2013-10-10
1
II. Druga dynamiki Newtona – stała masa
i
i
F
m a
= ⋅
∑
Przykład. Wyznaczy
ć
sił
ę
naci
ą
gu liny T oraz
przyspieszenie układu. Zakładamy brak sił oporu.
,
,
,
;
;
x i
x
y i
y
z i
z
i
i
i
F
m a
F
m a
F
m a
= ⋅
= ⋅
= ⋅
∑
∑
∑
Rzut pionowy do góry
0
v
mg
−
g
m
mg
a
−
=
−
=
gt
v
v
−
=
0
2
2
0
gt
t
v
h
−
=
Czas wznoszenia
Ciało b
ę
dzie si
ę
wznosi
ć
a
ż
pr
ę
dko
ść
nie osi
ą
gnie warto
ś
ci równej zeru
g
v
t
gt
v
w
w
0
0
0
=
⇒
−
=
Maksymalna wysoko
ść
na jak
ą
wzniesie si
ę
ciało
g
v
g
v
g
g
v
v
gt
t
v
h
w
w
2
2
2
2
0
2
0
0
0
2
0
max
=
−
=
−
=
Ruch zmienny prostoliniowy - przyspieszenie
2
Spadek swobodny
y
g
0
0
=
v
0
t
v
v
gt
gt
= + =
Przebyta droga
2
2
gt
h
=
Je
ż
eli ciało spadało z wysoko
ś
ci H, to czas jego lotu
g
h
t
2
=
Pr
ę
dko
ść
ko
ń
cowa
gh
v
k
2
=
3

2013-10-10
2
Rzut ukośny
4
)
sin(
)
cos(
0
0
0
0
θ
θ
v
v
v
v
y
x
=
=
0
2
0
2
x
y
y
oy
x
v t
t
y
v t
g
v
v
gt
=
=
−
=
−
Czas lotu
0
0
0
1/ 2
1/ 2
2
2
sin( )
0
2
y
y
v
v
v
gt
t
t
g
g
θ
=
−
⇒
=
=
=
Zasięg
2
0
0
0
0
2
sin( )
sin(2 )
cos( )
x
v
v
R
v t
v
g
g
θ
θ
θ
=
=
⋅
=
Rzut ukośny
5
)
sin(
)
cos(
0
0
0
0
θ
θ
v
v
v
v
y
x
=
=
2
2
0
0
t
g
t
v
y
t
v
x
y
x
−
=
=
Rzut ukośny - równanie toru
x
v
x
t
0
=
( )
2
2
2
0
2
0
0
0
cos
2
2
x
v
g
xtg
v
x
g
v
x
v
y
x
x
y
θ
θ
−
=
−
=
Zasięg
( )
2
2
0
0
0
2
cos
g
y
R tg
R
v
θ
θ
=
⇒
−
=
( )
( )
2
2
2
0
0
2
cos
sin 2
sin
cos
v
v
R
g
g
θ
θ
θ
θ
=
⋅
=
6

2013-10-10
3
Siła tarcia
,max
s
s
f
N
µ
=
Maksymalna warto
ść
siły
tarcia
statycznego
7
R
N
Siła tarcia
Warto
ść
siły tarcia
kinetycznego
k
k
f
N
µ
=
N - warto
ść
siły normalnej
( siły prostopadłej do powierzchni)
k
k
f
N
µ
=
8
9

2013-10-10
4
N
F
T
)
θ
θ
cos
0
cos
1
mg
N
mg
N
F
y
=
⇒
=
−
=
∑
cos
k
T
mg
µ
θ
=
)
2
sin
x
F
F
mg
T
ma
θ
= −
− =
∑
sin
cos
k
F
mg
mg
a
m
θ µ
θ
−
−
=
Przykład 2.
10
a
b)
1
1
2
0
m g
T
T
Nf
N
m a
F
N
m a
− =
=
=
− =

2013-10-10
5
Opis ruchu na płaszczy
ź
nie i przestrzeni
ˆ
ˆ
ˆ
3
2
5
r
i
j
k
= − +
+
ˆ
ˆ
ˆ
r
xi
yj
zk
= + +
14
Wektor położenia
Przemieszczenie
2
1
r
r
r
∆ = −
15
2013-10-10
6
Ruch punktu materialnego na płaszczyźnie
Wektor prędkości średniej
sr
r
v
t
∆
=
∆
sr
x i
y j
x
y
v
i
j
t
t
t
∆ ⋅ + ∆ ⋅
∆
∆
=
=
+
∆
∆
∆
,
,
sr
sr x
sr y
v
v
i
v
j
=
+
16
( )
(
)
1
2
(5 )
5
(12 )
4.8
R
m i
m j
R
m i
m j
=
+
=
+
x
y
(
) (
)
12 5
4.8 5
2
2
3.5 /
0.1 /
sr
sr
R
v
i
j
t
v
m s i
m s j
∆
−
−
=
=
+
∆
=
−
1
R
2
R
R
∆
•
Wektor prędkości średniej
•
Wartość średniej szybkości
s
v
t
∆
=
∆
Długość przebytej drogi w czasie
∆
t
17
2
.
Prędkość chwilowa
0
0
( )
lim
lim
t
t
r
x
y
v t
i
j
t
t
t
∆ →
∆ →
∆
∆
∆
=
=
+
∆
∆
∆
x
y
v
v i
v j
=
+
0
0
( )
lim
lim
t
t
x
y
v t
i
j
t
t
∆ →
∆ →
∆
∆
=
+
∆
∆
0
0
( )
lim
lim
t
t
x
y
v t
i
j
t
t
∆ →
∆ →
∆
∆
=
+
∆
∆
18
( )
d x
d y
v t
i
j
d t
d t
=
+
r
x i
y j
∆ = ∆ ⋅ + ∆ ⋅
2013-10-10
7
x
y
v
v i
v j
=
+
Prędkość chwilowa jest zawsze
styczna do toru
19
sr
v
a
t
∆
=
∆
1.
Przyspieszenie średnie
Przyspieszenie
20
sr
a
Przyspieszenie
2. Przyspieszenie chwilowe
0
0
lim
lim
y
x
t
t
v
v
v
a
i
j
t
t
t
∆ →
∆ →
∆
∆
∆
=
=
+
∆
∆
∆
x
y
a
a i
a j
=
+
0
0
0
lim
lim
lim
y
x
t
t
t
v
v
v
a
i
j
t
t
t
∆ →
∆ →
∆ →
∆
∆
∆
=
=
+
∆
∆
∆
21
0
lim
y
x
t
dv
dv
v
a
i
j
t
dt
dt
∆ →
∆
=
=
+
∆
2013-10-10
8
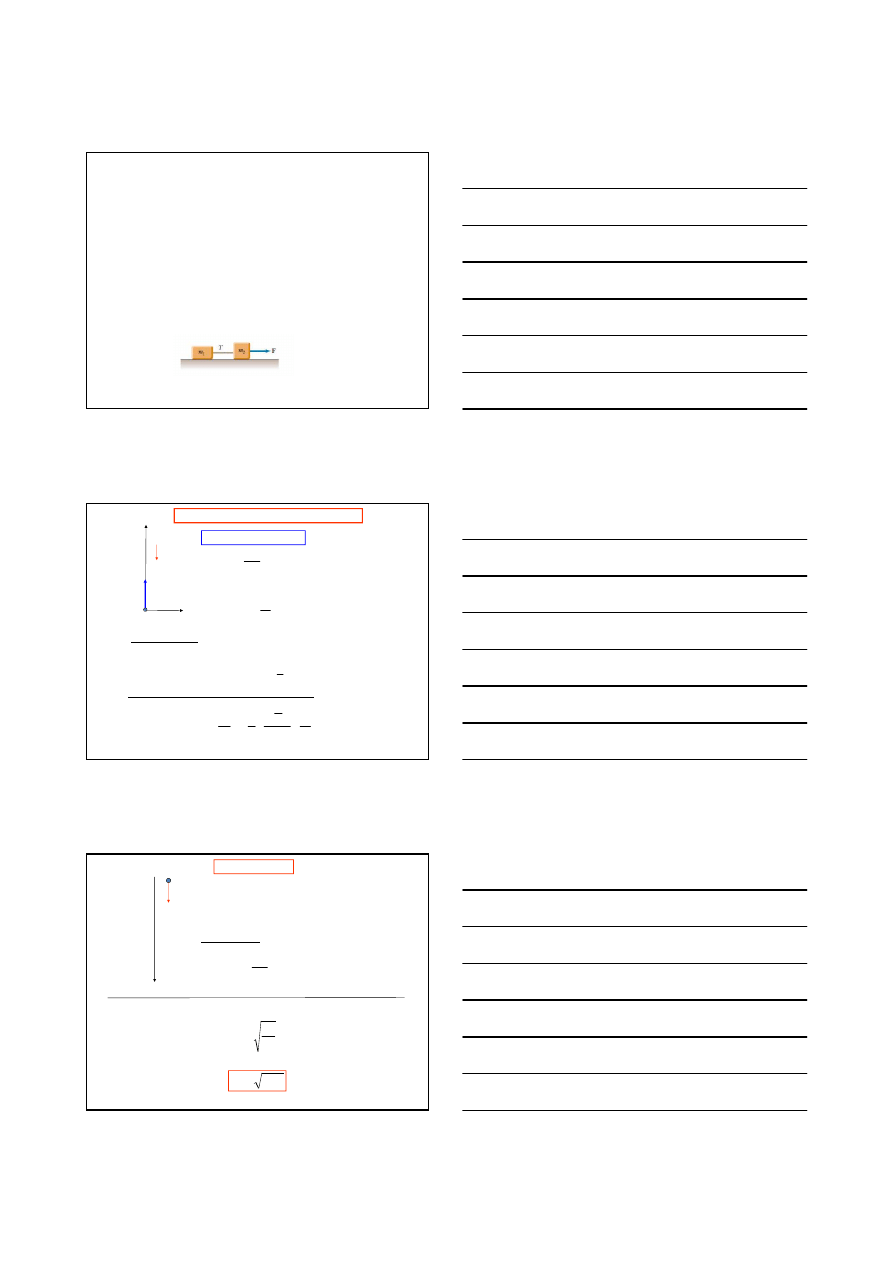
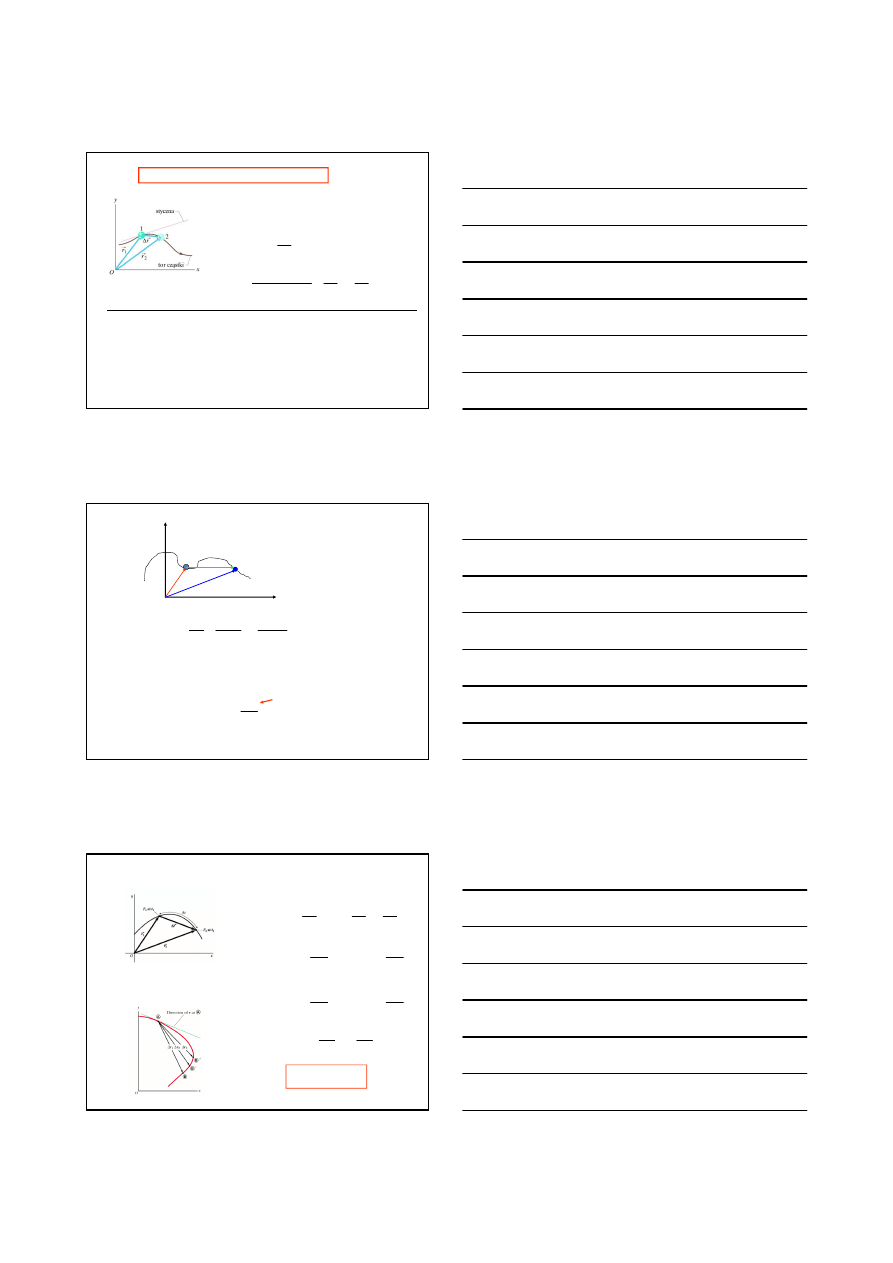
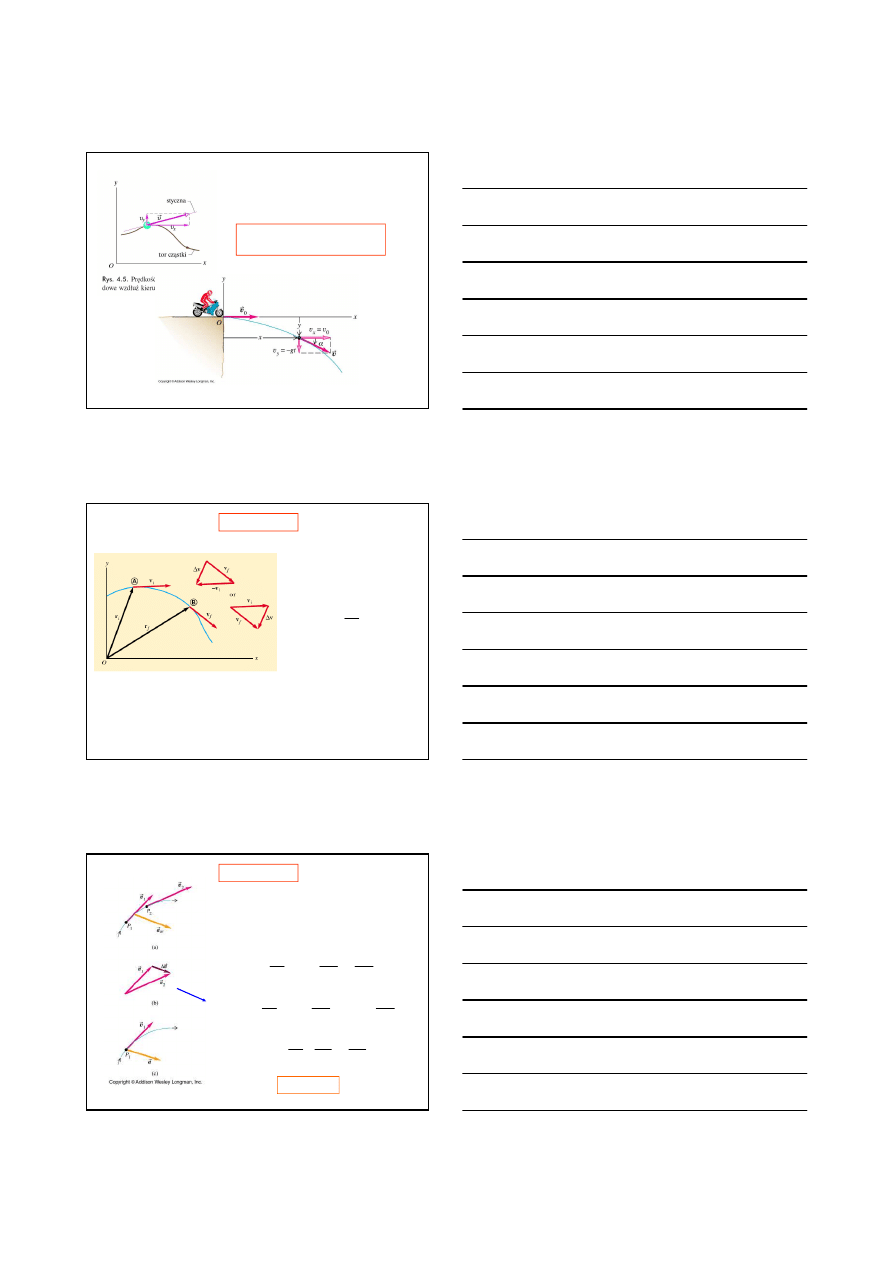
Układy nieinercjalne
22
Przyspieszenie do
ś
rodkowe
2
2
ˆ
d
d
v
a
r
r
v
a
r
= − ⋅
=
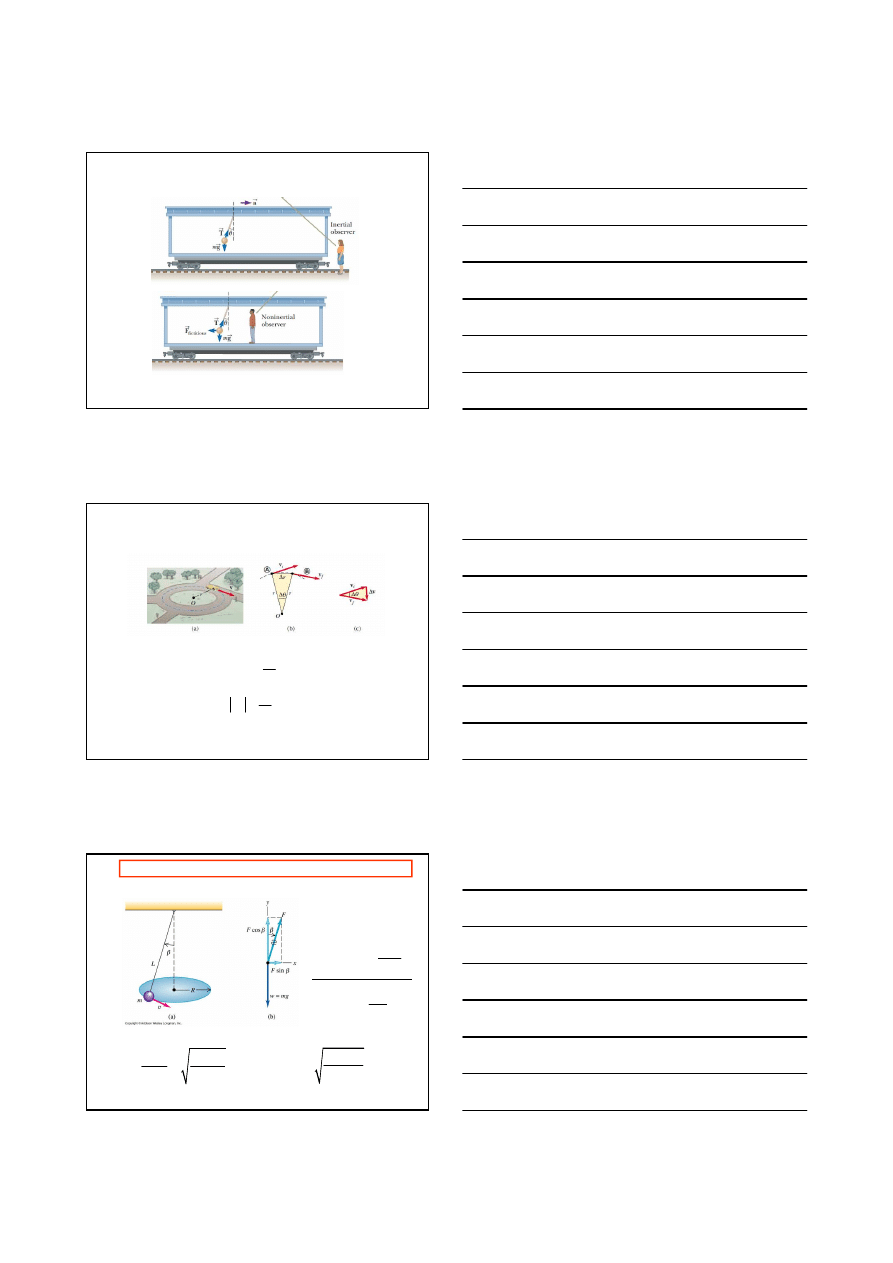
Układy nieinercjalne
cos
β
=
F
mg
2
sin
β
=
mv
F
R
Wyznaczy
ć
warto
ść
okresu obiegu. Z punktu widzenia
obserwatora
w inercjalnym
układzie odniesienia
2
π
β
=
=
⋅
R
R
T
v
r tg
2
tan
β
=
v
Rg
⇔
cos
2
β
π
=
L
T
g
24
F – siła naci
ą
gu liny

2013-10-10
9
Układy nieinercjalne
cos
β
=
F
mg
2
sin
β
=
mv
F
R
Wyznaczy
ć
warto
ść
okresu obiegu. Z punktu widzenia
obserwatora
w nieinercjalnym
układzie odniesienia
2
π
β
=
=
⋅
R
R
T
v
r tg
2
tan
β
=
v
Rg
⇔
cos
2
β
π
=
L
T
g
25
F – siła naci
ą
gu liny
Wyszukiwarka
Podobne podstrony:
03 wyklad elektryczny nid 4625 Nieznany
03 wyklad elektryczny nid 4625 Nieznany
wykład 1 (06 03 2013) elektroterapia wprowadzenie
wykład 3 (20 03 2013) Elektrodiagnostyka c d
ELEKTRA, Politechnika, Sprawozdania, projekty, wyklady, Elektrotechnika
Elektrostatyka 5kolo, elektra, elektrotechnika gajusz, elektrotechnika gajusz, Wykłady z elektry
Elektrodynamika cd4 kolo, elektra, elektrotechnika gajusz, elektrotechnika gajusz, Wykłady z elektry
Elektrodynamika cd4, elektra, elektrotechnika gajusz, elektrotechnika gajusz, Wykłady z elektry
Napiecie przemienne sinusoidalne cd4, elektra, elektrotechnika gajusz, elektrotechnika gajusz, Wykła
A-03 Komparator, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Pod
020507-elektrotechnika-wykład, Elektrotechnika, 2sem
020409-elektrotechnika-wykład, Elektrotechnika, 2sem
020305-elektrotechnika-wykład, Elektrotechnika, 2sem
020219-elektrotechnika-wykład, Elektrotechnika, 2sem
020430-elektrotechnika-wykład, Elektrotechnika, 2sem
020226-elektrotechnika-wykład, Elektrotechnika, 2sem
020416-elektrotechnika-wykład, Elektrotechnika, 2sem
Przykłady rachunkowe do wykładu, Elektrotechnika, Metrologia, laboratorium, instrukcje
więcej podobnych podstron