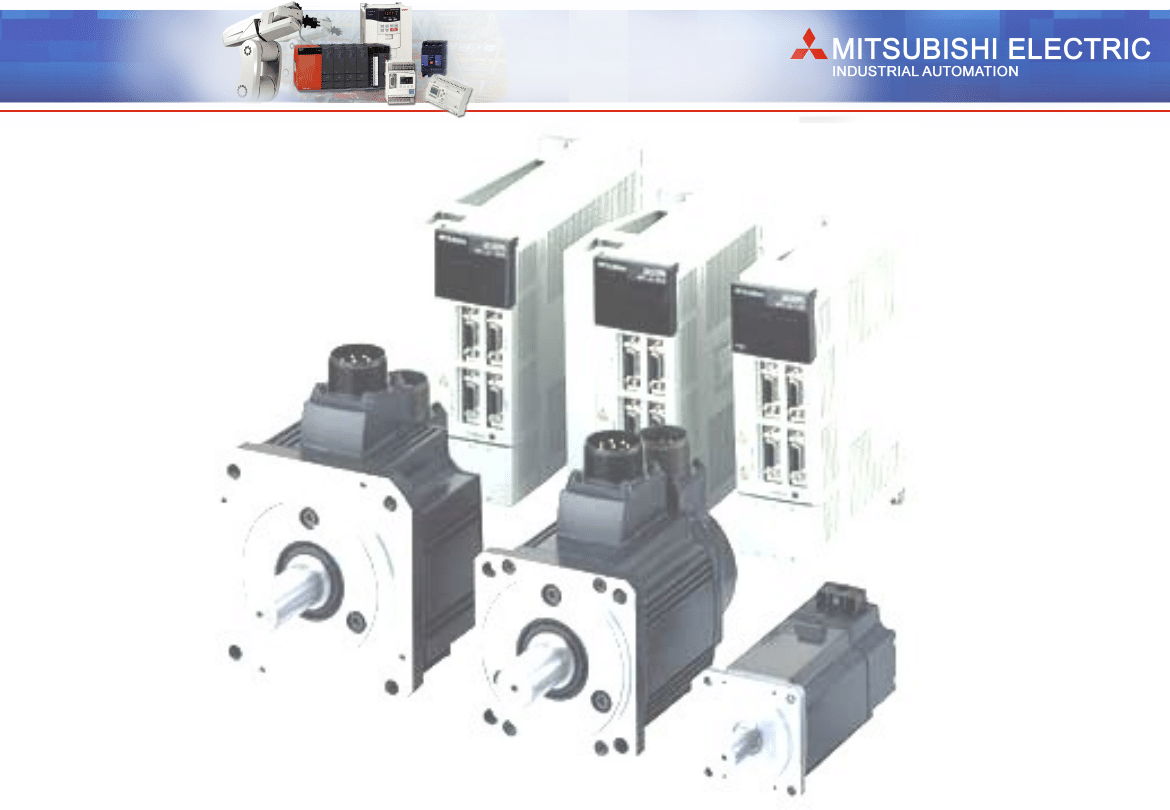
Serwonapędy
1
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
MR-J2S-CL
MR-J2S-CL
Serwowzmacnia
Serwowzmacnia
cz
cz
Programowalny
Programowalny
Następca serii MR-J2C-
Następca serii MR-J2C-
S100
S100
Serwonapędy
2
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
MR-J2S-CL
Kompatybilny z urządzeniami podstawowej serii
MR-J2S
Łatwy, uproszczony język programowania
Możliwość zapisania 120 kroków programowych
Możliwość jednoczesnego zapamiętania 16
programów, wybieranych do wykonania sygnałem
stykowym lub przez złącze szeregowe
Uniwersalne złącze szeregowe, przełączane
programowo jako RS232 lub RS485 – komunikacja
sieciowa max. 32 urządzeń
Program narzędziowy dla Windows
Serwonapęd AC z wbudowanym sterownikiem
pozycjonowania
Serwonapędy
3
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Nowe funkcje i możliwości
1.
Przejście od funkcjonalności serii
MR-J2 do funkcjonalności MR-J2S
2.
Rozszerzenie możliwości
programowych serii MR-J2C-S100:
• 16 programów
• Łącznie 120 kroków programu
• Nowe instrukcje
• 4 rejestry EEPROM i 4 RAM
Wprowadzenie serii MR-J2S-CL
zapewniło:
Serwonapędy
4
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Nowe funkcje i możliwości (1)
Pozycja
MR-J 2S-CL
MR-J 2C-S100
Ilość kroków
programu
120 kroków
60 kroków
Ilość rejestrów
danych
EEPROM – 4
RAM – 4
EEPROM – 2
RAM – 2
Instrukcje przyrostowe
(w systemie absolutnym):
MOVI
MOVIA
TRIPI (w połączeniu z MOVI/MOVIA)
brak
Instrukcje
programowe
Nowa funkcja: przerwanie
ITP
brak
Serwonapędy
5
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
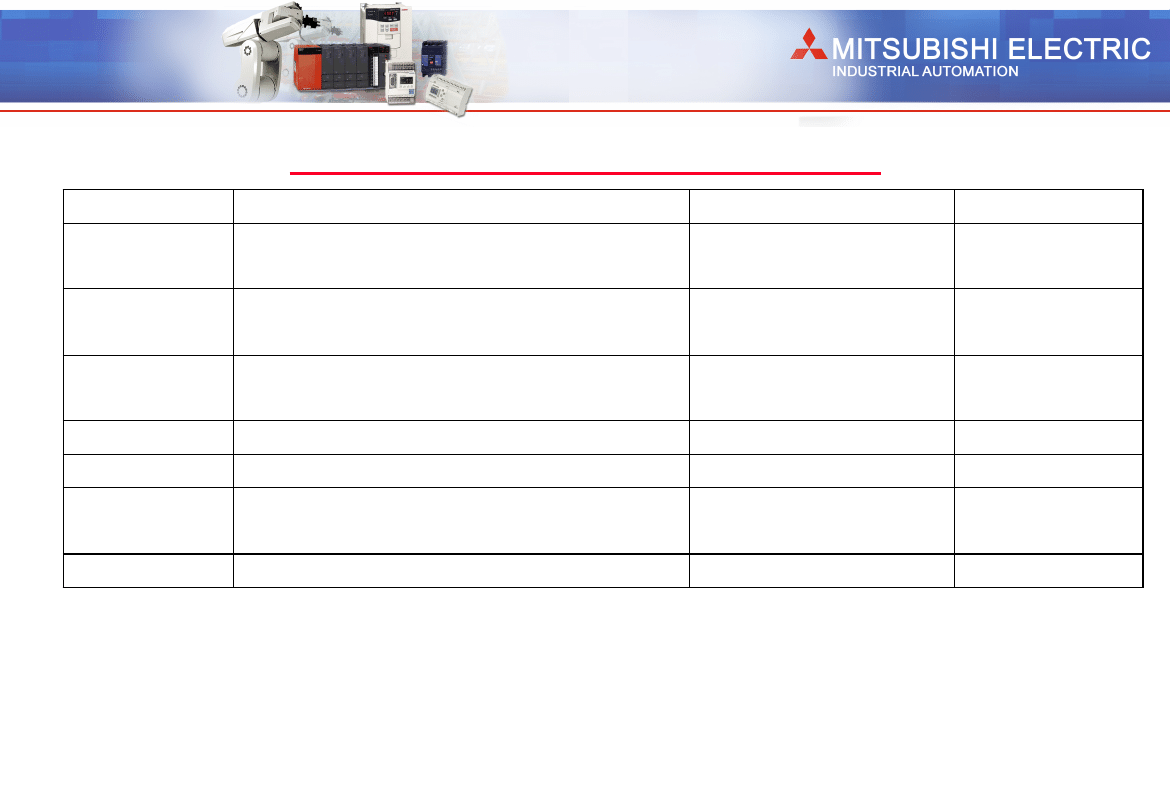
Nowe funkcje i możliwości (2)
Pozycja
MR-J 2S-CL
MR-J 2C-S100
Nowa funkcja: czas nieliniowego
odcinka krzywej sinoidalnej,
zadawany instrukcją programu
STD
Tylko wartość
parametru
Nowa funkcja:
Powtórzenie wybranych kroków
programu
FOR-NEXT
brak
Instrukcje
programowe
Nowa funkcja:
Zapamiętanie bieżącej pozycji
LPOS
brak
Serwonapędy
6
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Nowe funkcje i możliwości (3)
Pozycja
MR-J 2S-CL
MR-J 2C-S100
Nowe modele:
1x100VAC: 50W - 400W
3x200VAC: 5kW, 7kW
Brak
50W - 3,5kW
Wejście generatora impulsów:
Max. 500kHz
Max. 400kHz
Rozdzielczość enkodera:
Dane techniczne
serwowzmacniaczy
i serwosilników
131072 imp./obr.
(17 bit)
8192 / 16384 imp./obr.
(13bit) / (14bit)
Pozostałe
parametry:
J ak MR-J 2S-A
J ak MR-J 2-A
Oprogramowanie
narzędziowe:
SETUP121E
SETUP71E
Serwonapędy
7
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
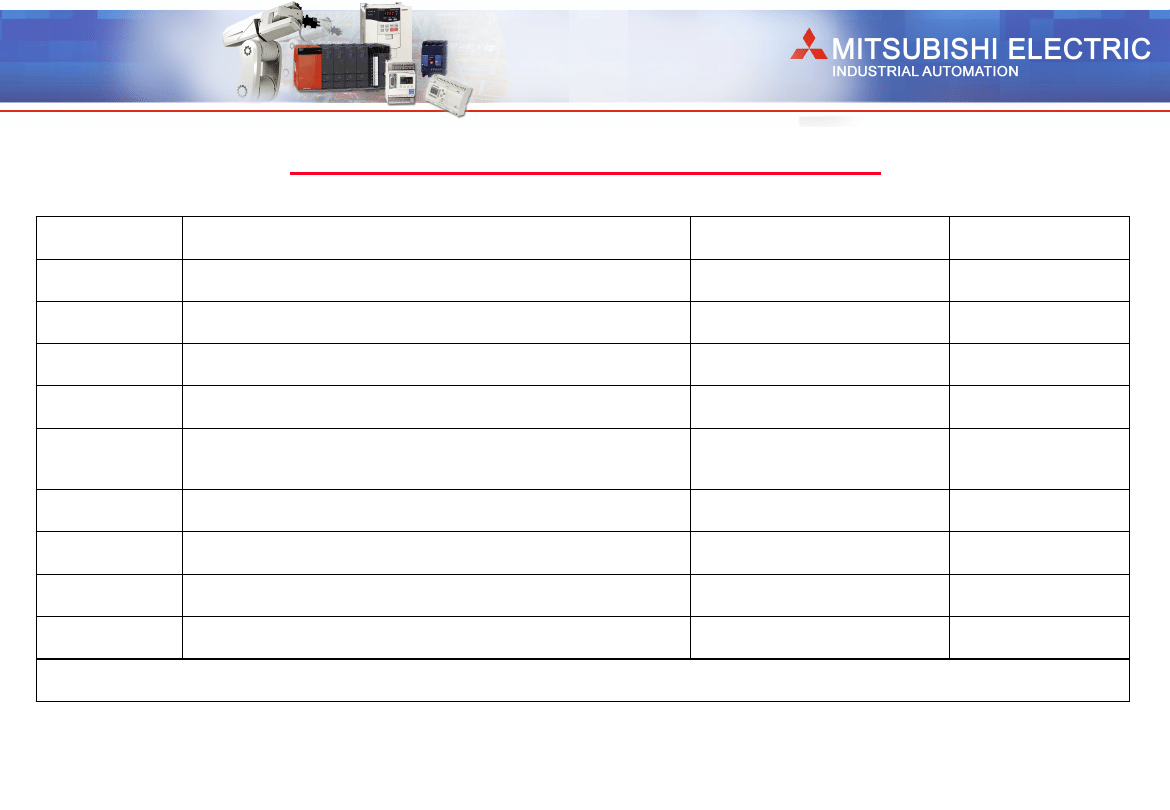
Język programowania (1)
Instrukcja
Nazwa
Zakres wartości
J ednostka
SPN
Prędkość silnika
0 – max.
obr/min
STC
Czas rozpędzania/ hamowania
0 – 20000
ms
STA
Czas rozpędzania
0 – 20000
ms
STB
Czas hamowania
0 – 20000
ms
STD
Czas nieliniowego odcinka krzywej S
(zastępuje Pr. 14)
0 – 100
ms
MOV
Przemieszczenie absolutne
-999999 – 999999
x 10
STM
μm
MOVI
Przemieszczenie inkrementalne
-999999 – 999999
x 10
STM
μm
MOVA
Kontynuacja przemieszczenia abs.
-999999 – 999999
x 10
STM
μm
MOVIA
Kontynuacja przemieszczenia inkr.
-999999 – 999999
x 10
STM
μm
Kolorem czerwonym
wyróżniono nowe instrukcje.
Serwonapędy
8
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
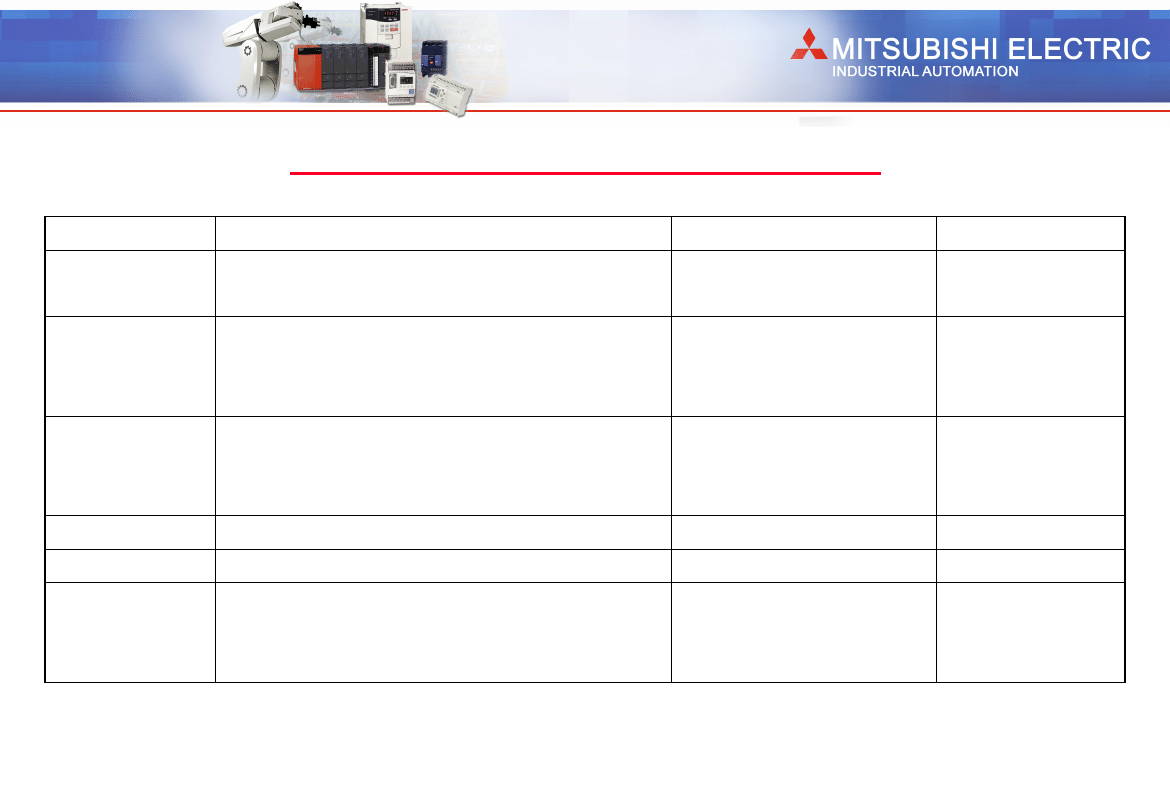
Język programowania (2)
Instrukcja
Nazwa
Zakres wartości
J ednostka
SYNC (n)
Oczekiwanie na stan ON sygnału
na wejściu PI(n)
n=1,2,3
nr wejścia
OUTON (n)
Ustawienie ON wyjścia OUT n
(do instrukcji OUTOF
lub na czas,
zadany Pr. 74 – 76
)
n=1,2,3
nr wyjścia
OUTOF (n)
Ustawienie OFF wyjścia OUT n,
ustawionego ON instrukcją
OUTON
n=1,2,3
nr wyjścia
TRIP
Absolutna pozycja dojścia
-999999 – 999999 x 10
STM
μm
TRIPI
Inkrementalna pozycja dojścia
-999999 – 999999 x 10
STM
μm
ITP
(tylko z SYNC)
Przerwanie pozycjonowania na
zadanej pozycji (inkrementalnie
od sygnału wg instrukcji SYNC)
0 – 999999
x 10
STM
μm
Serwonapędy
9
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Język programowania (3)
Uwaga: Parametr 1 :
X
STM - mnożnik wartości pozycji
0: 1
zadanej w
programie
1: 10
2: 100
3: 1000
Instrukcja
Nazwa
Zakres wartości
J ednostka
COUNT
Zliczanie zewnętrznych impulsów
do zadanej wartości
-999999 – 999999
impulsów
(0 = reset)
FOR-NEXT
Powtarza kroki zawarte między
FOR(n) i NEXT n razy
0, 1 – 10000
razy (0=bez
ograniczenia)
LPOS
Zapamiętanie pozycji bieżącej w
chwili podania sygnału LPS
w rejestrze R5
TIM
Pauza wykonania programu
1 – 2000
x10ms
ZRT
Powrót do punktu zerowego
TIMES
Powtórzenie całego programu
0, 1 – 10000
razy (0=bez
ograniczenia)
STOP
Koniec programu
Serwonapędy
10
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
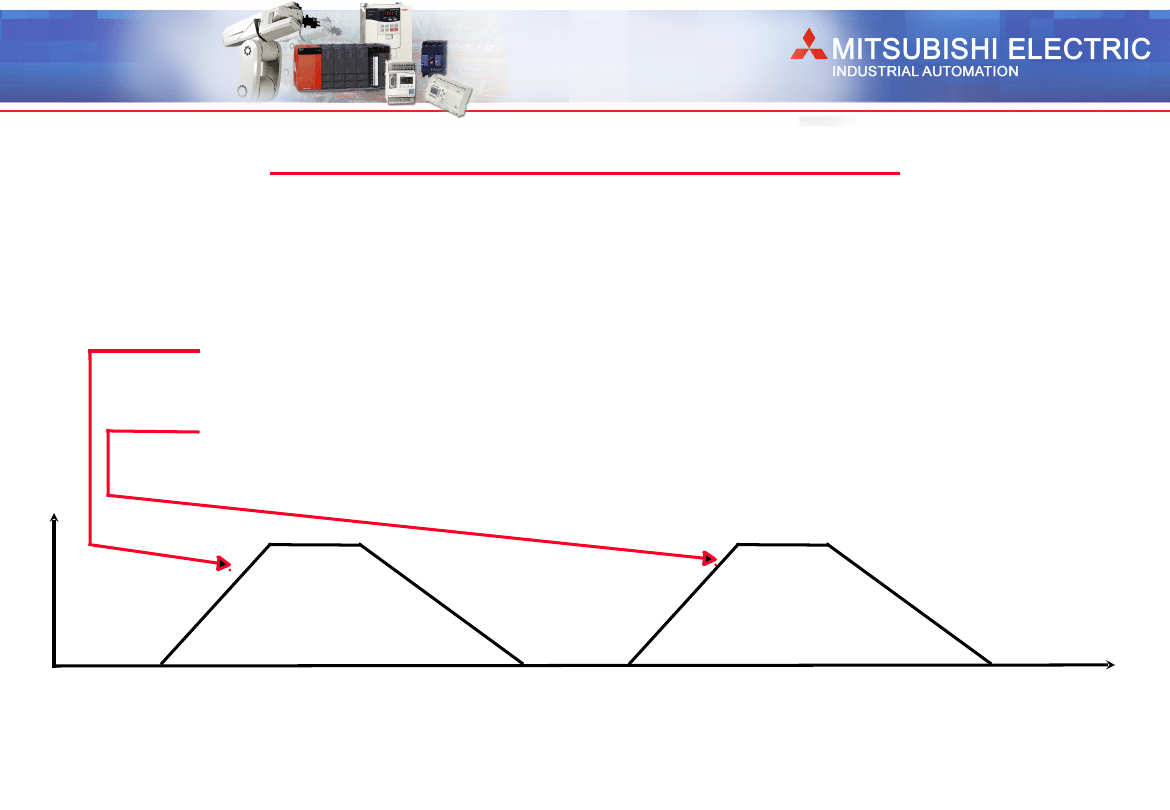
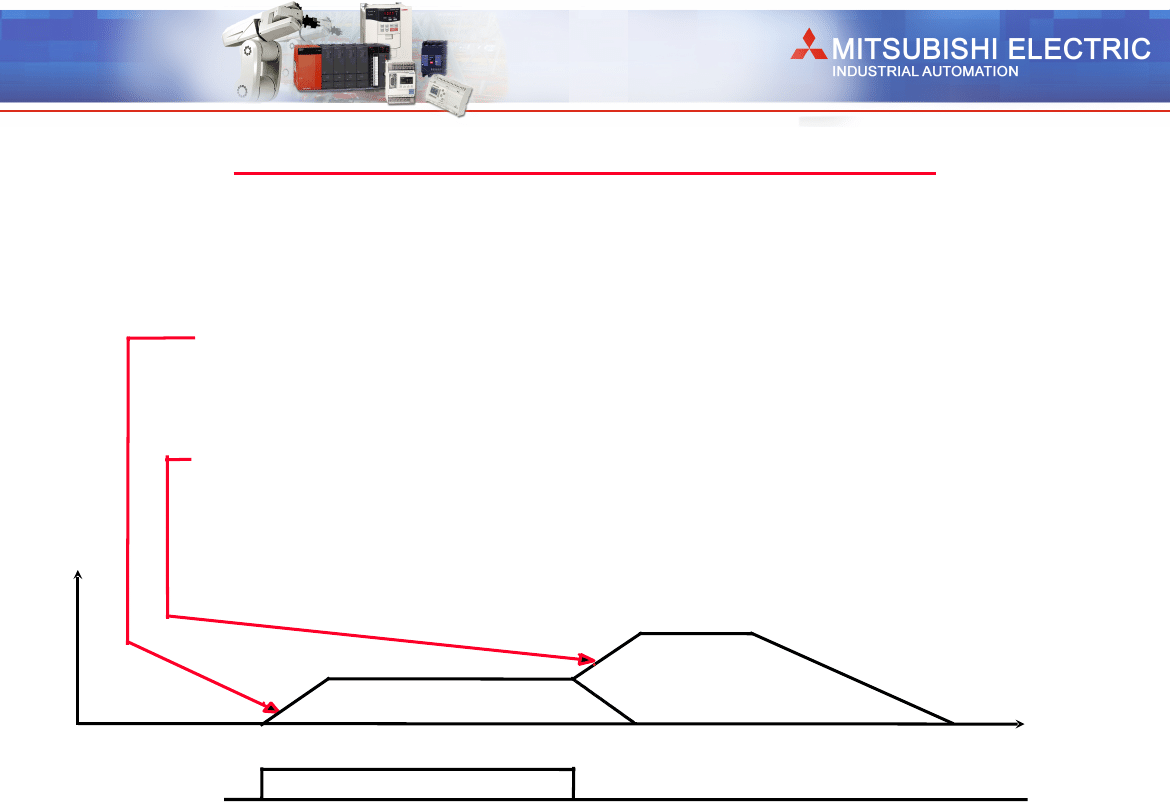
Polecenia „MOV“ i „MOVI”
SPN(1000)Prędkość
1000 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TIM(10)
Czas postoju
100 [ms]
MOVI(1000)
Przemieszczenie
1000 [x10
STM
m]
STOP
Koniec programu
v
t
Serwonapędy
11
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
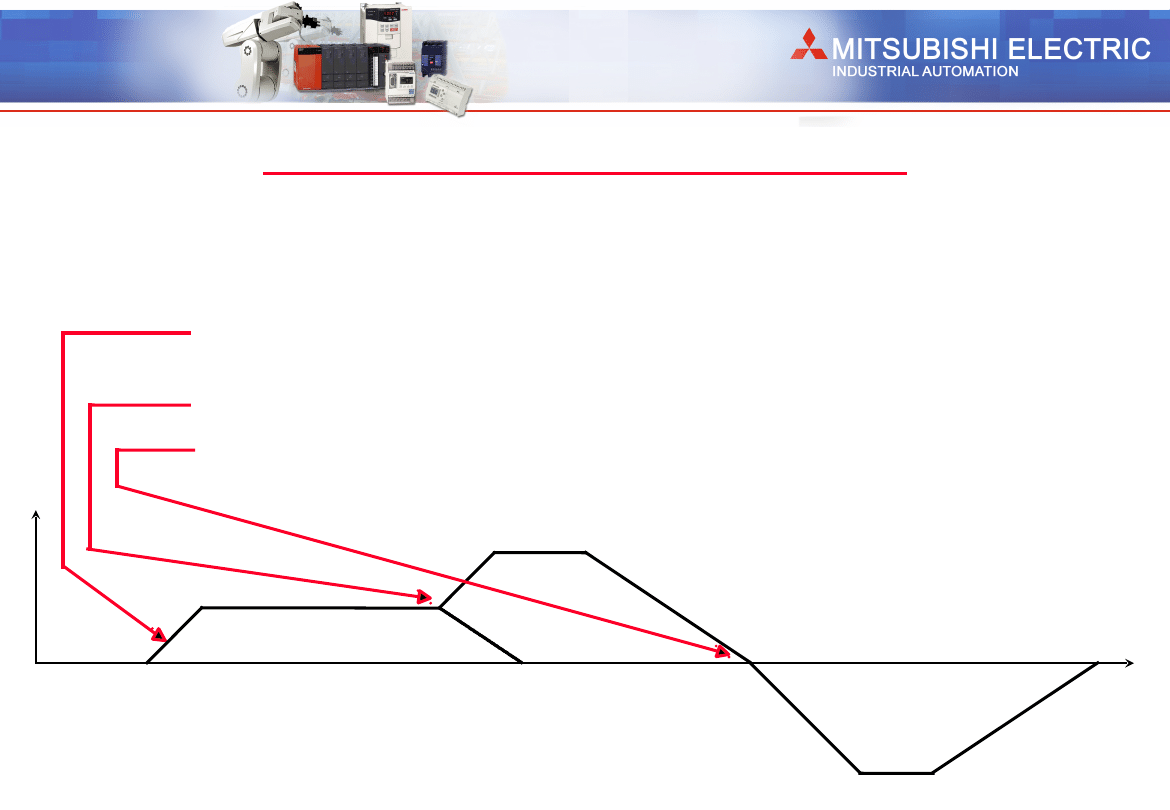
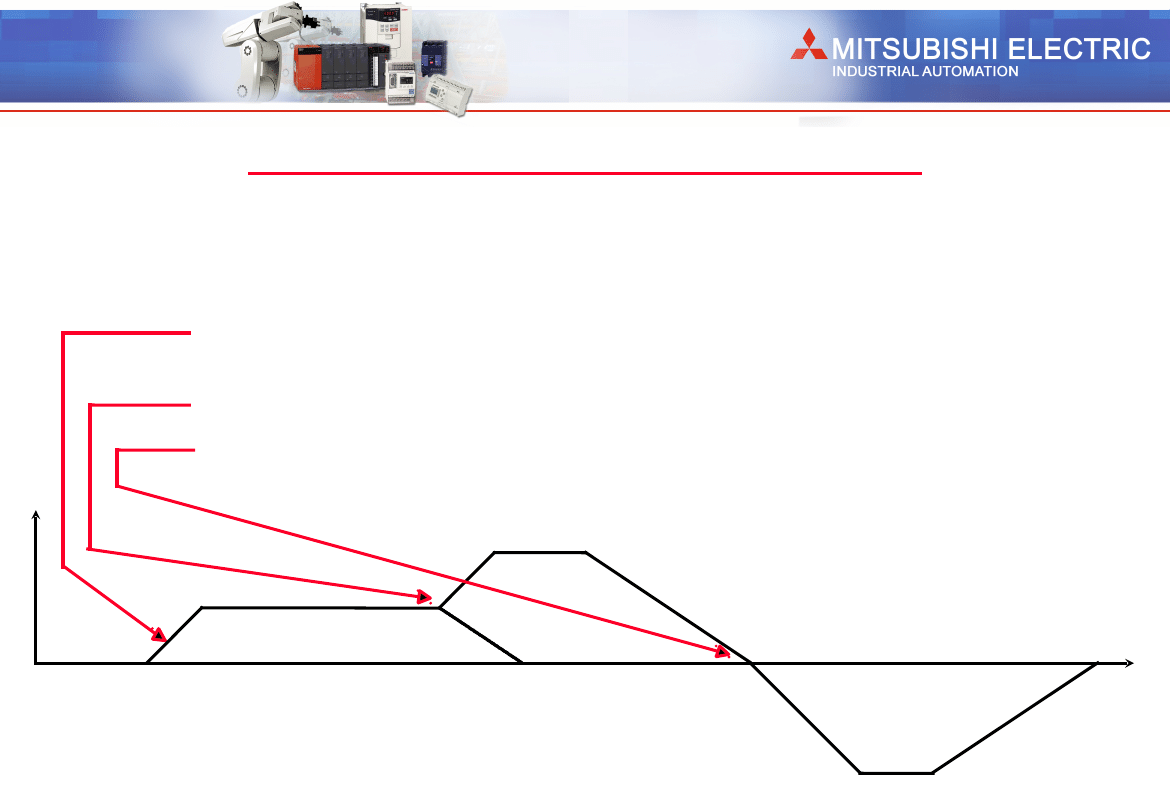
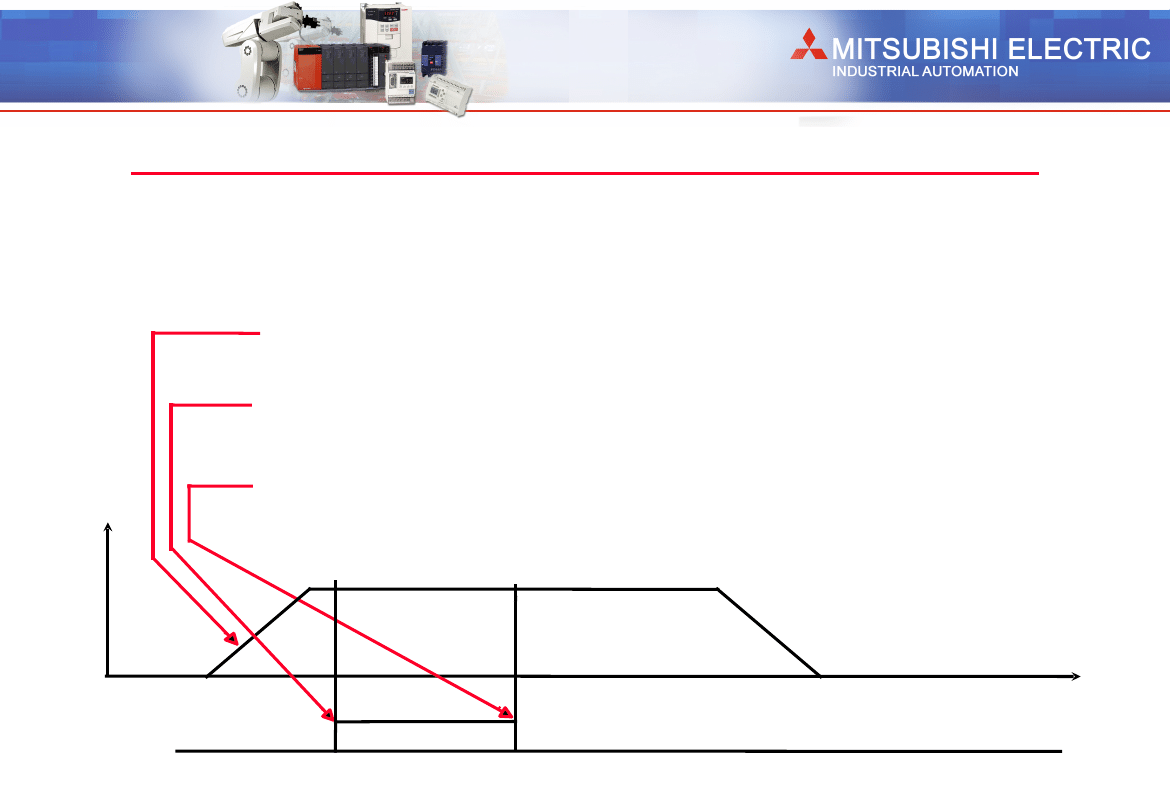
Polecenia „MOV” I „MOVA“
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOV(500) Przemieszczenie
500 [x10
STM
m]
SPN(1000)Prędkość
1000 [obr/min]
MOVA(1000)
Przemieszczenie kont.
1000 [x10
STM
m]
MOVA(1500)Przemieszczenie kont. 1500 [x10
STM
m]
STOP
Koniec programu
v
t
Serwonapędy
12
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
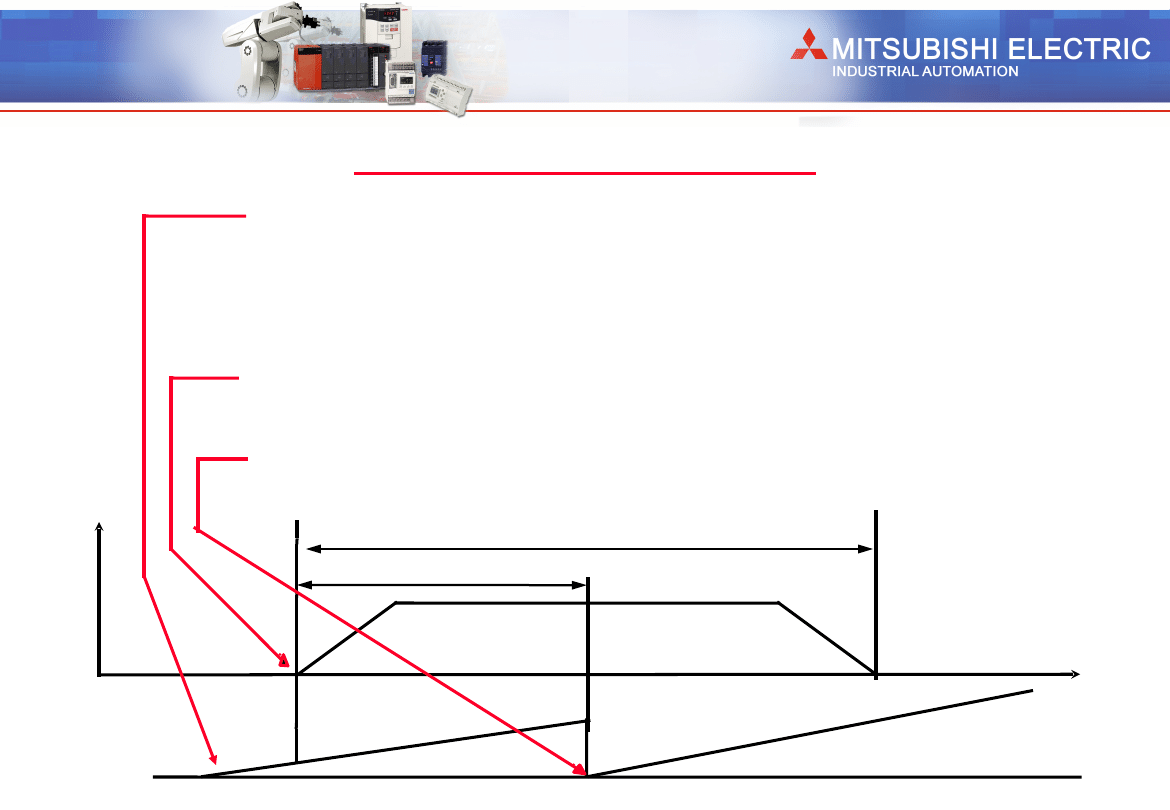
Polecenia „MOVI“ i „MOVIA”
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOVI(500)Przemieszczenie inkr.
500 [x10
STM
m]
SPN(1000)Prędkość
1000 [obr/min]
MOVIA(500)
Przemieszczenie kont.
1000 [x10
STM
m]
MOVIA(500)Przemieszczenie kont.
1500 [x10
STM
m]
STOP
Koniec programu
v
t
Serwonapędy
13
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Polecenie „OUTON / OUTOFF“
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOV(500) Przemieszczenie
500 [x10
STM
m]
OUTON(1) Wyjście 1 ON
SPN(1000)Prędkość
1000 [obr/min]
MOVA(1000)
Przemieszczenie
1000 [x10
STM
m]
OUTOF(1) Wyjście 1 OFF
STOP
Koniec programu
Wyjście 1
v
t
Serwonapędy
14
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
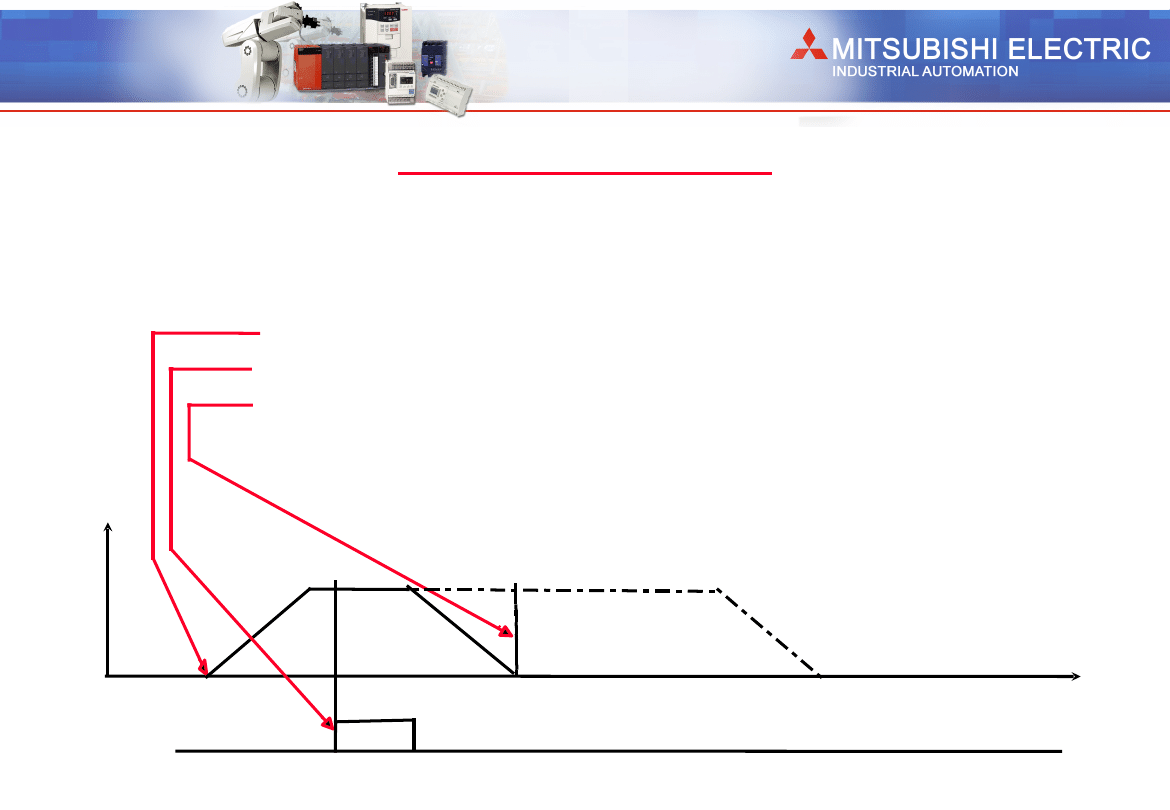
Polecenia „TRIP“ i „TRIPI” (nast. slajd)
Wyjście 1
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TRIP(300) Punkt dojścia abs.
300 [x10
STM
m]
OUTON(1) Wyjście 1 ON
TRIP(500) Punkt dojścia abs.
500 [x10
STM
m]
OUTOF(1) Wyjście 1 OFF
STOP
Koniec programu
300
500
v
t
Serwonapędy
15
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Polecenie „COUNT“
COUNT(500)
Wartość licznika
500 [imp.]
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOVI(500) Przemieszczenie
1000 [x10
STM
m]
TRIPI(250) Punkt dojścia inkr. 200 [x10
STM
m]
COUNT(0) Zerowanie licznika 0 [imp.]
STOP
Koniec programu
Counter
500
250
v
t
500
Serwonapędy
16
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Polecenie „ITP“
Wejście PI1
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [ms]
STB(300) Czas hamowania
300 [ms]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
SYNC(1)
Sygnał wyzw. przerwanie
ITP(200)
Przerwanie po 200
200 [x10
STM
m]
STOP
Koniec programu
300
500
v
t
Serwonapędy
17
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
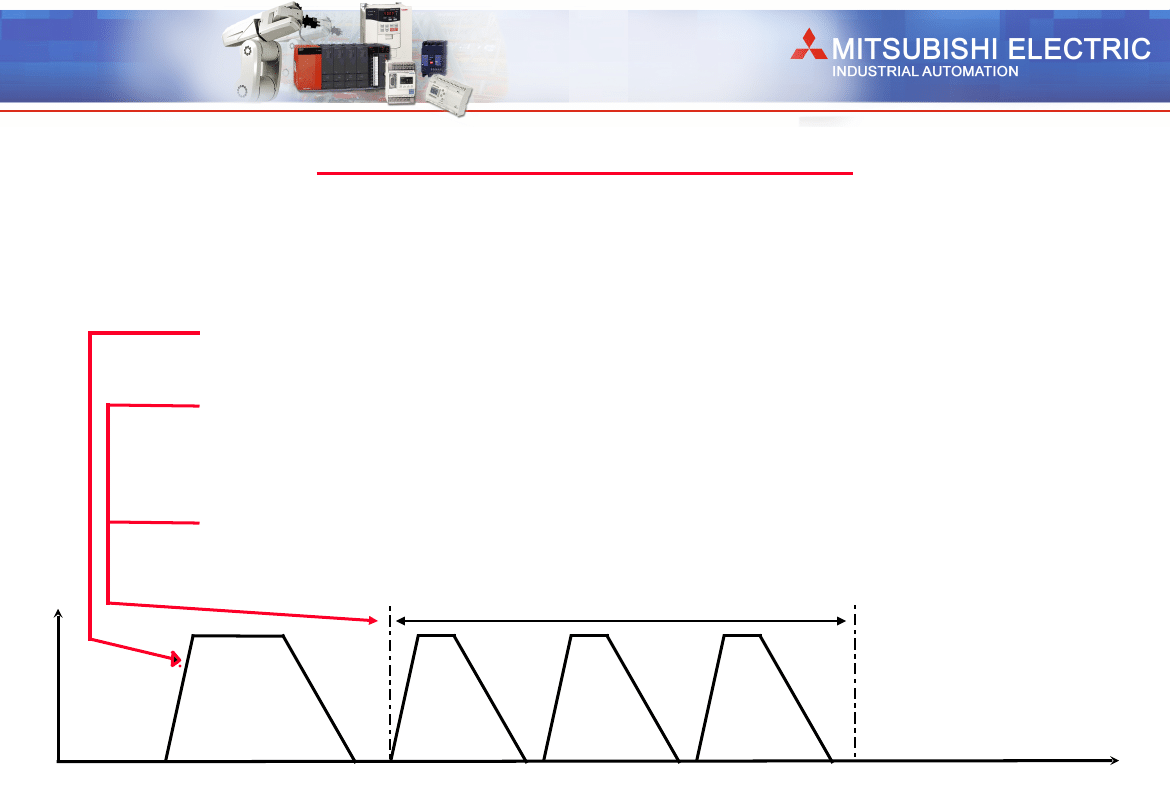
Polecenie „FOR-NEXT”
SPN(1000)Prędkość
1000 [obr/min]
STA(20)
Czas rozpędzania
200 [ms]
STB(30)
Czas hamowania
300 [ms]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TIM(5)
Czas postoju
50 [ms]
FOR(3)
Pętla
3 razy
MOVI(600)Przemieszczenie inkr.
600 [x10
STM
m]
TIM(10)
Czas postoju
100 [ms]
NEXT
Koniec pętli
STOP
Koniec programu
v
t
Serwonapędy
18
MR-J2
MR-J2
S
S
MR-J2S-
MR-J2S-
CL
CL
Adresowanie pośrednie
Instrukcje mogą być używane z adresem pośrednim.
Dostępne rejestry: R1 - R4, D1 - D4.
Rejestry R1 – R4 mogą być przechowywane w EEPROM
(zapis do 100 000 razy).
Przy zatrzymanym silniku, wartości tych rejestrów mogą
być modyfikowane przez port szeregowy.
Przykład:
SPN(D1)
D1=1000
STC(D2)
D2=200
MOV(R1)
R1=1000
TIM(10)
MOV(R2)
R2=2000
STOP
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
MR J2S A Podrecznik obslugi
MR J2S A Podrecznik obslugi
MR J2S A Podrecznik obslugi
MR prezentacja
Sztuka Prezentacji MR
MR prezentacja
Sztuka Prezentacji MR ver 2
prezentacja finanse ludnosci
prezentacja mikro Kubska 2
Religia Mezopotamii prezentacja
Prezentacja konsument ostateczna
Strategie marketingowe prezentacje wykład
motumbo www prezentacje org
lab5 prezentacja
Prezentacja 18
więcej podobnych podstron