1
Syllabus
Wprowadzenie
Poprawność algorytmów (analiza algorytmów)
Sortowanie
Elementarne struktury danych
Wyszukiwanie
Zaawansowane struktury danych
Programowanie dynamiczne
2
Literatura
T. Cormen, Ch. Lieserson, R. Rivest, Wprowadzenie do Algorytmów, WNT, 1997
R. Sedgewick, Algorytmy w C++, RM, 1999
N. Wirth, Algorytmy + struktury danych = programy, WNT, 2001
3
O co w tym wszystkim chodzi?
Rozwiązywanie problemów:
– Układanie planu zajęć
– Balansowanie własnego budżet
– Symulacja lotu samolotem
– Prognoza pogody
Dla rozwiązania problemów potrzebujemy procedur, recept, przepisów –
inaczej mówiąc
algorytmów
4
Historia
Nazwa pochodzi od perskiego matematyka Muhammeda ibn Musa
Alchwarizmiego (w łacińskiej wersji Algorismus) – IX w n.e.
Pierwszy dobrze opisany algorytm – algorytm Euklidesa znajdowania
największego wspólnego podzielnika, 400-300 p.n.e.
XIX w. – Charles Babbage, Ada Lovelace.
XX w. – Alan Turing, Alonzo Church, John von Neumann
5
Struktury danych i algorytmy
Algorytm – metoda, zestaw działań (instrukcji) potrzebnych do
rozwiązania problemu
Program – implementacja algorytmu w jakimś języku programowania
Struktura danych – organizacja danych niezbędna dla rozwiązania
problemu (metody dostępu etc.)
6
Ogólne spojrzenie
Cele algorytmiczne:
- poprawność,
- efektywność,
Cele implementacji:
- zwięzłość
- możliwość powtórnego
wykorzystania
Wykorzystanie komputera:
Projektowanie programów (algorytmy, struktury danych)
Pisanie programów (kodowanie)
Weryfikacja programów (testowanie)
7
Problemy algorytmiczne
Ilość instancji danych spełniających
specyfikację wejścia może być nieskończona, np.:
posortowana niemalejąco sekwencja liczb naturalnych, o skończonej długości:
1, 20, 908, 909, 100000, 1000000000.
3, 44, 211, 222, 433.
3.
…
Specyfikacja
wejścia
?
Specyfikacja
wyjścia, jako
funkcji
wejścia
8
Rozwiązanie problemu
– Algorytm opisuje działania, które mają zostać przeprowadzone na danych
– Może istnieć wiele algorytmów rozwiązujących ten sam problem
Instancja
wejściowa (dane),
odpowiadająca
specyfikacji
algorytm
Wyniki
odpowiadające
danym
wejściowym
9
Definicja algorytmu
Algorytmem nazywamy skończoną sekwencję jednoznacznych
instrukcji pozwalających na rozwiązanie problemu, tj. na
uzyskanie pożądanego wyjścia dla każdego legalnego wejścia.
Własności algorytmów:
– określoność
– skończoność
– poprawność
– ogólność
– dokładność
10
Przykład 1: poszukiwanie
Wejście:
• uporządkowany niemalejąco ciąg n
(n >0) liczb
• liczba
a
1
, a
2
, a
3
,….,a
n
; q
j
Wyjście:
• indeks (pozycja)
odnalezionej wartości lub
NIL
2 5 4 10 11; 5
2
2 5 4 10 11; 9
NIL
11
Przykład 1: poszukiwanie liniowe
INPUT: A[1..n] – tablica liczb, q – liczba całkowita.
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
j←
←
←
←
1
while
j ≤
≤
≤
≤ n and A[j] ≠
≠
≠
≠
q
do
j++
if
j ≤
≤
≤
≤ n then return j
else return NIL
INPUT: A[1..n] – tablica liczb, q – liczba całkowita.
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
j←
←
←
←
1
while
j ≤
≤
≤
≤ n and A[j] ≠
≠
≠
≠
q
do
j++
if
j ≤
≤
≤
≤ n then return j
else return NIL
Algorytm wykorzystuje metodę siłową (
brute-force)
– przegląda kolejno
elementy tablicy.
Kod napisany jest w jednoznacznym
pseudojęzyku (pseudokodzie)
.
Wejście (INPUT) i wyjście (OUTPUT) zostały jasno określone.
12
Pseudokod
Zbliżony do Ady, C, Javy czy innego języka programowania:
– struktury sterujące (
if … then … else, pętle while i for)
– przypisanie (←)
– dostęp do elementów tablicy: A[i]
– dla typów złożonych (record lub object) dostęp do pól: A.b
– zmienna reprezentująca tablicę czy obiekt jest traktowana jak wskaźnik do
tej struktury (podobnie, jak w C).
13
Warunki początkowe i końcowe (precondition, postcondition)
Ważne jest sprecyzowanie warunków początkowego i końcowego dla
algorytmu:
– INPUT
: określenie jakie dane algorytm powinien dostać na wejściu
– OUTPUT
: określenie co algorytm powinien wyprodukować. Powinna zostać
przewidziana obsługa specjalnych przypadków danych wejściowych
14
Sort
Przykład 2: sortowanie
Wejście
ciąg n liczb
a
1
, a
2
, a
3
,….,a
n
b
1
,b
2
,b
3
,….,b
n
Wyjście
Permutacja wejściowego
ciągu
2 5 4 10 7
2 4
5 7 10
poprawność wyjścia:
Dla każdego wejścia algorytm po zakończeniu działania
powinien dać jako wynik b
1
, b
2
, …, b
n
takie, że:
• b
1
< b
2
< b
3
< …. < b
n
• b
1
, b
2
, b
3
, …., b
n
jest permutacją a
1
, a
2
, a
3
,….,a
n
poprawność wyjścia:
Dla każdego wejścia algorytm po zakończeniu działania
powinien dać jako wynik
b
1
, b
2
, …, b
n
takie, że:
•
b
1
<
b
2
<
b
3
< …. <
b
n
•
b
1
, b
2
, b
3
, …., b
n
jest permutacją
a
1
, a
2
, a
3
,….,a
n
15
Sortowanie przez wstawianie (Insertion Sort)
A
1
n
j
3
6
8
4
9
7
2
5 1
i
Strategia
• zaczynamy od “pustej ręki”
• wkładamy kartę we właściwe
miejsce kart poprzednio już
posortowane
• kontynuujemy takie postępowanie
aż wszystkie karty zostaną
wstawione
Strategia
• zaczynamy od “pustej ręki”
• wkładamy kartę we właściwe
miejsce kart poprzednio już
posortowane
• kontynuujemy takie postępowanie
aż wszystkie karty zostaną
wstawione
INPUT: A[1..n] – tablica liczb całkowitych
OUTPUT: permutacja A taka, że A[1]≤
A[2]≤ …≤A[n]
for j←2 to n
do key←A[j]
wstaw A[j] do posortowanej
sekwencji A[1..j-1]
i←j-1
while i>0 and A[i]>key
do A[i+1]←A[i]
i--
A[i+1]←key
INPUT: A[1..n] – tablica liczb całkowitych
OUTPUT: permutacja A taka, że A[1]≤
A[2]≤ …≤A[n]
for j←2 to n
do key←A[j]
wstaw A[j] do posortowanej
sekwencji A[1..j-1]
i←j-1
while i>0 and A[i]>key
do A[i+1]←A[i]
i--
A[i+1]←key
16
Analiza algorytmów
Efektywność:
– Czas działania
– Wykorzystanie pamięci
Efektywność jako funkcja rozmiaru wejścia:
– Ilość danych wejściowych (liczb, punktów, itp.)
– Ilość bitów w danych wejściowych
17
Analiza sortowania przez wstawianie
for j←2 to n
do key←A[j]
wstaw A[j] do posortowanej
sekwencji A[1..j-1]
i←j-1
while i>0 and A[i]>key
do A[i+1]←A[i]
i--
A[i+1]:=key
czas
c
1
c
2
0
c
3
c
4
c
5
c
6
c
7
ile razy
n
n-1
n-1
n-1
n-1
2
n
j
j
t
=
∑
2
(
1)
n
j
j
t
=
−
∑
2
(
1)
n
j
j
t
=
−
∑
Określany czas wykonania jako funkcję rozmiaru wejścia
18
Przypadki: najlepszy/najgorszy/średni
Najlepszy przypadek: elementy już są posortowane →
→
→
→
t
j
=1, czas wykonania
liniowy (Cn).
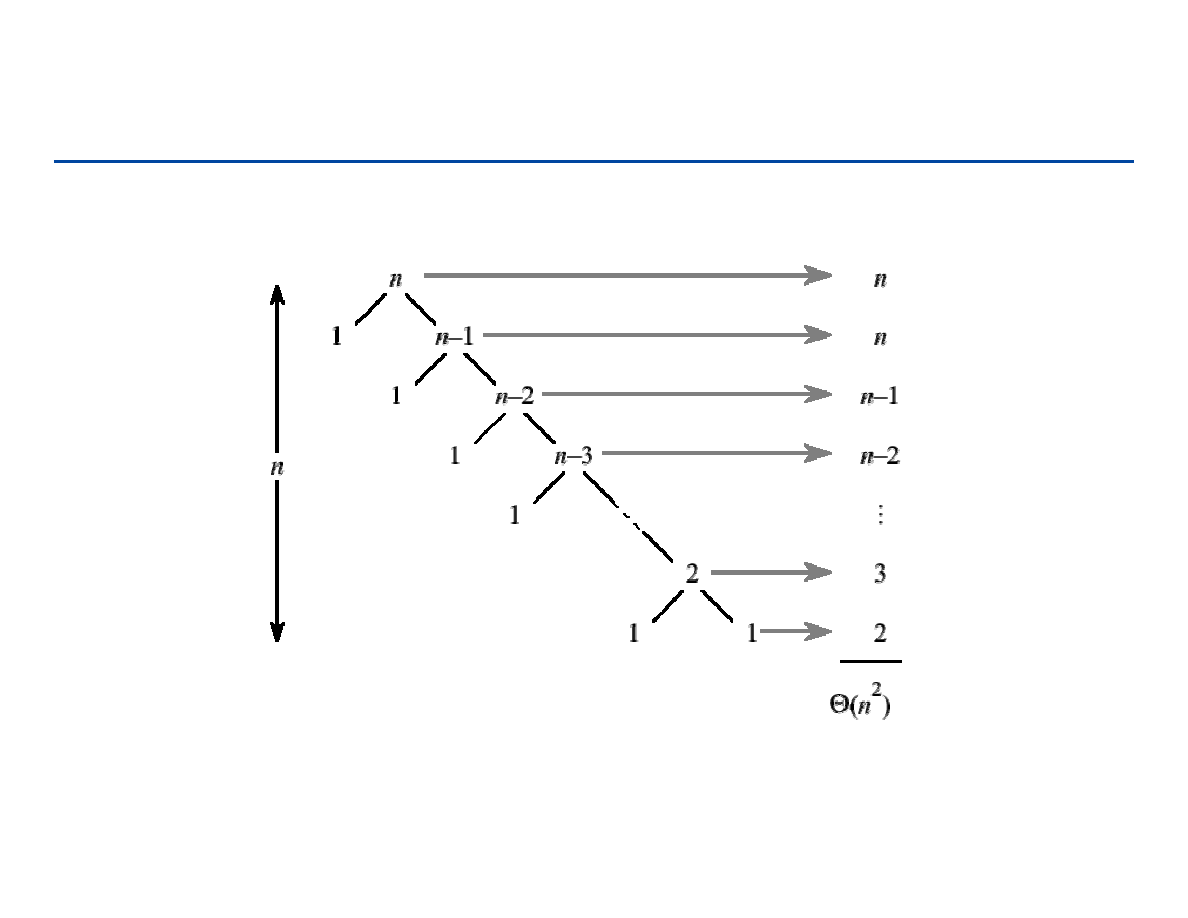
Najgorszy przypadek: elementy posortowane nierosnąco (odwrotnie
posortowane) →
→
→
→
t
j
=j, czas wykonania kwadratowy (Cn
2
)
Przypadek „średni” : t
j
=j/2, czas wykonania kwadratowy (Cn
2
)
19
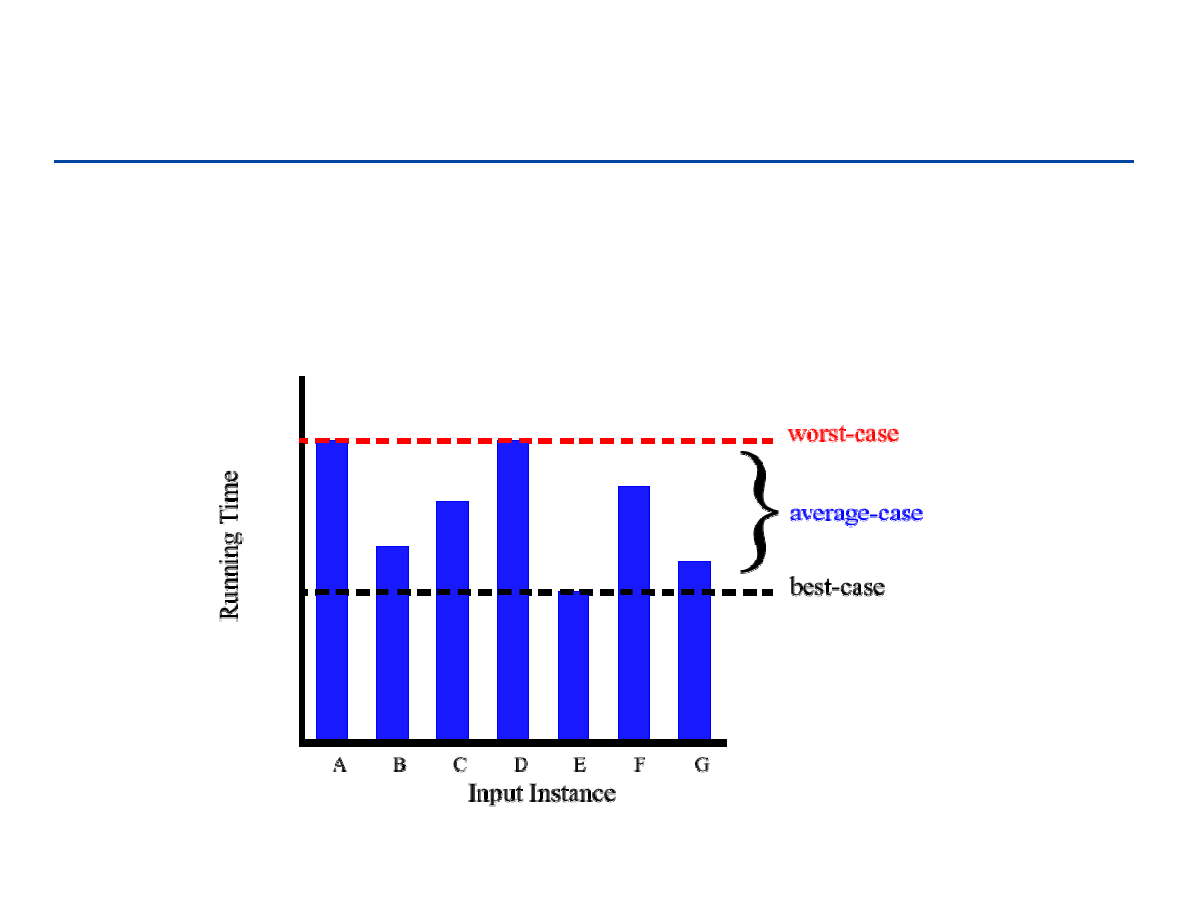
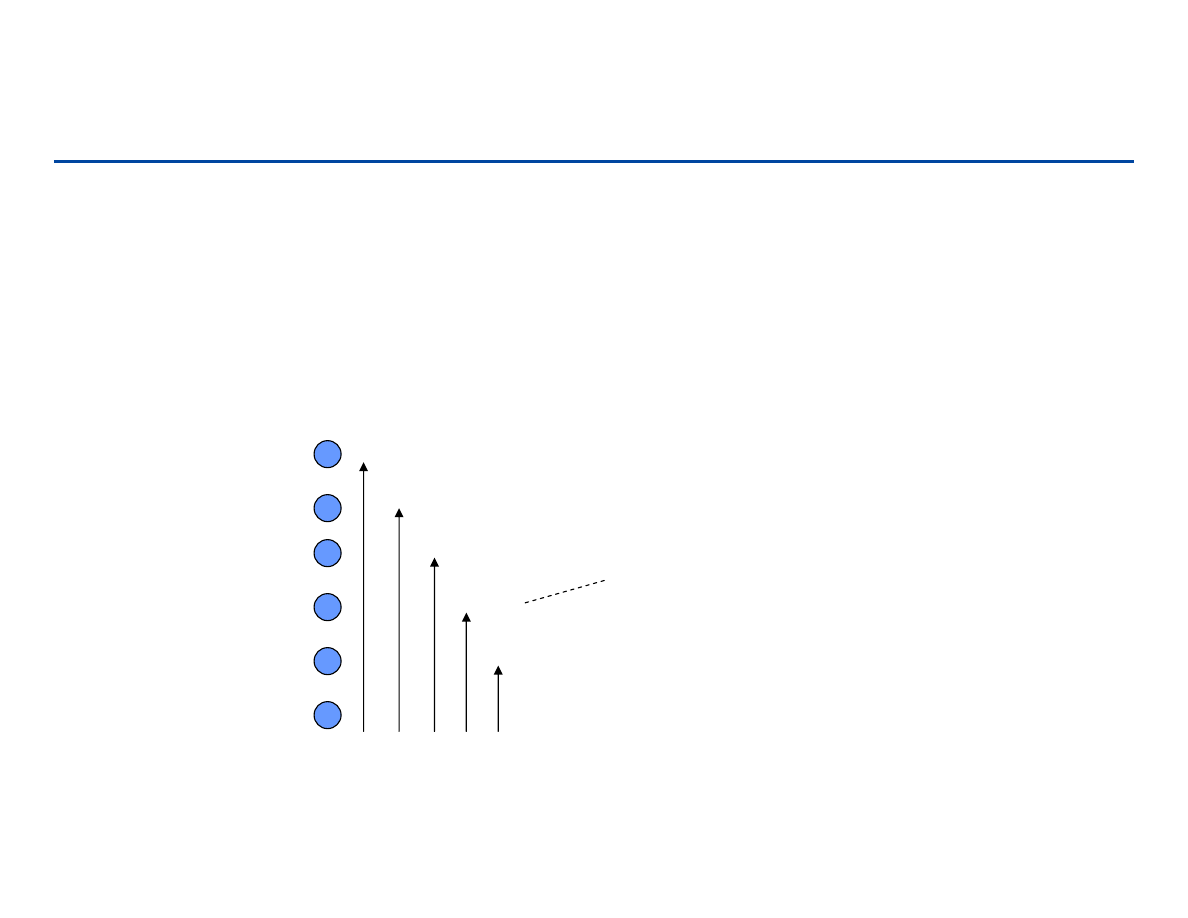
Przypadki: najlepszy/najgorszy/średni
– Dla ustalonego n czas wykonania dla poszczególnych instancji:
1n
2n
3n
4n
5n
6n
20
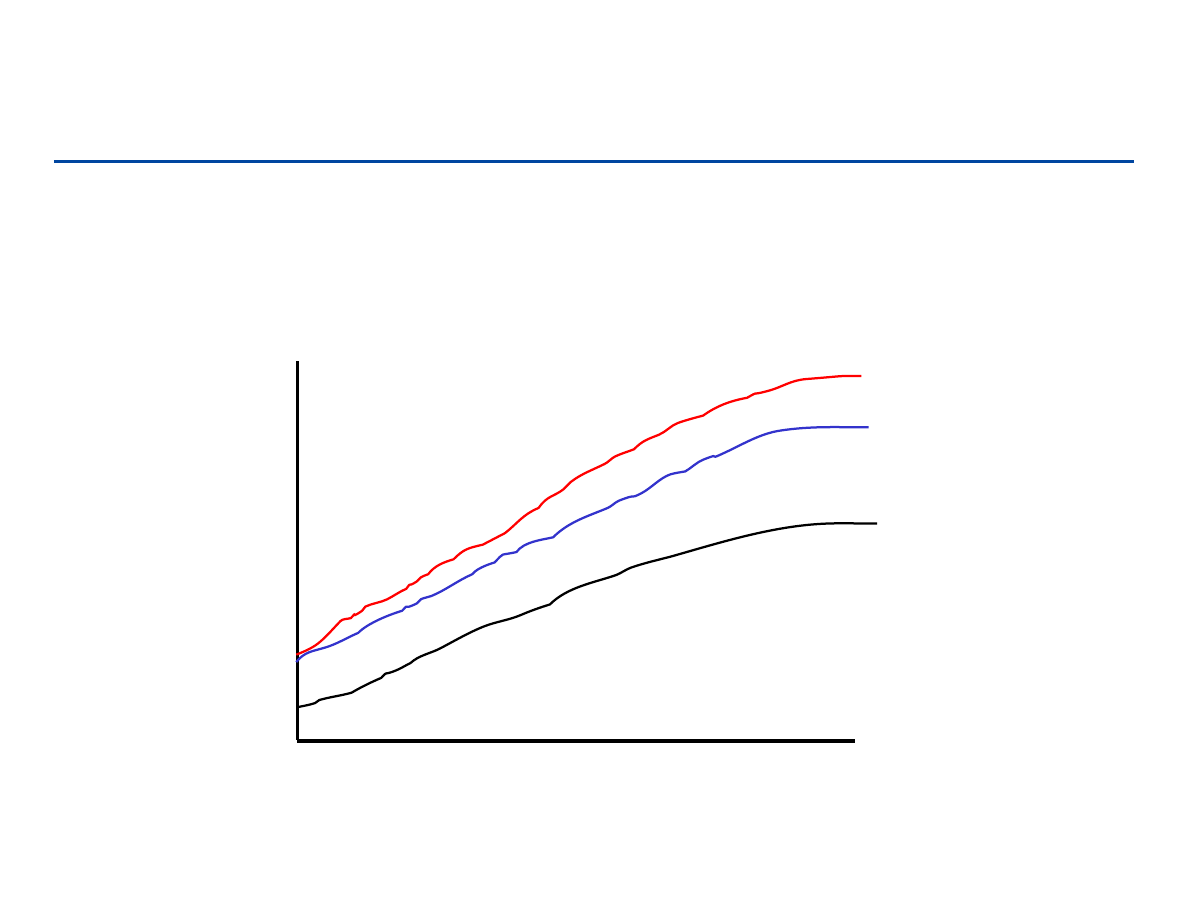
Przypadki: najlepszy/najgorszy/średni
– Dla różnych n:
1n
2n
3n
4n
5n
6n
Rozmiar wejścia
C
za
s
dz
ia
ła
ni
a
1 2 3 4 5 6 7 8 9 10 11 12 …..
najlepszy przypadek
„średni” przypadek
najgorszy przypadek
21
Przypadki: najlepszy/najgorszy/średni
Analizę najgorszego przypadku stosuje się zwykle wtedy, kiedy czas działania
jest czynnikiem krytycznym (kontrola lotów, sterowanie podawaniem leków itp.)
Dla pewnych zadań „najgorsze” przypadki mogą występować dość często.
Określenie przypadku „średniego” (analiza probabilistyczna) jest często bardzo
kłopotliwe
22
Różnice w podejściu?
Czy sortowanie przez wstawianie jest najlepszą strategią dla zadania
sortowania?
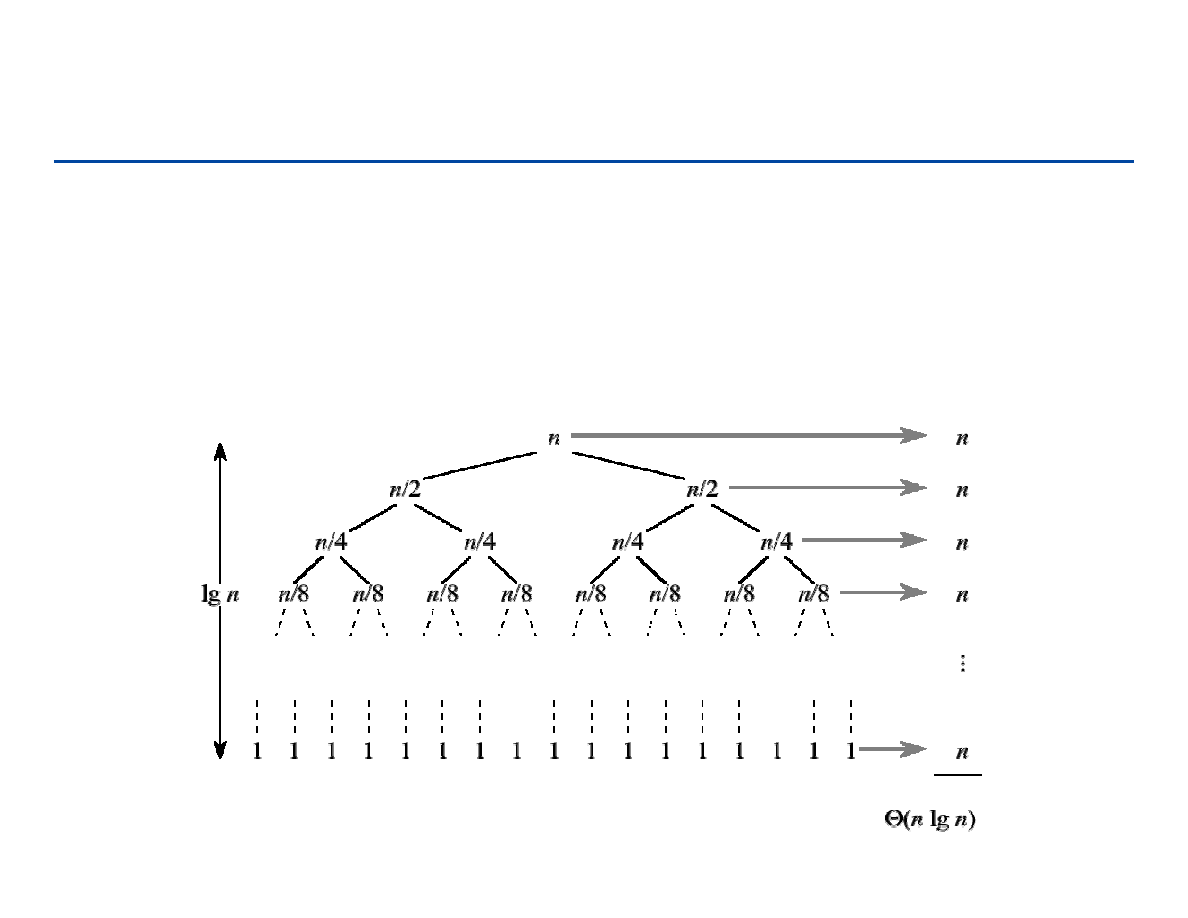
Rozważmy alternatywną strategię opartą o zasadę „dziel i zwyciężaj”:
Sortowanie przez łączenie (MergeSort):
– ciąg <4, 1, 3, 9> dzielimy na dwa podciągi
– Sortujemy te podciągi: <4, 1> i <3, 9>
– łączymy wyniki
• Czas wykonania rzędu n log n
23
Analiza wyszukiwania
INPUT: A[1..n] – tablica liczb całkowitych, q – liczba całkowita
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
j←
←
←
←
1
while
j ≤
≤
≤
≤ n and A[j] ≠
≠
≠
≠
q
do
j++
if
j ≤
≤
≤
≤ n then return j
else return NIL
INPUT: A[1..n] – tablica liczb całkowitych, q – liczba całkowita
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
j←
←
←
←
1
while
j ≤
≤
≤
≤ n and A[j] ≠
≠
≠
≠
q
do
j++
if
j ≤
≤
≤
≤ n then return j
else return NIL
Najgorszy przypadek:
C n
Średni przypadek:
C n/2
24
Poszukiwanie binarne
INPUT: A[1..n] – posortowana tablica liczb całkowitych, q – liczba całkowita.
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
left←
←
←
←
1
right←
←
←
←n
do
j←
←
←
←
(left+right)/2
if
A[j]=q then return j
else if
A[j]>q then right←
←
←
←
j-1
else
left=j+1
while
left<=right
return NIL
INPUT: A[1..n] – posortowana tablica liczb całkowitych, q – liczba całkowita.
OUTPUT: indeks j taki, że A[j] = q. NIL, jeśli ∀
∀
∀
∀
j (1≤
≤
≤
≤
j≤
≤
≤
≤
n): A[j] ≠
≠
≠
≠
q
left←
←
←
←
1
right←
←
←
←n
do
j←
←
←
←
(left+right)/2
if
A[j]=q then return j
else if
A[j]>q then right←
←
←
←
j-1
else
left=j+1
while
left<=right
return NIL
Pomysł: „dziel i zwyciężaj”
25
Poszukiwanie binarne - analiza
Ile razy wykonywana jest pętla:
– Po każdym przebiegu różnica między left a right zmniejsza się o
połowę
• początkowo n
• pętla kończy się kiedy różnica wynosi 1 lub 0
– Ile razy trzeba połowić n żeby dostać 1?
– lg n – lepiej niż poprzedni algorytm (n)

26
Poprawność algorytmów
27
Przegląd
Poprawność algorytmów
Podstawy matematyczne:
– Przyrost funkcji i notacje asymptotyczne
– Sumowanie szeregów
– Indukcja matematyczna
28
Poprawność algorytmów
Algorytm jest poprawny jeżeli dla każdego legalnego wejścia kończy
swoje działanie i tworzy pożądany wynik.
Automatyczne dowiedzenie poprawności nie możliwe
Istnieją jednak techniki i formalizmy pozwalające na dowodzenie
poprawności algorytmów
29
Poprawność – praktyczna i całkowita
Praktyczna
Poprawne dane
algorytm
Wynik
Jeśli
ten punkt został
osiągnięty
to
otrzymaliśmy poprawny wynik
Całkowita poprawność
Poprawne dane
algorytm
Wynik
i
otrzymamy poprawny wynik
Zawsze
ten punkt zostanie
osiągnięty
30
Dowodzenie
W celu dowiedzenia poprawności algorytmu wiążemy ze specyficznymi
miejscami algorytmu stwierdzenia (dotyczące stanu wykonania).
– np., A[1], …, A[k] są posortowane niemalejąco
Warunki początkowe (Precondition) – stwierdzenia, których prawdziwość
zakładamy przed wykonaniem algorytmu lub podprogramu (
INPUT
)
Warunki końcowe (Postcondition) – stwierdzenia, które muszą być
prawdziwe po wykonaniu algorytmu lub podprogramu (
OUTPUT
)
31
Niezmienniki pętli
Niezmienniki – stwierdzenia prawdziwe za każdym razem kiedy osiągany
jest pewien punkt algorytmu (może to zdarzać się wielokrotnie w czasie
wykonania algorytmu, np. w pętli)
Dla niezmienników pętli należy pokazać :
–
Inicjalizację – prawdziwość przed pierwszą iteracją
–
Zachowanie – jeśli stwierdzenie jest prawdziwe przed iteracją to
pozostaje prawdziwe przed następną iteracją
–
Zakończenie – kiedy pętla kończy działanie niezmiennik daje własność
przydatną do wykazania poprawności algorytmu
32
Przykład: poszukiwanie binarne (1)
inicjalizacja: left = 1, right = n niezmiennik jest prawdziwy (nie ma
elementów w [1..left-1] i [right+1..n] )
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
Chcemy mieć pewność, że
jeżeli zwracany jest NIL to
wartości q nie ma w tablicy A
niezmiennik: na początku
każdego wykonania pętli
while
A[i] < q dla każdego i∈[1..left-1]
oraz A[i] > q dla każdego
i∈[right+1..n]
33
Przykład: poszukiwanie binarne (2)
zachowanie: jeśli A[j]>q, to A[i] > q dla wszystkich i ∈
∈
∈
∈
[j..n], ponieważ
tablica jest posortowana. Wtedy przypisano j-1 do right. Stąd, druga
część niezmiennika również zachodzi. Analogicznie pokazuje się
pierwszą część.
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
niezmiennik: na początku
każdego wykonania pętli
while A[i] < q dla każdego
i∈[1..left-1] oraz A[i] > q dla
każdego i∈[right+1..n]
34
Przykład: poszukiwanie binarne (3)
Zakończenie: kiedy pętla kończy działanie, mamy left > right.
Niezmiennik oznacza, że q jest mniejsze od wszystkich elementów A na
lewo od left oraz większy od wszystkich elementów A na prawo od
right. To wyczerpuje wszystkie elementy A.
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
left←1
right←n
do
j←(left+right)/2
if A[j]=q then return j
else if A[j]>q then right←j-1
else left=j+1
while left<=right
return NIL
niezmiennik: na początku
każdego wykonania pętli
while A[i] < q dla każdego
i∈[1..left-1] oraz A[i] > q dla
każdego i∈[right+1..n]
35
Przykład: sortowanie przez wstawianie
niezmiennik: na początku
każdego wykonania pętli
for,
A[1…j-1] składa się z
posortowanych elementów
for j=2 to length(A)
do key
←
A[j]
i
←
j-1
while i>0 and A[i]>key
do A[i+1]
←
A[i]
i--
A[i+1]
←
key
for j=2 to length(A)
do key
←
A[j]
i
←
j-1
while i>0 and A[i]>key
do A[i+1]
←
A[i]
i--
A[i+1]
←
key
inicjalizacja:
j = 2, niezmiennik jest trywialny, A
[1] jest zawsze posortowana
zachowanie: wewnątrz pętli while przestawia się elementy A[j-1], A[j-2], …,
A[j-k] o jedną pozycję bez zmiany ich kolejności. Element
A[j]
jest wstawiany
na
k
-tą pozycję, tak że
A[k-1]≤A[k]≤A[k+1]
. Stąd
A[1..j-1]
jest
posortowane.
zakończenie: kiedy pętla się kończy (
j=n+1
) niezmiennik oznacza, że cała
tablica została posortowana.
36
Notacje asymptotyczne
Cel: uproszczenie analizy czasy wykonania, zaniedbywanie „szczegółów”,
które mogą wynikać ze specyficznej implementacji czy sprzętu
– “zaokrąglanie” dla liczb: 1,000,001 ≈ 1,000,000
– “zaokrąglanie” dla funkcji: 3n
2
≈
n
2
Główna idea: jak zwiększa się czas wykonania algorytmu wraz ze
wzrostem rozmiaru wejścia (w granicy).
– Algorytm asymptotycznie lepszy będzie bardziej efektywny dla prawie
wszystkich rozmiarów wejść (z wyjątkiem być może „małych”)
37
Notacje asymptotyczne
Notacja O (duże O)
– Asymptotyczne ograniczenie górne
– f(n) = O(g(n)), jeżeli istnieje stała c i n
0
,
takie, że
f(n) ≤
≤
≤
≤
c g(n) dla n ≥ n
0
– f(n) i g(n) są nieujemnymi funkcjami
całkowitymi
Korzysta się z niej przy analizie
najgorszego przypadku.
)
(
n
f
( )
c g n
⋅
0
n
Rozmiar wejścia
C
za
s
d
zi
ał
an
ia
38
Notacja Ω
Ω
Ω
Ω
(duża Ω
Ω
Ω
Ω
)
– Asymptotyczne ograniczenie dolne
– f(n) = Ω(g(n)) jeśli istnieje stała c i n
0
,
takie, że
c g(n) ≤
≤
≤
≤
f(n) dla n ≥ n
0
Opisuje najlepsze możliwe zachowanie się
algorytmu
Rozmiar wejścia
C
za
s
d
zi
ał
an
ia
)
(
n
f
( )
c g n
⋅
0
n
Notacje asymptotyczne
39
Notacje asymptotyczne
Prosta zasada: odrzucamy mniej istotne dla czasu składniki i czynniki
stałe.
– 50 n log n jest O(n log n)
– 7n - 3 jest O(n)
– 8n
2
log n + 5n
2
+ n jest O(n
2
log n)
O jest ograniczeniem górnym więc np. (50 n log n) jest typu O(n
5
), ale
interesuje nas najlepsze możliwe oszacowanie – w tym przypadku jest to
O(n log n)
40
Notacja Θ
Θ
Θ
Θ ((((
duża Θ
Θ
Θ
Θ
)
– Dokładne oszacowanie asymptotyczne
– f(n) = Θ(g(n)) jeżeli istnieją stałe c
1
, c
2
, i
n
0
, takie, że
c
1
g(n) ≤
≤
≤
≤
f(n) ≤
≤
≤
≤
c
2
g(n) dla
n ≥ n
0
f(n) = Θ
Θ
Θ
Θ
(g(n)) wtedy i tylko wtedy,
gdy f(n) =
Ο
Ο
Ο
Ο
(g(n)) i f(n) = Ω
Ω
Ω
Ω
(g(n))
Rozmiar wejścia
C
za
s
d
zi
ał
an
ia
)
(
n
f
0
n
Notacje asymptotyczne
)
(
n
g
c
⋅
2
)
(
n
g
c
⋅
1
41
Notacje asymptotyczne
Istnieją dwie inne notacje asymptotyczne:
– „małe o" – f(n)=o(g(n))
mocniejsze ograniczenie analogiczne do O
• Dla każdego c, musi istnieć n
0
, takie, że
f(n) ≤
≤
≤
≤
c g(n) dla n ≥ n
0
– „mała omega" – f(n)=
ω
(g(n))
analogicznie dla
Ω
42
Notacje asymptotyczne
Analogie do zależności pomiędzy liczbami:
– f(n) = O(g(n))
≅
f ≤
≤
≤
≤
g
– f(n) = Ω(g(n))
≅
f ≥ g
– f(n) = Θ(g(n))
≅
f =
=
=
=
g
– f(n) = o(g(n))
≅
f <
<
<
<
g
– f(n) =
ω
(g(n))
≅
f >
>
>
>
g
Zwykle zapisujemy: f(n) = O(g(n)) , co formalnie powinno być rozumiane
jako f(n) ∈
∈
∈
∈
O(g(n))
43
Porównanie czasów wykonania
31
25
19
2
n
244
88
31
n
4
42426
5477
707
2n
2
7826087
166666
4096
20n log n
9000000
150000
2500
400n
1 godzina
1 minuta
1 sekunda
Maksymalny rozmiar problemu (n)
44
Szeregi
Szereg geometryczny
– Dana jest liczba całkowita n
0
i rzeczywiste 0< a
≠
1
– Szereg geometryczny reprezentuje przyrost wykładniczy
Szereg arytmetyczny
– Przyrost kwadratowy
1
2
0
1
1
...
1
n
n
i
n
i
a
a
a
a
a
a
+
=
−
= +
+
+
+
=
−
∑
0
(1
)
1 2 3 ...
2
n
i
n
n
i
n
=
+
= + + +
+
=
∑
45
Czas działania sortowania przez wstawianie jest zdeterminowany przez
zagnieżdżone pętlę
Czas wykonania pętli reprezentuje szereg
Sumowanie
2
2
(
1)
(
)
n
j
j
O n
=
−
=
∑
for j←2 to n
do key←A[j]
wstaw A[j] do posortowanej
sekwencji A[1..j-1]
i←j-1
while i>0 and A[i]>key
do A[i+1]←A[i]
i--
A[i+1]:=key
czas
c
1
c
2
0
c
3
c
4
c
5
c
6
c
7
ile razy
n
n-1
n-1
n-1
n-1
2
n
j
j
t
=
∑
2
(
1)
n
j
j
t
=
−
∑
2
(
1)
n
j
j
t
=
−
∑
46
Dowody indukcyjne
Chcemy pokazać prawdziwość własności P dla wszystkich liczb
całkowitych n ≥
≥
≥
≥
n
0
Założenie indukcyjne: dowodzimy prawdziwości P dla n
0
Krok indukcyjny: dowodzimy, że z prawdziwości P dla wszystkich k, n
0
≤
≤
≤
≤
k ≤
≤
≤
≤
n – 1 wynika prawdziwość P dla n
Przykład:
Założenie ind.
1
0
1(1 1)
(1)
2
i
S
i
=
+
=
=
∑
1
n
dla
,
2
)
1
n
(
n
i
)
n
(
S
n
0
i
≥
+
=
=
∑
=
47
Dowody indukcyjne
0
1
0
0
2
(
1)
( )
for 1 k
1
2
( )
(
1)
(
1 1)
(
2 )
(
1)
2
2
(
1)
2
k
i
n
n
i
i
k k
S k
i
n
S n
i
i
n S n
n
n
n
n
n
n
n
n n
=
−
=
=
+
=
=
≤
≤
−
=
=
+
=
−
+
=
− +
− +
=
−
+
=
=
+
=
∑
∑ ∑
Krok indukcyjny
dla

48
Metoda „dziel i zwyciężaj”
49
Wprowadzenie
Technika konstrukcji algorytmów
dziel i zwyciężaj.
przykładowe problemy:
– Wypełnianie planszy
– Poszukiwanie (binarne)
– Sortowanie (sortowanie przez łączenie - merge sort).
50
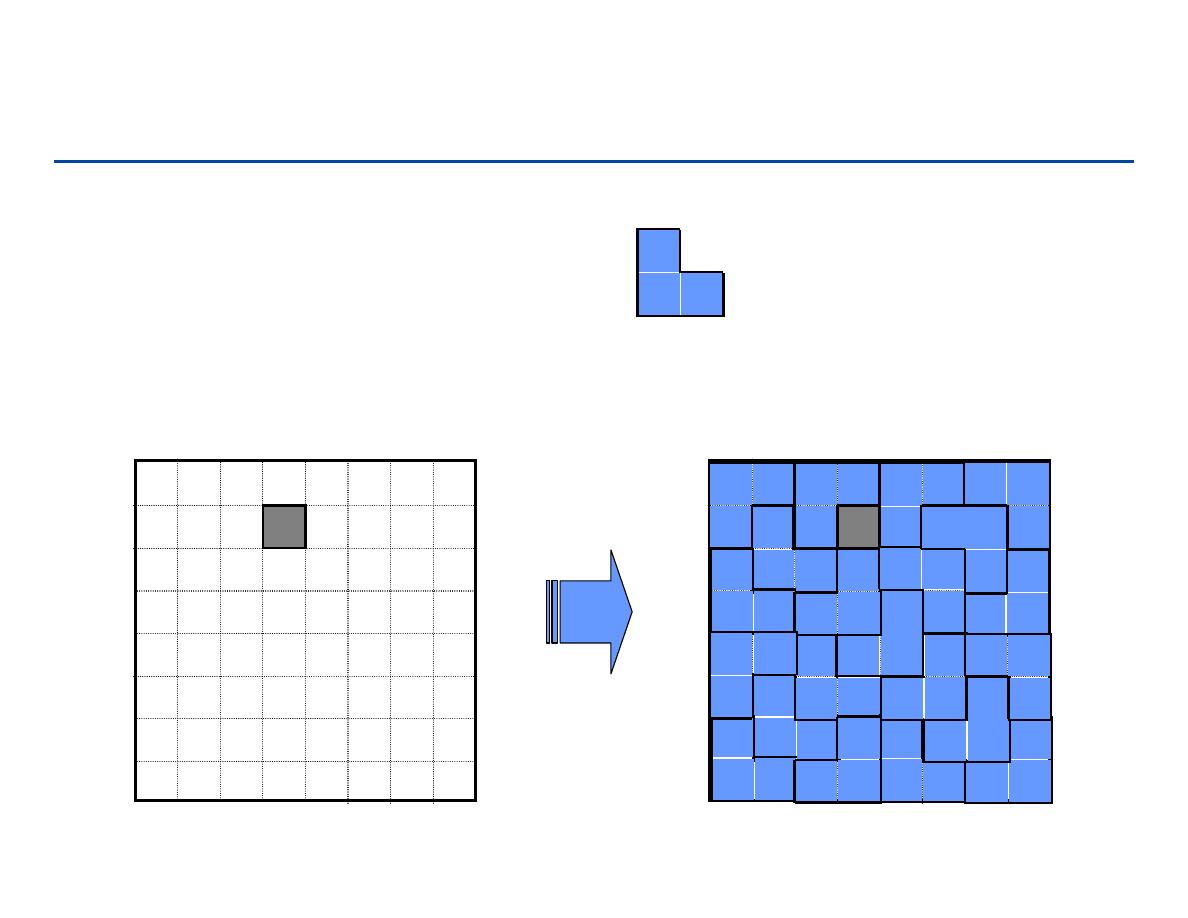
Wypełnianie planszy
Zadanie: dysponując klockami
oraz planszą 2
n
x2
n
z
brakującym polem:
Wypełnić plansze w
całości:
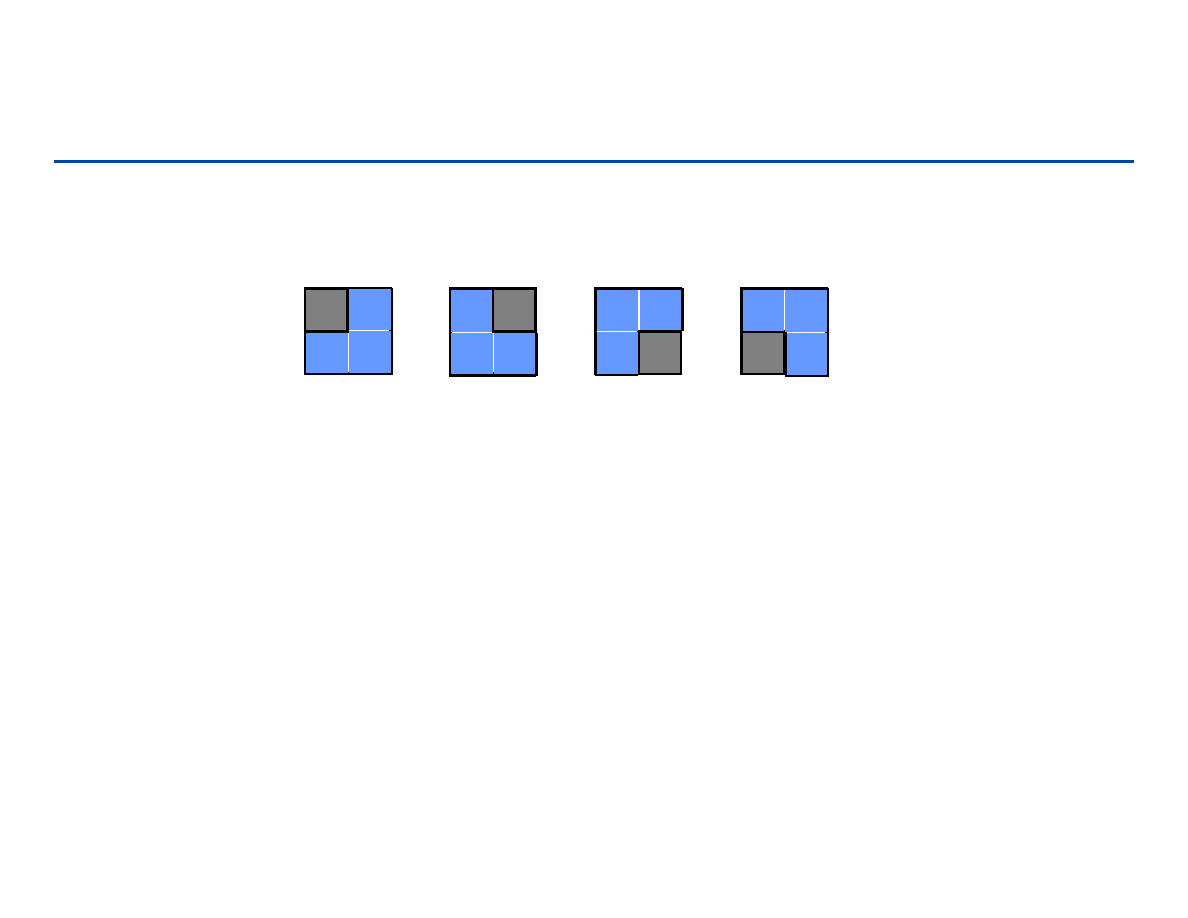
51
Wypełnianie planszy: przypadki trywialne (n = 1)
Przypadek trywialny (n = 1): wypełniamy plansze jednym klockiem:
Idea dla rozwiązania problemu – doprowadzić
rozmiar zadania do przypadku trywialnego, który
umiemy rozwiązać
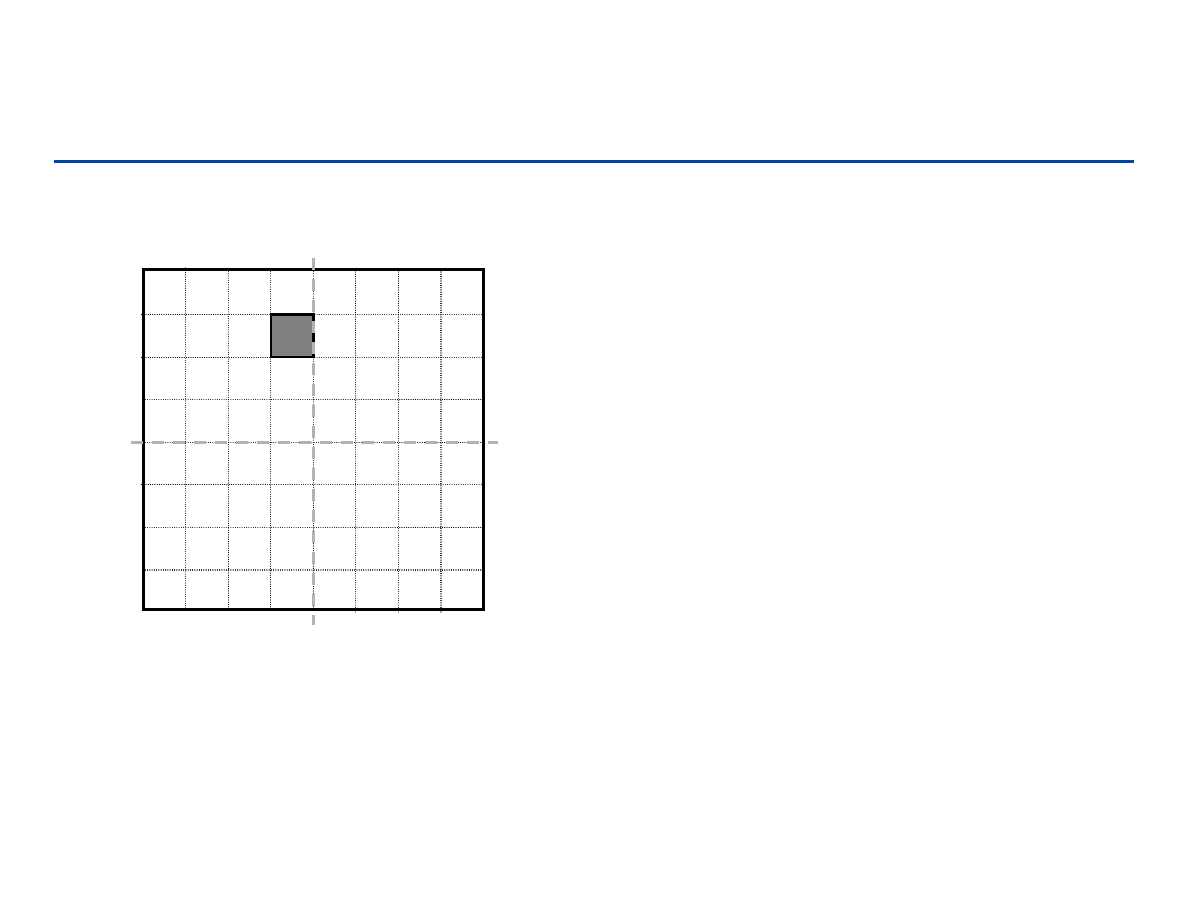
52
Wypełnianie planszy : podział zadania
Oryginalną planszę dzielimy na 4 części
Dostajemy problemy o rozmiarze 2
n-1
x2
n-1
Ale: trzy z nich nie są podobne do
oryginalnego (plansze nie mają brakującego
pola)!
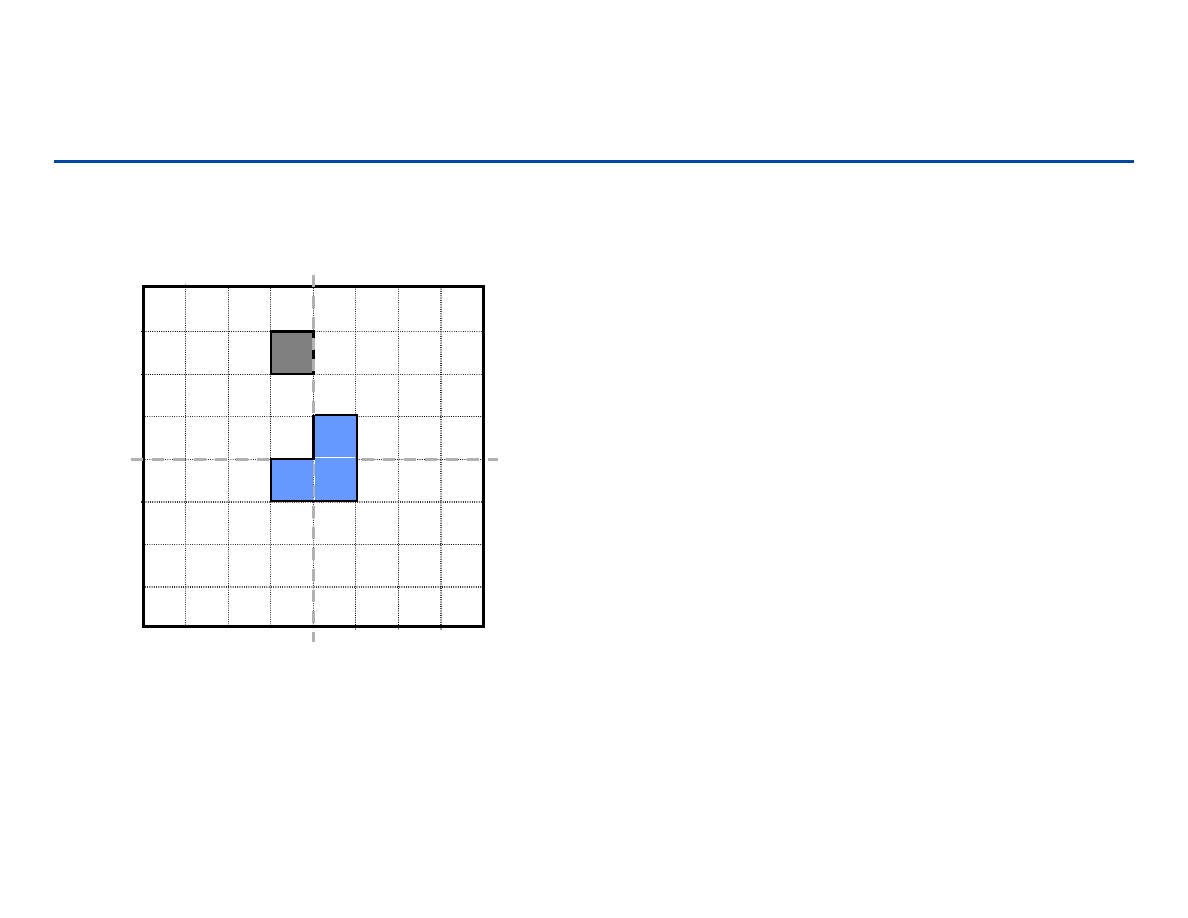
53
Wypełnianie planszy : podział zadania
pomysł: umieszczamy jeden klocek w środku planszy i dokonujemy
podziału na 4 części
Teraz otrzymujemy 4 plansze o rozmiarach 2
n-1
x2
n-1
.
Każda z planszy ma brakujące pole
54
Wypełnianie planszy : algorytm
INPUT: n – plansza 2
n
x2
n
, L – pozycja brakującego pola.
OUTPUT: wypełniona plansza
Tile
(n, L)
if
n = 1 then
przypadek trywialny
wypełnij jednym klockiem
return
umieść jeden klocek w środku planszy
podziel planszę na 4 równe części
Niech L1, L2, L3, L4 oznaczają pozycje 4 brakujących pól
Tile
(n-1, L1)
Tile
(n-1, L2)
Tile
(n-1, L3)
Tile
(n-1, L4)
INPUT: n – plansza 2
n
x2
n
, L – pozycja brakującego pola.
OUTPUT: wypełniona plansza
Tile
(n, L)
if
n = 1 then
przypadek trywialny
wypełnij jednym klockiem
return
umieść jeden klocek w środku planszy
podziel planszę na 4 równe części
Niech L1, L2, L3, L4 oznaczają pozycje 4 brakujących pól
Tile
(n-1, L1)
Tile
(n-1, L2)
Tile
(n-1, L3)
Tile
(n-1, L4)
55
Dziel i zwyciężaj
Metoda konstrukcji algorytmów „Dziel i zwyciężaj” :
– Jeśli problem jest na tyle mały, że umiesz go rozwiązać - zrób to. Jeśli nie
to:
•
Podział: Podziel problem na dwa lub więcej rozdzielnych
podproblemów
•
Rozwiązanie: Wykorzystaj metodę rekurencyjnie dla rozwiązania tych
podproblemów
•
Łączenie: połącz rozwiązania podproblemów tak, aby rozwiązać
oryginalny problem
56
Wypełnianie planszy : Dziel i zwyciężaj
Wypełnianie jest przykładem algorytmu „dziel i zwyciężaj” :
– w wypadku trywialnym (2x2) – po prostu wypełniamy planszę, lub:
–
Dzielimy planszę na 4 mniejsze części (wprowadzając wypełnione miejsce
w rogu, przez umieszczenie centralnie jednego klocka)
–
Rozwiązujemy problem rekursywnie stosując tą samą metodę
–
Łączymy części umieszczając klocek w środku planszy
57
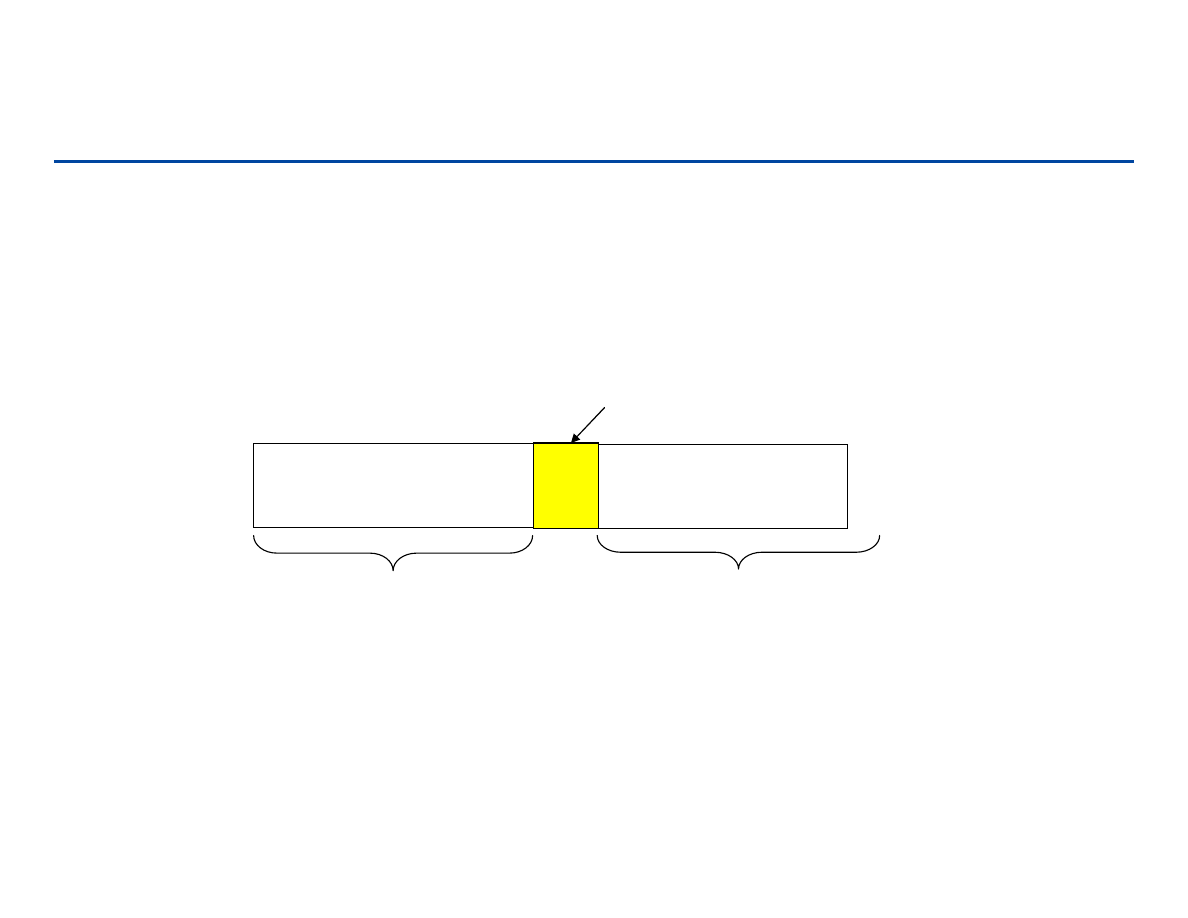
Odnaleźć
liczbę w posortowanej tablicy:
– Przypadek trywialny – tablica jest jednoelementowa
– Albo
dzielimy tablice na dwie równe części i rozwiązujemy zadanie
osobno dla każdej z
nich
Poszukiwanie binarne
INPUT: A[1..n] – posortowana niemalejąco tablica liczb, s – liczba.
OUTPUT: indeks j taki, że A[j] = s. NIL, jeśli ∀j (1≤j≤n): A[j] ≠ s
Binary-search(A, p, r, s):
if p = r then
if A[p] = s then return p
else return NIL
q←(p+r)/2
ret ←
Binary-search(A, p, q, s)
if ret = NIL then
return Binary-search(A, q+1, r, s)
else return ret
INPUT: A[1..n] – posortowana niemalejąco tablica liczb, s – liczba.
OUTPUT: indeks j taki, że A[j] = s. NIL, jeśli ∀j (1≤j≤n): A[j] ≠ s
Binary-search(A, p, r, s):
if p = r then
if A[p] = s then return p
else return NIL
q←(p+r)/2
ret ←
Binary-search(A, p, q, s)
if ret = NIL then
return Binary-search(A, q+1, r, s)
else return ret
58
Rekurencja
Czas działania algorytmu z odwołaniami rekursywnymi można opisać poprzez
rekurencję
Równanie/nierówność opisująca funkcję poprzez jej wartości dla mniejszego
argumentu
Przykład: poszukiwanie binarne
Po rozwiązaniu daje to złożoność O(n)! – taką samą jak dla metody naiwnej
(1)
if
1
( )
2 ( / 2)
(1) if
1
n
T n
T n
n
Θ
=
=
+ Θ
>
59
Poszukiwanie binarne (poprawione)
INPUT: A[1..n] – posortowana niemalejąco tablica liczb, s – liczba.
OUTPUT: indeks j taki, że A[j] = s. NIL, jeśli ∀j (1≤j≤n): A[j] ≠s
Binary-search
(A, p, r, s):
if
p = r then
if
A[p] = s then return p
else return
NIL
q←
←
←
←
(p+r)/2
if
A[q] ≤
≤
≤
≤
s then return Binary-search(A, p, q, s)
else return Binary-search
(A, q+1, r, s)
INPUT: A[1..n] – posortowana niemalejąco tablica liczb, s – liczba.
OUTPUT: indeks j taki, że A[j] = s. NIL, jeśli ∀j (1≤j≤n): A[j] ≠s
Binary-search
(A, p, r, s):
if
p = r then
if
A[p] = s then return p
else return
NIL
q←
←
←
←
(p+r)/2
if
A[q] ≤
≤
≤
≤
s then return Binary-search(A, p, q, s)
else return Binary-search
(A, q+1, r, s)
T(n) = Θ(n) – nie lepiej niż dla metody siłowej!
Poprawa: rozwiązywać zadanie tylko dla jednej połowy tablicy
60
Czas działania metody
T(n) = Θ
Θ
Θ
Θ
(lg n) !
(1)
if
1
( )
( / 2)
(1) if
1
n
T n
T n
n
Θ
=
=
+ Θ
>
61
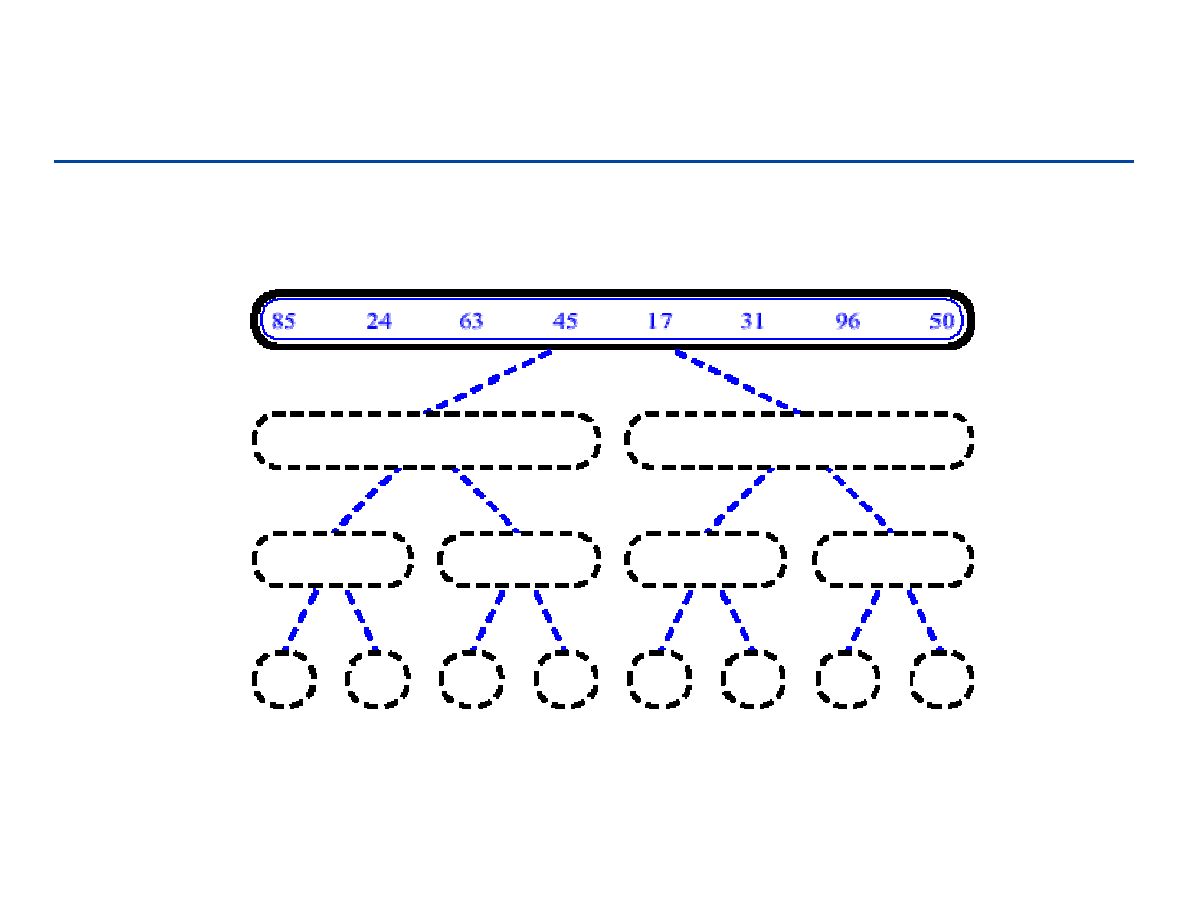
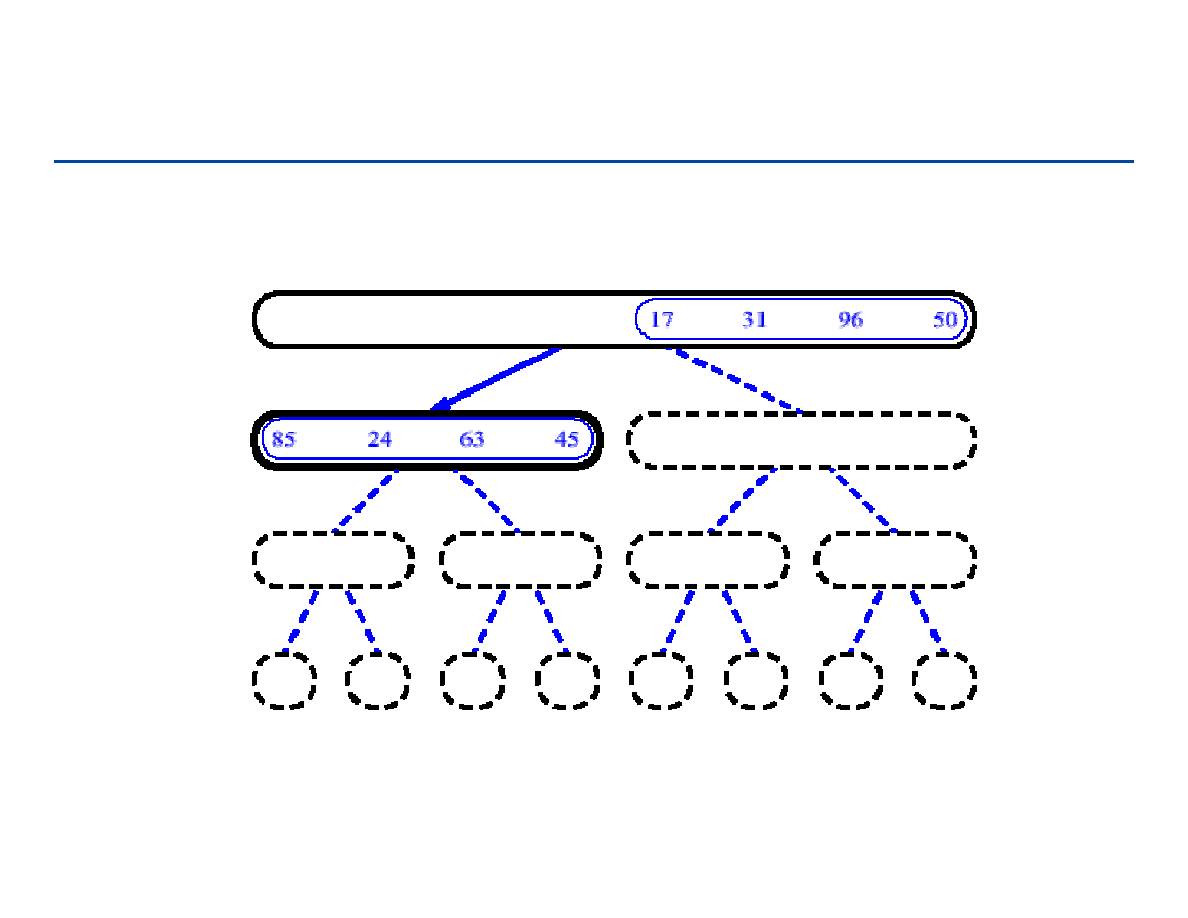
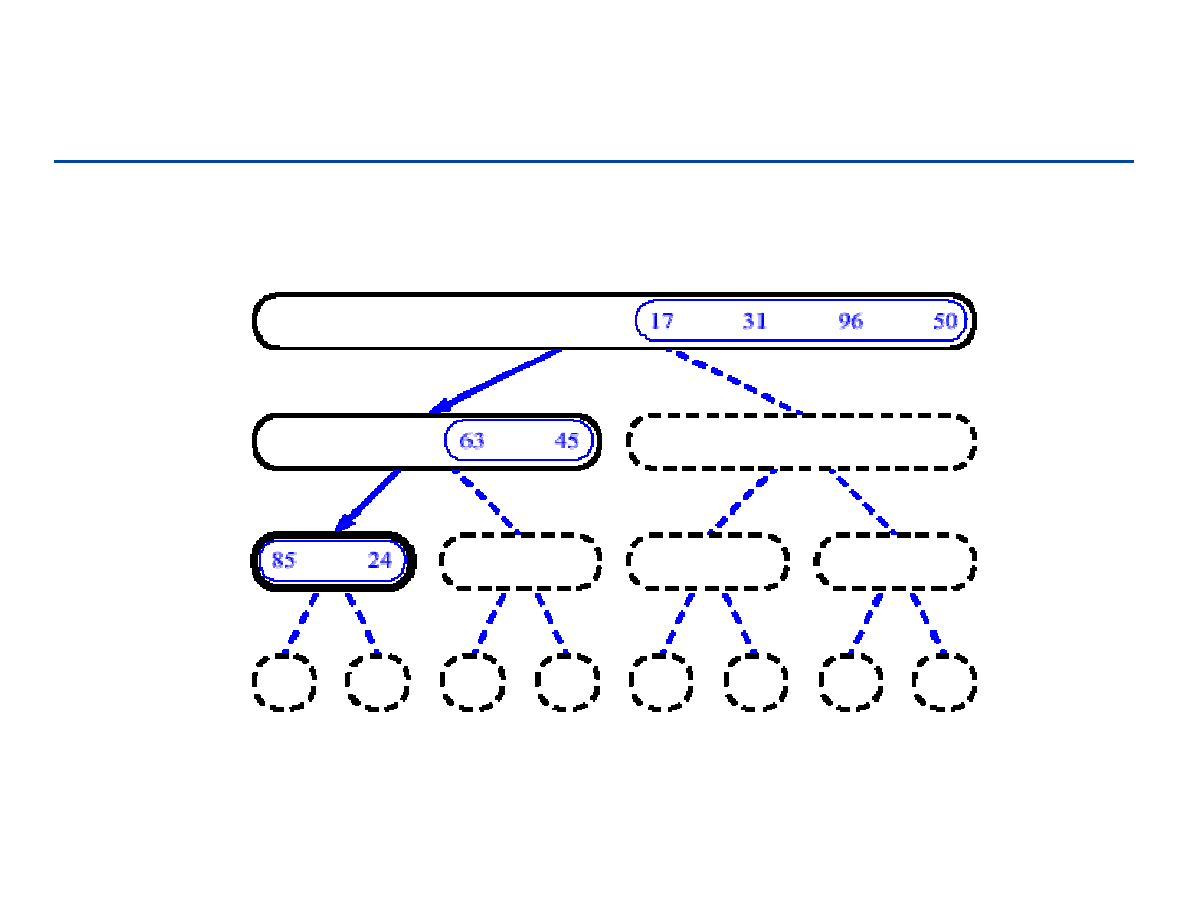
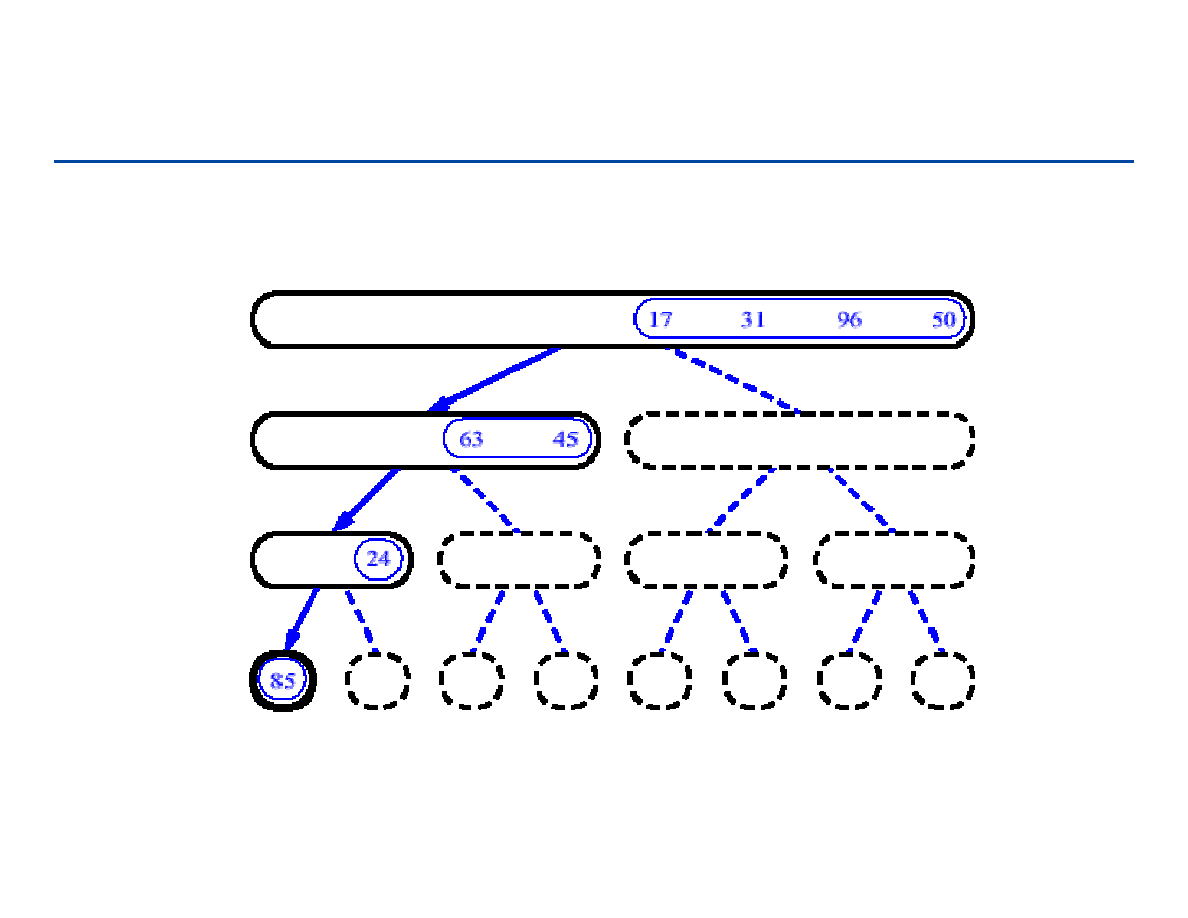
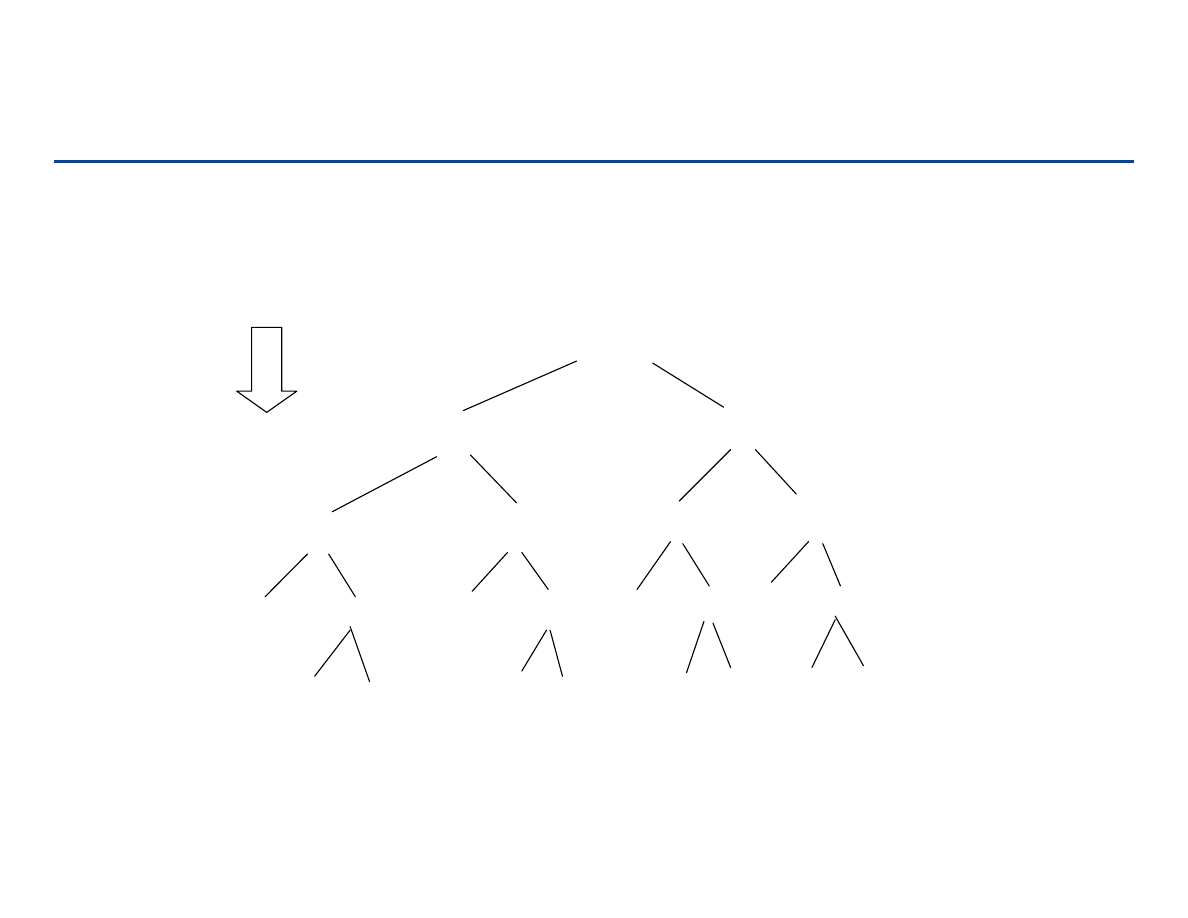
Sortowanie przez łączenie (merge sort)
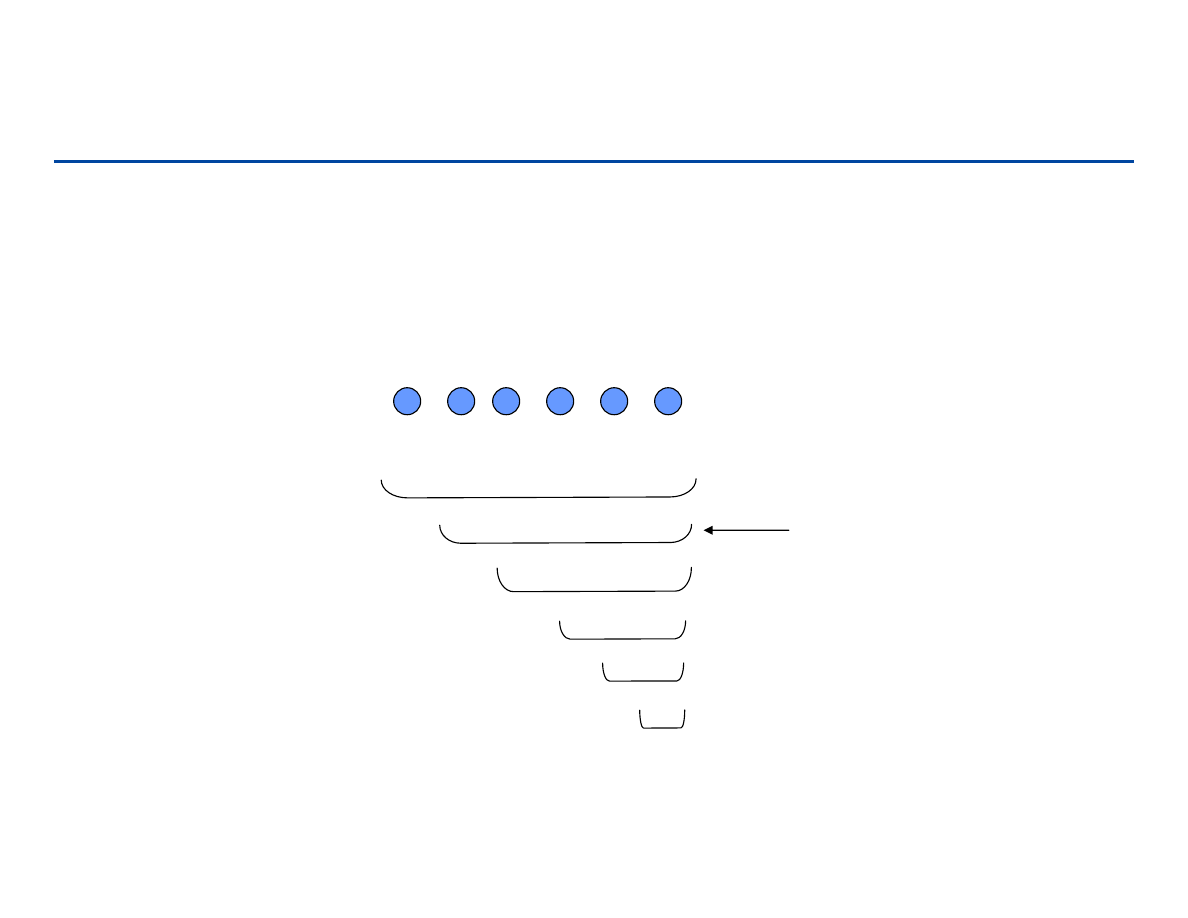
Podziel: Jeśli S posiada przynajmniej dwa elementy (1 lub 0 elementów –
przypadek trywialny), podziel S na dwie równe (z dokładnością do 1
elementu) części S
1
i S
2
. (tj. S
1
zawiera pierwsze n/2 elementów, a S
2
kolejne n/2).
Zwyciężaj: posortuj sekwencje S
1
i S
2
stosując Merge Sort.
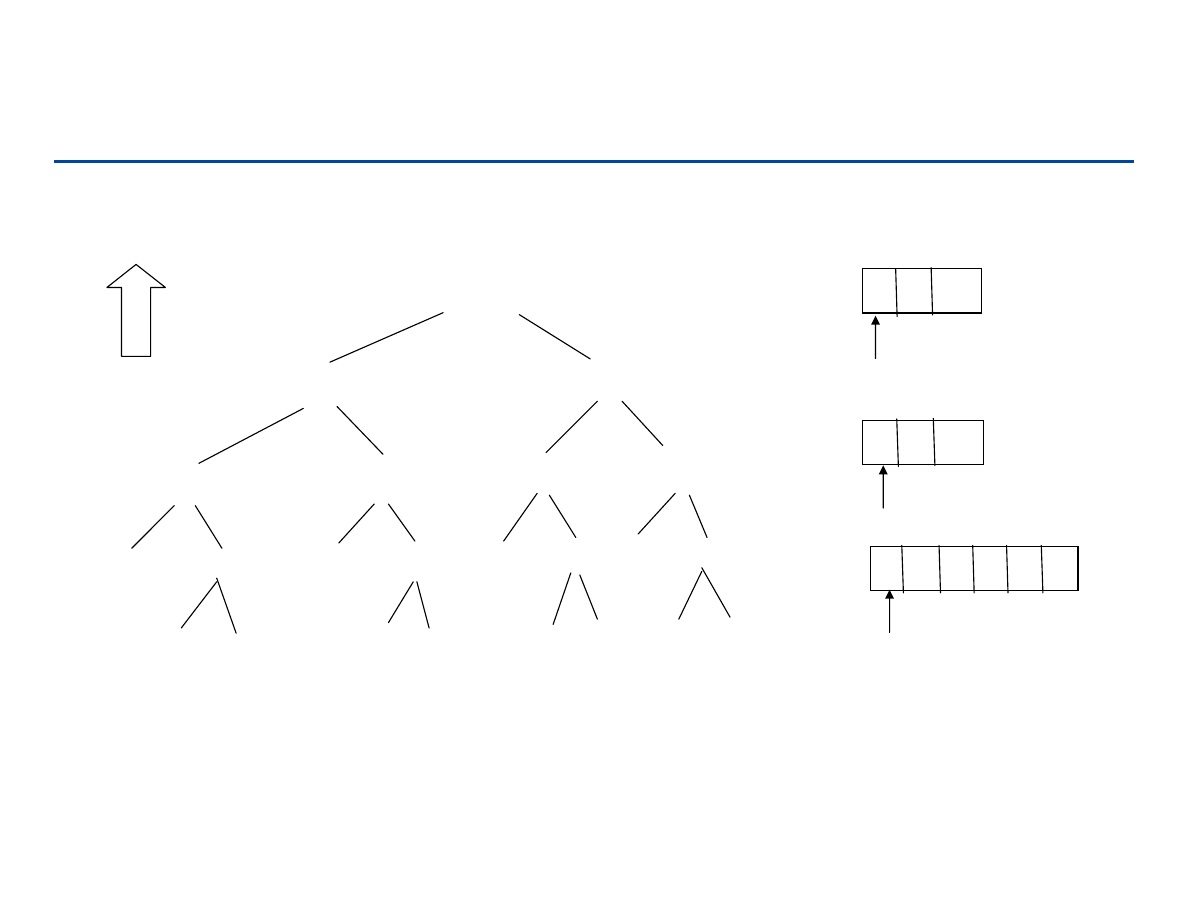
Połącz: Połącz elementy z dwóch posortowanych sekwencji S
1
i S
2
w
sekwencję S zachowaniem porządku
62
Algorytm – Merge Sort
Merge-Sort(A, p, r)
if p < r then
q← (p+r)/2
Merge-Sort(A, p, q)
Merge-Sort(A, q+1, r)
Merge(A, p, q, r)
Merge-Sort(A, p, r)
if p < r then
q← (p+r)/2
Merge-Sort(A, p, q)
Merge-Sort(A, q+1, r)
Merge(A, p, q, r)
Merge(A, p, q, r)
wybieramy mniejszy z dwóch elementów na początku
sekwencji A[p..q] oraz A[q+1..r] i wkładamy go do
sekwencji wynikowej, przestawiamy odpowiedni znacznik.
Powtarzamy to aż do wyczerpania się elementów.
Rezultat kopiujemy do A[p..r].
Merge(A, p, q, r)
wybieramy mniejszy z dwóch elementów na początku
sekwencji A[p..q] oraz A[q+1..r] i wkładamy go do
sekwencji wynikowej, przestawiamy odpowiedni znacznik.
Powtarzamy to aż do wyczerpania się elementów.
Rezultat kopiujemy do A[p..r].
63
Sortowanie przez łączenie - 1
64
Sortowanie przez łączenie - 2
65
Sortowanie przez łączenie - 3
66
Sortowanie przez łączenie - 4
67
Sortowanie przez łączenie - 5
68
Sortowanie przez łączenie - 6
69
Sortowanie przez łączenie - 7
70
Sortowanie przez łączenie - 8
71
Sortowanie przez łączenie - 9
72
Sortowanie przez łączenie - 10
73
Sortowanie przez łączenie - 11
74
Sortowanie przez łączenie - 12
75
Sortowanie przez łączenie - 13
76
Sortowanie przez łączenie - 14
77
Sortowanie przez łączenie - 15
78
Sortowanie przez łączenie - 16
79
Sortowanie przez łączenie - 17
80
Sortowanie przez łączenie - 18
81
Sortowanie przez łączenie - 19
82
Sortowanie przez łączenie - 20
83
Sortowanie przez łączenie - 21
84
Sortowanie przez łączenie - 22
85
Sortowanie przez łączenie – podsumowanie
Sortowanie n liczb
– jeśli n=1 – trywialne
– rekursywnie sortujemy 2 ciągi n/2 i
n/2 liczb
– łączymy dwa ciągi w czasie Θ(n)
Strategia
– Podział problemu na mniejsze, ale
analogiczne podproblemy
– Rekursywne rozwiązywanie
podproblemów
– Łączenie otrzymanych rozwiązań
86
Sortowanie przez łączenie – czas działania
Czas działania algorytmu może być
reprezentowany przez następującą
zależność rekurencyjną:
Po rozwiązaniu dostajemy:
(1)
if
1
( )
2 ( / 2)
( ) if
1
n
T n
T n
n
n
Θ
=
=
+ Θ
>
)
lg
(
)
(
n
n
n
T
Θ
=
87
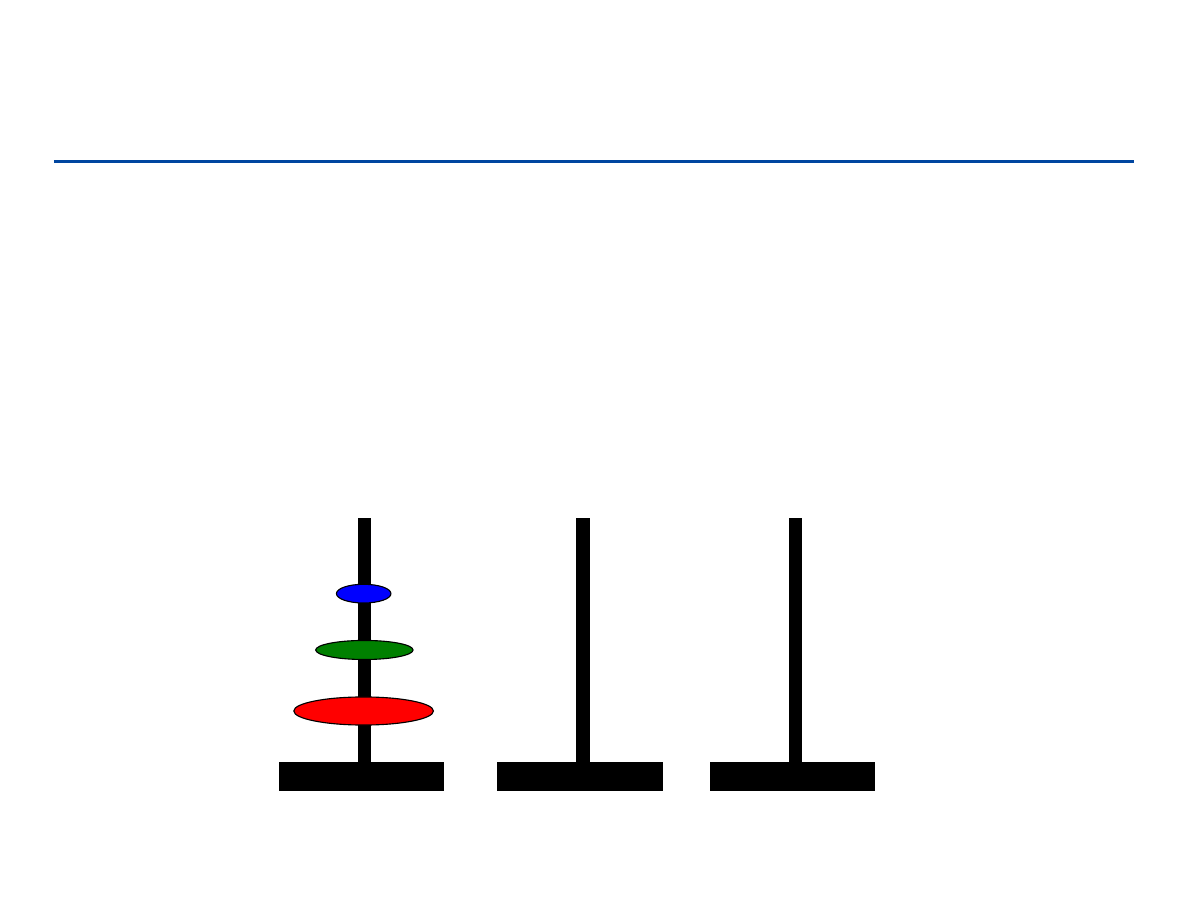
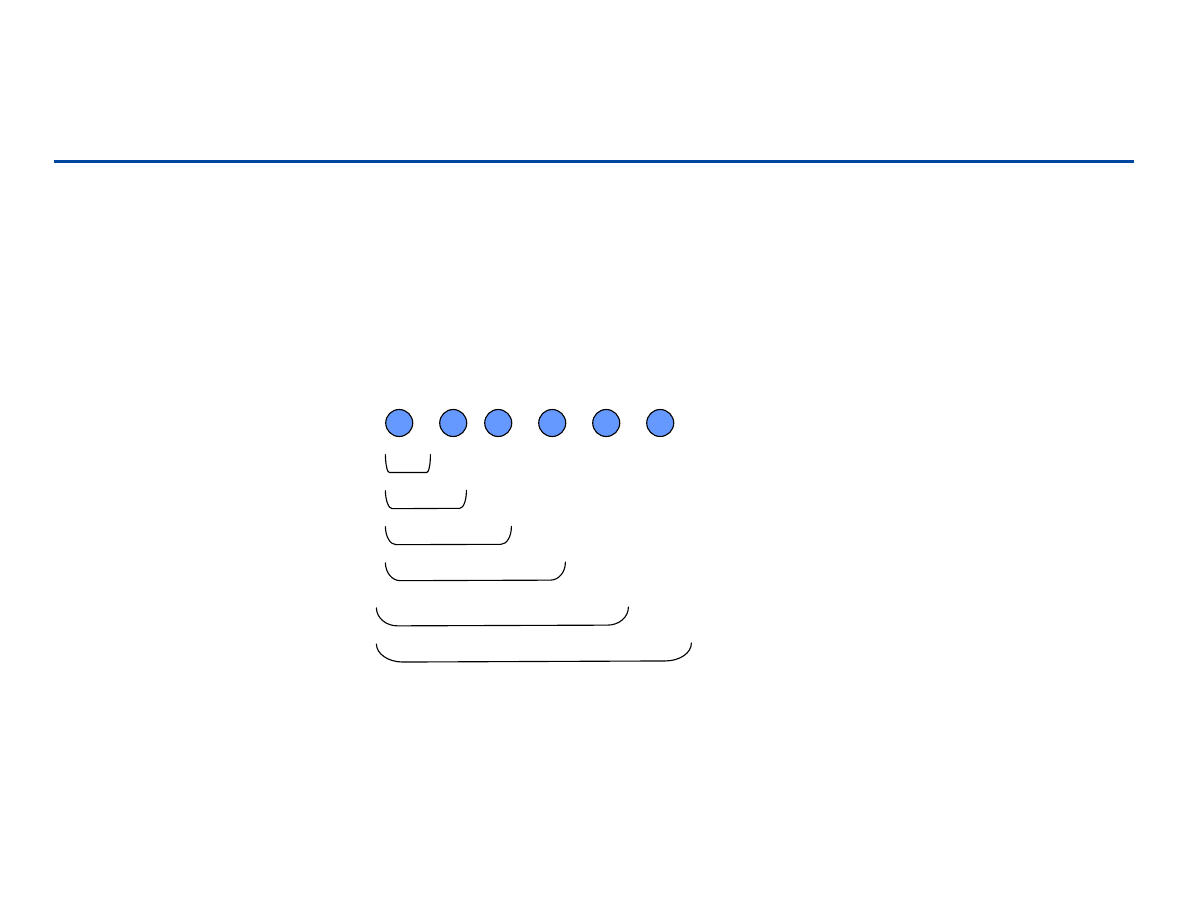
Wieże Hanoi
Mamy 3 wieże oraz stos 64 dysków o zmniejszających się średnicach
umieszczonych na pierwszej wieży
Potrzebujemy przenieść wszystkie dyski na inną wieżę
Zabronione jest położenie dysku większego na mniejszym
W każdym kroku wolno mam przenieść tylko jeden dysk
88
Wieże Hanoi
89
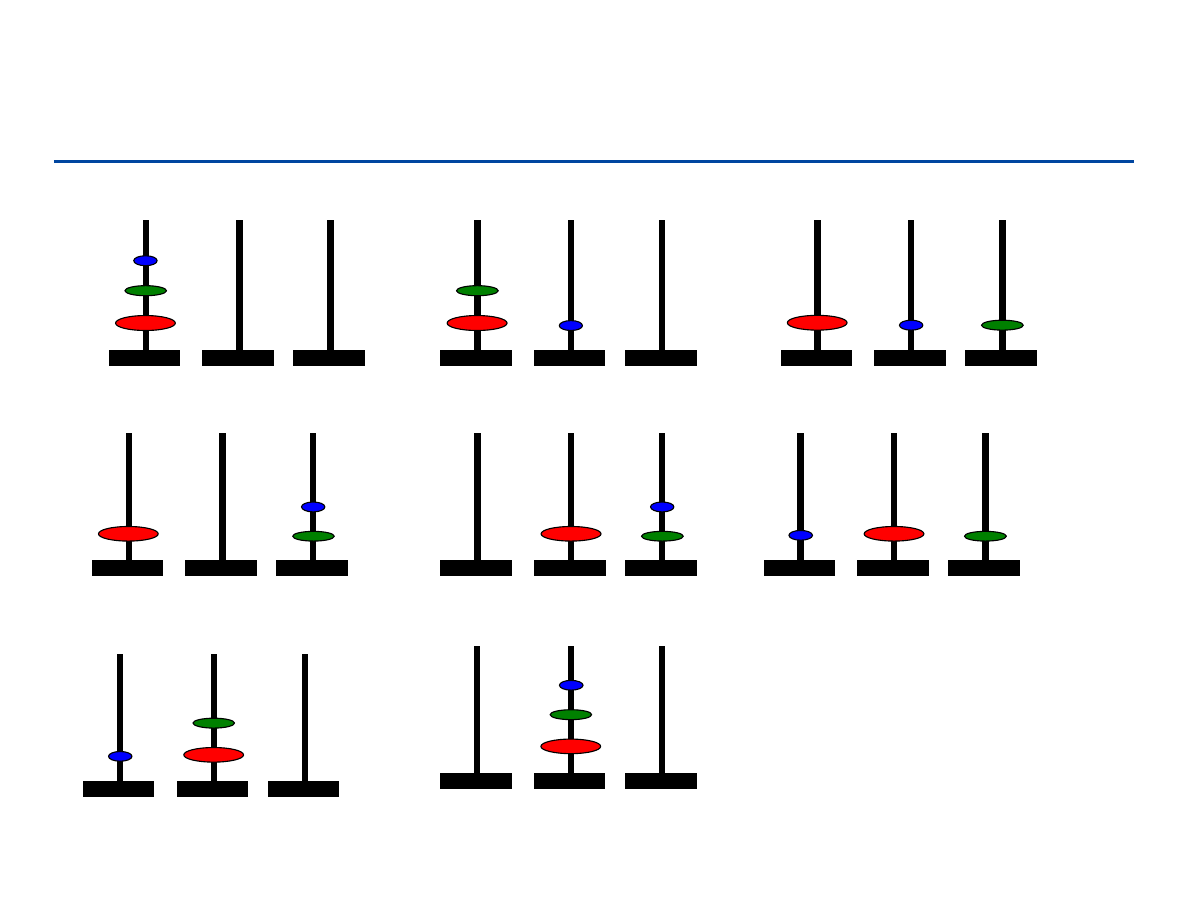
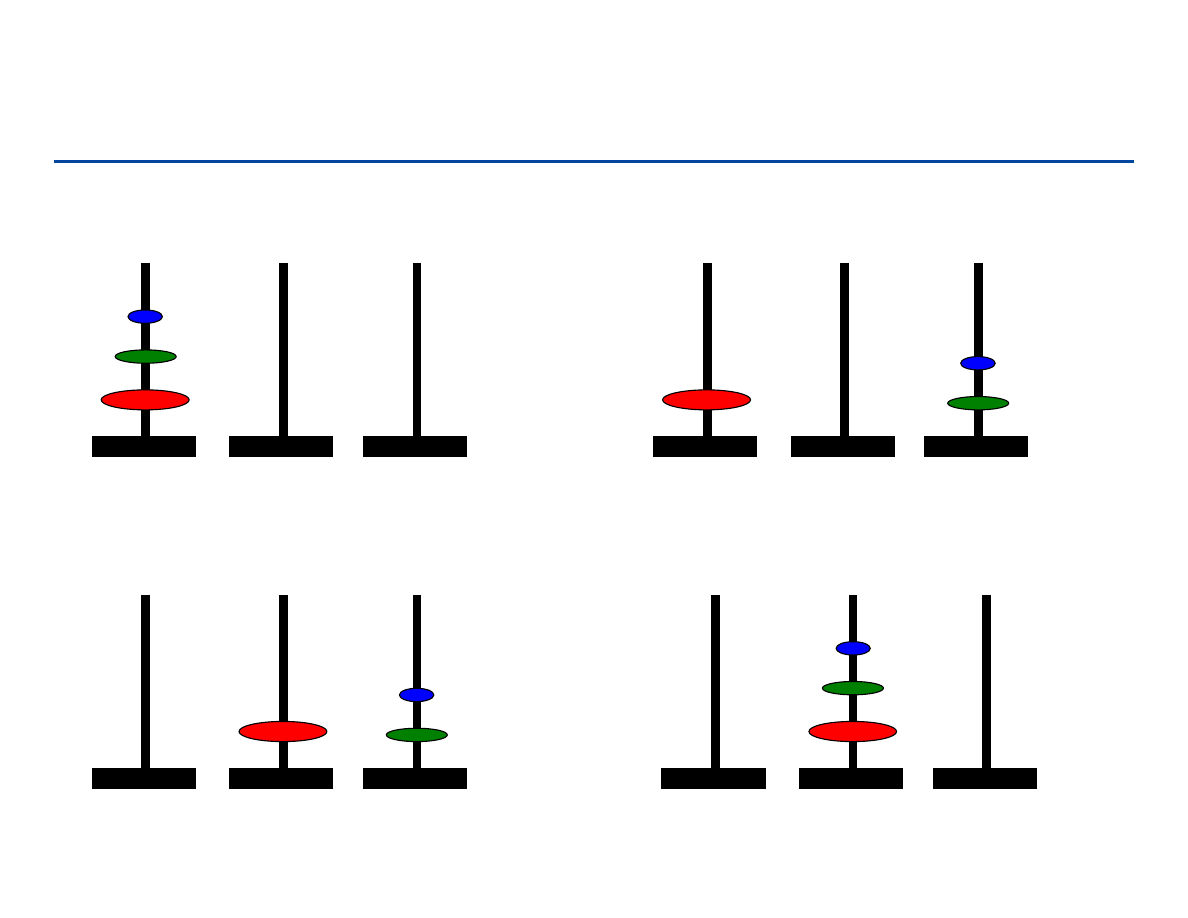
Rozwiązanie rekursywne
90
Algorytm rekursywny
INPUT: n – ilość dysków , a, b, c – wieże, wieża a zawiera wszystkie dyski.
OUTPUT: a, b, c – wieże, wieża b zawiera wszystkie dyski
Hanoi
(n, a, b, c)
if
n = 1 then
Move
(a,b);
else
Hanoi
(n-1,a,c,b);
Move
(a,b);
Hanoi
(n-1,c,b,a);
INPUT: n – ilość dysków , a, b, c – wieże, wieża a zawiera wszystkie dyski.
OUTPUT: a, b, c – wieże, wieża b zawiera wszystkie dyski
Hanoi
(n, a, b, c)
if
n = 1 then
Move
(a,b);
else
Hanoi
(n-1,a,c,b);
Move
(a,b);
Hanoi
(n-1,c,b,a);
Poprawność algorytmu łatwo pokazać przez indukcję względem n.
91
Ilość kroków
Ilość kroków M(n) potrzebnych do
rozwiązania problemu dla n dysków
spełnia zależność rekurencyjną
M(1) = 1
M(n) = 2M(n-1) + 1
15
4
31
5
7
3
3
2
1
1
M(n)
n
92
Ilość kroków
Rozwijając tę zależność dostajemy
M(n) = 2M(n-1) + 1
= 2*[2*M(n-2)+1] + 1 = 2
2
* M(n-2) + 1+2
= 2
2
* [2*M(n-3)+1] + 1 + 2
= 2
3
* M(n-3) + 1+2 + 2
2
=…
Po k krokach
M(n) = 2
k
* M(n-k) + 1+2 + 2
2
+ … + 2
n-k-1
Dla k = n-1
M(n) = 2
n-1
* M(1) + 1+2 + 2
2
+ … + 2
n-2
= 1 + 2 + … + 2
n-1
= 2
n
-1

93
Sortowanie
94
Sortowanie - zadanie
Definicja (dla liczb):
wejście: ciąg n liczb A = (a
1
, a
2
, …, a
n
)
wyjście: permutacja (a
1
,…, a’
n
) taka, że a’
1
≤
… ≤ a’
n
Po co sortować?
– Podstawowy problem dla algorytmiki
– Wiele algorytmów wykorzystuje sortowanie jako procedurę pomocniczą
– Pozwala pokazać wiele technik
– Dobrze zbadane (czas)
95
Sortowanie – taksonomia
Wewnętrzne i zewnętrzne
– Zależnie od miejsca przechowywania zbioru: (RAM czy dysk)
Sortowanie tablic i sortowanie list łączonych
– zależnie od struktury danych (pliku);
– różny sposób dostępu (bezpośredni dla tablicy, sekwencyjny dla listy).
„W miejscu” lub nie
– Nie wymaga dodatkowej pamięci
Stabilne i niestabilne
– Kolejność elementów o tych samych wartościach klucza nie zmienia się.
Inaczej kolejne sortowanie dla złożonych obiektów nie psuje efektów
poprzedniego sortowania.
Bezpośrednie i pośrednie
– zależnie od tego przemieszczamy całe obiekty, czy tylko wskaźniki
(indeksy) do nich
96
Zestawienie czasów działania
Przez wybór: O(N
2
) zawsze
Bąbelkowe: O(N
2
) najgorszy przypadek; O(N) najlepszy przyp.
Wstawianie: O(N
2
) średnio; O(N) najlepszy przypadek
Shellsort:
O(N
4/3
)
Heapsort:
O(NlogN) zawsze
Mergesort:
O(NlogN) zawsze
Quicksort:
O(NlogN) średnio; O(N
2
) najgorszy przypadek
Zliczanie:
O(N) zawsze
Radix sort:
O(N) zawsze
zewnętrzne: O(b logb)) dla pliku o b „stronach”.
97
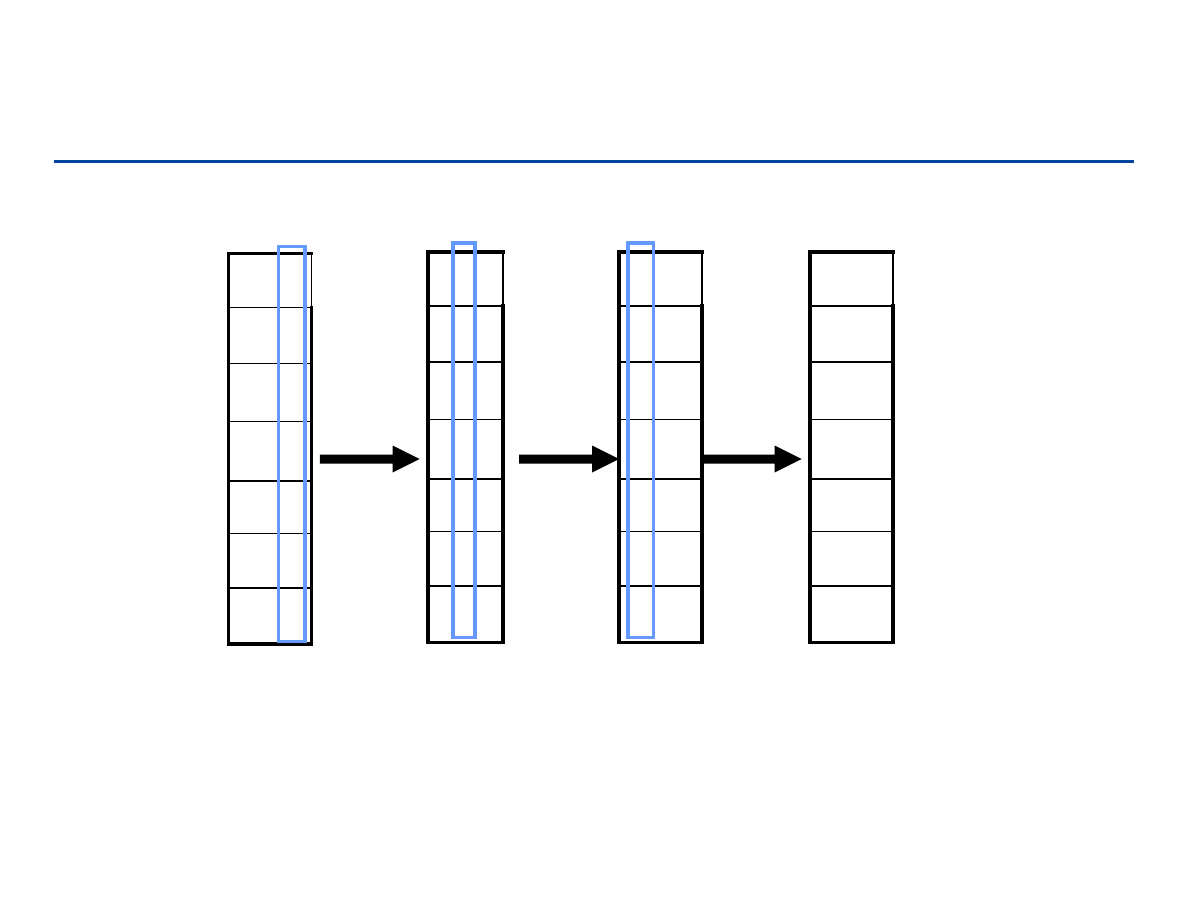
Sortowanie przez wybór – pomysł
Znajdujemy najmniejszy element ciągu i zamieniamy go z
pierwszym elementem. Powtarzamy to dla podciągu bez
pierwszego elementu, itd.
Znajdź minimum i zamień
z pierwszym elementem
X
X
98
Sortowanie przez wybór – pseudokod
Selection_Sort(int A)
1
for i ← 1 to length[A]
2
do min ← i;
3
for j ← i+1 to length[A]
4
do if A[j] < A[min] then min ← j;
5 Exchange A[min] ↔ A[i]
99
ciąg: EASYQUESTION - rozmiar 12 znaków
#porównań
#zamian
EASYQUESTION
A
ESYQUESTION
11
1
AE
SYQUESTION
10
1
AEE
YQUSSTION
9
1
AEEI
QUSSTYON
8
1
AEEIN
USSTYOQ
7
1
AEEINO
SSTYUQ
6
1
AEEINOQ
STYUS
5
1
AEEINOQS
TYUS
4
1
AEEINOQSS
YUT
3
1
AEEINOQSST
UY
2
1
AEEINOQSSTU
Y
1
1
Razem
66 11
1
2
3
4
5
6
7
8
9
10
11
Sortowanie przez wybór – przykład
iteracja
100
Sortowanie przez wybór – czas działania
Zależność od danych wejściowych:
– Ilość przebiegów: nie (zawsze N-1)
– Ilość porównań: nie
– Ilość zamian: nie
O(N
2
) zawsze (bez znaczenia jaki jest układ elementów w danych –
ważna tylko ilość)
101
Sortowanie bąbelkowe (przez zamianę)
Przechodzimy przez ciąg od jego końca, porównując sąsiadujące
elementy i ewentualnie zamieniając je miejscami. Powtarzamy te
procedurę aż do uporządkowania całego ciągu.
– Po pierwszym przejściu element minimalny znajduje się na
początku – a[0], po drugim na drugim miejscu znajduje się drugi co
do wielkości – a[1], po itd.
Porównanie do wypływających
bąbelków – stąd nazwa
.
102
Sortowanie bąbelkowe – pseudokod
BUBBLE_SORT(A)
1
for i ← 1 to length[A]
2
do for j ← length[A] downto i + 1
3
do if A[j] < A[j - 1]
4
then exchange A[j] ↔ A[j - 1]
103
Ciąg: EASYQUESTION, (12 znaków)
porównań
zamian
EASYQUESTION
(najgorszy przyp)
A
EESYQUISTNO
11 (11)
8 (11)
AE
EISYQUNSTO
10 (10)
6 (10)
AEE
INSYQUOST
9 (9)
6 (9)
AEEI
NOSYQUST
8 (8)
4 (8)
AEEIN
OQSYSUT
7 (7)
3 (7)
AEEINO
QSSYTU
6 (6)
2 (6)
AEEINOQ
SSTYU
5 (5)
1 (5)
AEEINOQS
STUY
4 (4)
1 (4)
AEEINOQS
STUY
3 (3)
0
(3)
(2)
(2)
(1)
(1)
razem
63 (66)
31 (66)
iteracja
1
2
3
4
5
6
7
8
9
Sortowanie bąbelkowe – przykład
104
Sortowanie bąbelkowe – czas wykonania
Zależność od danych wejściowych:
– Ilość potrzebnych przejść: tak
– Ilość porównań w jednym przejściu: nie
– Ilość zamian: tak
Najgorszy przypadek: O(N
2
)
– Dane odwrotnie posortowane, np.: JIHGFEDCBA.
– N-1 przejść
– (N-1)N/2 porównań i (N-1)N/2 zamian
Najlepszy przypadek: O(N)
– Jeśli elementy są już posortowane, np.: ABCDEFGHIJ.
– Tylko jedno przejście. Stąd mamy N-1 porównań i 0 zamian.
105
Sortowanie przez wstawianie – pomysł
Dla każdego elementu ciągu (od lewej do prawej), wstawiamy go
we właściwe miejsce ciągu elementów poprzedzających go (już
posortowanych).
106
Sortowanie przez wstawianie – pseudokod
INSERTION_SORT(A)
1
for j ← 2 to length[A]
2
do key ← A[j]
3 i ← j-1
4
while i>0 and A[i]>key
5
do A[i+1] ← A[i]
6
i ← i-1
7
A[i+1] ← key
107
Ciąg: EASYQUESTION, (12 znaków)
porównań
zamian
(najgorszy przyp.)
E
ASYQUESTION
A
E
SYQUESTION
1 (1)
1 (1)
AE
S
YQUESTION
1 (2)
0 (2)
AES
Y
QUESTION
1 (3)
0 (3)
AE
Q
SY
UESTION
3 (4)
2 (4)
AEQS
U
Y
ESTION
2 (5)
1 (5)
AE
E
QSUY
STION
5 (6)
4 (6)
AEEQS
S
UY
TION
3 (7)
2 (7)
AEEQSS
T
UY
ION
3 (8)
2 (8)
AEE
I
QSSTUY
ON
7 (9)
6 (9)
AEEI
O
QSSTUY
N
7 (10)
6 (10)
AEEI
N
OQSSTUY
8 (11)
7 (11)
razem
41 (66) 31 (66)
iteracja
1
2
3
4
5
6
7
8
9
10
11
Sortowanie przez wstawianie – przykład
108
Sortowanie przez wstawianie – czas działania
Zależność od danych wejściowych:
– Ilość iteracji: nie (zawsze N-1)
– Ilość porównań: tak
– Ilość zamian: tak
Najgorszy przypadek: O(N
2
)
– Elementy odwrotnie posortowane np.: JIHGFEDCBA.
– (N-1)N/2 porównań i (N-1)N/2 zamian.
Najlepszy przypadek: O(N)
– Elementy już posortowane np.: ABCDEFGHIJ.
– Jedno porównanie i 0 zamian w każdej iteracji. Razem, N-1
porównań i brak zamian.
109
Shellsort – pomysł
Modyfikacja (rozszerzona wersja) sortowania przez wstawianie
Dążymy do zmniejszenia ilości zamian – albo ciągi krótkie, albo
lepsze („bliższe” posortowania).
Shellsort wykonuje sortowanie podciągów:
– Wybieramy ciąg liczb (zwany ciągiem przyrostów) h
t
, … , h
2
, h
1
;
– h
1
=1; h
t
> … > h
2
>h
1
;
– Sortujemy ciągi elementów odległych o h
t
, h
t-1
, h
t-2
,…,h
1
.
110
Shellsort – kod w C
void shellsort (int[ ] a, int n)
{
int i, j, k, h, v;
int[ ] cols = {1391376, 463792, 198768, 86961, 33936, 13776, 4592, 1968, 861,
336, 112, 48, 21, 7, 3, 1}
for (k=0; k<16; k++)
{
h=cols[k];
for (i=h; i<n; i++)
{
v=a[i];
j=i;
while (j>=h && a[j-h]>v)
{
a[j]=a[j-h];
j=j-h;
}
a[j]=v;
}
}
}
111
Shellsort – przykład
ciąg: EASYQUESTION (12 znaków)
ciąg przyrostów 4, 1.
porównań
zamian
EASYQUESTION
E
ASY
Q
UES
T
ION
2
0
E
A
SY
Q
I
ES
T
U
ON
3
1
E
A
E
Y
Q
I
O
S
T
U
S
N
3
2
E
A
E
N
Q
I
O
S
T
U
S
Y
3
3
Razem w tej fazie
11
6
faza 1: przyrost = 4
112
Shellsort – przykład
porównań
zamian
EAENQIOSTUSY
AE
ENQIOSTUSY
1
1
AEE
NQIOSTUSY
1
0
AEEN
QIOSTUSY
1
0
AEENQ
IOSTUSY
1
0
AEEINQ
OSTUSY
3
2
AEEINOQ
STUSY
2
1
AEEINOQS
TUSY
1
0
AEEINOQST
USY
1
0
AEEINOQSTU
SY
1
0
AEEINOQSSTU
Y
3
2
AEEINOQSSTUY
1
0
Razem w tej fazie
16
6
faza 2: przyrost= 1
113
Shellsort – przykład
Razem 27 porównań i 12 zamian.
Dla sortowania przez wstawiania odpowiednio 41 i 31 !!!
– Polepszenie dostajemy przez wstępne posortowanie, krótkich
podciągów
Zwykle stosuje się ciągi przyrostów o więcej niż 2 elementach.
114
Shellsort – czas działania
Nie ma możliwości przeprowadzenie dokładnej analizy dla przypadki
ogólnego (wyniki są oparte o badania empiryczne).
Wybór ciągu przyrostów ma zasadniczy wpływ na czas sortowania.
– Dla ciągu podanego przez Shell’a: O(N
2
)
• I
max
= Floor(N/2), I
k
= Floor(I
k+1
/2).
• np N=64:1, 2, 4, 8, 16, 32
– Dla ciągu podanego przez Knuth’a: O(N
3/2
)
• I
1
=1, I
k+1
= 1+3*I
k
.
• 1, 4, 13, 40, 121, 364, …
115
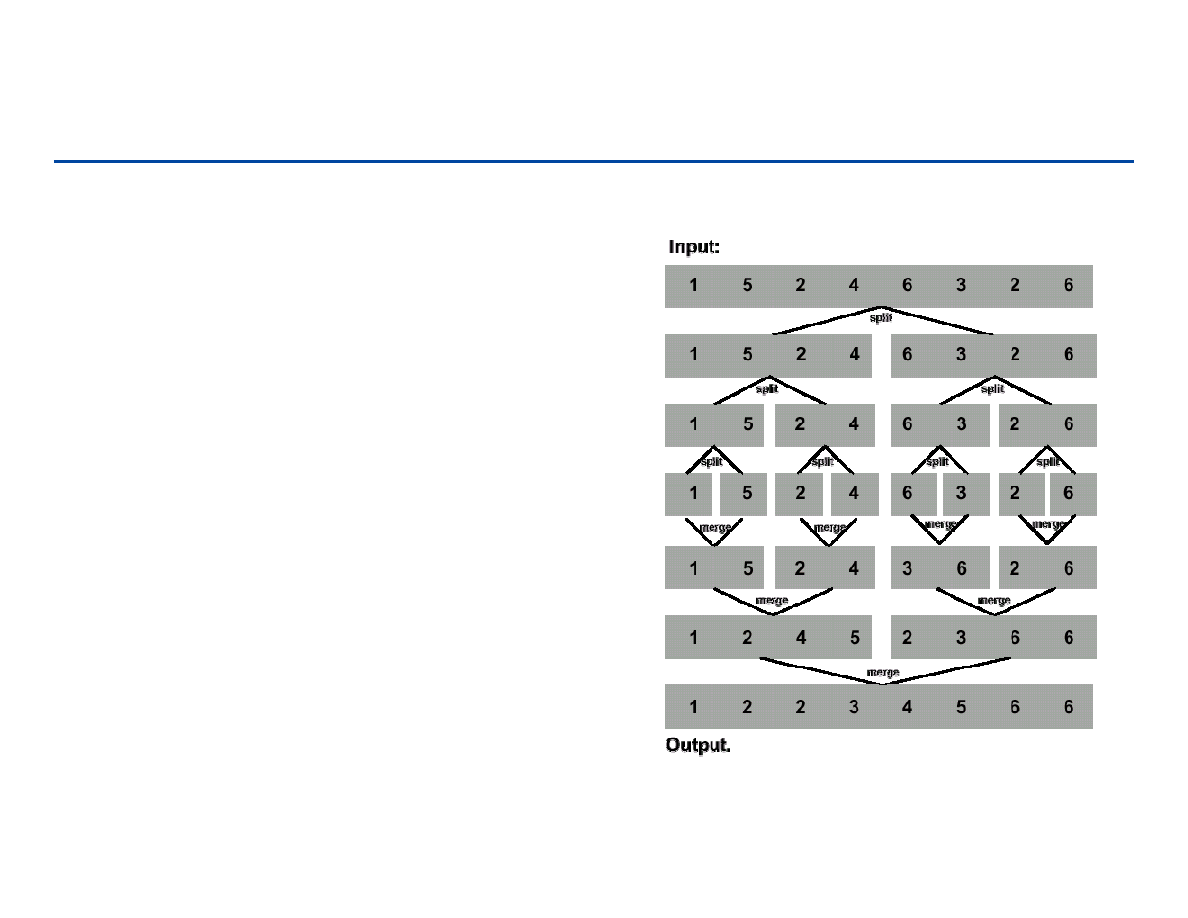
Mergesort – pomysł
Dzielimy ciąg na podciągi, sortujemy te podciągi, a następnie
łączymy zachowując porządek.
– Przykład algorytmu typu „dziel i zwyciężaj”.
– Potrzeba dodatkowego miejsca dla tych podciągów – nie jest to
sortowanie „w miejscu”.
• Można realizować ten proces „w miejscu”, ale rośnie stopień
komplikacji.
116
Mergesort – przykład
ciąg: EASYQUESTION (12 znaków)
EASYQUESTION
EASYQU
ESTION
EAS
YQU
EST
ION
E
AS
Y
QU
E
ST
I
ON
A S
Q U
S T
O N
podział
117
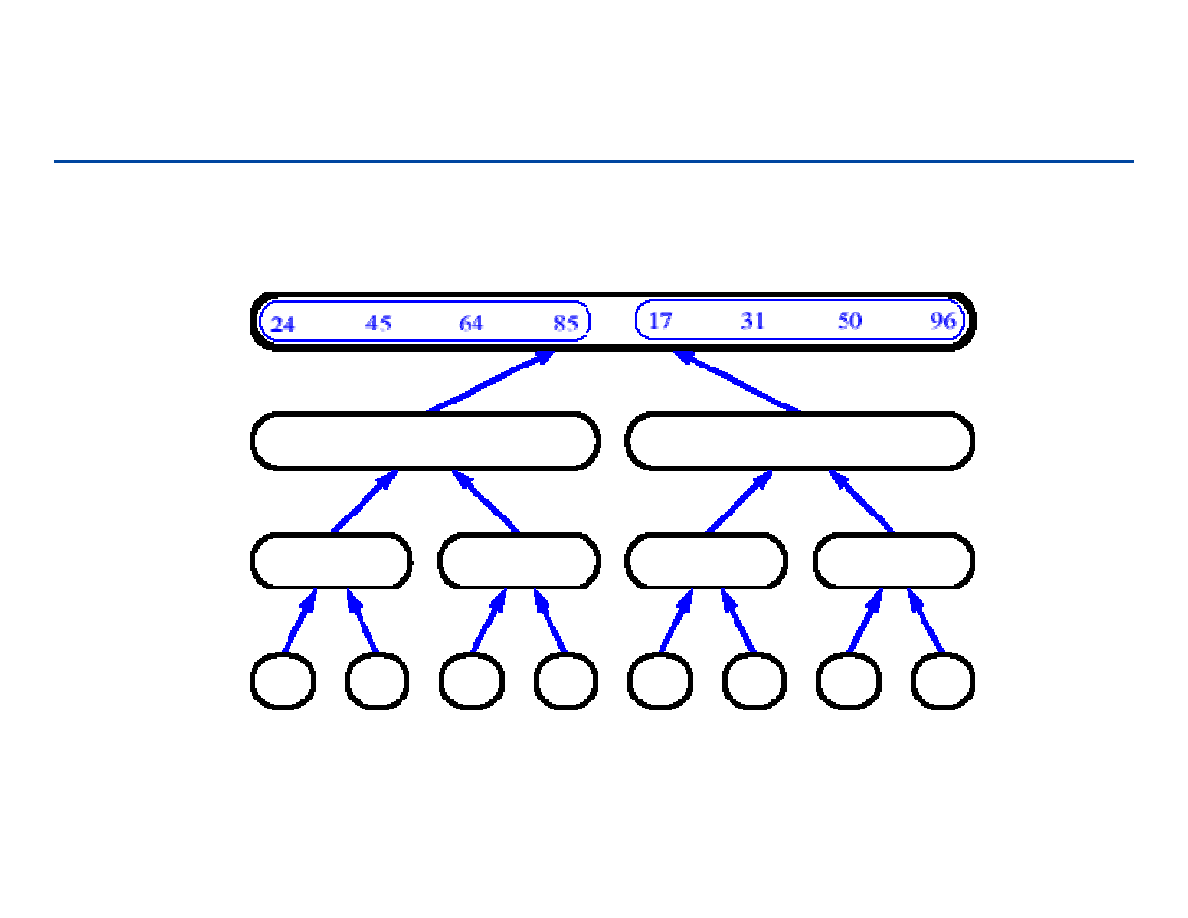
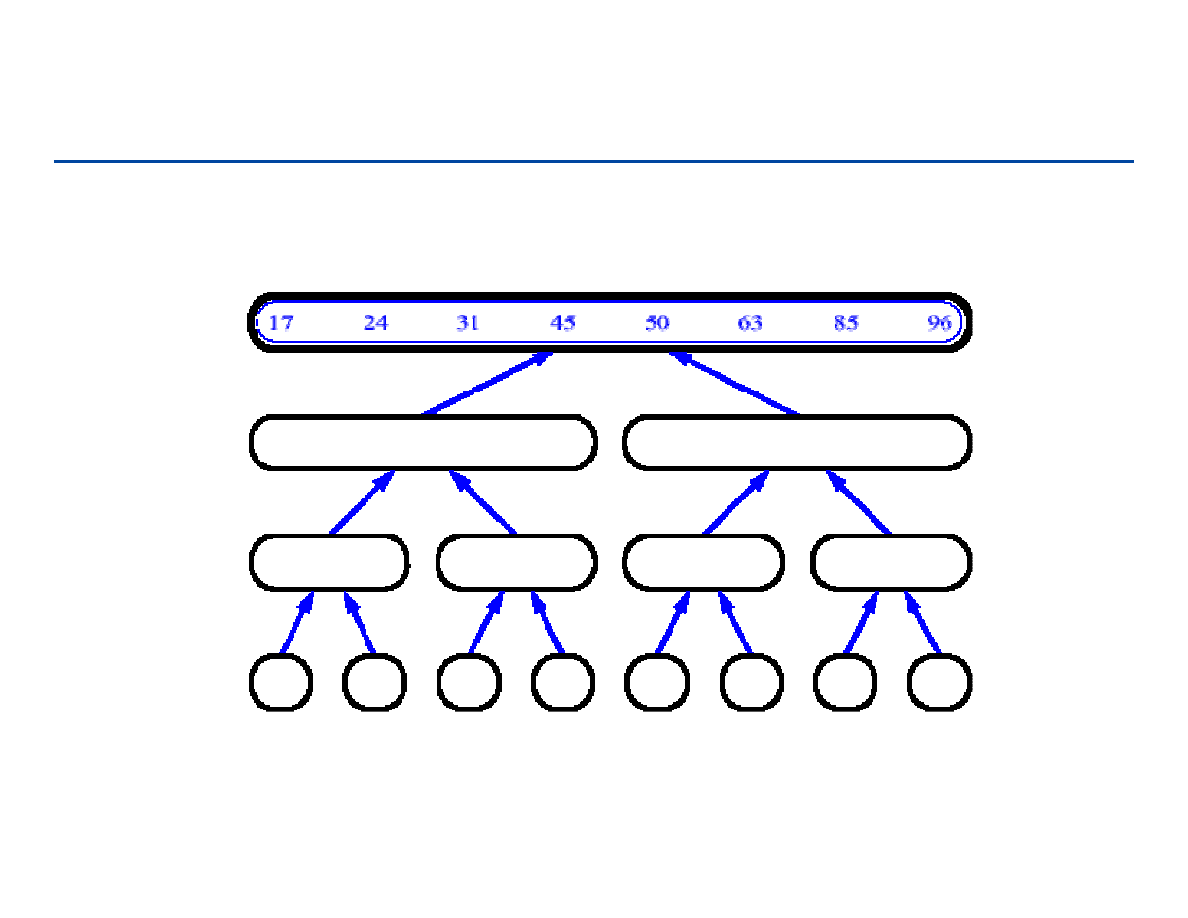
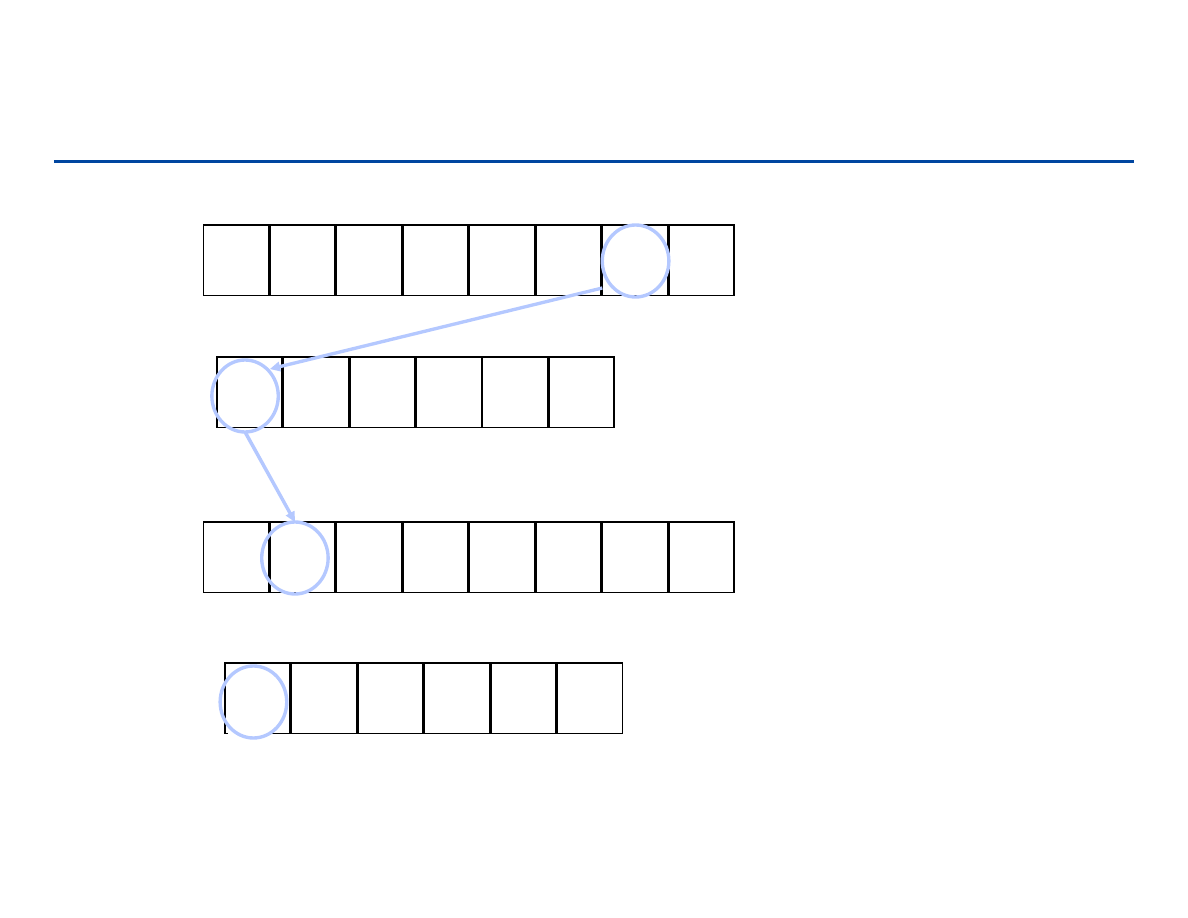
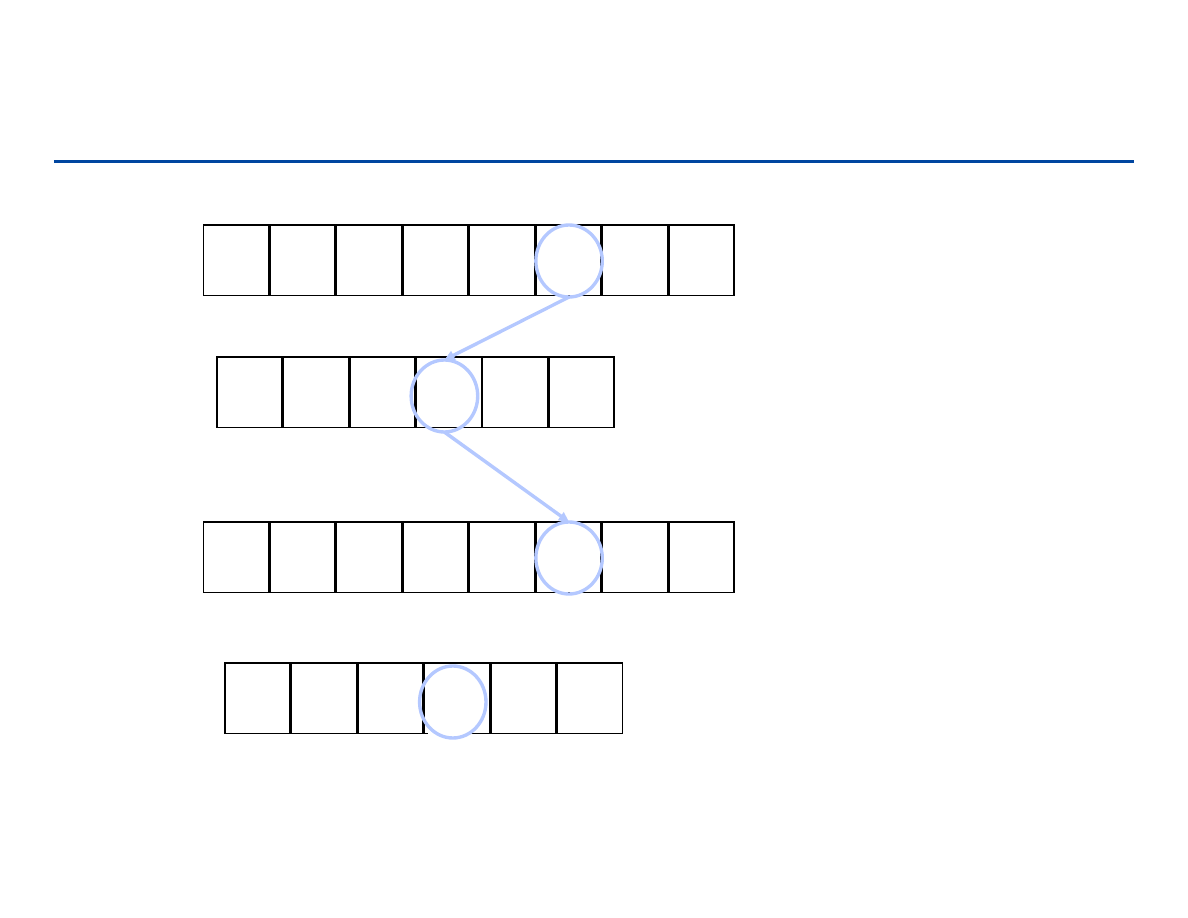
Mergesort – przykład
AEEINOQSSTUY
AEQSUY
EINOST
AES
QUY
EST
INO
E
AS
Y
QU
E
ST
I
NO
A S
Q U
S T
O N
łaczenie
A E S
Q U Y
C1
C2
C3
118
Mergesort - pseudokod
MERGE-SORT(A, p, r)
1
if p < r
2
then q ← (p + r)/2
3
MERGE-SORT(A, p, q)
4
MERGE-SORT(A, q + 1, r)
5
MERGE(A, p, q, r)
119
Mergesort - pseudokod
MERGE(A, p, q, r)
1 n1 ← q - p + 1
2 n2 ← r - q
3 create arrays L[1 ..n1 + 1] and R[1 ..n2 + 1]
4
for i ← 1 to n1
5
do L[i] ← A[p + i - 1]
6
for j ← 1 to n2
7
do R[j] ← A[q + j]
8 L[n1 + 1] ← ∞
9 R[n2 + 1] ← ∞
10 i ← 1
11 j ← 1
12
for k ← p to r
13
do if L[i] ≤ R[j]
14
then A[k] ← L[i]
15
i ← i + 1
16
else A[k] ← R[j]
17
j ← j + 1

120
Sortowanie w czasie liniowym
121
Przegląd
Czy możliwe jest sortowanie w czasie lepszym niż dla metod
porównujących elementy (poprzednio – najlepsze algorytmy dawały
czas O(NlogN))?
Algorytmy o liniowym czasie działania:
– Przez zliczanie (Counting-Sort)
– Radix-Sort
– Kubełkowe (Bucket-sort)
Potrzeba dodatkowych założeń!
122
Sortowanie o czasie liniowym
Możliwe przy dodatkowych informacjach (założeniach) o danych
wejściowych.
Przykłady takich założeń:
– Dane są liczbami całkowitymi z przedziału [0..k] i k = O(n).
– Dane są liczbami wymiernymi z przedziału [0,1) o rozkładzie
jednostajnym na tym przedziale
Trzy algorytmy:
– Counting-Sort
– Radix-Sort
– Bucket-Sort
123
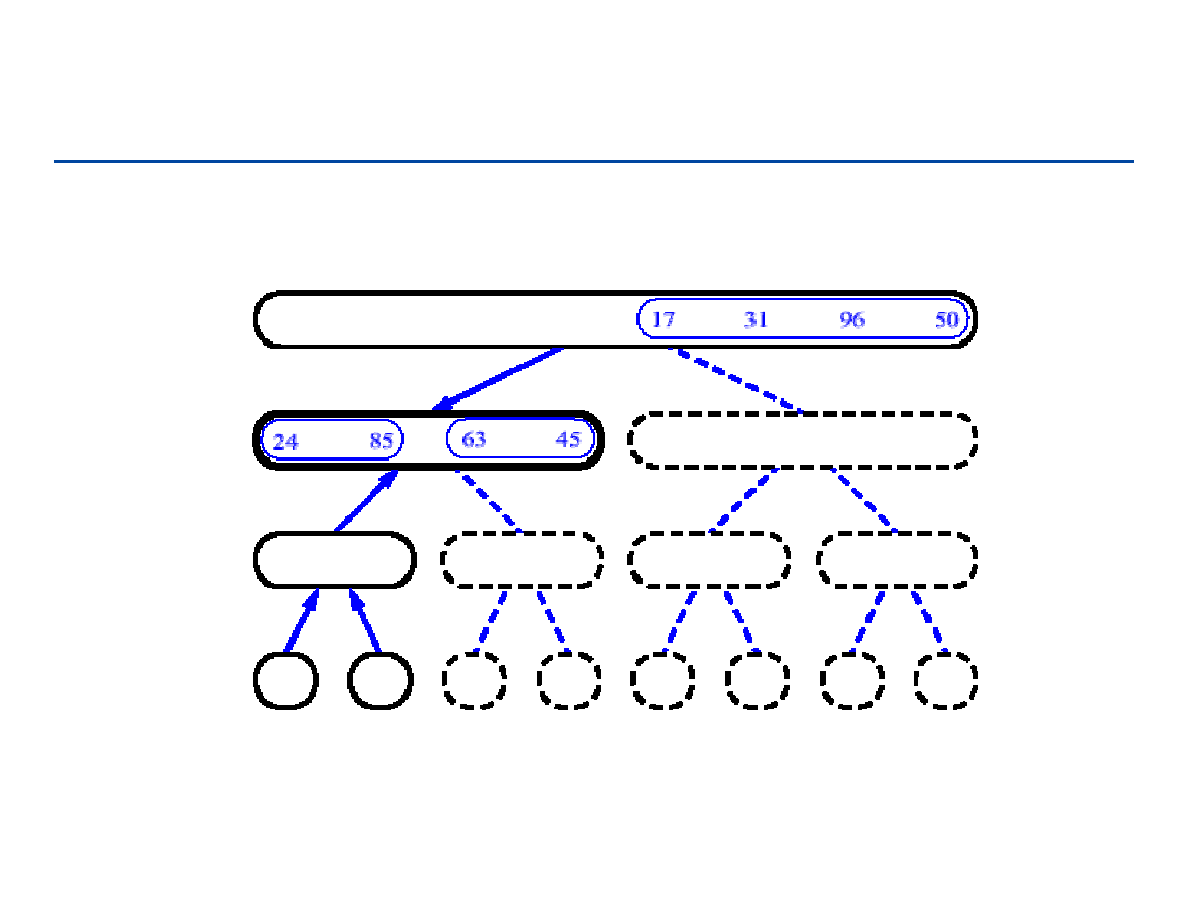
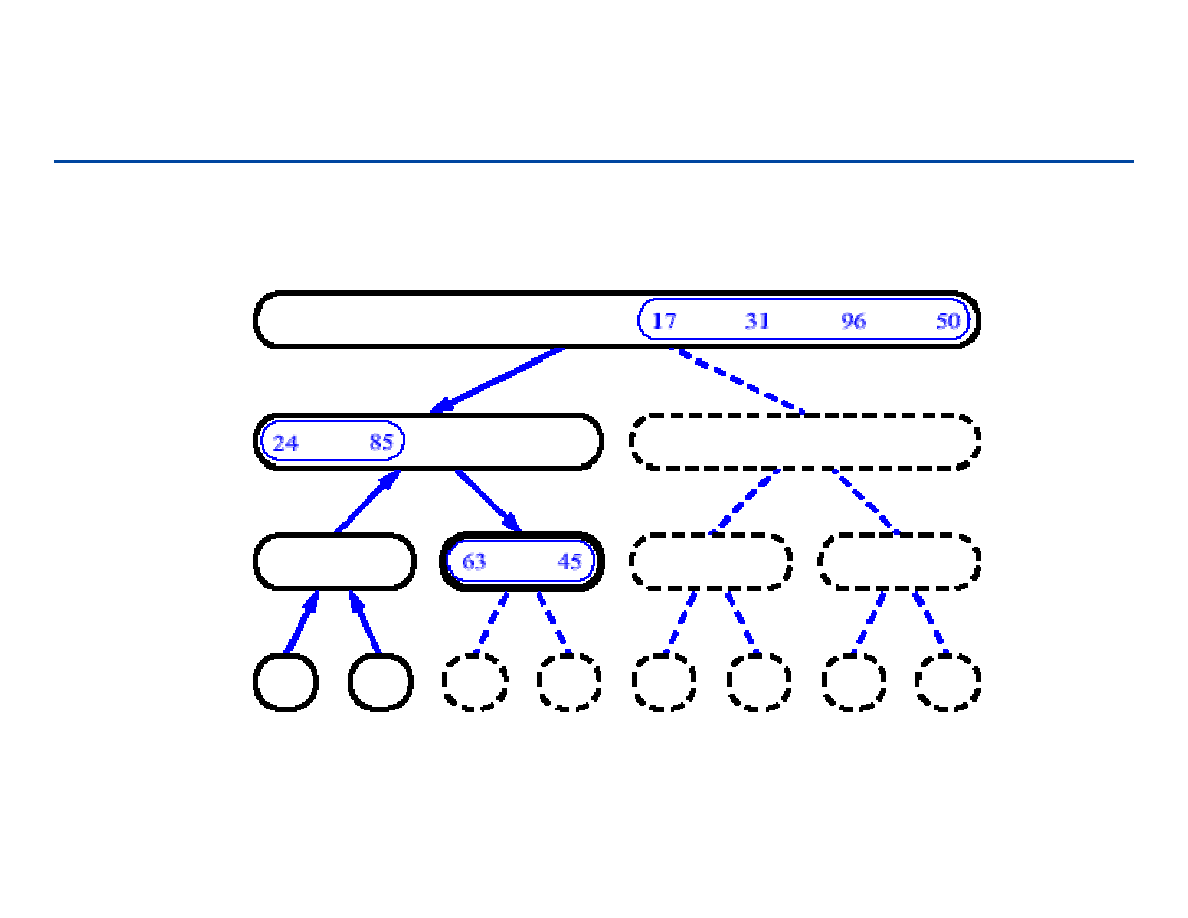
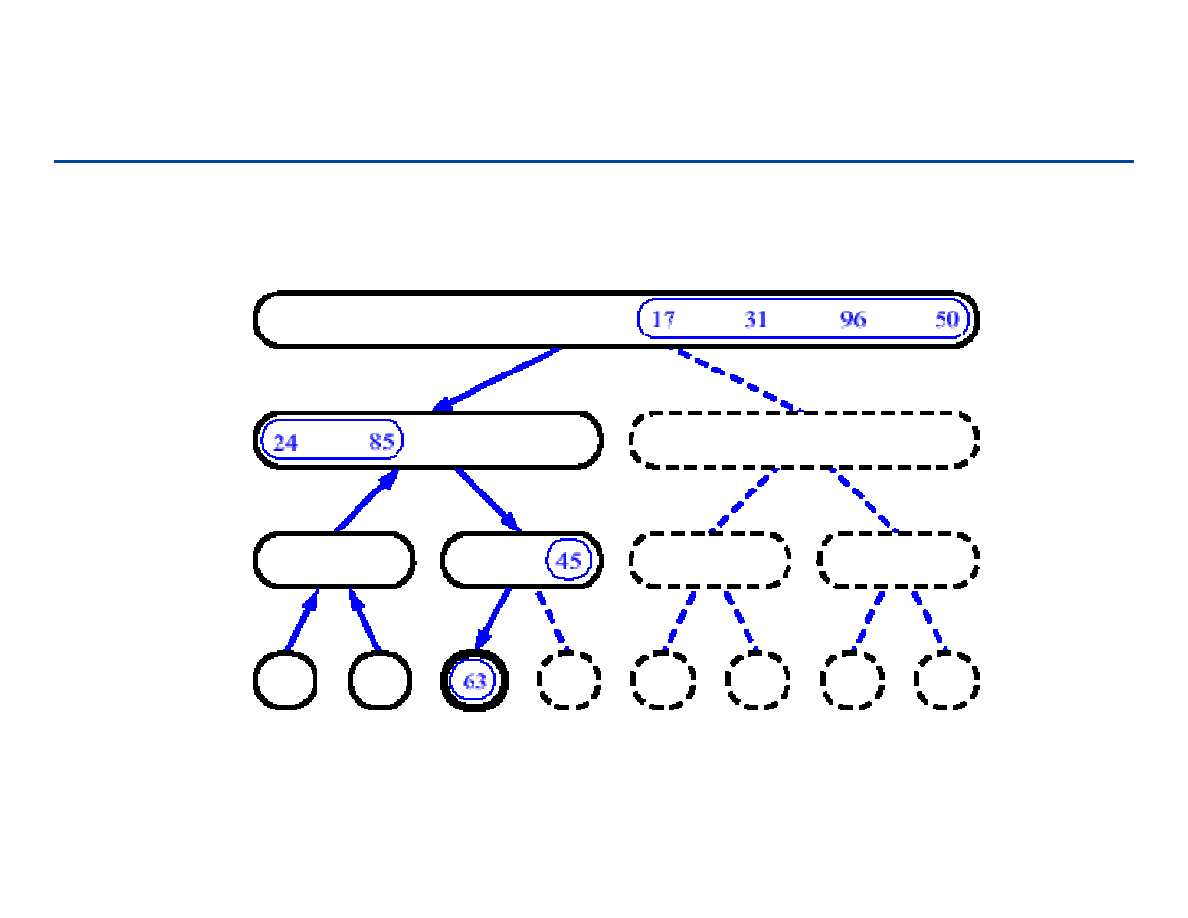
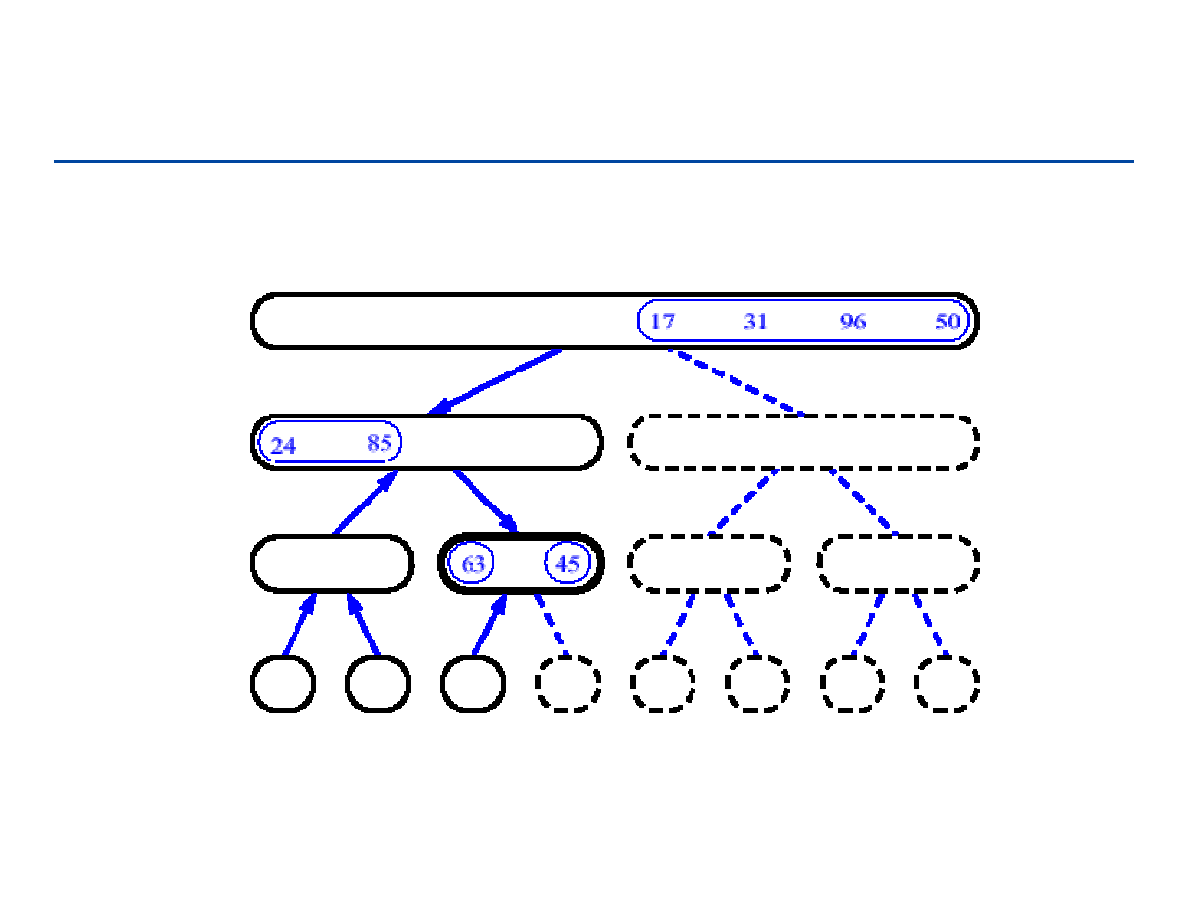
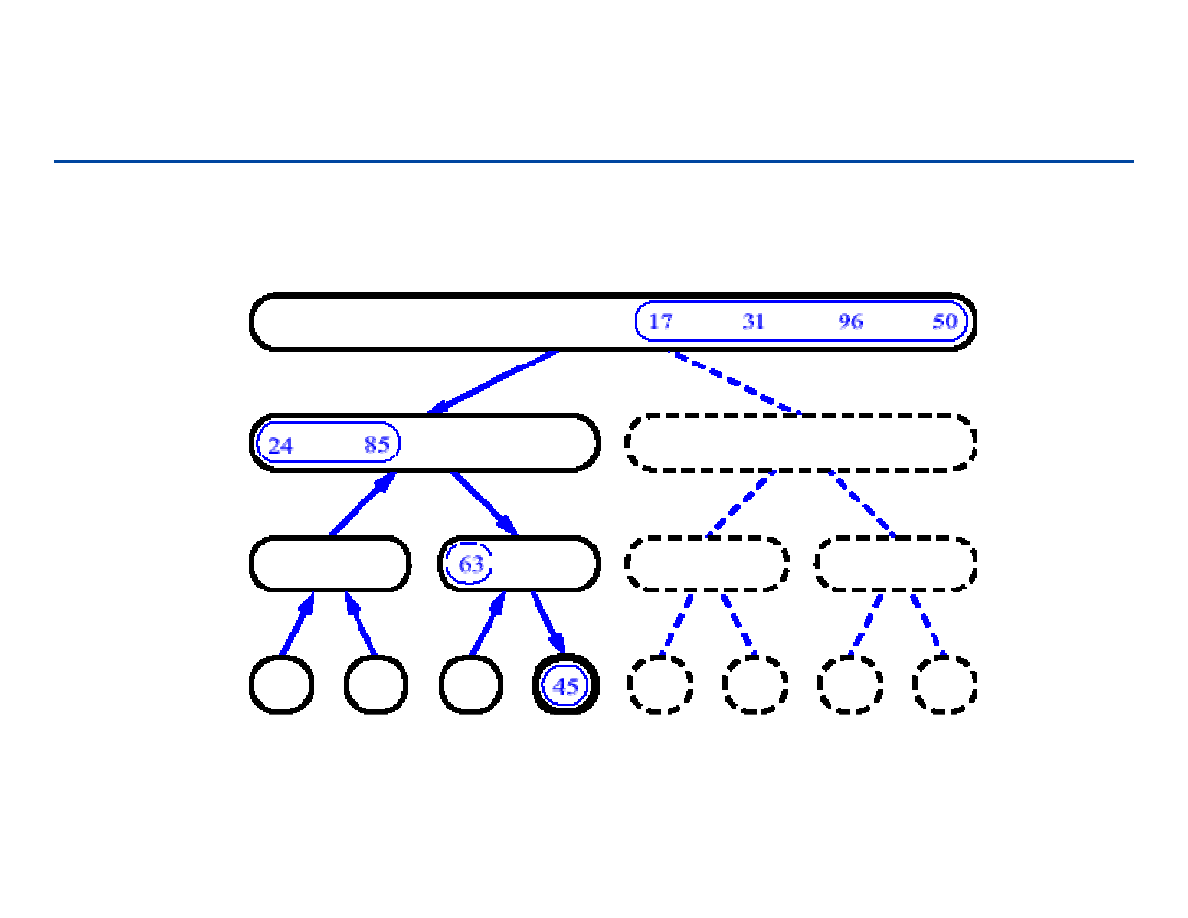
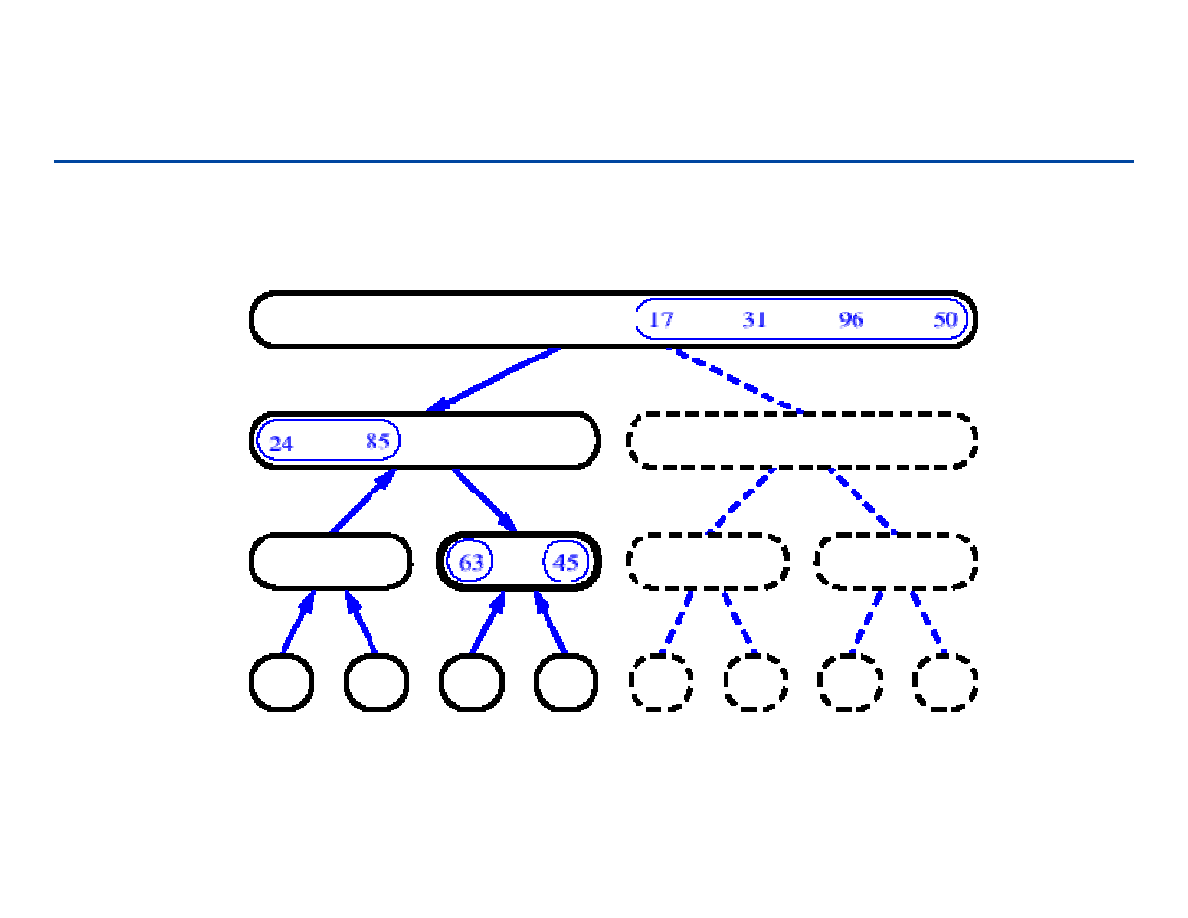
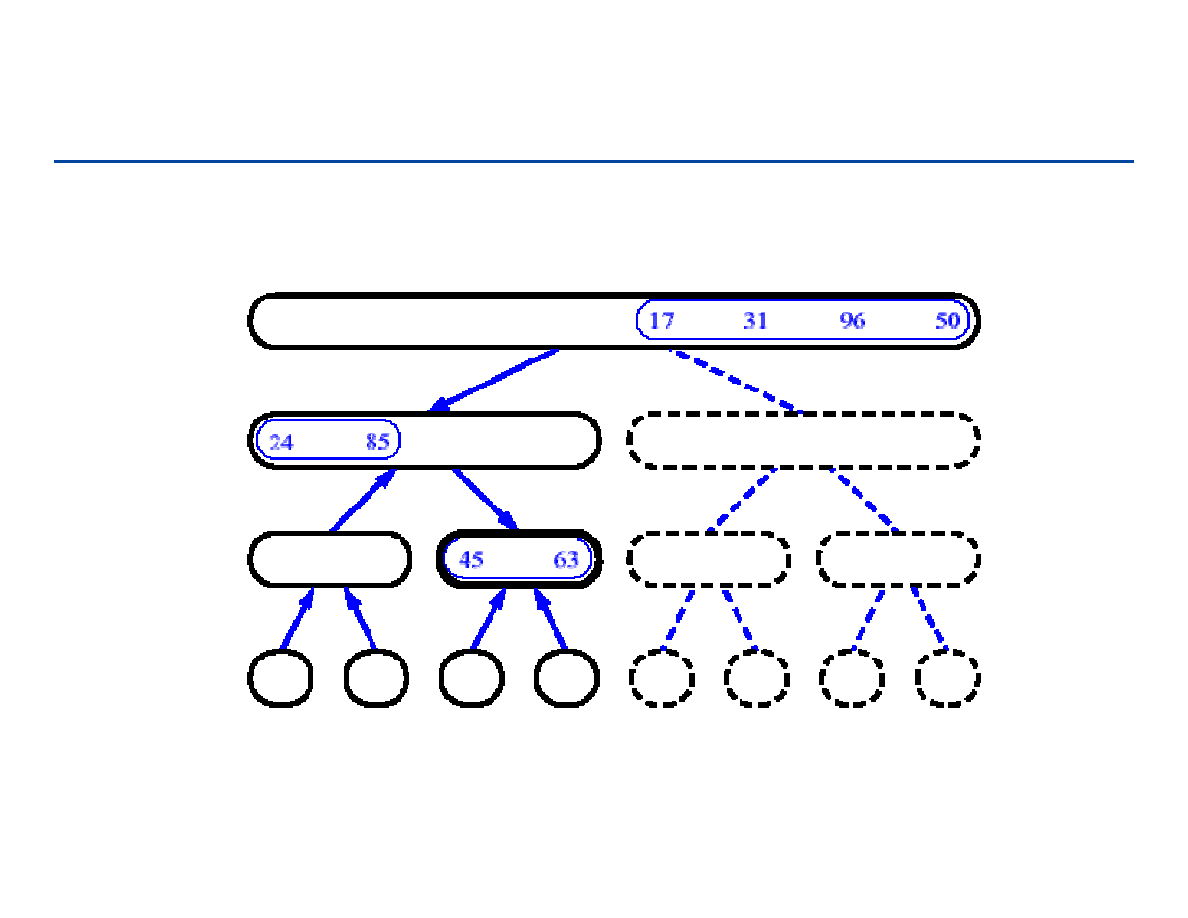
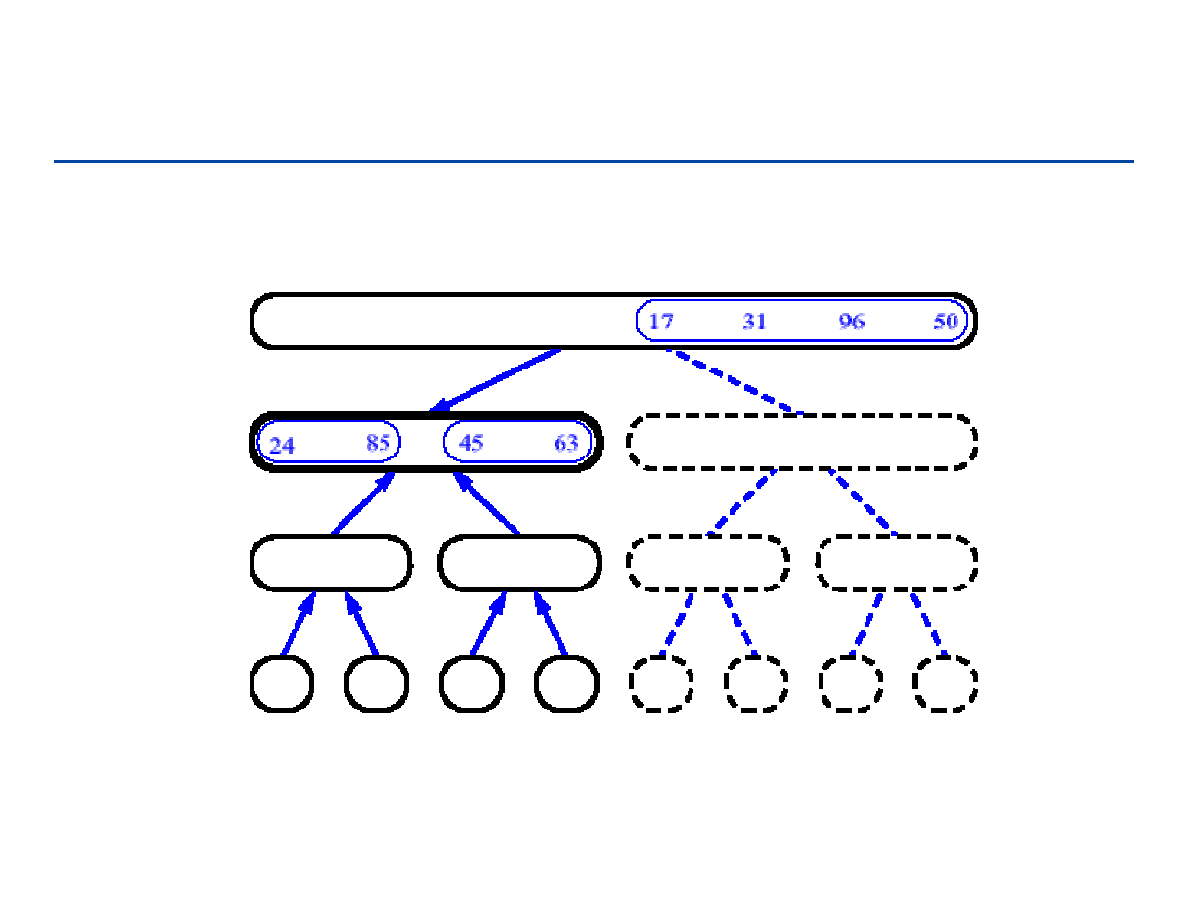
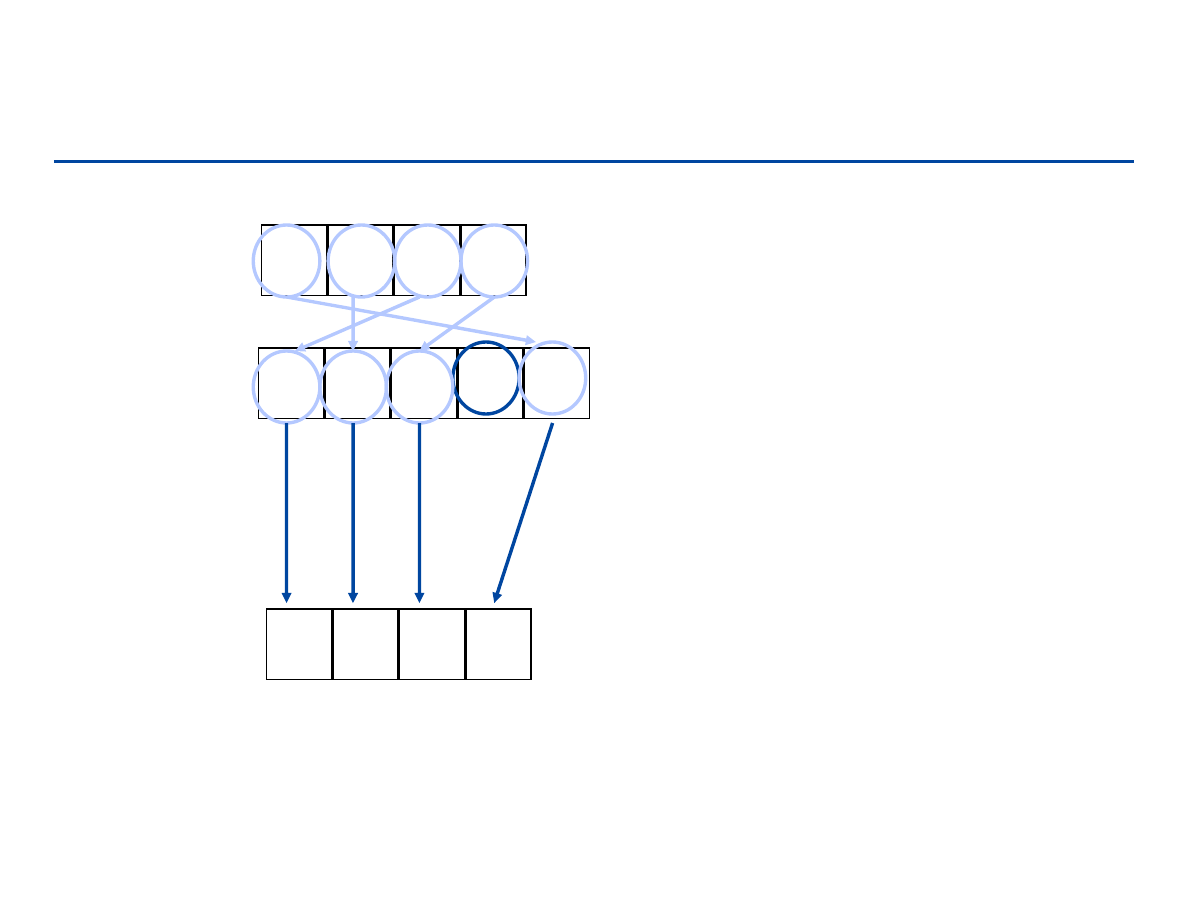
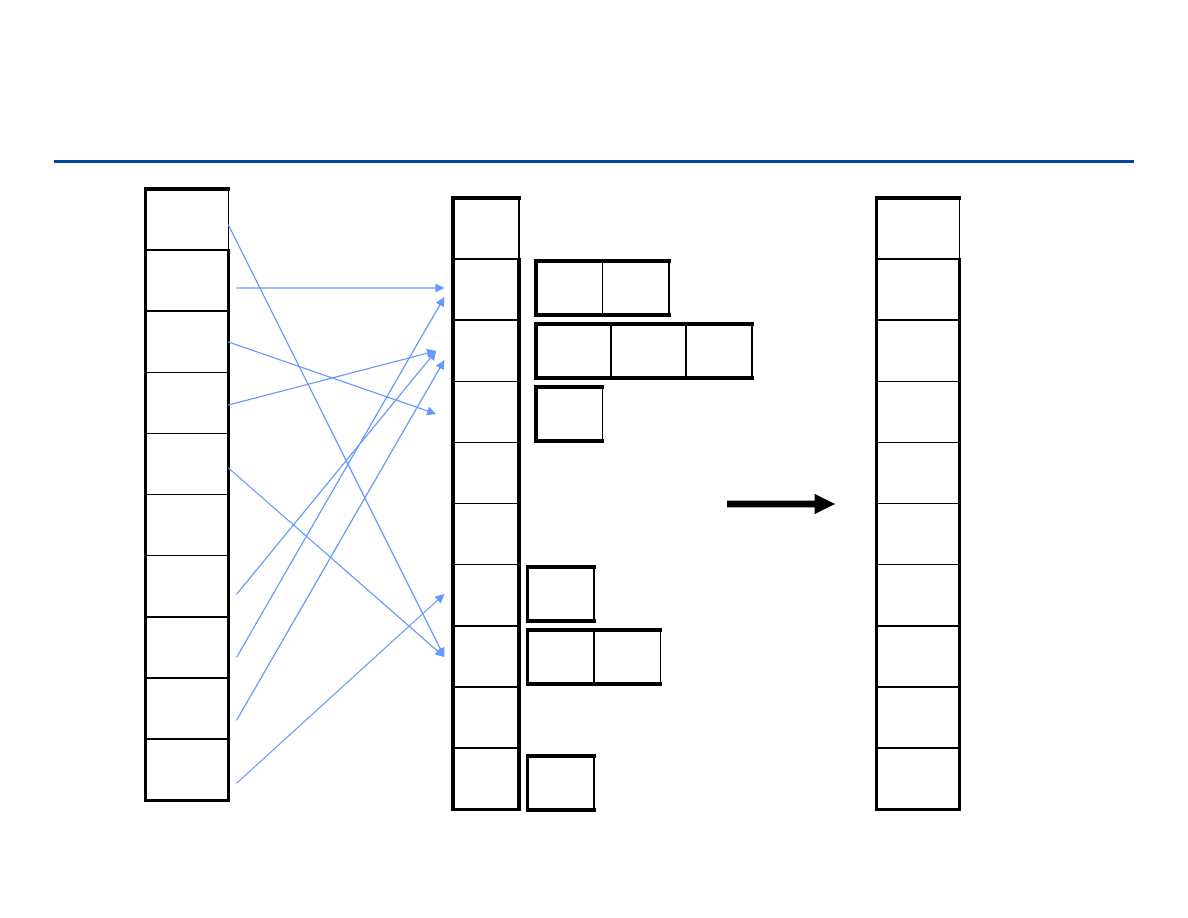
Zliczanie (Counting sort)
wejście: n liczb całkowitych z przedziału [0..k], dla k = O(n).
pomysł: dla każdego elementu wejścia x określamy jego pozycje (rank):
ilość elementów mniejszych od x.
jeśli znamy pozycję elementu – umieszczamy go na r+1 miejscu ciągu
przykład: jeśli wiemy, że w ciągu jest 6 elementów mniejszych od 17, to 17
znajdzie się na 7 miejscu w ciągu wynikowym.
powtórzenia: jeśli mamy kilka równych elementów umieszczamy je kolejno
poczynając od indeksu pozycja
124
Zliczanie (Counting sort)
1
3
2
4
5
Jeśli nie ma powtórzeń i n = k,
Rank[A[i]] = A[i] i B[Rank[A[i]] A[i]
Dla każdego A[i], liczymy elementy
≤
od niego. Daje to rank (pozycję)
elementu
4
1
2
5
A =
B =
Rank =
4
3
5
2
1
3
125
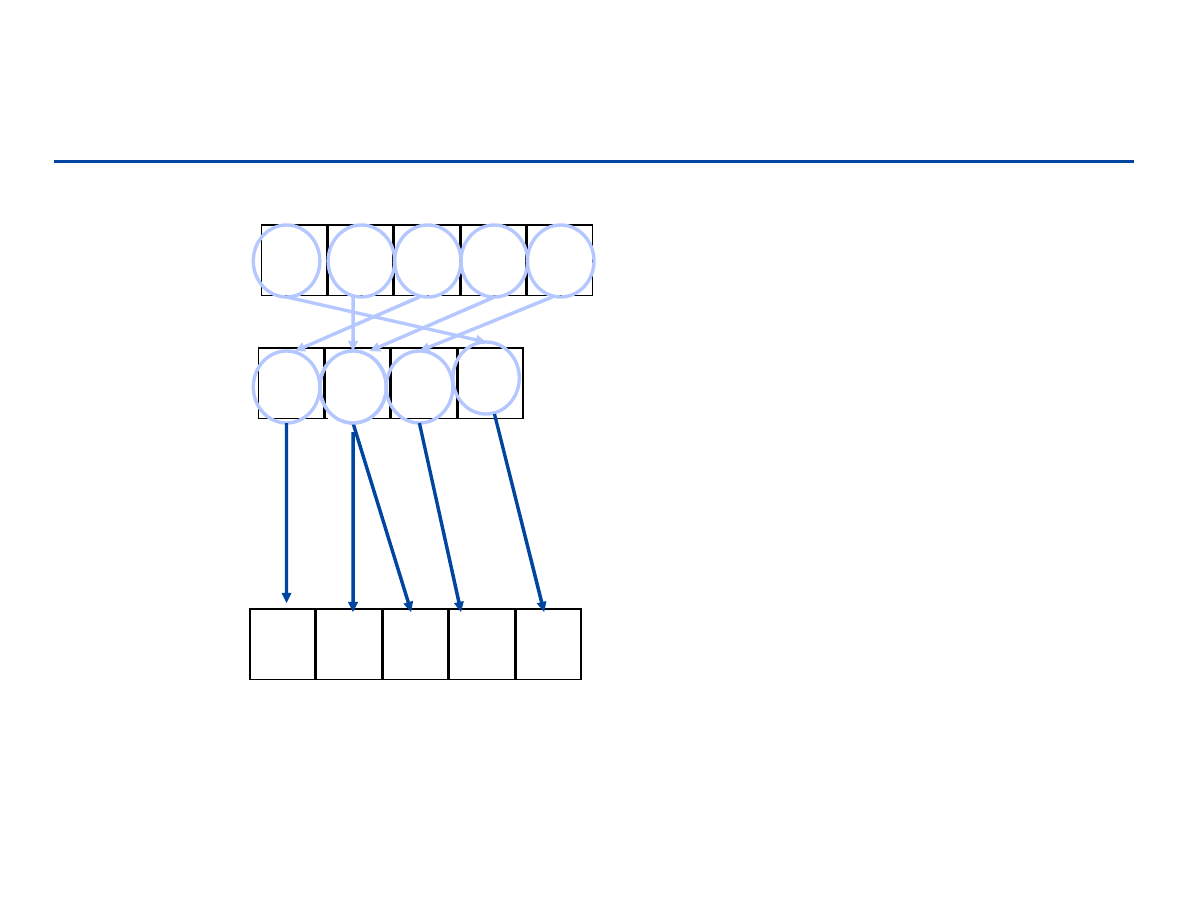
Zliczanie (Counting sort)
5
1
2
3
A =
3
2
4
Rank =
Jeśli nie ma powtórzeń i n < k
,
Niektóre komórki tablicy rank
pozostają niewykorzystane, ale
algorytm działa.
B =
5
2
1
1
3
126
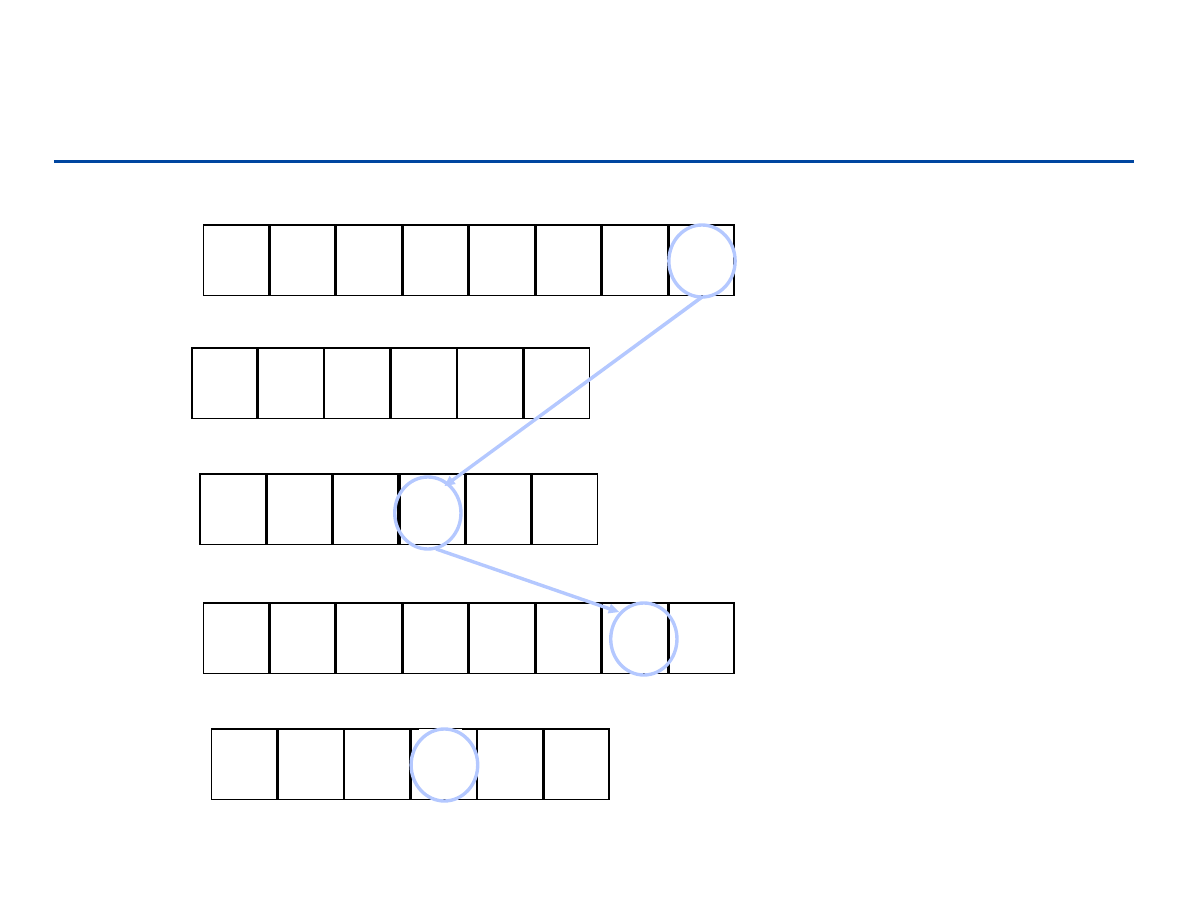
Zliczanie (Counting sort)
4
1
2
2
A =
1
4
3
5
Rank =
Jeśli n > k i mamy powtórzenia,
umieszczamy na wyjściu
powtarzające się elementy w
takiej kolejności, w jakiej
występowały w oryginalnym
ciągu (stabilność)
B =
3
3
4
2
1
2
2
127
Zliczanie (Counting sort)
Counting-Sort(A, B, k)
1.
for i 0 to k
2.
do C[i] 0
3.
for j
1 to length[A]
4.
do C[A[j]] C[A[j]] +1
5.
/* C zawiera ilości elementów równych i
6.
for i 1 to k
7.
do C[i] C[i] + C[i –1]
8.
/* C zawiera ilości elementów ≤ i
9.
for j length[A] downto 1
10.
do B[C[A[j]]] A[j]
11.
C[A[j]] C[A[j]] – 1
A[1..n] – tablica wejściowa
B [1..n] – tablica wyjściowa
C [0..k] – pomocnicza tablica (do zliczania)
128
Sortowanie przez zliczanie – przykład (1)
n = 8
k = 6
B[C[A[j]]] A[j]
C[A[j]] C[A[j]] – 1
po p. 11
C[A[j]] C[A[j]] +1
po p.4
C =
0 1 2 3 4 5
2
2
0
3
0
1
2
3
5
0
2
3
0
3
A =
1 2 3 4 5 6 7 8
2
4
2
7
7
8
C =
0 1 2 3 4 5
C[i] C[i] + C[i –1]
po p. 7
2
4
2
7
8
C =
0 1 2 3 4 5
7
1 2 3 4 5 6 7 8
B =
3
6
129
Sortowanie przez zliczanie – przykład (2)
0
3
B =
2
4
2
6
7
8
C =
0 1 2 3 4 5
1 2 3 4 5 6 7 8
2
3
5
0
2
3
0
3
A =
1 2 3 4 5 6 7 8
2
4
2
6
7
8
C =
0 1 2 3 4 5
1
130
Sortowanie przez zliczanie – przykład (3)
0
3
B =
1
4
2
6
7
8
C =
0 1 2 3 4 5
1 2 3 4 5 6 7 8
2
3
5
0
2
3
0
3
A =
1 2 3 4 5 6 7 8
2
4
2
6
7
8
C =
0 1 2 3 4 5
3
5
131
Counting sort – czas działania
Pętla for w p.1-2 zajmuje czas Θ(k)
Pętla for w p.3-4 zajmuje czas Θ(n)
Pętla for w p.6-7 zajmuje czas Θ(k)
Pętla for w p.9-11 zajmuje czas Θ(n)
Stąd dostajemy łączny czas Θ(n+k)
Ponieważ k = O(n), T(n) = Θ(n)
algorytm jest optymalny!!
Konieczne jest założenie k = O(n). Jeśli k >> n to potrzeba to
potrzeba dużej ilości pamięci.
Nie jest to sortowanie „w miejscu”.
132
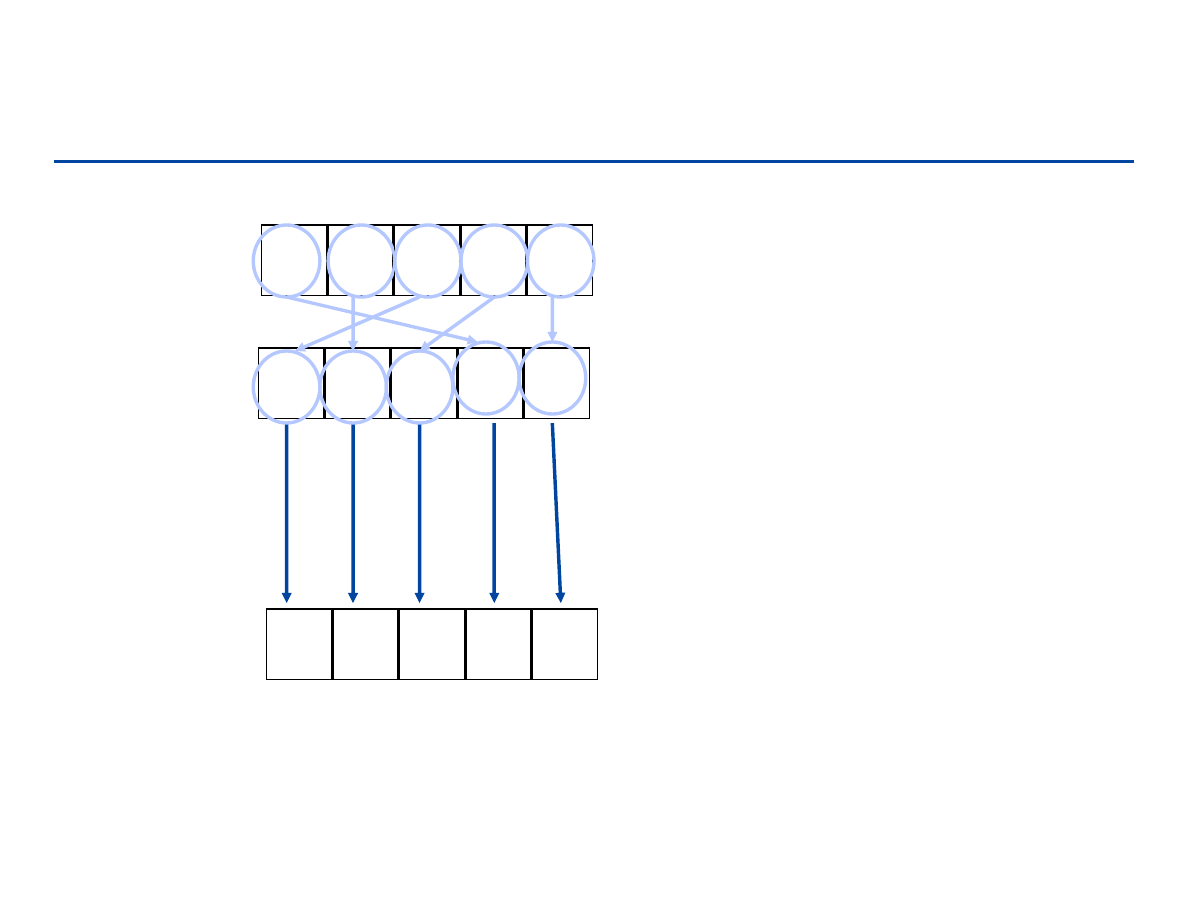
Radix sort – sortowanie pozycyjne
wejście: n liczb całkowitych, d-cyfrowych, łańcuchów o d-pozycjach
pomysł: zajmować się tylko jedną z cyfr (sortować względem kolejnych
pozycji – cyfr/znaków). Zaczynamy od najmniej znaczącej
cyfry/znaku, potem kolejne pozycje (cyfry/znaki), aż do najbardziej
znaczącej. Musimy stosować metodą stabilną. Ponieważ zbiór
możliwych wartości jest mały (cyfry – 0-9, znaki ‘a’-’z’) możemy
zastosować metodę zliczania, o czasie O(n)
Po zakończeniu ciąg będzie posortowany!!
133
Radix sort – przykład
6 5 7
4 5 7
3 5 5
8 3 9
4 3 6
3 2 9
7 2 0
3 5 5
7 2 0
4 3 6
8 3 9
6 5 7
4 5 7
3 2 9
8 3 9
3 2 9
6 5 7
4 5 7
4 3 6
3 5 5
7 2 0
8 3 9
7 2 0
6 5 7
4 5 7
4 3 6
3 5 5
3 2 9
134
Radix-Sort – pseudokod
Radix-Sort(A, d)
1.
for i 1 to d
2.
do zastosuj stabilną metodę sortowania do cyfry d dla tablicy A
uwagi:
•
złożoność: T(n) = Θ(d(n+k)) Θ(n) dla stałego d i k = O(1)
•
wartości cyfr/znaków są z zakresu [0..k –1] dla k = O(1)
•
Metoda stosowana dla poszczególnych pozycji musi być stabilna!
135
Sortowanie kubełkowe – Bucket sort
wejście: n liczb rzeczywistych z przedziału [0..1) ważne jest, aby były
równomiernie rozłożone (każda wartość równie prawdopodobna)
pomysł: dzielimy przedział [0..1) na n podprzedziałów („kubełków”):0, 1/n,
2/n. … (n–1)/n. Elementy do odpowiednich kubełków, a
i
: 1/i ≤ a
i
≤
1/(i+1).
Ponieważ rozkład jest równomierny to w żadnym z przedziałów nie
powinno znaleźć się zbyt wiele wartości. Jeśli wkładamy je do kubełków
zachowując porządek (np. przez wstawianie – Insertion-Sort),
dostaniemy posortowany ciąg.
136
Bucket sort – przykład
. 21
.12
.23
.68
.94
.72
.26
.39
.17
.78
7
6
8
9
5
4
3
2
1
0
.17
.12
.26
.23
.21
.39
.68
.78
.72
.94
.68
.72
.78
.94
.39
.26
.23
.21
.17
.12
137
Bucket-Sort
Bucket-Sort(A)
1.
n length(A)
2.
for i 0 to n
3.
do wstaw A[i] do listy B[floor(nA[i])]
4.
for i 0 to n –1
5.
do Insertion-Sort(B[i])
6.
Połącz listy B[0], B[1], … B[n –1]
A[i] tablica wejściowa
B[0], B[1], … B[n –1] lista „kubełków”
138
Bucket-Sort – złożoność czasowa
Wszystkie instrukcje z wyjątkiem 5 (Insertion-Sort) wymagają czasu O(n),
w przypadku pesymistycznym.
W przypadku pesymistycznym, O(n) liczb trafi do jednego „kubełka” czyli
ich sortowanie zajmie czas O(n
2
).
Jednak w średnim przypadku stała ilość elementów wpada do jednego
przedziału – stąd czas średni wyniesie O(n).

139
Sortowanie
Quicksort i Heapsort
140
Sortowanie - zadanie
Definicja (dla liczb):
wejście: ciąg n liczb A = (a
1
, a
2
, …, a
n
)
wyjście: permutacja (a
1
,…, a’
n
) taka, że a’
1
≤
… ≤ a’
n
141
Zestawienie czasów działania
Przez wybór: O(N
2
) zawsze
Bąbelkowe: O(N
2
) najgorszy przypadek; O(N) najlepszy przyp.
Wstawianie: O(N
2
) średnio; O(N) najlepszy przypadek
Shellsort:
O(N
4/3
)
Heapsort:
O(NlogN) zawsze
Mergesort:
O(NlogN) zawsze
Quicksort:
O(NlogN) średnio; O(N
2
) najgorszy przypadek
Zliczanie:
O(N) zawsze
Radix sort:
O(N) zawsze
zewnętrzne: O(b logb)) dla pliku o b „stronach”.
142
Dzisiaj:
Dwa algorytmy sortowania:
Quicksort
– Bardzo popularny algorytm, bardzo szybki w średnim przypadku
Heapsort
– Wykorzystuje strukturę kopca (heap)
143
Sortowanie szybkie (Quick Sort) - pomysł
Jest to najszybszy w praktyce algorytm sortowania, pozwala na
efektywne implementacje.
– średnio: O(NlogN)
– najgorzej O(N
2
), przypadek bardzo mało prawdopodobny.
Procedura:
– Wybieramy element osiowy (pivot ).
– Dzielimy ciąg na dwa podciągi: elementów mniejszych lub równych
od osiowego oraz elementów większych od osiowego. Powtarzamy
takie postępowanie, aż osiągniemy ciąg o długości 1.
– Algorytm typu – „dziel i zwyciężaj”.
– Jest to metoda sortowania w miejscu (podobnie jak Insert-sort,
przeciwnie do np. Merge-sort), czyli nie wymaga dodatkowej
pamięci
144
Quicksort – algorytm
QUICKSORT(A, p, r)
1
if p < r
2
then q ← PARTITION(A, p, r)
3 QUICKSORT(A, p, q - 1)
4 QUICKSORT(A, q + 1, r)
Problemy:
1.
Wybór elementu osiowego;
2.
Podział (partition).
145
Quicksort – podział
Funkcja partition dzieli ciąg na dwa podciągi: elementów
mniejszych (bądź równych) od osiowego i większych od niego
{a[j] | a[j] <= a[i]
dla j ∈[left, i-1]}
{a[k] | a[k] > a[i]
dla k ∈[i+1,right]}
a[i]
wynik
quicksort(a, left, i-1)
wynik
quicksort(a, i+1, right)
Po podziale:
El. osiowy
146
Quicksort – przykład podziału
ciąg: EASYQUESTION (12 znaków).
El. osiowy: N
E A S Y Q U E S T I O N
Przeglądaj aż: a[i] > a[right]
Przeglądaj aż:
a[j] <= a[right]
i
j
Swap(a[i], a[j])
E A
I
Y Q U E S T
S
O N
i
j
Swap(a[i], a[j])
E A
I
E
Q U
Y
S T
S
O N
i
j
Swap(a[i], a[right])
(indeksy i oraz j „minęły” się)
E A
I
E
N
U
Y
S T
S
O
Q
Lewy podciąg
Prawy podciąg
147
Quicksort – wybór elementu osiowego
opcja 1: zawsze wybierać skrajny element (pierwszy lub ostatni).
– Zalety: szybkość;
– Wady: jeśli trafimy na najmniejszy (największy) element podział nie
redukuje istotnie problemu.
opcja 2: wybieramy losowo.
– Zalety: średnio powinno działać dobrze (podział na podciągi o
zbliżonej długości);
– Wady: czasochłonne i nie gwarantuje sukcesu.
opcja 3: wybieramy medianę z pierwszych/ostatnich/środkowych 3/5/7
elementów.
– gwarantuje, że nie będzie zdegenerowanych podciągów (pustych).
– kompromis pomiędzy opcją 1 i 2
148
Podział – pseudokod (opcja 1)
Partition(A, Left, Right)
1.
Pivot
A[Right]
2.
i
Left – 1
3.
for
j Left to Right–1
4.
do if
(A[j] ≤ Pivot)
5.
then
i
i + 1
6.
Exchange(A[i], A[j])
7.
Exchange (A[i+1], A[Right])
8.
return
i +1
149
Randomizowany Quicksort (opcja 2)
Zakładamy że nie ma powtórzeń
Jako element osiowy wybieramy losowy element ciągu (opcja 2)
Powtarzamy procedurę, wszystkie podziały są równie prawdopodobne
(1:n-1, 2:n-2, ..., n-1:1), z prawdopodobieństwem 1/n
Randomizacja jest drogą do unikania najgorszego przypadku
150
Randomizowany Quicksort
Randomized-Partition(A,p,r)
01 i←Random(p,r)
02 exchange A[r] ↔A[i]
03
return Partition(A,p,r)
Randomized-Quicksort(A,p,r)
01
if p<r then
02
q←Randomized-Partition(A,p,r)
03
Randomized-Quicksort(A,p,q)
04
Randomized-Quicksort(A,q+1,r)
151
Quicksort – czas działania
Najgorszy przypadek: O(N
2
)
– Podciągi zawsze mają długości 0 i N-1 (el. Osiowy jest zawsze
najmniejszy/największy). Np. dla posortowanego ciągu i pierwszej
opcji wyboru el. osiowego.
Najlepszy przypadek: O(NlogN)
– Podział jest zawsze najlepszy (N/2). El. osiowy zawsze jest
medianą.
Średnio: O(NlogN)
152
Quicksort – najlepszy przypadek
Podciągi otrzymane w wyniku podziału są równe
( )
2 ( / 2)
( )
T n
T n
n
=
+ Θ
153
Quicksort – najgorszy przypadek
154
Quicksort- czas działania
T(N) = T(i) + T(N-i-1) + N for N > 1
T(0) = T(1) = 1
– T(i) i T(N-i-1) dla podziału i/N-i-1.
– N dla podziału 1/N-1(liniowe – przeglądamy wszystkie elementy).
155
Quicksort – czas działania
najgorzej: T(N) = T(0) + T(N-1) + N = T(N-1) + N = O(N
2
)
najlepiej: T(N) = 2T(N/2) + N = O(NlogN)
„średnio”:
T(N) = (1/N) ∑
∑
∑
∑
i=0
N-1
T(i) + (1/N) ∑
∑
∑
∑
i=0
N-1
T(N-i-1) + N
= (2/N) ∑
∑
∑
∑
j=0
N-1
T(j) + N = O(NlogN)
156
Quicksort - uwagi
Małe ciągi
– Quicksort zachowuje się źle dla krótkich ciągów.
– Poprawa – jeśli podciąg jest mały zastosować sortowanie przez
wstawianie (zwykle dla ciągów o długości 5 ~ 20)
Porównanie z mergesort:
– Oba zbudowane na zasadzie „dziel i zwyciężaj”.
– Mergesort wykonuje sortowanie w fazie łączenia.
– Quicksort wykonuje prace w fazie podziału.
157
Heap Sort – pojęcie kopca
Struktura kopca binarnego
– Drzewo binarne (bliskie zrównoważenia)
• Wszystkie poziomy, z wyjątkiem co najwyżej ostatniego, kompletnie
zapełnione
– Wartość klucza w węźle jest większa lub równa od wartości kluczy
wszystkich dzieci; własność taka jest zachowana dla lewego i prawego
poddrzewa (zawsze)
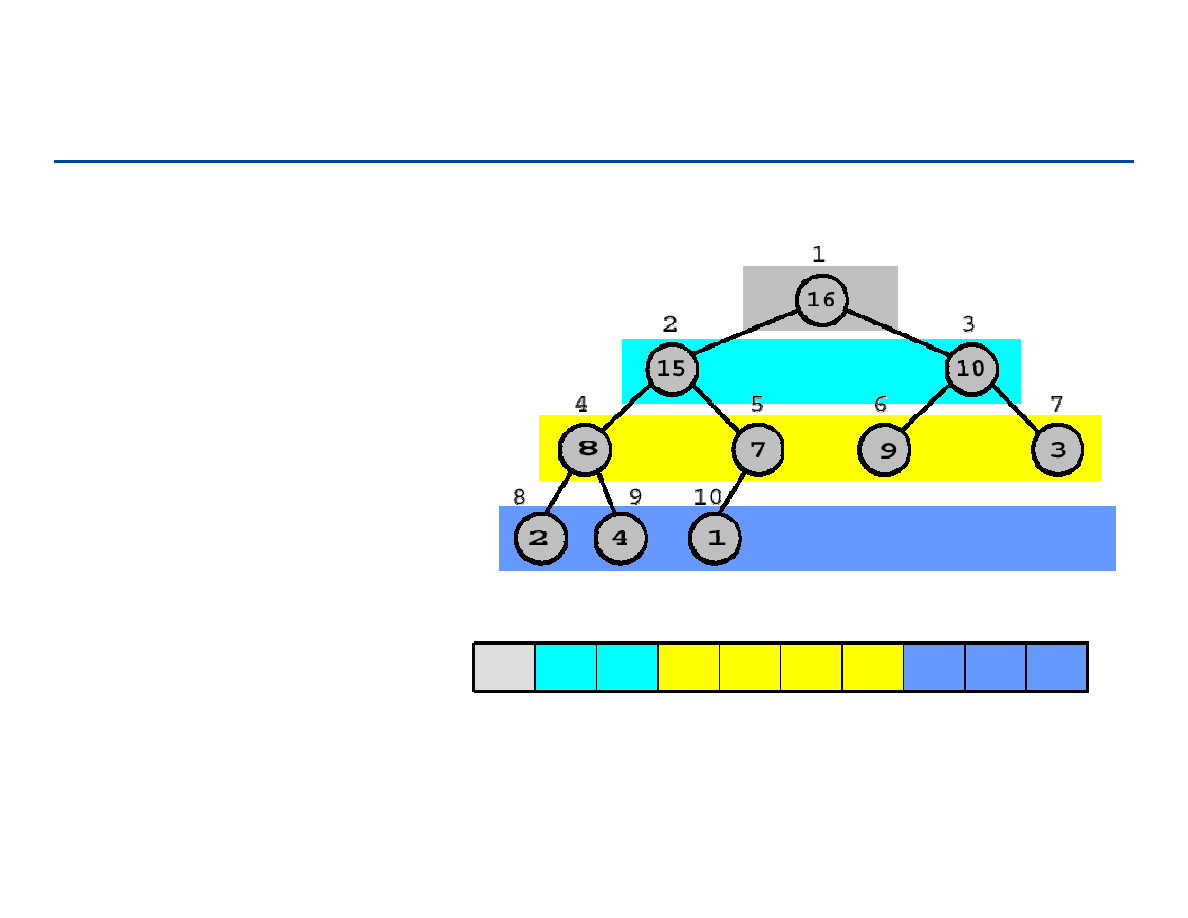
158
Heap Sort – reprezentacja tablicowa kopca
1
4
2
3
9
7
8
10
15
16
10
9
8
7
6
5
4
3
2
1
Parent (
i
)
return
i
/2
Left (
i
)
return 2
i
Right (
i
)
return 2
i
+1
Własność kopca:
A
[Parent(
i
)] ≥
A
[
i
]
poziomy: 3
2
1
0
159
Heap Sort – reprezentacja kopca w tablicy
Zauważmy połączenia w drzewie – dzieci węzła i występują na pozycjach
2i oraz 2i+1
Czemu to jest wygodne?
– Dla reprezentacji binarnej, dzieleniu/mnożeniu przez 2 odpowiada
przesuwanie (szybka operacja)
– Dodawanie jedynki oznacza zmianę najmłodszego bitu (po przesunięciu)
160
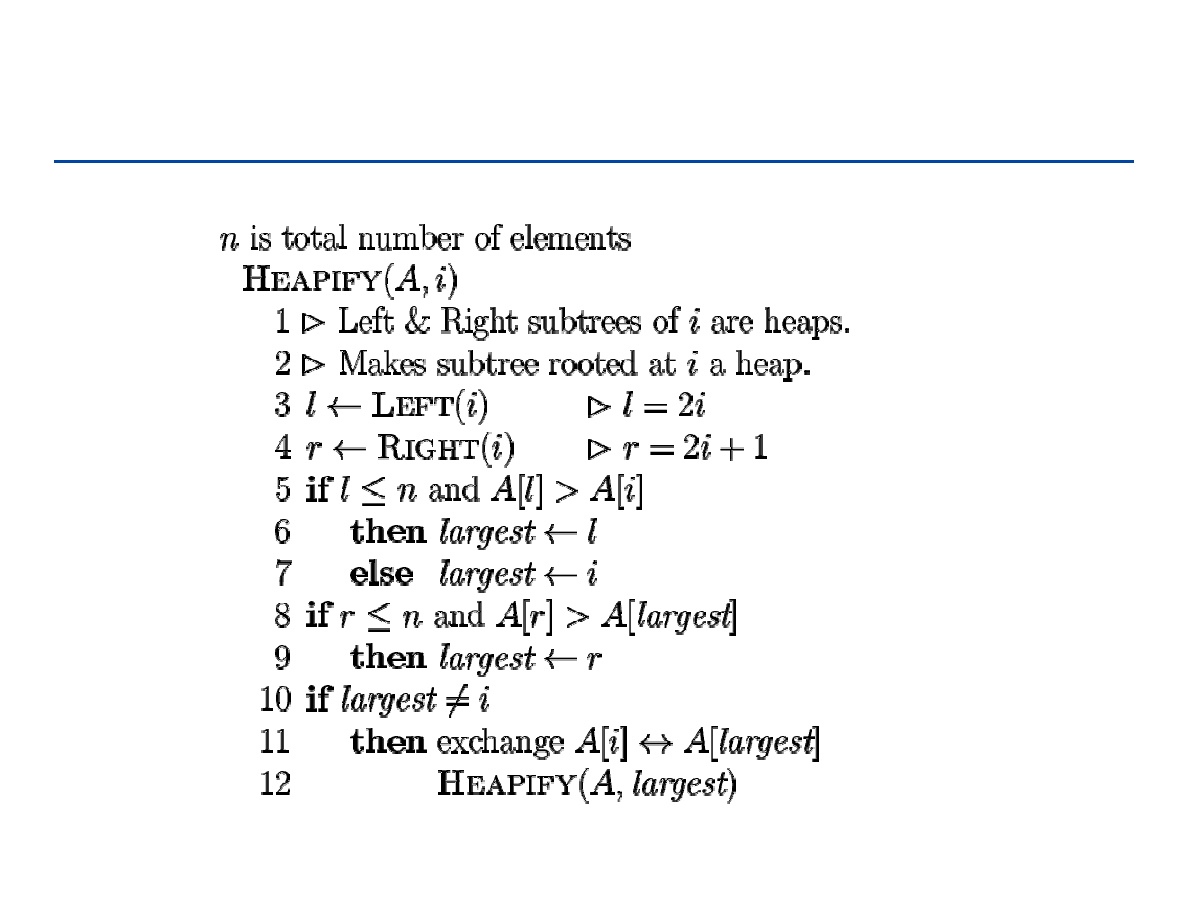
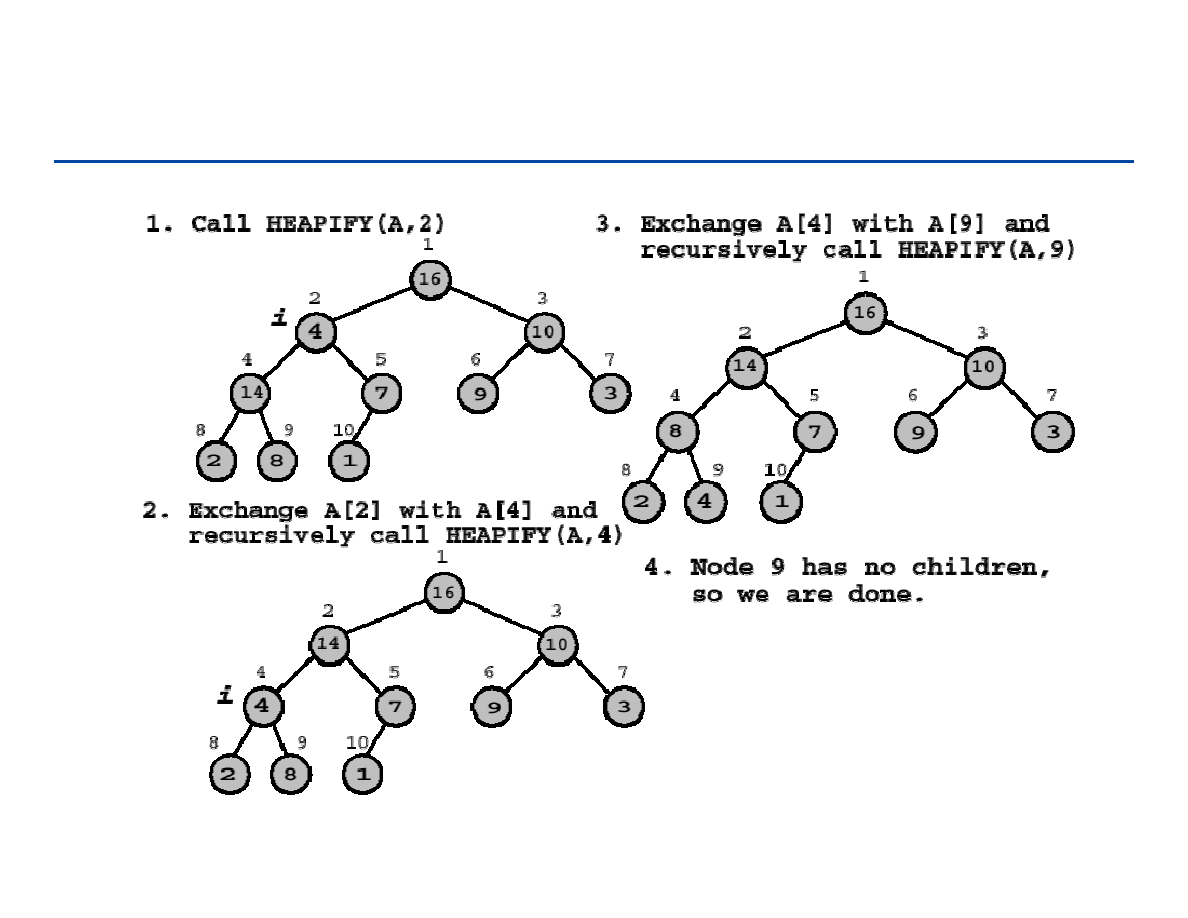
Kopcowanie (Heapify)
Niech i będzie indeksem w tablicy A
Niech drzewa binarne Left(i) i Right(i) będą kopcami
Ale, A[i] może być mniejsze od swoich dzieci – co powoduje złamanie
własności kopca
Metoda Kopcowania (Heapify) przywraca własności kopca dla A poprzez
przesuwanie A[i] w dół kopca aż do momentu, kiedy własność kopca jest
już spełniona
161
Kopcowanie (Heapify)
162
Kopcowanie (Heapify) – przykład
163
Kopcowanie – czas działania
Czas działania procedury Heapify dla poddrzewa o n węzłach i korzeniu
w i:
– Ustalenie relacji pomiędzy elementami: Θ(1)
– dodajemy czas działania Heapify dla poddrzewa o korzeniu w jednym z
potomków i, gdzie rozmiar tego poddrzewa 2n/3 jest najgorszym
przypadkiem.
– Inaczej mówiąc
• Czas działania dla drzewa o wysokości h: O(h)
( )
(2 / 3)
(1)
( )
(log )
T n
T
n
T n
O
n
≤
+ Θ
⇒
=
164
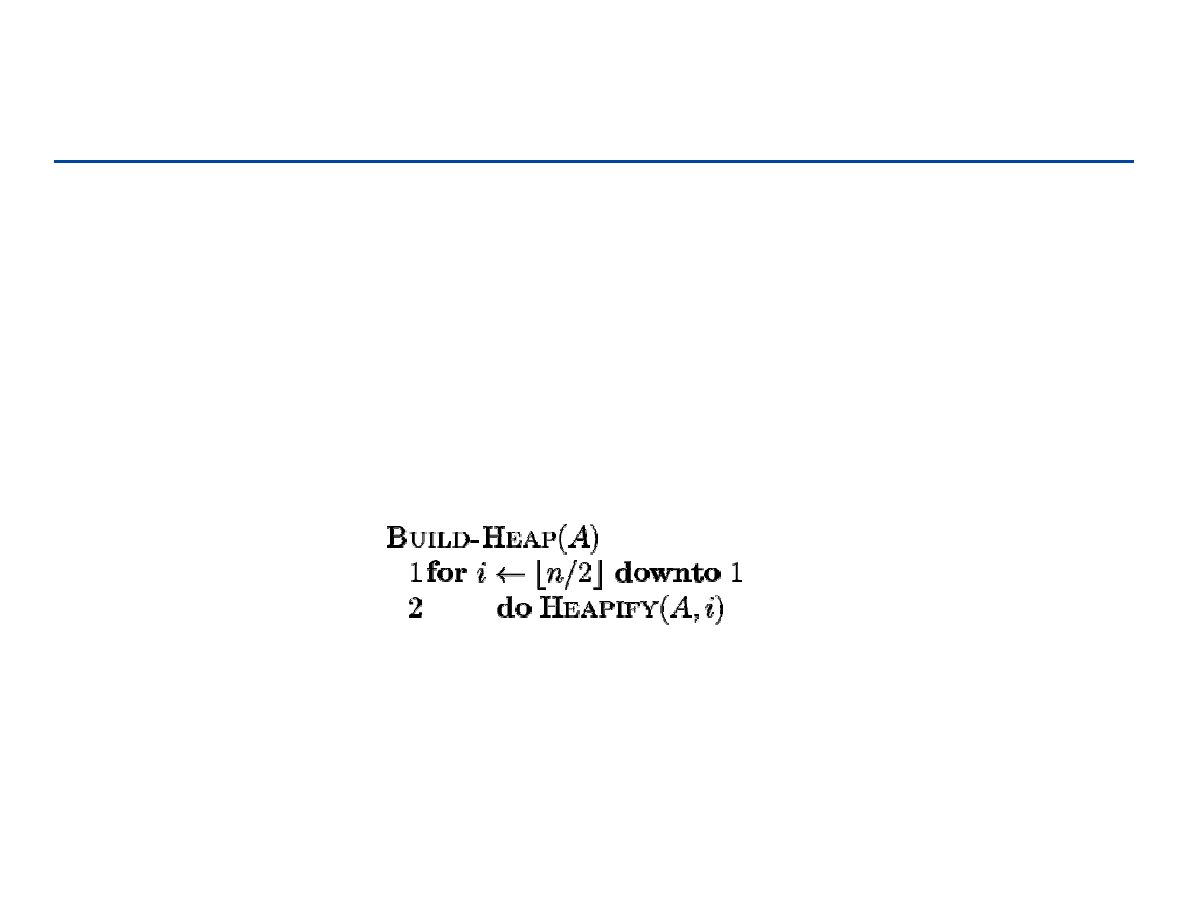
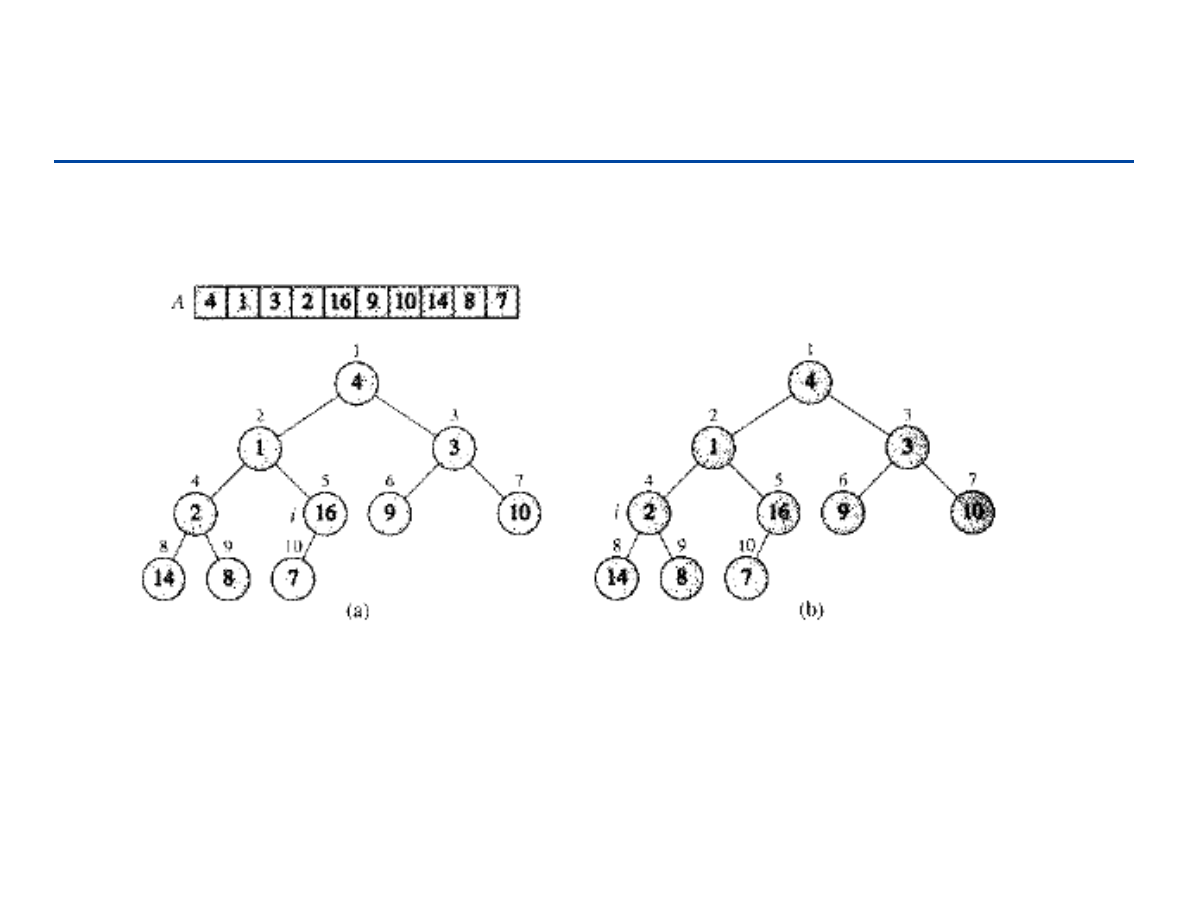
Budowa kopca
Konwertujemy tablicę A[1...n], gdzie n = length[A], na kopiec
Zauważmy, że elementy w A[(n/2 + 1)...n] są już zbiorem kopców -
jednoelementowych!
165
Budowanie kopca – 1
166
Budowanie kopca – 2
167
Budowanie kopca – 3
168
Budowa kopca – analiza
Poprawność: indukcja po i, (wszystkie drzewa o korzeniach m > i są
kopcami)
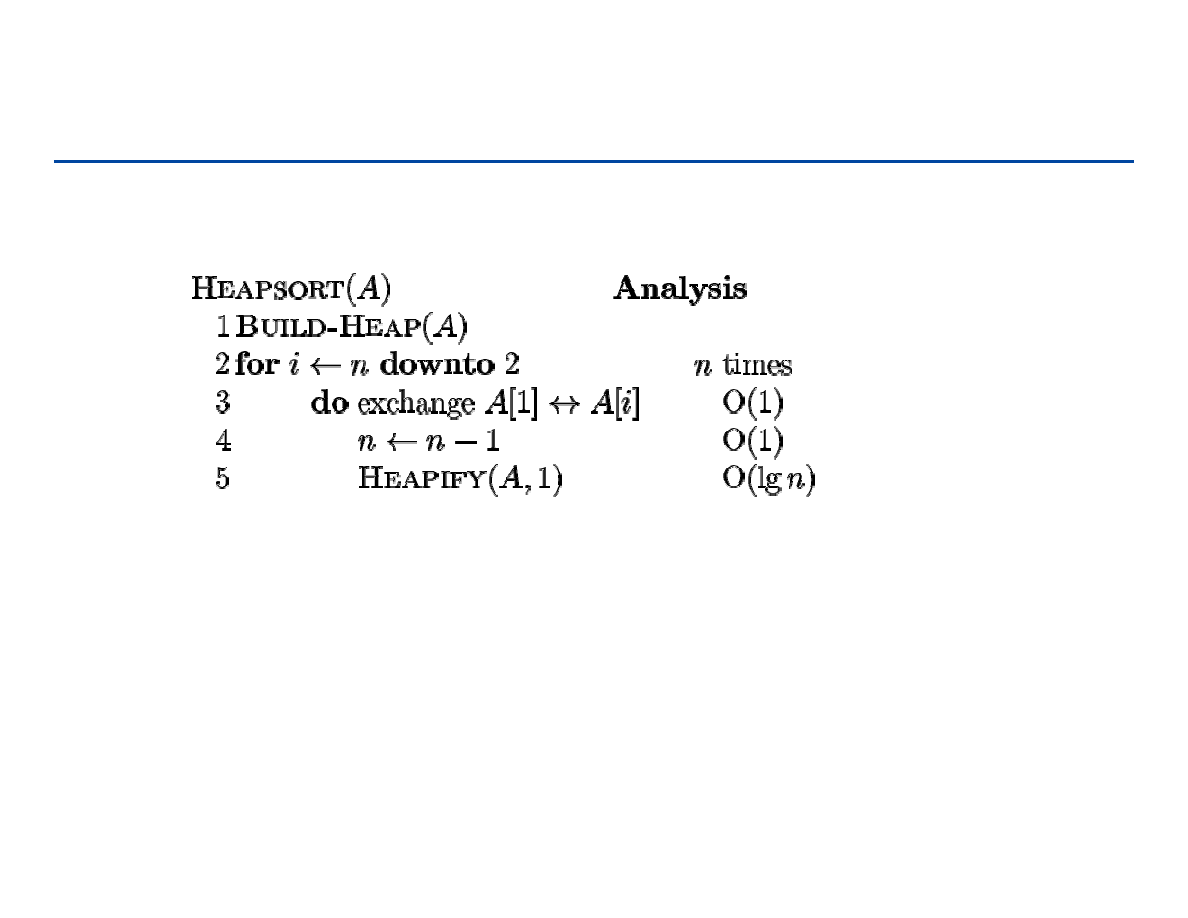
Czas działania: n wywołań kopcowania (Heapify) = n O(lg n) = O(n lg n)
Wystarczająco dobre ograniczenie – O(n lg n) dla zadania sortowanie
(Heapsort), ale czasem kopiec budujemy dla innych celów
169
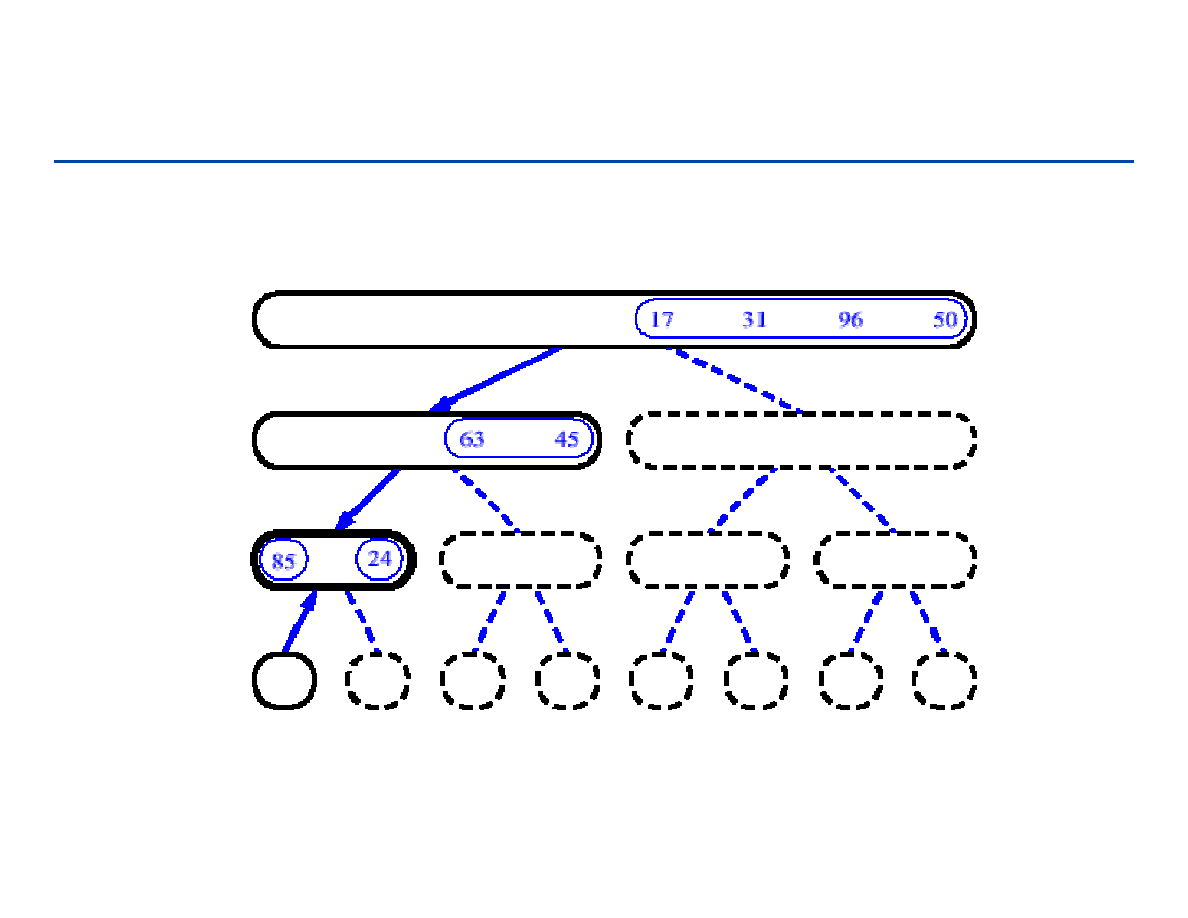
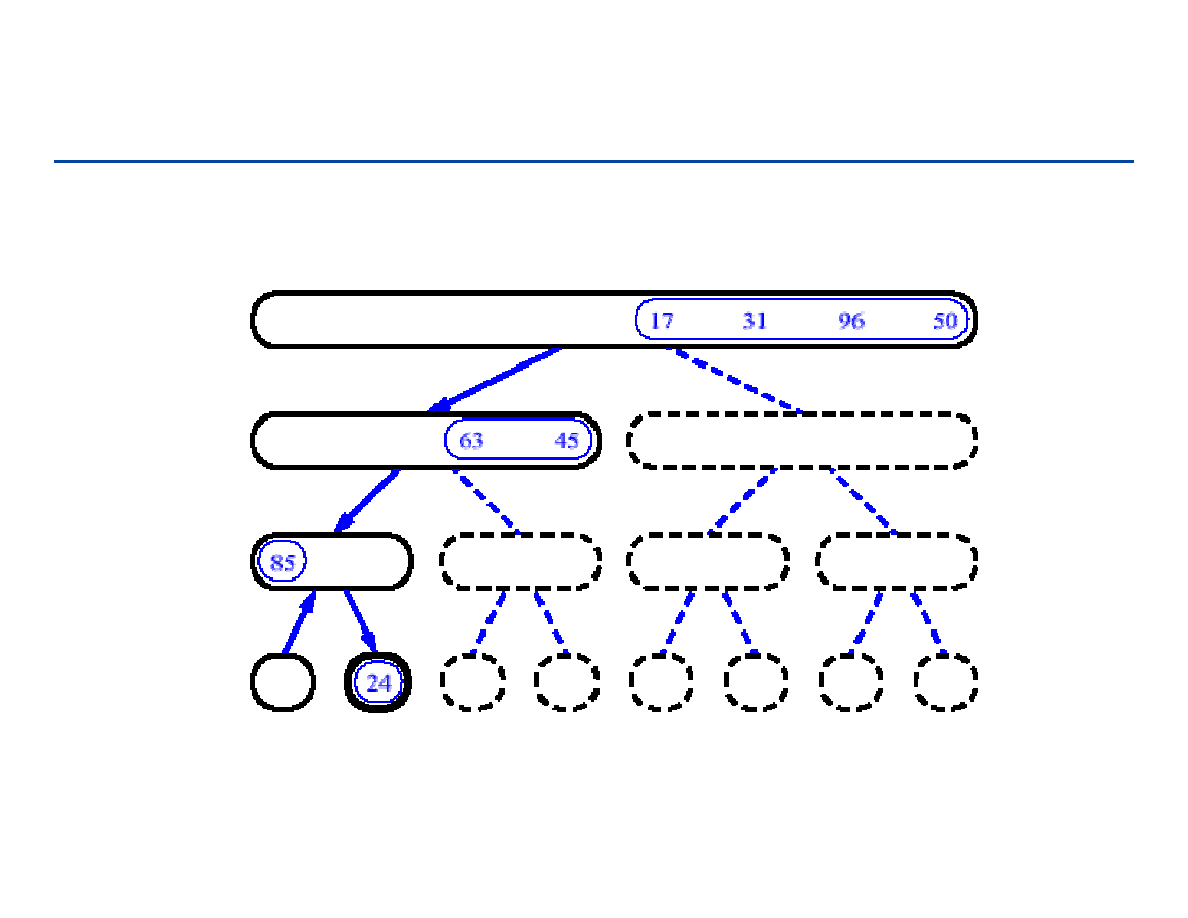
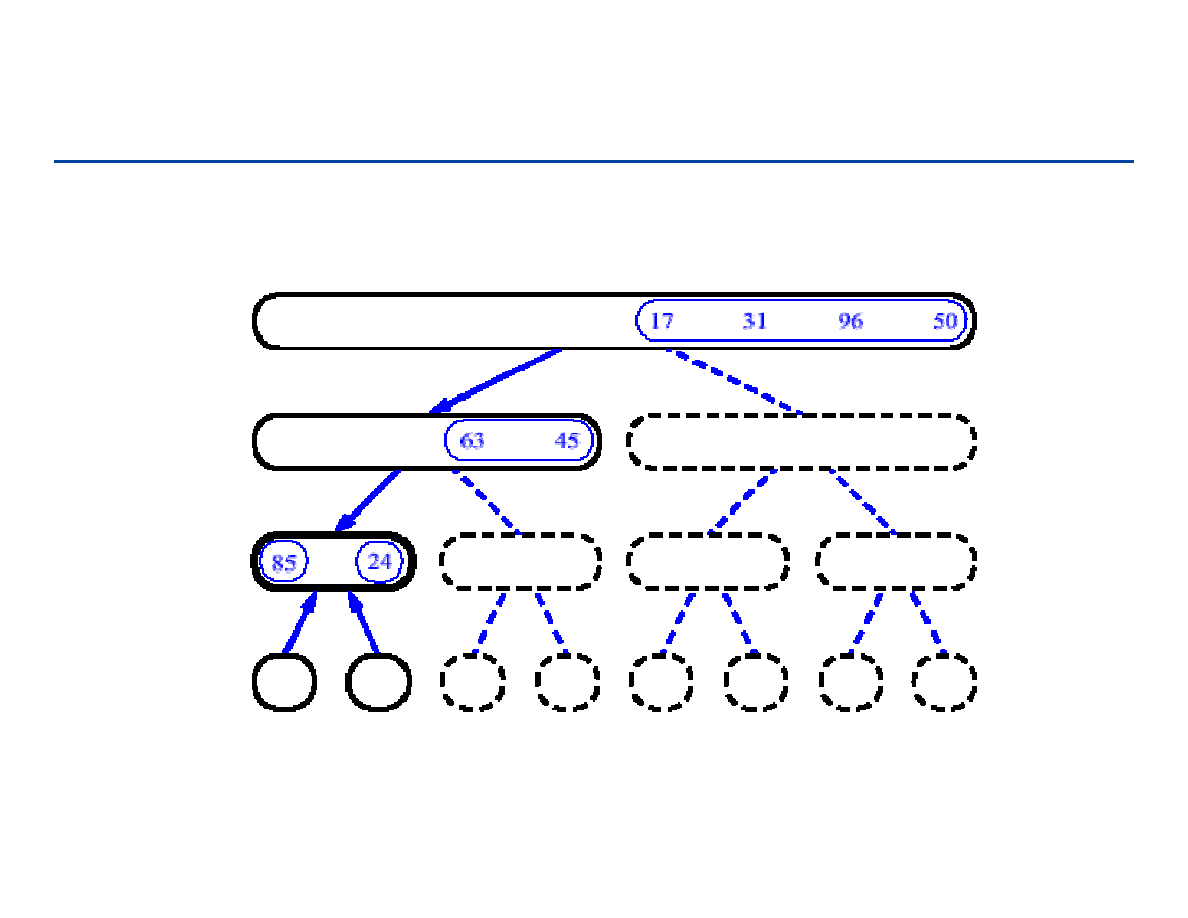
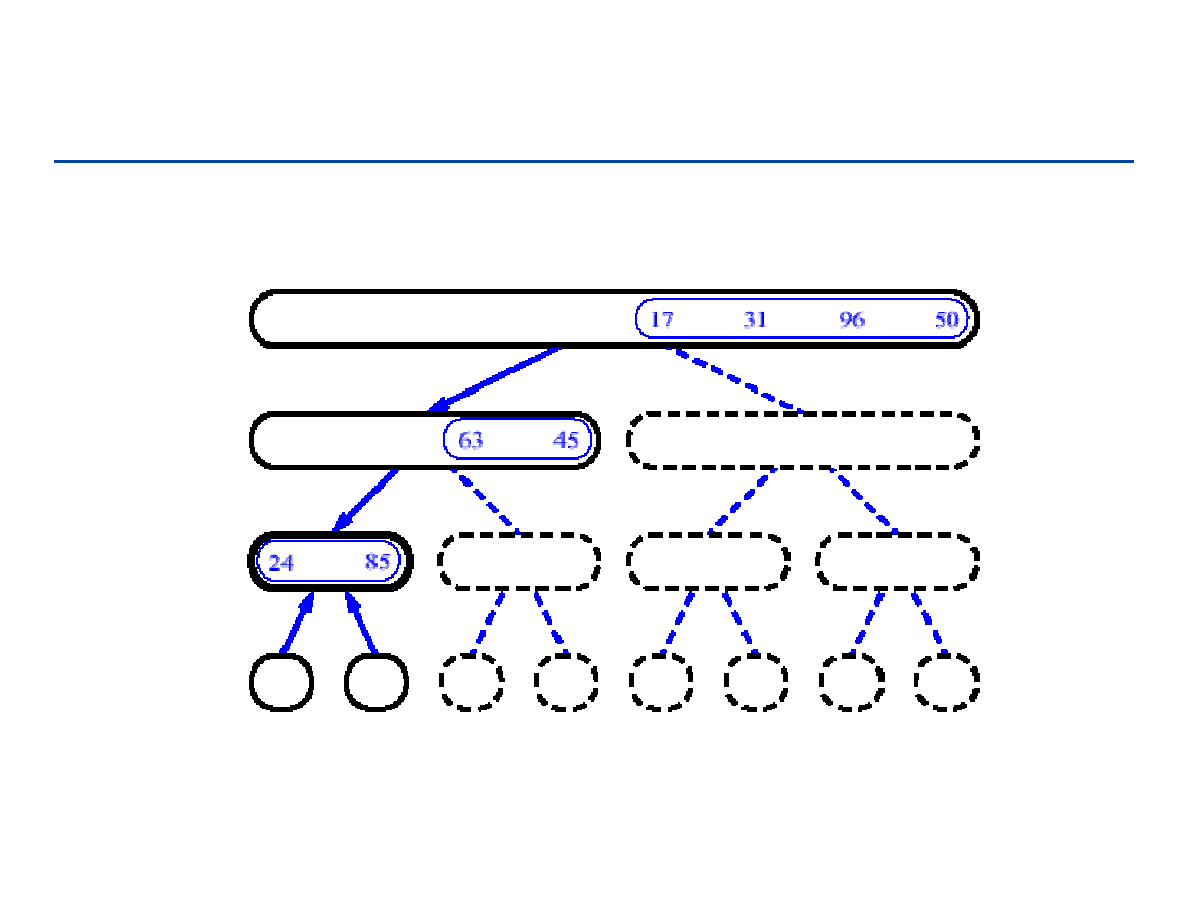
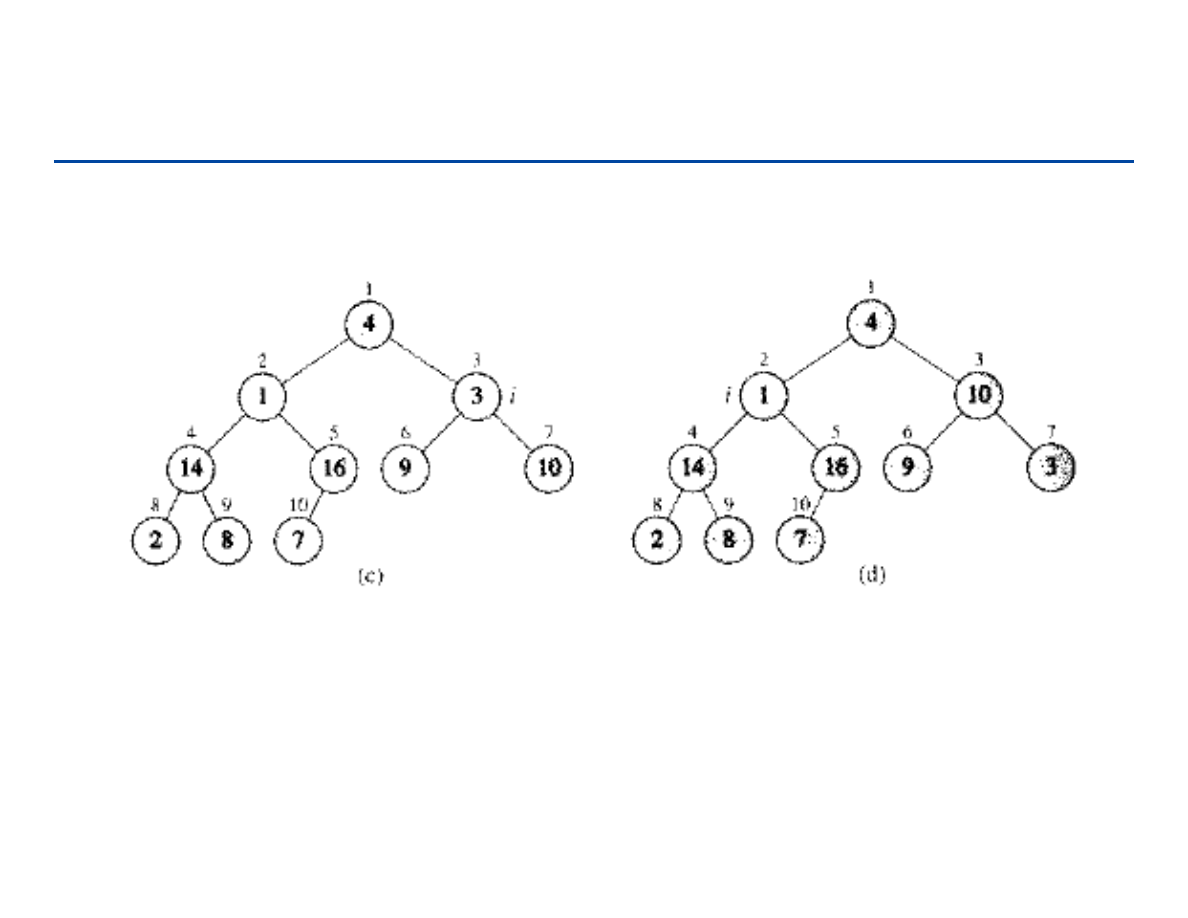
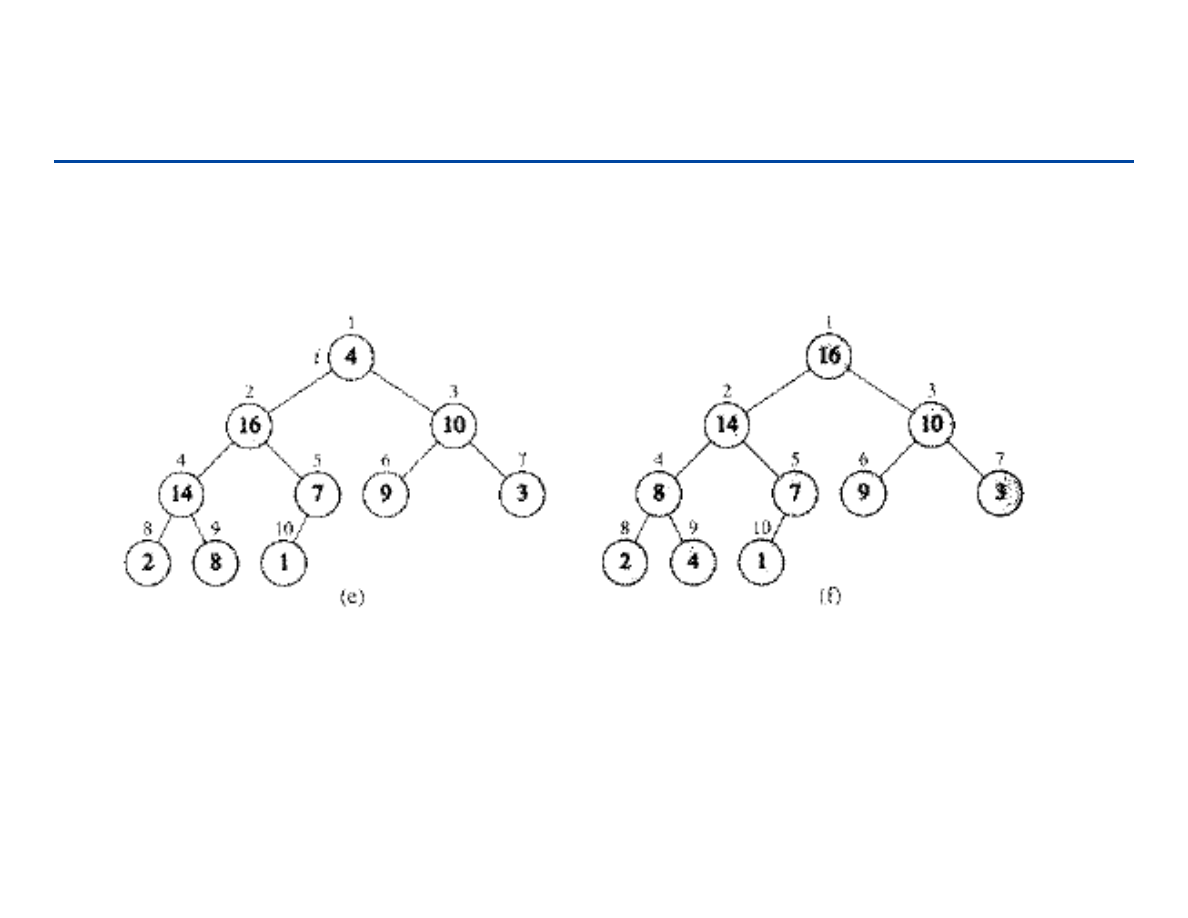
Sortowanie za pomocą kopca – Heap Sort
Czas działania O(n lg n) + czas budowy kopca (O(n))
O( )
n
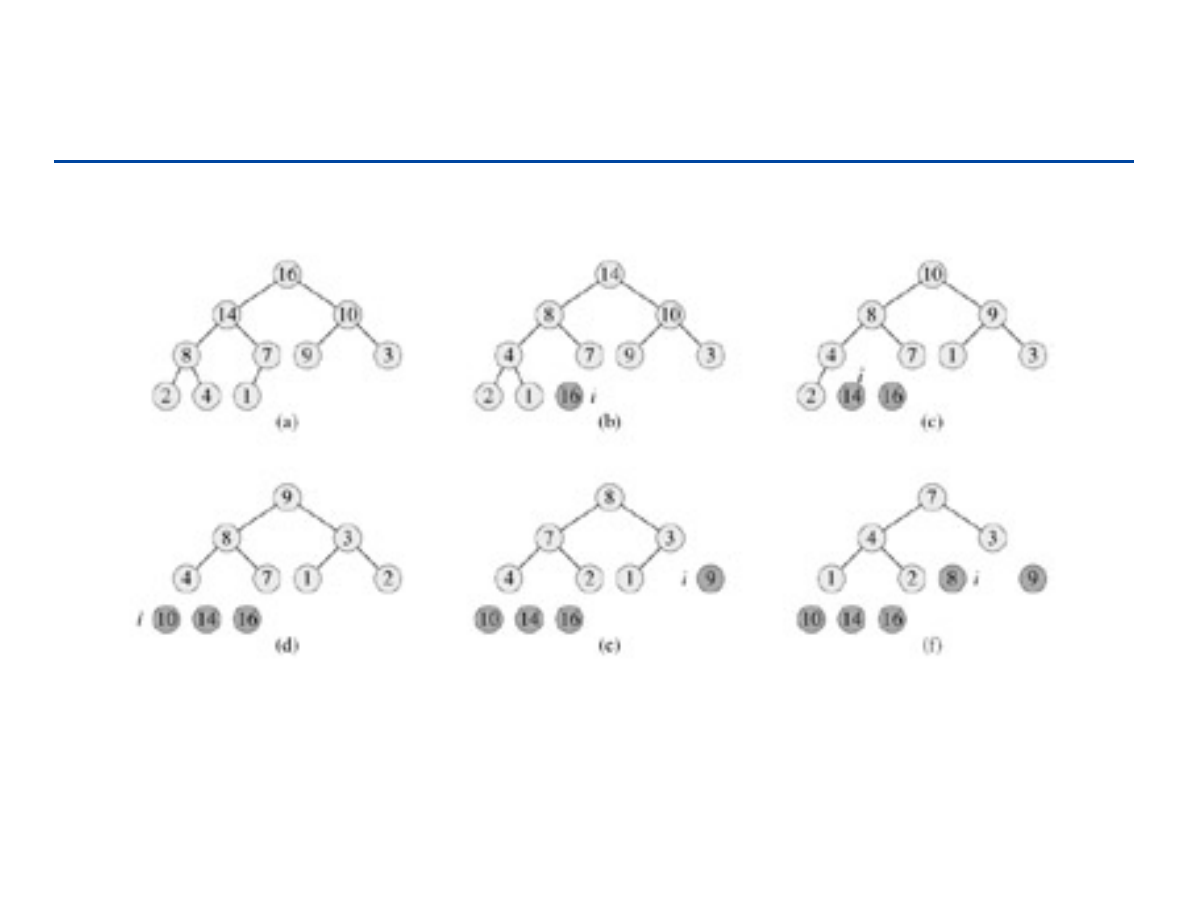
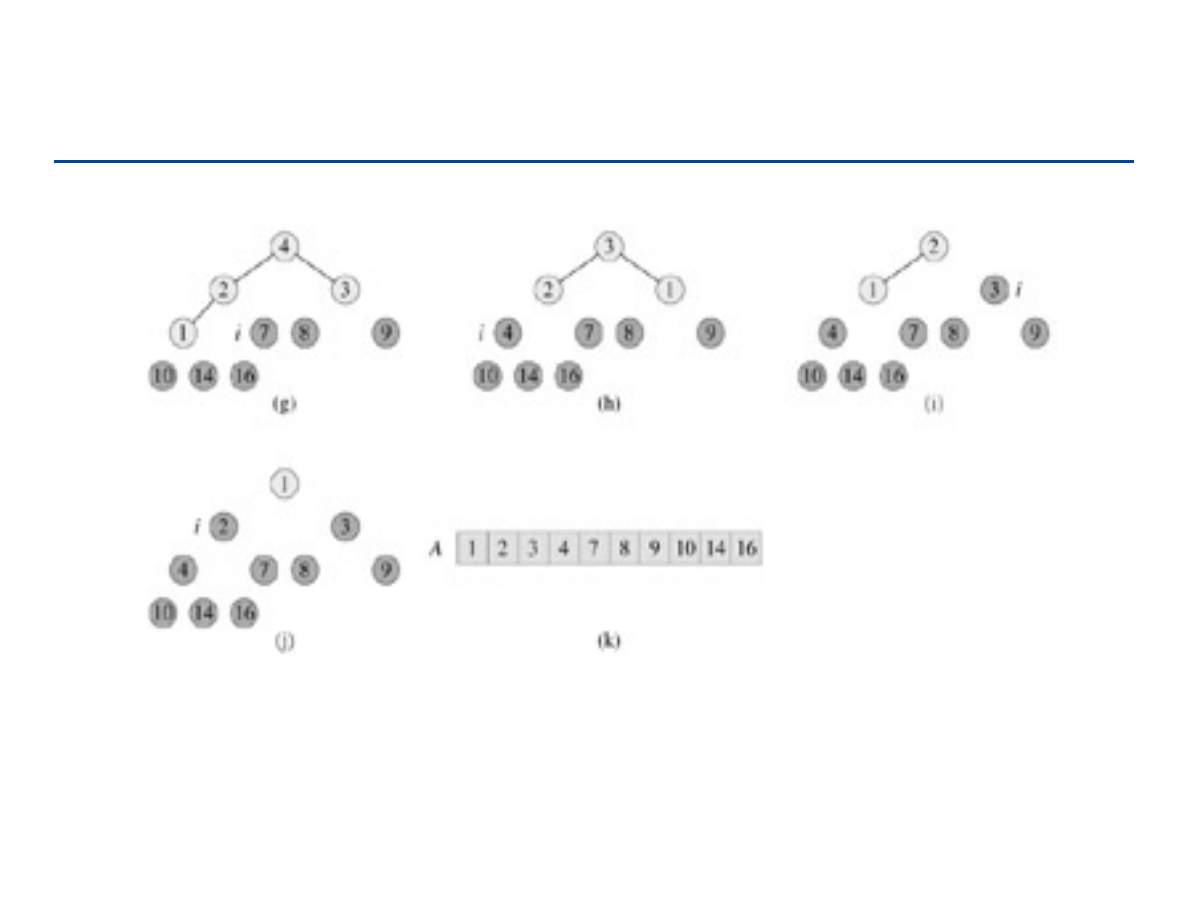
170
Heap Sort – 1
171
Heap Sort – 2
172
Heap Sort – podsumowanie
Heap sort wykorzystuje strukturę kopca przez co dostajemy
asymptotycznie optymalny czas sortowania
Czas działania O(n log n) – podobnie do merge sort, i lepiej niż wybór,
wstawianie czy bąbelkowe
Sortowanie w miejscu – podobnie do sortowania przez wybór, wstawianie
czy bąbelkowego

173
Dynamiczne struktury danych
174
Wprowadzenie
Popularne dynamiczne struktury danych (ADT)
stosy, kolejki, listy – opis abstrakcyjny
Listy liniowe
Implementacja tablicowa stosu i kolejki
Drzewa
Możliwe implementacje
Plan wykładu
175
Wprowadzenie
Do tej pory najczęściej zajmowaliśmy się jedną strukturą danych –
tablicą. Struktura taka ma charakter statyczny – jej rozmiar jest
niezmienny. Powoduje to konieczność poznania wymaganego rozmiaru
przed rozpoczęciem działań (ewentualnie straty miejsca – deklarujemy
„wystarczająco” dużą tablicę).
W wielu zadaniach wygodniejsza jest struktura o zmiennym rozmiarze
(w zależności od aktualnych potrzeb) – struktura dynamiczna.
Potrzebujemy struktury pozwalającej na przechowywanie elementów
niezależnie od ich fizycznego położenia.
logicznie
fizycznie
2
5
0
3
4
1
3
4
2
1
0
5
176
Wprowadzenie
Przykładowe operacje dla struktur danych:
–
Insert(S, k): wstawianie nowego elementu
–
Delete(S, k): usuwanie elementu
–
Min(S), Max(S): odnajdowanie najmniejszego/największego elementu
–
Successor(S,x), Predecessor(S,x): odnajdowanie
następnego/poprzedniego elementu
Zwykle przynajmniej jedna z tych operacji jest kosztowna czasowo
(zajmuje czas O(n)). Czy można lepiej?
177
Abstrakcyjne typy danych (Abstract Data Types –ADT )
Abstrakcyjnym typem danych nazywany formalną specyfikację sposobu
przechowywania obiektów oraz zbiór dobrze opisanych operacji na tych
obiektach.
Jaka jest różnica pomiędzy strukturą danych a ADT?
struktura danych (klasa) jest implementacją ADT dla specyficznego
komputera i systemu operacyjnego.
178
Popularne dynamiczne ADT
Listy łączone
Stosy, kolejki
Drzewa – z korzeniem (rooted trees), binarne, BST, czerwono-
czarne, AVL itd.
Kopce i kolejki priorytetowe (późniejsze wykłady)
Tablice z haszowaniem (późniejsze wykłady)
179
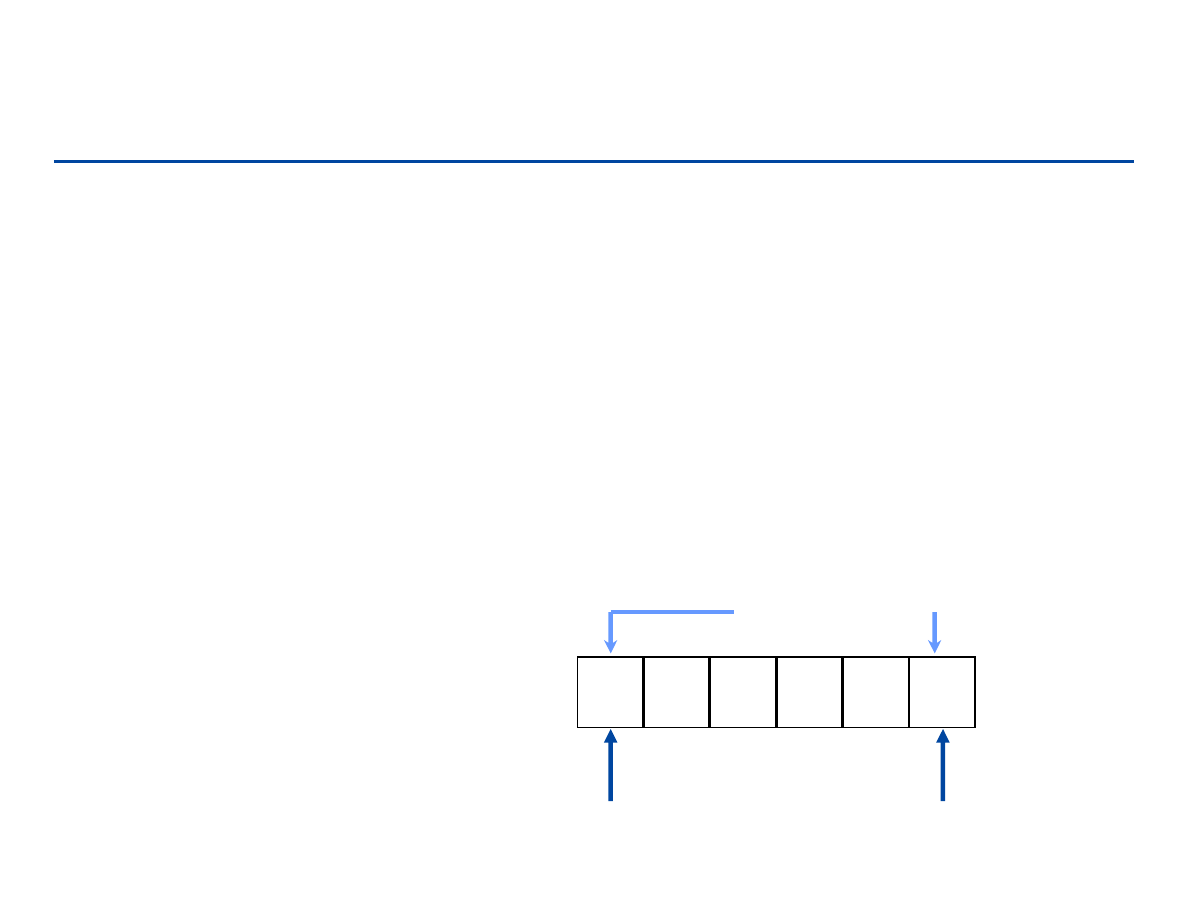
Listy
Lista L jest liniową sekwencją elementów.
Pierwszy element listy jest nazywany head, ostatni tail. Jeśli obydwa
są równe null, to lista jest pusta
Każdy element ma poprzednik i następnik (za wyjątkiem head i tail)
Operacje na liście:
– Successor(L,x), Predecessor(L,x)
– List-Insert(L,x)
– List-Delete(L,x)
– List-Search(L,k)
2
2
0
3
0
1
x
head
tail
180
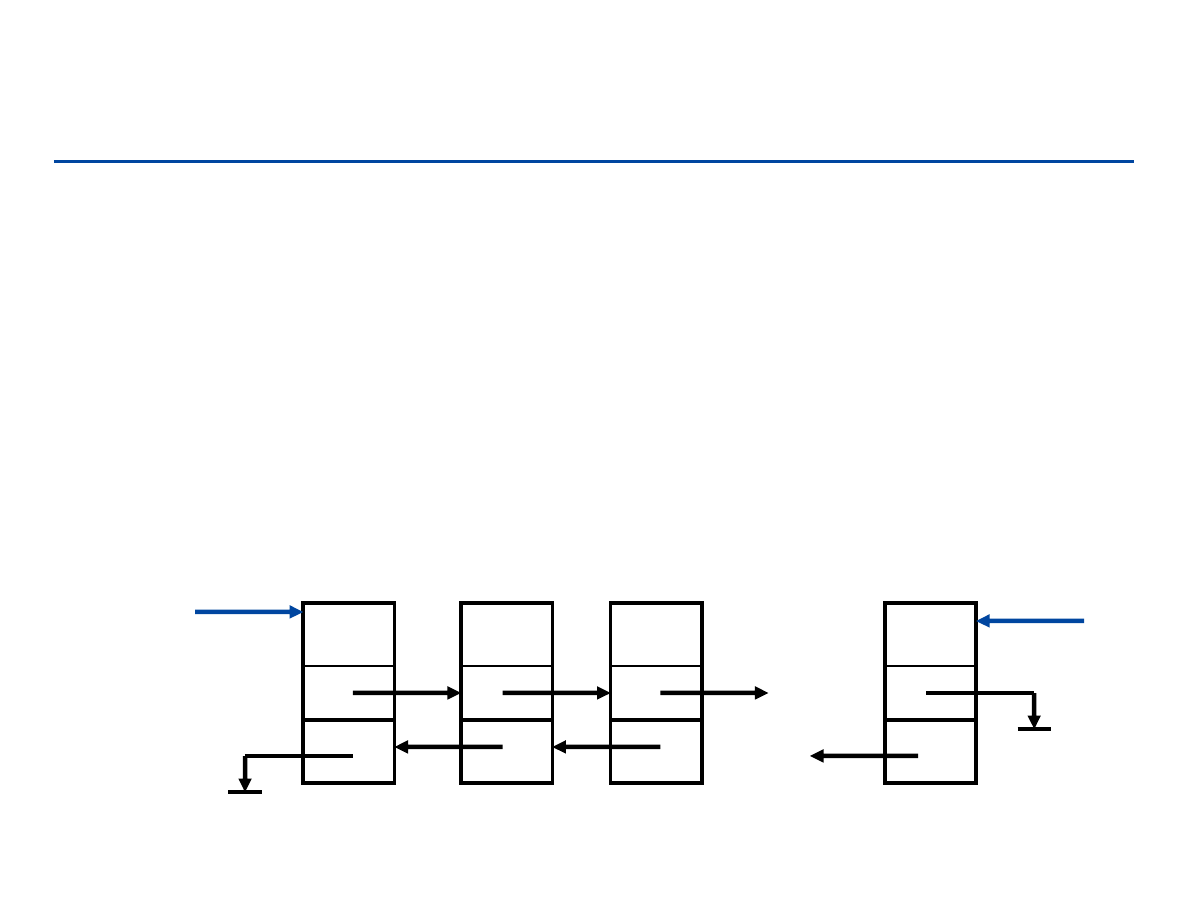
Listy łączone
Rozmieszczenie fizyczne obiektów w pamięci nie musi odpowiadać
ich logicznej kolejności; wykorzystujemy wskaźniki do obiektów (do
następnego/poprzedniego obiektu)
Manipulując wskaźnikami możemy dodawać, usuwać elementy do
listy bez przemieszczania pozostałych elementów listy
Lista taka może być pojedynczo lub podwójnie łączona.
a1
a2
an
a3
head
null
null
tail
…
181
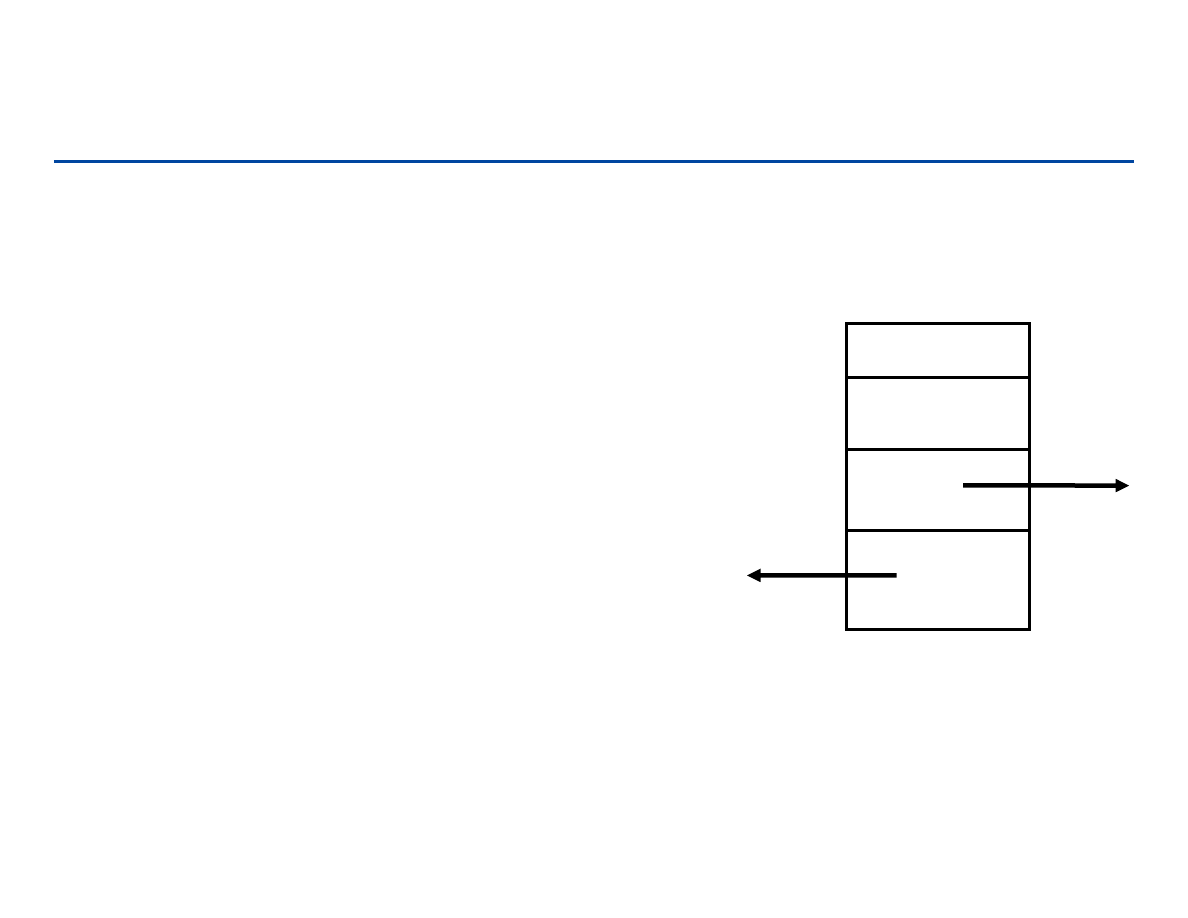
Węzły i wskaźniki
Węzłem nazywać będziemy obiekt
przechowujący daną oraz wskaźnik do
następnej danej i (opcjonalnie – dla listy
podwójnie łączonej) wskaźnik do
poprzedniej danej. Jeśli nie istnieje
następny obiekt to wartość wskaźnika
będzie “null”
Wskaźnik oznacza adres obiektu w
pamięci
Węzły zajmują zwykle przestrzeń: Θ(1)
struct node {
key_type key;
data_type data;
struct node *next;
struct node *prev;
}
data
next
prev
key
182
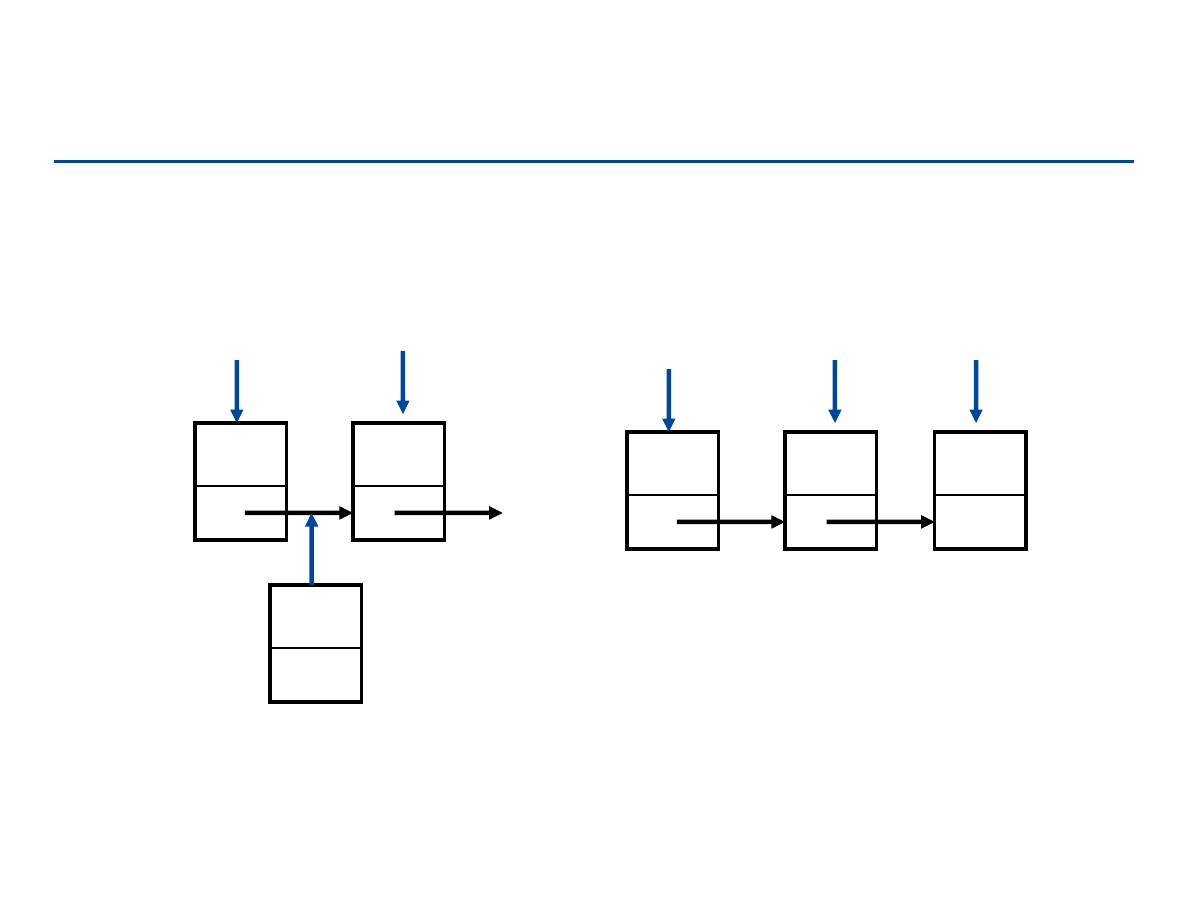
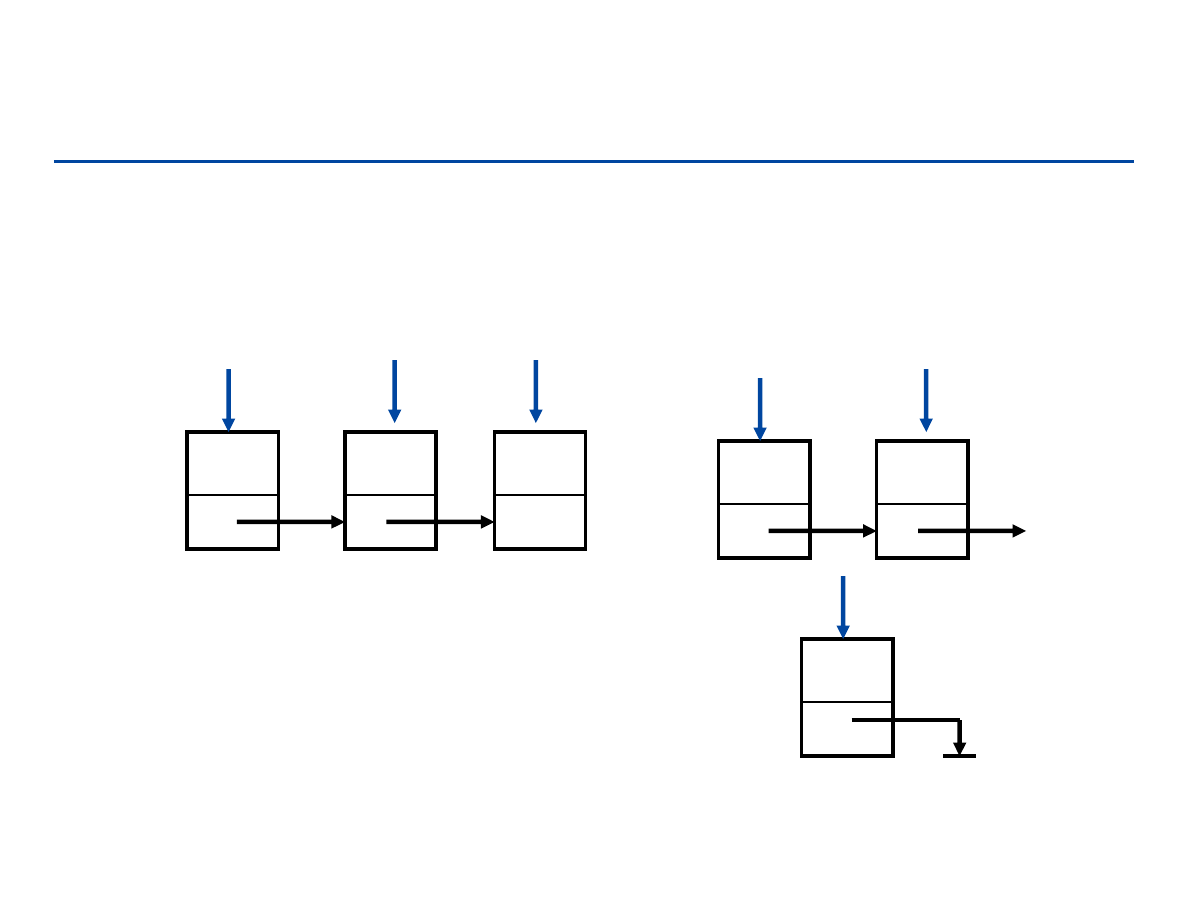
Wstawianie do listy (przykład operacji na liście)
wstawianie nowego węzła q pomiędzy węzły p i r:
a1
a3
p
r
a2
p
r
a1
a2
q
a3
next
[q]
r
next
[p]
q
183
Usuwanie z listy
usuwanie węzła q
a1
a2
p
q
a3
r
a1
a3
p
r
next
[p]
r
next
[q]
null
a2
q
null
184
Operacje na liście łączonej
List-Search(L, k)
1.
x head[L]
2.
while x ≠ null and key[x] ≠ k
3.
do x next[x]
4.
return x
List-Insert(L, x)
1.
next[x] head[L]
2.
if head[L] ≠ null
3.
then prev[head[L]] x
4.
head[L] x
5.
prev[x]
null
List-Delete(L, x)
1.
if prev[L] ≠ null
2.
then next[prev[x]] next[x]
3.
else head[L] next[x]
4.
if next[L] ≠ null
5.
then prev[next[x]] prev[x]
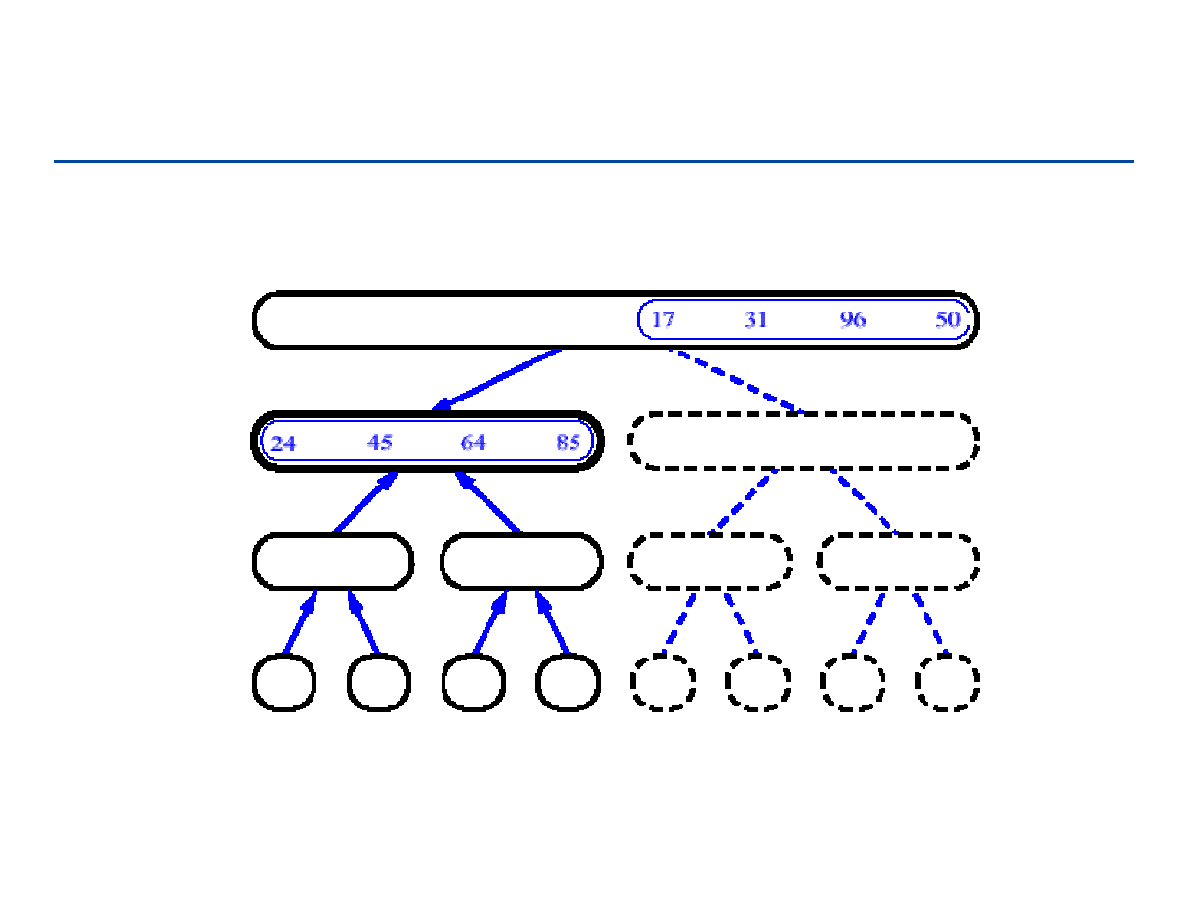
185
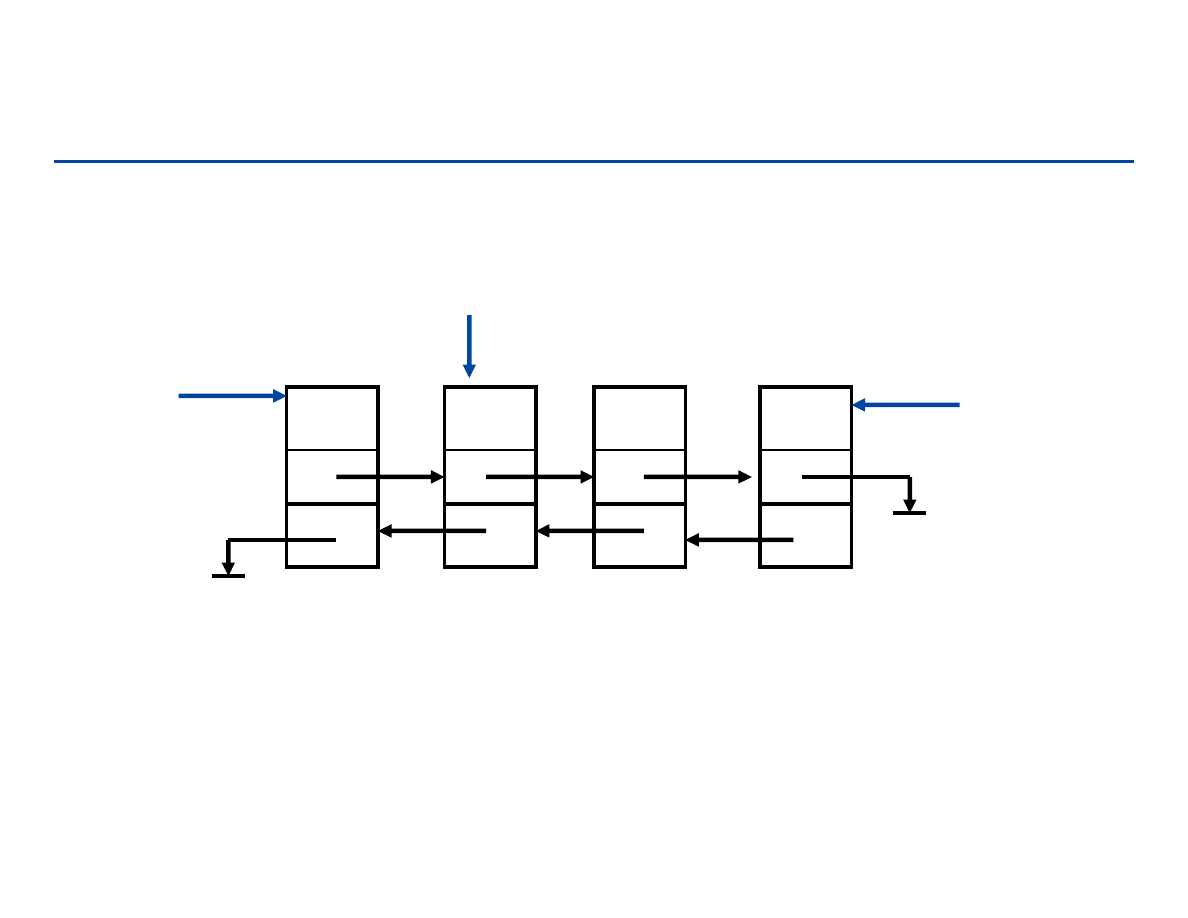
Listy podwójnie łączone
a1
a2
a4
a3
head
null
null
tail
x
Listy cykliczne: łączymy element pierwszy z ostatnim
186
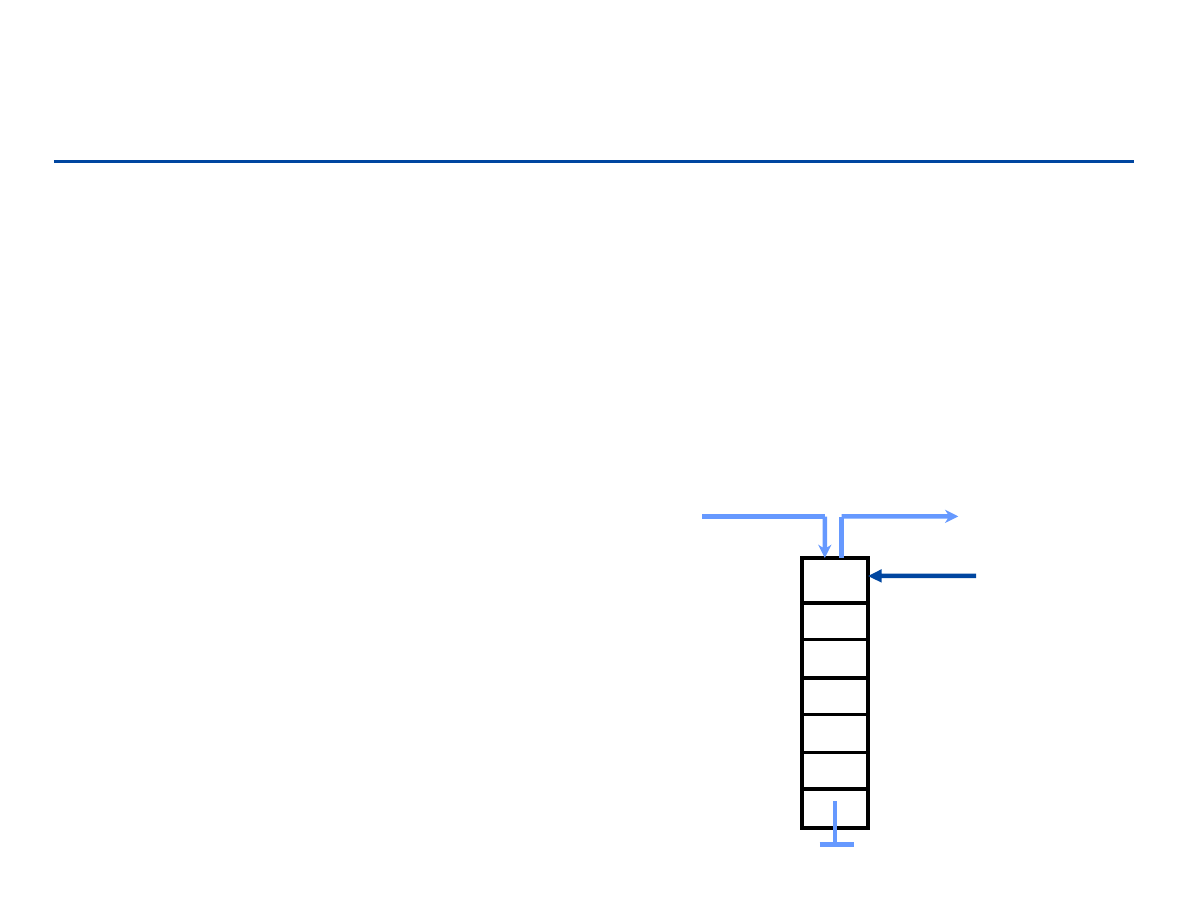
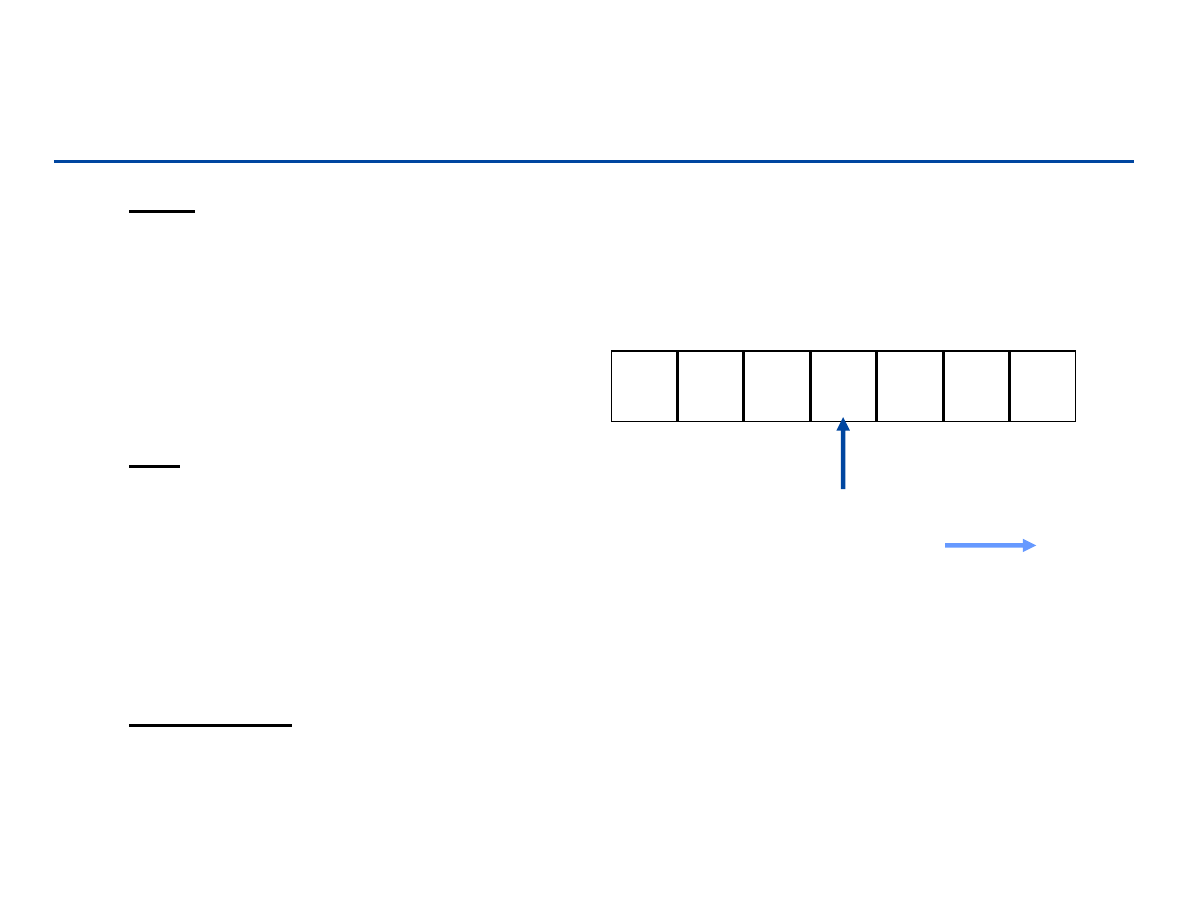
Stosem S nazywany liniową sekwencję elementów do której nowy
element x może zostać wstawiony jedynie na początek, analogicznie
element może zostać usunięty jedynie z początku tej sekwencji.
Stos rządzi się zasadą Last-In-First-Out (LIFO).
Operacje dla stosu:
– Stack-Empty(S)
– Pop(S)
– Push(S,x)
Stosy
Pop
Push
null
head
2
0
1
5
187
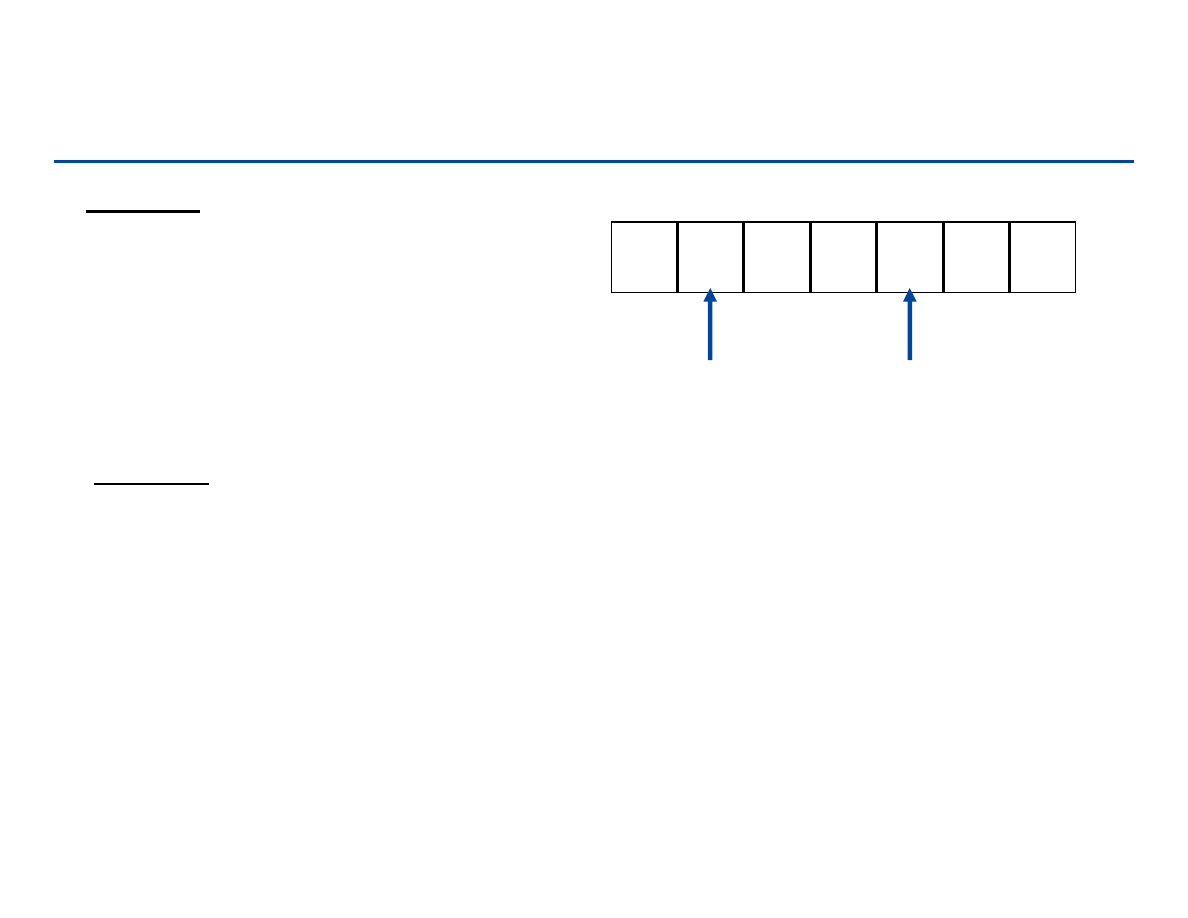
Kolejki
Kolejka Q jest to liniowa sekwencja elementów do której nowe
elementy wstawiane są na końcu sekwencji, natomiast elementy
usuwane są z jej początku.
Zasada First-In-First-Out (FIFO).
Operacje dla kolejki:
– Queue-Empty(Q)
– EnQueue(Q, x)
– DeQueue(Q)
2
2
0
3
0
1
head
tail
DeQueue
EnQueue
188
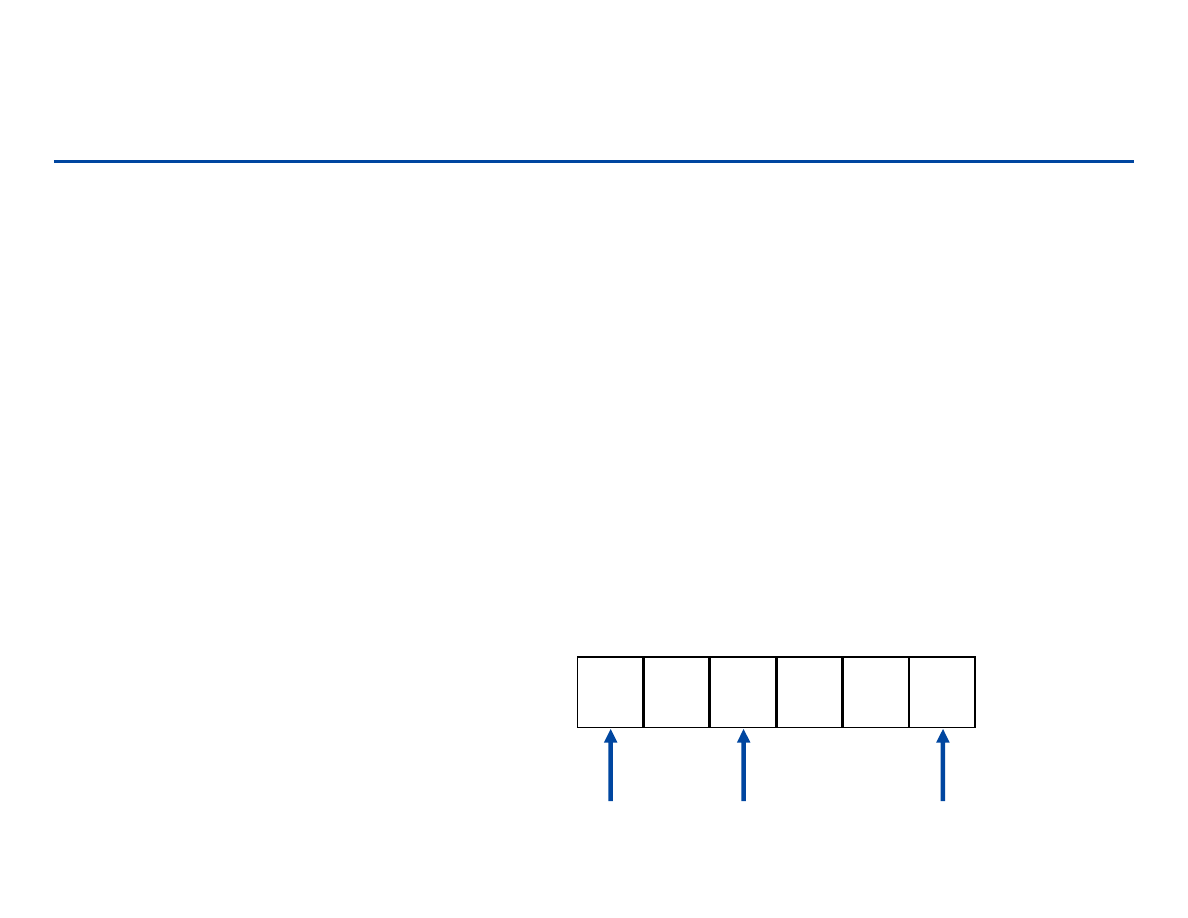
Implementacja stosu i kolejki
Tablicowa
– Wykorzystujemy tablicę A o n elementach A[i], gdzie n jest maksymalną
ilością elementów stosu/kolejki.
– Top(A), Head(A) i Tail(A) są indeksami tablicy
– Operacje na stosie/w kolejce odnoszą się do indeksów tablicy i elementów
tablicy
– Implementacja tablicowa nie jest efektywna
Listy łączone
– Nowe węzły tworzone są w miarę potrzeby
– Nie musimy znać maksymalnej ilości elementów z góry
– Operacje są manipulacjami na wskaźnikach
189
Implementacja tablicowa stosu
Push(S, x)
1.
if top[S] = length[S]
2.
then error “overflow”
3.
top[S] top[S] + 1
4.
S[top[S]] x
Pop(S)
1.
if top[S] = -1
2.
then error “underflow”
3.
else top[S] top[S] – 1
4.
return S[top[S] +1]
1
5
2
3
Kierunek
wstawiania
top
Stack-Empty(S)
1.
if top[S] = -1
2.
then return true
3.
else return false
0 1 2 3 4 5 6
190
Implementacja tablicowa kolejki
Enqueue(Q, x)
1.
Q[tail[Q]] x
2.
if tail[Q] = length[Q]
3.
then tail[Q] x
4.
else tail[Q] (tail[Q]+1)
mod n
Dequeue(Q)
1.
x Q[head[Q]]
2.
if head[Q] = length[Q]
3.
then head[Q] 1
4.
else head[Q] (head[Q]+1)
mod n
5.
return x
1
5
2
3
0
head
tail
191
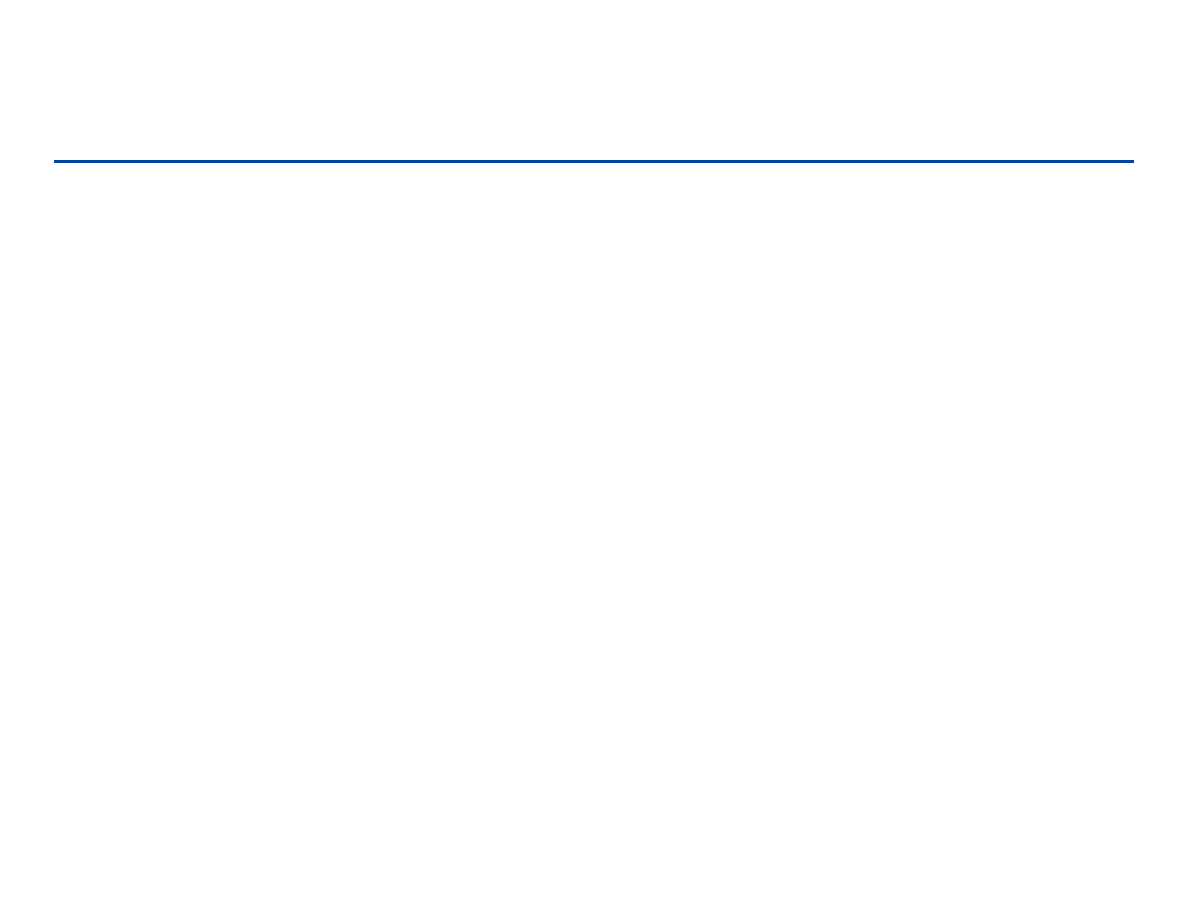
Drzewa z korzeniem
Drzewem z korzeniem T nazywamy ADT dla którego elementy są
zorganizowane w strukturę drzewiastą.
Drzewo składa się z węzłów przechowujących obiekt oraz krawędzi
reprezentujących zależności pomiędzy węzłami.
W drzewie występują trzy typy węzłów: korzeń (root), węzły
wewnętrzne, liście
Własności drzew:
– Istnieje droga z korzenia do każdego węzła (połączenia)
– Droga taka jest dokładnie jedna (brak cykli)
– Każdy węzeł z wyjątkiem korzenia posiada rodzica (przodka)
– Liście nie mają potomków
– Węzły wewnętrzne mają jednego lub więcej potomków (= 2 binarne)
192
Drzewa z korzeniem
A
B
E
F
M
L
K
D
G
J
N
C
H
I
0
1
2
3
193
Terminologia
Rodzice (przodkowie) i dzieci (potomkowie)
Rodzeństwo (sibling) – potomkowie tego samego węzła
Relacja jest dzieckiem/rodzicem.
Poziom węzła
Ścieżka (path): sekwencja węzłów n
1
, n
2
, … ,n
k
takich, że n
i
jest
przodkiem n
i+1.
Długością ścieżki
nazywamy liczbę k.
Wysokość drzewa: maksymalna długość ścieżki w drzewie od korzenia
do liścia.
Głębokość węzła: długość ścieżki od korzenia do tego węzła.
194
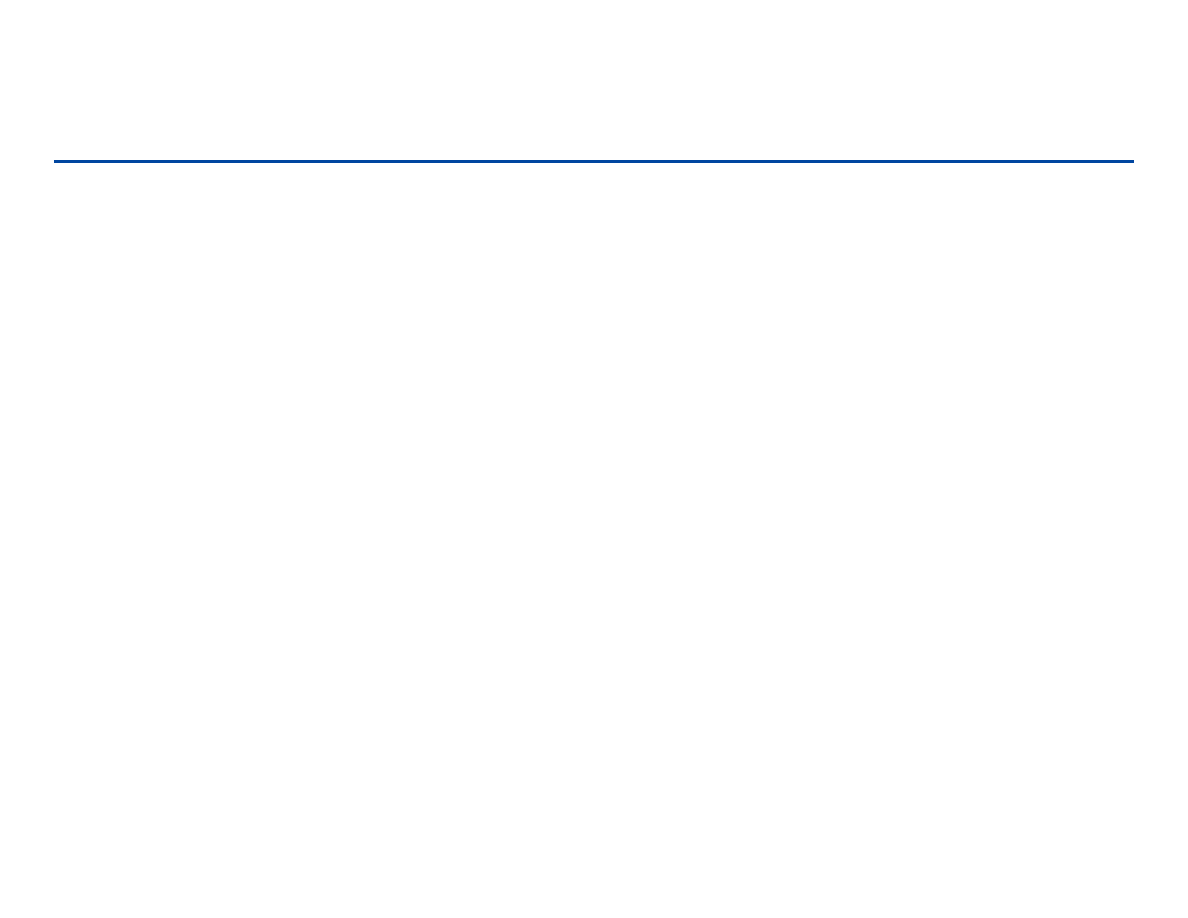
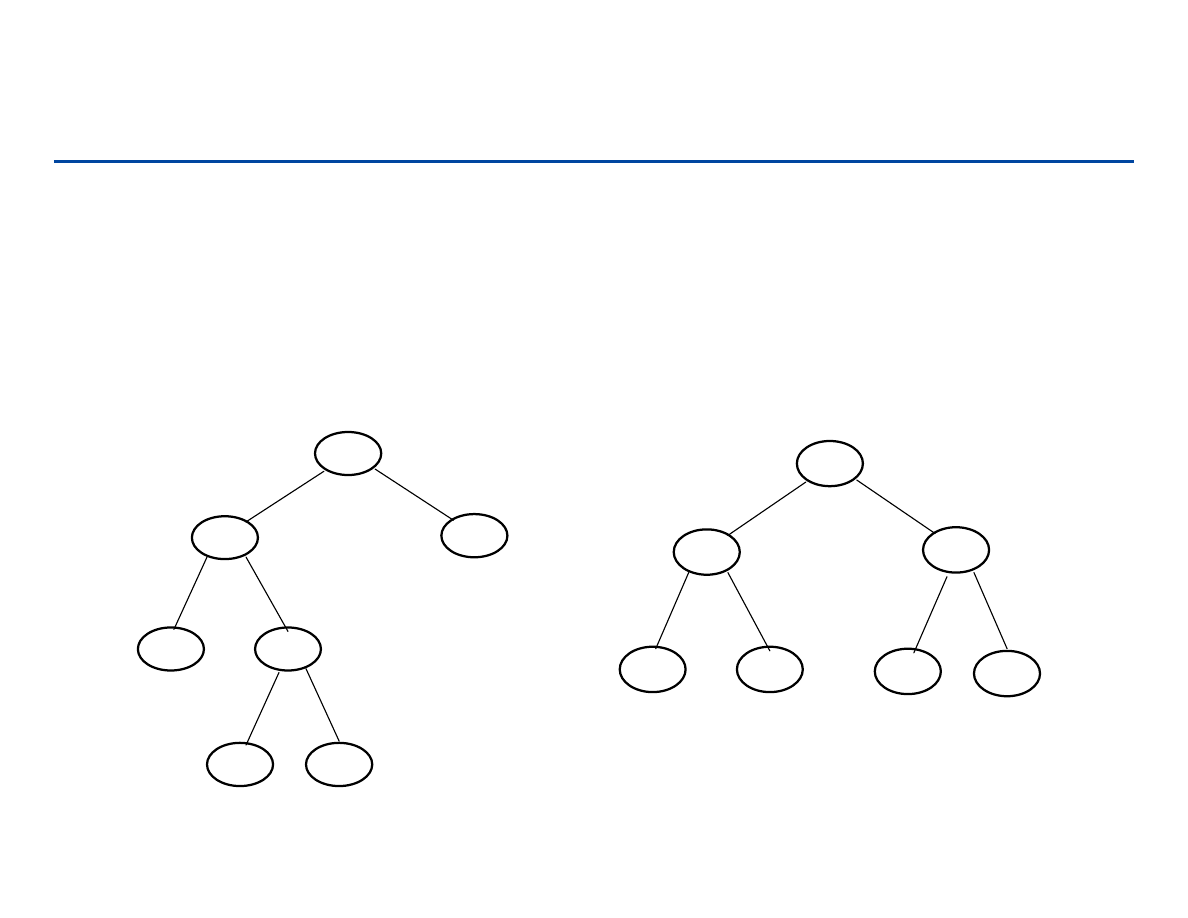
Drzewa binarne
A
B
C
F
E
D
G
≠
A
B
C
F
E
D
G
Porządek węzłów
jest istotny!!!
Drzewem binarnym T nazywamy drzewo z korzeniem, dla którego
każdy węzeł ma co najwyżej 2 potomków.
195
Drzewa pełne i drzewa kompletne
Drzewo binarne jest pełne jeśli każdy węzeł wewnętrzny ma
dokładnie dwóch potomków.
Drzewo jest kompletne jeśli każdy liść ma tę samą głębokość.
A
B
C
E
D
G
F
A
B
C
E
D
G
F
pełne
kompletne
196
Własności drzew binarnych
Ilość węzłów na poziomie d w kompletnym drzewie binarnym wynosi
2
d
Ilość węzłów wewnętrznych w takim drzewie:
1+2+4+…+2
d–1
= 2
d
–1 (mniej niż połowa!)
Ilość wszystkich węzłów:
1+2+4+…+2
d
= 2
d+1
–1
Jak wysokie może być drzewo binarne o n liściach:
(n –1)/2
Wysokość drzewa
:
2
d+1
–1= n log (n+1) –1 ≤ log (n)
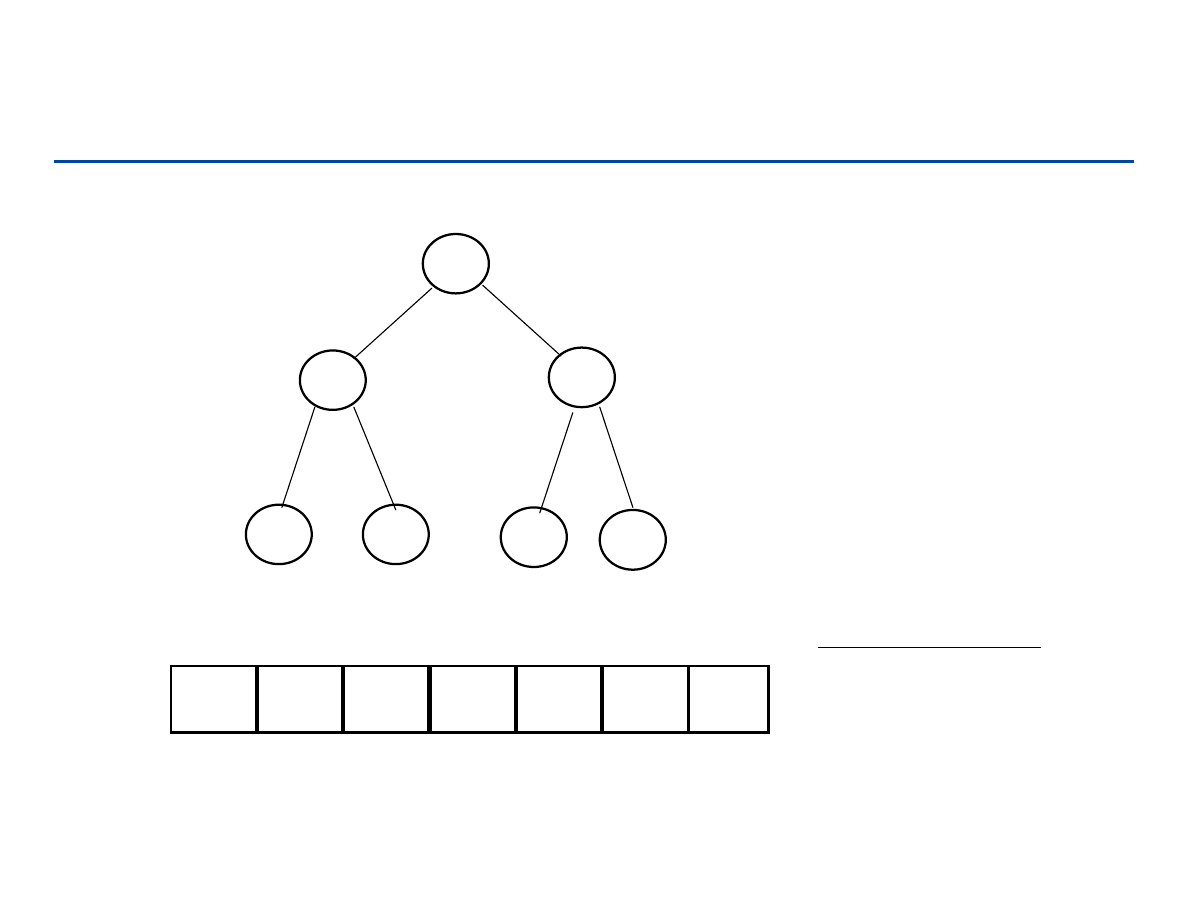
197
Tablicowa implementacja drzewa binarnego
A
B
C
E
D
G
F
1 2 3 4 5
6 7
2
0
2
1
2
2
A
B
D
C
E
F
G
0
1
2
2
Poziom
Na każdym poziomie d
mamy 2
d
elementów
Kompletne drzewo:
parent(i) = floor(i/2)
left-child(i) = 2i
right-child(i) = 2i +1
1
2
3
4
5
6
7
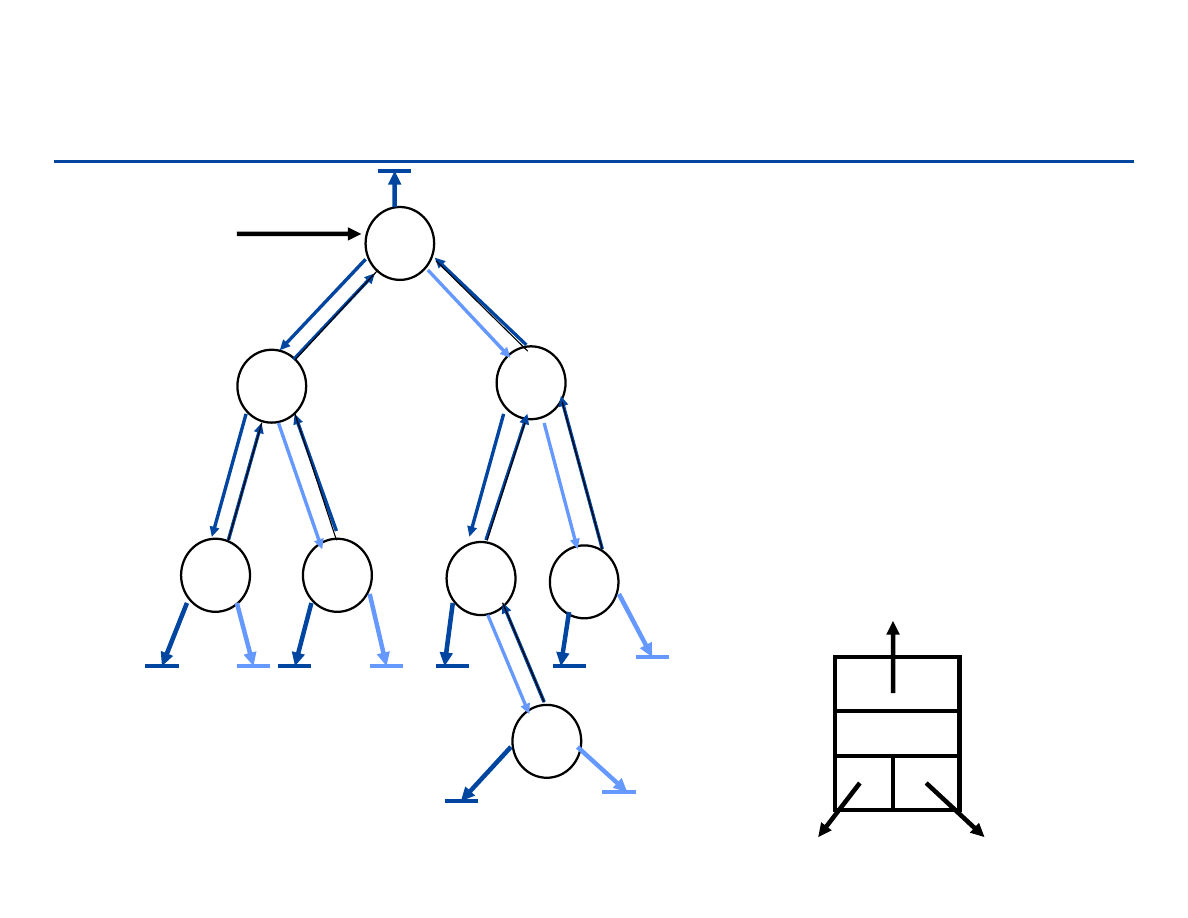
198
Listowa implementacja drzewa binarnego
A
B
C
E
D
G
F
H
Każdy węzeł zawiera
Dane oraz 3 wskaźniki:
•
przodek
•
lewy potomek
•
prawy potomek
root
(T)
data
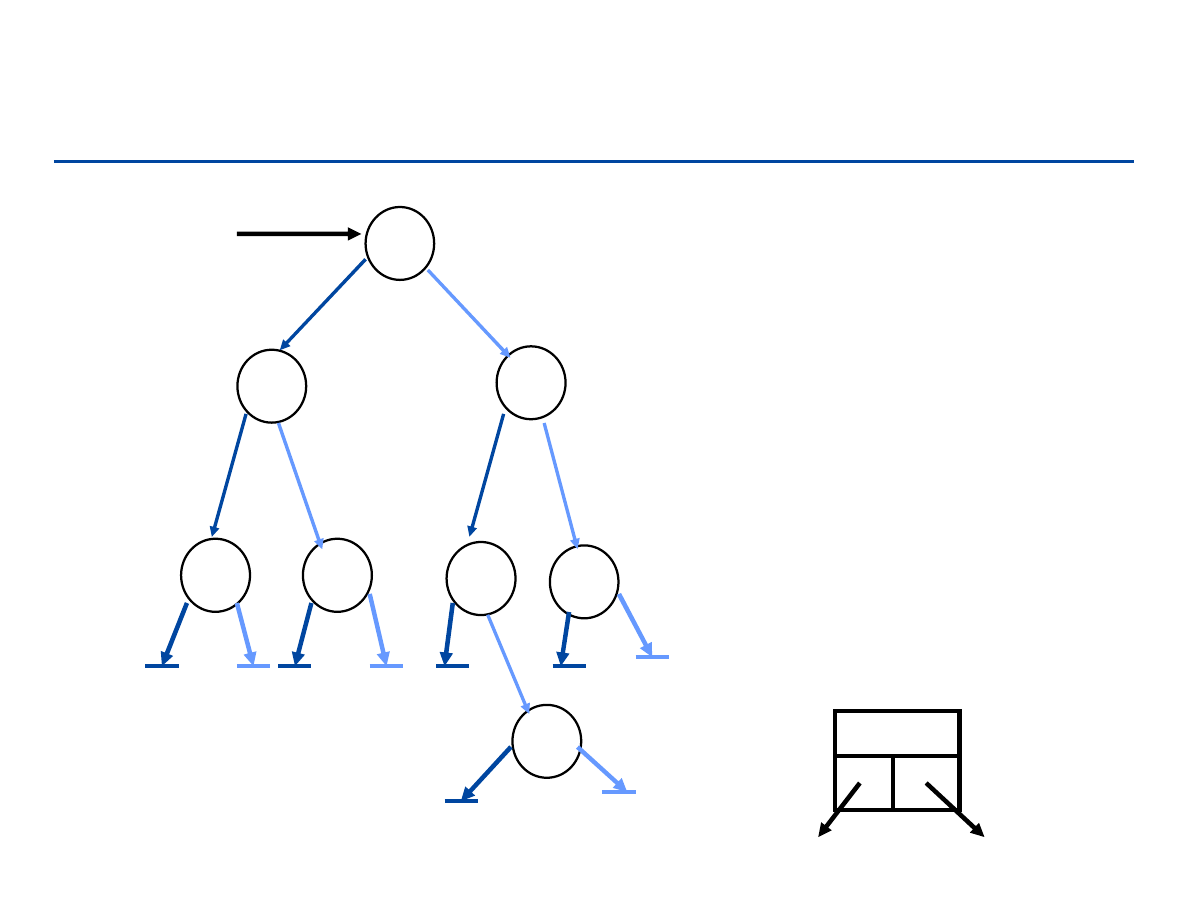
199
Listowa implementacja drzewa binarnego (najprostsza)
A
B
C
E
D
G
F
H
Każdy węzeł zawiera
Dane oraz 2 wskaźniki:
•
lewy potomek
•
prawy potomek
root
(T)
data
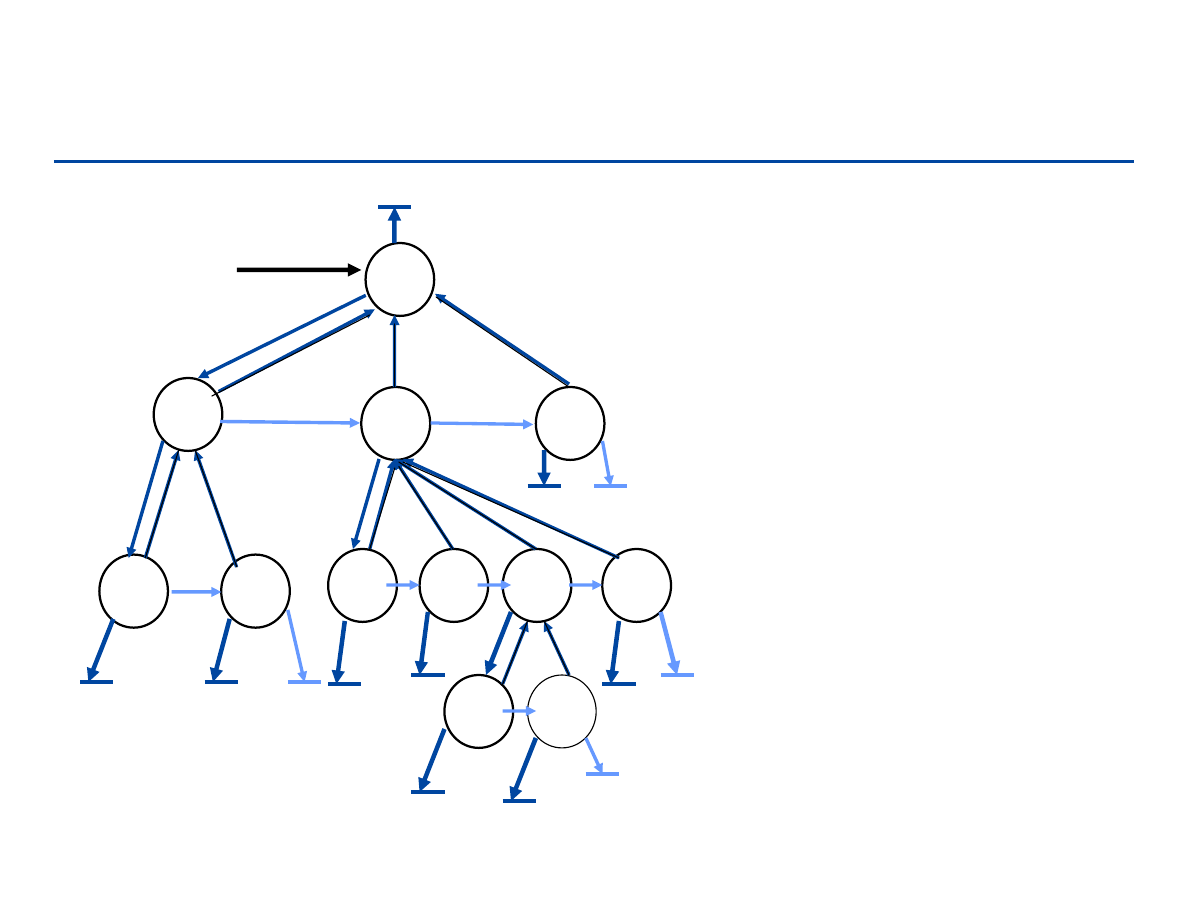
200
Listowa implementacja drzewa (n-drzewa)
A
B
D
E
D
G
Każdy węzeł zawiera
Dane oraz 3 wskaźniki:
•
przodek
•
lewy potomek
•
prawe rodzeństwo
C
root
(T)
F
H
I
J
K
201
Drzewa poszukiwań
binarnych (BST)
202
O czym będziemy mówić
Definicja
Operacje na drzewach BST:
– Search
– Minimum, Maximum
– Predecessor, Successor
– Insert, Delete
Struktura losowo budowanych drzew BST
203
Wprowadzenie
Poszukujemy dynamicznego ADT, który efektywnie będzie obsługiwał
następujące operacje:
– Wyszukiwanie elementu (Search)
– Znajdowanie Minimum/Maximum
– Znajdowanie poprzednika/następnika (Predecessor/Successor)
– Wstawianie/usuwanie elementu (Insert/Delete)
Wykorzystamy drzewo binarne! Wszystkie operacje powinny zajmować
czas Θ(lg n)
Drzewo powinno być zawsze zbalansowane – inaczej czas będzie
proporcjonalny do wysokości drzewa (gorszy od O(lg n))!
204
Drzewo poszukiwań binarnych (binary search tree)
Struktura drzewa z korzeniem
Każdy węzeł x posiada pola left(x), right(x), parent(x), oraz key(x).
Własność drzewa BST:
Niech x będzie dowolnym węzłem drzewa, natomiast niech y będzie
należał do poddrzewa o korzeniu w x wtedy:.
– Jeżeli należy do lewego poddrzewa to: key(y) ≤ key(x)
– Jeżeli należy do prawego poddrzewa to : key(y)
> key(x)
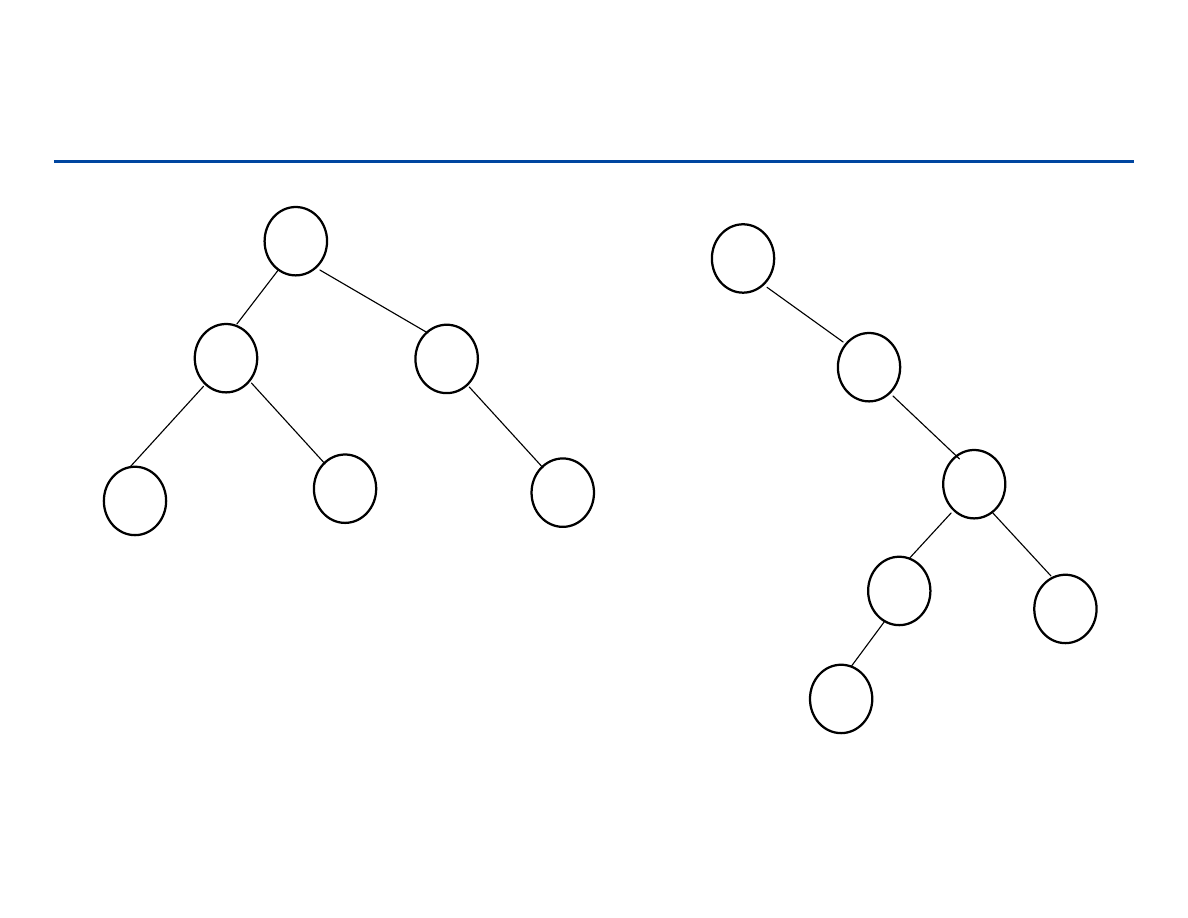
205
Przykład BST
5
3
5
5
7
8
2
3
7
2
8
5
Metody przechodzenia przez drzewo :
In-order, pre-order, post-order
206
Tree-Search
(x,k)
if
x = null or k = key[x]
then return
x
if
k < key[x]
then return
Tree-Search(left[x],k)
else return
Tree-Search(right[x],k)
Tree-Search
(x,k)
while
x ≠ null and k ≠ key[x]
do if
k < key[x]
then
x
left[x]
else
x
right[x]
return
x
Poszukiwanie w drzewie BST
rekurencyjnie
iteracyjnie
złożoność: O(h)
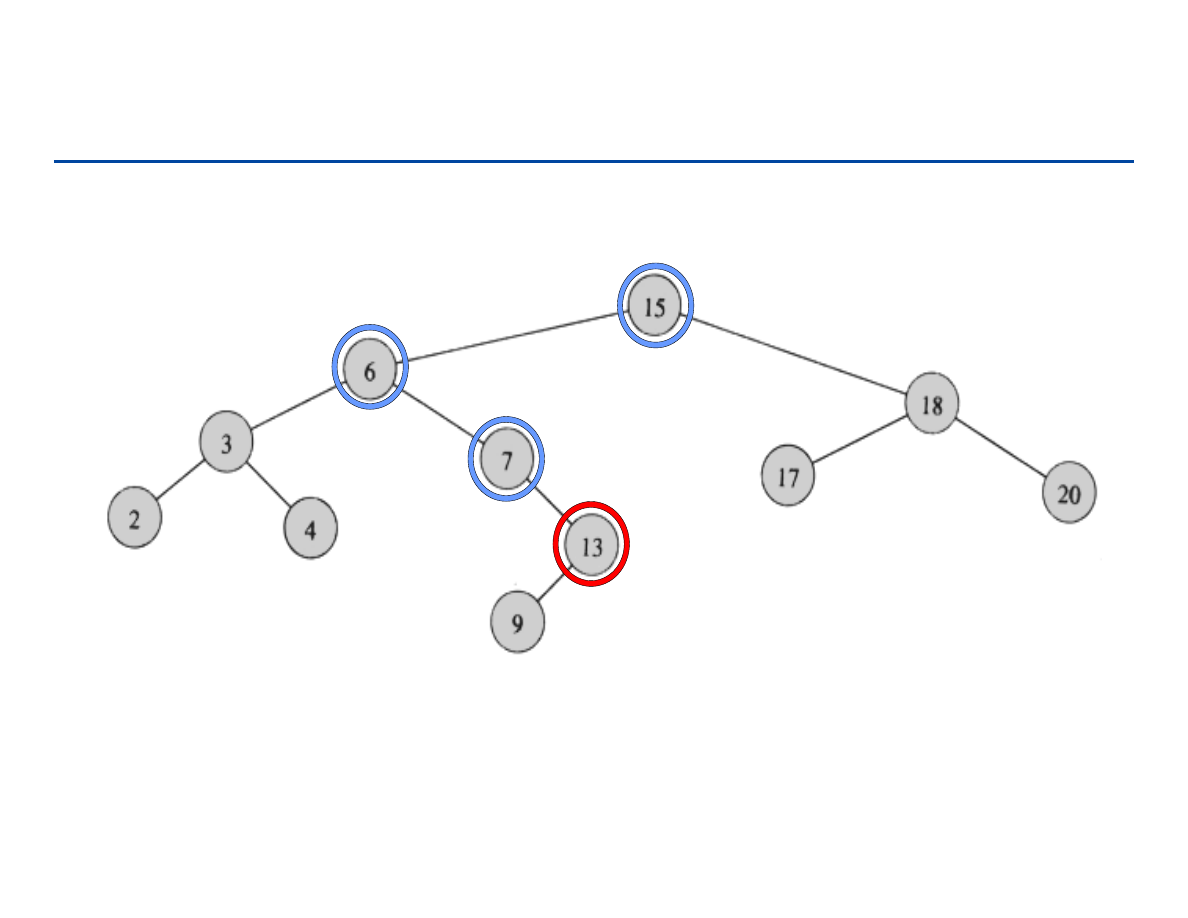
207
Przykład
Poszukiwany klucz: 13
208
Przechodzenie przez wszystkie węzły drzewa
Inorder-Tree-Walk(x)
if x ≠ null
then Inorder-Tree-Walk(left[x])
print key[x]
Inorder-Tree-Walk(right[x])
złożoność: Θ(n)
czas wykonania:
T(0) = Θ(1)
T(n)=T(k) + T(n – k –1) + Θ(1)
209
Tree-Minimum
(x)
while
left[x] ≠ null
do
x
left[x]
return
x
Tree-Maximum
(x)
while
right[x] ≠ null
do
x
right[x]
return
x
Odnajdowanie minimum i maksimum
złożoność: O(h)
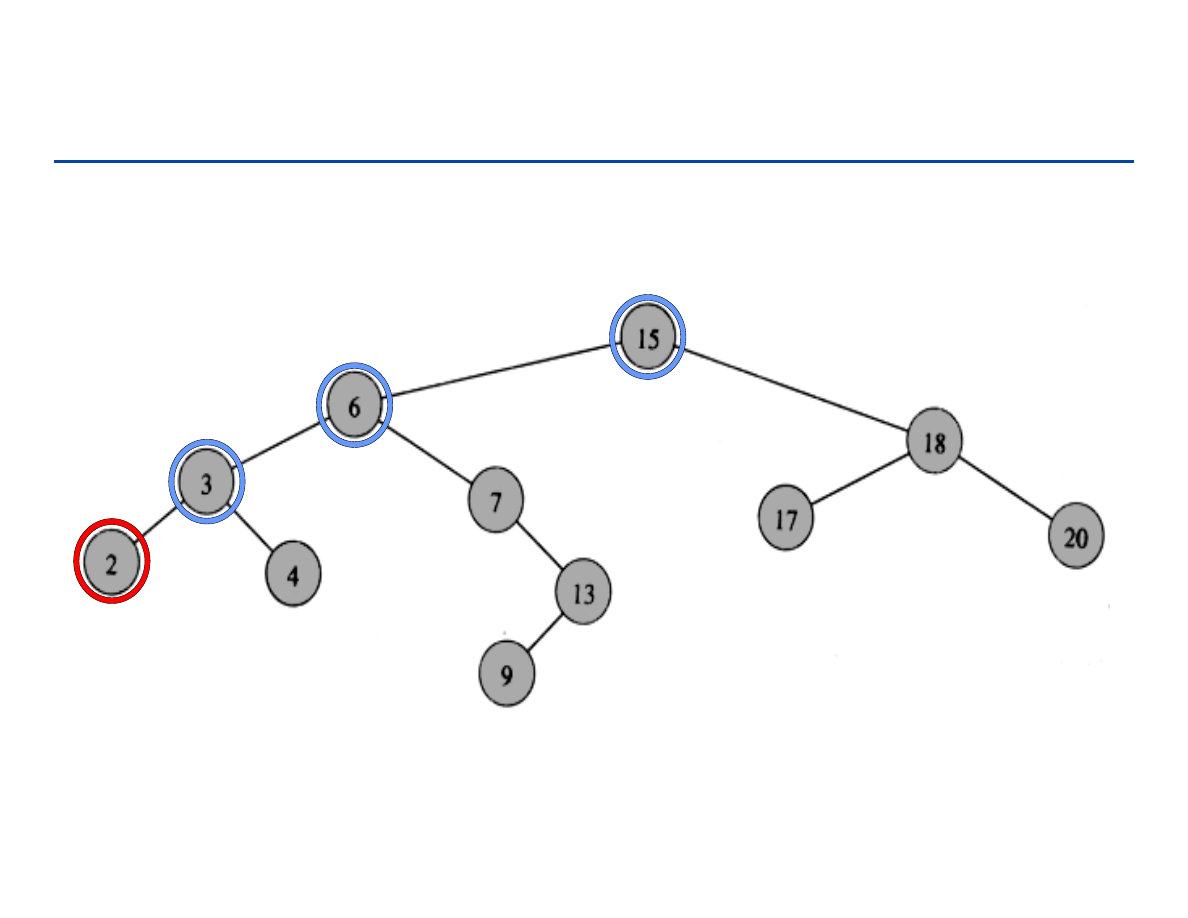
210
Przykład – minimum
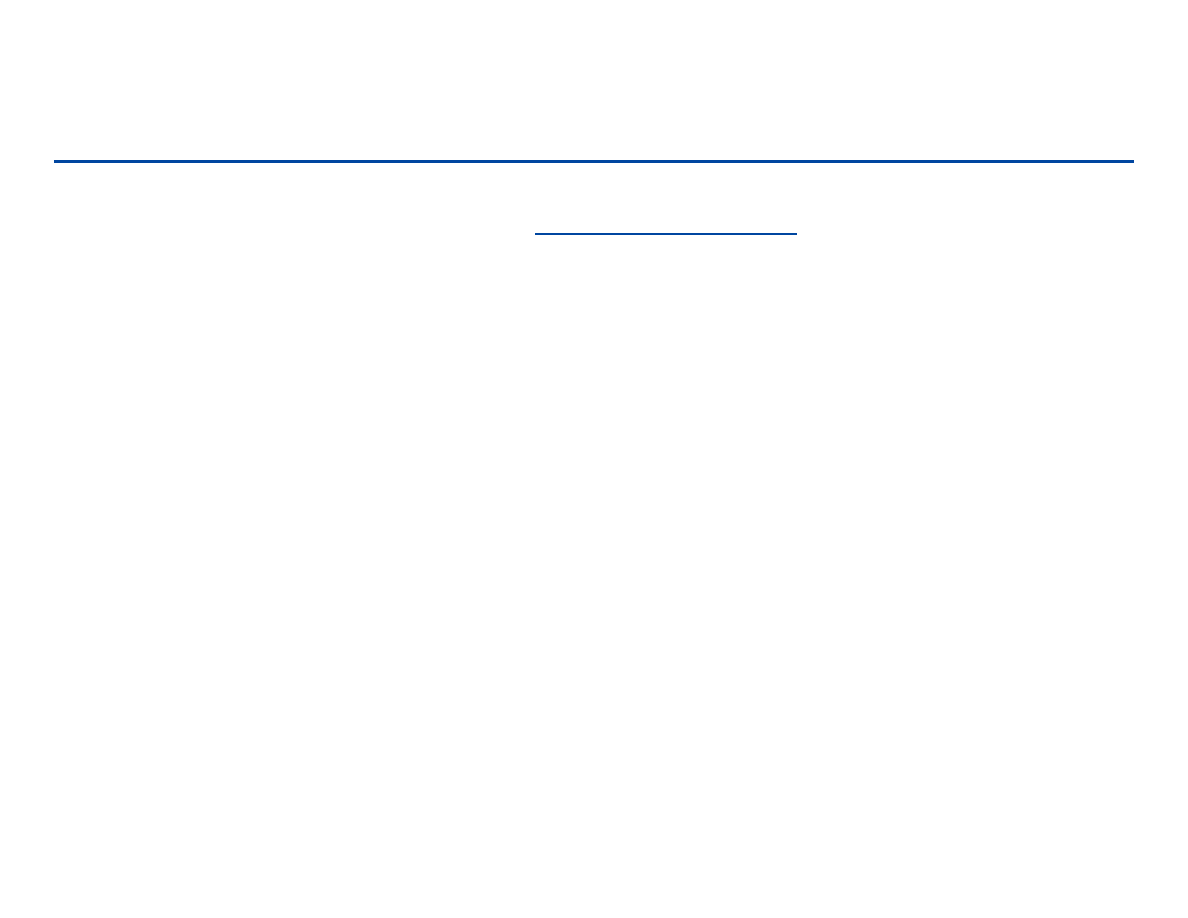
211
Odnajdowanie następnika
Następnikiem x nazywamy najmniejszy element y wśród elementów
większych od x
Następnik może zostać odnaleziony bez porównywania kluczy. Jest
to :
1.
null jeśli x jest największym z węzłów.
2.
minimum w prawym poddrzewie t jeśli ono istnieje.
3.
najmniejszy z przodków x, dla których lewy potomek jest
przodkiem x.
212
Odnajdowanie następnika
x
minimum w prawym poddrzewie t
y
z
x
najmniejszy z przodków x,
dla których lewy potomek
jest przodkiem x
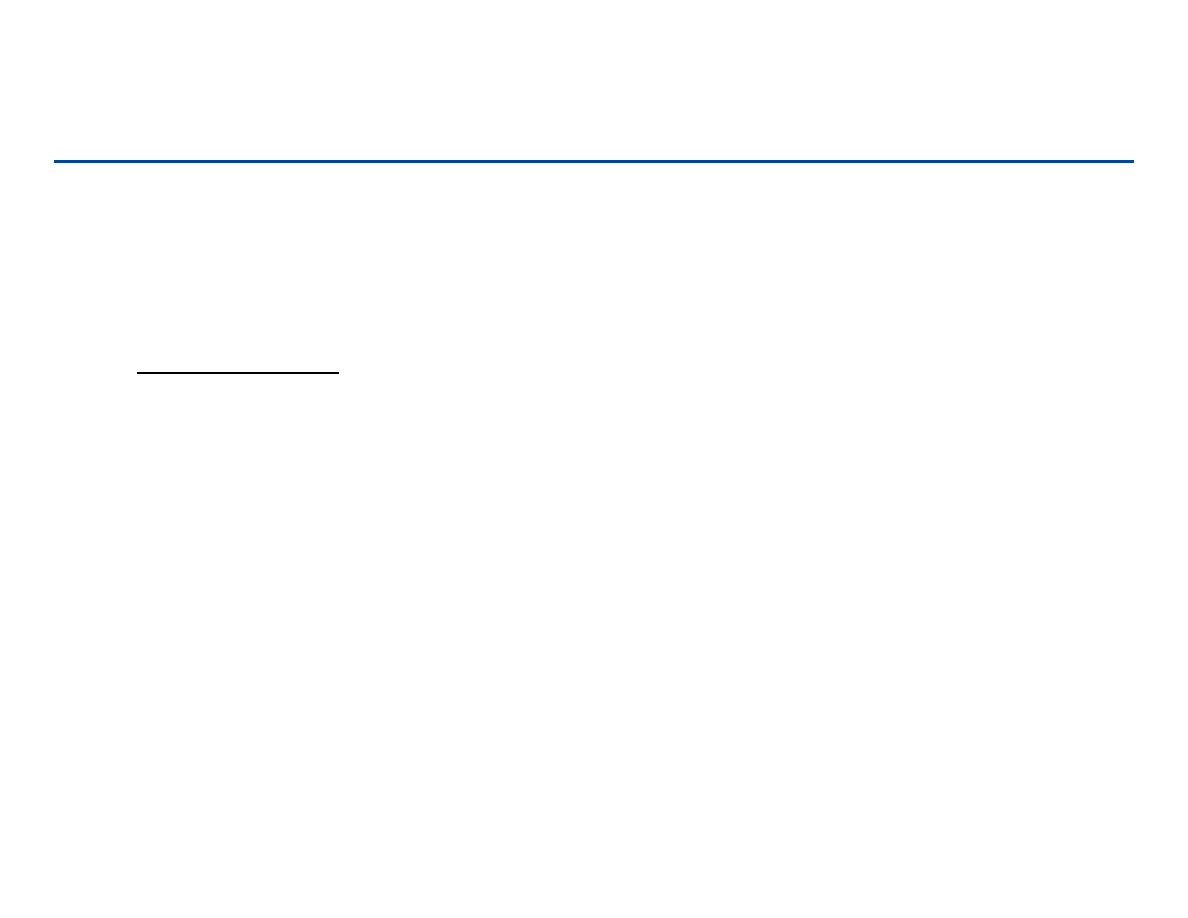
213
Odnajdowanie następnika
Tree-Successor(x)
if right[x] ≠ null
// przypadek 2
then return Tree-Minimum(right[x])
y parent[x]
while y ≠ null and x = right[y]
// przypadek 3
do x y
y parent[y]
return y
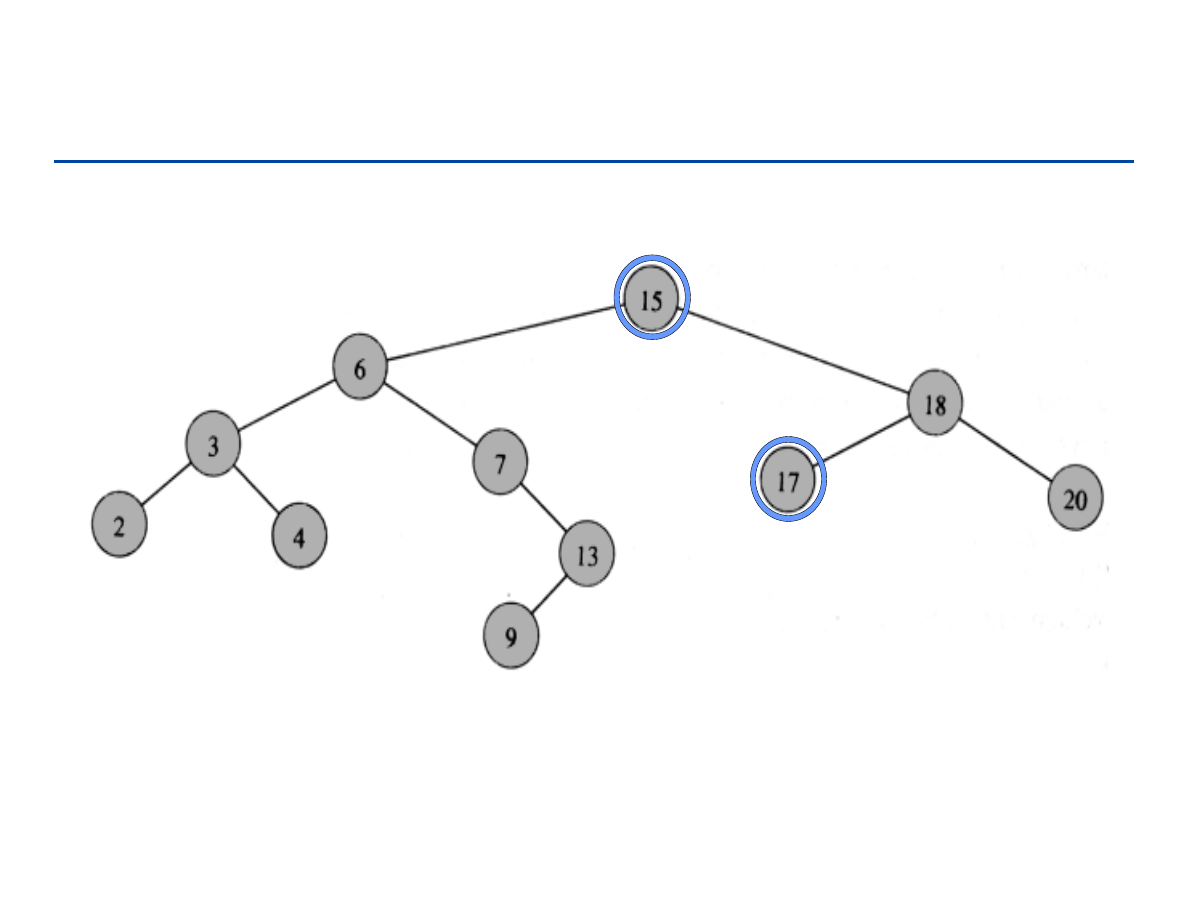
214
Przykład
Poszukajmy następników dla 15 (przyp. 2), 13 (przyp. 3)
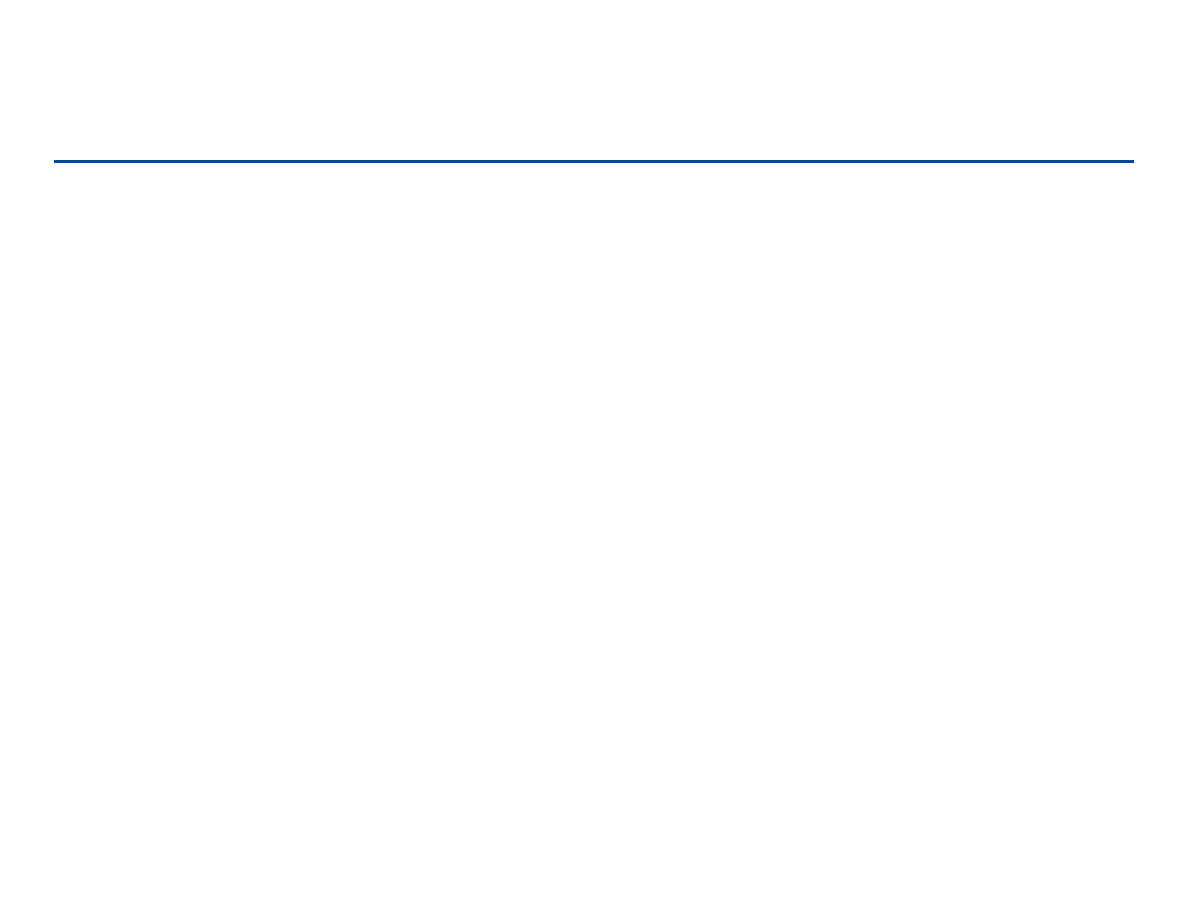
215
Wstawianie elementów
Wstawianie jest bardzo zbliżone do odnajdowania elementu:
– Odnajdujemy właściwe miejsce w drzewie, w które chcemy wstawić
nowy węzeł z.
Dodawany węzeł z zawsze staje się liściem.
Zakładamy, że początkowo left(z) oraz right(z) mają wartość null.
216
Wstawanie – przykład
12
5
9
18
19
15
17
2
13
Wstawiamy 13 do drzewa
z
217
Wstawianie – pseudokod
Tree-Insert(T,z)
y null
x root[T]
while x ≠ null
do y x
if key[z] < key[x]
then x left[x]
else x right[x]
parent[z] y
// dla pustego drzewa
if y = null then root[T] z
else if key[z] < key[y]
then left[y] z
else right[y] z
218
Usuwanie z drzewa BST
Usuwanie elementu jest bardziej skomplikowane niż wstawianie. Można
rozważać trzy przypadki usuwania węzła z:
1.
z nie ma potomków
2.
z ma jednego potomka
3.
z ma 2 potomków
przypadek 1: usuwamy z i zmieniamy u rodzica wskazanie na null.
przypadek 2: usuwamy z a jego dziecko staje się dzieckiem rodzica.
przypadek 3:najbardziej złożony; nie można po prostu usunąć węzła i
przenieść dzieci do rodzica – drzewo przestałoby być binarne!
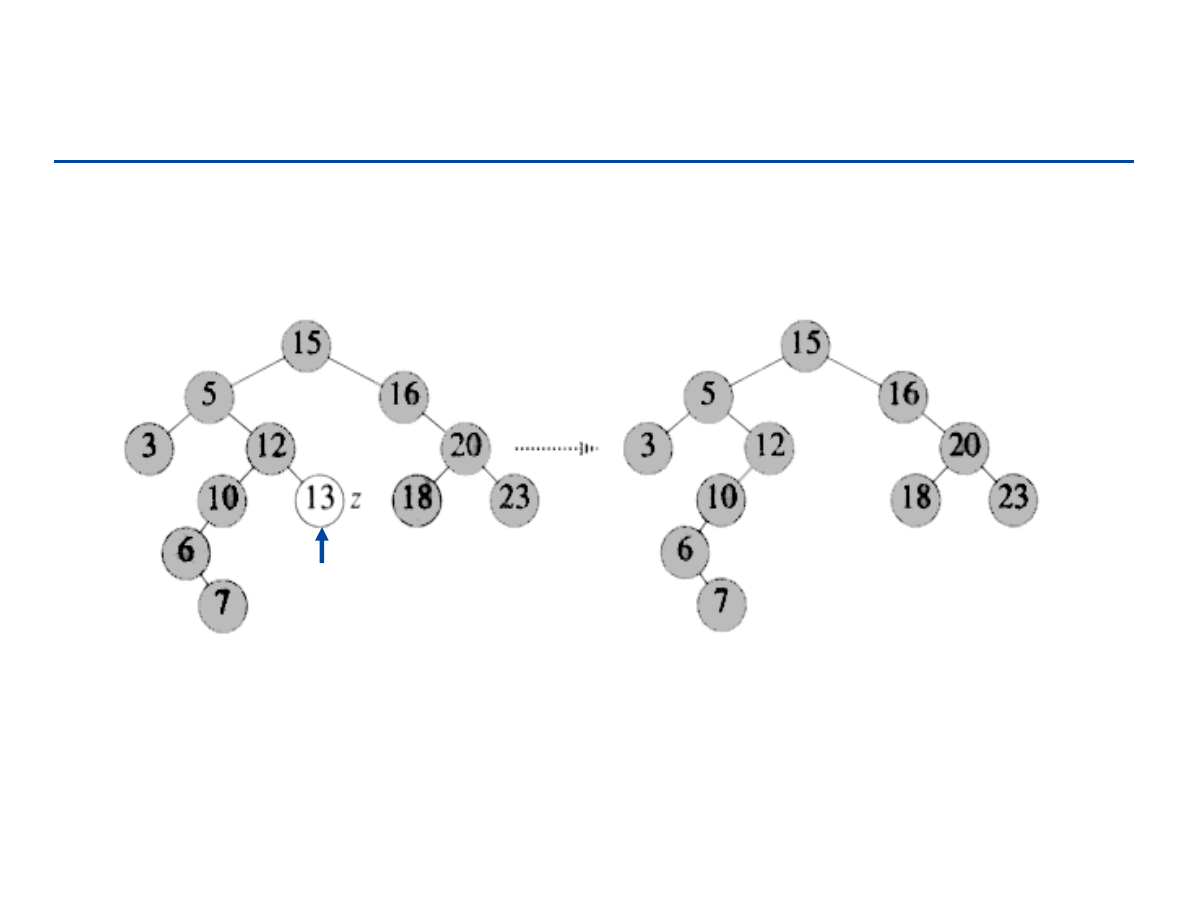
219
delete
Usuwanie z drzewa BST - przypadek 1
usuwamy
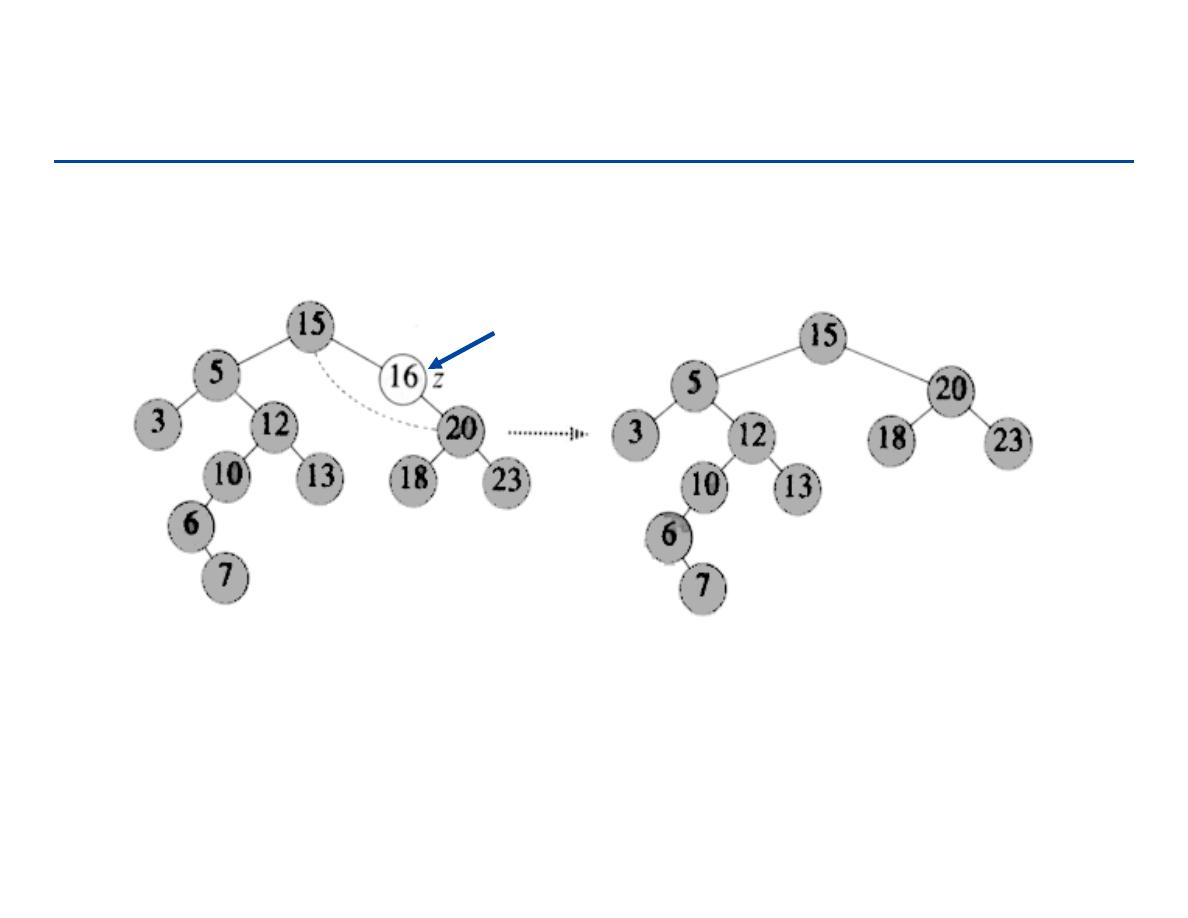
220
Usuwanie z drzewa BST przypadek 2
Usuwany
węzeł
221
Usuwanie z drzewa BST
przypadek 3
Rozwiązanie polega na zastąpieniu węzła jego następnikiem.
założenie: jeśli węzeł ma dwóch potomków, jego następnik ma co
najwyżej jednego potomka.
dowód: jeśli węzeł ma 2 potomków to jego następnikiem jest minimum z
prawego poddrzewa. Minimum nie może posiadać lewego potomka
(inaczej nie byłoby to minimum)
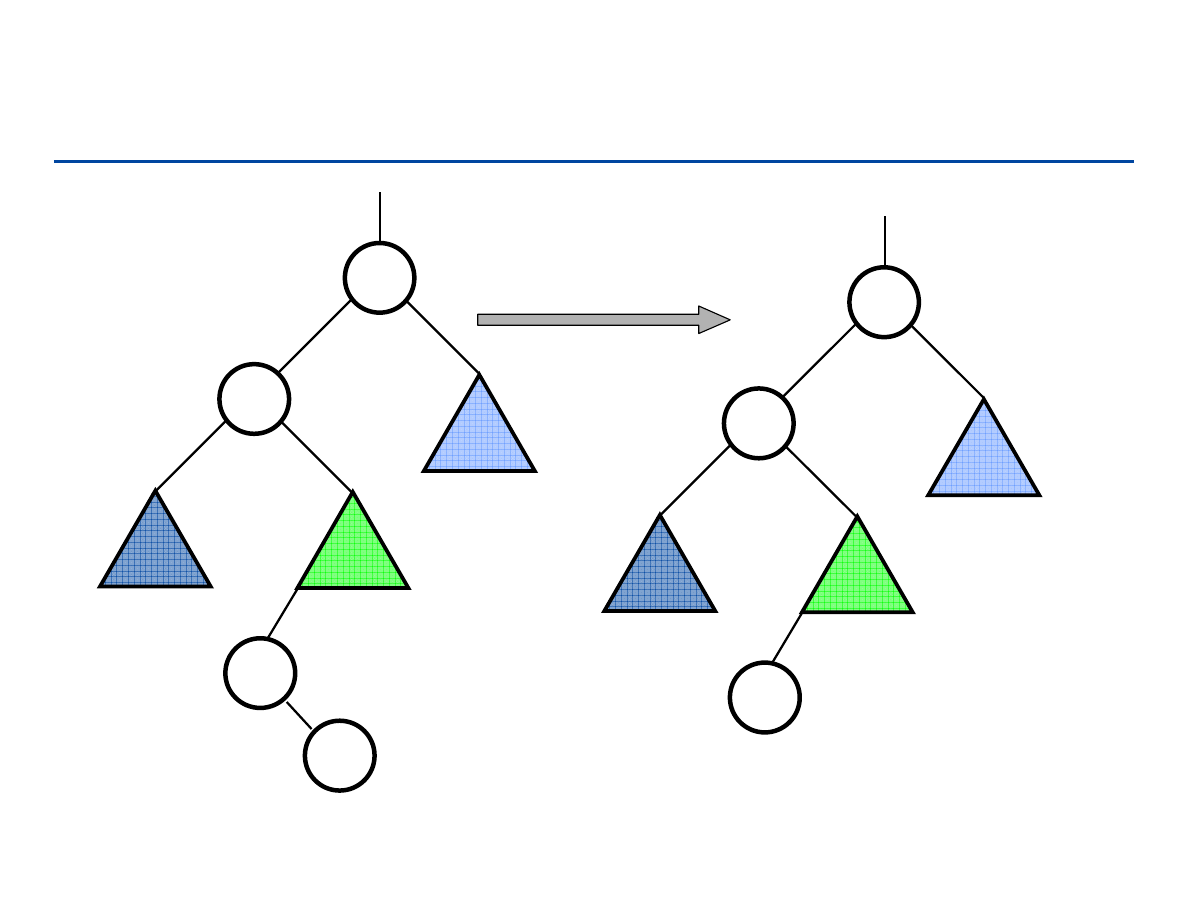
222
Usuwanie z drzewa BST – przypadek 3
z
α
β
δ
Usuwamy
z
y
w
y
α
β
δ
w
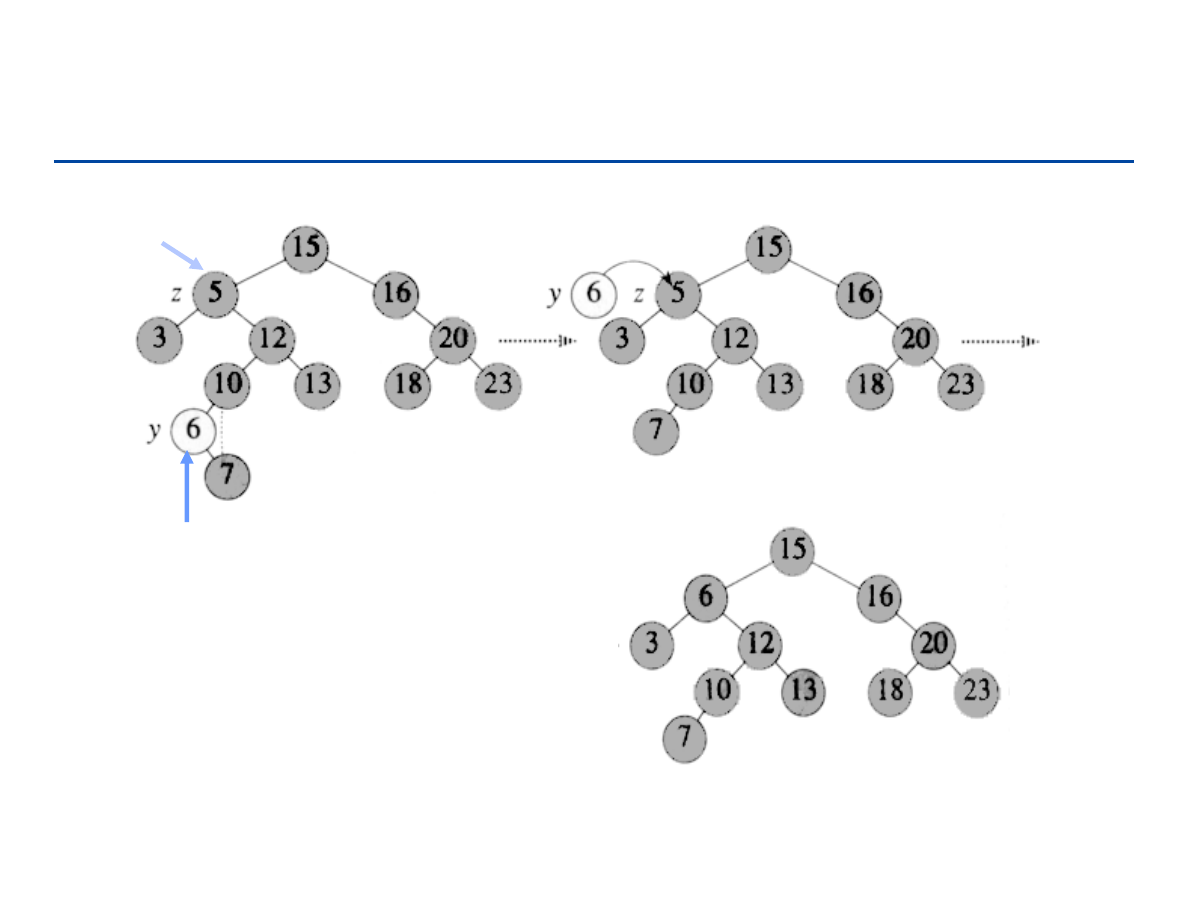
223
Usuwanie z drzewa BST – przypadek 3
usuwamy
następnik
224
Usuwanie z drzewa BST – pseudokod
Tree-Delete
(T,z)
if
left[z] = null or right[z] = null /* p. 1 lub 2
then
y
z
else
y
Tree-Successor(z)
if
left[y] ≠ null
then
x
left[y]
else
x
right[y]
if
x ≠ null
then
parent[x]
parent[y]
if
parent[y] = null
then
root[T]
x
else if
y = left[parent[y]]
then
left[parent[y]]
x
else
right[parent[y]]
x
if y ≠ z
then key[z] key[y]
return y
225
Analiza złożoności
Usuwanie: dwa pierwsze przypadki wymagają O(1) operacji: tylko
zamiana wskaźników.
Przypadek 3 wymaga wywołania Tree-Successor, i dlatego wymaga
czasu O(h).
Stad wszystkie dynamiczne operacje na drzewie BST zajmują czas O(h),
gdzie h jest wysokością drzewa.
W najgorszym przypadku wysokość ta wynosi O(n)
Wyszukiwarka
Podobne podstrony:
Algorytmy wyklady, Metody tworzenia algorytmów
Algorytmy wyklady, Elementarne struktury danych
Algorytmy wyklady, Złożoność obliczeniowa algorytmów
Pojęcie algorytmu, wykłady i notatki, dydaktyka matematyki, matematyka przedszkole i 1-3
Algorytmy wyklad 1 id 57804 Nieznany
Algorytmy wyklad 9 10 id 57807 Nieznany (2)
Algorytmy wyklady, Listy
Algorytmy wyklad 6 7 id 57806 Nieznany
algorytmy wykładu
Inforamtyka Algorytmy wyklady
Algorytmy wyklad 4 5 id 57805 Nieznany
Algorytmy wyklady, Programowanie dynamiczne, MATRIX-CHAIN-ORDER ( p );
Algorytmy wyklady, Intersect, ANY-SEGMENTS_INTERSECT (S);
Algorytmy wykład
Algorytmy wykład2
Algorytmy wyklad 4 5
Algorytmy wyklady, Metody tworzenia algorytmów
Algorytmy wyklady, Elementarne struktury danych
więcej podobnych podstron