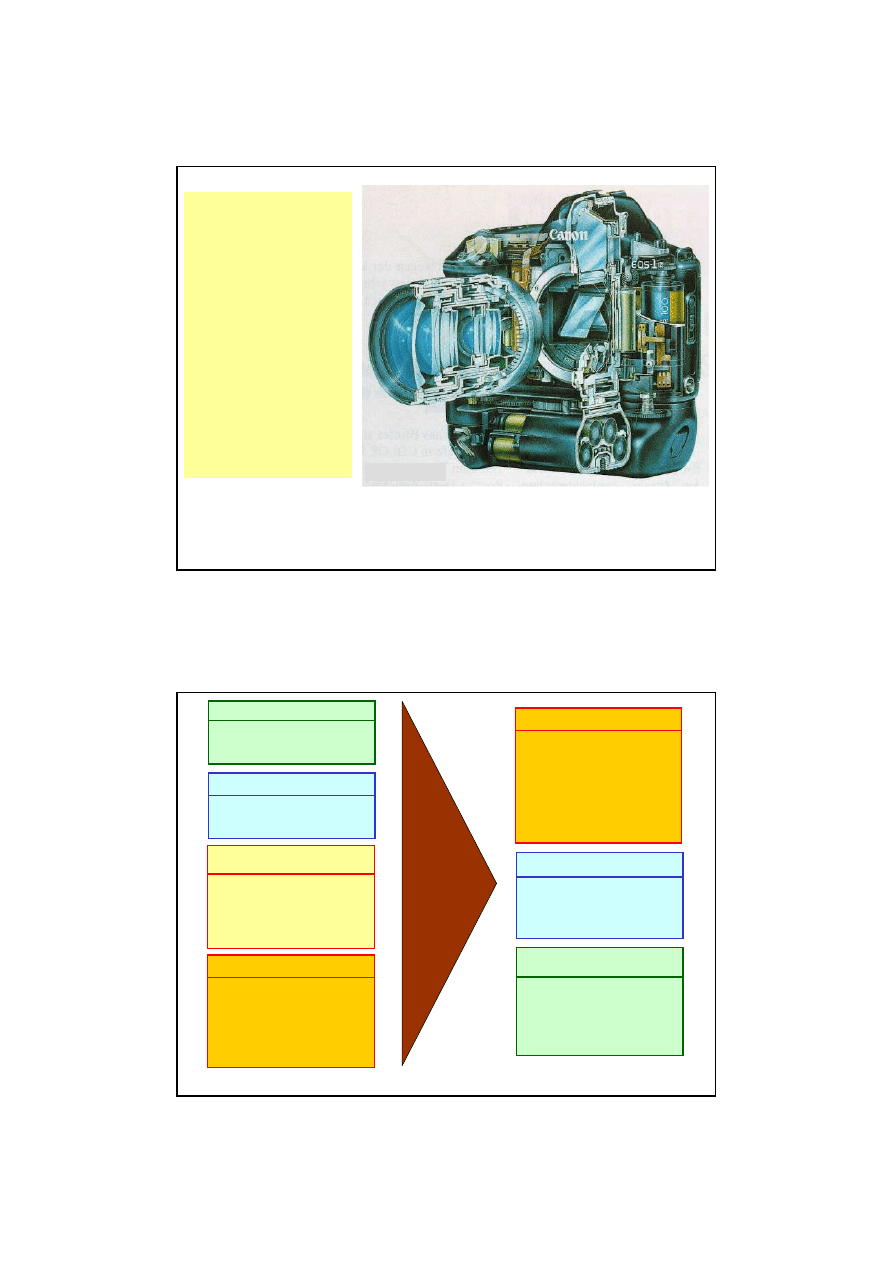
30
Walkman
Odtwarzacz CD
Aparat
fotograficzny
z autofokusem
Odtwarzacz wideo
Kamera wideo
Odtwarzacz MP3
Telefon
komórkowy
z aparatem
fotograficznym
Grafika: Canon
Mechatronika w artykułach
konsumpcyjnych
Elektromechanika
Elektromechanika
• Mechanika
• Elektrotechnika
Teoria systemów i teoria
Teoria systemów i teoria
sterowania
sterowania
• Teoria stanów
• Układy adaptacyjne
• Układy o wysokiej
zło
ż
ono
ś
ci
Mikroelektronika
Mikroelektronika
• Informatyka elektroniczna
• Elektronika mocy
Informatyka
Informatyka
• Oprogramowanie
sterowania
• Oprogramowanie
projektowe
• Systemy ekspertowe
Innowacyjne własno
ś
ci
Innowacyjne własno
ś
ci
• Wy
ż
sza funkcjonalno
ść
• Rozproszona inteligencja
• Bezpiecze
ń
stwo
• Elastyczno
ść
• Rozszerzalna
funkcjonalno
ść
Nowoczesne projektowanie
Nowoczesne projektowanie
• Metody
• Narz
ę
dzia
•
Ś
rodowisko rozwojowe
Poziomy wyrobów
Poziomy wyrobów
mechatronicznych
mechatronicznych
• Poziom fabryki
• Poziom maszyny
• Poziom modułu
• Poziom składnika
M
E
C
H
A
T
R
O
N
IK
A
Mechatronika - podej
ś
cie interdycyplinarne
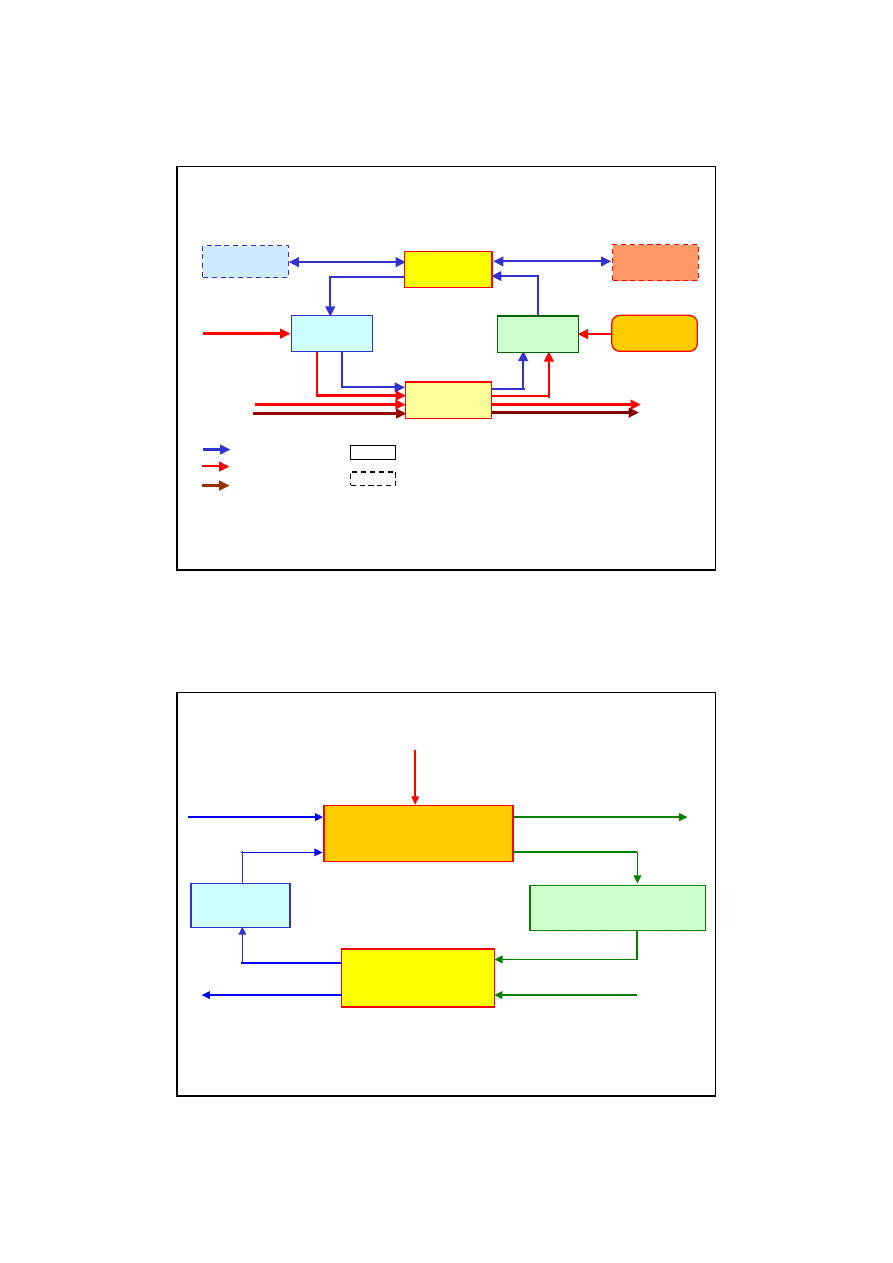
31
Podstawowa struktura układu mechatronicznego
Przetwarzanie
informacji
Przetwarzanie
informacji
Czujniki
Aktuatory
Całkowity
układ
System
komunikacyjny
Interfejs
człowiek-maszyna
Człowiek
Zasilanie
w energi
ę
Przepływ informacji
Przepływ energii
Przepływ materiałów
Jednostka niezb
ę
dna
Jednostka opcjonalna
Otoczenie
Struktura układu mechatronicznego
Układ sterowania
i regulacji
Aktuator
Urz
ą
dzenie pomiarowe
(sensor)
Układ podstawowy
(najcz
ęś
ciej mechaniczny)
Meldunki zwrotne
Wielko
ś
ci
nastawiaj
ą
ce
Sygnały
nastawiaj
ą
ce
Siły/ momenty
Zakłócenia
Ruchy
Wielko
ś
ci mierzone
wzgl. zakłócaj
ą
ce
Sygnały mierzone
Wielko
ś
ci zadane
(wiod
ą
ce )
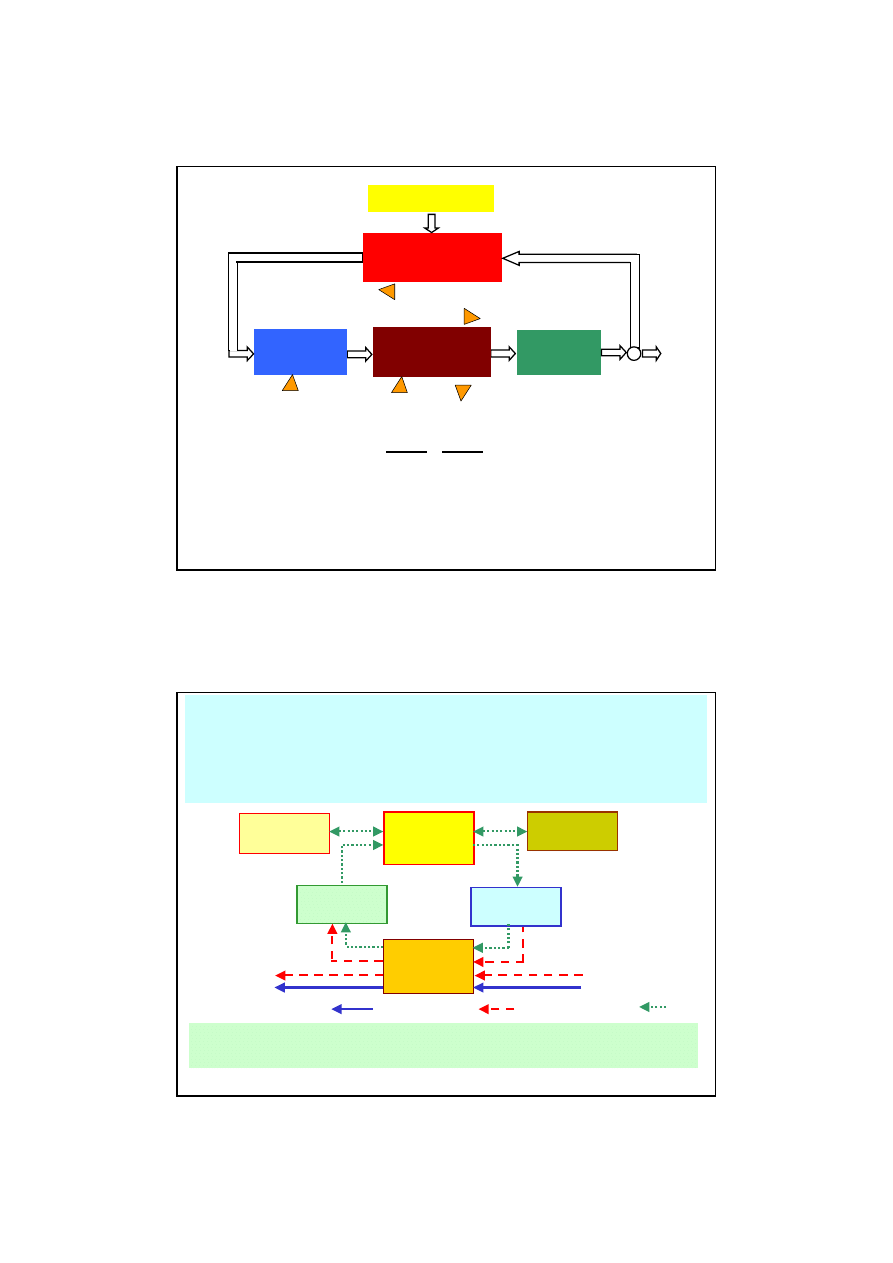
32
Proces mechaniczny i przetwarzanie energii
rozwin
ę
ły si
ę
do układów mechatronicznych
Obsługa
Przetwarzanie
informacji
Sensory
Układ mechaniczny
i przetwarzanie
energii
Aktuatory
Wielko
ś
ci zadane
Wielko
ś
ci mierzone
Strumie
ń
wykorzystywanej energii
Zasilanie
w energi
ę
Odbiornik
energii
Pierwotny
strumie
ń
energii
Pomocniczy
strumie
ń
energii
Strumie
ń
informacji
Strumie
ń
energii
mechanicznie
hydraulicznie
termodynamicznie
elektrycznie
Komponenty (składniki) systemu mechatronicznego s
ą
ze sob
ą
powi
ą
zane przepływem materiałów, energii
i sygnałów. Celem całego systemu jest m.in. kontrola przepływu materiałów i energii w układzie
mechanicznym. Układ mechaniczny styka si
ę
z otoczeniem wła
ś
nie przez przepływ materiałów i energii.
Pomi
ę
dzy tym układem oraz czujnikami i aktuatorami przepływa zarówno energia do pomiarów i
oddziaływania na zespoły mechaniczne, jak równie
ż
informacje pomiarowe i steruj
ą
ce. Układ przetwarzania
informacji ma przepływy informacji z sensorów i do aktuatorów (interfejs procesu). Jest on równie
ż
powi
ą
zany
z otoczeniem, aby móc si
ę
komunikowa
ć
z innymi układami sterowania (interfejs komunikacyjny) lub
u
ż
ytkownikiem (interfejs u
ż
ytkownika).
Z ogólnej struktury systemu mechatronicznego wywodz
ą
si
ę
równie
ż
układy, które nie zawieraj
ą
wszystkich
typowych składników. I tak mo
ż
na sobie wyobrazi
ć
systemy z czujnikami (sensorami) i oprogramowaniem,
ale bez aktuatorów.
Procesor
(informatyka)
Mechanika
(struktura
podstawowa)
Sensory
Aktuatory
U
ż
ytkownik
Zewn
ę
trzne
procesory
Przepływ materiałów:
Przepływ energii:
Przepływ informacji:
Struktura systemu mechatronicznego
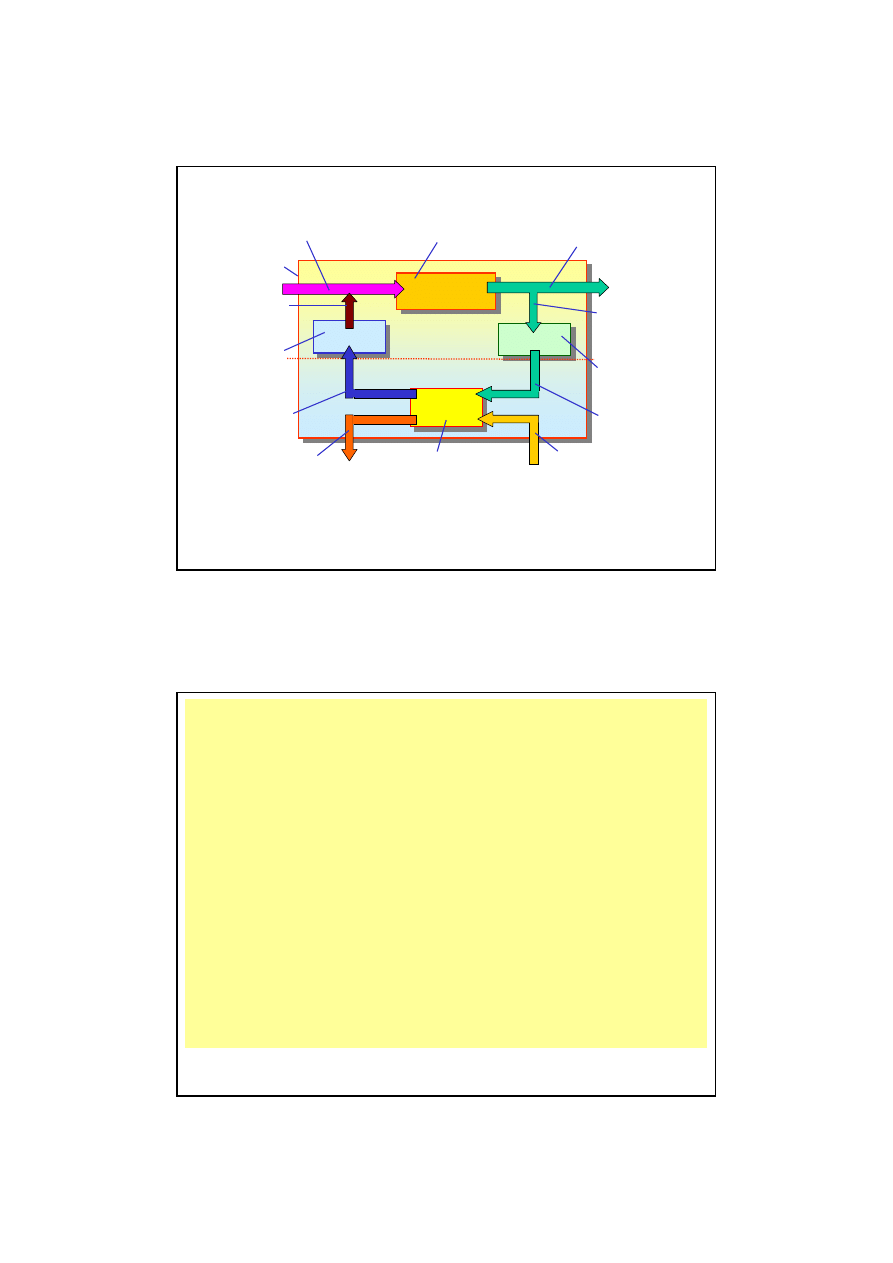
33
Model odniesienia (referencyjny) mechatroniki
Aktuator
Aktuator
Sensor
Sensor
System IT
System IT
Techniczny
system docelowy
Techniczny
system docelowy
Fizyczne wielko
ś
ci
wej
ś
ciowe z innych
systemów (ci
ą
głe w czasie)
Zamiana fizycznych wielko
ś
ci
wej
ś
ciowych w fizyczne
wielko
ś
ci wyj
ś
ciowe
Fizyczne wielko
ś
ci
wej
ś
ciowe do innych
systemów (ci
ą
głe w czasie)
Sprz
ęż
enie zwrotne
wielko
ś
ci fizycznych
wewn
ą
trz systemu
(ci
ą
głe w czasie)
Zamiana wielko
ś
ci
fizycznych na
sygnały dominuj
ą
ce
informacyjnie
Sygnały z sensora
(dyskretne / ci
ą
gle
w czasie)
Wej
ś
cie sygnałów
komunikacyjnych z innych
systemów lub z ingerencji
u
ż
ytkownika
Zamiana sygnałów
wej
ś
ciowych
w sygnały wyj
ś
ciowe
Wyj
ś
cie sygnałów
komunikacyjnych do innych
systemów lub meldunki zwrotne
do u
ż
ytkownika (dyskretne /
ci
ą
głe w czasie)
Sygnały do aktuatora
(dyskretne / ci
ą
głe
w czasie)
Zamiana sygnałów z
dominacj
ą
informacji
w wielko
ś
ci fizyczne
z dominacj
ą
energii
Działanie zwrotne
wielko
ś
ci fizycznych
wewn
ą
trz systemu
(ci
ą
głe w czasie)
Granica systemu
Dominuje energia
Dominuje informacja
IT (ang. Information Technology) – system informatyczny
Wa
ż
niejsze okre
ś
lenia stosowane w systemach
mechatronicznych
Układ podstawowy:
składa si
ę
ze struktury zawieraj
ą
cej elementy mechaniczne, hydrauliczne lub
pneumatyczne, albo ich kombinacji, w której realizowane jest okre
ś
lone działanie (np.
ruch, siła, itp.).
Czujnik (sensor):
słu
ż
y do okre
ś
lania stanu wybranych wielko
ś
ci systemu, zwykle przetwarza wielko
ś
ci
fizyczne w sygnały elektryczne, które nast
ę
pnie s
ą
przetwarzane jako informacje.
Przetwarzanie informacji:
okre
ś
la konieczne oddziaływania, aby w okre
ś
lony sposób wpływa
ć
na stan wielko
ś
ci
systemu i który obecnie jest najcz
ęś
ciej wykonany jako cyfrowy.
Aktuator (element wykonawczy):
słu
ż
y do realizacji oddziaływa
ń
bezpo
ś
rednio na układ podstawowy; dostarcza
(nastawia) siły i momenty, które prowadz
ą
do ruchu systemu.
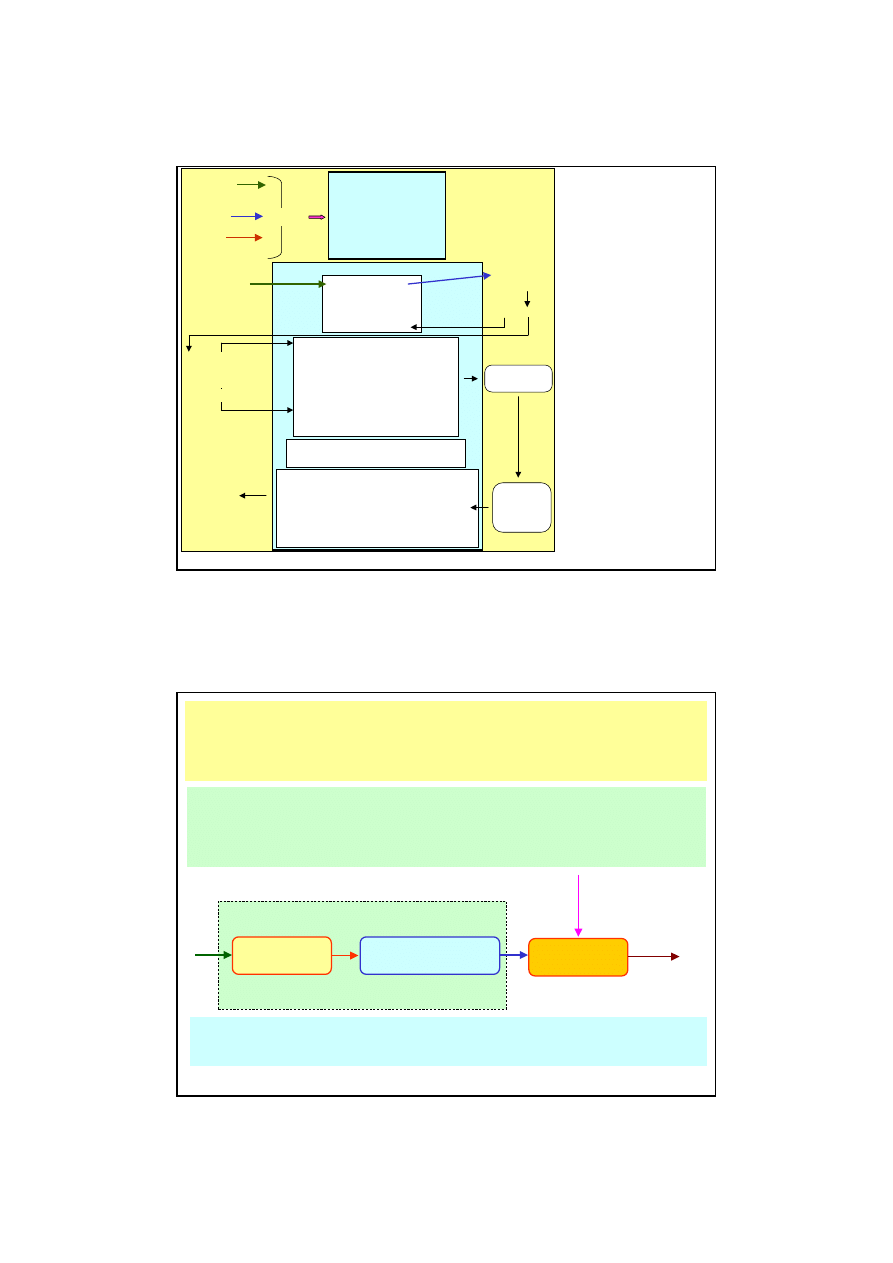
34
Automat biletowy jako przykład układu mechatronicznego
Zadanie:
Zadanie: wydanie biletu po
podaniu celu podró
ż
y lub
obszaru taryfowego
i zapłaceniu nale
ż
no
ś
ci
w postaci monet, banknotów
i karty kredytowej; wydawanie
reszty
Automat biletowy
Czujniki, procesor,
aktuatory z modułami:
mechanicznymi
elektrycznymi
informatycznymi
optycznymi
Informacje
Informacje
Cel podró
ż
y
Obszar taryfowy
Monety, banknoty
Karty kredytowe
Materiały
Materiały
Zasilanie
elektryczne
Energia
Energia
Automat biletowy
•Touch screen
• mikrokomputer
• pami
ęć
danych
• wy
ś
wietlacz informacji
(taryfy, ceny, itp.)
Dotykowe
wprowa-
dzanie
informacji
Dotykowe
wprowa-
dzanie
informacji
Czujniki do sprawdzania monet
• ci
ęż
ar monety:
→
elektroniczny moduł wa
żą
cy
• grubo
ść
monety:
→
czujnik optoelektroniczny
• stop, z którego wykonano monety:
→
czujnik magneto-elektroniczny
• czujnik rozpoznawania banknotów
Pami
ęć
monet i sortownik monet
Czytnik kart kredytowych i moduł
wydawania kart
Moduły drukowania, formatowania i
wydawania:
• elektromechaniczna drukarka biletów
• mechaniczny moduł ci
ę
cia biletów
• aktuator wydawania biletów
• moduł informatyczny do obliczania wydania reszty
• aktuator do wydawania reszty
Wprowadzanie
Wprowadzanie
Informacji:
Informacji:
Cel podró
ż
y
Obszar taryfowy
Wej
ś
cie
Informacja o
cenie dla
wybranego
celu
Wybór biletu
Monety, banknoty
Wprowadzanie
Wprowadzanie
materiałów:
materiałów:
Karty kredytowe
Wyj
ś
cie:
Wyj
ś
cie:
Bilet
Reszta
Odblokowanie
drukowania biletu
Sterowanie
drukowaniem,
formatowaniem
i wydawaniem
biletu
Sterowanie i regulacja
W systemach technicznych (np. technologicznych) bardzo cz
ę
sto wyst
ę
puje konieczno
ść
realizacji takich działa
ń
,
ż
eby zmienne w czasie wielko
ś
ci systemu miały okre
ś
lone przebiegi.
W najprostszym przypadku wielko
ś
ci te powinny mie
ć
stałe warto
ś
ci, pomimo działaj
ą
cych na
system zakłóce
ń
. Tego rodzaju zadania mo
ż
na realizowa
ć
przez zastosowanie sterowania
i regulacji. Nale
ż
y zatem wyja
ś
ni
ć
ró
ż
nic
ę
mi
ę
dzy oboma tymi poj
ę
ciami.
Sterowanie
I tak sterowanie jest działaniem, w którym nale
ż
y zrealizowa
ć
żą
dany przebieg czasowy
własnej wielko
ś
ci układu albo bez po
ś
rednictwa dalszych własnych (wewn
ę
trznych) wielko
ś
ci
tego układu, albo przy pomocy innych zewn
ę
trznych wielko
ś
ci. Wielko
ść
, na któr
ą
si
ę
oddziałuje nie jest mierzona.
Człon steruj
ą
cy
(sterownik)
Urz
ą
dzenie nastawiaj
ą
ce
(nastawnik, aktuator)
Obiekt
sterowania
Urz
ą
dzenie steruj
ą
ce
Urz
ą
dzenie steruj
ą
ce
w
u
Z
a
k
łó
c
e
n
ie
Wyj
ś
cie
z
y
Cech
ą
charakterystyczn
ą
sterowania jest otwarty przebieg działania. Nie ma sprz
ęż
enia
zwrotnego wielko
ś
ci wyj
ś
ciowej układu z jego wej
ś
ciem. Otwarty sposób działania jest cz
ę
sto
okre
ś
lany jako sterowanie w obwodzie otwartym.
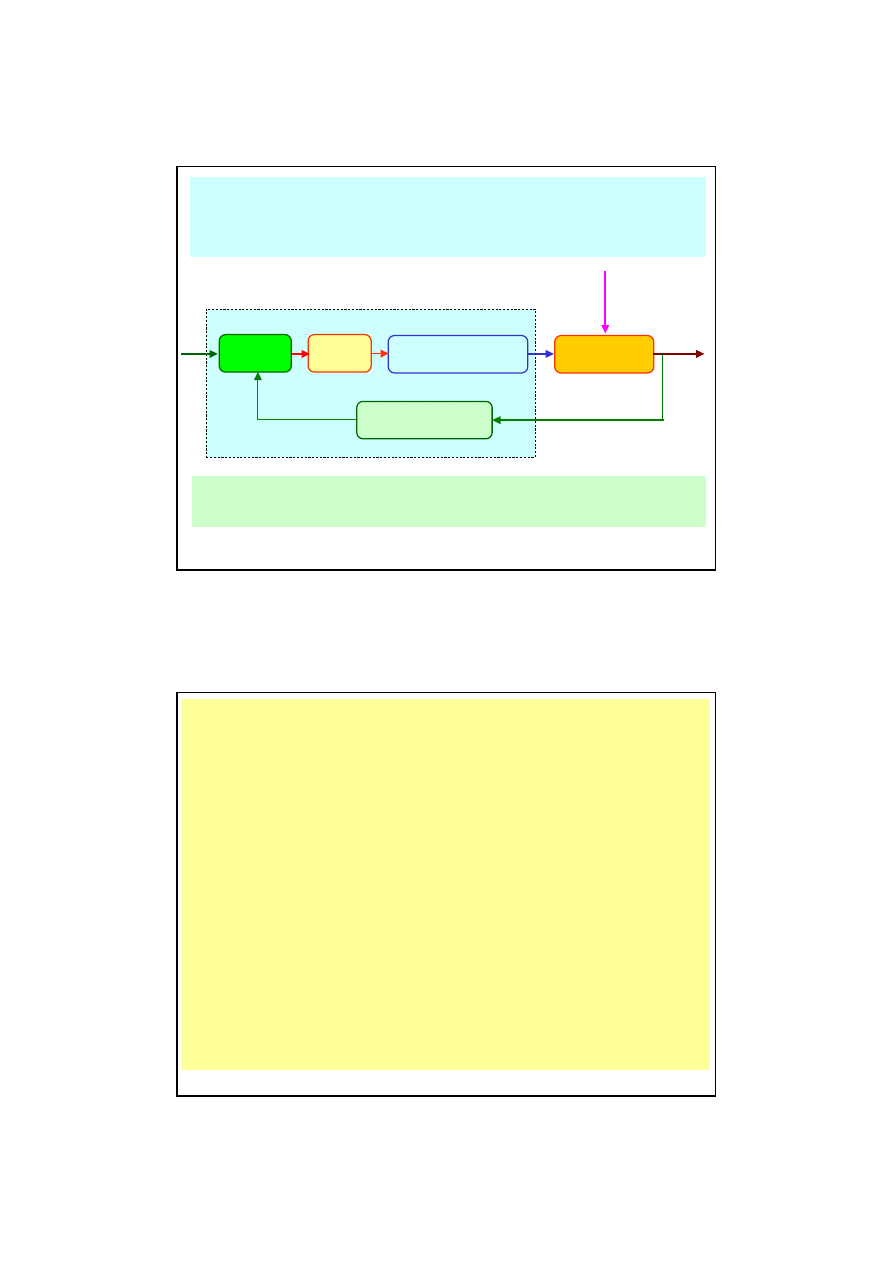
35
Regulacja
Pod poj
ę
ciem regulacji rozumie si
ę
natomiast takie działanie, w którym wielko
ść
regulowana
jest ci
ą
gle mierzona i porównywana z wielko
ś
ci
ą
zadan
ą
(wiod
ą
c
ą
). Za pomoc
ą
wyniku tego
porównania (ró
ż
nicy), uchybu regulacji, realizowane jest takie oddziaływanie na wielko
ść
regulowan
ą
,
ż
eby była ona równa wielko
ś
ci zadanej.
Regulacja
Z
a
k
łó
c
e
n
ie
Człon
porównuj
ą
cy
Urz
ą
dzenie nastawiaj
ą
ce
(nastawnik, aktuator)
Obiekt
regulacji
Urz
ą
dzenie regulacyjne
Urz
ą
dzenie regulacyjne
w
u
Miejsce
pomiaru
(wielko
ść
regulowana)
z
y
Regulator
Urz
ą
dzenie pomiarowe
(sensor, czujnik)
e
Tego rodzaju działanie odznacza si
ę
wyst
ę
powaniem sprz
ęż
enia zwrotnego (ujemnego)
wyj
ś
cia układu z jego wej
ś
ciem. Zbudowany w taki sposób zamkni
ę
ty obwód jest okre
ś
lany
jako obwód regulacji.
Elementy układu regulacji
Obiekt regulacji jest t
ą
cz
ęś
ci
ą
układu technicznego, który podlega oddziaływaniu. Obiekt rozpoczyna si
ę
w miejscu
nastawiania układu, w którym wielko
ść
nastawiaj
ą
ca u opuszcza regulator, a ko
ń
czy si
ę
w miejscu pomiaru, a zatem
tam gdzie wielko
ść
regulowana opuszcza obiekt regulacji.
Urz
ą
dzenie regulacyjne jest najwa
ż
niejszym składnikiem układu regulacji. Zawiera ono takie elementy, które realizuj
ą
zadania wymagane podczas regulacji. Nale
ż
y do niego m.in. urz
ą
dzenie pomiarowe. Słu
ż
y ono do tego, aby w
sposób ci
ą
gły dokonywa
ć
pomiaru wielko
ś
ci regulowanej
y
y w miejscu pomiaru. Człon porównuj
ą
cy (komparator) jest
potrzebny po to, aby zmierzon
ą
wielko
ść
regulowan
ą
(rzeczywist
ą
) porównywa
ć
z wielko
ś
ci
ą
zadan
ą
w
w i tworzy
ć
ró
ż
nic
ę
, która stanowi uchyb regulacji
e
e. Regulator przekształca uchyb regulacji
e
e w wielko
ść
wyj
ś
ciow
ą
z regulatora.
Urz
ą
dzenie nastawiaj
ą
ce jest ostatni
ą
cz
ęś
ci
ą
urz
ą
dzenia regulacyjnego, które wyprowadza wielko
ść
nastawiaj
ą
c
ą
u
u
do obiektu regulacji i tym samym jest odpowiedzialne za oddziaływanie na wielko
ść
regulowan
ą
y
y.
Punktami granicznymi pomi
ę
dzy obiektem regulacji i urz
ą
dzeniem regulacyjnym s
ą
miejsce pomiaru i miejsce
nastawiania. W miejscu pomiaru urz
ą
dzenie regulacyjne okre
ś
la stan wielko
ś
ci regulowanej, a w miejscu nastawiania
oddziałuje na obiekt.
Wielko
ś
ci charakterystyczne obwodu regulacji
Wielko
ść
zadana
w
w jest wielko
ś
ci
ą
, na któr
ą
podczas regulacji bezpo
ś
rednio si
ę
nie oddziałuje, jest ona wprowadzana
z zewn
ą
trz i pozostaje w zale
ż
no
ś
ci z wielko
ś
ci
ą
regulowan
ą
. Wielko
ść
zadana mo
ż
e by
ć
stała w czasie lub te
ż
ulega
ć
zmianie.
Uchyb regulacji
e
e uzyskuje si
ę
jako ró
ż
nic
ę
pomi
ę
dzy wielko
ś
ci
ą
zadan
ą
w
w a zmierzon
ą
wielko
ś
ci
ą
regulowan
ą
y
y
(wielko
ść
rzeczywista obiektu regulacji). Sygnał uchybu jest wprowadzany do regulatora, który zgodnie z okre
ś
lonymi
funkcyjnymi zale
ż
no
ś
ciami tworzy wielko
ść
nastawiaj
ą
c
ą
u
u.
Wielko
ść
nastawiaj
ą
ca
u
u jest wielko
ś
ci
ą
wyj
ś
ciow
ą
z urz
ą
dzenia regulacyjnego oraz wielko
ś
ci
ą
wej
ś
ciow
ą
obiektu
regulacji. Realizuje ona działanie steruj
ą
ce urz
ą
dzenia regulacyjnego na obiekt.
Wielko
ść
regulowana
y
y jest wielko
ś
ci
ą
wyst
ę
puj
ą
c
ą
na wyj
ś
ciu obiektu i jest ona mierzona za pomoc
ą
urz
ą
dzenia
pomiarowego. Celem regulacji jest okre
ś
lone oddziaływanie na t
ą
wielko
ść
. Jest ona równocze
ś
nie wielko
ś
ci
ą
wyj
ś
ciow
ą
obiektu regulacji i wielko
ś
ci
ą
wej
ś
ciow
ą
urz
ą
dzenia regulacyjnego.
Do wielko
ś
ci zakłócaj
ą
cych
z
z s
ą
zaliczane przede wszystkim wielko
ś
ci działaj
ą
ce z zewn
ą
trz, które powoduj
ą
niepo
żą
dane oddziaływania na obiekt. W wi
ę
kszo
ś
ci układów technicznych wyst
ę
puje wi
ę
cej ni
ż
jedno zakłócenie,
które ponadto mog
ą
mie
ć
ró
ż
n
ą
natur
ę
fizyczn
ą
. Jednak za pomoc
ą
układu pomiarowego w sposób po
ś
redni jest
zawsze wykrywany tylko wpływ wszystkich zakłóce
ń
na obiekt regulacji. Zakłóceniom mog
ą
równie
ż
podlega
ć
elementy
urz
ą
dzenia regulacyjnego, np. regulator.
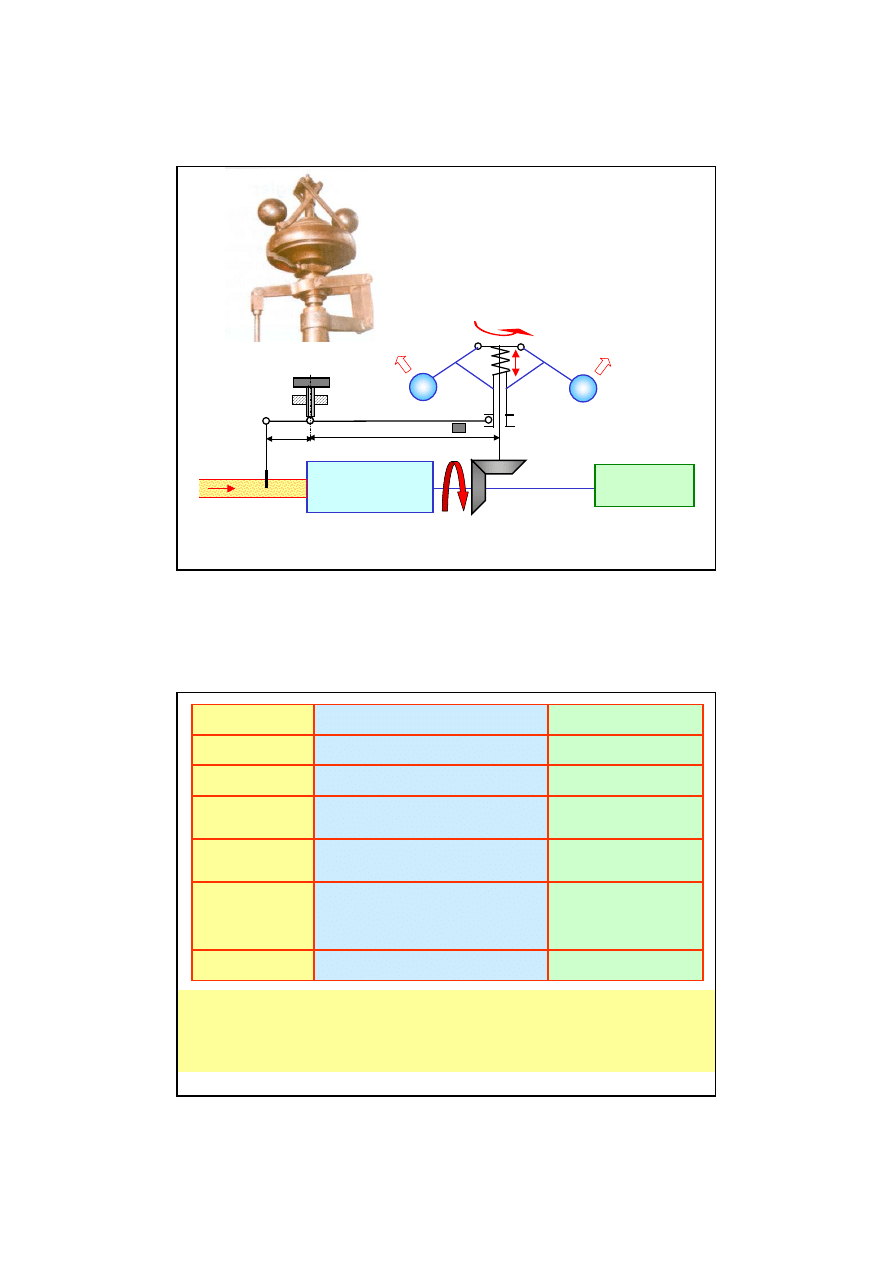
36
Regulator od
ś
rodkowy Watt’a maszyny parowej (1778 r.)
Maszyna parowa
Obci
ąż
enie
Para
n
Ś
ruba do
nastawiania
Wielko
ść
zadana
Wielko
ść
regulowana
a
b
Porównanie regulacji ze sterowaniem
Sterowanie jest nieprzydatne
w przypadku niestabilno
ś
ci.
W niestabilnych układach musi by
ć
zastosowana regulacja.
Przebiegi dla
niestabilnych układów
Wysokie nakłady, je
ż
eli musi
by
ć
uwzgl
ę
dnionych wiele
zakłóce
ń
.
Małe nakłady, je
ż
eli nie
wyst
ę
puj
ą
ż
adne zakłócenia.
Małe nakłady:
• pomiar wielko
ś
ci regulowanej,
• porównywanie warto
ś
ci zadanej z rzeczywist
ą
,
• wzmocnienie sygnału.
Nakłady techniczne
Reaguje szybko, je
ż
eli
zakłócenie jest bezpo
ś
rednio
mierzone.
Reaguje dopiero wtedy, gdy zmienia si
ę
ró
ż
nica
pomi
ę
dzy warto
ś
ci
ą
zadan
ą
i warto
ś
ci
ą
regulowan
ą
.
Reakcja na zakłócenia
(czasowo)
Jest reakcja tylko na te
zakłócenia, które s
ą
mierzone
i przetwarzane w układzie.
Wyst
ę
puje przeciwdziałanie wszystkim
zakłóceniom, które wpływaj
ą
na regulowany
układ.
Reakcja na zakłócenia
(ogólnie)
Wielko
ść
sterowana nie jest
mierzona i porównywana.
Wielko
ść
regulowana jest mierzona
i porównywana (z wielko
ś
ci
ą
zadan
ą
).
Pomiar i porównywanie
nastawianej wielko
ś
ci
Otwarta (ła
ń
cuch sterowania)
Zamkni
ę
ta (obwód regulacji)
Droga (obwód)
działania
Sterowanie
Regulacja
Cechy
charakterystyczne
W układach sterowania, w których zakłócenia nie s
ą
mierzone, wielko
ś
ci wyj
ś
ciowe (sterowane) mog
ą
odbiega
ć
od wielko
ś
ci zadanych.
Natomiast w układach regulacji wszystkie działaj
ą
ce na obiekt regulacji zakłócenia s
ą
okre
ś
lane przez
pomiar wielko
ś
ci regulowanej. Jedynym problemem jest to,
ż
e doregulowanie spowodowane działaniem
uchybu (odchylenia regulacji) odbywa si
ę
po zadziałaniu zakłócenia na układ, a zatem z opó
ź
nieniem.
37
Podział układów regulacji
Istnieje wiele mo
ż
liwo
ś
ci (kryteriów) klasyfikacji układów regulacji:
I tak układy regulacji mo
ż
na dzieli
ć
ze wzgl
ę
du na rodzaj i liczb
ę
wielko
ś
ci stanowi
ą
cych
sprz
ęż
enie zwrotne.
W przypadku regulacji z jedn
ą
wielko
ś
ci
ą
w obwodzie regulacji wyst
ę
puje tylko jedna p
ę
tla
sprz
ęż
enia zwrotnego. Spo
ś
ród wyst
ę
puj
ą
cych zwykle wielu wielko
ś
ci wyj
ś
ciowych obiektu
w układzie, do regulacji jest wykorzystywana tylko jedna z nich. Wymaga si
ę
wówczas,
ż
eby
ta wielko
ść
wystarczaj
ą
co dokładnie opisywała obiekt regulacji ze wzgl
ę
du na jego stan.
Je
ż
eli w układzie regulacji wyst
ę
puje wiele p
ę
tli sprz
ęż
enia zwrotnego, to wówczas jest to tzw.
regulacja z wieloma wielko
ś
ciami. Struktury układów regulacji z wieloma podrz
ę
dnymi
obwodami sprz
ęż
enia zwrotnego s
ą
nazywane tak
ż
e kaskadowymi układami regulacji.
Natomiast ze wzgl
ę
du na rodzaj zadania regulacyjnego rozró
ż
nia si
ę
układy:
regulacji stałowarto
ś
ciowej (stabilizuj
ą
ce) oraz
układy regulacji nad
ąż
nej (
ś
ledz
ą
ce).
W układach regulacji stałowarto
ś
ciowej warto
ść
zadana jest stała w długim okresie czasu.
Zadaniem układu regulacji jest minimalizacja oddziaływania na obiekt regulacji wyst
ę
puj
ą
cych
zakłóce
ń
.
Natomiast w przypadku układów regulacji nad
ąż
nej wielko
ść
zadana nie jest stała w czasie
i mo
ż
e si
ę
zmienia
ć
w sposób z góry nieprzewidziany (jest nieznan
ą
funkcj
ą
czasu).
Zadaniem urz
ą
dzenia regulacyjnego jest mo
ż
liwie dokładne odwzorowanie
przebiegu
czasowego wielko
ś
ci zadanej na wyj
ś
ciu obiektu (wielko
ś
ci regulowanej).
Klasyfikacja układów regulacji
W układach regulacji wyst
ę
puje wiele wymaga
ń
, które mog
ą
by
ć
silnie uzale
ż
nione od realizowanego zadania. Oprócz
tego s
ą
tak
ż
e wymagania dotycz
ą
ce wi
ę
kszo
ś
ci układów.
Wymagania dotycz
ą
ce układów regulacji
Układ regulacji powinien by
ć
mo
ż
liwie nieczuły i odporny na zmiany dowolnych parametrów obiektu
regulacji.
Odporno
ść
Odpowied
ź
układu regulacji na wyst
ą
pienie zakłócenia wzgl. zmian
ę
wielko
ś
ci zadanej musi by
ć
w
wystarczaj
ą
cym stopniu tłumiona, tzn. powinno by
ć
zapewnione ustalenie wielko
ś
ci regulowanej i tym
samym stabilno
ść
układu.
Tłumienie
Układ regulacji musi by
ć
wystarczaj
ą
co szybki, tzn. dynamiczne przebiegi sygnałów w przypadku
wyst
ą
pienia zakłócenia lub zmiany wielko
ś
ci zadanej musz
ą
by
ć
zako
ń
czone w okre
ś
lonym czasie.
Własno
ś
ci
dynamiczne
Statyczne odchylenie regulacji (uchyb) e po wyst
ą
pieniu zakłócenia wzgl. zmianie wielko
ś
ci zadanej
powinno by
ć
równe zeru lub nie przekracza
ć
zadanych granic.
Dokładno
ść
statyczna
Układ regulacji musi by
ć
stabilny. Oznacza to,
ż
e wyst
ę
puj
ą
ce w tym układzie sygnały dynamiczne
musz
ą
mie
ć
odpowiednie przebiegi w czasie.
Stabilno
ść
Wyja
ś
nienie
Kryterium
Wi
ę
kszo
ść
problemów technicznych w układach regulacji wymaga rozpatrzenia ju
ż
na pocz
ą
tku projektowania
kryteriów i ich realizacji w aplikacji układu.
Podczas wykonywania zada
ń
dotycz
ą
cych budowy układów regulacji wyst
ę
puj
ą
nast
ę
puj
ą
ce działania:
• modelowanie obiektów regulacji,
• projektowanie układu regulacji,
• synteza układu regulacji,
• implementacja i weryfikacja.
Jako
ść
zbudowanego układu regulacji, pomimo dysponowania obecnie
ś
rodkami wspomagaj
ą
cymi (np. systemy
komputerowe) nadal w znacznym stopniu zale
ż
y od wiedzy i do
ś
wiadcze
ń
osób wykonuj
ą
cych aplikacj
ę
.
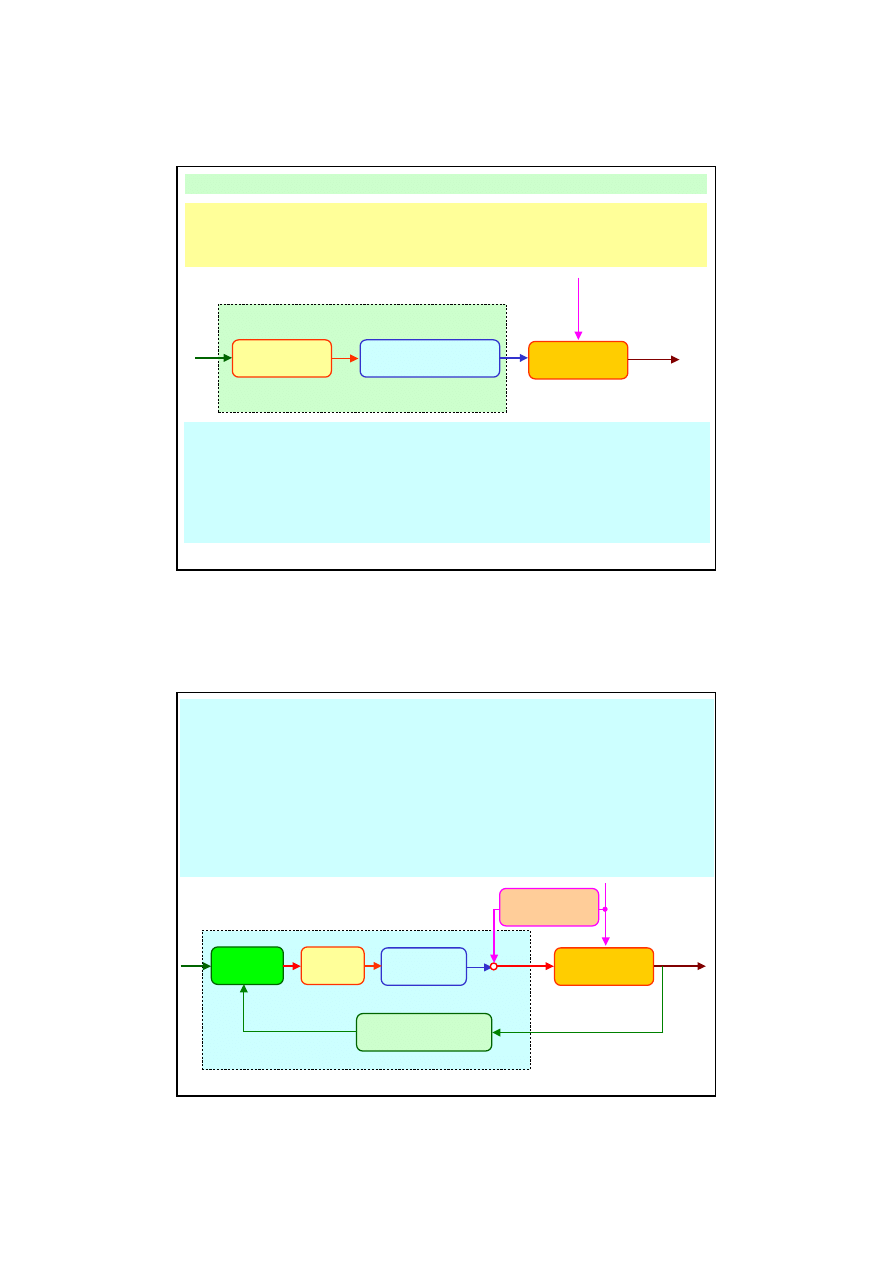
38
Zasady sterowania i regulacji w mechatronice
W zale
ż
no
ś
ci od wymaganej jako
ś
ci sterowania lub regulacji stosowane s
ą
ró
ż
ne struktury układów.
Sterowanie w obwodzie otwartym
Sterowanie w układzie otwartym charakteryzuje tym,
ż
e oddziaływanie na wielko
ść
sterowan
ą
y odbywa si
ę
przez wielko
ść
zadan
ą
w bez sprz
ęż
enia zwrotnego. Wskutek tego podczas takiego działania układu nie jest
mo
ż
liwe dopasowanie wielko
ś
ci nastawiaj
ą
cej u do „wyniku” sterowania.
Człon steruj
ą
cy
(sterownik)
Urz
ą
dzenie nastawiaj
ą
ce
(nastawnik, aktuator)
Obiekt
sterowania
Urz
ą
dzenie steruj
ą
ce
Urz
ą
dzenie steruj
ą
ce
w
u
Z
a
k
łó
c
e
n
ie
Wyj
ś
cie
z
y
Przykładami realizacji sterowania w układzie otwartym s
ą
silniki krokowe. Silniki krokowe mog
ą
by
ć
stosowane
do bezpo
ś
redniego pozycjonowania zespołów roboczych maszyn (urz
ą
dze
ń
) bez dodatkowego układu
pomiarowego lub obwodu regulacji. Stanowi
ą
one klasyczne rozwi
ą
zanie otwartego układu sterowania.
Zadania takiego urz
ą
dzenia steruj
ą
cego s
ą
nast
ę
puj
ą
ce:
• wyprowadzanie odcinków drogi proporcjonalnie do liczby impulsów,
• rozdział impulsów na poszczególne fazy w zale
ż
no
ś
ci od kierunku ruchu,
• sterowanie cz
ę
stotliwo
ś
ci
ą
impulsów.
Zasady regulacji w mechatronice
Zasady regulacji
Obwody z jedn
ą
p
ę
tl
ą
regulacji nie zawsze s
ą
wystarczaj
ą
ce w praktyce. Dlatego te
ż
cz
ę
sto spotyka si
ę
powi
ą
zanie
wielu obwodów regulacji. W wielu układach za pomoc
ą
obwodów regulacji z jedn
ą
p
ę
tl
ą
nie mo
ż
na uzyska
ć
wymaganej
dokładno
ś
ci działania w warunkach wyst
ę
puj
ą
cych zakłóce
ń
i przebiegu wielko
ś
ci zadanej. Za pomoc
ą
dodatkowych
obwodów regulacji mo
ż
na znacznie zwi
ę
kszy
ć
jako
ść
i szybko
ść
regulacji. Innym powodem stosowania wielu p
ę
tli
regulacji jest to,
ż
e konieczne jest uwzgl
ę
dnienie kilku wielko
ś
ci wyj
ś
ciowych, albo te
ż
oddziaływanie wielu wielko
ś
ci
zadanych.
Przy wyborze rodzaju układu regulacji miarodajne jest miejsce oddziaływania zasadniczych zakłóce
ń
.
Wł
ą
czenie wielko
ś
ci zakłócaj
ą
cej do członu nastawiaj
ą
cego
Ten rodzaj struktury układu regulacji jest stosowany wtedy, gdy główna wielko
ść
zakłócaj
ą
ca wyst
ę
puje blisko wej
ś
cia do
obiektu i mo
ż
e by
ć
ci
ą
gle mierzona i przetwarzania. Warunkiem wł
ą
czenia sygnału zakłócaj
ą
cego jest mierzalno
ść
wielko
ś
ci zakłócaj
ą
cej. Dzi
ę
ki temu regulator otrzymuje informacj
ę
o aktualnie działaj
ą
cym zakłóceniu nie dopiero wtedy,
gdy wpływ zakłócenia zostanie zmierzony na wyj
ś
ciu obiektu, lecz ju
ż
wcze
ś
niej jest informowany o wielko
ś
ci i rodzaju
zakłócenia. Informacje te s
ą
wykorzystywane do okre
ś
lenia wielko
ś
ci nastawiaj
ą
cej, która kompensuje wpływ zakłócenia
.
Z
a
k
łó
c
e
n
ie
Człon
porównuj
ą
cy
Urz
ą
dzenie
nastawiaj
ą
ce
Obiekt
regulacji
Urz
ą
dzenie regulacyjne
Urz
ą
dzenie regulacyjne
w
u
Miejsce
pomiaru
(wielko
ść
regulowana)
z
y
Regulator
Urz
ą
dzenie pomiarowe
(sensor, czujnik)
e
Wł
ą
czenie wielko-
ś
ci zakłócaj
ą
cej
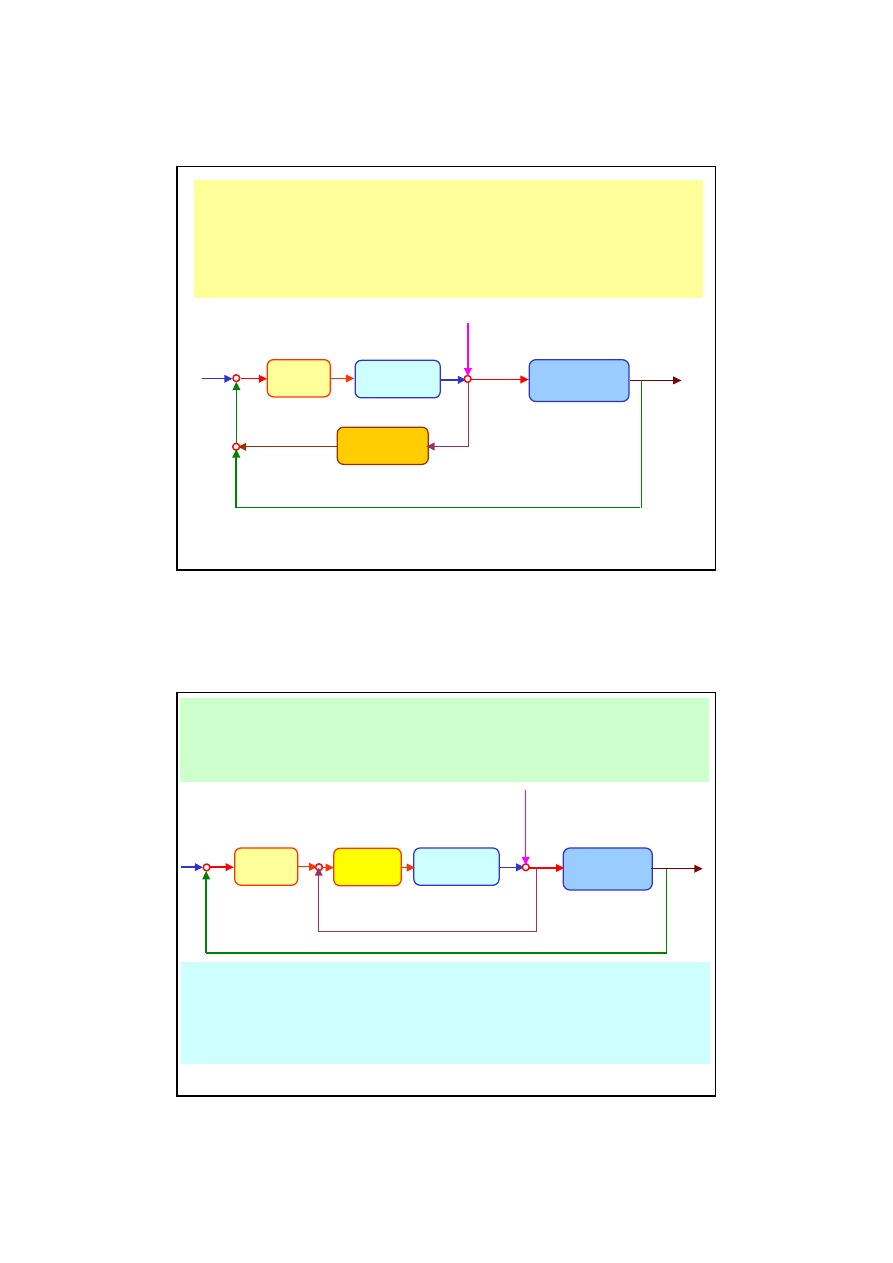
39
Regulacja ze stabilizuj
ą
c
ą
wielko
ś
ci
ą
pomocnicz
ą
Warunkiem zastosowania pokazanego wcze
ś
niej rozwi
ą
zania układu regulacji z wł
ą
czeniem
wielko
ś
ci zakłócaj
ą
cej jest mo
ż
liwo
ść
pomiaru zakłócenia, który to warunek cz
ę
sto nie jest
spełniony. Aby w takich przypadkach móc szybko reagowa
ć
na wyst
ę
puj
ą
ce zakłócenia,
konieczny jest pomiar oddziaływania zakłócenia na obiekt mo
ż
liwie blisko miejsca jego
działania. Ten pomiar odbywa si
ę
dodatkowo do wielko
ś
ci regulowanej y i jest okre
ś
lany jako
pomocnicza wielko
ść
regulacji y
p
.
Układ regulacji ze stabilizuj
ą
c
ą
wielko
ś
ci
ą
pomocnicz
ą
M
ie
js
c
e
z
a
k
łó
c
e
n
ia
Obiekt regulacji
(cz
ęść
1)
Obiekt regulacji
(cz
ęść
2)
w
u
Miejsce
pomiaru
(wielko
ść
regulowana)
z
y
Regulator
Człon
kompensacyjny
e
-
+
y
p
+
Układ regulacji o strukturze kaskadowej
Regulacja kaskadowa jest wa
ż
nym przypadkiem regulacji z wielko
ś
ci
ą
pomocnicz
ą
. Jest ona stosowana wtedy, gdy
główne zakłócenie wyst
ę
puje blisko wej
ś
cia obiektu i nie mo
ż
e by
ć
mierzone w sposób ci
ą
gły. Wtedy zakłócenia, które
wyst
ę
puj
ą
blisko wej
ś
cia obiektu mog
ą
by
ć
cz
ęś
ciowo kompensowane ju
ż
w obwodzie wewn
ę
trznym. W kaskadowym
układzie regulacji mo
ż
na stosowa
ć
sprz
ęż
enie zwrotne wielu wielko
ś
ci regulowanych w p
ę
tlach (obwodach) regulacji.
Umo
ż
liwia to pełny opis stanu obiektu i tym samym popraw
ę
dynamicznych przebiegów całego układu.
Z
a
k
łó
c
e
n
ie
Obiekt regulacji
(cz
ęść
1)
Obiekt regulacji
(cz
ęść
2)
w
u
Miejsce
pomiaru
(wielko
ść
regulowana)
z
y
Regulator
e
-
y
K
Regulator
pomocniczy
-
+
Jak to wida
ć
z rysunku pomocnicza wielko
ść
regulowana y
K
jest wprowadzana do regulatora pomocniczego, który
otrzymuje wielko
ść
przewodni
ą
z regulatora głównego. Regulator pomocniczy i cz
ęść
1 obiektu regulacji tworz
ą
pomocniczy obwód regulacji. Jego głównym zadaniem jest usuwanie z wielko
ś
ci regulowanej y działania zakłócenia
wyst
ę
puj
ą
cego w przedniej cz
ęś
ci obiektu. Zakłócenia te s
ą
przyło
ż
one do wyj
ś
cia pierwszej cz
ęś
ci obiektu i uj
ę
te jako
wielko
ść
z. Wielko
ść
zakłócaj
ą
ca z działa w pomocniczym obwodzie regulacji jako wielko
ść
wyj
ś
ciowa.
Klasycznym przykładem zastosowania regulacji kaskadowej jest regulacja pr
ą
du i pr
ę
dko
ś
ci obrotowej
w serwonap
ę
dach. Zasada regulacji kaskadowej jest zatem stosowana do realizacji sterowania torem ruchu
w obrabiarkach sterowanych numerycznie i robotach przemysłowych.
Układ regulacji o strukturze kaskadowej
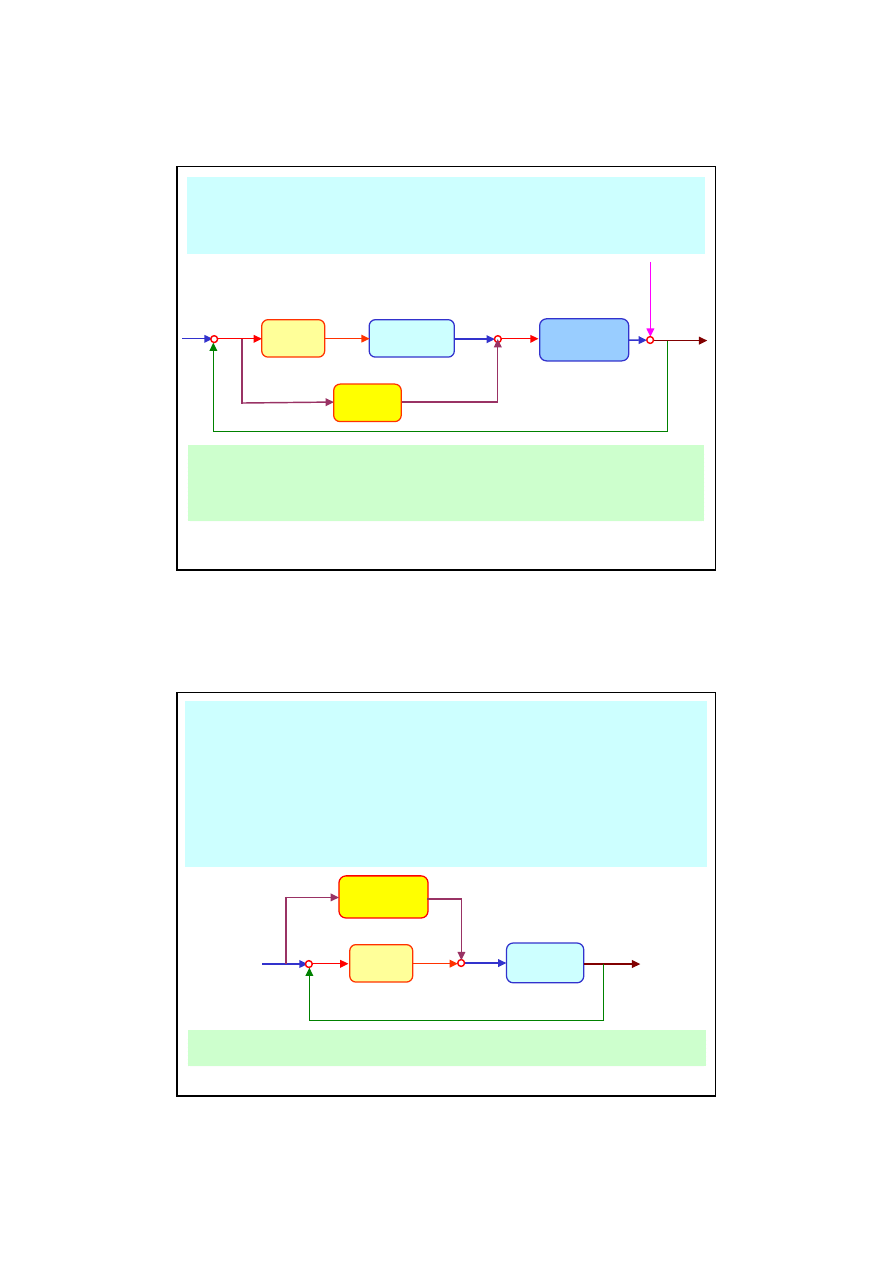
40
Regulacja z pomocnicz
ą
wielko
ś
ci
ą
nastawiaj
ą
c
ą
Regulacja z pomocnicz
ą
wielko
ś
ci
ą
nastawiaj
ą
c
ą
jest stosowana wtedy, gdy główna wielko
ść
zakłócaj
ą
ca
działa w pobli
ż
u wyj
ś
cia obiektu i mo
ż
na zbudowa
ć
drugi człon nastawiaj
ą
cy blisko wyj
ś
cia obiektu. Przez
działanie pomocniczej wielko
ś
ci nastawiaj
ą
cej blisko wyj
ś
cia obiektu mo
ż
na szybciej wyregulowa
ć
uchyb
regulacji, co staje si
ę
mo
ż
liwe w wyniku przenoszenia wielko
ś
ci nastawiaj
ą
cej u przez obiekt.
Z
a
k
łó
c
e
n
ie
Obiekt regulacji
(cz
ęść
1)
Obiekt regulacji
(cz
ęść
2)
w
u
z
y
Regulator
e
-
u
P
Regulator
pomocniczy
+
Ten rodzaj regulacji przynosi korzy
ś
ci w przypadku wyst
ę
powania zakłóce
ń
blisko wyj
ś
cia obiektu (cz
ęść
2
obiektu regulacji) i przy zmianie wielko
ś
ci zadanej.
Ze wzgl
ę
dów technologicznych lub ekonomicznych wymaga si
ę
,
ż
eby pomocnicza wielko
ść
nastawiaj
ą
ca u
p
zanikała w stanie stacjonarnym. W innym przypadku mogłaby znikn
ąć
wielko
ść
nastawiaj
ą
ca u, a jej funkcj
ę
przej
ę
łaby wielko
ść
u
P
.
Regulacja z pomocnicz
ą
wielko
ś
ci
ą
nastawiaj
ą
c
ą
Regulacja z wysterowaniem (sterowanie wyprzedzaj
ą
ce, forsowanie)
Istniej
ą
obwody regulacji, w których wyst
ę
puje konieczno
ść
zarówno dokładnego wyregulowania
zakłóce
ń
jak i wymaga si
ę
od nich tak
ż
e dokładnych przebiegów regulacji. W niektórych
przypadkach nie jest mo
ż
liwe nastawienie regulatora w jednakowym stopniu na optymalne
działanie zarówno na działanie zakłóce
ń
jak i optymalne przebiegi regulacji. W takim przypadku
nale
ż
y zapewni
ć
takie rozwi
ą
zanie układu, w którym regulator oddzielnie traktuje zakłócenia
i zmiany sygnału wielko
ś
ci zadanej.
Jest to mo
ż
liwe w układzie sterowania wyprzedzaj
ą
cego za pomoc
ą
sygnału wiod
ą
cego
(zadanego), w którym nast
ę
puje taka ingerencja w obwodzie regulacji,
ż
e dodatkowo do wej
ś
cia
obiektu regulacji jest wprowadzany sygnał zale
ż
ny od wielko
ś
ci zadanej.
Przykładem regulacji z wysterowaniem jest sterowanie pr
ę
dko
ś
ci
ą
ruchu lub przyspieszeniami
dla silników pr
ą
du stałego.
Obiekt
regulacji
Wysterowanie
w
u
y
Regulator
e
-
+
Regulacja z wysterowaniem (sterowanie wyprzedzaj
ą
ce)
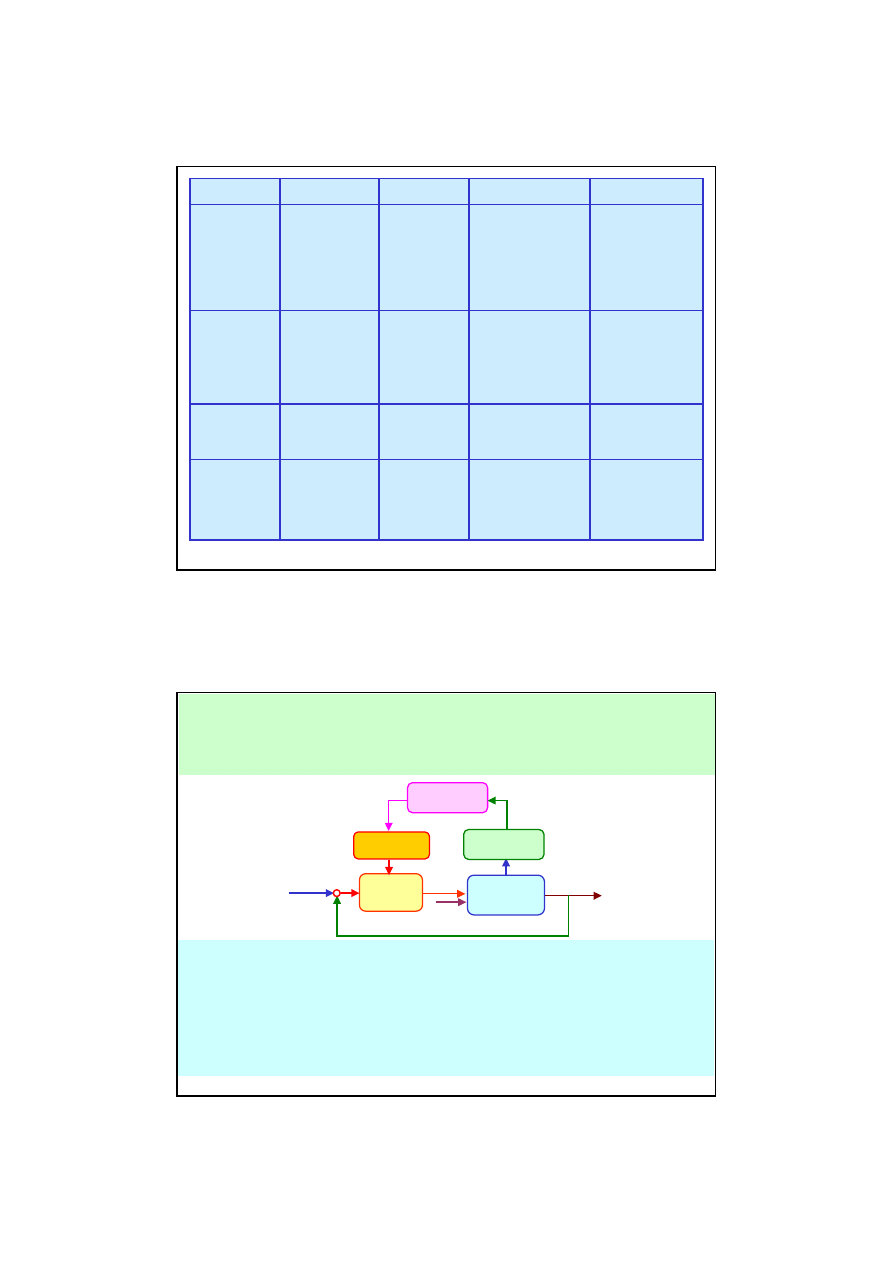
41
Porównanie wybranych zasad regulacji
Trudna
w projektowaniu
Poprawa przy
zmianach wielko
ś
ci
zadanych,
a równocze
ś
nie lepsze
działanie przy
zakłóceniach.
Wielko
ść
zadana jest
wprowadzana
bezpo
ś
rednio do
obiektu.
Dynamika obiektu
jest dokładnie
znana.
Regulacja z
wysterowaniem
Zwi
ę
kszone nakłady
Poprawa jako
ś
ci
regulacji.
Zap
ę
tlenie
obwodów
regulacji.
Istnienie wiele
(wewn
ę
trznych)
wielko
ś
ci
regulowanych.
Regulacja
kaskadowa
Wpływ głównej
wielko
ś
ci
zakłócaj
ą
cej musi by
ć
znany; konieczne s
ą
dodatkowe nakłady
zwi
ą
zane
z pomiarem.
Główna wielko
ść
zakłócaj
ą
ca nie musi
by
ć
mierzona; regulacja
jest szybsza; uchyb jest
redukowany.
Regulacja jest
odci
ąż
ona od
głównej
wielko
ś
ci
zakłócaj
ą
cej
Główna wielko
ść
zakłócaj
ą
ca jest
znana; wpływ
głównej wielko
ś
ci
zakłócaj
ą
cej jest
znany.
Regulacja z
stabilizuj
ą
c
ą
wielko
ś
ci
ą
pomocnicz
ą
Wpływ głównej
wielko
ś
ci
zakłócaj
ą
cej musi by
ć
znany; konieczne s
ą
dodatkowe nakłady
zwi
ą
zane
z pomiarem.
Regulacja jest znacznie
szybsza, a uchyb e jest
szybko redukowany.
Regulacja jest
odci
ąż
ona od
głównej
wielko
ś
ci
zakłócaj
ą
cej.
Główna wielko
ść
zakłócaj
ą
ca jest
znana i mo
ż
liwa
do pomiaru.
Znany jest wpływ
głównej wielko
ś
ci
zakłócaj
ą
cej na
obiekt.
Wł
ą
czenie
wielko
ś
ci
zakłócaj
ą
cej
Wady
Zalety
Działanie
Wymagania
Zasada
Regulacja adaptacyjna
Je
ż
eli własno
ś
ci obiektu regulacji zmieniaj
ą
si
ę
w sposób nieprzewidziany, to cz
ę
sto nie mo
ż
na uzyska
ć
wymaganych przebiegów układu regulacji i wtedy konieczne jest zastosowanie regulacji adaptacyjnej.
Jako regulacj
ę
adaptacyjn
ą
okre
ś
la si
ę
tak
ą
regulacj
ę
, w której samoczynnie zmieniaj
ą
si
ę
parametry lub
struktura regulatora w zale
ż
no
ś
ci od okre
ś
lonych własno
ś
ci obiektu, dzi
ę
ki czemu uzyskiwane s
ą
żą
dane
przebiegi regulacji.
Obiekt
regulacji
w
u
y
Regulator
e
-
Proces
decyzyjny
Modyfikacja
Identyfikacja
z
Zasada regulacji adaptacyjnej opiera si
ę
na rozpoznaniu lub identyfikacji obiektu regulacji, obliczeniu
pewnej dopasowanej do niego nastawy regulatora i odpowiedniego dopasowania parametrów regulatora.
Je
ż
eli zmienia si
ę
wzmocnienie obiektu, to przez porównanie z modelem obiektu mo
ż
na okre
ś
li
ć
wymagan
ą
korekcj
ę
(np. przez dzielenie) i wprowadzi
ć
j
ą
w członie wł
ą
czonym szeregowo (np.
mno
ż
enie) w urz
ą
dzeniu regulacyjnym i w ten sposób zapewni
ć
zachowanie stałego wzmocnienia
obwodu.
Istotnym problemem jest okre
ś
lanie zmieniaj
ą
cych si
ę
parametrów i przetwarzanie w odpowiednich
algorytmach adaptacyjnych. Wskutek tego znacznie wzrastaj
ą
nakłady zwi
ą
zane z przetwarzaniem
informacji.
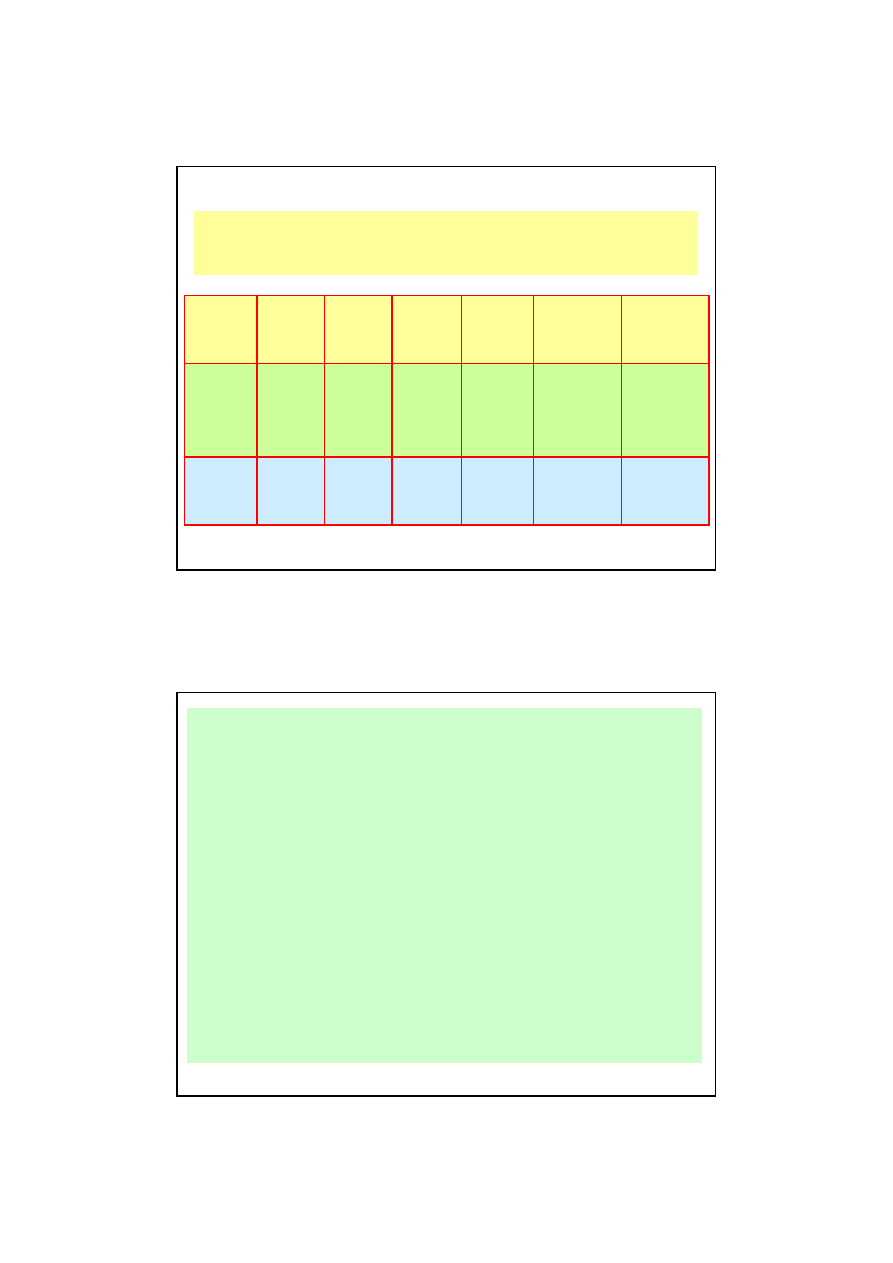
42
Porównanie sterowania z regulacj
ą
Du
ż
e
Tak (wskutek
tego równie
ż
stabilne układu
mog
ą
si
ę
sta
ć
niestabilne)
Powolne
Wszystkich
Konieczny
Tak
Regulacja
Małe
Nie (poniewa
ż
nie jest
przewidziane
do
zastosowania
w układach
niestabilnych)
Bardzo
szybkie
Tylko
znanych
Nie jest
konieczny
Nie
Sterowanie
Nakłady
obliczeniowe
(przetwarzania)
i sprz
ę
towe
Problemy ze
stabilno
ś
ci
ą
Zachowanie
w
przypadku
wyst
ą
pienia
zakłóce
ń
Eliminacja
zakłóce
ń
Pomiar
wielko
ś
ci
wyj
ś
ciowej
Sprz
ęż
enie
zwrotne
Układy sterowania maj
ą
struktur
ę
otwart
ą
(nie maj
ą
sprz
ęż
enia zwrotnego).
Natomiast układy regulacji maj
ą
struktur
ę
zamkni
ę
t
ą
z p
ę
tl
ą
sprz
ęż
enia zwrotnego
(ujemnego).
In
ż
ynieria systemów i produktów mechatronicznych w przemy
ś
le samochodowym,
obrabiarkowym czy lotniczym stosuje zwykle w odniesieniu do mechatroniki takie podej
ś
cie,
które opiera si
ę
na podsystemach (komponentach). Jest to strategia rozwoju produktu,
w której zintegrowane systemy ko
ń
cowe buduje si
ę
z technik jednorodnych podsystemów
(mechanika, elektronika, automatyka, oprogramowanie). Te podsystemy opracowuje si
ę
współbie
ż
nie, ze szczególnym uwzgl
ę
dnieniem ich interfejsów. Dopiero gdy te interfejsy s
ą
zaprojektowane, to ka
ż
dy z komponentów projektuje si
ę
w dotychczasowy, tradycyjny sposób.
Oznacza to,
ż
e punkt ci
ęż
ko
ś
ci spoczywa na multidyscyplinarnym porozumieniu si
ę
in
ż
ynierów
o ró
ż
nej specjalno
ś
ci w celu wła
ś
ciwego zdefiniowania interfejsów.
W podej
ś
ciu komponentowym nie istnieje
ż
adna potrzeba opracowania jakiej
ś
nowej techniki
jako wyniku
ś
ci
ś
lejszej integracji z pozostałymi technikami, np.
ś
cisłej integracji automatyki
z informatyk
ą
. Mo
ż
liwo
ś
ci systemu mechatronicznego s
ą
tutaj raczej wynikiem poprawnej
integracji technik istniej
ą
cych. Podej
ś
cie komponentowe dominuje w literaturze z zakresu
mechatroniki. I tak ksi
ąż
ki mechatroniczne po
ś
wi
ę
caj
ą
zwykle pierwszy rozdział zdefiniowaniu
mechatroniki, a pozostałe rozdziały poszczególnym komponentom, takim jak sensory,
aktuatory (człony wykonawcze), układ sterowania, sprz
ę
t komputerowy, interfejsy,
komunikacja, modelowanie itp.
Podej
ś
cie komponentowe jest ci
ą
gle znacz
ą
cym krokiem w stosunku do czasów, gdy
mechanicy najpierw konstruowali system mechaniczny, który nast
ę
pnie był przekazywany
automatykom w celu opracowania projektu sterowania, w tym samym czasie system
komputerowy był projektowany przez elektryków, a na koniec programistom dawano
niemo
ż
liwe do wykonania zadanie zaprojektowania i implementacji zło
ż
onego sterownika do
nieprzystosowanej konstrukcji mechanicznej i zbyt wolnego systemu komputerowego.
Podej
ś
cie komponentowe w mechatronice
43
Podej
ś
cie interakcyjne i paradygmat oprogramowania
Post
ę
p w elektronice cyfrowej otworzył nowe mo
ż
liwo
ś
ci rozwoju systemów, których podstaw
ą
s
ą
komponenty mechaniczne. Mo
ż
liwo
ś
ci te dotycz
ą
przede wszystkim ogromnego wzrostu
przepływu informacji, który mo
ż
e by
ć
wykorzystany do po
żą
danego sterowania komponentami
mechanicznymi. Mo
ż
na stwierdzi
ć
,
ż
e nast
ą
piła zmiana paradygmatu w projektowaniu tych
komponentów. Polega ona na tym,
ż
e funkcje systemu nie s
ą
ju
ż
fizycznie wbudowane
w komponent mechaniczny, lecz w oprogramowanie komputerowe. Innymi słowy nast
ę
puje
przesuni
ę
cie implementacji funkcjonalno
ś
ci z mechaniki do oprogramowania, przy czym
najwa
ż
niejsze komponenty systemu pozostaj
ą
ci
ą
gle mechaniczne. Wyst
ę
puje tutaj
paradygmat oprogramowania, a nie o paradygmat mikroelektroniki, czy paradygmat
mikroprocesora, poniewa
ż
to wła
ś
nie oprogramowanie dostarcza nowej i szerokiej elastyczno
ś
ci
oraz swobody w projektowaniu i konstruowaniu. W wielu przypadkach wła
ś
ciwe projektowanie
oprogramowania jest implementowaniem go w sprz
ę
t elektroniczny.
Stosowanie paradygmatu oprogramowania powoduje,
ż
e stare, sprawdzone teorie i poj
ę
cia
projektowania mechanicznego zast
ę
puje si
ę
młodym, niedojrzałym oprogramowaniem,
wbudowanym w młode, niedojrzałe komputery. Ma to ogromne znaczenie w tych
zastosowaniach, gdzie decyduje bezpiecze
ń
stwo. Kluczowa cecha oprogramowania, jak
ą
jest
jego ró
ż
norodno
ść
i elastyczno
ść
, łatwo prowadzi do problemów wynikaj
ą
cych z du
ż
ej
zło
ż
ono
ś
ci. In
ż
ynieria mechaniczna, in
ż
ynieria oprogramowania, in
ż
ynieria sterowania
i in
ż
ynieria komputerowa musz
ą
wi
ę
c by
ć
stosowane współbie
ż
nie i w sposób zintegrowany. Na
tej podstawie s
ą
identyfikowane, formułowane i prowadzone nowe prace. Podej
ś
cie interakcyjne
mo
ż
na wi
ę
c traktowa
ć
jako doskonalenie dotychczasowych dyscyplin, technik i ich
integracji/interakcji. Mechatronika w takim uj
ę
ciu jest wymy
ś
laniem i rozwojem nowych teorii,
modeli, poj
ęć
i narz
ę
dzi w odpowiedzi na potrzeby wyrastaj
ą
ce z interakcji dyscyplin
naukowych.
ABS jako przykład systemu mechatronicznego
Przykładem urz
ą
dzenia mechatronicznego jest stosowany powszechnie w samochodach
system zapobiegaj
ą
cy blokowaniu kół podczas hamowania na
ś
liskiej nawierzchni
ABS (niem. Antiblockierungs-System), który przyczynia si
ę
do poprawy bezpiecze
ń
stwa
jazdy.
System ABS zastosowano po raz pierwszy w 1967 r., od 1978 r. jest on produkowany
seryjnie, a od 1991 r. jest znormalizowany.
System ABS stanowił punkt wyj
ś
cia do wprowadzenia kolejnych, coraz bardziej
rozbudowanych urz
ą
dze
ń
mechatronicznych w samochodach, takich jak ASR (niem. Anti-
Schlupf-Regelung), ESP (niem. Elektronisches Stabilitätsprogramm) i VDC (ang. Vehicle
Dynamics Control).
Poniewa
ż
system ABS u
ż
ywany jest ju
ż
powszechnie, to zwykle znane jest jego
wyobra
ż
enie funkcjonalne. Kierowcy wiedz
ą
najcz
ęś
ciej,
ż
e chodzi o pulsowanie ci
ś
nienia
w układzie hamulcowym w tych przypadkach, gdy koło podczas hamowania zostanie
zablokowane.
Natomiast ogólnie mniej znana jest budowa systemu ABS, poniewa
ż
jest ona ukryta
w podwoziu samochodu i pod mask
ą
silnika. Chodzi tutaj o poszczególne jego elementy
(cz
ęś
ci, komponenty), takie jak czujniki obrotu kół, zawory elektromagnetyczne, pomp
ę
hydrauliczn
ą
, silnik elektryczny, układ elektroniczny (sterownik mikroprocesorowy), czy
przewody elektryczne i hydrauliczne.
Niektóre z tych elementów s
ą
zintegrowane w jednej obudowie (zawory, pompa, silnik,
elektronika) i przez to niedost
ę
pne gołym okiem. Dlatego te
ż
spróbujmy przedstawi
ć
istot
ę
działania układu hamulca z ABS w porównaniu ze zwykłym układem hamulcowym.
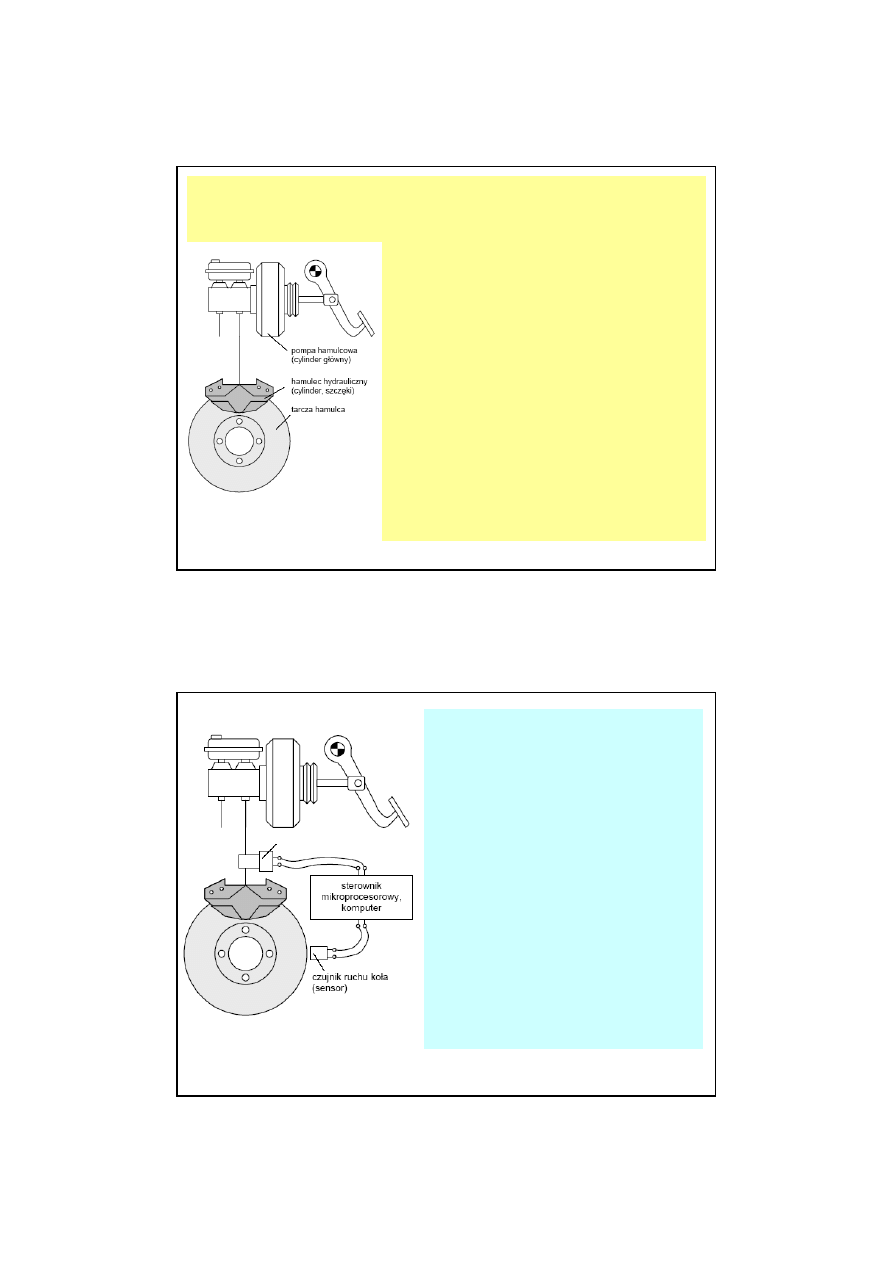
44
Zwykły hamulec hydrauliczny w samochodzie
W zwykłym tarczowym hamulcu hydraulicznym siła zaciskaj
ą
ca szcz
ę
ki (klocki) na powierzchni
tarczy hamulcowej powstaje przez działanie ci
ś
nienia cieczy na tłoczek zwi
ą
zany z jedn
ą
ze
szcz
ę
k, umieszczonych w obudowie hamulca. Ci
ś
nienie to powstaje przez przesuwanie tłoczka
pompy hamulcowej podczas naciskania na pedał hamulca.
Taki hamulec, podczas hamowania na podło
ż
u o małej
przyczepno
ś
ci (
ś
liskim, piaszczystym), szybko zatrzymuje
(blokuje) koło. Mała przyczepno
ść
powoduje zmniejszenie
momentu hamowania, a wi
ę
c szybkie zatrzymanie koła.
Przestaje si
ę
ono obraca
ć
wokół własnej osi, a z kolei
mała przyczepno
ść
powoduje,
ż
e samochód nie reaguje
wła
ś
ciwie na próby zatrzymania i staje si
ę
niesterowalny.
Siła bezwładno
ś
ci niesie go w dotychczasowym kierunku
jazdy, a nie w kierunku zgodnym z zamiarami kierowcy,
wynikaj
ą
cym ze skr
ę
cenia kierownicy.
Rozwi
ą
zaniem tego problemu jest przeciwdziałanie
blokowaniu. Mo
ż
na to uzyska
ć
przez szybk
ą
(kilkadziesi
ą
t
razy na sekund
ę
) pulsacj
ę
ci
ś
nienia hamowania od chwili,
gdy koło przestało si
ę
obraca
ć
. Tak szybkiej pulsacji
człowiek nie jest jednak w stanie wytworzy
ć
swoj
ą
nog
ą
,
a ponadto nie jest w stanie bezpo
ś
rednio wyczu
ć
chwili
zablokowania koła. Siły i ruchy człowieka oraz reakcje jego
zmysłów s
ą
zbyt powolne w stosunku do dynamiki
zjawiska, nad którym musi zapanowa
ć
. Dlatego musi go
w tym wyr
ę
czy
ć
urz
ą
dzenie techniczne.
W systemie ABS układ hamulcowy jest
rozszerzony o trzy funkcje:
• funkcj
ę
„wyczuwania” chwili zablokowania koła.
Realizatorem (no
ś
nikiem) tej funkcji jest czujnik
(sensor) ruchu tarczy hamulcowej (koła),
• funkcj
ę
szybkiego pulsowania ci
ś
nienia płynu
hamulcowego. No
ś
nikiem tej funkcji jest
urz
ą
dzenie wykonawcze (aktuator) w postaci
szybko wył
ą
czanego i wł
ą
czanego zaworu
elektromagnetycznego,
• funkcj
ę
odbierania i oceniania sygnałów z
czujnika oraz szybkiego naprzemiennego
wł
ą
czania i wył
ą
czania (sterowania) zaworu
elektromagnetycznego. No
ś
nikiem tej funkcji
jest sterownik w postaci mikroprocesora,
mikrokontrolera lub mikrokomputera.
Dalszy rozwój systemów ABS jest zwi
ą
zany
z działaniami maj
ą
cymi na celu skrócenie drogi
hamowania, co mo
ż
na osi
ą
gn
ąć
przez
zwi
ę
kszenie szybko
ś
ci reakcji elementów
układu hamulcowego.
ABS jako przykład systemu mechatronicznego
zawór elektromagnetyczny do
modulacji ci
ś
nienia (aktuator)
45
Mi
ę
dzy XVII a XIX wiekiem powstało wiele wa
ż
nych urz
ą
dze
ń
(np. regulatory temperatury, regulatory ci
ś
nienia
oraz mechaniczne maszyny licz
ą
ce), na których mo
ż
na prze
ś
ledzi
ć
wkład do rozwoju automatyki i mechatroniki.
Milowym krokiem był tu od
ś
rodkowy regulator Watt’a do regulacji pr
ę
dko
ś
ci maszyny parowej. Przez pomiar
pr
ę
dko
ś
ci obrotowej wału wyj
ś
ciowego i u
ż
ycie ruchu obrotowego kul do sterowania zaworem odbywało si
ę
sterowanie ilo
ś
ci
ą
pary wpływaj
ą
cej do silnika. Gdy pr
ę
dko
ść
silnika rosła, to kule aparatu ruchowego podnosiły
si
ę
, poci
ą
gaj
ą
c za sob
ą
kołnierz z ci
ę
gnami, które zamykały zawór pary. Jest to przykład systemu sterowania ze
sprz
ęż
eniem zwrotnym (ang. feedback), w którym sygnał sprz
ęż
enia zwrotnego (sensoryka) i działanie steruj
ą
ce
(aktuatoryka) s
ą
realizowane całkowicie przez urz
ą
dzenia mechaniczne (ang. mechanical hardware).
Dalszy etap rozwoju automatyzacji wymagał opracowania teorii sterowania automatycznego. Prekursorem
sterowanych numerycznie (NC) obrabiarek do zautomatyzowanego wytwarzania (opracowanych w połowie XX
w.) było wynalezione ponad sto lat wcze
ś
niej krosno Jackard’a ze sprz
ęż
eniem uprzedzaj
ą
cym (ang.
feedforward). Pod koniec XIX w. Maxwell przez analiz
ę
układu równa
ń
ró
ż
niczkowych opisuj
ą
cych regulator
od
ś
rodkowy, zainicjował rozwój teorii sterowania. W latach 30. XIX w. Faraday opisał prawa indukcji, b
ę
d
ą
ce
podstaw
ą
działania silnika elektrycznego i pr
ą
dnicy elektrycznej. Nast
ę
pnie w latach 80. XIX w. Tesla wynalazł
silnik indukcyjny pr
ą
du przemiennego.
Rozwój automatyzacji znacznie przyspieszył w XX w. I tak opracowanie pneumatycznych elementów sterowania
w latach 30. XX w. dojrzało do zastosowa
ń
w przemysłach procesowych. Jednak a
ż
do 1940 r. projektowanie
systemów sterowania odbywało si
ę
metod
ą
prób i bł
ę
dów. Post
ę
p w zakresie metod matematycznych
i analitycznych, jaki miał miejsce w latach 40. ubiegłego wieku, doprowadził do powstania in
ż
ynierii sterowania
(automatyki) jako niezale
ż
nej dyscypliny in
ż
ynierskiej. Szczególnie istotny post
ę
p w teorii i praktyce sterowania
automatycznego (np. pilot automatyczny, systemy pozycjonowania dział czy sterowania antenami radarów)
osi
ą
gni
ę
to w okresie II Wojny
Ś
wiatowej. Po wojnie zacz
ę
ły dominowa
ć
techniki dziedziny cz
ę
stotliwo
ś
ciowej,
rosło zastosowanie transformaty Laplace’a i projektowanie systemów sterowania za pomoc
ą
miejsc
biegunowych.
W USA rozwój systemów telefonicznych i elektronicznych wzmacniaczy ze sprz
ęż
eniem zwrotnym zach
ę
ciły
Bode’go, Nyquist’a i Black’a do u
ż
ycia sprz
ęż
enia zwrotnego w laboratoriach Bella. Działanie wzmacniaczy ze
sprz
ęż
eniem zwrotnym zostało opisane w dziedzinie cz
ę
stotliwo
ś
ci, a powstałe z tego praktyki projektowania
i analizy s
ą
dzi
ś
klasyfikowane jako „sterowanie klasyczne”. W latach 60. XX w. nast
ą
pił rozwój modeli
w dziedzinie czasu za pomoc
ą
reprezentacji w postaci zmiennych stanu.
Rys historyczny rozwoju automatyki i automatyzacji
W obszarze komercyjnym, gdzie niskie koszty osi
ą
ga si
ę
dzi
ę
ki produkcji masowej, automatyzacja
procesu produkcji stawała si
ę
najwy
ż
szym priorytetem. W latach 50. XX w. zastosowanie krzywek,
mechanizmów wieloczłonowych i nap
ę
dów ła
ń
cuchowych spowodowało wprowadzenie nowych
technologii produkcji. Przykładem tego s
ą
maszyny włókiennicze, drukarskie i papiernicze, a tak
ż
e
maszyny do szycia. Rzeczywisto
ś
ci
ą
stało si
ę
precyzyjne wytwarzanie masowe. I tak np.
automatyczna maszyna do wytwarzania pudełek papierowych wykonywała 200 pudełek na minut
ę
i nie zawierała
ż
adnego niemechanicznego podsystemu poza silnikiem elektrycznym.
Rozwój mikroprocesorów w ko
ń
cu lat 60. XX w. doprowadził do powstania pierwszych
komputerowych układów sterowania w maszynach wytwórczych. Przykładem tego s
ą
obrabiarki
sterowane numerycznie (NC) i systemy sterowania samolotów. Procesy wytwarzania były jednak
nadal w swej naturze całkowicie mechaniczne, a systemy sterowania i automatyzacji
wbudowywano dopiero po wykonaniu maszyny. Nowym impulsem w rozwoju sterowanych
systemów mechatronicznych było wystrzelenie sputnika i nadej
ś
cie ery kosmicznej. Rakiety i sondy
kosmiczne wymusiły rozwój zło
ż
onych, wysoce dokładnych systemów sterowania. Konieczno
ść
minimalizacji masy satelity (to znaczy minimalizacji ilo
ś
ci paliwa pobieranego dla misji), przy
zapewnianiu dokładnego sterowania, zach
ę
ciła do post
ę
pów w wa
ż
nym obszarze sterowania
optymalnego. Rozwój wytwarzania półprzewodników i obwodów scalonych doprowadził do
powstania nowej klasy produktów. Mechanika i elektronika zacz
ę
ły zlewa
ć
si
ę
w jeden system,
w którym obie dyscypliny s
ą
wymagane ze wzgl
ę
dów funkcjonalnych.
Dla takich systemów firma Yaskawa wprowadziła w 1969 r. termin „mechatronika”. Firmie tej został
przyznany znak handlowy w 1972 r., ale po upowszechnieniu si
ę
terminu firma pozbyła si
ę
znaku
w 1982 r. Na pocz
ą
tku mechatronika odnosiła si
ę
tylko do systemów zawieraj
ą
cych systemy
mechaniczne z komponentami elektronicznymi, bez
ż
adnego sterowania komputerowego.
Przykładami takich systemów były drzwi automatyczne przesuwane, maszyny sprzedaj
ą
ce,
otwieracze drzwi gara
ż
owych.
Rys historyczny rozwoju automatyki i automatyzacji
46
System techniczny jest okre
ś
lany jako zwarty układ, który umo
ż
liwia u
ż
ytkownikowi celowy przebieg
i sterowanie procesu technicznego. Ma on wyra
ź
ne granice z otoczeniem, które mog
ą
przekracza
ć
tylko
wielko
ś
ci wej
ś
ciowe i wyj
ś
ciowe w postaci przepływu materiałów, energii i informacji wzgl. sygnałów.
Wewn
ą
trz tych granic mo
ż
na wydzieli
ć
podsystemy (komponenty, składniki), które s
ą
powi
ą
zane
przepływem materiałów, energii i sygnałów.
Systemy mechatroniczne s
ą
systemami technicznymi. Stanowi
ą
one dalszy rozwój klasycznych układów
mechanicznych w wielu stopniach. W pierwszym stopniu realizacja funkcji odbywała si
ę
w sposób
czysto mechaniczny za pomoc
ą
składników mechanicznych. Potrzebna do tego celu energia była
dostarczana np. w postaci siły mi
ęś
ni. Nast
ę
pnym stopniem rozwoju były układy elektromechaniczne,
które miały dodatkowo zintegrowane rozwi
ą
zania i składniki elektryczne, aby wspomaga
ć
mechanik
ę
.
Najcz
ęś
ciej odzwierciadlało si
ę
to zastosowaniem energii elektrycznej, np. nap
ę
dów elektrycznych, do
realizacji funkcji. W trzecim stopniu układ elektromechaniczny został uzupełniony i rozszerzony
o elektronik
ę
. Analogowe i cyfrowe obwody przepływu sygnałów steruj
ą
funkcjami. Obecne systemy
mechatroniczne s
ą
czwartym stopniem tego rozwoju. Zintegrowane przetwarzanie informacji jest
realizowane przez mikroprocesory i oprogramowanie.
Systemy mechatroniczne daj
ą
charakterystyczn
ą
struktur
ę
wyrobów. Składaj
ą
si
ę
one z cz
ęś
ci
mechanicznej (struktura podstawowa), aktuatorów, sensorów i przynajmniej jednego układu
mikroprocesorowego z oprogramowaniem do przetwarzania informacji. Układy elektryczne i elektroniczne
oraz informatyczne uzupełniaj
ą
podstawow
ą
struktur
ę
mechaniczn
ą
. Nieograniczona funkcjonalno
ść
całego systemu jest uzyskiwana przez współdziałanie wszystkich składników. Realizacja funkcjonalno
ś
ci
przez poszczególne składniki nie jest mo
ż
liwa. Mikroprocesor odgrywa przy tym centraln
ą
rol
ę
. Czujniki
mierz
ą
wielko
ś
ci stanu systemu i otoczenia. S
ą
one nast
ę
pnie przetwarzane za pomoc
ą
oprogramowania
i elektroniki cyfrowej. Dzi
ę
ki algorytmom steruj
ą
cym i regulacyjnym s
ą
okre
ś
lane konieczne oddziaływania
na układ mechaniczny i przekazywane w postaci sygnałów nastawiaj
ą
cych do aktuatorów. Aktuatory
przetwarzaj
ą
te sygnały w celowe ruchy i oddziałuj
ą
na układ mechaniczny i tym samym wielko
ś
ci stanu.
Zatem typowy system mechatroniczny przyjmuje sygnały, przetwarza je i przekazuje dalej sygnały, które
nast
ę
pnie s
ą
zamieniane np. w siły i ruchy.
Systemy mechatroniczne
W ko
ń
cu lat 70. XX w. Japo
ń
skie Towarzystwo Przemysłu Maszynowego (JSPMI) sklasyfikowało
produkty mechatroniczne w cztery kategorie:
1. Klasa I: Pierwotnie mechanicznie produkty z elektronik
ą
wbudowan
ą
w celu rozszerzenia
funkcjonalno
ś
ci. Przykłady: obrabiarki sterowane numerycznie, nap
ę
dy o zmiennej pr
ę
dko
ś
ci
w maszynach wytwórczych.
2. Klasa II: Tradycyjne systemy mechaniczne z istotnie udoskonalonymi urz
ą
dzeniami
wewn
ę
trznymi, zawieraj
ą
cymi elektronik
ę
. Przykłady: nowoczesna maszyna do szycia,
zautomatyzowane systemy wytwórcze.
3. Klasa III: Systemy z zachowan
ą
funkcjonalno
ś
ci
ą
tradycyjnych systemów mechanicznych, ale
z elektronik
ą
w miejsce wewn
ę
trznych mechanizmów. Przykład: zegarek cyfrowy.
4. Klasa IV: Produkty zaprojektowane przez synergiczn
ą
integracj
ę
techniki mechanicznej
i elektronicznej. Przykłady: fotokopiarki, inteligentne pralki i suszarki, garnki do gotowania ry
ż
u,
piece automatyczne.
Pojawiaj
ą
ce si
ę
nowoczesne technologie dla ka
ż
dej klasy produktu mechatronicznego ilustruj
ą
wzrost
produktów elektromechanicznych w tempie odpowiadaj
ą
cym rozwojowi teorii sterowania, technologii
informacyjnej i mikroprocesorów. Produkty klasy I były mo
ż
liwe dzi
ę
ki technice serwomechanizmów,
elektronice mocy i teorii sterowania. Produkty klasy II - dzi
ę
ki dost
ę
pno
ś
ci wczesnych urz
ą
dze
ń
do
obliczania i zapami
ę
tywania oraz dzi
ę
ki mo
ż
liwo
ś
ciom projektowania obwodów na zamówienie.
Produkty klasy III polegały głównie na mikroprocesorach i obwodach scalonych zast
ę
puj
ą
cych systemy
mechaniczne. Produkty klasy IV dały pocz
ą
tek prawdziwym systemom mechatronicznym, przez
integracj
ę
systemów mechanicznych i elektroniki. Nie miało to miejsca do lat 70. XX w., od kiedy to wraz
z rozwojem konstrukcji mikroprocesora przez firm
ę
Intel, praktyk
ą
stała si
ę
integracja systemów
komputerowych w systemy mechaniczne.
Klasy systemów mechatronicznych
47
Podział na sterowanie konwencjonalne i sterowanie nowoczesne został znacznie
zredukowany w latach 80. XX w. wraz z nadej
ś
ciem teorii sterowania „krzepkiego” (ang.
robust control theory). Obecnie na ogół akceptuje si
ę
taki stan,
ż
e in
ż
ynieria sterowania
w analizie i projektowaniu systemów sterowania musi si
ę
zajmowa
ć
jednocze
ś
nie
obydwoma podej
ś
ciami, tzn. podej
ś
ciem w dziedzinie czasu i podej
ś
ciem w dziedzinie
cz
ę
stotliwo
ś
ci. Ponadto zastosowanie komputerów jako integralnych komponentów
systemów sterowania, stało si
ę
rutyn
ą
. Dzi
ę
ki temu miliony zainstalowanych
mikrokomputerów słu
ż
y do cyfrowego sterowania procesami. Bez wzgl
ę
du na to, jak
ą
definicj
ę
mechatroniki przyjmiemy, zawsze jest oczywiste,
ż
e nowoczesna mechatronika
zawiera komputer jako element centralny systemu. A to dlatego,
ż
e istot
ą
urz
ą
dze
ń
mechatronicznych jest zastosowanie mikroprocesora do precyzyjnego modulowania
energii mechanicznej. To precyzyjne modulowanie energii słu
ż
y ogólnej funkcji
urz
ą
dzenia mechatronicznego – dopasowaniu (adaptowaniu) do zmian procesu (jaki
urz
ą
dzenie realizuje) i do zmian otoczenia (w jakim urz
ą
dzenie pracuje). Poniewa
ż
dopasowanie jest jedn
ą
z cech inteligencji, to urz
ą
dzenia mechatroniczne nazywa si
ę
cz
ę
sto zaawansowanymi (inteligentnymi) (ang. intelligent) lub zmy
ś
lnymi (ang. smart).
Nale
ż
y tak
ż
e wspomnie
ć
o nowej dyscyplinie jak
ą
jest adaptronika, która wła
ś
nie
dopasowywanie uczyniła sw
ą
istot
ą
. W szerokim uj
ę
ciu mechatronika i adaptronika
wydaj
ą
si
ę
dwiema stronami tego samego medalu. O ile mechatronika jest nazw
ą
strukturaln
ą
, o tyle adaptronika jest nazw
ą
funkcjonaln
ą
. Ta pierwsza wskazuje z czego
urz
ą
dzenie jest zbudowane, druga za
ś
– po co jest budowane. W tym kontek
ś
cie
nale
ż
ałoby wspomnie
ć
o jeszcze strukturotronice, usiłuj
ą
cej zajmowa
ć
si
ę
inteligentnymi strukturami konstrukcyjnymi.
Mechatronika, adaptronika i strukturotronika
Je
ż
eli układy elektroniczne s
ą
stosowane po to, aby zoptymalizowa
ć
działania zespołów mechanicznych
(np. w maszynie lub poje
ź
dzie), to mówi si
ę
obecnie o systemie mechatronicznym. Działanie elektroniki
jest przy tym okre
ś
lone przez oprogramowanie. Wa
ż
ne jest przy tym to,
ż
e
żą
dany wynik mo
ż
na
uzyska
ć
tylko przez wspólne działanie zespołów mechanicznych, elektronicznych i oprogramowania.
System mechatroniczny składa si
ę
z czterech nast
ę
puj
ą
cych cz
ęś
ci:
mechanicznych, które wykonuj
ą
okre
ś
lone zadania (np. obróbka przedmiotów lub transportowanie),
elektronicznego sterowania lub regulacji, zwykle mikrokomputer lub procesor sygnałowy
z odpowiednim oprogramowaniem,
aktuatoryki, która przetwarza sygnały elektroniczne na wielko
ś
ci mechaniczne (siła, moment
obrotowy),
sensoryki, które okre
ś
laj
ą
stan zespołów mechanicznych (pr
ę
dko
ść
, przyspieszenie, poło
ż
enie)
i przekazuj
ą
je do urz
ą
dze
ń
elektronicznych.
Mechatronika odgrywa wa
ż
n
ą
rol
ę
wtedy, gdy optymalizacja działania (procesów) jest realizowana przez
oprogramowanie. Przykładami tego s
ą
samochody, w których stosowane s
ą
układy elektronicznej
regulacji silnika, system ABS, elektroniczna stabilizacja toru jazdy ESP. Obecnie coraz wi
ę
kszego
znaczenia nabiera nap
ę
d hybrydowy, który umo
ż
liwia oszcz
ę
dno
ść
paliwa.
Bez systemów mechatronicznych, których działanie jest oparte na oprogramowaniu, bezpiecze
ń
stwo
i komfort jazdy w samochodach byłyby obecnie znacznie ni
ż
sze, a zu
ż
ycie paliwa wi
ę
ksze. Szacuje
si
ę
,
ż
e obecnie prawie 80% potencjału ulepsze
ń
w samochodach zawiera si
ę
w elektronice i tym
samym wykorzystaniu systemów mechatronicznych.
Sytuacja w budowie maszyn jest podobna – obecnie wiele maszyn nie jest w stanie spełnia
ć
swoich
zada
ń
bez elektronicznego sterowania. Jednak w budowie maszyn nie ma zwykle jeszcze tak
zaawansowanej interdyscyplinarnej współpracy jak w budowie samochodów.
Rozwój systemów mechatronicznych
48
Etapy rozwojowe na drodze do multi-technologicznych
systemów
Wcze
ś
niej:
Wcze
ś
niej:
rozpatrywanie systemowe poszczególnych technologii, kooperacja jednostek
Obecnie:
Obecnie:
integracja ró
ż
norodnych obszarów technologii (mechatronika)
W przyszło
ś
ci:
W przyszło
ś
ci:
technologiczna miniaturyzacja i „stopienie” obszarów technologii (adaptronika, nanotechnika)
Wraz z post
ę
pem techniki i szybkim rozwojem sprz
ę
tu komputerowego i komunikacji sieciowej systemy
mechatroniczne s
ą
w coraz wi
ę
kszym stopniu wyposa
ż
ane w procesory, elektronik
ę
, czujniki i aktuatory.
Coraz wy
ż
szy stopie
ń
integracji i coraz silniejsze poł
ą
czenie sieci
ą
ze sob
ą
ró
ż
norodnych komponentów
prowadz
ą
do wzrostu zło
ż
ono
ś
ci systemów. Charakteryzuj
ą
si
ę
one wieloma interfejsami z ich
otoczeniem, w tym tak
ż
e z człowiekiem, co wymaga uwzgl
ę
dnienia tego,
ż
e obsługa, sterowanie
i nadzorowanie nie zawsze musz
ą
by
ć
niezawodne. Wysokie wymagania dotycz
ą
ce niezawodno
ś
ci
maszyn, urz
ą
dze
ń
, pojazdów i instalacji, ich sterowania, regulacji, nadzorowania, urz
ą
dze
ń
bezpiecze
ń
stwa i interakcji człowiek-maszyna powoduj
ą
konieczno
ść
rozwoju odpowiednich metod
i technik do analizy niezawodno
ś
ci. Je
ż
eli jeszcze przed kilkoma laty były rozpatrywane oddzielnie
współpracuj
ą
ce ze sob
ą
poszczególne jednostki ka
ż
dego z obszarów technologicznych, to obecnie
w systemach mechatronicznych jest coraz wi
ę
ksza integracja komponentów z zaz
ę
biaj
ą
cych si
ę
ze sob
ą
obszarów technologicznych (mechanika, elektrotechnika, elektronika, sensoryka, aktuatoryka, systemy
wbudowane oraz rozproszone komputery/ sterowniki). Aktualne prace badawcze i rozwojowe pod hasłem
„adaptronika” prowadzone s
ą
ju
ż
dalej w kierunku miniaturyzacji technologicznej a
ż
do „stopienia si
ę
”
poszczególnych obszarów technologicznych. Rozpatrywane dotychczas oddzielnie, technologicznie
ró
ż
norodne podsystemy do oceny niezawodno
ś
ci musz
ą
by
ć
rozpatrywane, projektowane, zestawiane
i optymalizowane cało
ś
ciowo i w sposób odniesiony do systemu.
Historyczny rozwój
systemów
mechanicznych,
elektrycznych
i elektronicznych
Czyste układy mechaniczne
Systemy mechaniczne z nap
ę
dami
elektrycznymi
Systemy mechaniczne ze sterowaniem:
- elektronicznym (analogowym),
- sekwencyjnym.
Systemy mechaniczne ze sterowaniem
automatycznym
←
silnik pr
ą
du stałego 1870 r.
←
silnik pr
ą
du przemiennego 1889 r.
Systemy mechaniczne ze sterowaniem:
- ci
ą
głym (cyfrowym),
- sekwencyjnym cyfrowym.
Systemy mechatroniczne:
- integracja mechaniki i elektroniki,
- oprogramowanie okre
ś
la funkcje,
- efekty synergiczne.
<1900 r.
←
cewki, przeka
ź
niki
←
wzmacniacze hydrauliczne,
zz
pneumatyczne i elektryczne
←
regulatory PI, 1930 r.
1920 r.
←
tranzystor 1948 r.
←
tyrystor 1955 r.
1935 r.
1955 r.
←
komputer cyfrowy 1955 r.
←
komputer procesowy 1959 r.
←
oprogramowanie czasu rzeczywistego 1966 r.
←
mikrokomputer 1971 r.
←
cyfrowa zdecentralizowana automatyzacja 1959 r.
←
mikrokontroler 1978 r.
←
komputery osobiste 1980 r.
←
systemy proces/magistrala
←
nowe człony wykonawcze (aktuatory), sensory
←
integracja komponentów
1975 r.
1985 r.
silnik parowy 1860
pr
ą
dnica pr
ą
du stałego 1870
pompa wirowa 1880
silnik spalinowy 1880
mechaniczna maszyna do pisania
obrabiarki
pompy
elektryczna maszyna do pisania
turbiny parowe
lotnictwo
windy sterowane elektrycznie
obrabiarki
roboty przemysłowe
zakłady przemysłowe
nap
ę
dy dysków
roboty mobilne
komputerowa integracja
wytwarzania (CIM)
ło
ż
yska magnetyczne
automatyzacja pojazdów
(ABS, ESP)
Rozwój urz
ą
dze
ń
elektrycznych
Rozwój systemów
automatyki
Rozwój systemów
sterowanych
komputerowo,
miniaturyzacja
systemów
49
Wybrane przykłady konstrukcji technicznych i standardów
• pompy elektryczne
• elektryczna maszyna do pisania
• wzmacniacze elektryczne, pneumatyczne i hydrauliczne
• regulator PI, 1930
• turbiny parowe
• samolot braci Wright, 1903
• komputer Mark I Colossus, Anglia, 1943
• tranzystor (1948), tyrystor, 1955
1920 ...
• sterowanie maszyn
ą
tkack
ą
, Jacquard, 1805
• generator elektryczny pr
ą
du zmiennego, Pixii, 1832
• telegraf elektromagnetyczny, Morse, 1837
• silnik spalinowy, Lenoir, 1860
• silnik elektryczny, 1870
• tłumienie drga
ń
pomieszcze
ń
na statku, Bessemer, 1874
• elektryczne nap
ę
dy: transport i przemysł, Siemens, 1879
• koncepcja regulatora PID dla statku, Minorskij, 1885
• silnik pr
ą
du zmiennego, Tesla, 1889
XIX w. n.e.
• regulator obrotów wiatraka, Lee 1745
• maszyna parowa, Watt 1765
• regulator Watta, 1769
XVIII w. n.e.
• ci
ś
nieniowy zawór bezpiecze
ń
stwa, Papin 1681
XVII w. n.e.
• stabilizacja poziomu cieczy w zegarze wodnym, Ktesibos
• stabilizacja poziomu cieczy w lampie oliwnej, Philon
III w. p.n.e.
• standard IEC1131: model programowy, komunikacyjny oraz
programowanie w j
ę
zykach tekstowych i graficznych, 1993
• OPC (OLE for Process Control) - standard mechanizmu komunikacji
pomi
ę
dzy
ź
ródłami danych w systemach wytwarzania, 1997
1990 ...
• systemy mechatroniczne z synergi
ą
• roboty mobilne
• systemy hamowania ABS
• grafika komputerowa, systemy CAD/CAM, CAE
1985 ...
• mikrokomputer, 1971
• cyfrowe sterowanie rozproszone, 1975
• Intel 8080 w sterowniku produkcji Allan Bradley, USA, 1977
• mikrosterownik, 1978
• komputer IBM PC, 1979
1970 ...
• sterowanie komputerowe procesem polimeryzacji w TEXACO Port Artur,
USA, 1959
• laser, Maiman 1960
• sterowanie komputerem Ferranti Argus w ICI, Anglia, 1962
• modułowy minikomputer do sterowania, MODICON 084, 1969
1959 - 70
Wybrane przykłady konstrukcji technicznych i standardów c.d.
50
Mechatronika jest te
ż
trendem w interdyscyplinarnym podej
ś
ciu do procesu
projektowania, który rozpocz
ą
ł si
ę
wiele lat temu (p. tabele z poprzednich slajdów) i ze
wzgl
ę
du na
żą
dania rynku rozwin
ą
ł si
ę
dynamicznie w latach osiemdziesi
ą
tych XX w.
W tym okresie Japonia oraz Stany Zjednoczone stanowiły dwa przoduj
ą
ce kraje
w dziedzinie zastosowa
ń
mechatroniki. Wykorzystanie zaawansowanych technologii
i nowatorskie podej
ś
cie w okre
ś
laniu funkcji nowego wyrobu mo
ż
e istotnie zwi
ę
kszy
ć
szans
ę
sukcesu na rynku, ale wymaga interdyscyplinarnego podej
ś
cia przy
projektowaniu wyrobu i opracowaniu technologii jego produkcji. Pojawienie si
ę
łatwo
dost
ę
pnych i tanich mikroprocesorów było istotnym warunkiem ich zastosowania na
szerok
ą
skal
ę
zarówno w urz
ą
dzeniach przemysłowych, jak i w wyrobach
mechatronicznych powszechnego u
ż
ytku (magnetowidy kasetowe, odtwarzacze CD,
pralki „fuzzy” z mikroprocesorowym programatorem).
Istot
ą
mechatroniki jest interdyscyplinarne podej
ś
cie do projektowania ju
ż
na etapie
przygotowania specyfikacji wymaga
ń
wyrobu. Te działania s
ą
wspierane przez
wykorzystanie odpowiedniego oprogramowania, w tym narz
ę
dzi CAD/CAM, CAE
i CASE (ang. Computer Aided System Engineering). Narz
ę
dzia CASE istotnie
zwi
ę
kszaj
ą
efektywno
ść
i produktywno
ść
projektantów, pozwalaj
ą
c na odpowiedni
ą
organizacj
ę
pracy zespołowej i skrócenie czasu tworzenia ko
ń
cowego produktu.
Ułatwiaj
ą
te
ż
wprowadzenie zarz
ą
dzania jako
ś
ci
ą
oraz identyfikacj
ę
odpowiedzialno
ś
ci, zgodnie z normami ISO 9000.
System komputerowo wspomaganego projektowania w rozwoju systemów
mechatronicznych musi uwzgl
ę
dnia
ć
wszystkie etapy procesu projektowania,
interdyscyplinarno
ść
konstrukcji, jak równie
ż
powinien przykłada
ć
szczególn
ą
wag
ę
do procesu budowy i badania wirtualnego prototypu.
Systemy mechatroniczne
OBIEKTY MECHATRONICZNE
OBIEKTY MECHATRONICZNE
Urz
ą
dzenia (układy)
Urz
ą
dzenia (układy)
Systemy
Systemy
Aktuatory (elementy
wykonawcze)
Aparat słuchowy
Urz
ą
dzenia
peryferyjne
Czujniki (sensory)
Mikroprocesory
Magistrale
Robot-piesek AIBO
Robot
Obrabiarka z komputerowym
sterowaniem numerycznym
Wie
ż
owiec w strefie sejsmicznej
z aktywnym tłumieniem drga
ń
Aktywne zawieszenie pojazdu
ABS, ASR, EPS, VDC, ...
Silnik spalinowy z „common rail”
Twardy dysk
Inne obiekty, maszyny, budowle,
budynki, instalacje, aparaty,
przyrz
ą
dy, narz
ę
dzia, zabawki itp.
Przykłady urz
ą
dze
ń
i systemów mechatronicznych
51
Perspektywy rozwoju urz
ą
dze
ń
mechatronicznych
Dalszy rozwój mechatroniki b
ę
dzie si
ę
odbywał coraz bardziej w kierunku urz
ą
dze
ń
„inteligentnych”. Wzrasta
ć
b
ę
dzie znaczenie oprogramowania i algorytmów. Konkretne
przetworzenie „inteligentnie” zaplanowanych akcji b
ę
dzie wymaga
ć
rozszerzenia zdolno
ś
ci
ruchowych. Na znaczeniu zyska mikrotechnika. Przyszłe zastosowania mechatroniki mo
ż
na
podzieli
ć
na nast
ę
puj
ą
ce:
mechatronizowanie urz
ą
dze
ń
konwencjonalnych we wszystkich zwykłych obszarach ich
u
ż
ytkowania w celu zwi
ę
kszenia osi
ą
gów, uproszczenia mechanizmów i obni
ż
enia kosztów,
w obszarach, w których człowiek w ogóle nie mo
ż
e pracowa
ć
lub sam nie mo
ż
e pracowa
ć
, np.
w nanoobszarach, pod wod
ą
, pod ziemi
ą
i w przestrzeni kosmicznej. Roboty i inne urz
ą
dzenia
mechatroniczne b
ę
d
ą
wspiera
ć
ludzi w pracach, które s
ą
niebezpieczne lub nieprzyjemne.
Chodzi tu przede wszystkim o ci
ęż
kie prace w budownictwie, zadania nadzorcze
w elektrowniach i instalacjach chemicznych, prace konserwacyjne w kanalizacji, sortowanie
odpadów, zadania w słu
ż
bie ratowniczej z automatycznymi aparatami lataj
ą
cymi dla celów
ratowniczych i ga
ś
niczych.
w obszarach, gdzie nie wystarcza zr
ę
czno
ść
człowieka, jego wytrwało
ść
, zdolno
ść
koncentracji
czy niezawodno
ść
; np. w technice operacji chirurgicznych (chirurgia małoinwazyjna), operacjach
oczu, przemysłowej technice monta
ż
u, mikrotechnice. Do tego nale
ż
y zaliczy
ć
zastosowanie
robotów jako pomocy w rehabilitacji medycznej w celu odtworzenia ograniczonych mo
ż
liwo
ś
ci
ruchowych i zachowania przez człowieka niezale
ż
no
ś
ci fizycznej.
w obszarach rozrywki i zabawy. Natura ludzka raduje si
ę
zwykle czym
ś
nowym
i niespodziewanym. Dlatego roboty i inne urz
ą
dzenia mechatroniczne spotyka si
ę
jako
przedmioty zabawy, jako zabawki, jako co
ś
co
ś
ci
ą
ga na siebie spojrzenie. Poniewa
ż
niezawodno
ść
i cena nie s
ą
w tym przypadku najwa
ż
niejszymi priorytetami, ten obszar
zastosowania mo
ż
e by
ć
nawet pionierski dla bardziej wymagaj
ą
cych zada
ń
.
Cele i granice rozwi
ą
za
ń
mechatronicznych
Celami rozwi
ą
za
ń
mechatronicznych s
ą
:
• realizowanie nowych funkcji,
• poprawa sposobów zachowania si
ę
systemu przez sterowanie lub regulacj
ę
bez
ingerencji z zewn
ą
trz,
• rozszerzenie granic zastosowania,
• samoczynne nadzorowanie systemu i/lub diagnostyki uszkodze
ń
,
• osi
ą
gni
ę
cie integracji struktury w małej przestrzeni,
• mo
ż
liwo
ść
doł
ą
czenia podsystemów mechatronicznych jako sprawdzonych
podzespołów lub zespołów,
• poprawa pewno
ś
ci działania.
Ograniczeniami rozwi
ą
za
ń
mechatronicznych mog
ą
by
ć
:
• zbyt wysoka temperatura otoczenia pracy lub obci
ąż
enie mechaniczne, np. drgania,
które szkodz
ą
komponentom elektronicznym. Wtedy te ostatnie nie daj
ą
si
ę
zintegrowa
ć
,
• niemo
ż
liwo
ść
lub niecelowo
ść
napraw. Wymagana jest wymiana systemu
mechatronicznego lub jego komponentu,
• zbyt wysoki stosunek osi
ą
gów (mo
ż
liwo
ś
ci) do ceny w danej sytuacji rynkowej, gdy
ż
okre
ś
lone sensory i aktuatory, albo cały system s
ą
(jeszcze) za drogie.
52
Konsekwencje rozwoju systemów mechatronicznych
1. Dla samych systemów:
a) funkcje, które były dotychczas realizowane w sposób
mechaniczny s
ą
lepiej wykonywane przez układy
elektroniczne i oprogramowanie (przesuni
ę
cie funkcji),
b) powstaj
ą
nowe (realizowane niematerialnie) funkcje
systemu przez samo sprz
ęż
enie informatyczne
podsystemów (rozszerzenie funkcji),
c) systemy mog
ą
by
ć
wł
ą
czane w sieci do przetwarzania
informacji.
2. Dla metodyki projektowania systemu:
Wzrost b
ę
d
ą
cej do dyspozycji mocy obliczeniowej
komputerów umo
ż
liwia zastosowanie efektywniejszych
narz
ę
dzi obliczeniowych i symulacyjnych.
Wymagania dotycz
ą
ce wytwarzanych wyrobów (np. maszyn) obejmuj
ą
cz
ę
sto ich elastyczno
ść
,
wysok
ą
wydajno
ść
i dokładno
ść
, zwarto
ść
konstrukcji oraz mo
ż
liwie niskie koszty. Dzi
ę
ki
zastosowaniu rozwi
ą
za
ń
mechatronicznych mo
ż
liwe jest np. znaczne zredukowanie nakładów
zwi
ą
zanych z monta
ż
em i instalacj
ą
okablowania. Szafy sterownicze s
ą
znacznie mniejsze lub
te
ż
całkowicie wyeliminowane (sterownik i inne zespoły s
ą
zintegrowane z maszyn
ą
).
Rozproszone rozwi
ą
zania nap
ę
dów sprawiaj
ą
,
ż
e instalacje s
ą
elastyczne i osi
ą
gaj
ą
wysokie
pr
ę
dko
ś
ci. Ponadto mechatronika upraszcza justowanie maszyn, poniewa
ż
zastosowanie
inteligentnych nap
ę
dów powoduje zautomatyzowanie ich nastaw (dobór parametrów), co
dotychczas musiało by
ć
realizowane manualnie.
Przej
ś
cie z tradycyjnego, sekwencyjnego procesu projektowania (rozwoju) do
mechatronicznego, równoległego (współbie
ż
nego) daje oszcz
ę
dno
ś
ci rz
ę
du 20% kosztów.
Ró
ż
nica, w porównaniu z konwencjonalnymi pracami in
ż
ynierskimi, wyst
ę
puje tak
ż
e podczas
realizacji zlece
ń
, a poszczególne działy nie pracuj
ą
ju
ż
kolejno po sobie, ale dział mechaniczny,
elektroniczny i informatyczny
ś
ci
ś
le od pocz
ą
tku ze sob
ą
współpracuj
ą
. Opracowuj
ą
c ci
ą
gle
nowe rozwi
ą
zania wyrobów w mechatronicznym systemie modułowym, ze standardowych
komponentów łatwo uzyskuje si
ę
wiele ich wariantów dostosowanych do wymaga
ń
klientów.
Poszczególne zespoły nie musz
ą
ju
ż
by
ć
od nowa konstruowane dla ka
ż
dego projektu. Pozwala
to na zaoszcz
ę
dzenie podczas rozwoju wiele czasu i pieni
ę
dzy.
Ponadto zaawansowane narz
ę
dzia programowe wspomagaj
ą
konstruktorów podczas realizacji
projektów. Pozwalaj
ą
one na automatyczne generowanie dokumentacji dotycz
ą
cej projektu,
takiej jak np. rysunki konstrukcyjne, a tak
ż
e dokumentowanie całego procesu projektowania.
Dalsz
ą
korzy
ś
ci
ą
jest mo
ż
liwo
ść
wykonywania wirtualnych testów zespołów, maszyn i instalacji
ju
ż
podczas procesu projektowania. Dzi
ę
ki temu mo
ż
na wcze
ś
nie wykry
ć
i usun
ąć
bł
ę
dy,
a tak
ż
e mo
ż
na zrezygnowa
ć
z budowy prototypu wyrobu.
Efekty zastosowania rozwi
ą
za
ń
mechatronicznych
53
Człony przenosz
ą
ce i przetwarzaj
ą
ce
Elementy umieszczone na przek
ą
tnej s
ą
członami przenosz
ą
cymi z wielko
ś
ciami
wej
ś
ciowymi i wyj
ś
ciowymi tego samego
charakteru fizycznego. Wszystkie inne
grupy s
ą
przetwornikami:
• sensory s
ą
to przetworniki (czujniki)
nieelektryczne
→
elektryczne
• aktuatory s
ą
to przetworniki
elektr../nieelektryczne
→
mechaniczne
Mechanicz. Elektrycz.
Magnet.
Termicz. Optycz.
WY
WE
Wielk.
mechanicz.
Wielk.
elektrycz.
Wielk.
magnet.
Wielk.
termicz.
Wielk.
optycz.
Elem.
mechanicz.
Elem.
elektron.
Elem.
magnet.
Elem.
termicz.
Elem.
optycz.
Elementy mechaniczne
Elementy elektroniczne
Elementy magnetyczne
Elementy termiczne
Elementy optyczne
• Elementy strukturalne (sztywno
ść
, elastyczno
ść
)
• Poł
ą
czenia (materiał/ siła, zamkni
ę
cie kształtu)
• Pr
ę
ty • Płyty • Wałki • Spr
ęż
yny • Tłumiki • Zderzaki • Blokady • Uszczelki
• Przeguby • Ło
ż
yska • Prowadnice • Przekładnie • Sprz
ę
gła • Hamulce
• Mechanizmy przeł
ą
czaj
ą
ce • Regulatory • Elementy płynowo-prowadnicowo-regulacyjne
• Oporniki • Kondensatory • Cewki • Diody • Tranzystory • Tyrystory • Mostki
• Wzmacniacze operacyjne • Układy scalone • Procesory • Pami
ę
ci
• Magnesy • Elektromagnesy • Elementy magneto-mechaniczno-optyczne
• Przewodniki ciepła • Transmitery ciepła • Wymienniki ciepła • Elementy grzejno-
chłodz
ą
ce • Ł
ą
czniki ciepło/siła
• Optyczne
ź
ródła promieniowania • LASERY • Zwierciadła • Pryzmaty • Soczewki
• Siatki optyczne • Obiektywy • Kondensory • Okulary • Elementy
ś
wiatłowodowe
• Elementy opto-elektroniczne
Moduły i elementy stosowane w budowie wyrobów
mechatronicznych
System mechatroniczny – jednostka automatyzacji
System
System
mechatroniczny
mechatroniczny
Wej
ś
cie
Wyj
ś
cie
Wzmacniacz
Silnik
Kabel
Pr
ą
d przemienny
Pr
ą
d stały
Moc
Sygnały
Ło
ż
yska
mechaniczne
indukcyjne
pojemno
ś
ciowe
elektryczne
Sensory
Sensory
Mechanika
Mechanika
E
le
k
tr
o
te
c
h
n
ik
a
E
le
k
tr
o
te
c
h
n
ik
a
T
e
c
h
n
ik
a
T
e
c
h
n
ik
a
k
o
m
p
u
te
ro
w
a
k
o
m
p
u
te
ro
w
a
Ło
ż
yska
ś
lizgowe
Ło
ż
yska
toczne
Prowadnice
Ś
ruby poci
ą
gowe
Korpusy
Ethernet
...
Sie
ć
komunikacyjna
Sterownik
Moduły I/O
cyfrowe
analogowe
PC
Program steruj
ą
cy
Wizualizacja
System operacyjny
54
Zmiana udziału składników w kosztach
wytwarzania systemów mechatronicznych
1970
1980
1990
2000
Rok
20
40
60
80
100
Koszty wytwarzania w %
Zespoły mechaniczne
Ukła
dy ele
ktryc
zne/ e
lektro
niczn
e
Oprogramowanie
Przykłady systemów mechatronicznych
Robot przemysłowy
(firma KUKA)
Obrabiarka
Samochód osobowy
(BMW)
Aparat fotograficzny
(lustrzanka)
Wyszukiwarka
Podobne podstrony:
MTR 2011 Wstep do mechatr cz 8
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 5 (2)
MTR 2009 Wstep do mechatr cz 7 (2)
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 6
MTR 2009 Wstep do mechatr cz 2 (2)
MTR 2009 Wstep do mechatr cz 4 (2)
MTR 2009 Wstep do mechatr cz 8 Nieznany
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 2
MTR 2009 Wstep do mechatr cz 5
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 3
MTR 2009 Wstep do mechatr cz 4
MTR 2009 Wstep do mechatr cz 7
MTR 2009 Wstep do mechatr cz 8
Wstęp do pedagogiki, WSTĘP DO PEDAGOGIKI 15.10.2011, WSTĘP DO PEDAGOGIKI
więcej podobnych podstron