
1
Artificial Muscle for Small Robots
Ron Pelrine, Roy Kornbluh, Jose Joseph, Seiki Chiba
SRI International
SRI’s Advanced Automation Technology Center
The Advanced Automation Technology Center (AATC) of SRI International (SRI) focuses on
the design, development, and transfer to its clients of advanced automation technologies. These
technologies span a wide range of fields and include intelligent document understanding, 3-D machine
vision, sensor placement, telerobotics, field robotics, and new transducer technologies such as artificial
muscle.
In the area of new transducer technologies, AATC works closely with other laboratories within
SRI, sharing a wide range of facilities and equipment within SRI. These laboratories maintain state-of-
the-art design, analysis, and fabrication facilities including special and general measurement and test
equipment, an environmental chamber, a model shop, chemistry and spray fabrication facilities, and
computer-aided design centers. AATC works closely with SRI’s Physical Electronics Laboratory,
which maintains clean rooms and other microfabrication facilities.
AATC has worked with a wide range of government and commercial clients in the US, Japan,
and Europe. As a nonprofit institution, SRI transfers the technologies developed at AATC to the
sponsoring commercial clients, or licenses them to manufacturing companies in the case of government-
sponsored work.
AATC has worked on a wide range of robotic and transducer technologies. In the area of
robotics, for example, AATC developed a laboratory prototype of a pipeline inspection robot. The
pipeline robot used novel magnetic wheels that enabled it to travel on the walls and ceilings of 15-cm
natural-gas pipes. Legged and flying robots, such as those using artificial muscle, are a core interest of
AATC. For example, AATC is currently developing a small (15-cm wingspan) flapping wing vehicle.
Other research and development focuses on basic transducers; In addition to work on artificial muscle,
AATC has developed novel levitated devices for applications such as sensors (flow meters,
accelerometers, etc.), micromotors, and clean-room automation. AATC demonstrated what is believed
to be the world’s first passive self-levitated (no bias forces) magnetic structure at room temperature.
Another sensor area of interest to AATC is tonometry, a technique for measuring blood pressure
unobtrusively and continuously. For a number of years AATC has developed tonometry technology,
some of which is currently sold commercially.
Artificial Muscles
Background
. AATC has been investigating artificial muscles on the “Artificial Muscles for Small
Robots” project since 1992. The term artificial muscle, analogous to natural muscle, describes any
actuator material that is substantially scale invariant in performance, where larger actuators can be
considered as a collection of mechanically linked microactuators. For example, a single electromagnetic
voice coil actuator is not an artificial muscle because it is not scale invariant (it has poor performance on
2
small scales), and it is not a collection of mechanically linked microactuators. By contrast, a piezoelectric
material has substantially scale-invariant performance, and a large, multilayer piezoelectric actuator
consists of a collection of mechanically linked microactuators.
Our goal for the project is to identify and develop an artificial muscle with performance
comparable to that of natural muscle. Such an artificial muscle would have overall performance greatly
exceeding that of existing artificial actuators and could be used for small robots, inkjet printers, micro
light scanners, micropumps, and a wide range of other microapplications. The artificial muscle would be
particularly applicable to microdevices, for which existing actuator technologies are limited; but since it is
scale invariant, it could also be used for a wide range of macro applications including robots, speakers,
and motors.
In the first year of the project, we studied a wide variety of actuator technologies that might be
used to make artificial muscles with performance comparable to that of natural muscles. Based on the
results of this first-year investigation, we chose electrostrictive polymers as the most promising
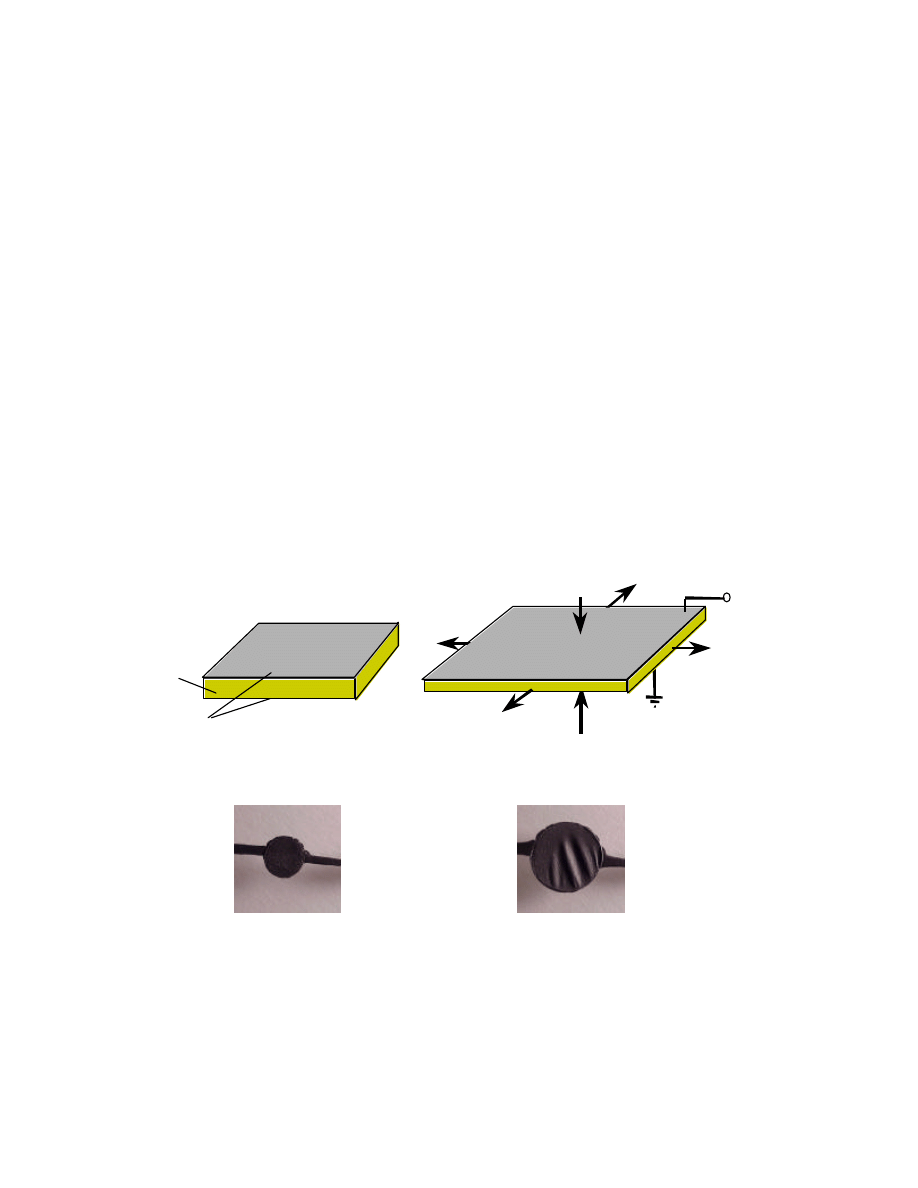
technology for artificial muscles. The principle of operation of the electrostrictive polymers investigated
by SRI is shown in Figure 1. Unlike other electrostrictive polymers (EPs), which work via molecular
changes, SRI’s EP materials work via bulk electrostatic forces (Maxwell stress). As shown in Figure 1,
a relatively soft polymer is sandwiched between two compliant electrodes. When a voltage difference is
applied between the compliant electrodes, the electrostatic forces squeeze and stretch the polymer, thus
providing a mechanism for actuation.
Figure 1. Principle of Operation of Electrostrictive Polymers
(Circular Black Areas in Bottom Photos are Active Electrode Areas).
V
Polymer film
Compliant electrodes (on
top and bottom surfaces)
Voltage off
Voltage on
3
Comparison with Other Technologies
. While the mechanism of SRI’s artificial muscle is based
on electrostatics, the technology is very different from conventional air-gap electrostatic devices.
Actuation pressures are typically 10–200 times greater in artificial muscle than in air gap electrostatic
devices because of artificial muscle’s higher dielectric constants (1 for air compared to 2–12 for
polymers); higher breakdown strength (up to 400 V/
µ
m for polymers, compared with about 100 V
/µ
m
maximum in practical electrostatic devices); and better coupling (artificial muscle couples both squeezing
and stretching to convert electrical to mechanical energy, while conventional air-gap devices use rigid
electrodes and can couple in only one degree of freedom).
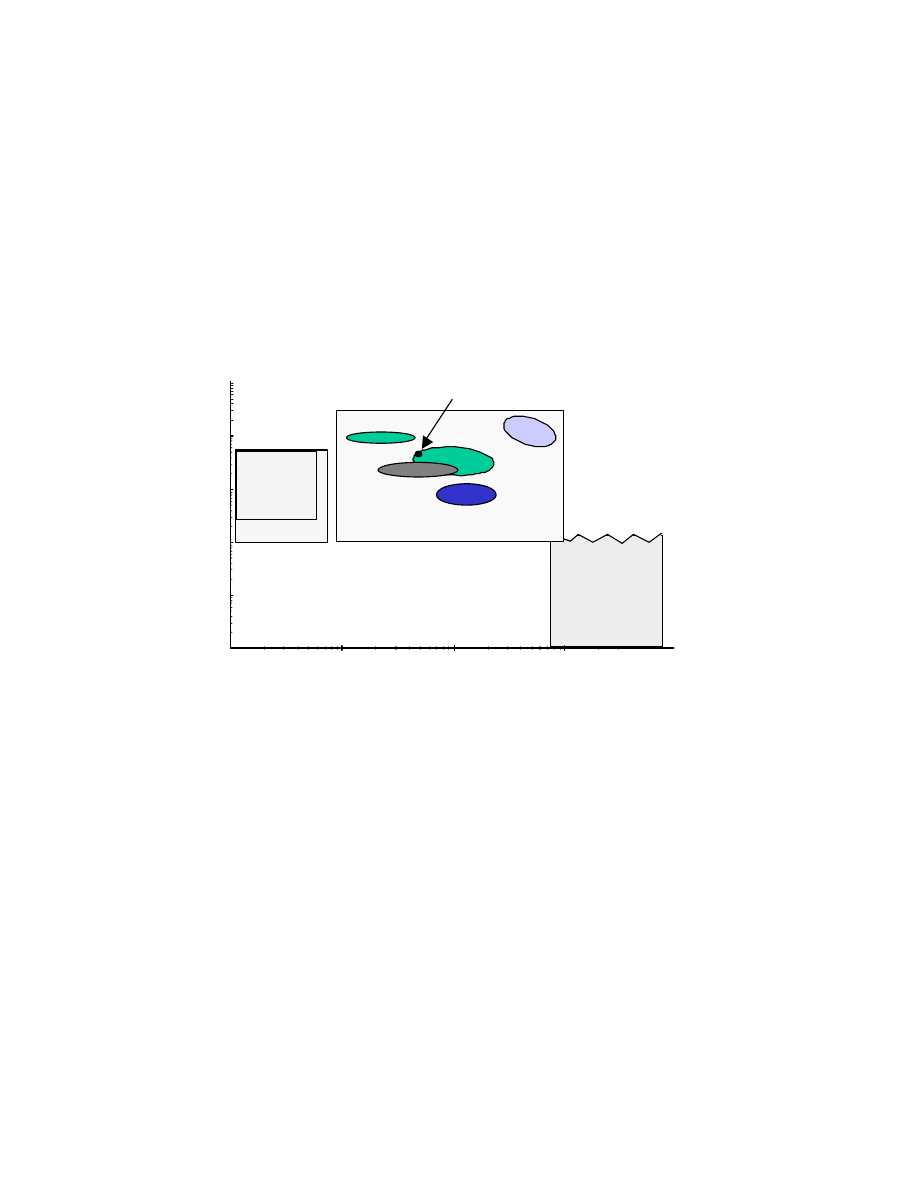
Figure 2 shows a comparison between artificial muscle and other high-speed actuator
technologies. Note that the performance of artificial muscle exceeds that of natural muscle.
Figure 2. Comparison Between High-Speed Actuator Technologies
Materials for Artificial Muscle
. Many polymer materials have been tested as artificial muscle.
All insulating polymers show some response, but some materials are dramatically better than others.
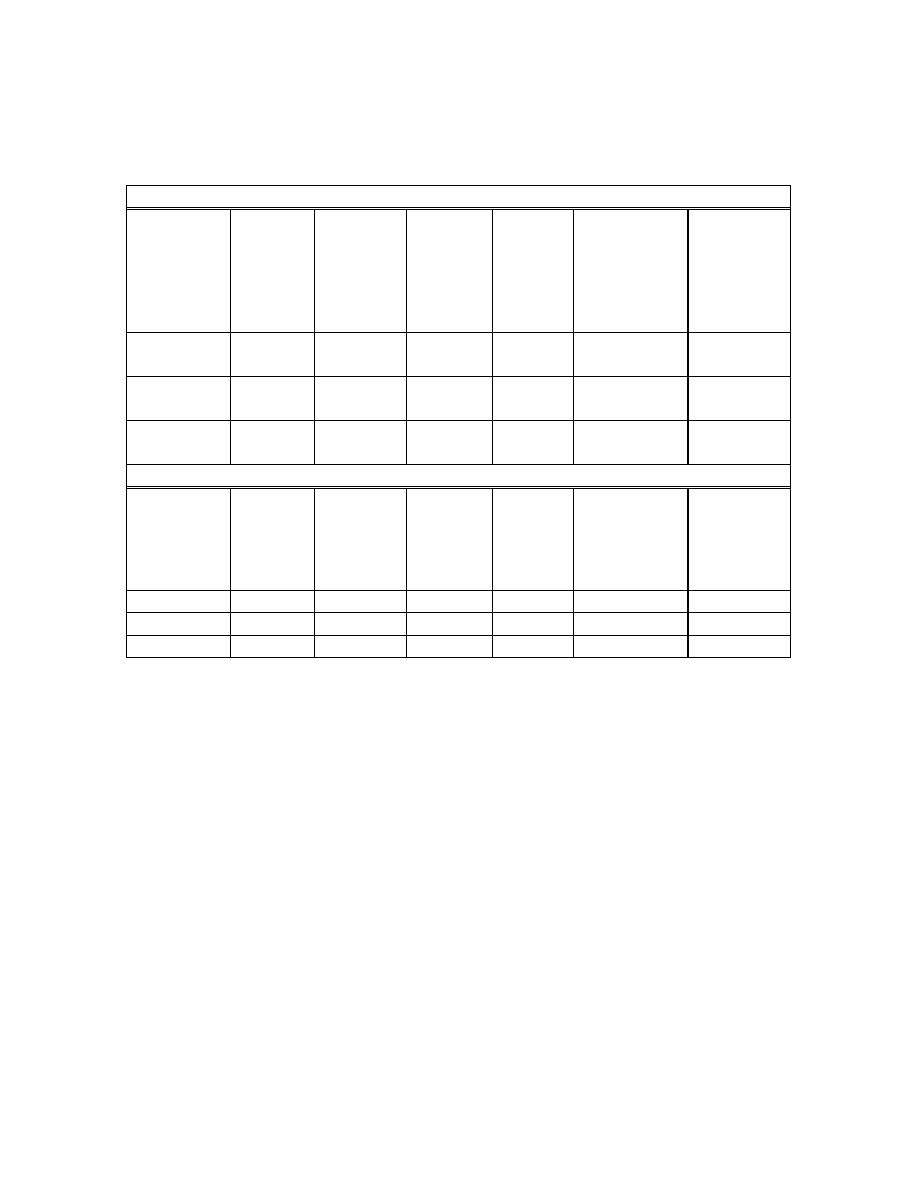
Silicones and acrylic elastomers have shown the best response. Table 1 shows the performance of two
silicones and an acrylic elastomer. Note that the strain of the acrylic elastomer can exceed 200%, and
its energy density is higher than that of any known field-actuated material. The acrylic elastomer is a
powerful material, but we note that silicone is faster, due to higher viscoelastic losses in acrylic. Silicones
have a bandwidth greater than 1 kHz, while acrylic elastomers are currently limited to below 100 Hz.
Research is now concentrating on ways to achieve the high strain and energy density performance of
acrylics in operation at the speeds of silicones.
Piezoelectric
&
Magneto-
Strictive
Actuation Pressure/Density (kPa-m
3
/kg)
Strain (%)
0.1
1
10.
.01
0.1
1
10
Magnetic
Electro-
static
Actuators
100
1000
Acrylic
Elastomers
Silicone HS3
Artificial Muscle
Polyurethanes
Natural
Muscle
Silicone
NuSil CF19-2186
FY 2000 Goal
4
Table 1. Performance of Two Silicones (HS3 and CF19-2186) and an Acrylic (VHB 4910)
Circular Strain Test
Material
Prestrain
(x,y)
(%, %)
Actuated
Relative
Thickness
Strain
(%)
Actuated
Relative
Area
Strain
(%)
Field
Strength
(MV/m)
Effective
Compressive
Stress (MPa)
Estimated
Elastic
Energy
Density
(MJ/m
3
)
HS3 silicone
(68,68)
(14,14)
48
41
93
69
110
72
0.3
0.13
0.098
0.034
CF19-2186
silicone
(45,45)
(15,15)
39
25
64
33
350
160
3.0
0.6
0.75
0.091
VHB 4910
acrylic
(300,300)
(15,15)
61
29
158
40
412
55
7.2
0.13
3.4
0.022
Linear Strain Test
Material
Prestrain
(x,y)
(%, %)
Actuated
Relative
Thickness
Strain (%)
Relative
Strain
(%)
Field
Strength
(MV/m)
Effective
Compressive
Stress (MPa)
Estimated
Elastic
Energy
Density
(MJ/m
3
)
HS3
(280, 0)
54
117
128
0.4
0.16
CF19-2186
(100,0)
39
63
181
0.8
0.2
VHB 4910
(540,75)
68
215
239
2.4
1.36
In addition to the polymer, SRI is investigating various electrode materials. Metals such as gold
are typically too stiff and crack when actuated, but we have found that by suitable patterning they can
elongate up to 80% while retaining their conductivity. For higher strains, particulate materials such as
carbon black and carbon nanotubes in a binder generally work well. Electrode materials are an other
ongoing area of research. Existing materials work well in single layers, but in situ fabrication of multiple
layers of muscle is difficult unless the layers are thick
(e.g., > 100
µ
m).
Fabrication of Artificial Muscle
. We have developed a variety of ways to fabricate artificial
muscle. Spin coating of polymers in solvents works well, and we have demonstrated muscle as thin as 1
µ
m. Thinner films reduce the operating voltage, which tends to be higher for electrostrictive polymer
artificial muscle than it is for other electrostatically driven technologies. Other techniques can be used for
thicker films. For example, dip coating can be used to make artificial muscles in complex shapes, and
simple casting or spraying can be used for very thick films. Electrodes are fabricated via sputter and
photolithography for patterned metals, or spraying for particulate electrodes. Controlled wetting can
also be used for some types of electrode fabrication.
5
Artificial Muscle Actuators
. We have designed and demonstrated a wide range of artificial
muscle actuators. Examples include artificial muscle bimorphs and unimorphs capable of greater than
270 degrees of bending, artificial muscle diaphragms that can actuate from a flat to a hemispherical
shape, and a range of simple linear actuators. Application-level devices, such as micro light scanners
and minipumps, have also been demonstrated to show the wide applicability of the technology.
Most artificial muscle actuators have been based on approaches used in the past for other
actuator materials such as piezoelectric unimorphs. However, an interesting area for research and
development has been the investigation of the unique actuation properties of artificial muscle and the
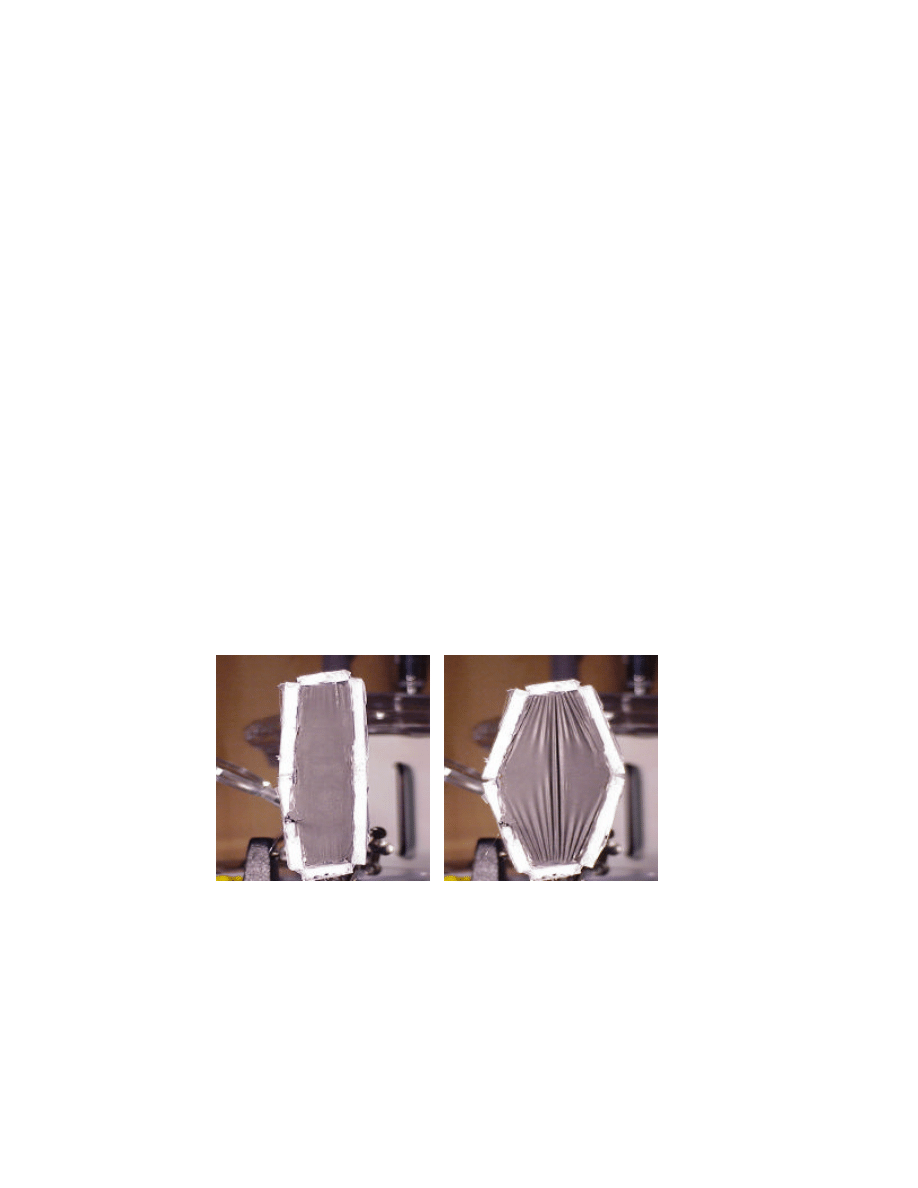
design of actuators that can best exploit it. For example, our “bow actuator”, shown in Figure 3, uses a
high prestrain in the polymer in one direction, together with a flexure design, to enhance actuation in the
low prestrain direction. Analysis of the actuation of SRI’s artificial muscle has also revealed new
directions for actuator improvements such as operation at resonance to enhance electrical-to-
mechanical conversion and ways to load the muscle for optimal performance.
Summary
Research on artificial muscles at SRI’s AATC has reached an exciting phase. Strain, pressure,
energy density, and response time performance parameters have increased by factors of 5–30 in the last
2 years. Technical progress continues in understanding the fundamental design of artificial muscles at the
material, fabrication, and actuator levels. Perhaps even more exciting than such fundamental progress is
the level of performance of the artificial muscle, which has reached the stage for attractive applications.
Thus, the near future of artificial muscle research at SRI’s AATC will focus on both fundamental and
application areas.
Figure 3. Bow actuator
Voltage Off
Voltage On
Wyszukiwarka
Podobne podstrony:
06 User Guide for Artlantis Studio and Artlantis Render Export Add ons
06 Bulgarian Greek for beginners
Induction Generators For Small Hydro Schemes
Requiem for a Small Planet Ray Cummings(1)
Development Of A Single Phase Inverter For Small Wind Turbine
effects of kinesio taping on the timing and ratio of vastus medialis obliquus and lateralis muscle f
smart strategies for small business
LeGuin, Ursula K Ekumen 06 The Word For World is Forest
GbpUsd analysis for July 06 Part 1
Artificial Neural Networks for Beginners
14 Preparation for White For 1 e4 Players 06 Robatsch Defense
EU funding 'Orwellian' artificial intelligence plan to monitor public for abnormal behaviour xxx
PKM Pompy Nowa small 2, IŚ Tokarzewski 27.06.2016, V semestr COWiG, PKM (Podstawy konstrukcji mechan
12 Active Video Modules for Launchable Reconnaissance Robots
The search for artificial intelligence, nkjo.leg.pobrane materiały, Czytanie
GbpUsd analysis for July 06 Part 1
Artificial Neural Networks for Beginners
Small Bertrice Dziedzictwo Skye 06 Złośnice
Suite for viola, small orchestra Group 3 Viola
więcej podobnych podstron