
M
EMOIRS
of the
American Mathematical Society
Number 972
The Moment Maps in Diffeology
Patrick Iglesias-Zemmour
September 2010
•
Volume 207
•
Number 972 (second of 5 numbers)
•
ISSN 0065-9266
American Mathematical Society
September 2010
• Volume 207 • Number 972 (second of 5 numbers)
• ISSN 0065-9266
The Moment Maps in Diffeology
Patrick Iglesias-Zemmour
Number 972
Library of Congress Cataloging-in-Publication Data
Iglesias-Zemmour, Patrick, 1953-
The moment maps in diffeology / Patrick Iglesias-Zemmour.
p. cm. — (Memoirs of the American Mathematical Society, ISSN 0065-9266 ; no. 972)
“September 2010, Volume 207, number 972 (second of 5 numbers ).”
Includes bibliographical references.
ISBN 978-0-8218-4709-1 (alk. paper)
1. Symplectic geometry.
I. Title.
QA665.I35
2010
514
.72—dc22
2010022756
Memoirs of the American Mathematical Society
This journal is devoted entirely to research in pure and applied mathematics.
Publisher Item Identifier. The Publisher Item Identifier (PII) appears as a footnote on
the Abstract page of each article. This alphanumeric string of characters uniquely identifies each
article and can be used for future cataloguing, searching, and electronic retrieval.
Subscription information. Beginning with the January 2010 issue, Memoirs is accessi-
ble from www.ams.org/journals. The 2010 subscription begins with volume 203 and consists of
six mailings, each containing one or more numbers. Subscription prices are as follows: for paper
delivery, US$709 list, US$567 institutional member; for electronic delivery, US$638 list, US$510 in-
stitutional member. Upon request, subscribers to paper delivery of this journal are also entitled to
receive electronic delivery. If ordering the paper version, subscribers outside the United States and
India must pay a postage surcharge of US$65; subscribers in India must pay a postage surcharge of
US$95. Expedited delivery to destinations in North America US$57; elsewhere US$160. Subscrip-
tion renewals are subject to late fees. See www.ams.org/customers/macs-faq.html#journal for
more information. Each number may be ordered separately; please specify number when ordering
an individual number.
Back number information. For back issues see www.ams.org/bookstore.
Subscriptions and orders should be addressed to the American Mathematical Society, P. O.
Box 845904, Boston, MA 02284-5904 USA. All orders must be accompanied by payment. Other
correspondence should be addressed to 201 Charles Street, Providence, RI 02904-2294 USA.
Copying and reprinting.
Individual readers of this publication, and nonprofit libraries
acting for them, are permitted to make fair use of the material, such as to copy a chapter for use
in teaching or research. Permission is granted to quote brief passages from this publication in
reviews, provided the customary acknowledgment of the source is given.
Republication, systematic copying, or multiple reproduction of any material in this publication
is permitted only under license from the American Mathematical Society.
Requests for such
permission should be addressed to the Acquisitions Department, American Mathematical Society,
201 Charles Street, Providence, Rhode Island 02904-2294 USA. Requests can also be made by
e-mail to reprint-permission@ams.org.
Memoirs of the American Mathematical Society (ISSN 0065-9266) is published bimonthly (each
volume consisting usually of more than one number) by the American Mathematical Society at
201 Charles Street, Providence, RI 02904-2294 USA. Periodicals postage paid at Providence, RI.
Postmaster: Send address changes to Memoirs, American Mathematical Society, 201 Charles
Street, Providence, RI 02904-2294 USA.
c
2010 by the American Mathematical Society. All rights reserved.
Copyright of individual articles may revert to the public domain 28 years
after publication. Contact the AMS for copyright status of individual articles.
This publication is indexed in Science Citation Index
R
, SciSearch
R
, Research Alert
R
,
CompuMath Citation Index
R
, Current Contents
R
/Physical, Chemical & Earth Sciences.
Printed in the United States of America.
∞
The paper used in this book is acid-free and falls within the guidelines
established to ensure permanence and durability.
Visit the AMS home page at http://www.ams.org/
10 9 8 7 6 5 4 3 2 1
15 14 13 12 11 10
Contents
Introduction
Chapter 1.
Few words about diffeology
Chapter 2.
Diffeological groups and momenta
Chapter 3.
The paths moment map
Chapter 4.
The 2-points moment map
Chapter 5.
The moment maps
Chapter 6.
The moment maps for exact 2-forms
Chapter 7.
Functoriality of the moment maps
Chapter 8.
The universal moment maps
Chapter 9.
About symplectic manifolds
Chapter 10.
The homogeneous case
Chapter 11.
Examples of moment maps in diffeology
Bibliography
iii


Abstract
This memoir presents a generalization of the moment maps to the category
{Diffeology}. This construction applies to every smooth action of any diffeological
group G preserving a closed 2-form ω, defined on some diffeological space X. In
particular, that reveals a universal construction, associated to the action of the
whole group of automorphisms Diff(X, ω). By considering directly the space of
momenta of any diffeological group G, that is the space
G
∗
of left-invariant 1-forms
on G, this construction avoids any reference to Lie algebra or any notion of vector
fields, or does not involve any functional analysis. These constructions of the various
moment maps are illustrated by many examples, some of them originals and others
suggested by the mathematical literature.
Received by the editor October 4, 2007.
Article electronically published on March 10, 2010; S 0065-9266(10)00582-X.
2000 Mathematics Subject Classification. Primary 53C99, 53D30, 53D20.
Key words and phrases. Diffeology, Moment Map, Symplectic Geometry.
Thanks
. I am happy to thank the Hebrew University of Jerusalem Israel for its hospitality.
The friendly and studious atmosphere I found here helped me to complete this work. I am glad to
thank my friends with whom I discussed the matter developed in this memoir, Jean-Marie Souriau
of course, but also Paul Donato, Yael Karshon and Fran¸
cois Ziegler. Also I would like to thank
the referee who allowed me, by its remarks and questions, to enrich a part of this memoir.
c
2010 American Mathematical Society
v
Introduction
The moment map has been introduced in the 1970’s in Souriau’s work about
the structure of dynamical systems [Sou70]. It is the tool by excellence for dealing
with symmetries in symplectic, or pre-symplectic geometry. But, in recent decades,
the necessity appeared to extend the notion of symplectic formalism and moment
maps, outside the usual framework of manifolds, to include constructions in infinite
dimension — spaces of connections of principal bundles, spaces of functions etc. —
or to include singular spaces — orbifolds, singular symplectic reduction spaces etc..
In this paper, we shall use the category
{Diffeology} as the framework for such a
generalization. We know already that diffeology is suitable to describe, in a unique
and satisfactory way, manifolds or infinite dimensional spaces, as well as singular
quotients. But, if diffeology excels with covariant objects, as differential forms, it
is more subtle when it is question of contravariant objects like vector fields, Lie
algebra
, kernel etc.. Thus, in order to build a good diffeological theory of the
moment map, and to avoid useless debates, we need to get freed from everything
related to contravariant geometrical objects.
Actually, the notion of moment map is not really an object of the symplectic
world, but relates more generally to the category of space equipped with closed
2-forms. The non-degeneracy condition is secondary and can be skipped first from
the data. This has been underlined explicitly by Souriau in his symplectic formula-
tion of Noether’s theorem, which involves pre-symplectic manifolds. On symplectic
manifolds, Noether’s theorem is empty. So, the moment map is just an object of
the world of differential closed form, and there is no reason a priori that it could
not be extended to diffeology which has a very well developed framework for De
Rham’s calculus.
Now, in order to generalize the moment map in diffeology, we need to under-
stand its meaning in the simplest possible case. Let M be a manifold equipped with
a closed 2-form ω. And, let G be a Lie group acting smoothly on M and preserving
ω. That is, g
∗
M
(ω) = ω for all elements g of G, where g
M
denotes the action of g on
M. Let us assume that ω is exact, ω = dλ, and moreover that λ is also invariant
by the action of G. So, for every point m of M, the pullback of λ, by the orbit map
ˆ
m : g
→ g
M
(m) is a left-invariant 1-form of G. That is, an element of the dual of
the Lie algebra
G
∗
. The map, μ : m
→ ˆ
m
∗
(λ) is exactly the moment map of the
action of G on the pair (M, ω) (at least one of the moment maps, since they are
defined up to constants). As we can see, this construction does not involve really
the Lie algebra of G but the space
G
∗
of left-invariant 1-forms on G. Since this space
is well defined in diffeology, we have just to replace « manifold » by « diffeological
1
Several authors, beginning with Souriau, proposed some generalizations of Lie algebra in
diffeology. But, it does not seem to exist a unique good choice. Such generalizations rely actually
on the kind of problem treated.
1
2
PATRICK IGLESIAS-ZEMMOUR
space », and « Lie group » by « diffeological group », and everything works the same.
So, let us change the manifold M for a diffeological space
X, and let G be some
diffeological group. Let us continue to denote the space of left-invariant 1-forms on
G by
G
∗
, even if the star does not refer a priori to some duality, and let us call it
simply the space of momenta of the group G. Note that the group G continues to
act on
G
∗
by pullback of its adjoint action Ad : (g, k)
→ gkg
−1
, so we don’t lose
the notions of coadjoint action and coadjoint orbits.
So, if we got the good space of momenta, which is the space where the moment
maps are assumed to take their values, the problem remains that not every G-
invariant closed 2-form is exact. And moreover, even if such form is exact, there
is no reason, for some of its primitives to be G-invariant. We shall pass over this
difficulty by introducing an intermediary, on which we can realize the simple case
described above. This intermediary is the space Paths(X), of all the smooth paths
of X, where the group G acts naturally by composition. And since Paths(X) carries
a natural functional diffeology, it is legitimate to consider its differential forms, and
this is what we do. By integrating ω along the paths, we get a differential 1-form
defined on Paths(X), and invariant by the action of G. The exact tool used here is
the chain-homotopy operator K [Piz05]. The 1-form Λ = Kω, defined on Paths(X),
is a G-invariant primitive of the 2-form Ω = (ˆ
1
∗
− ˆ0
∗
)(ω), where ˆ
1 and ˆ
0 map every
path of X to its ends. Thus, thanks to the construction described above, we get a
moment map Ψ for the 2-form Ω = dΛ and the action of G on Paths(X). But, this
paths moment map Ψ is not the one we are waiting for. We need to push it down
on X, or moreover on X
× X. Now, if we get this way a 2-points moment map ψ
well defined on X
× X, it doesn’t take anymore its value in G
∗
, as does Ψ, but in
the quotient
G
∗
/Γ, where Γ is the image by Ψ of all the loops of X. Fortunately,
Γ = Ψ(Loops(X)) is a subgroup of (
G
∗
, +) and depends on the loops only through
their free homotopy classes. In other words, Γ is an homomorphic image of the
fundamental group π
1
(X) of X, or more precisely of its abelianized. Well, it is not
a big deal to have the moment map taking its values in some quotient of the space
of momenta, we can live with that. Especially if the group Γ is invariant under
the coadjoint action of G, which is actually the case
. But, we are not completely
done. The usual moment map is not a 2-points function, but a 1-point function.
So, we have to extract our usual moment maps from this 2-points function ψ.
This is quite easy, thanks to its very definition, the moment map Ψ satisfies an
additive property for juxtaposition of paths. And, the moment map ψ inherits
this property as a cocycle condition: for any three point x, x
and x
of X we
have ψ(x, x
) + ψ(x
, x
) = ψ(x, x
). Hence, for X connected, there exists always
a map μ such that ψ(x, x
) = μ(x
)
− μ(x). And, any two such maps differ just
by a constant. So, we get finally our wanted set of moment maps μ, defined in
the diffeological framework. The only difference, with the simplest case described
above, is that the moment maps take their values in some quotient of the space
of momenta, instead of the space of momenta itself. But, this is in fact already
the case in the classical theory. It doesn’t appear explicitly because people focus
more on hamiltonian actions than just on symplectic actions. Actually, the group
2
The space X will be assumed to be connected, as many results need this hypothesis.
3
More precisely, the elements of Γ are not just elements of
G
∗
but are moreover closed, and
therefore invariant, each of them, by the coadjoint action of G.
INTRODUCTION
3
Γ represents the very obstruction, for the action of G on (X, ω), to be hamiltonian.
We shall call Γ, the holonomy of the action of G.
Now, let us come back to some properties of the various moment maps in-
troduced above. The paths moment maps Ψ and its projection ψ are equivariant
with respect to the action of G on X and the coadjoint action of G on
G
∗
, or the
projection of the coadjoint action on
G
∗
/Γ. But this is not anymore the case for
the moments maps μ. The variance of the maps μ reveals a family of cocycles θ
from G to
G
∗
/Γ differing just by coboundaries, and generalizing Souriau’s cocycles
[Sou70]. This class of cocycles σ belongs to the cohomology group H
1
(G,
G
∗
/Γ),
and will be called Souriau’s class of the action of G of (X, ω). Souriau’s class σ is
precisely the obstruction for the 2-points moment map ψ to be exact, that is for
some moment map μ to be equivariant. Moreover, in parallel with the classical
situation, every Souriau’s cocycle θ defines a new action of G on
G
∗
/Γ, which we
still call the affine coadjoint action (associated to θ). And, the image of a moment
maps μ is a collection of coadjoint orbits for this action. We call these orbits,
the (Γ, θ)-coadjoint orbits of G. Two different cocycles give two families of orbits
translated by the same constant.
Let us remark that the holonomy group Γ and Souriau’s class σ appear clearly
on a different level of meaning, the first one is responsible of the non hamiltonian
character of the action of G, and the second characterizes the lack of equivariance
of the moment maps.
Well, until now we didn’t use all the facilities offered by the diffeological frame-
work. Since we do not restrict ourselves to the category of Lie groups, nothing
prevents us to consider the group of all the automorphisms of the pair (X, ω). That
is, the group Diff(X, ω) of all the diffeomorphisms of X, preserving ω. This group
is a natural diffeological group, acting smoothly on X. Thus, everything built
above applies to Diff(X, ω), and every other action preserving ω, of any diffeo-
logical group, pass through Diff(X, ω), and through the associated object of the
theory developed here. Therefore, considering the whole group of automorphisms
of the closed 2-form ω of X, we get a natural notion of universal moment maps Ψ
ω
,
ψ
ω
and μ
ω
, universal holonomy Γ
ω
, universal Souriau’s cocycles θ
ω
, and universal
Souriau’s class σ
ω
. By the way, this universal construction suggests a simple and
new characterization, for any diffeological space X equipped with a closed 2-form ω,
of the group of hamiltonian diffeomorphisms Ham(X, ω), as the largest connected
subgroup of Diff(X, ω) whose holonomy vanishes.
It is interesting to notice that, contrary to the original constructions [Sou70]
and most of its generalizations, the theory described above is essentially global,
more or less algebraic, do not refer to any differential, or partial differential, equa-
tion and do not involve any notion of vector field or functional analysis techniques.
I give, at the end of the memoir, several examples involving diffeological groups
which are not Lie groups, or involving diffeological spaces which are not manifolds.
We can see how the general theory applies to the singular « symplectic irrational
tori » for which topology is irrelevant.
These general constructions of moment
maps are also applied to a few examples in infinite dimension, and an example
which mixes finite and infinite dimensions. Finally, two examples of orbifolds are
also examined. These examples show without any doubt the ability of this theory
to treat correctly, in a unique framework, avoiding heuristic arguments, the large
variety of situations we can find in the mathematical literature today. For infinite
4
PATRICK IGLESIAS-ZEMMOUR
dimensional (heuristic) examples, see Donaldson’s paper [Dnl99]. By the way, I
developed on purpose some tedious computations, even if it is boring, just to show
diffeology at work. I mean, to show that diffeology is not just a formalism, but a
working calculus method too.
Considering the classical case of a closed 2-form ω defined on a manifold M,
we show in particular that ω is non degenerate if and only if the group Diff(M, ω)
is transitive on M and if a universal moment maps μ
ω
is injective. In other words,
symplectic manifolds are identified, by the universal moment maps, to some coad-
joint orbits (in our general sense) of their group of symplectomorphisms. This idea
that « every symplectic manifold is a coadjoint orbit » is not new, it is suggested
by a well known classification theorem for symplectic homogeneous Lie group ac-
tions [Kir74], [Kos70], [Sou70], and has been stated already in a different context
[Omo86]. What is new here is that diffeology make this statement rigorous without
the use of any functional analysis tools.
In conclusion, beside the point that the construction developed in this mem-
oir is a first step in the elaboration of the symplectic diffeology program, I would
emphasize the fact that, since
{Manifolds} is a full and faithful subcategory of
{Diffeology}, all the constructions developed here apply to manifolds and give a
faithful description of the classical theory of moment maps. As we have seen, there
is no mention, and no use, of Lie algebra or vector fields in this exposition. This
reveal the fact that these objects are also superfluous in the traditional approach,
and can be avoided. And, I would add, they should be avoided. No just because
then, they can be extended to larger categories, but because the use of contravari-
ant object hide the deep fact that the theory of moment maps is a pure covariant
theory. For example, we know that since coadjoint orbits of Lie groups are sym-
plectic they are even dimensional. This is often regarded as a miracle, since it is not
necessarily the case for adjoint orbits. But if we think that Lie algebra have little to
do with the space of momenta of a Lie group, there is no more miracle, just different
behaviors for different objects, which is unsurprising. Moreover I would add, but
this can appear as more or less subjective, that avoiding all this va-et-vient between
Lie algebra and dual of Lie algebra, the diffeological approach of the moment maps
is much more simpler, and even deeper, than the classical approach. Compare for
example Souriau’s cocycle constructions in the original « Structure des syst`
emes
dynamiques » [Sou70] and in this memoir. The only crucial property used here is
connectedness, that is the existence of enough smooth paths connecting points in
spaces.
Now, this constructions, in particular the new diffeological symplectic frame-
work it suggests, come together with a lot of new questions which have not be
answered here. And I hope I’ll develop some of them in future works.
Note
— Diffeology is a maximal extension of the local category of smooth real
domains. It contains by the way, fully and faithfully, the category of manifolds.
Diffeology has been introduced by J.-M Souriau at the beginning of the 1980s
[Sou81], and it is a variant of the theory of K.-T. Chen’s differentiable spaces
introduced few years before [Che77]. Since then, the theory has been enhanced
by some authors. The reader is assumed to be familiar with diffeology even if we
remind some basics constructions in the first Section. For an comprehensive report
on diffeology see [Piz05].

CHAPTER 1
Few words about diffeology
This is a reminder of the few diffeological notions we will use in the following.
More details about these constructions, and proofs, can be found in [Piz05].
1.1. Domains and parametrizations. We call numerical space any power
of the real numbers R, and we call numerical domain, or simply domain, any open
set of any numerical domain. If U is a domain of R
n
, we say that U is an n-domain.
Let X be a set, we call parametrization in X any map defined on some numerical
domain with values in X. The set of all the parametrizations in X is denoted by
Param(X). For any parametrization P : U
→ X, the numerical domain U is called
the domain of P and is denoted by dom(P). If U is an n-domain we say that P is
a n-parametrization.
1.2. Diffeology and diffeological spaces. Let X be a set. A diffeology on
X is a set
D of parametrizations in X, that is D ⊂ Param(X), such that
D1. Covering
Every point of X is contained in the range of some P
∈ D.
D2. Locality
If P
∈ Param(X) and if for any r ∈ dom(P) there exists a
domain V such that r
∈ V ⊂ dom(P) and P V ∈ D, then P ∈ D.
D3. Smooth compatibility
If P
∈ D and F is a C
∞
mapping from some
domain V to dom(P), then P
◦ F ∈ D.
Equipped with a diffeology
D, X is a diffeological space. To make it short, the
elements of the diffeology are called the plots of the diffeological space. So, the plots
of a diffeological space are the elements of its diffeology. Note that the definition
of a diffeology does not assume any pre-existing structure on the underlying set.
1.3. Smooth maps and diffeomorphisms. Let X and X
be two sets e-
quipped with the diffeologies
D and D
respectively. A map F : X
→ Y is said to
be smooth if for each P
∈ D we have F◦P ∈ D
. The set of smooth maps from X to Y
is denoted by
C
∞
(X, Y). A bijective map F : X
→ Y is said to be a diffeomorphism
if both F and F
−1
are smooth. The set of diffeomorphisms of X is a group denoted
by Diff(X). Diffeological spaces are the objects of the category
{Diffeology} whose
morphisms are smooth maps, and isomorphisms are diffeomorphisms.
1.4. Quotients and subspaces. The category
{Diffeology} is stable by set
theoretic operations. Products, sums of diffeological spaces are naturally diffeolog-
ical spaces, but also quotient and subsets. Let
∼ be any equivalence relation on
a diffeological space X, let Q = X/
∼ and π : X → Q be the projection. There
exists a natural quotient diffeology on Q, for which π is smooth, defined by the
parametrizations which can be lifted locally along π by elements of
D. That is, a
parametrization P : U
→ Q is a plot if and only if for each r ∈ U there exists a
domain V containing r and a plot φ : V
→ X such that P V = π ◦ φ. On the other
5
6
1. FEW WORDS ABOUT DIFFEOLOGY
hand, there exists on every subset A
⊂ X a natural subset diffeology, for which the
inclusion is smooth, defined by the elements of
D which take their values in A.
In the first case, the map π : X
→ Q is a subduction, and in the second case the
injection j
A
: A
→ X is an induction.
1.5. Functional diffeology. Let X and X
be two diffeological spaces. There
exists on C
∞
(X, X
) a diffeology called the functional diffeology whose plots are
parametrizations P such that (r, x)
→ P(r)(x), defined on dom(P) × X to X
is
smooth.
This diffeology is the coarsest (e.g.
largest) diffeology such that the
evaluation map (f, x)
→ f(x), from C
∞
(X, X
)
× X to X
, is smooth. In particular,
the set of paths C
∞
(R, X), denoted by Paths(X), is naturally a diffeological space,
equipped with the functional diffeology.
1.6. Differential forms. Let X be a diffeological space. A differential k-form
on X, for k
≥ 0, is a mapping α which associates to each plot P of X a smooth k-
form on dom(P). That is, if P is an n-plot, α(P) belongs to C
∞
(dom(P), Λ
k
(R
n
)).
And satisfying the following compatibility condition: for any plot P of X and for
any smooth parametrization F : V
→ dom(P),
α(P
◦ F) = F
∗
(α(P)).
The space Ω
k
(X) of differential k-forms on X is naturally a vector space. It carries
also a natural diffeology called again functional diffeology for which the ordinary
vectorial operations are smooth. A parametrization r
→ α
r
of Ω
k
(X), defined on
a domain U, is a plot for this functional diffeology if and only if for any n-plot
P : V
→ X, the parametrization (r, s) → α
r
(P)
s
, defined on U
× V with values in
Λ
k
(R
n
), is smooth.
Note that, if it is necessary for a differential form to check the compatibility
condition on all the plots of the space, two differential k-forms coincide if and only
if they coincide on the k-plots. In other words, the value of a differential k-form is
characterized by its values on the k-plots.
The exterior differential of a k-form α is the differential (k + 1)-form defined
by
dα(P) = d(α(P)).
Let f : X
→ X
be a smooth map between diffeological spaces, let α
be a differ-
ential k-form on X
, the pullback f
∗
(α
) is the differential k-form on X defined by
f
∗
(α
)(P) = α
(f
◦ P). The exterior differential and the pullback are linear and
smooth operations.
Let F :
I → Diff(X) be a 1-plot defined on a open interval and centered at the
identity 1
X
, that is 0
∈ I and F(0) = 1
X
. Let α be a differential k-form on X, with
k > 0. The contraction i
F
(α) of α by F is the (k
− 1)-differential form defined by
i
F
(α)(P)
r
(v
2
, . . . , v
k
) = α
t
r
→ F(t)(P(r))
(
0
r
)
1
0
· · ·
0
0
v
2
· · · v
k
,
where P is any plot of X, r
∈ dom(P), and v
2
, . . . , v
k
are any k
− 1 vectors of R
n
,
n being the dimension of the plot P.
Let us continue with the 1-plot F :
I → Diff(X) defined on I and centered at
1
X
. Let α be a differential k-form on X, with k
≥ 0. There exists a differential

1. FEW WORDS ABOUT DIFFEOLOGY
7
k-form on X, called the Lie derivative of α by F, defined by
£
F
(α)(P)
r
=
∂α(F(t)
◦ P)
r
∂t
t=0
for every n-plot P and every r
∈ dom(P). Note that α(F(t)◦P) is just F(t)
∗
(α)(P),
and regarded as a function of t is smooth from
I to Λ
k
(R
n
), so the derivative with
respect to t makes sense. Now, the so called classical Cartan formula extends to
diffeology and we have, for any differential k form α, with k > 0,
£
F
(α) = d[i
F
(α)] + i
F
(dα).
Let us fix now some vocabulary we shall use in the later paragraphs. We call
automorphism of a differential k-form α on X any diffeomorphism ϕ of X which
preserves α, that is ϕ
∗
(α) = α. The set of all the automorphisms of the form α is
a group denoted by Diff(X, α),
Diff(X, α) =
{ϕ ∈ Diff(X) | ϕ
∗
(α) = α
}.
The group Diff(X, α) will be called the group of automorphisms of α, and any of
its subgroups will be called a group of automorphisms of α.
1.7. Chain-Homotopy operator. Let X be a diffeological space. Let ˆ
0 and
ˆ
1 be the maps defined on Paths(X) to X by
ˆ
0(p) = p(0)
and
ˆ
1(p) = p(1).
There exists a smooth linear operator K, called Chain-Homotopy operator such that,
for any integer k > 0,
K : Ω
k
(X)
→ Ω
k
−1
(Paths(X))
and
K
◦ d + d ◦ K = ˆ1
∗
− ˆ0
∗
.
The value of the chain-homotopy operator K on a differential k-form α is given by
the following formulas. For k = 1, Kα is a real function
K(α)(p) =
1
0
α(p)
t
(1) dt
with
α
∈ Ω
1
(X)
and
p
∈ Paths(X).
For k > 1, let P : U
→ Paths(X) be a n-plot, let r ∈ U and let v
2
, . . . , v
k
be k
− 1
vectors of R
n
, so
(Kα)(P)
r
(v
2
, . . . , v
k
) =
1
0
α
s
r
→ P(r)(s + t)
(
0
r
)
1
0
· · ·
0
0
v
2
· · · v
k
dt.
The chain-homotopy operator satisfies a natural equivariance relation. Let X
be
another diffeological space and f
∈ C
∞
(X, X
). Let f
∗
: Paths(X)
→ Paths(X
) be
the natural map f
∗
: p
→ f ◦ p. Let K
X
and K
X
be the chain-homotopy operators
associated to X and X
, so
K
X
◦ f
∗
= (f
∗
)
∗
◦ K
X
.
In particular, if X = X
and if f preserves a differential k-form α, that is f
∗
(α) = α,
then f
∗
preserves the differential (k
− 1)-form K(α), that is (f
∗
)
∗
(Kα) = Kα.

CHAPTER 2
Diffeological groups and momenta
Diffeological groups have been first introduced as « groupes diff´
erentiels » by
Souriau in [Sou81], [Sou84]. They are, with respect to diffeological spaces, what
Lie groups are to manifolds. We remind here their definition. Then, we propose a
diffeological equivalent of the « dual of the Lie algebra » as the space of invariant
1-forms on the group. We don’t consider any duality with a putative diffeological
Lie algebra. This is the simpler and the more natural way to work with coadjoint
action and coadjoint orbits in diffeology.
2.1. Diffeological groups. Let G be a group equipped with a diffeology
D.
We say that G is a diffeological group, or
D is a group diffeology, if and only if the
multiplication as well as the inversion are smooth. That is,
[(g, g
)
→ gg
]
∈ C
∞
(G
× G, G) and [g → g
−1
]
∈ C
∞
(G, G).
Note that if G is a standard manifold, this definition is nothing but the definition
of Lie groups. Note that any subgroup of a diffeological group, equipped with the
subset diffeology, is a diffeological group. As well, the quotient of any diffeological
group by a normal subgroup is a diffeological group for the quotient diffeology. We
denote by Hom
∞
(G, G
) the space of smooth homomorphisms from G to another
diffeological group G
.
An important example of diffeological group is the groups of all the diffeomor-
phisms of a diffeological space X, equipped with the functional diffeology of group
of diffeomorphisms. This diffeology is the coarsest group diffeology on Diff(X)
such that the evaluation map (f, x)
→ f(x) is smooth. A parametrization P : U →
Diff(X) is a plot if and only if the maps (r, x)
→ P(r)(x) and (r, x) → P(r)
−1
(x)
are smooth.
2.2. Covering diffeological groups. Let ˆ
G and G be two diffeological
groups. We say that a subduction pr : ˆ
G
→ G is a group covering if and only
if pr is an homomorphism and the fiber K = pr
−1
(1
G
) is discrete
. Let G be a
connected diffeological group. Its universal covering ˜
G has a natural structure of
diffeological group such that the subduction π : ˜
G
→ G is an homomorphism. The
first homotopy group π
1
(G) = ker(π) is a discrete invariant subgroup of ˜
G, so π is
a group covering. Any other connected covering pr : ˆ
G
→ G is the quotient of the
universal covering by a subgroup K of π
1
(G). If the subgroup K is normal then pr
is a group covering.
1
Let us remind that discrete means that the plots (here the plots for the subset diffeology)
are locally constant.
9
10
PATRICK IGLESIAS-ZEMMOUR
Proof.
This property has been stated originally in [Sou84], [Don84], but let
us remind the general construction given in [Igl85]. Let X be a connected diffeo-
logical space, let x
0
be a point of X, chosen at the base point. Let Paths(X, x
0
) be
the space of paths starting at x
0
. First of all, the end map ˆ
1 : p
→ p(1), defined
on Paths(X, x
0
) is a subduction. The quotient of Paths(X, x
0
) by the fixed ends
homotopy relation is exactly the universal covering pointed by the constant map
ˆ
x
0
: t
→ x
0
, over the pointed space (X, x
0
). The fiber over x
0
is the homotopy
group π
1
(X, x
0
). Now if X = G we choose the identity 1
G
as base point. Thus,
the multiplication of paths (p, p
)
→ [t → p(t) · p
(t)] defines on ˜
G a group mul-
tiplication such that the projection π : ˜
G
→ G, defined by π(class(p)) = ˆ1(p), is
an homomorphism. The kernel of this morphism is clearly the fiber over 1
G
, that
is π
1
(G). Now, the kernel of an homomorphism is always an invariant subgroup.
And, since π is a covering, π
−1
(1
G
) is discrete. This last points are general results
of the diffeological theory of homotopy [Igl85].
2.3. Smooth actions of a diffeological group. Let G be a diffeological
group. Let X be a diffeological space. Let the group Diff(X), of all the diffeomor-
phisms of X, be equipped with the functional diffeology of group of diffeomorphisms.
A smooth action of G on X, or simply an action of G on X, is a smooth homomor-
phism ρ from G to Diff(X), that is ρ
∈ Hom
∞
(G, Diff(X)). Let us fix or remind
some vocabulary used in the following.
(1) We says that the action is effective if ker(ρ) =
{1
G
}.
(2) The orbits of G are the subsets ρ(G)(x) =
{ρ(g)(x) | g ∈ G}, where x ∈ X.
(3) We call orbit maps of a point x
∈ X, the smooth map ˆx : G → X, defined
by ˆ
x : g
→ ρ(g)(x).
(4) The stabilizer St
ρ
(x) of a point x
∈ X is the subgroup of G defined by the
equation ˆ
x(g) = x, g
∈ G.
(5) We say that X is homogeneous for the action ρ of G, or that X is an
homogeneous space of G, for ρ, if and only if the orbit map ˆ
x of some
point x
∈ X is a subduction, thus for every point. In this case, ˆx is
a principal fibration [Igl85] with structure group the stabilizer St
ρ
(x).
That is X
G/St
ρ
(x), where g
∼ gh with h ∈ St
ρ
(x).
Let α be a differential k-form on X. We say that G acts by automorphisms on (X, α)
if ρ takes it values in Diff(X, α). That is, if ρ(G) is a group of automorphisms of
the differential form α.
2.4. Covering smooth actions. Let X be a connected diffeological space.
Let G be a connected diffeological group. Let ρ : G
→ Diff(X) be a smooth
action of G on X. Thus, ρ takes its values in the identity component Diff(X)
◦
=
comp(1
X
)
⊂ Diff(X). So, there exists a unique smooth action ˜ρ of the universal
covering ˜
G of G on the universal covering ˜
X of X, covering ρ.
G
Diff(X)
◦
-
ρ
G
Diff(X)
◦
-
˜
ρ
?
π
G
?
π
Diff(X)
Proof.
The map ρ
◦π is smooth and
G is simply connected. So, thanks to the
monodromy theorem [Igl85], there exists a unique lifting ˜
ρ of ρ
◦ π mappings the

2. DIFFEOLOGICAL GROUPS AND MOMENTA
11
identity of ˜
G to the identity of
Diff(X)
◦
. Now, this lifting is an homomorphism
because its restriction on ker(π
G
) and its projection ρ are both homomorphisms.
2.5. Left, right and adjoint actions of a group onto itself. Let G be a
diffeological group. We denote by L(g) and R(g) the left and right actions of G onto
itself.
For all g
∈ G,
L(g) : g
→ gg
R(g) : g
→ g
g.
Note that the « right action » is in fact an anti-action. That is, R(gg
) = R(g
)
◦R(g).
The adjoint action of G onto itself is denoted by Ad, and is defined by:
For all g
∈ G, Ad(g) : k → gkg
−1
= L(g)
◦ R(g
−1
)(k).
The maps L and Ad are smooth homomorphisms from G to Diff(G), equipped
with the diffeology of group of diffeomorphisms. The map R is a smooth anti-
homomorphism from G to Diff(G).
2.6. Momenta of a diffeological group. We call left momentum — or sim-
ply momentum — of a diffeological group G, any 1-form of G, invariant by the left
action of G onto itself. We denote by
G
∗
the space of momenta of G. The space of
momenta of a diffeological group is naturally a diffeological vector space, equipped
with the functional diffeology. So,
G
∗
=
{α ∈ Ω
1
(G)
| For all g ∈ G, L(g)
∗
(α) = α
}.
Note that, in spite of what the notation
G
∗
suggests, the space of momenta of a
diffeological group is not defined by some duality. This notation is chosen here just
to remind us the connection with the dual of the Lie algebra in the case of Lie
groups.
2.7. Momenta and connectedness. Let G be a diffeological group. Let G
◦
be the identity component of G, that is G
◦
= comp(1
G
)
⊂ G. So, the pullback
j
∗
:
G
∗
→ G
◦*
of the injection j : G
◦
→ G is an isomorphism. This property is
quite natural but needed to be checked up in our context of diffeological groups.
Note
— Said differently, the space of momenta of a connected diffeological
group, or any of its extensions by a discrete group, coincide. In particular, the only
momentum of a discrete group is the zero momentum.
Proof.
Let us check first the injectivity. Let α
∈ G
∗
such that j
∗
(α) = 0, and
let P : U
→ G be a plot. Let r
0
∈ U and let B ⊂ U be a small open ball centered
at r
0
. Let g
0
= P(r
0
). Since B is connected, since L(g
−1
0
)
◦ P(r
0
) = 1
G
, and thanks
to the smoothness of group operations, the parametrization Q = [L(g
−1
0
)
◦ P] B
is a plot of G
◦
. So, α(Q) = 0. But, α(Q) = α(L(g
−1
0
)
◦ (P B)) = L(g
−1
0
)
∗
(α)(P
B) = α(P
B). Thus, α(P B) = 0. Since α vanishes locally at each point of U,
α = 0. And, j
∗
is injective. Now, let us prove the surjectivity. Let α
∈ G
◦*
. For
any component G
i
of G, let us choose an element g
i
∈ G
i
, and the identity for the
identity component. Let P : U
→ G be a plot, an let us assume that U is connected.
So, P(U) is contained in one connected component of G, let us say the component
G
i
. Let us define then, ¯
α(P) = α(R(g
−1
i
)
◦ P). Since R(g
−1
i
)
◦ P(r) ∈ G
◦
for all
r
∈ U, this is well defined. Now, since any plot is the sum of its restrictions on the
components of its domain, the map ¯
α extends naturally to every plot of G. Now,
let P : U
→ G be a plot, let V be a domain, and let F ∈ C
∞
(V, U). Let s
0
∈ V, let
V
0
be the component of s
0
in V, let r
0
= F(s
0
), and let U
0
be the component of
12
PATRICK IGLESIAS-ZEMMOUR
r
0
in U. Let G
i
be the component of P
◦ F(s
0
) = P(r
0
) in G. We have, ¯
α((P
◦ F)
V
0
) = ¯
α((P
U
0
)
◦ (F V
0
)) = α(R(g
−1
i
)
◦ (P U
0
)
◦ (F V
0
)) = α([R(g
−1
i
)
◦ (P
U
0
)]
◦(F V
0
)) = (F
V
0
)
∗
[α(R(g
−1
i
)
◦(P U
0
)] = (F
V
0
)
∗
[ ¯
α(P
U
0
)]. So locally,
¯
α(F
◦ P) =
loc
F
∗
( ¯
α(P)). And if it is satisfied locally, it is satisfied globally, thus
¯
α(F
◦ P) = F
∗
( ¯
α(P)). The map ¯
α is a well defined differential 1-form on G. Now,
let us check that ¯
α is invariant by left multiplication. Let g
∈ G, let P : U → G be
a plot, let r
0
∈ U, let U
0
be the component of r
0
in U, let G
i
be the component
of P(r
0
) in G, so P(U
0
)
⊂ G
i
. We have, L(g)
∗
( ¯
α(P
U
0
)) = ¯
α(L(g)
◦ (P U
0
)) =
α(R(g
−1
i
)
◦ L(g) ◦ (P U
0
)) = α(L(g)
◦ R(g
−1
i
)
◦ (P U
0
)) = [L(g)
∗
(α)](R(g
−1
i
)
◦ (P
U
0
)) = α(R(g
−1
i
)
◦ (P U
0
)) = ¯
α(P
U
0
). So locally, L(g)
∗
( ¯
α)(P) =
loc
¯
α(P), and
therefore globally. So, L(g)
∗
( ¯
α) = ¯
α, thus ¯
α is an element of
G
∗
, which coincide
with α on G
◦
.
2.8. Momenta of coverings of diffeological groups. Let G be a diffeo-
logical group, let pr : ˆ
G
→ G be some group covering, see Subsection 2.2. Let G
∗
and ˆ
G
∗
be the spaces of momenta of G and ˆ
G. So, the pullback pr
∗
:
G
∗
→ ˆG
∗
is a
smooth linear isomorphism.
Proof.
Thanks to Subsection 2.7, it is sufficient to assume that ˆ
G and G
are connected. And thanks to Subsection 2.2, it is sufficient to prove this for the
universal covering π : ˜
G
→ G. Now, π
∗
is obviously linear, let us show that π
∗
is
surjective. Let ˜
α
∈ G
∗
. The group G is isomorphic to
G/π
1
(G), with respect to
the left action of π
1
(G). That is ˜
g
∼ k˜g, for all k ∈ π
1
(G). Now, let ˜
α
∈ G
∗
, ˜
α
is left invariant by
G, thus by π
1
(G). That is, for all k
∈ π
1
(G), L(k)
∗
( ˜
α) = ˜
α.
But, since π
1
(G) = ker(π) is discrete, this is sufficient for the existence of a 1-
form α on G such that ˜
α = π
∗
(α). Now, let ˜
g
∈
G and g = π(˜
g). Since π is
an homomorphism, π
◦ L(˜g) = L(g) ◦ π. So, on one hand we have L(˜g)
∗
( ˜
α) =
L(˜
g)
∗
(π
∗
(α)) = (π
◦ L(˜g))
∗
(α) = (L(g)
◦ π)
∗
(α) = π
∗
(L(g)
∗
(α)). And, on the other
hand, we have L(˜
g)
∗
( ˜
α) = ˜
α = π
∗
(α). Hence, π
∗
(L(g)
∗
(α)) = π
∗
(α). But, since π is
a subduction, L(g)
∗
(α) = α. Thus, α
∈ G
∗
, and the map π
∗
is surjective. Now, let
˜
α and ˜
β be such that π
∗
( ˜
α) = π
∗
( ˜
β). But, since π is a subduction, ˜
α = ˜
β. Finally,
π
∗
is injective. Finally, since the pullback is a smooth operation, π
∗
:
G
∗
→ G
∗
is a
smooth linear isomorphism.
2.9. Linear coadjoint action and coadjoint orbits. Let G be a diffeolog-
ical group and let
G
∗
be the space of its momenta. The pushforward Ad(g)
∗
(α)
of a momentum α
∈ G
∗
, by the adjoint action of any element g of G, is again a
momentum of G, that is again a left-invariant 1-form. This defines a linear smooth
action of G on
G
∗
called coadjoint action, and denoted by Ad
∗
.
Ad
∗
: (g, α)
→ Ad(g)
∗
(α) = Ad(g
−1
)
∗
(α).
We check immediately that for all g, g
in G, Ad
∗
(gg
) = Ad
∗
(g)
◦ Ad
∗
(g
), and
that Ad
∗
(g) is linear. Note that, since α is left-invariant, Ad
∗
(g)(α) = R(g)
∗
(α).
The orbit of α by G is by definition a coadjoint orbit of G, and it will be denoted
by
O
α
or Ad
∗
(G)(α) =
{Ad
∗
(g)(α)
| g ∈ G}.
The orbit
O
α
can be regarded as a subset of
G
∗
, but also as the quotient of the
group G by the stabilizer of the moment α,
O
α
G/St
G
(α), with St
G
(α) =
{g ∈ G | Ad(g)
∗
(α) = α
}.
2. DIFFEOLOGICAL GROUPS AND MOMENTA
13
Note
— The orbit
O
α
can be equipped with the subset diffeology of the functional
diffeology of
G
∗
, or with the quotient diffeology of G. There is no reason a priori that
these two diffeologies coincide. But it could be interesting however to understand
in which conditions they do.
2.10. Affine coadjoint actions and (Γ, θ)-coadjoint orbits. Let G be a
diffeological group, and
G
∗
be the space of its momenta. Let Γ
⊂ G
∗
be a subgroup
of (
G
∗
, +), invariant by the coadjoint action Ad
∗
. That is, for all g
∈ G,
Ad
∗
(g)(Γ)
⊂ Γ.
So, the coadjoint action of G on
G
∗
project to the quotient
G
∗
/Γ, regarded as an
abelian group, on a smooth action. Let us denote this action by Ad
Γ
∗
. For every
g
∈ G and τ ∈ G
∗
/Γ,
Ad
Γ
∗
(g)(τ ) = class(Ad
∗
(g)(μ))
with
τ = class(μ)
∈ G
∗
/Γ.
Now, let θ be a smooth map from G to the space
G
∗
/Γ, such that for any pair g
and g
of elements of G,
θ(gg
) = Ad
Γ
∗
(g)(θ(g
)) + θ(g).
Such maps are formally known, in the literature as twisted 1-cocycles of G with
values in
G
∗
/Γ [Kir74]. We shall call them cocycles of G, with values in
G
∗
/Γ, or
simply (
G
∗
/Γ)-cocycles. A cocycle θ is a coboundary if and only if there exists a
constant c
∈ G
∗
/Γ, such that θ = Δc, with
Δc : g
→ Ad
Γ
∗
(g)(c)
− c.
Cocycles modulo coboundaries define a cohomology group denoted by H
1
(G,
G
∗
/Γ).
Every such cocycle θ defines a new action of G on
G
∗
/Γ by
Ad
Γ,θ
∗
: (g, τ )
→ Ad
Γ
∗
(g)(τ ) + θ(g).
The orbits for these actions will be called the (Γ, θ)-coadjoint orbits of G. If Γ =
{0}
we shall call them simply θ-coadjoint orbits. If θ = 0 we shall call them simply
Γ-coadjoint orbits. And, if Γ =
{0} and θ = 0 we find again the ordinary coadjoint
orbits defined in Subsection 2.9.
2.11. Closed momenta of a diffeological group. Let G be a diffeological
group, and let
G
∗
be its space of momenta. Let us denote by Z the subset of closed
momenta of G, and by B the subset of exact momenta of G. That is,
Z = Z
1
DR
(G)
∩ G
∗
and
B = B
1
DR
(G)
∩ G
∗
.
1) Let us assume that G is connected, and let ˜
G be its universal covering. By
factorization, the chain-homotopy operator defines a canonical De Rham isomor-
phism k, from the space of closed momenta Z to the vector space Hom
∞
( ˜
G, R).
That is, for all ζ
∈ Z,
k(ζ) = [˜
g
→ Kζ(p)], where Kζ(p) =
p
ζ
and
˜
g = class(p).
Here, we have denoted by class(p) the fixed ends homotopy class of the path
p
∈ Paths(G, 1
G
). The subspace of exact momenta B identifies, through the iso-
morphism k, to the subspace Hom
∞
(G, R).
Z
Hom
∞
( ˜
G, R)
and
B
Hom
∞
(G, R).
14
PATRICK IGLESIAS-ZEMMOUR
2) Let G be any diffeological group connected or not. Let ζ
∈ G
∗
, if ζ is closed
then ζ is Ad
∗
invariant.
For all ζ
∈ G
∗
, dζ = 0
⇒ Ad
∗
(g)(ζ) = ζ, for all g
∈ G.
Note
— Every homomorphism from a diffeological group G to an abelian
group factorizes through the abelianized group Ab(G) = G/[G, G], where [G, G] is
the normal subgroup of the commutators of G. So actually, Z
Hom
∞
(Ab( ˜
G), R)
and B
Hom
∞
(Ab(G), R).
Proof.
1) Let π : ˜
G
→ G be the universal covering defined in Subsection
2.2. Since ˜
G is simply connected, every closed 1-form is exact [Piz05]. Thus, for
every ζ
∈ Z, the pullback π
∗
(ζ) is exact. So, let F be a primitive of π
∗
(α), that
is dF = π
∗
(α). We can even fix uniquely F by choosing F(1
˜
G
) = 0. Actually
F is defined by integrating the form ζ along the paths starting at the identity,
that is F = k(ζ). Since α is left-invariant and since the projection π commutes
with the left actions, on G and ˜
G, π
∗
(α) is left invariant. So, for every ˜
g
∈ ˜G,
d[F
◦ L(˜g)] = dF. Since ˜G is connected, for every ˜g, ˜g
in ˜
G, F(˜
g˜
g
) = F(˜
g
) + f (˜
g).
Where f is a smooth real function. But since F(1
G
) = 0, f (˜
g) = F(˜
g), and F is
a smooth homomorphism from ˜
G to R. So, for every closed momentum ζ
∈ Z,
there exists a unique homomorphism F
∈ Hom
∞
( ˜
G, R) such that ζ = π
∗
(dF). The
homomorphism k is thus injective, and it is obviously surjective. Now, if ζ is exact,
that is if ζ = df , then F = π
∗
(f ). So, k(B) = π
∗
(Hom
∞
(G, R))
Hom
∞
(G, R).
2) Thanks to Subsection 2.7 we can assume that G is connected. Now, for every
˜
g, ˜
g
in ˜
G, F(˜
g˜
g
˜
g
−1
) = F(˜
g
). That is, F
◦ Ad(˜g) = Ad(˜g)
∗
(F) = F, for all ˜
g
∈ ˜G.
So, d[Ad(˜
g)
∗
(F)] = dF, or Ad
∗
(˜
g)(π
∗
(ζ)) = π
∗
(ζ), or (π
◦ Ad(˜g))
∗
(ζ) = π
∗
(ζ). But
π
◦ Ad(˜g) = Ad(g) ◦ π, where g = π(˜g). So, π
∗
(Ad(g)
∗
(ζ)) = π
∗
(ζ). And since π
is a subduction, Ad(g)
∗
(ζ) = ζ. That is, Ad
∗
(g)(ζ) = ζ.
2.12. Equivalence between right and left momenta. Let G be a diffeo-
logical group, and let
G
denote the space of right momenta of the group G. That
is, the space of 1-forms of G, invariant by the right multiplication.
G
=
{α ∈ Ω
1
(G)
| For all g ∈ G, R(g)
∗
(α) = α
}.
There exists a natural linear isomorphism flip :
G
∗
→ G
equivariant with respect
to the coadjoint action. That is, the following diagram commutes.
G
∗
G
-
flip
G
∗
G
-
flip
?
Ad
∗
(g)
?
Ad
∗
(g)
In other words, there is no reason to prefer left or right momenta of a diffeological
group. The particularization of left momenta comes because we are dealing with
actions of groups and not anti-actions.
Proof.
Let us denote by a dot the multiplication in G. Let α be any left
p-momentum of G. Let P : U
→ G be a n-plot. Let ¯α(P) be defined by
¯
α(P)(r) = α
s
→ P(s) · P(r)
−1
(s = r).
2. DIFFEOLOGICAL GROUPS AND MOMENTA
15
where r belongs to U. Let us show that ¯
α defines a p-form of G. First of all let us
remark that ¯
α(P) is the restriction of the 1-form α((s, r)
→ P(s) · P(r)
−1
) to the
diagonal s = r. Thus, ¯
α(P) is a smooth 1-form of U.
Now, let us prove that ¯
α is a well defined 1-form on G, according to the
definition of differential forms in diffeology.
let F : V
→ U be a smooth m-
parametrization. Let v be a point of V, and δv be a vector of R
m
. We have:
¯
α(P
◦ F)
v
(δv)
=
α
s
→ (P ◦ F)(s) · (P ◦ F)(v)
−1
v
(δv)
=
α
s
→ F(s) → (P ◦ F)(s) · (P ◦ F)(v)
−1
v
(δv)
=
α
s
→ r = F(s) → P(r) · P(F(v))
−1
v
(δv)
=
α
r
→ P(r) · P(F(v))
−1
◦ F
v
(δv)
=
F
∗
α
r
→ P(r) · P(F(v))
−1
v
(δv)
=
α
r
→ P(r) · P(F(v))
−1
F(v)
(D(F)(v)(δv))
=
¯
α(P)
F(v)
(D(F)(v)(δv))
=
F
∗
[ ¯
α(P)]
v
(δv).
Then, let us check that ¯
α is right-invariant, that is ¯
α
∈ G
. For all g
∈ G, we have:
R(g)
∗
( ¯
α)(P)
r
(δr)
=
¯
α(R(g)
◦ P)
r
(δr)
=
α
s
→ (R(g) ◦ P)(s) · (R(g) ◦ P)(r)
−1
r
(δr)
=
α
s
→ P(s) · g · (P(r) · g)
−1
r
(δr)
=
α
s
→ P(s) · g · g
−1
· P(r)
−1
r
(δr)
=
α
s
→ P(s) · P(r)
−1
r
(δr)
=
¯
α(P)
r
(δr)
So, we have defined a map flip : α
→ ¯α, from G
∗
to
G
. Let us prove now that flip
is bijective. Let β = ¯
α. Let P : U
→ G be a plot, and let us define ¯β by
¯
β(P)(r) = β[s
→ P(r)
−1
· P(s)](s = r),
for all r
∈ U. So, we have:
¯
β(P)(r)
=
β
s
→ P(r)
−1
· P(s)
(s = r)
=
¯
α
s
→ P(r)
−1
· P(s)
(s = r)
=
α
s
→ P(r)
−1
· P(s) · P(r)
−1
· P(r)
(s = r)
=
α
s
→ P(r)
−1
· P(s)
(s = r)
=
L(P(r)
−1
)
∗
(α) [s
→ P(s)] (s = r)
=
α(P)(r).
Hence, ¯
β = α. Thus, flip is bijective. And, flip is clearly linear. Therefore, flip
is a linear isomorphism from
G
∗
to
G
. It is easy to check that it is a smooth
isomorphism.
Finally, let us check that flip is equivariant under the coadjoint action. Let
α
∈ G
∗
, let P : U
→ G be a plot and r ∈ U. On one hand we have,
flip[Ad(g)
∗
(α)](P)
r
=
flip[R(g)
∗
(α)](P)
r
=
R(g)
∗
(α)[s
→ P(s) · P(r)
−1
]
r
=
α(s
→ P(s) · P(r)
−1
· g)
r
.

16
PATRICK IGLESIAS-ZEMMOUR
And, on the other hand:
[Ad(g)
∗
(flip(α))](P)
r
=
[L(g)
∗
(flip(α))](P)
r
=
flip(α)(L(g
−1
)
◦ P)
r
=
α[s
→ (L(g
−1
)
◦ P)(s) · (L(g
−1
)
◦ P)(r))
−1
]
r
=
α[s
→ g
−1
· P(s) · P(r)
−1
· g]
r
=
L(g
−1
)
∗
(α)[s
→ P(s) · P(r)
−1
· g]
r
=
α[s
→ P(s) · P(r)
−1
· g]
r
Therefore, flip
◦ Ad(g)
∗
= Ad(g)
∗
◦ flip for all g ∈ G.
CHAPTER 3
The paths moment map
We shall now introduce the notion of moment map step by step. The first step
consists to define the paths moment map.
3.1. Definition of the paths moment map. Let X be a diffeological space
and ω be a closed 2-form defined on X. Let G be a diffeological group and ρ : G
→
Diff(X) be a smooth action. Let us denote by the same letter the natural action
of G on Paths(X), induced by the action ρ of G on X. That is, for all g
∈ G, for
all p
∈ Paths(X),
ρ(g)(p) = ρ(g)
◦ p = [t → ρ(g)(p(t))].
Let us assume now that the action ρ of G on X preserves ω. That is, for all g
∈ G,
ρ(g)
∗
(ω) = ω
or
ρ
∈ Hom
∞
(G, Diff(X, ω)).
Let K be the chain-homotopy operator, so Kω is a 1-form of Paths(X), and the
action of G on Paths(X) preserves the 1-form Kω. This is a consequence of the
variance of the chain-homotopy operator, see Subsection 1.7. Thus, for all g
∈ G,
ρ(g)
∗
(Kω) = Kω.
Now, let p be any paths of X, and let ˆ
p : G
→ Paths(X) be the orbit map. So, the
pullback ˆ
p
∗
(Kω) is a left-invariant 1-form of G, that is an element of
G
∗
. The map
Ψ : Paths(X)
→ G
∗
defined by
Ψ(p) = ˆ
p
∗
(Kω),
is smooth with respect to the functional diffeology, Ψ
∈ C
∞
(Paths(X),
G
∗
). The
map Ψ will be called the paths moment map.
3.2. Evaluation of the paths moment map. Let X be a diffeological space
and ω be a closed 2-form defined on X. Let G be a diffeological group and ρ be
a smooth action of G on X, preserving ω. Let p be a path in X. Thanks to the
explicit expression of the chain-homotopy operator given in Subsection 1.7, we get
the evaluation of the momentum Ψ(p) on any n-plot P of G,
(
♥)
Ψ(p)(P)
r
(δr) =
1
0
ω
s
u
→ (ρ ◦ P)(u)(p(s + t))
(
s=0
u=r
)
1
0
0
δr
dt,
for all r in dom(P) and all δr in R
n
. Now, as a differential 1-form, Ψ(p) is char-
acterized by its values on the 1-plots [Piz05]. So, let f : t
→ f
t
be a 1-plot of G
centered at the identity 1
G
, that is f
∈ Paths(G) and f(0) = 1
G
. For any t
∈ R,
let F
t
be the path in Diff(X, ω) — centered at the identity 1
X
— defined by
F
t
: s
→ ρ(f
−1
t
◦ f
t+s
).
17
18
PATRICK IGLESIAS-ZEMMOUR
So, we have
(
♣)
Ψ(p)(f )
t
(1) =
−
p
i
F
t
(ω) =
−
1
0
i
F
t
(ω)(p)
s
(1)ds,
where i
F
t
(ω) is the contraction of ω by F
t
, see Subsection 1.6.
But, as an invariant 1-form on G the moment Ψ(p) is characterized by its value
at the identity, that is for t = 0,
(
♦)
Ψ(p)(f )
0
(1) =
−
p
i
F
(ω) =
−
1
0
i
F
(ω)(p)
t
(1) dt
with
F = ρ
◦ f.
Note
— Let f
∈ Hom
∞
(R, G), so Ψ(p)(f ) is an invariant 1-form on R whose
coefficient is just
p
i
F
(ω). That is,
Ψ(p)(f ) = h
f
(p)
× dt where h
f
(p) =
−
p
i
F
(ω).
The smooth map h
f
: Paths(X)
→ R is the hamiltonian of f, or the hamiltonian
of the 1-parameter group f (R). Note also that, the map h : Hom
∞
(R, G)
→
C
∞
(Paths(X), R), defined above, is smooth.
Proof.
Let us prove
♥. Let us remind that for every p ∈ Paths(X) and every
g
∈ G, ˆp(g) = ρ(g)(p) = [t → ρ(g)(p(t))]. So, by definition
Ψ(p)(P)
r
(δr)
=
ˆ
p
∗
(Kω)
r
(δr)
=
Kω(ˆ
p
◦ P)
r
(δr)
=
1
0
ω
s
r
→ ˆp ◦ P(r)(s + t)
(
0
r
)
1
0
0
δr
dt
=
1
0
ω
s
r
→ (ρ ◦ P)(r)(p(s + t))
(
0
r
)
1
0
0
δr
dt.
Let us prove
♣. Let us apply the general formula ♥ for P = f. Introducing
u
= u
−t and s
= s + s
, using the compatibility property of ω(P
◦Q) = Q
∗
(ω(P))
3. THE PATHS MOMENT MAP
19
and the ρ(f
t
) invariance of ω, we get
Ψ(p)(f )
t
(1)
=
1
0
ω
s
u
→ ρ(f
u
)(p(s + s
))
(
s=0
u=t
)
1
0
0
1
ds
=
1
0
ω
s
u
→ ρ(f
t+u
)(p(s
))
s=s
u =0
1
0
0
1
ds
=
1
0
ω
s
u
→ ρ(f
t
◦ f
−1
t
◦ f
t+u
)(p(s
))
s=s
u =0
1
0
0
1
ds
=
1
0
ω
s
u
→ ρ(f
t
)
F
t
(u
)(p(s
))
s=s
u =0
1
0
0
1
ds
=
1
0
ω
s
u
→ F
t
(u
)(p(s
))
s=s
u =0
1
0
0
1
ds
=
1
0
ω
u
s
→ F
t
(u
)(p(s
))
u =0
s=s
0
1
1
0
ds
=
−
1
0
ω
u
s
→ F
t
(u
)(p(s
))
u =0
s =s
1
0
0
1
ds
=
−
1
0
i
F
t
(ω)(p)
s
(1)ds
=
−
p
i
F
t
(ω).
Let us prove the Note. Let f
∈ Hom
∞
(R, G). By definition of differential forms
and pullbacks, Ψ(p)(f ) = f
∗
(Ψ(p)), but since f is an homomorphism from R
to Diff(X, ω) and Ψ(p) is a left-invariant 1-form on Diff(X, ω), f
∗
(Ψ(p)) is an
invariant 1-form of R, so Ψ(p)(f ) = f
∗
(Ψ(p)) = a
× dt, for some real a. So,
Ψ(p)(f )
r
= Ψ(p)(f )
0
(1)
× dt = h
f
(p)
× dt, with h
f
(p) = Ψ(p)(f )
0
(1) =
−
p
i
F
(ω),
and dt is the canonical 1-form on R.
3.3. Variance of the paths moment map. Let X be a diffeological space
and ω be a closed 2-form defined on X. Let G be a diffeological group and ρ be
a smooth action of G on X, preserving ω. The paths moment map Ψ, defined in
Subsection 3.1, is equivariant under the action of G. That is, for all g
∈ G,
Ψ
◦ ρ(g)
∗
= Ad(g)
∗
◦ Ψ.
Proof.
Let us denote here the orbit map ˆ
p of every path p
∈ Paths(X) by L(p).
That is, L(p)(g) = ρ(g)
∗
(p) = ρ(g)
◦ p. So, Ψ(ρ(g)
∗
(p)) = Ψ(ρ(g)
◦ p) = (L(ρ(g) ◦
p)
∗
(Kω). But, L(ρ(g)
◦ p)(g
) = ρ(g
)(ρ(g)
◦ p) = ρ(g
g)
◦ p = L(p)(g
g) = L(p)
◦
R(g)(g
). Thus, L(ρ(g)
◦ p) = L(p) ◦ R(g), and Ψ(ρ(g)
∗
(p)) = (L(p)
◦ R(g))
∗
(Kω) =
R(g)
∗
(L(p)
∗
(K(p)) = R(g)
∗
(Ψ(p)). But since Ψ(p) is left-invariant, R(g)
∗
(Ψ(p)) =
Ad(g)
∗
(Ψ(p)), and Ψ(ρ(g)
∗
(p)) = Ad(g)
∗
(Ψ(p)).
3.4. Additivity of the paths moment map. Let X be a diffeological space
and ω be a closed 2-form defined on X. Let G be a diffeological group and ρ be
a smooth action of G on X, preserving ω. The paths moment map Ψ, defined in
20
PATRICK IGLESIAS-ZEMMOUR
Subsection 3.1, satisfies the following additive property: for any two juxtaposable
paths p and p
in X,
Ψ(p
∨ p
) = Ψ(p) + Ψ(p
)
and
Ψ(¯
p) =
−Ψ(p), with ¯p(t) = p(1 − t).
Proof.
This is a direct application of the expression given in Subsection 3.2
♦, and of the additivity of the integral of differential form on paths.
3.5. Differential of the paths moment map. Let X be a diffeological space
and ω be a closed 2-form defined on X. Let G be a diffeological group and ρ be
a smooth action of G on X, preserving ω. Let p be a path in X. So, the exterior
differential of the paths momentum Ψ(p) is given by
d(Ψ(p)) = ˆ
x
∗
1
(ω)
− ˆx
∗
0
(ω),
where x
0
= p(0) and x
1
= p(1), and the ˆ
x
i
denote the orbit maps.
Proof.
This is a direct application of the main property of the chain-homotopy
operator, d
◦ K + K ◦ d = ˆ1
∗
− ˆ0
∗
. Since dω = 0, we have d(Kω) = ˆ
1
∗
(ω)
− ˆ0
∗
(ω),
composed with ˆ
p
∗
, we get ˆ
p
∗
◦ d(Kω) = ˆp
∗
◦ ˆ1
∗
(ω)
− ˆp
∗
◦ ˆ0
∗
(ω). That is d(ˆ
p
∗
(Kω)) =
(ˆ
1
◦ ˆp)
∗
(ω)
− (ˆ0 ◦ ˆp)
∗
(ω). Thus, d(Ψ(p)) = ˆ
x
∗
1
(ω)
− ˆx
∗
0
(ω).
3.6. Homotopic invariance of the paths moment map. Let X be a dif-
feological space and ω be a closed 2-form defined on X. Let G be a diffeological
group and ρ be a smooth action of G on X, preserving ω. Let p
0
and p
1
be any two
paths in X. If p
0
and p
1
are fixed ends homotopic, then Ψ(p
0
) = Ψ(p
1
).
Proof.
Let s
→ p
s
be a fixed ends homotopy connecting p
0
to p
1
, for example
let p
s
(0) = x
0
and p
s
(1) = x
1
, for all s. Let f be a 1-plot of G centered at the
identity 1
G
, that is f (0) = 1
G
, and let F = ρ
◦ f. We use the fact that the moment
of paths is characterized by its value at the identity, Ψ(p
s
)(f )
0
(1) =
−
p
s
i
F
(ω),
see Subsection 3.2
♦. Let us differentiate this equality with respect to s,
∂
∂s
Ψ(p
s
)(f )
0
(1)
=
−δ
p
s
i
F
(ω),
with
δ =
∂
∂s
.
The variation of the integral of differential forms on chains gives
δ
p
s
i
F
(ω) =
1
0
d [i
F
(ω)](δp
s
) +
i
F
(ω)(δp
s
)
1
0
.
See [Piz05] for the definition of δp
s
and for the proof of this formula in diffeology.
Since the homotopy s
→ p
s
is a fixed end homotopy, δp
s
(0) = 0 and δp
s
(1) = 0,
thus the second summand of the right term vanishes. Now, the Cartan formula
writes £
F
(ω) = d[i
F
(ω)] + i
F
(dω), see Subsection 1.6. But ω is invariant under the
action of G, so £
F
(ω) = 0, and since dω = 0 we get d[i
F
(ω)] = £
F
(ω) = 0. So,
δ
p
s
i
F
(ω) = 0 and Ψ(p
0
) = Ψ(p
s
) = Ψ(p
1
), for all s.
3. THE PATHS MOMENT MAP
21
3.7. The holonomy group. Let X be a connected diffeological space, and
let ω be a closed 2-form defined on X. Let G be a diffeological group and ρ be a
smooth action of G on X, preserving ω. Let Ψ be the paths moment map defined
in Subsection 3.1. We define the holonomy Γ of the action ρ as
Γ =
{Ψ() | ∈ Loops(X)}.
(1) The holonomy Γ is an additive subgroup of the subspace of closed mo-
menta, Γ
⊂ Z (see Subsection 2.11). That is, for every elements γ and γ
of Γ,
dγ = 0
and
γ
− γ
∈ Γ.
(2) The paths moment map Ψ, restricted to Loops(X), factorizes through an
homomorphism from π
1
(X) to
G
∗
. Thus, Γ is an homomorphic image of
π
1
(X), or its abelianized Ab(π
1
(X)).
(3) In particular, every element γ of Γ is invariant by the coadjoint action of
G on
G
∗
. For all g in G,
Ad
∗
(g)(γ) = γ.
The holonomy Γ is the obstruction for the action ρ to be « hamiltonian ». Precisely,
the action of G on X will be said to be hamiltonian if and only if Γ =
{0}. Note that,
if the group G has no Ad
∗
-invariant 1-forms except 0, the action ρ is necessarily
hamiltonian, see Subsection 2.11.
Proof.
We get immediately that γ
∈ Γ is closed, by application of the differ-
ential of a path momentum: for all path p
∈ Paths(X), d(Ψ(p)) = ˆx
∗
1
(ω)
− ˆx
∗
0
(ω),
where x
0
= p(0) and x
1
= p(1), see Subsection 3.5. So, for any loop of X,
(0) = (1) and d(Ψ()) = 0. Now, let x
0
be any point of X. Thanks to Sub-
section 3.6, for every loop
∈ Loops(X, x
0
), the momentum Ψ() depends on
only through the its homotopy class. So Γ is the image of π
1
(X, x
0
). And, thanks
to the additive property of Ψ, see Subsection 3.4, the map class()
→ Ψ() is an
homomorphism. Now, since X is connected, for every other point x
1
of X, there
exists a path c connecting x
0
to x
1
, and let ¯
c = t
→ c(1 − t). Thanks to the
additive property, Ψ(¯
c
∨ ∨ c) = Ψ(¯c) + Ψ() + Ψ(c) = −Ψ(c) + Ψ() + Ψ(c) = Ψ().
And, since the map class()
→ class(¯c ∨ ∨ c) is a conjugation from π
1
(X, x
0
) to
π
1
(X, x
1
), Γ is the same homomorphic image of π
1
(X, x), for every point x
∈ X. So,
we proved the points 1 and 2, the third one is a direct consequence of Subsection
2.11.

CHAPTER 4
The 2-points moment map
The definition of the paths moment map leads immediately to the 2-points
moment map. The 2-points moment map satisfies a cocycle condition inherited
from the additive property of the paths moment map. This is the second step in
our general construction.
4.1. Definition of the 2-points moment map. Let X be a connected diffe-
ological space and ω be a closed 2-form defined on X. Let G be a diffeological group
and ρ be a smooth action of G on X, preserving ω. Let Ψ be the paths moment
map and Γ be the holonomy of the action ρ, see Subsection 3.1 and Subsection 3.7.
So, there exists a smooth map ψ : X
× X → G
∗
/Γ such that the following diagram
commutes.
X
× X
G
∗
/Γ
-
ψ
Paths(X)
G
∗
-
Ψ
?
ends
?
pr
where pr is the canonical projection from
G
∗
onto its quotient, and ends = ˆ
0
× ˆ1,
that is ends(p) = (p(0), p(1)). The map ψ
∈ C
∞
(X
× X, G
∗
/Γ) will be called the
2-points moment map.
(1) The 2-points moment map ψ satisfies the Chasles cocycle relation, for any
three points x, x
, x
of X,
(
♥)
ψ(x, x
) = ψ(x, x
) + ψ(x
, x
).
(2) The 2-points moment map ψ is equivariant under the action of G. That
is, for any g
∈ G, and any pair of points x and x
of X,
ψ(ρ(g)(x), ρ(g)(x
)) = Ad
Γ
∗
(g)(ψ(x, x
)).
Proof.
By construction ψ is defined by ψ(x, x
) = class
Γ
(Ψ(p)), where p
∈
Paths(X), x = p(0), x
= p(1), and class
Γ
(α) denotes the class of α
∈ G
∗
in
G
∗
/Γ.
The map ψ is smooth simply by general properties of subductions in diffeology.
Now, the first point is a direct consequence of the additive property of the paths
moment map, see Subsection 3.4. The second point is a direct consequence of the
equivariance of the paths moment map of the Ad
∗
invariance of Γ, see Subsection
3.3, and of the definition of the Ad
Γ
∗
action, see Subsection 2.10.
Note
— T. Ratiu and A. Weinstein have kindly pointed out that Condevaux,
Dazord and Molino [CDM88] proposed a similar construction in the case where X
is a manifold, G is a Lie group, and Γ is closed in
G
∗
.
23

CHAPTER 5
The moment maps
From the construction of the paths moment map of Subsection 3.1 and the 2-
points moment map of Subsection 4.1 we get the notion of (1-point) moment map.
This is the third step of our general construction, and the generalization of the
notion of moment map coming from classical symplectic geometry.
5.1. Definition of the moment maps. Let X be a connected diffeological
space and let ω be a closed 2-form defined on X. Let G be a diffeological group and
ρ be a smooth action of G on X, preserving ω. Let ψ be the 2-points moment map
defined in Subsection 4.1. There exists always a smooth map μ : X
→ G
∗
/Γ, called
a primitive of ψ, such that, for any two points x and x
of X,
ψ(x, x
) = μ(x
)
− μ(x).
For every point x
0
∈ X, for every constant c ∈ G
∗
/Γ, the map μ defined by
μ(x) = ψ(x
0
, x) + c.
is a primitive of ψ. Every primitive μ of ψ is of this kind, and any two primitive μ
and μ
of ψ differ only by a constant.
The 2-points moment map ψ will be said to be exact if there exists a primitive
μ, equivariant by the action of G. That is, if there exists a primitive μ such that
μ
◦ ρ(g) = Ad
Γ
∗
(g)
◦ μ,
for all g
∈ G. The primitives μ of ψ, equivariant or not, will be called the moment
Note
— By the identity
♥ of Subsection 4.1, ψ is a 1-cocycle of the G-
equivariant cohomology of X with coefficients in
G
∗
/Γ, twisted by the coadjoint
action. Two cocycles ψ and ψ
are cohomologous if and only if, there exists a
smooth equivariant map μ : X
→ G
∗
/Γ, such that ψ
(x, x
) = ψ(x, x
) + Δμ(x, x
)
where Δμ(x, x
) = μ(x
)
−μ(x), Δμ is a coboundary. So, the 2-points moment map
ψ defines a class belonging to H
1
G
(X,
G
∗
/Γ) which depends only on the form ω and
the action ρ of G on X. If the moment map ψ is exact, that is if class(ψ) = 0,
we shall say that the action ρ of G on X is exact, with respect to ω. In this case,
there exists a point x
0
of X and a constant c such that μ : x
→ ψ(x
0
, x) + c is an
equivariant primitive for ψ.
Proof.
Let x
0
be a chosen point of X. Since X is connected, for any x
∈ X
there exists always a path p
∈ X such that p(0) = x
0
and p(1) = x. Thus, defining
μ(x) = ψ(x
0
, x) = class(Ψ(p)), and thanks to the cocycle properties of ψ, we have
ψ(x, x
) = ψ(x, x
0
) + ψ(x
0
, x
) = ψ(x
0
, x
)
− ψ(x
0
, x) = μ(x
)
− μ(x). Now, since ψ
1
These maps should have been called the 1-point moment maps. But to conform with the
usual denomination we chose to call them simply moment maps.
25
26
PATRICK IGLESIAS-ZEMMOUR
is smooth, μ is smooth. Therefore, the equation ψ(x
, x) = μ(x
)
− μ(x) has always
a solution in μ.
Now, let μ and μ
be two primitives of ψ. For each pair x, x
of points of X we
have μ
(x
)
− μ
(x) = μ(x
)
− μ(x). That is, μ
(x
)
− μ(x
) = μ
(x)
− μ(x). So, the
map x
→ μ
(x)
−μ(x) is constant. There exists c ∈ G
∗
/Γ such that μ
(x)
−μ(x) = c,
that is μ
(x) = μ(x) + c.
Since, the maps x
→ ψ(x
0
, x), where x
0
is a fixed point of X, is a special solution
of the equation in μ, ψ(x
, x) = μ(x
)
−μ(x), any solution writes μ(x) = ψ(x
0
, x) +c
for some point x
0
∈ X and some constant c ∈ G
∗
/Γ.
5.2. Souriau’s cocycles. Let X be a connected diffeological space and ω be
a closed 2-form defined on X. Let G be a diffeological group and ρ be a smooth
action of G on X, preserving ω. Let ψ be the 2-points moment map defined in
Subsection 4.1 and let μ be a primitive of ψ as defined in Subsection 5.1. So there
exists a map θ
∈ C
∞
(G,
G
∗
/Γ) such that
μ(ρ(g)(x)) = Ad
Γ
∗
(g)(μ(x)) + θ(g).
The map θ is a (
G
∗
/Γ)-cocycle, as defined in Subsection 2.10. For all g, g
∈ G,
θ(gg
) = Ad
Γ
∗
(g)(θ(g
)) + θ(g).
We shall call the cocycle θ, Souriau’s cocycle of the moment μ.
(1) Two Souriau’s cocycles θ and θ
, associated to two moment maps μ and
μ
are cohomologous. That is, they differ by a coboundary
Δc : g
→ Ad
Γ
∗
(g)(c)
− c, where c ∈ G
∗
/Γ.
(2) For the affine coadjoint action of G on
G
∗
/Γ defined by θ, see Subsection
2.10, the moment map μ is equivariant. For all g
∈ G,
μ
◦ ρ(g) = Ad
Γ,θ
∗
(g)
◦ μ.
(3) For every cocycle θ, associated to some moment μ, there exists always a
point x
0
∈ X and a constant c ∈ G
∗
/Γ such that, for all g in G
θ(g) = ψ(x
0
, ρ(g)(x
0
)) + Δc(g).
(4) The cohomology class σ of θ belongs to a cohomology group denoted by
H
1
(G,
G
∗
/Γ). And, it depends only on the cohomology class of the 2-points
moment map ψ. This class σ will be called Souriau’s cohomology class.
Note 1
— Let x
0
by some point of X. The 2-moment map (1-cocycle) ψ defines
a 1-cocycle f from G to
G
∗
/Γ by f (g, g
) = ψ(ρ(g)(x
0
), ρ(g
)(x
0
)). The cocycle f
associated to another point x
0
will differ just by a coboundary. So, Souriau’s cocycle
σ represents just the class of this pullback f = ˆ
x
∗
0
(ψ) by the orbit map ˆ
x
0
, where
ˆ
x
∗
0
: H
1
ρ
(X,
G
∗
/Γ)
→ H
1
(G,
G
∗
/Γ). And, by the way, depends only of the restriction
of ω on any one orbit of G on X. So, a good choice of the point x
0
can simplify
sometimes the computation of σ.
Note 2
— The nature of the action ρ has strong consequences on Souriau’s
class. For example, thanks to the third item, if the group G has a fixed point x
0
,
that is ρ(g)(x
0
) = x
0
for all g in G, then Souriau’s class vanishes. So, the cocycle
ψ is exact, and there exists an equivariant primitive μ of ψ.
5. THE MOMENT MAPS
27
Proof.
Thanks to Subsection 5.1, every moment map μ writes μ(x) = ψ(x
0
, x)
+c, where x
0
is some fixed point of X and c
∈ G
∗
/Γ. So, μ(ρ(g)(x))
−Ad
Γ
∗
(g)(μ(x)) =
ψ(x
0
, ρ(g)(x)) + c
− Ad
Γ
∗
(g)(ψ(x
0
, x) + c) = ψ(x
0
, ρ(g)(x)) + c
− Ad
Γ
∗
(g)(ψ(x
0
, x))
−
Ad
Γ
∗
(g)(c) = ψ(x
0
, ρ(g)(x))
− ψ(ρ(g)(x
0
), ρ(g)(x))
− Δc(g) = ψ(x
0
, ρ(g)(x)) +
ψ(ρ(g)(x), ρ(g)(x
0
))
− Δc(g) = ψ(x
0
, ρ(g)(x
0
))
− Δc(g). Therefore, μ(ρ(g)(x)) −
Ad
Γ
∗
(g)(μ(x)) is constant with respect to x. That proves the points 1) and 4).
Now, the variance of θ with respect to the multiplication of G is a classical result of
cohomology (see for example [Kir74]). It is then obvious that two moment maps
μ and μ
differing just by a constant, the associated cocycles θ and θ
differ by a
coboundary. The remaining items are just the results of elementary, or well known,
algebraic computations.

CHAPTER 6
The moment maps for exact 2-forms
The special case where the closed 2-form is the exterior differential of an in-
variant 1-form deserves a special care, since it justifies the constructions above, by
analogy with the moment maps of classical symplectic geometry.
6.1. The exact case. Let X be a connected diffeological space and let ω be
a closed 2-form defined on X. Let G be a diffeological group and ρ be a smooth
action of G on X, preserving ω. Let us assume that ω = dα and that α is also
invariant under the action of G, that is ρ(g)
∗
(α) = α for all g in G. Let Ψ be the
paths moment map defined in Subsection 3.1, and ψ be the 2-points moment map
defined in Subsection 4.1. So, for every p
∈ Paths(X)
Ψ(p) = ψ(x, x
) = ˆ
x
∗
1
(α)
− ˆx
∗
0
(α),
where x
1
= p(1) and x
0
= x
0
. Moreover, the 2-points moment map ψ is exact, and
every equivariant moment map is cohomologous to
μ : x
→ ˆx
∗
(α).
The action of G is hamiltonian, Γ =
{0} and exact σ = 0, see Subsection 3.7 and
Subsection 5.2. So, this shows in particular the coherence of the general construc-
tions developed until now.
Proof.
By definition of the paths moment map, Ψ(p) = ˆ
p
∗
(Kω). So, Ψ(p) =
ˆ
p
∗
(K(dα)). But, K(dα) + d(Kα) = ˆ
1
∗
(α)
− ˆ0
∗
(α), thus K(dα) = ˆ
p
∗
[ˆ
1
∗
(α)
− ˆ0
∗
(α)
−
d(Kα)]. And, Ψ(p) = (ˆ
1
◦ ˆp)
∗
(α)
− (ˆ0 ◦ ˆp)
∗
(α)
− d[ˆp
∗
(K(α))]. But, ˆ
1
◦ ˆp = ˆx
1
, and
ˆ
0
◦ ˆp = ˆx
0
. So Ψ(p) = ˆ
x
∗
1
(α)
− ˆx
∗
0
(α)
− d[ˆp
∗
(Kα)]. Now, Kα is the real function
Kα : p
→
p
α.
Since ˆ
p
∗
(Kα) = Kα
◦ ˆp, we have for all g ∈ G,
Kα(ˆ
p(g)) =
ρ(g)
◦p
α =
p
ρ(g)
∗
(α) =
p
α.
So, the function ˆ
p
∗
(Kα) : G
→ R is constant and equal to
p
α. So, d[ˆ
p
∗
(Kα)] = 0,
and Ψ(p) = ˆ
x
∗
1
(α)
− ˆx
∗
0
(α). Thus, Ψ(p) = ψ(x
0
, x
1
) and Γ =
{0}.
Now, the function μ : x
→ ˆx
∗
(α) is clearly a primitive of ψ. That is, ψ(x
0
, x
1
) =
μ(x
1
)
− μ(x
0
). But R(ρ(g)(x)) = ˆ
x
◦ R(g), where R(ρ(g)(x)) denotes the orbit
map of ρ(g)(x), with g
∈ G. So, μ(ρ(g)(x)) = (ˆx ◦ R(g))
∗
(α) = R(g)
∗
(ˆ
x
∗
(α)) =
R(g)
∗
(μ(x)) = Ad
∗
(g)(μ(x)).
Thus, μ is an equivariant primitive of ψ.
And,
Souriau’s class σ vanishes.
29

CHAPTER 7
Functoriality of the moment maps
We inspect now, the behavior of the moment maps and the various associated
objects under natural transformations.
7.1. Images of the moment maps by morphisms. Let X be a connected
diffeological space and ω be a closed 2-form defined on X. Let G be a diffeological
group and ρ be a smooth action of G on X, preserving ω. Let G
be another
diffeological group, and let h : G
→ G be a smooth homomorphism. Let ρ
= ρ
◦ h
be the induced action of G
on X. Let us remind that the pullback h
∗
:
G
∗
→ G
∗
is
a linear smooth map.
(1) Let Ψ : Paths(X)
→ G, and Ψ
: Paths(X)
→ G
be the paths moment
map with respect to the actions of G and G
on X. So, Ψ
= h
∗
◦ Ψ.
(2) Let Γ and Γ
be the holonomy groups with respect to the actions of G and
G
on X. So, Γ
= h
∗
(Γ).
(3) The linear map h
∗
projects on a smooth homomorphism h
∗
Γ
:
G/Γ →
G
∗
/Γ
, such that the following diagram commutes.
G
∗
/Γ
G
∗
/Γ
-
h
∗
Γ
G
∗
G
∗
-
h
∗
?
pr
?
pr
(4) Let ψ and ψ
be the 2-points moment maps with respect to the actions of
G and G
. So, ψ
= h
∗
Γ
◦ ψ.
(5) Let μ be a moment map relative to the action ρ of G. So μ
= h
∗
Γ
◦ μ is a
moment map relative to the action ρ
of G
.
(6) Let μ be a moment map relative to the action ρ of G, and let μ
= μ
◦ h
∗
Γ
be the associated moment map relative to the action ρ
of G
. So, the
associated Souriau’s cocycles satisfy θ
= h
∗
Γ
◦ θ ◦ h, summarized by the
following commutative diagram.
G
∗
/Γ
G
∗
/Γ
-
h
∗
Γ
G
G
h
?
θ
?
θ
Said differently, if θ is Souriau’s cocycle associated to a moment μ of the
action ρ of G, and μ
is a moment of the action ρ
of G
, so θ
and h
∗
Γ
◦θ ◦h
are cohomologous.
Note
— Thanks to the identification between the space of momenta of a
diffeological group and any of its extensions by a discrete group, stated in Subsection
31
32
PATRICK IGLESIAS-ZEMMOUR
2.7, the moment maps of the action of a group or the moment map of the restriction
of this action to its identity component coincide. Said differently, the moment maps
doesn’t say anything about actions of discrete groups.
Proof.
To avoid confusion, let us denote by R(p) and R
(p) the orbit maps of
G and G
of p
∈ Paths(X). That is, R(p)(g) = ρ(g) ◦ p and R
(p)(g) = ρ
(g)
◦ p. So,
we have, R
(p)(g) = ρ
(g)
◦ p = ρ(h(g)) ◦ p = (R(p) ◦ h)(g)). Thus, R
(p) = R(p)
◦ h.
1. By definition of the paths moment map, we have Ψ
(p) = R
(p)
∗
(Kω) =
(R(p)
◦ h)
∗
(Kω) = h
∗
(R(p)
∗
(Kω)) = h
∗
(Ψ(p)). Thus, Ψ
= h
∗
◦ Ψ.
2. Since Γ
= Ψ
(Loops(X)), and thanks to item 1, we have Γ
= h
∗
(Γ).
3. The map h
∗
Γ
is defined by class
Γ
(α)
→ class
Γ
(h
∗
(α)), for all α
∈ G
∗
. If
β = α + γ, with γ
∈ Γ, then h
∗
(β) = h
∗
(α) + γ
, with γ
= h
∗
(γ)
∈ Γ
(item 2). So,
class
Γ
(h
∗
(β)) = class
Γ
(h
∗
(α)). And, h
∗
Γ
is well defined. Thanks to the linearity
of h
∗
, h
∗
Γ
is clearly an homomorphism. And, for
G
∗
/Γ and
G
∗
/Γ
equipped with the
quotient diffeologies, h
∗
Γ
is naturally smooth.
4. With to the notations above, ψ and ψ
are defined by, pr
◦ Ψ = ψ ◦ ends and
pr
◦ Ψ
= ψ
◦ ends, where ends(p) = ˆ0 × ˆ1(p) = (p(0), p(1)), with p ∈ Paths(X).
So, by item 1 and 3, we have pr
◦h
∗
◦Ψ = h
∗
Γ
◦ψ◦pr. That is, pr
◦Ψ
= (h
∗
Γ
◦ψ)◦pr.
So, h
∗
Γ
◦ ψ = ψ
.
5. Let μ
= h
∗
Γ
◦ μ, and let x, y ∈ X. So, μ
(y)
− μ
(x) = h
∗
Γ
◦ μ(y) − h
∗
Γ
◦ μ(y) =
h
∗
Γ
(μ(y)
− μ(x)) = h
∗
Γ
◦ ψ(y, x) = ψ
(y, x). So, μ
is a moment map for the action
ρ
of G.
6. According to Subsection 5.2, there exists a point x
0
∈ X such that, for
all g
∈ G
, θ
(g
) = ψ
(x
0
, ρ
(g
)(x
0
)). So, thanks to the previous items we have,
θ
(g
) = (h
∗
Γ
◦ψ)(x
0
, ρ(h(g
))(x
0
)) = h
∗
Γ
(ψ(x
0
, ρ(h(g
))(x
0
))) = h
∗
Γ
(θ(h(g
))) = (h
∗
Γ
◦
θ
◦ h)(g
). Thus, we get θ
= h
∗
Γ
◦ θ ◦ h
7.2. Pushing forward moment maps. Let X and X
be two connected
diffeological spaces. Let ω and ω
be two closed 2-forms defined respectively on
X and X
. Let G be a diffeological group, let ρ be a smooth action of G on X,
preserving ω, and let ρ
be a smooth action of the same group G on X
, preserving
ω
. Let f : X
→ X
be a smooth map such that ω = f
∗
(ω
), and f
◦ ρ(g) = ρ
(g)
◦ f,
for all g
∈ G.
(1) Let f
∗
: Paths(X)
→ Paths(X
) defined by f
∗
(p) = f
◦ p. So, the paths
moment maps Ψ and Ψ
relative to the action ρ and ρ
are related by
Ψ = Ψ
◦ f
∗
,
and the associated holonomy groups Γ and Γ
satisfy
Γ =
{Ψ
(f
◦ ) | ∈ Loops(X)} ⊂ Γ
.
(2) Let φ :
G
∗
/Γ
→ G
∗
/Γ
be the projection induced by the inclusion Γ
⊂ Γ
.
Let ψ and ψ
be the 2-points moment maps relative to the actions ρ and
ρ
. So, for all pairs of points x
1
, x
2
of X,
ψ
(f (x
1
), f (x
2
)) = φ(ψ(x
1
, x
2
)).
(3) For every moment map μ relative to the action ρ, there exists a moment
map μ
relative to the action ρ
, such that
μ
◦ f = φ ◦ μ.
7. FUNCTORIALITY OF THE MOMENT MAPS
33
(4) Let θ and θ
be two Souriau’s cocycles relative to the actions ρ and ρ
.
So, the map φ
◦ θ is a Souriau cocycle, cohomologous to θ
. Thus, the
two Souriau’s classes σ and σ
satisfy σ
= φ
∗
(σ). Where φ
∗
denotes the
action of φ on cohomology, φ
∗
(class(θ)) = class(φ
◦ θ).
Proof.
1. By definition Ψ(p) = ˆ
p
∗
(Kω), that is Ψ(p) = ˆ
p
∗
(K(f
∗
(ω
))). And
thanks to the variance of the chain-homotopy operator K
◦ f
∗
= (f
∗
)
∗
◦ K
, see
Subsection 1.7, we have Ψ(p) = ˆ
p
∗
◦ (f
∗
)
∗
(K
ω
) = (f
∗
◦ ˆp)
∗
(K
ω
). But, for all
g
∈ G, f
∗
◦ ˆp(g) = f ◦ ρ(g) ◦ p = ρ
(g)
◦ f ◦ p = ˆp
(g), where p
= f
◦ p. So,
Ψ(p) = ˆ
p
∗
(K
ω
) = Ψ
(p
) = Ψ
(f
∗
(p)). Therefore, Ψ = Ψ
◦ f
∗
. Now, by defi-
nition of the holonomy groups, Γ = Ψ(Loops(X)) = Ψ
(f
∗
(Loops(X))), and since
f
∗
(Loops(X))
⊂ Loops(X
), we get Γ
⊂ Γ
.
2. Since Γ
⊂ Γ
, the map φ : class
Γ
(α)
→ class
Γ
(α), from
G
∗
/Γ
→ G
∗
/Γ
,
is well defined. Now, let x
1
= f (x
1
) and x
2
= f (x
2
), there exists p
∈ Paths(X)
connecting x
1
to x
2
. So the path f
∗
(p) connects x
1
to x
2
. Thus, by definition
of ψ
, ψ
(x
1
, x
2
) = class
Γ
(Ψ
(p
)) = class
Γ
(Ψ
◦ f
∗
(p)), and thanks to the first
item, class
Γ
(Ψ
(p
)) = class
Γ
(Ψ(p)) = φ(class
Γ
(Ψ(p))). But class
Γ
(Ψ(p)) =
ψ(x
1
, x
2
). So, ψ
(x
1
, x
2
) = φ(ψ(x
1
, x
2
)), that is ψ
(f (x
1
), f (x
2
)) = ψ(x
1
, x
2
).
3. According to Subsection 5.1, for every moment map μ there exists a point
x
0
∈ X and a constant c ∈ G
∗
/Γ such that μ(x) = ψ(x
0
, x) + c . Let us define μ
by
μ
(x
) = ψ
(x
0
, x
) + c
, where x
0
= f (x
0
) and c
= φ(c). So, thanks to the item 2,
ψ
(f (x
0
), f (x)) = φ(ψ(x
0
, x)), so μ
(f (x)) = φ(ψ(x
0
, x)) + φ(c) = φ(ψ(x
0
, x) + c) =
φ(μ(x)). Thus, μ
satisfies μ
◦ f = φ ◦ μ.
4. Let θ be a Souriau cocycle for the action ρ. According to Subsection 5.2,
θ is cohomologous to ϑ : g
→ ψ(x
0
, ρ(g)(x)), where x
0
is some point of X. So, let
x
0
= f (x
0
), and ϑ
: g
→ ψ
(x
0
, ρ
(g)(x
0
)). Thus, ϑ
(g) = ψ
(f (x
0
), ρ
(g)(f (x
0
))) =
ψ
(f (x
0
), f (ρ(g)(x
0
))) = φ(ψ(x
0
, ρ(g)(x
0
))) = φ
◦ ϑ(g). Now since all Souriau’s
cocycles, with respect to a given action of G, are cohomologous, the cocycle θ
is
cohomologous to ϑ
, and then cohomologous to φ
◦ ϑ, and thus to φ ◦ θ. Therefore,
σ
= class(θ
) = class(φ
◦ θ) = φ
∗
(class(θ)) = φ
∗
(σ).

CHAPTER 8
The universal moment maps
The theory of moment maps developed in the previous paragraph applies in
particular to the whole group of automorphisms Diff(X, ω) of a closed 2-form ω
defined on a diffeological space X. We will describe, in this paragraph, the relation-
ships between the « universal » moment maps and associated objects obtained by
considering the whole group Diff(X, ω) and the equivalent objects associated to a
smooth action of some other group G on X, preserving ω.
8.1. Universal moment maps. Let X be a connected diffeological space and
let ω be a closed 2-form defined on X. Let us remind that the group Diff(X, ω) of
all the automorphisms of (X, ω) is equipped with the functional diffeology of group
of diffeomorphisms. Let us denote also this group by G
ω
. Every constructions
defined above, the moment space, the paths moment map, the holonomy group,
the 2-points moment map, the moment maps, Souriau’s cocycle and Souriau’s class,
apply for G
ω
. We shall distinguish these objects by the index ω. So, we denote by
G
∗
ω
the momenta space of G
ω
, by Ψ
ω
: Paths(X)
→ G
∗
ω
the paths moment map, by
Γ
ω
= Ψ
ω
(Loops(X)) the holonomy group, by ψ
ω
the 2-points moment map, by μ
ω
the moment maps, by θ
ω
Souriau’s cocycles, and by σ
ω
Souriau’s class. Since G
ω
and its action on X are uniquely defined by ω, these objects depend only on the
2-form ω.
Now, let G be a diffeological group and ρ be a smooth action of G on X,
preserving ω. That is, a smooth homomorphism ρ from G to G
ω
. The values of
the various objects Ψ, Γ, ψ, μ, θ, with respect to the action ρ of G on X, depend
only on ρ
∗
, Ψ
ω
, Γ
ω
, ψ
ω
, μ
ω
, and θ
ω
, as described in Subsection 7.1. And, we have:
⎧
⎨
⎩
Ψ
=
ρ
∗
◦ Ψ
ω
Γ
=
ρ
∗
(Γ
ω
)
ψ
=
ρ
∗
Γ
ω
◦ ψ
ω
&
μ
ρ
∗
Γ
ω
◦ μ
ω
θ
ρ
∗
Γ
ω
◦ θ
ω
◦ ρ.
In this sense the objects G
ω
, Γ
ω
, Ψ
ω
, Γ
ω
, ψ
ω
, μ
ω
, θ
ω
and σ
ω
are universal. So,
we shall call Ψ
ω
the universal paths moment map, Γ
ω
the universal holonomy, ψ
ω
the universal 2-points moment map, μ
ω
the universal moment maps, θ
ω
universal
Souriau’s cocycles, and σ
ω
universal Souriau’s class of ω.
Note that in particular, this gives us a notion of hamiltonian spaces, those for
which, for one reason or another, the universal holonomy is trivial Γ
ω
=
{0}.
8.2. The group of hamiltonian diffeomorphisms. Let X be a connected
diffeological space equipped with a closed 2-form ω. There exists a largest con-
nected subgroup Ham(X, ω)
⊂ Diff(X, ω) whose action is hamiltonian, that is
whose holonomy vanishes. The elements of Ham(X, ω) are called hamiltonian dif-
feomorphisms. An action ρ of a diffeological group G on X is hamiltonian if and
only if, restricted to the identity component of G, ρ takes its values in Ham(X, ω).
35
36
PATRICK IGLESIAS-ZEMMOUR
The construction of Ham(X, ω) is actually given as follows. Let us denote by G
ω
the group Diff(X, ω) and by G
◦
ω
its identity component. Let π :
G
◦
ω
→ G
◦
ω
be the
universal covering. Since the universal holonomy Γ
ω
is made up of closed momenta,
according to Subsection 2.11 every γ
∈ Γ
ω
defines a unique homomorphism k(γ)
from
G
◦
ω
to R such that π
∗
(γ) = d[k(γ)]. Let
H
ω
=
γ
∈Γ
ω
ker(k(γ)),
and let
H
◦
ω
be its identity component. So,
Ham(X, ω) = π(
H
◦
ω
).
Note 1
— The map f :
G
◦
ω
→ Hom(π
1
(X), R) defined by f(˜
g) = [τ
→ k(γ)(˜g)],
with τ = class() and γ = Ψ(), is an homomorphism. And,
H
ω
= ker(f). In
classical symplectic geometry, the image F = val(f) is called, by some authors, the
group of flux of ω.
Note 2
— Since to be hamiltonian for a group of automorphisms depends only
on its connected component, see Subsection 2.7 and Subsection 2.8, any extension
H
⊂ Diff(X, ω) of Ham(X, ω), such that H/Ham(X, ω) is discrete
, is hamiltonian.
In particular π(
H
ω
) is hamiltonian, or if Γ
ω
=
{0} then Diff(X, ω) is hamiltonian,
and Ham(X, ω) is the identity component of Diff(X, ω).
Note 3
— Let us choose a point x
0
in X and let μ be the moment map with
respect to the group Ham(X, ω), defined by μ(x
0
) = 0. Let f be a 1-parameter
subgroup of Ham(X, ω). Applying the note of Subsection 3.2, we get for all x
∈ X
the expression of μ(x), evaluated on f
μ(x)(f ) = h
f
(x)
× dt with h
f
(x) =
−
x
x
0
i
f
(ω).
The smooth function h
f
: X
→ R is the hamiltonian (vanishing at x
0
) of the
1-parameter subgroup f .
Proof.
Let us remark, first of all, that for every γ
∈ Γ
ω
, π
∗
(γ)
H
ω
= 0.
Indeed, π
∗
(γ)
H
ω
= d[k(γ)]
H
ω
= d[k(γ)
H
ω
]. But, by the very definition of
H
ω
, k(γ)
H
ω
= 0, so π
∗
(γ)
H
ω
= 0.
a) Let us prove that the holonomy of Ham(X, ω) is trivial. Let H
ω
= π(
H
ω
)
and let us denote by j
H
ω
the inclusion H
ω
⊂ G
ω
, by j
H
ω
the inclusion
H
ω
⊂
G
◦
ω
,
and by π
H
ω
:
H
ω
→ H
ω
the projection. So, j
H
ω
◦ π
H
ω
= π
◦ j
H
ω
. Let Γ
H
ω
be the
holonomy of H
ω
, so according to Subsection 7.1, Γ
H
ω
= j
∗
H
ω
(Γ
ω
). Thus, for every
¯
γ
∈ Γ
H
ω
there exists γ
∈ Γ
ω
such that ¯
γ = γ
H
ω
= j
∗
H
ω
(γ). So, for all ¯
γ
∈ Γ
H
ω
,
π
∗
H
ω
(¯
γ) = π
∗
H
ω
(j
∗
H
ω
(γ)) = (j
H
ω
◦ π
H
ω
)
∗
(γ) = (π
◦ j
H
ω
)
∗
(γ) = j
∗
H
ω
(π
∗
(γ)) = π
∗
(γ)
H
ω
. But, π
∗
(γ)
H
ω
= 0, so π
∗
H
ω
(¯
γ) = 0. And since π
H
ω
is a subduction, ¯
γ = 0.
Therefore, the holonomy of H
ω
vanishes, Γ
H
ω
=
{0}.
b) Let us prove now that every connected subgroup H
⊂ G
ω
whose action is
hamiltonian is a subgroup of Ham(X, ω). Let
H = π
−1
(H) and
H
◦
be its identity
component. Let j
H
be the inclusion H
⊂ G
ω
, and j
H
◦
be the inclusion
H
◦
⊂
G
◦
ω
.
Let π
H
= π
H
◦
. So, j
H
◦ π
H
= π
◦ j
H
◦
. Let Γ
H
be the holonomy of H. Since
1
Where H and Ham(X, ω) are equipped with the subset diffeology of the functional diffeology
of Diff(X, ω).
8. THE UNIVERSAL MOMENT MAPS
37
Γ
H
= j
∗
H
(Γ
ω
) and Γ
H
=
{0}, for all γ ∈ Γ
ω
, j
∗
H
(γ) = 0. Thus, for all γ
∈ Γ
ω
,
π
∗
H
(j
∗
H
(γ)) = 0. But, π
∗
H
(j
∗
H
(γ)) = (j
H
◦ π
H
)
∗
(γ) = (π
◦ j
H
◦
)
∗
(γ) = j
∗
H
◦
(π
∗
(γ)) =
π
∗
(γ)
H
◦
. So, for all γ
∈ Γ
ω
, π
∗
(γ)
H
◦
= 0. But π
∗
(γ) = d[k(γ)], hence
d[k(γ)
H
◦
] = 0. So, since H
◦
is connected, k(γ) is constant on
H
◦
, and since k(γ)
is an homomorphism to R, this constant is necessarily 0. Thus,
H
◦
⊂ ker(k(γ)),
for all γ
∈ Γ
ω
, that is
H
◦
⊂
H
ω
. But, since H
◦
is connected
H
◦
⊂
H
◦
ω
⊂ H
ω
and
thus H = π(
H
◦
)
⊂ Ham(X, ω) = π(
H
◦
ω
).
8.3. Time-dependent hamiltonian. Let X be a connected diffeological
space and ω be a closed 2-form defined on X. A diffeomorphism f of X belongs to
Ham(X, ω) if and only if:
(1) There exists a smooth path t
→ f
t
in Diff(X, ω) connecting the identity
1
M
= f
0
to f = f
1
.
(2) There exists a smooth path t
→ Φ
t
in C
∞
(X, R) such that for all t,
i
F
t
(ω) =
−dΦ
t
with
F
t
: s
→ f
−1
t
◦ f
t+s
.
According to the tradition of classical symplectic geometry, the path t
→ Φ
t
can
be called a time-dependent hamiltonian of the 1-parameter family of hamiltonian
diffeomorphisms t
→ f
t
.
Proof.
Let us assume first that f satisfies the condition above. That is, there
exists a smooth path t
→ f
t
in Diff(X, ω) such that f
0
= 1
M
, f
1
= f , and there
exists a smooth path t
→ Φ
t
in C
∞
(X, R) such that i
F
t
(ω) =
−dΦ
t
for all t where
F
t
: s
→ f
−1
t
◦ f
t+s
. Let us remind that Ham(X, ω) = π(
H
◦
ω
), with
H
◦
ω
the identity
component of
H
ω
=
∩
γ
∈Γ
ω
ker(k(γ)), and let ˜
f
∈ G
◦
ω
be the homotopy class of the
path t
→ f
t
, notations of Subsection 8.2. So, let γ
∈ Γ
ω
, that is γ = Ψ
ω
() where
is some loop in M. By definition, we have
k(γ)( ˜
f ) =
[t
→f
t
]
γ =
[t
→f
t
]
Ψ
ω
() =
1
0
Ψ
ω
()([t
→ f
t
])
t
(1)dt
Now, thanks to Subsection 3.2
♣, we have
Ψ
ω
()([t
→ f
t
])
t
(1) =
−
i
F
t
(ω) =
dΦ
t
=
∂
Φ
t
= 0.
So, k(γ)( ˜
f ) = 0 for all γ
∈ Γ
ω
and ˜
f belongs to
H
ω
and more precisely in the
identity component of
H
ω
. Therefore f
∈ Ham(X, ω).
Conversely, let f
∈ Ham(M, ω). Since Ham(M, ω) is connected there exists
a path t
→ f
t
in Ham(M, ω) connecting 1
M
to f .
And, since the projection
π
H
◦
ω
:
H
◦
ω
→ Ham(M, ω) is a covering, there exists a (unique) lifting t → ˜
f
t
of
t
→ f in
H
◦
ω
, along π
H
◦
ω
, such that ˜
f
0
= 1
H
ω
. This lifting is actually given by
˜
f
t
= class(p
t
), with p
t
: s
→ f
st
. So, for all t, ˜
f
t
∈
H
◦
ω
⊂
H
ω
=
∩
γ
∈Γ
ω
ker(k(γ)).
That is, for all γ
∈ Γ
ω
, k(γ)( ˜
f
t
) = 0, or in other words, for all
∈ Loops(M),
38
PATRICK IGLESIAS-ZEMMOUR
k(Ψ
ω
())( ˜
f
t
) = 0. But,
k(Ψ
ω
())( ˜
f
t
)
=
p
t
Ψ
ω
()
=
1
0
Ψ
ω
()(s
→ f
st
)
s
(1)ds
=
1
0
Ψ
ω
()(s
→ st → f
st
)
s
(1)ds
=
1
0
[Ψ
ω
()(u
→ f
u
)]
u=st
dst
ds
ds
=
t
0
Ψ
ω
()(u
→ f
u
)
u
(1)du.
So,
k(Ψ
ω
())( ˜
f
t
) = 0
⇒
1
t
t
0
Ψ
ω
()(u
→ f
u
)
u
(1)du = 0,
and taking the limit for t
→ 0 we get,
k(Ψ
ω
())( ˜
f
t
) = 0
⇒ Ψ
ω
()(t
→ f
t
)
t
(1) = 0.
But, Ψ
ω
()([t
→ f
t
])
t
(1) =
−
i
F
t
(ω), see Subsection 3.2
♣. So, for all t and all
∈ Loops(X)
i
F
t
(ω) = 0.
But F
t
is a path in Diff(X, ω) centered at the identity, so the Lie derivative of ω
by F
t
vanishes, and applying the Cartan formula given in Subsection 1.6, we get
£
F
t
ω = 0
⇒ d[i
F
t
(ω)] + i
F
t
(dω) = d[i
F
t
(ω)] = 0.
So, the 1-form i
F
t
(ω) is closed and its integral on any loop of X vanishes, therefore
i
F
t
(ω) is exact [Piz05].
Thus, for all real t there exists a real function Φ
t
∈
C
∞
(X, R) such that i
F
t
(ω) =
−dΦ
t
. The fact that t
→ Φ
t
is a smooth map
from R to C
∞
(X, R), for the functional diffeology, is a consequence of the explicit
construction of the function Φ
t
by integration along the paths, see [Piz05].
CHAPTER 9
About symplectic manifolds
The case of symplectic manifolds (M, ω) deserves a special care: any universal
moment map μ
ω
is injective and therefore identifies M with a coadjoint orbit — in
the general sense given in Subsection 2.10 — of Diff(M, ω).
9.1. Value of the moment maps for manifolds. Let M be a connected
manifold equipped with a closed 2-form ω. In this context, the paths moment map
Ψ
ω
takes a special expression. Let p be a path in M, let F : U
→ Diff(M, ω) be a
n-plot, we have
(
♦)
Ψ
ω
(p)(F)
r
(δr) =
1
0
ω
p(t)
( ˙
p(t), δp(t)) dt
for all r
∈ U and δr ∈ R
n
, where δp is the lifting in the tangent space TM of the
path p, defined by
(
♥)
δp(t) = [D(F(r))(p(t))]
−1
∂F(r)(p(t))
∂r
(δr).
Proof.
By definition, Ψ(p)(F) = ˆ
p
∗
(Kω)(F) = Kω(ˆ
p
◦ F). The explicit expres-
sion of the operator K given in Subsection 1.7, applied to the plot ˆ
p
◦F : r → F(r)◦p
of Paths(X), gives
(Kω)(ˆ
p
◦ F)
r
(δr) =
1
0
ω
s
u
→ (ˆp ◦ F)(u)(s + t)
(
s=0
u=r
)
1
0
0
δr
dt.
But (ˆ
p
◦ F)(u)(s + t) = F(u)(p(s + t)), let us denote temporarily by Φ
t
the plot
(s, u)
→ F(u)(p(s + t)), so F(u)(p(s + t)) writes Φ
t
(s, u). Now, let us denote by
I
the integrand of the right term of this expression. We have,
I = ω
s
u
→ Φ
t
(s, u)
(
s=0
u=r
)
1
0
0
δr
=
Φ
∗
t
(ω)(
0
r
)
1
0
0
δr
=
ω
Φ
t
(
0
r
)
D(Φ
t
)(
0
r
)
1
0
, D(Φ
t
)(
0
r
)
0
δv
=
ω
F(r)(p(t))
∂
∂s
F(r)(p(s + t))
s=0
,
∂
∂r
F(r)(p(t))
(δr)
.
But,
∂
∂s
F(r)(p(s + t))
s=0
= D(F(r))(p(t))
∂p(s + t)
∂s
s=0
= D(F(r))(p(t))( ˙p(t)).
39
40
PATRICK IGLESIAS-ZEMMOUR
So, using this last expression and the fact that F is a plot of Diff(M, ω), that is for
all r in U, F(r)
∗
ω = ω, we have
ω
s
u
→ Φ
t
(s, u)
(
s=0
u=r
)
=
ω
F(r)(p(t))
D(F(r))(p(t))( ˙p(t)),
∂F(r)(p(t))
∂r
(δr)
=
ω
p(t)
˙
p(t), [D(F(r))(p(t))]
−1
∂F(r)(p(t))
∂r
(δr)
=
ω
p(t)
( ˙
p(t), δp(t)).
Therefore, Ψ
ω
(p)(F)
r
(δr) = Kω(ˆ
p
◦ F)
r
(δr) =
1
0
ω
p(t)
( ˙
p(t), δp(t)) dt.
9.2. The paths moment maps for symplectic manifolds. Let M be a
Hausdorff manifold and ω be a non degenerate closed 2-form defined on M. Let
m
0
and m
1
be two points of M connected by a path p. Let f
∈ C
∞
(M, R) with
compact support. Let F be the exponential of the symplectic gradient
grad
ω
(f ),
F is a 1-plot of Diff(M, ω), and precisely a 1-parameter homomorphism. So, the
universal paths moment map Ψ
ω
, computed at the path p, evaluated to the 1-plot
F, is the constant 1-form of R,
Ψ
ω
(p)(F) = [f (m
1
)
− f(m
0
)]
× dt with F : t → e
t grad
ω
(f )
,
and dt the standard 1-form of R. Note that we are in the special case where F
is actually a 1-parameter homomorphism of Ham(M, ω)
⊂ Diff(M, ω), and the
function f is one hamiltonian of F.
Proof.
Let us remark that, in our case, the lift δp defined by
♥ of Subsection
9.1 writes simply
δp(t) = [D(e
rξ
)(p(t))]
−1
∂e
rξ
(p(t))
∂r
(δr) = ξ(p(t))
× δr with ξ = grad
ω
(f ),
where r and δr are reals. So, the expression
♦ of Subsection 9.1 becomes
Ψ
ω
(p)(F)
r
(δr)
=
1
0
ω
p(t)
( ˙
p(t), ξ(p(t)) dt
× δr
=
1
0
ω
p(t)
( ˙
p(t), grad
ω
(f )(p(t)) dt
× δr
=
1
0
df
dp(t)
dt
dt
× δr
=
[f (p(1))
− f(p(0))] × δr
That is, Ψ
ω
(p)(F) = [f (m
1
)
− f(m
0
)]
× dt.
9.3. Moment maps for symplectic manifolds. Let M be a connected
Hausdorff manifold and ω be a closed 2-form defined on M. The form ω is non-
degenerated, that is symplectic, if and only if
(1) The manifold M is an homogeneous space of Diff(M, ω).
(2) Any one of its universal moment maps μ
ω
: M
→ G
∗
ω
/Γ
ω
is injective.
1
Let us remind that the symplectic gradient is defined by ω(grad
ω
(f ),
·) = −df.
9. ABOUT SYMPLECTIC MANIFOLDS
41
Note that, if one of the universal moment maps μ
ω
is injective so are every ones.
Note also that, if ω is symplectic, then the image of the moment map,
O
ω
=
μ
ω
(M)
∈ G
∗
ω
/Γ
ω
, is a (Γ
ω
, θ
ω
)-coadjoint orbit of Diff(M, ω). And, μ
ω
identifies M
to
O
ω
, where
O
ω
is equipped with the quotient diffeology of Diff(M, ω). In other
words, every symplectic manifold is a coadjoint orbit.
Remark
— Let us consider the example M = R
2
and ω = (x
2
+ y
2
) dx
∧ dy.
This form is non degenerate on R
2
−{0}, but degenerates at the point (0, 0). Thus,
(0, 0) is an orbit of the group Diff(X, ω), and actually R
2
− {0} is the other orbit.
Since R
2
is contractible the holonomy Γ
ω
is trivial and the universal moment map
μ
ω
defined by μ
ω
(0, 0) = 0
G
∗
ω
is equivariant. Now, μ
ω
is injective, and ω is not
symplectic. So, the hypothesis of transitivity of Diff(M, ω) on M is not superfluous
is this proposition.
Proof.
Let us assume first that ω is nondegenerate, that is symplectic. So,
the group Diff(M, ω) is transitive on M [Boo69]. Moreover, for every m
∈ M,
the orbit map ˆ
m : ϕ
→ ϕ(m) is a subduction [Don84]. So, the image of moment
moment map μ
ω
is one orbit
O
ω
of the affine coadjoint action of G
ω
on
G
∗
ω
/Γ
ω
,
associated to the cocycle θ
ω
. Thus, for the orbit
O
ω
equipped with the quotient
diffeology of G
ω
, the moment map μ
ω
is a subduction.
Now, let m
0
and m
1
two points of M such that μ
ω
(m
0
) = μ
ω
(m
1
), that is
ψ
ω
(m
0
, m
1
) = μ
ω
(m
1
)
− μ
ω
(m
0
) = 0. Let p
∈ Paths(M) such that p(0) = m
0
and p(1) = m
1
. Thus, ψ
ω
(m
0
, m
1
) = 0 is equivalent to Ψ
ω
(p) = Ψ
ω
(), where
is some loop of M, we can choose (0) = (1) = m
0
. Now, let us assume that
m
0
= m
1
. Since M is Hausdorff there exists a smooth real function f
∈ C
∞
(M, R),
with compact support, such that f (m
0
) = 0 and f (m
1
) = 1. Let us denote by ξ the
symplectic gradient field associated to f and by F the exponential of ξ. Thanks to
Subsection 9.2, on one hand we have Ψ(p)(F) = [f (m
1
)
−f(m
0
)]dt = dt, and on the
other hand Ψ
ω
()(F) = [f (m
0
)
− f(m
0
)]dt = 0. But dt
= 0, thus ψ
ω
(m
0
, m
1
)
= 0,
and the moment map μ
ω
is injective. Therefore, μ
ω
is an injective subduction on
O
ω
, that is a diffeomorphism.
Conversely, let us assume that M is an homogeneous space of Diff(M, ω) and
μ
ω
is injective. Let us notice first that, since Diff(M, ω) is transitive, the rank of
ω is constant. In other words, dim ker ω = const. Now, let us assume that ω is
degenerated, that is dim(ker ω)
≥ 1. Since m → ker ω
m
is a smooth foliation, for
any point m of M there exists a smooth path p of M such that p(0) = m and for
t belonging to a small interval around 0
∈ R, ˙p(t) = 0 and ˙p(t) ∈ ker ω
p(t)
for all
t in this interval. So, we can re-parametrize the path p and assume now that p
is defined on the whole R and satisfies p(0) = m, p(1) = m
with m
= m
, and
˙
p(t)
∈ ker ω
p(t)
for all t. Now, since ˙
p(t)
∈ ker ω
p(t)
for all t, using the expression
♦ given in Subsection 9.1, we get Ψ
ω
(p) = 0
G
∗
ω
and thus μ
ω
(m) = μ
ω
(m
). But
m
= m
and we have assumed that μ
ω
is injective. So the kernel of ω is reduced to
{0}, ω is nondegenerate, that is symplectic.
Let us finish by proving the remark. That is, the universal moment map μ
ω
of
ω = (x
2
+ y
2
) dx
∧ dy is injective. First of all μ
ω
(0, 0) = 0
G
∗
. Now if z = (x, y) and
z
= (x
, y
) are two different points of R
2
and different from (0, 0), there is a smooth
function with compact support contained in a small ball not containing (0, 0) nor z
and such that f (z
) = 1. So the 1-parameter group generated by grad
ω
(f ) belongs
to Diff(R
2
, ω), and then a similar argument as the one of the proof above shows
that μ
ω
(z)
= μ
ω
(z
). Now it remains to prove that if z
= (0, 0), μ
ω
(z)
= 0
G
∗
. Let
42
PATRICK IGLESIAS-ZEMMOUR
us consider p(t) = tz and F(r) be the positive rotation of angle 2πr, where r
∈ R.
The application of the formula
♦ of Subsection 9.1, computed at the point r = 0
and applied to the vector δr = 1 gives (2π/3)(x
2
+ y
2
)
2
which is not zero. So, the
moment map μ
ω
is injective.
9.4. Restriction to hamiltonian diffeomorphisms. Let (M, ω) be a con-
nected Hausdorff symplectic manifold. Let Ham(M, ω) be the group of hamiltonian
diffeomorphisms, and let
H
∗
ω
be the space of its momenta. Let μ
ω
: M
→ H
∗
ω
be
any moment map associated to the action of Ham(M, ω), and let θ
ω
be the associ-
ated Souriau cocycle. So, μ
ω
is injective, and identifies M to a θ
ω
-coadjoint orbit
of Ham(M, ω) in
H
ω
.
Proof.
It is known also that the group Ham(M, ω) acts transitively on M
[Boo69]. With respect to that group, and by construction, the holonomy is trivial:
the associated paths moment map Ψ
ω
and the moment maps μ
ω
take their values in
the space
H
∗
ω
. Let j : Ham(M, ω)
→ Diff(M, ω) be the inclusion, so the universal
holonomy Γ
ω
is in the kernel of j
∗
, and we get a natural mapping j
∗
Γ
ω
:
G
∗
ω
/Γ
ω
→
H
∗
ω
. Now, the paths moment maps satisfy Ψ
ω
= j
∗
Γ
ω
◦ Ψ
ω
, and μ
ω
= j
∗
Γ
ω
◦ μ
ω
, see
Subsection 8.1. Then, since the Subsection 9.2 involves only plots of Ham(X, ω), the
first part of the proof of Subsection 9.3 applies mutatis mutandis to the hamiltonian
case and we deduce that the moment maps μ
ω
are injective and identify M with
some θ
ω
-coadjoint orbits of Ham(M, ω).
9.5. Hamiltonian diffeomorphisms of symplectic manifolds. Let (M, ω)
be a connected Hausdorff symplectic manifold. According to Banayaga, a diffeo-
morphism f is said to be hamiltonian if it can be connected to the identity 1
M
by
a smooth path t
→ f
t
in Diff(M, ω) such that
ω( ˙
f
t
,
·) = dφ
t
with
˙
f
t
(x) =
d
ds
f
s
◦ f
−1
t
(x)
s=t
,
where (t, x)
→ φ
t
(x) is a smooth real function, see [Ban78]. If, according to
this definition, f is hamiltonian then it is an element of Ham(M, ω), as defined
in Subsection 8.2. Conversely, any element f of Ham(M, ω) satisfies the condition
above. So, the definition of hamiltonian diffeomorphisms given in Subsection 8.2 is a
faithful generalization of the classical definition for symplectic manifolds. Note that
the technical requirement of compacity of the original definition op. cit. doesn’t
play any role in this characterization of hamiltonian diffeomorphisms.
Proof.
This proposition is a direct consequence of the general statement given
in Subsection 8.3 and the following comparison between the above 1-parameter
family of vector fields ˙
f
t
and the family F
t
of the Subsection 8.3.
Since f
t
◦f
−1
t
= f
t
◦(f
−1
t
◦f
t
)
◦f
−1
t
, the vector fields ˙
f
t
and F
t
are conjugated
by f
t
, precisely:
˙
f
t
= (f
t
)
∗
(F
t
)
or
˙
f
t
(x) = D(f
t
)(f
−1
t
(x))(F
t
(f
−1
t
(x))).
This implies in particular that if the vector field ˙
f
t
satisfies Banyaga’s condition
for the function φ
t
then the vector field F
t
satisfies Banyaga’s condition for the
function Φ
t
=
−φ
t
◦ f
t
, and conversely. That is:
ω( ˙
f
t
,
·) = dφ
t
⇔ ω(F
t
,
·) = −dΦ
t
with
Φ
t
=
−φ
t
◦ f
t
.

9. ABOUT SYMPLECTIC MANIFOLDS
43
Indeed, let x
∈ M, x
= f
t
(x), δx
∈ T
x
M, and δx
= D(f
t
)(x)(δx), we have:
ω
x
( ˙
f
t
(x
), δx
)
=
[dφ
t
]
x
(δx
)
ω
f
t
(x)
( ˙
f
t
(f
t
(x)), D(f
t
)(x)(δx))
=
[dφ
t
]
f
t
(x)
(D(f
t
)(x)(δx))
ω
f
t
(x)
(D(f
t
)(x)(F
t
(x)), D(f
t
)(x)(δx))
=
[f
∗
t
(dφ
t
)]
x
(δx)
[f
∗
t
(ω)]
x
(F
t
(x), δx)
=
d[f
∗
t
(φ
t
)]
x
(δx)
ω
x
(F
t
(x), δx)
=
d[φ
t
◦ f
t
]
x
(δx).
Thus, we get Φ
t
=
−φ
t
◦ f
t
.

CHAPTER 10
The homogeneous case
As it is suggested by Subsection 9.3, the case of an homogeneous action of a
diffeological group G on a space X, preserving a closed 2-form ω, deserves a special
attention.
10.1. The homogeneous case. Let X be a connected diffeological space
equipped with a closed 2-form ω. Let ρ be a smooth action of a diffeological group
G on X, preserving ω. Let us assume that X is homogeneous for this action, see
Subsection 2.3. Let Γ be the holonomy of the action ρ, let μ be a moment, and let
θ be the cocycle associated to μ. Let x
0
be any point of X, and let μ
0
= μ(x
0
).
Let St
Ad
Γ,θ
∗
(μ
0
) be the stabilizer of μ
0
for the affine coadjoint action of G on
G
∗
/Γ.
Thanks to the equivariance of the moment map μ, with respect to the affine coad-
joint action of G on
G
∗
/Γ, μ
◦ ρ(g) = Ad
Γ,θ
∗
(g)
◦ μ, the image O = μ(X) is a
(Γ, θ)-orbit of G. Let us equip
O with the quotient diffeology of G, such that
O G/St
Ad
Γ,θ
∗
(μ
0
). So, the orbit map ˆ
x
0
: G
→ X is a principal fibration with
structure group St
ρ
(x
0
), the orbit map ˆ
μ
0
: G
→ O is a principal fibration with
structure group St
Ad
Γ,θ
∗
(μ
0
), and St
ρ
(x
0
)
⊂ St
Ad
Γ,θ
∗
(μ
0
). So, the moment map
μ : X
→ O is a fibration with fiber, the homogeneous space St
Ad
Γ,θ
∗
(μ
0
)/St
ρ
(x
0
).
X
O
-
μ
G
ˆ
x
0
ˆ
μ
0
@
@
@
@@
R
X
O
-
St
Ad
Γ,θ
∗
(μ
0
)/St
ρ
(x
0
)
G
St
ρ
(x
0
)
St
Ad
Γ,θ
∗
(μ
0
)
@
@
@
@@
R
Note
— The moment maps μ are defined up to a constant, but the character-
istics of μ, that is the subspaces defined by μ(x) = const, are not. They are the
solutions of the equation ψ(x
0
, x) = 0, where const = μ(x
0
) and ψ is the 2-points
moment map.
Proof.
This is just an application of standard diffeological relations.
10.2. Symplectic homogeneous diffeological spaces. Let X be a con-
nected diffeological space and ω be a closed 2-form defined on X.
Definition.
We say that (X, ω) is an homogeneous symplectic space if it is
homogeneous under the action of Diff(X, ω) and if a universal moment map μ
ω
is
a covering onto its image.
The homogeneous situation where the moment maps μ
ω
are not coverings onto
their images can be regarded as the homogeneous pre-symplectic case.
Now, let G be some diffeological group, and let ρ be a smooth action of G
on X, preserving ω. So, if the action ρ of G on X is homogeneous, then X is
45
46
PATRICK IGLESIAS-ZEMMOUR
an homogeneous space of Diff(X, ω). And, if a moment map μ : X
→ G
∗
/Γ is a
covering onto its image, then any universal moment map μ
ω
: X
→ G
∗
ω
/Γ
ω
is a
covering onto its image.
Thus, to check that an homogeneous pair (X, ω) is symplectic it is sufficient to
find a smooth homogeneous smooth action of some diffeological group G for which
one moment map is a covering onto its image.
Proof.
To be homogeneous under the action of G means that, for some point
(and thus for any point) x
∈ X, the orbit map ˆx : G → X, defined by ˆx(g) = ρ(g)(x),
is a subduction. So, ˆ
x is surjective and, for any plot P : U
→ X, for any r
0
∈ U,
there exists a superset V of r
0
and a plot Q : V
→ G such that P V = ˆx ◦ Q.
That is, P(r) = ρ(Q(r))(x) for all r
∈ V. Since ρ is smooth, ¯Q = ρ ◦ Q is a plot
of Diff(X, ω), and P
V = ˆx ◦ ¯Q. Since, ˆx : Diff(X, ω) → X is surjective, it is a
subduction and X is an homogeneous space of Diff(X, ω).
Now, let us remark that, since the moment maps differ just by a constant,
if a moment map μ is a covering onto its image
O equipped with the quotient
diffeology of G, then every other moment map μ
= μ + const is a covering onto
its image
O
=
O + const. So, let x
0
be a point of X, and let μ(x) = ψ(x
0
, x),
where ψ is the 2-points moment map. Let μ
ω
= ψ
ω
(x
0
, x). According to Subsection
8.1, μ = ρ
∗
Γ
ω
◦ μ
ω
. Let
O = μ(X) and O
ω
= μ
ω
(X), equipped with the quotient
diffeologies of G and G
ω
= Diff(X, ω). So,
O = ρ
∗
Γ
ω
(
O
ω
). Let m
∈ O and m
ω
∈ O
ω
such that ρ
∗
Γ
ω
(m
ω
) = m. So, μ
−1
ω
(m
ω
) =
{x ∈ X | μ
ω
(x) = m
ω
} ⊂ μ
−1
(m) =
{x ∈
X
| μ(x) = ρ
∗
Γ
ω
(μ
ω
(x)) = m
}. Thus, if μ
−1
(m) is discrete, a fortiori μ
−1
ω
(m
ω
)
⊂
μ
−1
(m). Thus, if μ is a fibration onto its image, then μ
ω
is a fibration onto its
image too. And of course if μ is injective, a fortiori μ
ω
.
CHAPTER 11
Examples of moment maps in diffeology
This short list of examples shows how the theory of moment map in diffeology
can be applied to the folklore of infinite dimensional situations, but also to the less
familiar cases of singular spaces.
11.1. The moments of imprimitivity. Let X be a diffeological space. Let
us remind, and make some preliminary remarks on, the construction of the cotan-
gent bundle and the definition of the Liouville form [Piz05]. Let Ω
1
(X) denotes the
vector space of 1-form of X, equipped with the functional diffeology. The mapping
Taut, which associates to each n-plot Q
× P of the product X × Ω
1
(X) the 1-form
Taut(P
× Q) : r → P(r)(Q)
r
of dom(Q
× P), is a 1-form of X × Ω
1
(X). We call it the tautological form.
Now, let us consider the value equivalence relation. Let α and α
be two 1-
forms of X, let x be a point of X. We say that α and α
have the same value at
the point x, and we denote value(α)(x) = value(α
)(x), if and only if, for every
plot Q of X centered
at x , α(Q)
0
= α
(Q)
0
. Then, the cotangent bundle of X is
defined as the quotient X
× Ω
1
(X) by the relation value, and denoted
by T
∗
X,
T
∗
X = X
× Ω
1
(X)/value.
This notion of value, for smooth forms on numerical domains, coincides with the
ordinary definition. So, when there will be no risk of confusion
, we shall denote
simply by α(x) the value of α at the point x, that is α(x) = value(α)(x).
Let pr : X
× Ω
1
(X)
→ T
∗
X be the canonical projection. So, there exists a
1-form on T
∗
X, denoted by Liouv and called the Liouville form such that
Taut = pr
∗
(Liouv)
or
Liouv = pr
∗
(Taut),
Liouv
∈ Ω
1
(T
∗
X).
The characteristic property of the Liouville form is the following. Let α be a 1-
form of X, let ¯
α be the section of the canonical projection π : T
∗
X
→ X defined
by ¯
α : x
→ value(α)(x), so α = ¯α
∗
(Liouv). Note also that, the group Diff(X)
acts naturally on the product X
× Ω
1
(X) by ¯
ϕ(x, α) = (ϕ(x), ϕ
∗
(α)), where ϕ
is a diffeomorphism of X. So, the tautological form is invariant by this action.
Moreover, this action is compatible with the relation value, and the group Diff(X)
has a natural projected action on T
∗
X. By equivariance, the Liouville form is
invariant by this action. Note that, the moment map for the action of Diff(X) on
(T
∗
X, dLiouv) is given by the general construction of Subsection 6.1. This can be
compared to Donato’s construction for manifolds in [Don88].
1
We say that a plot Q is centered at x if and only if 0
∈ dom(Q) and Q(0) = x.
2
Note that, as well as for the notation
G
∗
of the space of momenta of a diffeological group,
the star in T
∗
X do not rely to any kind of duality a priori.
3
This notation α(x) has not to be mixed up with the notation α(Q) for the value of α in the
plot Q. But the different nature of x: a point of X, and Q: a plot of X, makes the difference.
47
48
PATRICK IGLESIAS-ZEMMOUR
Now, let us introduce the additive diffeological group of smooth functions
C
∞
(X, R), acting smoothly on X
× Ω
1
(X) by,
¯
f : (x, α)
→ (x, α + df),
for all f
∈ C
∞
(X, R). This action projects naturally on the cotangent T
∗
X into an
action, denoted by the same way,
¯
f : (x, a)
→ (x, a + df(x)),
for all (x, a)
∈ T
∗
X. So,
(1) For all f
∈ C
∞
(X, R), the variance of the tautological form and the Liou-
ville form are given by,
¯
f
∗
(Taut) = Taut + pr
∗
1
(df )
and
¯
f
∗
(Liouv) = Liouv + π
∗
(df ).
So, the exterior differentials dTaut and ω = dLiouv are invariant by the
action of C
∞
(X, R).
(2) Let p be a path of T
∗
X, connecting (x
0
, a
0
) = p(0) to (x
1
, a
1
) = p(1). So,
the paths moment map Ψ and the 2-points moment map ψ, with respect
to the 2-form ω = dLiouv, are given by
Ψ(p) = ψ((x
0
, a
0
), (x
1
, a
1
)) = d[f
→ f(x
0
)]
− d[f → f(x
1
)].
(3) For every x
∈ X, the real function [f → f(x)] is smooth. We call it the
Dirac function of the point x, and we denote it by δ
x
.
δ
x
= [f
→ f(x)] ∈ C
∞
(C
∞
(X, R), R).
The differential dδ
x
= d[f
→ f(x)] is an invariant 1-form
of the additive
group C
∞
(X, R). Every moment map of the action of C
∞
(X, R) on T
∗
X
is cohomologous to the invariant moment map
μ : (x, a)
→ −dδ
x
.
Note that, the moment μ is constant on the fibers T
∗
x
X = π
−1
(x). And, if
the real smooth functions separate
the points of X, the image of the mo-
ment map μ is the space X, identified with the space of Dirac’s functions.
(4) The action of C
∞
(X, R) on (T
∗
X, ω) is hamiltonian and exact. That is,
Γ =
{0} and σ = 0.
This example has been drawn to my attention by Fran¸cois Ziegler. This moment
appears informally in Ziegler’s construction of a symplectic analogue for « systems
of imprimitivity » in representation theory [Zie96]. It is why the moment map μ
will be called the moment of imprimitivity. The diffeological framework gives it so
a full formal status.
Proof.
First of all let us check the variance of Taut by the action of C
∞
(X, R).
Let f be a smooth real function defined on X, let Q
× P be a plot of X × Ω
1
(X).
We have ¯
f
∗
(Taut)(P
× Q)
r
= Taut( ¯
f
◦ (Q × P))
r
= (P(r) + df )(Q)
r
= P(r)(Q)
r
+
df (Q)
r
= Taut(Q
× P)
r
+ df (pr
1
◦ (Q × P))
r
= Taut(Q
× P)
r
+ pr
∗
1
(df )(Q
× P)
r
.
So, ¯
f
∗
(Taut) = Taut + pr
∗
1
(df ). Now let us check that this action is compatible
with the value relation. Let (x, α) and (x
, α
) be two elements of X
× Ω
1
(X) such
that value(α)(x) = value(α
)(x
). That is, x = x
and for every plot Q of X
4
This differential has nothing to do with the derivative of the Dirac distributions in the sense
of De Rham’s currents.
5
That is, f (x) = f (x
) for all smooth real function f if and only if x = x
.

11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
49
centered at x, α(Q)
0
= α
(Q)
0
. So, (α + df )(Q)
0
= (α
+ df )(Q)
0
and value(α +
df )(x) = value(α)(x) + value(df )(x), or (α + df )(x) = α(x) + df (x). Thus, the
action of C
∞
(X, R) projects on T
∗
X as the action ¯
f : (x, a)
→ a + df(x). Now,
since ¯
f
∗
(Taut) = Taut + pr
∗
1
(df ), clearly ¯
f
∗
(Liouv) = Liouv + π
∗
(df ). Or, in
another way, ¯
f
∗
(Liouv) = Liouv + dF(f ) with F
∈ C
∞
(C
∞
(X, R), C
∞
(T
∗
X, R))
and F(f ) = π
∗
(f ) = f
◦ π.
Let us denote by R(x, a) the orbit map f
→ a + df(x). Let p be a path of T
∗
X
such that p(0) = (x
0
, a
0
) and p(1) = (x
1
, a
1
). We get
Ψ(p)
=
ˆ
p
∗
(KdLiouv)
=
ˆ
p
∗
(ˆ
1
∗
(Liouv)
− ˆ0
∗
(Liouv)
− dKLiouv)
=
(ˆ
1
◦ ˆp)
∗
(Liouv)
− (ˆ0 ◦ ˆp)
∗
(Liouv)
− d[(KLiouv) ◦ ˆp]
=
R(x
1
, a
1
)
∗
(Liouv)
− R(x
0
, a
0
)
∗
(Liouv)
− d[f → KLiouv(ˆp(f))].
Let us consider first the term [f
→ KLiouv(ˆp(f))]. Let p(t) = (x
t
, a
t
), so ˆ
p(f ) =
[t
→ (x
t
, a
t
+ df (x
t
))]. Thus,
KLiouv(ˆ
p(f )))
=
1
0
a
t
[s
→ x
s
]
s=t
dt +
1
0
df [t
→ x
t
] dt
=
1
0
a
t
[s
→ x
s
]
s=t
dt + f (x
1
)
− f(x
0
).
Thus,
d[f
→ KLiouv(ˆp(f))] = d[f →
1
0
a
t
[s
→ x
s
]
s=t
dt + f (x
1
)
− f(x
0
)]
=
d[f
→ f(x
1
)
− f(x
0
)].
Let us compute now R(x, a)
∗
(Liouv), for any (x, a)
∈ T
∗
X. Let P : U
→ C
∞
(X, R)
be a plot. We have
R(x, a)
∗
(Liouv)(P)
=
Liouv(R(x, a)
◦ P)
=
Liouv(r
→ P(r)(x, a))
=
Liouv(r
→ a + d[P(r)](x))
=
(a + d[P(r)](x))(r
→ x)
=
0
because the 1-form a + d[P(r)](x) is evaluated on the constant plot r
→ x. And,
every form evaluated to a constant plot vanishes. So, we get finally
Ψ(p) = d[f
→ f(x
0
)]
− d[f → f(x
1
)].
Now, clearly Ψ() = 0 for every loop of T
∗
X, and the action of C
∞
(X, R) is
hamiltonian Γ =
{0}. So, ψ((x
0
, a
0
), (x
1
, a
1
)) = μ(x
1
, a
1
)
− μ(x
0
, a
0
), with the
moment map
μ : (x, a)
→ −d[f → f(x)] = −dδ
x
.
Let us check now the invariance of the moment map μ. Note that, for every h
∈
C
∞
(X, R), we have δ
x
◦ L(h) = [f → f(x) + h(x)]. So, for every h ∈ C
∞
(X, R) we
have ˆ
h
∗
(μ)(x, a) = ˆ
h
∗
(
−dδ
x
) =
−d(δ
x
◦ L(h)) = −d[f → f(x) + h(x)] = −d[f →
f (x)] =
−dδ
x
= μ(x, a). Hence, μ is invariant. The 2-points moment map ψ is
exact. Souriau’s class of the action of C
∞
(X, R) on T
∗
X vanishes.

50
PATRICK IGLESIAS-ZEMMOUR
11.2. On the intersection 2-form of a surface I. Let Σ be a closed surface
oriented by a 2-form Surf, chosen once and for all. Let us consider Ω
1
(Σ), the
infinite dimensional vector space of 1-forms of Σ, equipped with the functional
diffeology. Let us consider the antisymmetric bilinear map defined on Ω
1
(Σ) by
(α, β)
→
Σ
α
∧ β,
for all α, β in Ω
1
(Σ). Since the wedge-product α
∧ β is a 2-form of Σ, there exists a
real smooth function ϕ
∈ C
∞
(Σ, R) such that α
∧ β = ϕ × Surf. So, by definition,
Σ
α
∧ β =
Σ
ϕ
× Surf.
1) To the above bilinear form is naturally associated a well defined differential
2-form ω of Ω
1
(X). For every n-plot P : U
→ X, for all r ∈ U, δr and δ
r in R
n
,
ω(P)
r
(δr, δ
r) =
Σ
∂P(r)
∂r
(δr)
∧
∂P(r)
∂r
(δ
r)
2) The 2-form ω is the differential of the 1-form λ defined on Ω
1
(Σ) by,
λ(P)
r
(δr) = 1
2
Σ
P(r)
∧
∂P(r)
∂r
(δr)
and
ω = dλ.
3) Let us consider now the the additive group (C
∞
(Σ, R), +) of smooth real
functions of Σ. And, let us define the following action of C
∞
(Σ, R) on Ω
1
(Σ).
For all f
∈ C
∞
(Σ, R),
f
→ ¯
f = [α
→ α + df].
So, the additive group C
∞
(Σ, R) acts by automorphisms on the pair (Ω
1
(Σ), ω).
For all f in C
∞
(Σ, R),
f
∗
(ω) = ω.
Note that the kernel of the action f
→ ¯
f is the subgroup of constant maps. And,
the image of C
∞
(Σ, R) is just the group B
1
DR
(Σ) of exact 1-forms of Σ.
4) Let p
∈ Paths(Ω
1
(Σ)) be a path connecting α
0
to α
1
. The paths moment
map Ψ(p) is given by
Ψ(p) =
ˆ
α
∗
1
(λ) + d
f
→ 1
2
Σ
f
× dα
1
−
ˆ
α
∗
0
(λ) + d
f
→ 1
2
Σ
f
× dα
0
.
On this expression, we check immediately that the 2-points moment map is just
given by ψ(α
0
, α
1
) = Ψ(p), for any path p connecting α
0
to α
1
. Note that, since
Ω
1
(Σ) is contractible the holonomy of the action of C
∞
(Σ, R) vanishes, Γ =
{0},
the action of C
∞
(Σ, R) is hamiltonian.
5) The moment maps of this action of C
∞
(Σ, R) on Ω
1
(Σ) are, up to a constant,
equal to
μ : α
→ d
f
→
Σ
f
× dα
.
Moreover, the moment map μ is equivariant. That is, invariant, since the group
C
∞
(Σ, R) is abelian.
For all f
∈ C
∞
(Σ, R),
μ
◦ ¯
f = μ.
So, the action of C
∞
(Σ, R) on Ω
1
(Σ) is exact and hamiltonian.
Note
— The moment map μ(α) is fully characterized by dα. This is why we
find in the mathematical literature on the subject that, the moment map for this
action is the exterior derivative (or curvature, depending on the authors) α
→ dα.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
51
But, as we see again on this example, diffeology gives to this sketchy assertion a
precise meaning.
Let us remark also that, the moment map μ is linear, for all t, s reals and all α
and β in Ω
1
(Σ), μ(t α + s β) = t μ(α) + s μ(β). And, the kernel of μ is the subspace
of closed 1-forms,
ker(μ) = Z
1
DR
(Σ) =
α
∈ Ω
1
(Σ)
| dα = 0
If we consider the orbit of the zero form 0
∈ Ω
1
(Σ) by C
∞
(Σ, R), this is just
the subspace B
1
(Σ, R), which is included in ker(μ) = Z
1
DR
(Σ).
The quotient
ker(μ)/C
∞
(Σ, R) is just Z
1
DR
(Σ)/B
1
DR
(Σ) = H
1
DR
(Σ), and the 2-form ω
ker(μ)
is just the pullback of the usual intersection form on H
1
DR
(Σ). I will discuss, in a
future work, the notion of « symplectic reduction » in diffeology.
Proof.
1) Let us check that ω defines a differential 1-form on Ω
1
(Σ). Note
that, for any r
∈ U = dom(P), P(r) is a section of the ordinary cotangent bundle
T
∗
Σ. That is, P(r) = [x
→ P(r)(x)] ∈ C
∞
(Σ, T
∗
Σ), where P(r)(x)
∈ T
∗
x
(Σ). So,
∂P(r)
∂r
(δr) = [x
→
∂P(r)(x)
∂r
(δr)]
and
∂P(r)(x)
∂r
(δr)
∈ T
∗
x
(Σ)
where ∂P(r)(x)/∂r denotes the tangent linear map D(r
→ P(r)(x)(r). And, the
formula giving ω is well defined. Now, ω(P)
r
is clearly antisymmetric and depends
smoothly on r. So, ω(P) is a smooth 2-form of U. Let us check that P
→ ω(P)
defines a 2-form on Ω
1
(Σ). That is, satisfies the compatibility condition ω(P
◦ F) =
F
∗
(ω(P)), for all F
∈ C
∞
(V, U), where V is a numerical domain. Let s
∈ V, δs and
δ
s two tangent vectors at s at V, let r = F(s):
ω(P
◦ F)
s
(δs, δ
s)
=
Σ
∂P
◦ F(s)
∂s
(δs)
∧
∂P
◦ F(s)
∂s
(δ
s)
=
Σ
∂P(r)
∂r
∂F(s)
∂s
(δs)
∧
∂P(r)
∂r
∂F(s)
∂s
(δ
s)
=
ω(P)
F(s)
(DF
s
(δs), DF
s
(δ
s))
=
F
∗
(ω(P))
s
(δs, δ
s)
Thus ω(P
◦ F) = F
∗
(ω(P)), and ω is a well defined 2-form on Ω
1
(Σ).
2) First of all, the proof that the map P
→ λ(P) is a well defined differential
1-form of Ω
1
(Σ) is analogous to the proof of the first item. Now, let us remind that
ω = dλ is and only if d(λ(P)) = ω(P) for all plot P of Ω
1
(Σ). Let us apply the
usual formula of differentiation of 1-form on numerical domain,
d
r
(δr, δ
r) = δ(
r
(δ
r))
− δ
(
r
(δr))
where δ and δ
are to commuting variations. For the sake of simplicity let us denote
α = P(r),
δα =
∂P(r)
∂r
(δr),
δ
α =
∂P(r)
∂r
(δ
r).
So,
d(λ(P))
r
(δr, δ
r)
=
1
2
δ
Σ
α
∧ δ
α
− δ
Σ
α
∧ δα
=
1
2
Σ
δα
∧ δ
α + α
∧ δδ
α
−
Σ
δ
α
∧ δα + α ∧ δ
δα
.
52
PATRICK IGLESIAS-ZEMMOUR
but, δδ
α = δ
δα. So,
d(λ(P))
r
(δr, δ
r)
=
1
2
Σ
δα
∧ δ
α
−
Σ
δ
α
∧ δα
=
1
2
Σ
δα
∧ δ
α +
Σ
δα
∧ δ
α
=
Σ
δα
∧ δ
α
=
ω
r
(δr, δ
r).
3) Let us compute the pullback of λ by the action of f
∈ C
∞
(Σ, R). Let
P : U
→ Ω
1
(Σ) be a n-plot, let r
∈ U and δr ∈ R
n
.
¯
f
∗
(λ)(P)
r
(δr)
=
λ( ¯
f
◦ P)
r
(δr)
=
λ(r
→ P(r) + df)
r
(δr)
=
1
2
Σ
(P(r) + df )
∧
∂P(r)
∂r
(δr)
=
1
2
Σ
P(r)
∧
∂P(r)
∂r
(δr) + 1
2
Σ
df
∧
∂P(r)
∂r
(δr)
=
λ(P)
r
(δr) +
∂
∂r
1
2
Σ
df
∧ P(r)
(δr)
=
λ(P)
r
(δr)
−
∂
∂r
1
2
Σ
f
× d(P(r))
(δr)
So, for every f
∈ C
∞
(Σ, R), let us define the map ϕ(f ) : Ω
1
(Σ)
→ R by,
ϕ(f ) : α
→ 1
2
Σ
f
× dα.
So,
d(ϕ(f ))(P)
r
(δr) =
∂
∂r
1
2
Σ
f
× d(P(r))
(δr).
Thus,
¯
f
∗
(λ)(P)
r
(δr) = λ(P)
r
(δr)
− (dϕ(f))(P)
r
(δr).
That is,
¯
f
∗
(λ) = λ
− d(ϕ(f)).
Therefore, differential ω = dλ is invariant by the action of C
∞
(Σ, R).
4) Let p be a path of Ω
1
(Σ) connecting α
0
to α
1
. By definition Ψ(p) = ˆ
p
∗
(Kω).
Applying the property of the chain-homotopy operator d
◦ K + K ◦ d = ˆ1
∗
− ˆ0
∗
to
ω = dλ, we get
Ψ(p)
=
ˆ
p
∗
(Kdλ)
=
ˆ
p
∗
(ˆ
1
∗
(λ)
− ˆ0
∗
(λ)
− d(Kλ))
=
(ˆ
1
◦ ˆp)
∗
(λ)
− (ˆ0 ◦ ˆp)
∗
(λ)
− d[(Kλ) ◦ ˆp]
=
ˆ
α
∗
1
(λ)
− ˆα
∗
0
(λ)
− d[f → Kλ(ˆp(f))]
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
53
But, Kλ(ˆ
p(f )) = Kλ( ¯
f
◦ p) =
¯
f
◦p
λ =
p
¯
f
∗
(λ), and since ¯
f
∗
(λ) = λ
− d(ϕ(f)) we
have Kλ(ˆ
p(f )) =
p
λ
−
p
d(ϕ(f )) =
p
λ
− ϕ(f)(α
1
) + ϕ(f )(α
0
). Therefore,
Ψ(p)
=
ˆ
α
∗
1
(λ)
− ˆα
∗
0
(λ)
− d[f → −ϕ(f)(α
1
) + ϕ(f )(α
0
)]
=
ˆ
α
∗
1
(λ)
− ˆα
∗
0
(λ) + d
f
→ 1
2
Σ
f
× dα
1
− 1
2
Σ
f
× dα
0
And, finally we get the paths moment map Ψ given by
Ψ(p) =
ˆ
α
∗
1
(λ) + d
f
→ 1
2
Σ
f
× dα
1
−
ˆ
α
∗
0
(λ) + d
f
→ 1
2
Σ
f
× dα
0
For the the 2-points moment map ψ, we have clearly ψ(α
0
, α
1
) = Ψ(p) for any path
connecting α
0
to α
1
.
5) The 1-point moment maps are given by μ(α) = ψ(α
0
, α) for any origin α
0
.
Let us choose α
0
= 0. So,
μ(α) = ˆ
α
∗
(λ) + d
f
→ 1
2
Σ
f
× dα
− ˆ0
∗
(λ).
But ˆ
0
∗
(α) is not necessarily zero. Let us compute generally ˆ
α
∗
(λ). Let P : U
→
Ω
1
(Σ) be a n-plot. We have, ˆ
α
∗
(λ)(P) = λ( ˆ
α
◦ P) = λ(r → ˆα(P(r)) = λ(r →
α + d(P(r))). But,
λ(r
→ α + d(P(r))) = 1
2
Σ
(α + P(r))
∧
∂
∂r
(α + d(P(r)))
=
1
2
Σ
(α + P(r))
∧
∂d(P(r))
∂r
=
1
2
Σ
α
∧
∂d(P(r))
∂r
+ 1
2
Σ
P(r)
∧
∂d(P(r))
∂r
.
So,
( ˆ
α
∗
(λ)
− ˆ0
∗
(λ))(P) = 1
2
Σ
α
∧
∂d(P(r))
∂r
.
Therefore,
μ(α)(P)
r
=
( ˆ
α
∗
(λ)
− ˆ0
∗
(λ))(P)
r
+ d
f
→ 1
2
Σ
f
× dα
(P)
r
=
1
2
Σ
α
∧
∂d(P(r))
∂r
+
∂
∂r
1
2
Σ
P(r)
× dα
=
1
2
∂
∂r
Σ
α
∧ d(P(r)) + P(r) × dα
=
∂
∂r
Σ
P(r)
× dα
.
So, we get finally,
μ(α) = d
f
→
Σ
f
× dα
.
Now, let us express the variance of μ. Let f
∈ C
∞
(Σ, R), and let F(α) be the real
function F(α) : f
→
Σ
f
×dα, such that μ(α) = dF(α). We have, μ( ¯
f (α)) = μ(α +
df ) = dF(α + df ). But, for every h
∈ C
∞
(Σ, R), F(α + df )(h) =
Σ
h
× d(α + df) =
Σ
h
× dα = F(α)(h). So, for all f ∈ C
∞
(Σ, R), we have μ
◦ ˆ
f = μ. The moment
54
PATRICK IGLESIAS-ZEMMOUR
map μ is invariant by the group C
∞
(Σ, R). Souriau’s class vanishes. Thus, the
action of C
∞
(Σ, R) is exact and hamiltonian.
Let us compute finally the kernel of the moment map μ. We have: μ(α) = 0 if
and only if dF(α) = 0. But since C
∞
(Σ, R) is connected (actually contractible as
a diffeological vector space) dF(α) = 0 if and only if F(α) = const = F(α)(0) = 0.
But F(α) = 0 if and only if, for all f
∈ C
∞
(Σ, R),
Σ
f
× dα = 0. That is, if and
only if dα = 0.
11.3. On the intersection 2-form of a surface II. We continue with the
example of Subsection 11.2, using the same notations. Let us introduce the group
G of positive diffeomorphisms of (Σ, Surf). That is,
G =
g
∈ Diff(Σ)
g
∗
(Surf)
Surf
> 0
.
The group G acts by pushforward on Ω
1
(Σ). For all g
∈ G, for all α ∈ Ω
1
(Σ),
g
∗
(α)
∈ Ω
1
(Σ), and for all pair g, g
of elements of G, (g
◦ g
)
∗
= g
∗
◦ g
∗
. And, this
action is smooth. Now,
(1) The pushforward action of G on Ω
1
(Σ) preserves the 1-form λ, and thus
the 2-form ω. For all g
∈ G, (g
∗
)
∗
(λ) = λ, and (g
∗
)
∗
(ω) = ω. So, the
action of G is exact, σ = 0, and hamiltonian, Γ =
{0}.
(2) The moment maps are, up to a constant, equal to the moment μ, given
by
μ(α)(P)
r
(δr) = 1
2
Σ
α
∧ P(r)
∗
∂P(r)
∗
(α)
∂r
(δr)
,
for all α
∈ Ω
1
(Σ), for all n-plot P, where r
∈ dom(P) and δr ∈ R
n
. In
particular, applied to any 1-plot F centered at the identity 1
G
, that is
F(0) = 1
G
, we get the special expression
μ(α)(F)
0
(1) =
−1
2
Σ
α
∧ £
F
(α) =
−
Σ
i
F
(α)
× dα,
where £
F
(α) is the Lie derivative of α along F, and i
F
(α) the contraction
of α by F.
So, we find again, through the diffeological formalism of the moment map, what is
asserted informally in the literature. The vague assertion « the moment map of the
group of diffeomorphism is the Lie derivative » makes here sense.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
55
Proof.
1) Let us compute the pullback of λ by the action of g
∈ G, that is
(g
∗
)
∗
(λ). Let P : U
→ Ω
1
(Σ) be a n-plot, let r
∈ U, and δr ∈ R
n
. We have,
(g
∗
)
∗
(λ)(P)
r
(δr)
=
λ(g
∗
◦ P)
r
(δr)
=
1
2
Σ
g
∗
(P(r))
∧
∂g
∗
(P(r))
∂r
(δr)
=
1
2
Σ
g
∗
(P(r))
∧ g
∗
∂P(r)
∂r
(δr)
=
1
2
Σ
g
∗
P(r)
∧
∂P(r)
∂r
(δr)
=
1
2
g
∗
(Σ)
P(r)
∧
∂P(r)
∂r
(δr)
=
1
2
Σ
P(r)
∧
∂P(r)
∂r
(δr)
=
λ(P)
r
(δr)
Thus, λ is invariant by G, and so do ω = dλ.
2) Since the 1-form λ is invariant by the action of G, we can use directly the
results of the exact case detailed in Subsection 6.1. Thus, the moment maps are,
up to a constant, equal to μ : α
→ ˆα
∗
(λ). So, let P : U
→ G be a n-plot, let r ∈ U
and δr
∈ R
n
. We have,
μ(α)(P)
r
(δr)
=
α
∗
(λ)(P)
r
(δr)
=
λ( ˆ
α
◦ P)
r
(δr)
=
λ(r
→ P(r)
∗
(α))
r
(δr)
=
1
2
Σ
P(r)
∗
(α)
∧
∂P(r)
∗
(α)
∂r
(δr)
=
1
2
Σ
α
∧ P(r)
∗
∂P(r)
∗
(α)
∂r
(δr)
.
Now, let P = F be a 1-plot centered at the identity, F(0) = 1
G
. Let us change
the variable r for the variable t. The previous expression, computed at t = 0 and
applied to the vector δt = 1 gives immediately
μ(α)(F)
0
(1)
=
1
2
Σ
α
∧
∂F(t)
∗
(α)
∂t
t=0
.
But, by definition of the Lie derivative, we have
∂F(t)
∗
(α)
∂t
t=0
=
∂(F(t)
−1
)
∗
(α)
∂t
t=0
=
−£
F
(α).
So, we get the first expression of the moment map μ applied to F
μ(α)(F)
0
(1) =
−1
2
Σ
α
∧ £
F
(α).
Now, on a surface α
∧dα = 0, and i
F
(α
∧dα) = i
F
(α)
×dα−α∧i
F
(dα). So, i
F
(α)
×
dα = α
∧ i
F
(dα). Then, using the Cartan-Lie formula £
F
(α) = i
F
(dα) + d(i
F
(α)),
56
PATRICK IGLESIAS-ZEMMOUR
we get
Σ
α
∧ £
F
(α)
=
Σ
α
∧ [i
F
(dα) + d(i
F
(α))]
=
Σ
i
F
(α)dα +
Σ
α
∧ d(i
F
(α))
=
Σ
i
F
(α)dα +
Σ
i
F
(α)dα
−
Σ
d[α
∧ i
F
(α)]
=
2
Σ
i
F
(α)dα
And finally, we have the second expression for the moment map:
μ(α)(F)
0
(1) =
−
Σ
i
F
(α)
× dα,
for any 1-plot of the group of positive diffeomorphisms of the surface Σ, centered
at the identity.
11.4. On the intersection 2-form of a surface III. We continue again
with the example of Subsection 11.2, using the same notations. Let us consider the
space Ω
1
(Σ) as an additive group acting onto itself by translations. Let us denote
by t
β
the translation t
β
: α
→ α + β, where α and β belong to Ω
1
(Σ).
(1) The 2-form ω is invariant by translation. That is, t
∗
α
(ω) = ω for all
α
∈ Ω
1
(Σ). This action of Ω
1
(Σ) onto itself is hamiltonian but not exact.
(2) The moment maps of the additive action of Ω
1
(Σ) onto itself are equal,
up to a constant to
μ : α
→ d
β
→
Σ
α
∧ β
.
In other words, μ(α) = d[ω(α)], where ω is regarded as the smooth linear
function ω(α) : β
→ ω(α, β), defined on Ω
1
(Σ). Moreover, the moment
map μ is linear and injective.
(3) The moment map μ is its own Souriau cocycle, θ = μ. The moment map
μ identifies Ω
1
(Σ) with the θ-affine coadjoint orbit of 0
∈ Ω
1
(Σ)
∗
. Be
aware that Ω
1
(Σ)
∗
denotes the space of invariant 1-forms of the abelian
group Ω
1
(Σ), and not its algebraic dual.
Note
— This situation is analogous to what happens for finite dimension
symplectic vector spaces. The 2-form ω can be regarded as a real 2-cocycle of the
additive group Ω
1
(Σ). This cocycle build up a central extension by R,
(α, t)
· (α
, t
) =
α + α
, t + t
+
Σ
α
∧ α
for all (α, t) and (α
, t
) in Ω
1
(Σ)
× R. This central extension acts on Ω
1
(Σ),
preserving ω. This action is hamiltonian, but now exact. The lack of equivariance,
characterized by Souriau’s class, has been absorbed in the extension. This group
could be named as the Heisenberg group of the oriented surface (Σ, Surf).
Note also that, according to Subsection 10.2, the space Ω
1
(Σ) equipped with the
2-form ω is an homogeneous symplectic space. Thus, we have a first simple example
of infinite dimensional symplectic diffeological space, avoiding any discussion on the
« kernel » of ω.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
57
Proof.
Let us compute the pullback of λ by a translation. Let P : U
→ X be
a n-plot, let r
∈ U, and δr ∈ R
n
. We have,
t
∗
α
(λ)(P)
r
(δr)
=
λ(t
α
◦ P)
r
(δr)
=
λ[r
→ P(r) + α]
r
(δr)
=
1
2
Σ
(P(r) + α)
∧
∂(P(r) + α)
∂r
(δr)
=
1
2
Σ
P(r)
∧
∂P(r)
∂r
(δr) + 1
2
Σ
α
∧
∂P(r)
∂r
(δr)
=
λ(P)
r
(δr) + d
β
→ 1
2
Σ
α
∧ β
(P)
r
(δr)
So, let us define, for all α
∈ Ω
1
(Σ), the smooth real function F(α) by
F(α) : β
→ 1
2
Σ
α
∧ β.
Such that
t
∗
α
(λ) = λ + d(F(α))
and
t
∗
α
(ω) = ω.
Then, Ω
1
(Σ), as an additive group, acts on itself by automorphisms. Let us compute
the moment maps. Let p be a path of Ω
1
(Σ), connecting α
0
to α
1
. We have
Ψ(p)
=
ˆ
α
∗
1
(λ)
− ˆα
∗
0
(λ)
− d
β
→
p
d(F(β))
=
ˆ
α
∗
1
(λ)
− ˆα
∗
0
(λ)
− d[β → F(β)(α
1
)
− F(β)(α
0
)]
=
{α
∗
1
(λ)
− d[β → F(β)(α
1
)]
} − {α
∗
0
(λ)
− d[β → F(β)(α
0
)]
}
=
{ˆα
∗
1
(λ) + d(F(α
1
))
} − {ˆα
∗
0
(λ) + d(F(α
0
))
}.
So, the 2-points moment map Subsection 4.1 is given by ψ(α
0
, α
1
) = Ψ(p). Now,
the moment maps are, up to a constant equal to
μ(α) = ψ(0, α) = ˆ
α
∗
1
(λ) + d(F(α))
− ˆ0
∗
(λ).
But, for any plot P : U
→ Ω
1
(Σ), we have
ˆ
α
∗
(λ)(P)
− ˆ0
∗
(λ)(P)
=
λ( ˆ
α
◦ P) − λ(ˆ0 ◦ P)
=
λ(r
→ P(r) + α) − λ(r → P(r))
=
d
β
→ 1
2
Σ
α
∧ β
(P)
=
d(F(α))(P).
Thus, ˆ
α
∗
(λ)(P)
− ˆ0
∗
(λ) = d(F(α)) and the moment map μ is finally given by
μ(α) = 2d(F(α)) = d
β
→
Σ
α
∧ β
.
The moment map μ is not equivariant, and Souriau’s cocycle θ is given by,
μ(t
∗
α
(β)) = μ(α + β) = μ(β) + θ(α)
with
θ(α) = μ(α).
So, the moment map μ is clearly smooth and linear. Let α
∈ ker(μ), μ(α) = 0 if
and only if d(F(α)) = 0, that is if and only if F(α) = const = F(α)(0) = 0. Thus,
F(α)(β) = 0 for any β
∈ Ω
1
(Σ), hence α = 0. Therefore, the moment map μ is
injective.
58
PATRICK IGLESIAS-ZEMMOUR
11.5. On symplectic irrational tori. Let us consider the numerical space
R
n
, for some integer n. For all u
∈ R
n
, let us denote by t
u
the translation by u.
That is, t
u
: x
→ x + u. Let ω be a 2-form of R
n
invariant by translations. That
is, for all u
∈ R
n
, t
∗
u
(ω) = ω. Thus, ω is a constant bilinear 2-form, necessarily
closed, dω = 0. Let us consider the moment maps associated to the translations
(R
n
, +). Since R
n
is simply connected, the holonomy vanishes, Γ =
{0}. Let p be
a path of R
n
connecting x = p(0) to y = p(1), the paths moment map Ψ(p), and
the 2-points moment map ψ(p) are given by
Ψ(p) = ψ(x, y) = ω(y
− x),
where ω(u) is regarded as the linear 1-form ω(u) : v
→ ω(u, v). So, the moment
maps are, up to constant, equal to the linear map
μ : x
→ ω(x).
And therefore, Souriau’s cocycle θ associated to μ is equal to μ. For all u
∈ R
n
,
θ(u) = μ(u) = ω(u).
Let us consider now a discrete diffeological subgroup K
⊂ R
n
. Let us denote by
Q the quotient Q = R
n
/K and by π : R
n
→ Q the canonical projection. Let us
continue to denote by t
u
the translation on Q, by u
∈ R
n
. That is t
u
(q) = π(x + u)
for any x such that q = π(x). Now, since ω is invariant by translations, ω is
invariant by K, and since K is discrete, ω projects on Q as a R
n
-invariant closed
2-form denoted by ω
Q
. That is,
ω
Q
= π
∗
(ω)
or
ω = π
∗
(ω
Q
).
Note that, the translation by any vector u of R
n
on Q is still an automorphism of
ω
Q
, that is t
∗
u
(ω
Q
) = ω
Q
.
(1) The holonomy Γ
Q
of the action of (R
n
, +) on (Q, ω
Q
) is the image of the
subgroup K by μ.
Γ
Q
= μ(K),
Γ
Q
⊂ R
n
∗
.
Thus, if ω
= 0 and if K is not reduce to {0}, then the action of (R
n
, +)
on (Q, ω
Q
) is not hamiltonian and not exact.
(2) The moment map μ : R
n
→ R
n
∗
projects on a moment μ
Q
such that the
following diagram commutes.
Q = R
n
/K
R
n
∗
/μ(K)
-
μ
Q
R
n
R
n
∗
-
μ
?
π
?
pr
That is, for all q
∈ Q, μ
Q
(q) = pr(ω(x)) for any x such that q = π(x).
Souriau’s cocycle θ
Q
associated to μ
Q
, for all u
∈ R
n
, is given by
θ
Q
(u) = μ
Q
(π(u)).
So, if we consider the space Q as an additive group acting on itself by
translations, then the moment map μ
Q
, of this action, coincide with its
Souriau cocycle θ
Q
.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
59
(3) The map μ is a fibration onto its image whose fiber is the kernel of μ. That
is val(μ)
R
n
/E, E = ker(μ). And, the map μ
Q
is a fibration onto its
image μ(R
n
)/μ(K) whose fiber is ker(μ
Q
) = E/(K
∩ E). If ω : R
n
→ R
n
∗
is injective (which implies that n is even) then the moment map μ
Q
is a
diffeomorphism which identifies Q with its image R
n
∗
/μ(K).
Note 1
— Regarded as a group Q = R
n
/K acts onto itself by projection of
the translations of R
n
. Since the pullback by π : R
n
→ Q is an isomorphism from
Q
∗
to R
n
∗
(R
n
is the universal covering of Q), the moment maps computed above
give the moment maps associated to this action.
Note 2
— This construction applies to the torus T
2
= R
2
/Z
2
. The action
of (R
2
, +), is obviously not hamiltonian, but the moment map μ
T
2
is well defined.
And, μ
T
2
identifies T
2
with the quotient of R
2
∗
— the (Γ
Q
, θ
Q
)-coadjoint orbit
of the point 0 — by the holonomy Γ
Q
= ω(Z
2
)
⊂ R
2
∗
. In the meaning we gave
above of the notion of coadjoint orbit, the torus T
2
, equipped with the standard
symplectic form ω, is a coadjoint orbit of R
2
, or even a coadjoint orbit of itself.
This is a special case of the the Subsection 9.3 discussion.
Note 3
— All this construction above can be also applied to situations which
are regarded as more singular that the simple quotient of R
n
by a lattice. It
can by applied as well to the product of any irrational tori. An (n-dimensional)
irrational torus T
K
is the quotient of R
n
by any generating discrete strict subgroup
K of R
n
. See for example [IL90] for an analysis of 1-dimensional irrational tori.
For example, we can consider the product of two 1-dimensional irrational torus
Q = T
H
× T
K
, quotient of R
2
= R
× R by the discrete subgroup α
H
(Z
p
)
× α
K
(Z
q
),
where α
H
: R
p
→ R and α
K
: R
q
→ R are two linear 1-forms. In this case, the
moment map μ
Q
will also identify T
H
× T
K
with the quotient of R
2
∗
— (Γ
Q
, θ
Q
)-
coadjoint orbit of 0 — by Γ
Q
= ω(α
H
(Z
p
)
× α
K
(Z
q
)). This is the simplest example
of totally irrational symplectic space, and totally irrational coadjoint orbit. Note
that, these cases escape completely to the usual analysis, but also to the analysis
in terms of Sikorski’s or Fr¨
olicher’s spaces.
Proof.
First of all, the fact that there exists a closed 2-form ω
Q
on R/K such
that π
∗
(ω
Q
) = ω is an application of the criterion of pushing forward forms, in
the special case of a covering [Piz05]. Now, the computation of the moment map
of a linear antisymmetric form ω on R
n
is well know, and independently of the
method gives the same result μ(x) = ω(x). The additive constant is fixed here by
the condition μ(0) = 0. But, the value of the paths moment map Ψ(p) can be found
as well by the method described above, applying the particular expression
Kω
p
(δp) =
1
0
ω
p(t)
( ˙
p(t), δp(t))dt
with
˙
p(t) =
dp(t)
dt
.
of the chain-homotopy operator for manifold.
Where p is a path and δp is a
« variation » of p. So, since the result depends only on the ends of the path, let us
choose, for any points x and y in R
n
, the connecting path p : t
→ x + t(y − x). Let
us remind that Ψ(p) = ˆ
p
∗
(Kω). Let u and δu in R
n
. Note that ˆ
p
∗
(t
u
) = t
u
◦ p =
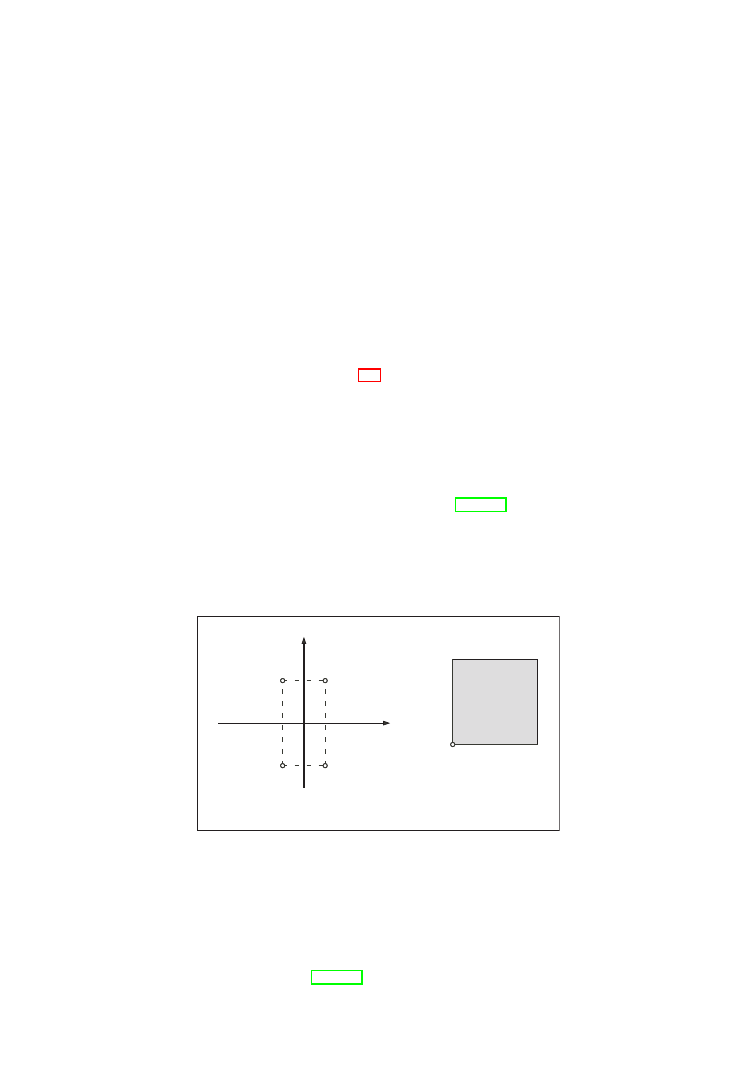
60
PATRICK IGLESIAS-ZEMMOUR
[t
→ p(t) + u]. So,
Ψ(p)
u
(δu)
=
ˆ
p
∗
(Kω)
u
(δu)
=
(Kω)
t
u
◦p
(δ(t
u
◦ p)), with δp = 0
=
1
0
ω( ˙
p(t), δu) d t
=
ω(y
− x, δu)
So Ψ(p) = ψ(x, y) = ω(y
− x) = ω(y) − ω(x). And, μ : x → ω(x), for all x in R
n
.
Now, let us consider ω
Q
. Since R
n
is the universal covering of Q, every loop
∈ Loops(Q, 0) can be lifted into a path p of R
n
starting at 0 and ending in K. In
other words,
Γ =
{Ψ() | ∈ Loops(Q)} = {Ψ(t → tk) | k ∈ K} = ω(K)
The other propositions are then a direct application of the functoriality of the
moment map described in Subsection 7.2, and standard analysis on quotients and
fibrations.
11.6. The corner orbifold. Let us consider the quotient
Q of R
2
by the
action of the finite subgroup K
{±1}
2
, embedded in GL(2, R) by
K =
ε
0
0
ε
ε,ε
∈ {±1}
.
The space
Q = R
2
/K is an orbifold, according to [IKZ05]. It is diffeomorphic
to the quarter space [0,
∞[×[0, ∞[⊂ R
2
, equipped with the pushforward of the
standard diffeology of R
2
by the map π : R
2
→ [0, ∞[×[0, ∞[, defined by,
π(x, y) = (x
2
, y
2
)
and
Q π
∗
(R
2
).
So the letter
Q will denote indifferently the quotient R
2
/K or the quarter space
Corner Orbifold
Plane
x
′
x
′′
x
′′′
x
ox
oy
0
Figure 1.
The corner orbifold
Q
π
∗
(R
2
). And the meaning of the letter π follows. Now, let us remark that, the
decomposition of
Q in terms of point’s structure is given by,
Str(0, 0) =
{±1}
2
,
Str(x, 0) = Str(0, y) =
{±1} and Str(x, y) = {1},
where x and y are positive real numbers. So, since the structure of a point is
preserved by diffeomorphisms [IKZ05], there are at least three orbits of Diff(
Q),
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
61
the point 0
Q
= (0, 0), the regular stratum ˙
Q =]0, ∞[
2
and the union of the two
axes, ox and oy. So, in particular any diffeomorphism of
Q preserves the origin 0
Q
.
Actually, these are exactly the orbits of Diff(
Q). Let us remark that, dim(Q) = 2
[Piz06-b]. So, every 2-form is closed. Now,
1) Every 2-form of
Q is proportional to the 2-form ω defined on Q by
π
∗
(ω) :
x
y
→ 4xy × dx ∧ dy.
That is, for any other 2-form ω
there exists a smooth function φ
∈ C
∞
(
Q, R) such
that ω
= φ
× ω.
2) The space (
Q, ω) is hamiltonian Γ
ω
=
{0}. And, the action of G
ω
is exact,
that is σ
ω
= 0. In particular, the universal moment map μ
ω
defined by μ
ω
(0
Q
) = 0,
is equivariant.
3) The universal equivariant moment map μ
ω
vanishes on the singular strata
{0}, ox and oy, and is injective on the regular stratum ˙Q. So, the image μ
ω
(
Q) is
diffeomorphic to an open disc with a point attached on the boundary.
Proof.
1) Let ω
be a 2-form on
Q and let ˜ω
be its pullback by π, ˜
ω
=
π
∗
(ω
). So, there exists a smooth real function F such that ˜
ω
= F
× dx ∧ dy.
But, since π
◦ k = π, for all k ∈ K we get εε
F(εx, ε
y) = F(x, y), for all (x, y)
∈
R
2
and all ε, ε
in
{±1}. Thus, F(−x, y) = −F(x, y) and F(x, −y) = −F(x, y).
In particular, F(0, y) = 0 and F(x, 0) = 0. Therefore, since F is smooth, there
exists f
∈ C
∞
(R
2
, R) such that F(x, y) = 4xyf (x, y), with f (εx, ε
y) = f (x, y).
Therefore, ˜
ω
= f
× ˜ω, with ˜ω = 4xy × dx ∧ dy. Now ˜ω = d(x
2
)
∧ d(y
2
), but x
→ x
2
and y
→ y
2
are invariant by K so, they are the pullback by π of some smooth
real functions on
Q. Thus, d(x
2
) and d(y
2
) are the pullback of 1-forms on
Q, let
us say d(x
2
) = π
∗
(ds) and d(y
2
) = π
∗
(dt), so ˜
ω = π
∗
(ω), where ω = ds
∧ dt is a
well defined 2-form on
Q. Now, since f(x,
y) = f (x, y) means just that f is the
pullback of a smooth real function φ on
Q, it follows that any 2-form ω
on
Q is
proportional to ω, that is ω
= φ
× ω, with φ ∈ C
∞
(
Q, R).
2) The orbifold is contractible. The deformation retraction (s, x, y)
→ (sx, sy)
of R
2
to
{(0, 0)} projects on a smooth deformation retraction of Q. So, there is no
holonomy, Γ =
{0}. Now, since the origin 0
Q
is the only point with structure
{±1},
every diffeomorphism of
Q preserves the origin 0
Q
. So, the 2-point moment map is
exact, see the note 2 of Subsection 5.2, Souriau’s cocycle vanishes, σ
ω
= 0. Let q
be any point of
Q and let μ
ω
(q) = ψ(0
Q
, q). This is an equivariant moment map
and μ
ω
(0
Q
) = ψ(0
Q
, 0
Q
) = 0.
3) Let q
∈ Q, thus μ
ω
(q) = Ψ(p) for any path p connecting 0
Q
to q. Now, let
q belongs to a semi-axis ox or oy, and let us choose p = t
→ λ(t)q, where λ is a
smashing function equal to 0 on ]
− ∞, 0] and equal to 1 on [1, +∞[. Thus for all
t
∈ R, p(t) belongs to the same semi-axis than q. Thanks to the expression ♥ of
Subsection 3.2, we have for any 1-plot φ of Diff(
Q, ω
ω
), centered at the identity,
Ψ(p)(φ)
0
(1) =
1
0
ω
s
r
→ φ(r)(λ(s + t)q)
(
0
0
)
1
0
0
1
dt,
But, now (s, r)
→ φ(r)(λ(s + t)q) is a plot of the semi-axis, and thanks to the
item 1, the form ω vanishes on the semi-axis.
So, the integrand vanishes and
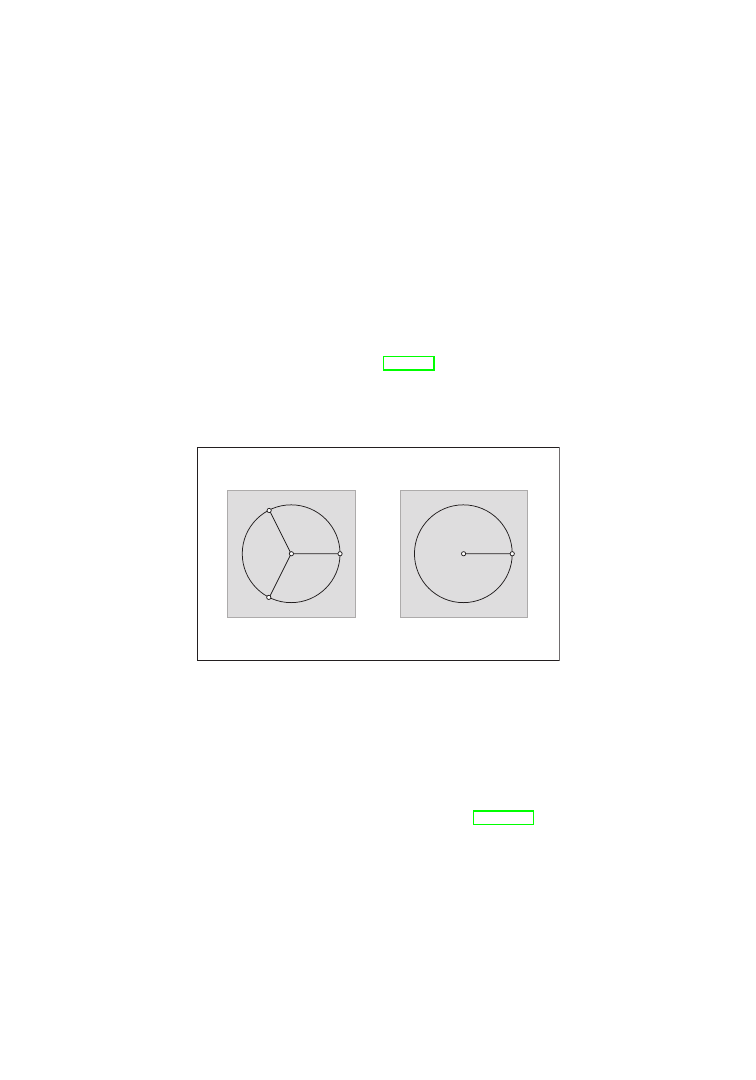
62
PATRICK IGLESIAS-ZEMMOUR
Ψ(p)(φ)
0
(1) = 0. Now, since 1-forms are characterized by 1-plots and since mo-
menta are characterized by centered plots, μ
ω
(q) = 0 for all q
∈ Q belonging to any
semi-axis.
On the other hand, let q and q
be two points of the regular stratum ˙
Q. Since
π
{(x, y) | x > 0 & y > 0} is a diffeomorphism, and since ˜ω {(x, y) | x > 0 & y >
0
} is symplectic there exists always a symplectomorphism φ with compact support
S ⊂ {(x, y) | x > 0 & y > 0} which exchange q and q
. So, the image of this
diffeomorphism on ˙
Q can be extended by the identity on the whole Q. Therefore,
the automorphisms of ω are transitive on the regular stratum.
11.7. The cone orbifold. Let
Q
m
be the quotient of the smooth complex
plane C by the action of the cyclic subgroup
Z
m
{ζ ∈ C | ζ
m
= 1
} with m > 1.
The space
Q
m
is an orbifold, according to [IKZ05]. We identify
Q
m
to the complex
plane C, equipped with the pushforward of the standard diffeology by the map
π
m
: z
→ z
m
. That is, a plot of
Q
m
is any parametrization P of C which writes
locally P(r) = φ(r)
m
, where φ is a smooth parametrization of C. Let us remark
0
x
0
Plane
Cone Orbifold
x
′
x
x
′′
Figure 2.
The cone orbifold
Q
3
first that the decomposition of
Q
m
, in terms of structure group, is given by
Str(0) = Z
m
,
and
Str(z) =
{1} if z = 0.
And secondly that there is two orbits of Diff(
Q
m
), the point 0 and the regular
stratum ˙
Q
m
= C
− {0}. In particular any diffeomorphism of Q
m
preserves the
origin 0. It is not difficult to check that dim(
Q
m
) = 2 [Piz06-b], so every 2-form
on
Q
m
is closed. Now,
1) Every 2-form of
Q
m
is proportional to the 2-form ω uniquely defined by
π
∗
m
(ω) : z
→ dx ∧ dy with z = x + iy.
That is, for any other 2-form ω
there exists a smooth function f
∈ C
∞
(
Q
m
, R)
such that ω
= f
× ω.
2) The space (
Q, ω) is hamiltonian Γ
ω
=
{0}. And, the action of G
ω
is exact,
that is σ
ω
= 0. In particular, the universal moment map μ
ω
defined by μ
ω
(0) = 0,
is equivariant.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
63
3) The universal moment map μ
ω
is injective. Its image is the reunion of two
coadjoint orbits, the point 0
∈ G
∗
ω
, value of the origin of
Q
m
, and the image of the
regular stratum ˙
Q
m
.
Proof.
Let us first prove that the usual surface form Surf = dx
∧ dy is the
pullback of a 2-form ω defined on
Q
m
. We shall apply the standard criterion and
prove that for any two plots φ
1
and φ
2
of C such that π
m
◦ φ
1
= π
m
◦ φ
2
we have
Surf(φ
1
) = Surf(φ
2
). That is, φ
1
(r)
m
= φ
2
(r)
m
implies Surf(φ
1
) = Surf(φ
2
).
First of all let us recall that, since we are dealing with 2-forms, is is sufficient to
consider 2-plots. So, let the φ
i
be defined on some numerical domain U
⊂ R
2
. Let
r
0
∈ U, we split the problem into 2 cases.
1) φ
1
(r
0
)
= 0 — Thus φ
2
(r
0
)
= 0, there exists a open disk B centered at r
0
on which the φ
i
do not vanishes. Thus, the map r
→ ζ(r) = φ
2
(r)/φ
1
(r) defined
on B is smooth with values in Z
m
. But, since Z
m
is discrete there exists ζ
∈ Z
m
such that φ
2
(r) = ζ
× φ
1
(r) on B. Now, Surf is invariant by U(1)
⊃ Z
m
. Therefore
Surf(φ
1
) = Surf(φ
2
) on B.
2) φ
1
(r
0
) = 0 — Thus, φ
2
(r
0
) = 0. Now, we have Surf(φ
i
) = det(D(φ
i
))
×Surf,
where D(φ
i
) denotes the tangent map of φ
i
. We split this case into two sub-cases:
2.a) D(φ
1
)
r
0
is non-degenerate — Thus, thanks to the implicit function the-
orem, there exists a small open disk B around r
0
where φ
1
is a local diffeomor-
phisms onto its image. Since φ
1
(r)
m
= φ
2
(r)
m
, the common zero r
0
of both φ
1
and φ
2
is isolated. Thus, the map r
→ ζ(r) = φ
2
(r)/φ
1
(r) defined on B
− {r
0
}
is smooth, and for the same reason than in the first case, ζ is constant.
So,
φ
2
(r) = ζ
× φ
1
(r) on B
− {r
0
}. But, since φ
i
(r
0
) = 0, this equality extends on
B. Therefore Surf(φ
1
) = Surf(φ
2
) on B.
2.b) D(φ
1
)
r
0
is degenerate — Let u be in the kernel of D(φ
1
)
r
0
. We have φ
1
(r
0
+
su)
m
= φ
2
(r
0
+ su)
m
for enough small real s. Then, differentiating this equality
m times with respect to s, for s = 0 we get 0 = D(φ
1
)
r
0
(u)
m
= D(φ
2
)
r
0
(u)
m
.
Therefore, D(φ
2
)
r
0
is also degenerate at r
0
and thus 0 = Surf(φ
1
)
r
0
= Surf(φ
2
)
r
0
.
So, we have proved that for any r
∈ U, Surf(φ
1
)
r
= Surf(φ
2
)
r
. Therefore, there
exists a 2-form ω on
Q
m
such that π
∗
m
(ω) = Surf, and this form ω is completely
defined by its pullback. Now, since the pullback by π
m
of any other 2-form ω
on
Q
m
is proportional to Surf, the form ω
is proportional to ω.
Now, for the same reasons than in Subsection 11.6 the universal holonomy
Γ
ω
and Souriau’s class σ
ω
vanish, and the universal moment map μ
ω
defined by
μ
ω
(0) = 0
G
∗
is equivariant. Moreover, the regular stratum ˙
Q is just a symplectic
manifold for the restriction of ω. Any symplectomorphism with compact support
which doesn’t contain 0 can be extended to an automorphism of (
Q, ω). Thus, since
the compactly supported symplectomorphisms of a connected symplectic manifold
are transitive, the regular stratum ˙
Q is an orbit of Diff(Q, ω). Therefore, the
moment map μ
ω
maps
Q onto two orbits, {0
G
∗
} and μ
ω
( ˙
Q).
11.8. The infinite projective space. This example of the symplectic struc-
ture of the infinite projective space is extracted from [Piz06-a], everything not
proved here can be found there. Let
H be the Hilbert space of the square summa-
ble complex series.
H =
Z = (Z
i
)
∞
i=1
n
i=1
Z
i
· Z
i
<
∞
.
64
PATRICK IGLESIAS-ZEMMOUR
Where the dot denotes the hermitian product. The space
H is equipped with
the fine structure of complex diffeological vector space. That is, its diffeology is
generated by the linear injections from C
n
to
H, or if we prefer, let P : U → H be
a plot, then for every r
0
∈ U, there exists an integer n, an open superset V ⊂ U of
r
0
, a finite family
F = {(λ
a
, Z
a
)
}
a
∈A
, where the Z
a
∈ H, and the λ
a
∈ C
∞
(V, C
n
)
such that P
V : r →
a
∈A
λ
a
(r)
× Z
a
. Such a family
{(λ
a
, Z
a
)
}
a
∈A
is called a
local family of P at the point r
0
. We defined the symbol dZ which associates to
every local family
F = {(λ
a
, Z
a
)
}
a
∈A
defined on the domain V, the complex valued
1-form of V
dZ(
F) : r →
a
∈A
dλ
a
(r)Z
a
.
For every λ
a
= x
a
+ iy
a
, where x
a
and y
a
are real smooth parametrizations, dλ
a
=
dx
a
+ idy
a
. Now, there exists on
H a 1-form α defined by
α = 1
2i
[Z
· dZ − dZ · Z].
1) As an additive group (
H, +) acts on itself, preserving dα. Let Z ∈ H and let
t
Z
be the translation by Z, then t
∗
Z
(dα) = dα. This action is hamiltonian but not
exact. Let μ be the moment map of the translations (
H, +), defined by μ(0
H
) = 0.
So
μ(Z) = 2d[w(Z)]
with
w(ζ) : Z
→ 1
2i
[ζ
· Z − Z · ζ] ∈ C
∞
(
H, R).
The moment map μ is injective and (
H, dα) is an homogeneous symplectic space.
2) Let U(
H) be the group of unitary transformations of H, equipped with the
functional diffeology. The group U(
H) acts on H preserving α. The action of U(H)
on (
H, dα) is exact and hamiltonian. Let P : U → U(H) be a n-plot. The value of
the moment map μ of the action of U(
H) on (H, dα), evaluated on P is given by
μ(Z)(P)
r
(δr) = 1
2i
P(r)(Z)
·
∂P(r)(Z)
∂r
(δr)
−
∂P(r)(Z)
∂r
(δr)
· P(r)(Z)
,
where, r
∈ U , δr ∈ R
n
and:
If
P(r)(Z) =
loc
α
∈A
λ
α
(r)Z
α
,
then
∂P(r)(Z)
∂r
(δr) =
loc
α
∈A
∂λ
α
(r)
∂r
(δr)Z
α
.
3) The unit sphere
S ⊂ H is an homogeneous space of U(H). The fibers of the
equivariant moment map μ of the action of U(
H) on (S, dα S) are the fibers of
the infinite Hopf fibration π :
S → P = S/S
1
, where S
1
∈ C acts multiplicatively
on
S. There exists a symplectic form ω on P, such that π
∗
(ω) = dα
S. The
equivariant moment map of the induced action of U(
H) on P is injective. So, the
infinite projective space
P, equipped with the Fubini-Study form, is an homogeneous
symplectic space and can be regarded as a coadjoint orbit of U(
H).
Proof.
Many of what is asserted here has been proved in [Piz06-a]. So, we
shall just check what is not in this paper.
1) Since
H is contractible, there is no holonomy. Now, let ζ ∈ H and t
ζ
be
the translation t
ζ
(Z) = Z + ζ. A direct computation shows that, t
∗
ζ
(α) = α +
d[w(ζ)]. Thus, dα is invariant by translation t
∗
ζ
(dα) = dα. Now, let p be any path
connecting 0
H
to Z, we have μ(Z) = Ψ(p) = ˆ
p
∗
K(dα) = ˆ
Z
∗
(α)
− ˆ0
∗
H
(α)
− d[Kα ◦ ˆp].
But, on one hand we have ˆ
Z = t
Z
, thus ˆ
Z
∗
(α)
− ˆ0
∗
H
(α) = t
∗
Z
(α)
− 1
∗
H
(α) = α +
d[w(Z)]
− α = d[w(Z)]. And, on the other hand we have, ˆp(ζ) = t
ζ
◦ p, and
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
65
thus Kα
◦ ˆp =
t
ζ
◦p
α =
p
t
∗
ζ
(α) =
p
α +
p
d[w(ζ)] =
p
α + w(ζ)(Z), since
w(ζ)(0
H
) = 0. So, μ(Z) = d[w(Z)]
− d[ζ → w(ζ)(Z)]. But, w(ζ)(Z) = −w(Z)(ζ)
so μ(Z) = d[w(Z)]
− d[ζ → −w(Z)(ζ)] = 2d[w(Z)]. Now, let Z be in the kernel of
μ, so w(Z) = const = w(0
H
) = 0. But w(Z)(Z
) = 0 for all Z
∈ H if and only if
Z = 0
H
, we have just to decompose Z into real and imaginary parts and use the
fact that the hermitian norm on
H is not degenerated. Therefore, μ is injective.
2) Since the 1-form α is invariant by U(
H), this statement is a direct application
of Subsection 6.1.
11.9. The Virasoro coadjoint orbits. Let Imm(S
1
, R
2
) be the space of all
the immersions of the circle S
1
= R/2πZ into R
2
, equipped with the functional
diffeology. For every n-plot P : U
→ Imm(S
1
, R
2
) let us defined the 1-form α(P)
on U by
α(P)
r
(δr) =
2π
0
1
P(r)
(t)
2
P(r)
(t)
∂P(r)
(t)
∂r
(δr)
dt.
for every r
∈ U and δr ∈ R
n
. Where the prime denotes the derivative with respect
to the parameter t, and the bracket
· | · denotes the ordinary scalar product of
the vector space R
2
.
1. As defined above, α is a 1-form of Imm(S
1
, R
2
).
Let us consider now the group Diff
+
(S
1
) of positive diffeomorphisms of the circle,
and its action on Imm(S
1
, R
2
) by re-parametrization. For every ϕ
∈ Diff
+
(S
1
),
for every x
∈ Imm(S
1
, R
1
), let us denote by ¯
ϕ(x) the pushforward of x by ϕ,
¯
ϕ(x) = ϕ
∗
(x) = x
◦ ϕ
−1
.
And, let F : Diff
+
(S
1
)
→ C
∞
(Imm(S
1
, R
2
), R) be the map defined, for all ϕ
∈
Diff
+
(S
1
), by
F(ϕ) : x
→
2π
0
log
x
(t)
d log(ϕ
(t))
2. The map F is smooth and for every ϕ
∈ Diff(S
1
),
¯
ϕ
∗
(α) = α
− d[F(ϕ)].
So, the 2-form ω = dα, defined on Imm(S
1
, R
2
), is closed and invariant by
the action of Diff(S
1
). Moreover, the action of Diff(S
1
) is hamiltonian.
3. Let x
0
: class(t)
→ (cos(t), sin(t)) be the standard immersion from S
1
=
R/2πZ to R
2
. The moment maps for ω, of Diff
+
(S
1
) on the connected
component of x
0
∈ Imm(S
1
, R
2
), are translated by a constant from
μ(x)(r
→ ϕ)
r
(δr) =
2π
0
x
(u)
2
x
(u)
2
−
d
2
du
2
log
x
(u)
2
δu du.
Where r
→ ϕ is any plot of Diff
+
(S
1
) defined on some n-domain U, r is
a point of U, δr
∈ R
n
, u = ϕ
−1
(t), and δu = D(r
→ u)(r)(δr).
4. With the same conventions as in item 3,Souriau’s cocycles of the Diff
+
(S
1
)
action on Imm(S
1
, R
2
) are cohomologous to θ defined by,
θ(g)(r
→ ϕ)
r
(δr) =
2π
0
3γ
(u)
2
− 2γ
(u)γ
(u)
γ
(u)
2
δu du,
where g
∈ Diff
+
(S
1
) and γ = g
−1
. We recognize the integrand of the
right hand side as the so-called Schwartzian derivative of γ.
66
PATRICK IGLESIAS-ZEMMOUR
5. Let β be the function for all g and h in Diff
+
(S
1
) by
β(g, h) =
2π
0
log(g
◦ h)
(t) d log h
(t).
So, for all g and h in Diff
+
(S
1
) we have
F(g
◦ g
) = F(g)
◦ ¯g
+ F(g
)
− β(g, g
).
This function β is known as Bott’s cocycle [Bot78]. The central exten-
sion of Diff
+
(S
1
) by β is the so-called Virasoro group. Its action on
Imm(S
1
, R
2
), through Diff
+
(S
1
), is still hamiltonian, but now exact.
This is a well known construction which will be not more developed here.
This example which has been built on purpose [Igl95], gathers the main ingredients
found in the literature on the construction of Virasoro’s group. I regard this example
as a nice illustration of the whole theory.
Proof.
The proof is actually a long and tedious series of computations. To
make it as clear as possible, we shall split the computations in a few steps.
The 1-form α — We prove first that α is a well defined 1-form on Imm(S
1
, R
2
).
Let F : U
→ U be a smooth m-parametrization. We have, for all s ∈ V and all
δs
∈ R
m
,
α(P
◦ F)(s)(δs) =
2π
0
1
(P ◦ F)(s)
(t)
2
(P
◦ F)(s)
(t)
∂(P
◦ F)(s)
(t)
∂s
(δs)
dt
That is,
α(P
◦ F)(s)(δs) =
2π
0
1
P(F(s))
(t)
2
P(F(s))
(t)
∂P(F(s))
(t)
∂s
(δs)
dt.
Let us denote by r the point F(s). We get,
α(P
◦ F)(s)(δs) =
2π
0
1
P(r)
(t)
2
P(r)
(t)
∂P(r)
(t)
∂r
∂F(s)
∂s
(δs)
dt
=
α(P)
r=F(s)
∂F(s)
∂s
(δs)
=
F
∗
(α(P))
s
(δs).
So, α(P
◦ F) = F
∗
(α(P)), and α satisfies the differential form axiom.
Let us consider now the action of Diff
+
(S
1
) on Imm(S
1
, R
2
). This action is
obviously smooth from the very definition of the functional diffeology of Diff
+
(S
1
).
Let us denote ϕ
−1
by φ such that
¯
ϕ
∗
(α)(P) = α( ¯
ϕ
◦ P) = α[r → P(r) ◦ ϕ
−1
] = α[r
→ P(r) ◦ φ].
Note that Diff
+
(S
1
) acts on speed and acceleration of any immersion x, by
(
♥)
(x
◦ φ)
(t)
=
x
(φ(t))
· φ
(t)
(x
◦ φ)
(t)
=
x
(φ(t))
· φ
(t)
2
+ x
(φ(t))
· φ
(t).
Let us denote by Q the plot ¯
ϕ
◦ P, that is Q = [r → P(r) ◦ φ]. Such that,
α( ¯
ϕ
◦ P)
r
(δr) =
2π
0
1
Q(r)
(t)
2
Q(r)
(t)
∂Q(r)
(t)
∂r
(δr)
dt
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
67
for all r
∈ U and all δr ∈ R
n
. But, from
♥,
Q(r)
(t)
=
(P(r)
◦ φ)
(t) = P(r)
(φ(t))
· φ
(t)
Q(r)
(t)
=
(P(r)
◦ φ)
(t) = P(r)
(φ(t))
· φ
(t)
2
+ P(r)
(φ(t))
· φ
(t)
So, α( ¯
ϕ
◦ P)
r
(δr) is equal to the sum A + B of the two following integrals, related
to the decomposition of Q(r)
(t),
A =
2π
0
1
P(r)
(φ(t))
· φ
(t)
2
P(r)
(φ(t))
· φ
(t)
2
∂P(r)
(φ(t))
· φ
(t)
∂r
(δr)
dt,
B =
2π
0
1
P(r)
(φ(t))
· φ
(t)
2
P(r)
(φ(t))
· φ
(t)
∂P(r)
(φ(t))
· φ
(t)
∂r
(δr)
dt.
The first integral is equal to
A =
2π
0
1
P(r)
(φ(t))
2
P(r)
(φ(t))
∂P(r)
(φ(t))
∂r
(δr)
φ
(t)dt.
And, since ϕ, and thus φ, is a positive diffeomorphism, after the change of variable
t
→ φ(t), we get
A = α(P)
r
(δr).
The second integral is given by
B =
2π
0
1
P(r)
(φ(t))
2
P(r)
(φ(t))
∂P(r)
(φ(t))
∂r
(δr)
φ
(t)
φ
(t)
dt
Let us denote for short,
x = P(r),
x
= P(r)
,
and
δx
=
t
→
∂P
(r)(t)
∂r
(δr)
,
such that the last integral writes
B =
2π
0
1
x
(φ(t))
2
x
(φ(t))
| δx
(φ(t))
φ
(t)
φ
(t)
dt.
Let us remind that, for any variation δ
δ
v =
1
v
v | δv ⇒ δ log v =
1
v
δ
v =
1
v
2
v | δv.
So, the integrand in the last expression of B writes,
1
x
(φ(t))
2
x
(φ(t))
| δx
(φ(t))
= δ log x
(φ(t))
.
Thus, the term B becomes
B
=
2π
0
δ log
x
(φ(t))
d log(φ
(t))
=
δ
2π
0
log
x
(φ(t))
d log(φ
(t))
=
δ
2π
0
log
x
(ϕ
−1
(t))
d log((ϕ
−1
)
(t))
68
PATRICK IGLESIAS-ZEMMOUR
Let us make the change of variable s = ϕ
−1
(t), we get,
B
=
+ δ
2π
0
log
x
(s)
d log[(ϕ
−1
)
(ϕ(s))]
=
− δ
2π
0
log
x
(s)
d log(ϕ
(s))
=
−
∂
∂r
2π
0
log
P(r)
(s)
d log(ϕ
(s))
(δr)
=
−
∂
∂r
F(ϕ)(P(r))
(δr)
=
− d[F(ϕ)](P)
r
(δr).
Coming back to α( ¯
ϕ
◦ P)
r
(δr) we get finally,
α( ¯
ϕ
◦ P)
r
(δr) = α(P)
r
(δr)
− d[F(ϕ)](P)
r
(δr)
that is
¯
ϕ
∗
(α) = α
− d[F(ϕ)].
Thus, the exterior differential ω = dα is invariant by the action of Diff
+
(S
1
). And
since the difference ¯
ϕ
∗
(α)
− α is exact, this action is hamiltonian.
The 2-point moment map — Now, let us compute the 2-points moment maps
ψ of the action of Diff
+
(S
1
) on (Imm(S
1
, R
2
), ω). Let p be a path connecting two
immersions x
0
and x
1
. We have Ψ(p) = ˆ
p
∗
(Kω) = ˆ
p
∗
(Kdα) = ˆ
p
∗
(ˆ
1
∗
(α)
− ˆ0
∗
(α)
−
d(Kα)) = ˆ
x
∗
1
(α)
− ˆx
∗
0
(α)
− d(Kα ◦ ˆp). But, for all ϕ ∈ Diff
+
(S
1
),
Kα
◦ ˆp(ϕ) =
¯
ϕ(p)
α =
p
¯
ϕ
∗
(α) =
p
α
−
p
dF(ϕ) =
p
α
− F(ϕ)(x
1
) + F(ϕ)(x
0
).
So, we get finally
Ψ(p) = ψ(x
0
, x
1
) =
{ˆx
∗
1
(α) + d[ϕ
→ F(ϕ)(x
1
)]
} − {ˆx
∗
0
(α) + d[ϕ
→ F(ϕ)(x
0
)]
}.
But notice that, ˆ
x
∗
(α) + d[ϕ
→ F(ϕ)(x) is not a momentum of Diff
+
(S
1
).
The 1-point moment maps — Let us compute the moment map ψ(x
0
, x). Let
m =
{ˆx
∗
(α) + d[ϕ
→ F(ϕ)(x)]}(r → ϕ)
r
(δr).
And, let us denote for short
A
=
ˆ
x
∗
(α)(r
→ ϕ)
r
(δr)
B
=
d[ϕ
→ F(ϕ)(x)](r → ϕ)
r
(δr) =
∂F(ϕ)(x)
∂r
δr.
We shall use the notation m
0
, A
0
and B
0
for the immersion x
0
. Thus,
ψ(x
0
, x)(r
→ ϕ)
r
(δr) = m
− m
0
= A + B
− A
0
− B
0
.
We have, ˆ
x
∗
(α)(r
→ ϕ) = α(ˆx ◦ [r → ϕ]) = α(r → x ◦ ϕ
−1
). Let φ = ϕ
−1
, so
A =
2π
0
1
(x ◦ φ)
(t)
2
(x
◦ φ)
(t)
∂(x
◦ φ)
(t)
∂r
(δr)
.
Let us introduce now,
u = φ(t),
u
= φ(t)
and
u
= φ
(t).
So, the decomposition given by
♥, writes
(x
◦ φ)
(t) = x
(u)
· u
and
(x
◦ φ)
(t) = x
(u)
· u
2
+ x
(u)
· u
.
11. EXAMPLES OF MOMENT MAPS IN DIFFEOLOGY
69
Then, we shall use the prefix δ for every variation associated to δr, that is δ =
D(r
→ )(r)(δr). So,
∂(x
◦ φ)
(t)
∂r
(δr) = δ[x
(u)
· u
] = x
(u)
· δu · u
+ x
(u)
· δu
.
Thus,
A
=
2π
0
1
x
(u)
2
u
2
x
(u)u
2
+ x
(u)u
| x
(u)u
δu + x
(u)δu
dt
=
2π
0
x
(u)
2
x
(u)
2
δu u
dt +
2π
0
x
(u), x
(u)
x
(u)
2
δu
+
u
u
δu
dt +
2π
0
u
u
δu
dt
Now,
B =
∂F(ϕ)(x)
∂r
δr =
−
∂ ¯
F(φ)(x)
∂r
δr =
−δ[¯F(φ)(x)],
with
¯
F(φ)(x) =
2π
0
log
x
(φ(t))
d log φ
(t) =
2π
0
log
x
(u)
d log(u
).
So, after the variation with respect to δr and an integration by part, we get
B
=
−
2π
0
x
(u), x
(u)
x
(u)
2
δu
u
u
dt
−
2π
0
log
x
(u)
δd log(u
)
=
−
2π
0
x
(u), x
(u)
x
(u)
2
δu
u
u
dt +
2π
0
x
(u), x
(u)
x
(u)
2
u
δ log(u
) dt
=
−
2π
0
x
(u), x
(u)
x
(u)
2
δu
u
u
dt +
2π
0
x
(u), x
(u)
x
(u)
2
δu
dt
Therefore, grouping the terms and integrating again by part, we get
A + B
=
2π
0
x
(u)
2
x
(u)
2
δu du + 2
2π
0
x
(u), x
(u)
x
(u)
2
δu
dt +
2π
0
u
u
δu
dt
=
2π
0
x
(u)
2
x
(u)
2
δu du
− 2
2π
0
d
2
du
2
log
x
(u)
δu du +
2π
0
u
u
δu
dt
=
2π
0
x
(u)
2
x
(u)
2
−
d
2
du
2
log
x
(u)
2
δu du +
2π
0
u
u
δu
dt
Now, since
x
0
(t)
= 1 we get the value of the 2-point moment map,
ψ(x
0
, x)(r
→ ϕ)
r
(δr) =
2π
0
x
(u)
2
x
(u)
2
−
d
2
du
2
log
x
(u)
2
δu du
−
2π
0
δu du.
The second term of the right hand side of the equality is a constant momentum
of Diff
+
(S
1
), so it can be avoided. And, every moment map is, up to a constant,
equal to the moment μ announced.
Souriau’s cocycles — Souriau’s cocycle associated to immersion x
0
is defined
by θ(g) = ψ(x
0
, ¯
g(x
0
)), see Subsection 5.2. So, we have to replace, in the expression
of ψ above, x by ¯
g(x
0
) = x
0
◦ g
−1
, that is x = x
0
◦ γ. So, θ(g)(r → ϕ)
r
(δr) =
ψ(x
0
, x
0
◦ γ). So, note first that
(x
0
◦ γ)
(u) = x
0
(γ(u))γ
(u)
and
(x
0
◦ γ)
(u) = x
0
(γ(u))γ
(u)
2
+ x
0
(u)γ
(u).

70
PATRICK IGLESIAS-ZEMMOUR
And, let us remind that
x
0
= x
0
= 1 and x
0
| x
0
= 0. We get,
x
(u)
2
= γ
(u)
2
and
x
(u)
2
= γ
(u)
4
+ γ
(u)
2
.
This gives
x
(u)
2
x
(u)
2
= γ
(u)
2
+
γ
(u)
2
γ
(u)
2
and
d
2
du
2
log
x
(u)
2
= 2
γ
(u)γ
(u)
− γ
(u)
2
γ
(u)
2
.
Thus,
θ(g)(r
→ ϕ)
r
(δr)
=
2π
0
3γ
(u)
2
− 2γ
(u)γ
(u)
γ
(u)
2
δu du
+
2π
0
γ
(u)
2
δu du
−
2π
0
δu du.
But, after a change of variable u
→ v = γ(u), we get
2π
0
γ
(u)
2
δu du =
2π
0
(δuγ
(u)) γ
(u)du =
2π
0
δv dv.
So the two last terms cancel each other, and we get the value announced for
Souriau’s cocycle θ.
Bott’s cocycle — The real function F(g
◦h)−F(g)◦ ¯h −F(h) is constant since X
is connected, and its differential is equal to (¯
g
◦ ¯h)
∗
(α)
− ¯h
∗
(¯
g
∗
(α)), that is 0. Now,
to explicit β(g, g
) = F(g)
◦ ¯g
+ F(g
)
−β(g, g
)
−F(g ◦g
), it is sufficient to compute
the right hand member on the standard immersion x
0
, for which the speed norm is
equal to 1, and thus log
x
(t)
= 0 for all real t. So we get,
β(g, h)
=
F(g)(x
0
◦ h
−1
)
− F(h)(x
0
)
− F(g ◦ h)(x
0
)
=
+
2π
0
log
(x
0
◦ h
−1
)
(t)
d log g
(t)
=
+
2π
0
log(h
−1
)
(t) d log g
(t)
=
−
2π
0
log h
(h
−1
(t)) d log g
(t)
=
−
2π
0
log h
(s) d log g
(h(s))
=
+
2π
0
log(g
◦ h)
(t) d log h
(t)
And this is the standard expression of Bott’s cocycle.
Bibliography
[Ban78]
Augustin Banyaga. Sur la structure du groupe des diff´
eomorphismes qui pr´
eservent
une forme symplectique, Comment. Math. Helv., volume 53, pages 174–227, 1978.
MR490874 (80c:58005)
[Boo69]
William M. Boothby. Transitivity of the automorphisms of certain geometric structures,
Trans. Amer. Math. Soc., volume 137, pages 93–100, 1969. MR0236961 (38:5254)
[Bot78]
Raoul Bott. On some formulas for the characteristic classes of group actions, differen-
tial topology, foliations and Gelfand-Fuchs cohomology. In Proceed. Rio de Janeiro, 1976,
volume 652 of Springer Lectures Notes. Springer Verlag, 1978. MR505649 (80a:57011)
[CDM88] M. Condevaux, P. Dazord and P. Molino. G´
eom´
etrie du moment. Travaux du S´
eminaire
Sud-Rhodanien de G´
eom´
etrie, I, Publ. D´
ep. Math. Nouvelle S´
er. B 88-1, Univ. Claude-
Bernard, pp. 131–160, Lyon, 1988. MR1040871
[Che77]
Kuo Tsai Chen. Iterated path integral, Bull. of Am. Math. Soc., volume 83, number 5,
pages 831 – 879, 1977. MR0454968 (56:13210)
[Dnl99]
Simon K. Donaldson. Moment maps and diffeomorphisms. Asian Journal of Math., vol.
3, pp. 1–16, 1999. MR1701920 (2001a:53122)
[Don84]
Paul Donato. Revˆ
etement et groupe fondamental des espaces diff´
erentiels homog`
enes,
Th`
ese de doctorat d’´
etat, Universit´
e de Provence, Marseille, 1984.
[Don88]
Paul Donato. G´
eom´
etrie des orbites coadjointes des groupes de diff´
eomorphismes. In
Lect. Notes In Maths, vol. 1416, pp. 84–104, 1988. MR1047478 (91g:58093)
[Igl85]
Patrick Iglesias. Fibr´
es diff´
eologiques et homotopie, Th`
ese de doctorat d’´
etat, Universit´
e
de Provence, Marseille, 1985.
http://math.huji.ac.il/
∼piz/documents/These.pdf
[IKZ05]
Patrick Iglesias, Yael Karshon and Moshe Zadka. Orbifolds as diffeologies, 2005.
http://arxiv.org/abs/math.DG/0501093
[IL90]
Patrick Iglesias & Gilles Lachaud. Espaces diff´
erentiables singuliers et corps de nombres
alg´
ebriques. Ann. Inst. Fourier, Grenoble, volume 40, number 1, pages 723 – 737, 1990.
[Igl95]
Patrick Iglesias. La trilogie du moment. Ann. Inst. Fourier, 45, 1995.
[Piz05]
Patrick Iglesias-Zemmour. Diffeology, eprint 2005–07.
http://math.huji.ac.il/
∼piz/diffeology/
[Piz06-a] Patrick Iglesias-Zemmour. Diffeology of the Infinite Hopf Fibration, eprint, 2006.
http://math.huji.ac.il/
∼piz/documents/DIHF.pdf, Banach Center Publ. 76, Polish
Acad. Sci., Warsaw, 2007. MR2346968 (2008k:58020)
[Piz06-b] Patrick Iglesias-Zemmour. Dimension in diffeology, eprint 2006.
http://math.huji.ac.il/
∼piz/documents/DID.pdf, Indag. Math. (N.S.), vol. 18, pages
555–560, 2007. MR2424313
[Piz07-a] Patrick
Iglesias-Zemmour.
Variations
of
integrals
in
diffeology,
eprint
2007.
http://math.huji.ac.il/
∼piz/documents/VOIID.pdf
[Piz07-c] Patrick Iglesias-Zemmour. Every symplectic manifold is a coadjoint orbit eprint 2007.
http://math.huji.ac.il/
∼piz/documents/ESMIACO.pdf
[Kir74]
Alexandre A. Kirillov. Elements de la th´
eorie des repr´
esentations. Editions MIR,
Moscou, 1974. MR0393324 (52:14134)
[Kos70]
Bertram Kostant. Orbits and quantization theory. In Congr`
es international des
math´
ematiciens 1970-1971. MR0425024 (54:12982)
[Omo86] Stephen Malvern Omohundro. Geometric Perturbation Theory in Physics. World Sci-
entific, 1986. MR875622 (88d:58040)
71
72
BIBLIOGRAPHY
[Sou70]
Jean-Marie Souriau. Structure des syst`
emes dynamiques,
Dunod,
Paris,
1970.
[Sou81]
Jean-Marie Souriau. Groupes diff´
erentiels, Lecture notes in mathematics, Springer Ver-
lag, New York, volume 836, pages 91 – 128, 1981. MR607688 (84b:22038)
[Sou84]
Jean-Marie Souriau. Groupes diff´
erentiels de physique math´
ematique, Lecture Notes in
Physics, Springer Verlag, Berlin – Heidelberg, volume 201, pages 511 – 513, 1984.
[Zie96]
Fran¸
cois Ziegler. Th´
eorie de Mackey symplectique,
in M´
ethode des orbites et
repr´
esentations quantiques, Th`
ese de doctorat d’Universit´
e, Universit´
e de Provence,
Marseille, 1996.

Editorial Information
To be published in the Memoirs, a paper must be correct, new, nontrivial, and sig-
nificant.
Further, it must be well written and of interest to a substantial number of
mathematicians. Piecemeal results, such as an inconclusive step toward an unproved ma-
jor theorem or a minor variation on a known result, are in general not acceptable for
publication.
Papers appearing in Memoirs are generally at least 80 and not more than 200 published
pages in length. Papers less than 80 or more than 200 published pages require the approval
of the Managing Editor of the Transactions/Memoirs Editorial Board. Published pages are
the same size as those generated in the style files provided for
AMS-L
A
TEX or A
MS-TEX.
Information on the backlog for this journal can be found on the AMS website starting
from http://www.ams.org/memo.
A Consent to Publish and Copyright Agreement is required before a paper will be
published in the Memoirs. After a paper is accepted for publication, the Providence
office will send a Consent to Publish and Copyright Agreement to all authors of the
paper. By submitting a paper to the Memoirs, authors certify that the results have not
been submitted to nor are they under consideration for publication by another journal,
conference proceedings, or similar publication.
Information for Authors
Memoirs is an author-prepared publication.
Once formatted for print and on-line
publication, articles will be published as is with the addition of AMS-prepared frontmatter
and backmatter. Articles are not copyedited; however, confirmation copy will be sent to
the authors.
Initial submission. The AMS uses Centralized Manuscript Processing for initial sub-
missions. Authors should submit a PDF file using the Initial Manuscript Submission form
found at www.ams.org/submission/memo, or send one copy of the manuscript to the follow-
ing address: Centralized Manuscript Processing, MEMOIRS OF THE AMS, 201 Charles
Street, Providence, RI 02904-2294 USA. If a paper copy is being forwarded to the AMS,
indicate that it is for Memoirs and include the name of the corresponding author, contact
information such as email address or mailing address, and the name of an appropriate
Editor to review the paper (see the list of Editors below).
The paper must contain a descriptive title and an abstract that summarizes the article
in language suitable for workers in the general field (algebra, analysis, etc.). The descrip-
tive title should be short, but informative; useless or vague phrases such as “some remarks
about” or “concerning” should be avoided. The abstract should be at least one com-
plete sentence, and at most 300 words. Included with the footnotes to the paper should
be the 2010 Mathematics Subject Classification representing the primary and secondary
subjects of the article. The classifications are accessible from www.ams.org/msc/. The
Mathematics Subject Classification footnote may be followed by a list of key words and
phrases describing the subject matter of the article and taken from it. Journal abbrevi-
ations used in bibliographies are listed in the latest Mathematical Reviews annual index.
The series abbreviations are also accessible from www.ams.org/msnhtml/serials.pdf. To
help in preparing and verifying references, the AMS offers MR Lookup, a Reference Tool
for Linking, at www.ams.org/mrlookup/.
Electronically prepared manuscripts. The AMS encourages electronically pre-
pared manuscripts, with a strong preference for
AMS-L
A
TEX. To this end, the Society
has prepared
AMS-L
A
TEX author packages for each AMS publication. Author packages
include instructions for preparing electronic manuscripts, samples, and a style file that gen-
erates the particular design specifications of that publication series. Though
AMS-L
A
TEX
is the highly preferred format of TEX, author packages are also available in A
MS-TEX.
Authors may retrieve an author package for Memoirs of the AMS from www.ams.org/
journals/memo/memoauthorpac.html or via FTP to ftp.ams.org (login as anonymous,
enter your complete email address as password, and type cd pub/author-info). The

AMS Author Handbook and the Instruction Manual are available in PDF format from the
author package link. The author package can also be obtained free of charge by sending
email to tech-support@ams.org or from the Publication Division, American Mathematical
Society, 201 Charles St., Providence, RI 02904-2294, USA. When requesting an author
package, please specify
AMS-L
A
TEX or A
MS-TEX and the publication in which your paper
will appear. Please be sure to include your complete mailing address.
After acceptance. The source files for the final version of the electronic manuscript
should be sent to the Providence office immediately after the paper has been accepted for
publication. The author should also submit a PDF of the final version of the paper to the
editor, who will forward a copy to the Providence office.
Accepted electronically prepared files can be submitted via the web at www.ams.org/
submit-book-journal/, sent via FTP, or sent on CD to the Electronic Prepress Depart-
ment, American Mathematical Society, 201 Charles Street, Providence, RI 02904-2294
USA. TEX source files and graphic files can be transferred over the Internet by FTP to
the Internet node ftp.ams.org (130.44.1.100). When sending a manuscript electronically
via CD, please be sure to include a message indicating that the paper is for the Memoirs.
Electronic graphics. Comprehensive instructions on preparing graphics are available
at www.ams.org/authors/journals.html.
A few of the major requirements are given
here.
Submit files for graphics as EPS (Encapsulated PostScript) files. This includes graphics
originated via a graphics application as well as scanned photographs or other computer-
generated images. If this is not possible, TIFF files are acceptable as long as they can be
opened in Adobe Photoshop or Illustrator.
Authors using graphics packages for the creation of electronic art should also avoid the
use of any lines thinner than 0.5 points in width. Many graphics packages allow the user
to specify a “hairline” for a very thin line. Hairlines often look acceptable when proofed
on a typical laser printer. However, when produced on a high-resolution laser imagesetter,
hairlines become nearly invisible and will be lost entirely in the final printing process.
Screens should be set to values between 15% and 85%. Screens which fall outside of this
range are too light or too dark to print correctly. Variations of screens within a graphic
should be no less than 10%.
Inquiries. Any inquiries concerning a paper that has been accepted for publication
should be sent to memo-query@ams.org or directly to the Electronic Prepress Department,
American Mathematical Society, 201 Charles St., Providence, RI 02904-2294 USA.

Editors
This journal is designed particularly for long research papers, normally at least 80 pages in
length, and groups of cognate papers in pure and applied mathematics. Papers intended for
publication in the Memoirs should be addressed to one of the following editors. The AMS uses
Centralized Manuscript Processing for initial submissions to AMS journals. Authors should follow
instructions listed on the Initial Submission page found at www.ams.org/memo/memosubmit.html.
Algebra, to ALEXANDER KLESHCHEV, Department of Mathematics, University of Oregon, Eu-
gene, OR 97403-1222; e-mail: ams@noether.uoregon.edu
Algebraic geometry, to DAN ABRAMOVICH, Department of Mathematics, Brown University,
Box 1917, Providence, RI 02912; e-mail: amsedit@math.brown.edu
Algebraic geometry and its applications, to MINA TEICHER, Emmy Noether Research Insti-
tute for Mathematics, Bar-Ilan University, Ramat-Gan 52900, Israel; e-mail: teicher@macs.biu.ac.il
Algebraic topology, to ALEJANDRO ADEM, Department of Mathematics, University of British
Columbia, Room 121, 1984 Mathematics Road, Vancouver, British Columbia, Canada V6T 1Z2; e-mail:
adem@math.ubc.ca
Combinatorics, to JOHN R. STEMBRIDGE, Department of Mathematics, University of Michigan,
Ann Arbor, Michigan 48109-1109; e-mail: JRS@umich.edu
Commutative and homological algebra, to LUCHEZAR L. AVRAMOV, Department of Math-
ematics, University of Nebraska, Lincoln, NE 68588-0130; e-mail: avramov@math.unl.edu
Complex analysis and harmonic analysis, to ALEXANDER NAGEL, Department of Mathemat-
ics, University of Wisconsin, 480 Lincoln Drive, Madison, WI 53706-1313; e-mail: nagel@math.wisc.edu
Differential geometry and global analysis, to CHRIS WOODWARD, Department of Mathemat-
ics, Rutgers University, 110 Frelinghuysen Road, Piscataway, NJ 08854; e-mail: ctw@math.rutgers.edu
Dynamical systems and ergodic theory and complex analysis, to YUNPING JIANG, Depart-
ment of Mathematics, CUNY Queens College and Graduate Center, 65-30 Kissena Blvd., Flushing, NY
11367; e-mail: Yunping.Jiang@qc.cuny.edu
Functional analysis and operator algebras, to DIMITRI SHLYAKHTENKO, Department of
Mathematics, University of California, Los Angeles, CA 90095; e-mail: shlyakht@math.ucla.edu
Geometric analysis, to WILLIAM P. MINICOZZI II, Department of Mathematics, Johns Hopkins
University, 3400 N. Charles St., Baltimore, MD 21218; e-mail: trans@math.jhu.edu
Geometric topology, to MARK FEIGHN, Math Department, Rutgers University, Newark, NJ
07102; e-mail: feighn@andromeda.rutgers.edu
Harmonic analysis, representation theory, and Lie theory, to E. P. VAN DEN BAN, De-
partment of Mathematics, Utrecht University, P.O. Box 80 010, 3508 TA Utrecht, The Netherlands;
e-mail: E.P.vandenBan@uu.nl
Logic, to STEFFEN LEMPP, Department of Mathematics, University of Wisconsin, 480 Lincoln
Drive, Madison, Wisconsin 53706-1388; e-mail: lempp@math.wisc.edu
Number theory, to JONATHAN ROGAWSKI, Department of Mathematics, University of Califor-
nia, Los Angeles, CA 90095; e-mail: jonr@math.ucla.edu
Number theory, to SHANKAR SEN, Department of Mathematics, 505 Malott Hall, Cornell Uni-
versity, Ithaca, NY 14853; e-mail: ss70@cornell.edu
Partial differential equations, to GUSTAVO PONCE, Department of Mathematics, South Hall,
Room 6607, University of California, Santa Barbara, CA 93106; e-mail: ponce@math.ucsb.edu
Partial differential equations and dynamical systems, to PETER POLACIK, School of Math-
ematics, University of Minnesota, Minneapolis, MN 55455; e-mail: polacik@math.umn.edu
Probability and statistics, to RICHARD BASS, Department of Mathematics, University of Con-
necticut, Storrs, CT 06269-3009; e-mail: bass@math.uconn.edu
Real analysis and partial differential equations, to DANIEL TATARU, Department of Mathe-
matics, University of California, Berkeley, Berkeley, CA 94720; e-mail: tataru@math.berkeley.edu
All other communications to the editors, should be addressed to the Managing Editor, ROBERT
GURALNICK, Department of Mathematics, University of Southern California, Los Angeles, CA 90089-
1113; e-mail: guralnic@math.usc.edu.

Titles in This Series
975 Javier Rib´
on, Topological classification of families of diffeomorphisms without small
divisors, 2010
974 Pascal Lef`
evre, Daniel Li, Herv´
e Queff´
elec, and Luis Rodr´
ıguez-Piazza,
Composition operators on Hardy-Orlicz spaces, 2010
973 Peter O’Sullivan, The generalised Jacobson-Morosov theorem, 2010
972 Patrick Iglesias-Zemmour, The moment maps in diffeology, 2010
971 Mark D. Hamilton, Locally toric manifolds and singular Bohr-Sommerfeld leaves, 2010
970 Klaus Thomsen, C
∗
-algebras of homoclinic and heteroclinic structure in expansive
dynamics, 2010
969 Makoto Sakai, Small modifications of quadrature domains, 2010
968 L. Nguyen Van Th´
e, Structural Ramsey theory of metric spaces and topological
dynamics of isometry groups, 2010
967 Zeng Lian and Kening Lu, Lyapunov exponents and invariant manifolds for random
dynamical systems in a Banach space, 2010
966 H. G. Dales, A. T.-M. Lau, and D. Strauss, Banach algebras on semigroups and on
their compactifications, 2010
965 Michael Lacey and Xiaochun Li, On a conjecture of E. M. Stein on the Hilbert
transform on vector fields, 2010
964 Gelu Popescu, Operator theory on noncommutative domains, 2010
963 Huaxin Lin, Approximate homotopy of homomorphisms from C(X) into a simple
C
∗
-algebra, 2010
962 Adam Coffman, Unfolding CR singularities, 2010
961 Marco Bramanti, Luca Brandolini, Ermanno Lanconelli, and Francesco
Uguzzoni, Non-divergence equations structured on H¨
ormander vector fields: Heat kernels
and Harnack inequalities, 2010
960 Olivier Alvarez and Martino Bardi, Ergodicity, stabilization, and singular
perturbations for Bellman-Isaacs equations, 2010
959 Alvaro Pelayo, Symplectic actions of 2-tori on 4-manifolds, 2010
958 Mark Behrens and Tyler Lawson, Topological automorphic forms, 2010
957 Ping-Shun Chan, Invariant representations of GSp(2) under tensor product with a
quadratic character, 2010
956 Richard Montgomery and Michail Zhitomirskii, Points and curves in the Monster
tower, 2010
955 Martin R. Bridson and Daniel Groves, The quadratic isoperimetric inequality for
mapping tori of free group automorphisms, 2010
954 Volker Mayer and Mariusz Urba´
nski, Thermodynamical formalism and multifractal
analysis for meromorphic functions of finite order, 2010
953 Marius Junge and Javier Parcet, Mixed-norm inequalities and operator space L
p
embedding theory, 2010
952 Martin W. Liebeck, Cheryl E. Praeger, and Jan Saxl, Regular subgroups of
primitive permutation groups, 2010
951 Pierre Magal and Shigui Ruan, Center manifolds for semilinear equations with
non-dense domain and applications to Hopf bifurcation in age structured models, 2009
950 C´
edric Villani, Hypocoercivity, 2009
949 Drew Armstrong, Generalized noncrossing partitions and combinatorics of Coxeter
groups, 2009
948 Nan-Kuo Ho and Chiu-Chu Melissa Liu, Yang-Mills connections on orientable and
nonorientable surfaces, 2009
947 W. Turner, Rock blocks, 2009
946 Jay Jorgenson and Serge Lang, Heat Eisenstein series on SL
n
(C), 2009
945 Tobias H. J¨
ager, The creation of strange non-chaotic attractors in non-smooth
saddle-node bifurcations, 2009
TITLES IN THIS SERIES
944 Yuri Kifer, Large deviations and adiabatic transitions for dynamical systems and Markov
processes in fully coupled averaging, 2009
943 Istv´
an Berkes and Michel Weber, On the convergence of
c
k
f (n
k
x), 2009
942 Dirk Kussin, Noncommutative curves of genus zero: Related to finite dimensional
algebras, 2009
941 Gelu Popescu, Unitary invariants in multivariable operator theory, 2009
940 G´
erard Iooss and Pavel I. Plotnikov, Small divisor problem in the theory of
three-dimensional water gravity waves, 2009
939 I. D. Suprunenko, The minimal polynomials of unipotent elements in irreducible
representations of the classical groups in odd characteristic, 2009
938 Antonino Morassi and Edi Rosset, Uniqueness and stability in determining a rigid
inclusion in an elastic body, 2009
937 Skip Garibaldi, Cohomological invariants: Exceptional groups and spin groups, 2009
936 Andr´
e Martinez and Vania Sordoni, Twisted pseudodifferential calculus and
application to the quantum evolution of molecules, 2009
935 Mihai Ciucu, The scaling limit of the correlation of holes on the triangular lattice with
periodic boundary conditions, 2009
934 Arjen Doelman, Bj¨
orn Sandstede, Arnd Scheel, and Guido Schneider, The
dynamics of modulated wave trains, 2009
933 Luchezar Stoyanov, Scattering resonances for several small convex bodies and the
Lax-Phillips conjuecture, 2009
932 Jun Kigami, Volume doubling measures and heat kernel estimates of self-similar sets,
2009
931 Robert C. Dalang and Marta Sanz-Sol´
e, H¨
older-Sobolv regularity of the solution to
the stochastic wave equation in dimension three, 2009
930 Volkmar Liebscher, Random sets and invariants for (type II) continuous tensor product
systems of Hilbert spaces, 2009
929 Richard F. Bass, Xia Chen, and Jay Rosen, Moderate deviations for the range of
planar random walks, 2009
928 Ulrich Bunke, Index theory, eta forms, and Deligne cohomology, 2009
927 N. Chernov and D. Dolgopyat, Brownian Brownian motion-I, 2009
926 Riccardo Benedetti and Francesco Bonsante, Canonical wick rotations in
3-dimensional gravity, 2009
925 Sergey Zelik and Alexander Mielke, Multi-pulse evolution and space-time chaos in
dissipative systems, 2009
924 Pierre-Emmanuel Caprace, “Abstract” homomorphisms of split Kac-Moody groups,
2009
923 Michael J¨
ollenbeck and Volkmar Welker, Minimal resolutions via algebraic discrete
Morse theory, 2009
922 Ph. Barbe and W. P. McCormick, Asymptotic expansions for infinite weighted
convolutions of heavy tail distributions and applications, 2009
921 Thomas Lehmkuhl, Compactification of the Drinfeld modular surfaces, 2009
920 Georgia Benkart, Thomas Gregory, and Alexander Premet, The recognition
theorem for graded Lie algebras in prime characteristic, 2009
919 Roelof W. Bruggeman and Roberto J. Miatello, Sum formula for SL
2
over a totally
real number field, 2009
918 Jonathan Brundan and Alexander Kleshchev, Representations of shifted Yangians
and finite W -algebras, 2008
For a complete list of titles in this series, visit the
AMS Bookstore at www.ams.org/bookstore/.
ISBN 978-0-8218-4709-1
9 780821 847091
MEMO/207/972
Document Outline
- Introduction
- Chapter 1. Few words about diffeology
- Chapter 2. Diffeological groups and momenta
- Chapter 3. The paths moment map
- Chapter 4. The 2-points moment map
- Chapter 5. The moment maps
- Chapter 6. The moment maps for exact 2-forms
- Chapter 7. Functoriality of the moment maps
- Chapter 8. The universal moment maps
- Chapter 9. About symplectic manifolds
- Chapter 10. The homogeneous case
- Chapter 11. Examples of moment maps in diffeology
- Bibliography
Wyszukiwarka
Podobne podstrony:
Hamilton M D Locally toric manifolds and singular Bohr Sommerfeld leaves (MEMO0971, AMS, 2010)(ISBN
Pelayo A Symplectic actions of 2 tori on 4 manifolds (MEMO0959, AMS, 2010)(ISBN 9780821847138)(96s)
Inci H , Kappeler T , Topalov P On the regularity of the composition of diffeomorphisms (MEMO1062, A
Diacu F Relative equilibria in the 3 dimensional curved n body problem (MEMO1071, AMS, 2014)(ISBN 97
Morassi A , Rosset E Uniqueness and stability in determining a rigid inclusion in an elastic body (M
Chang S Y A Non linear elliptic equations in conformal geometry (EMS, 2004)(ISBN 303719006X)(O)(100s
Iwaniec T , Onninen J n harmonic mappings between annuli the art of integrating free Lagrangians (M
Semrl P The optimal version of Hua s fundamental theorem of geometry of rectangular matrices (MEMO10
Stuck In The Moment
Stuck In The Moment (Tłumaczenie PL)
Kim Dare In the Heat of the Moment (pdf)
the moments in between
The?uses of the Showa Restoration in Japan
The?y I ran in the marathon
The Solidarity movement in Poland
Adolescence in the unhappiest time in most people lives
Encyclopedia Biblica Vol 2 04 Maps In volume II
American Polonia and the School Strike in Wrzesnia
ROLE OF THE COOPERATIVE BANK IN EU FUNDS
więcej podobnych podstron