
MEL SERVO
Ser wo na pêdy AC z silnikami
synchronicznymi
Seria MR-J2S-A
Podrêcznik obs³ugi
IN DU STRI AL AU TO MA TI ON
MITSUBISHI ELECTRIC
MITSUBISHI E LECTRIC
Art.-Nr.: 139665PL
04 07 2003
Wersja C

Wykaz wersji, modyfikacji i zmian
Serwonapędy MR-J2S-A
Podręcznik obsługi
Wersja
Zmiany
A
08/2001
pdp
—
B
09/2001
pdp
CPL 08/2003
TS
Pierwsza wersja polskojęzyczna


O niniejszym podręczniku
Niniejszy podręcznik zawiera szczegółowe informacje na temat sposobu montażu i podłączania oraz obsługi i
użytkowania serwonapędów Mitsubishi Electric MELSERVO serii MR-J2Super-A.
W przypadku pojawienia się pytań lub niejasności związanych z instalacją lub użytkowaniem wyrobów
opisanych w niniejszym podręczniku, prosimy zwracać się do MPL Technology Sp. z o.o. - dystrybutora Mit-
subishi Electric w Polsce, a poza granicami Polski - do Mitsubishi Electric Europe B.V. lub odpowiedniego
dystrybutora.
Aktualne informacje można znaleźć także na stronach internetowych:
www.mpl.pl (MPL Technology Sp. z o.o.)
www.mitsubishi-automation.com (Mitsubishi Electric Europe B.V.)
MITSUBISHI ELECTRIC Corporation zastrzega sobie prawo do wprowadzania zmian w wyrobach i ich doku-
mentacji bez odrębnego powiadomienia.
© 07/2003
© dla wydania polskiego MPL Technology Sp. z o.o. 08/2003

Serwonapędy MELSERVO MR-J2Super-A
V
Zasady bezpieczeństwa
Ogólne informacje dotyczące bezpieczeństwa
Przeznaczenie podręcznika
Niniejszy podręcznik przeznaczony jest do użytku wykwalifikowanego i kompetentnego per-
sonelu, zaznajomionego z wymogami bezpieczeństwa dla napędów elektrycznych i urządzeń
automatyki przemysłowej.
Prace związane z projektowaniem, instalacją, wdrożeniem, próbami i obsługą opisanych w
podręczniku urządzeń mogą być wykonywane wyłącznie przez osoby wykwalifikowane i kom-
petentne, zaznajomione z wymogami bezpieczeństwa dla napędów elektrycznych i urządzeń
automatyki przemysłowej.
Szczegółowe wskazówki bezpieczeństwa, zamieszczone w niniejszym podręczniku
Informacje, związane z bezpieczeństwem obsługi oznakowane są w podręczniku w poniżej
podany sposób, w zależności od stopnia i rodzaju niebezpieczeństwa, którego dotyczą:
oznacza, że naruszenie podanego wymagania lub niezgodna z nim obsługa może spowodować
nieprawidłową pracę serwowzmacniacza lub serwosilnika.
!!!
ZAGROŻENIE:
oznacza, że naruszenie opisanego wymagania lub zalecenia stwarza zagrożenie dla
życia lub zdrowia personelu, a także ryzyko uszkodzenia lub zniszczenia sprzętu.
!
OSTRZEŻENIE:
oznacza, że naruszenie opisanego wymagania lub zalecenia stwarza ryzyko uszkodze-
nia lub zniszczenia sprzętu.
UWAGA:
VI
Zgodność z dyrektywami UE
Dyrektywy Unii Europejskiej zostały wydane w celu standaryzacji prawodawstwa krajów,
należących do Unii i zapewnienia swobodnej dystrybucji wyrobów przy zagwarantowaniu ich
bezpieczeństwa. Dyrektywy: dyrektywa maszynowa (Machinery Directive, obowiązująca od
stycznia 1995), dyrektywa kompatybilności elektromagnetycznej (EMC Directive,
obowiązująca od stycznia 1996) oraz dyrektywa niskonapięciowa (LV Directive, obowiązująca
od stycznia 1997) wymagają od producenta zapewnienia określonych w nich podstawowych
wymogów bezpieczeństwa oraz oznakowania wyrobów znakami CE.
Zgodność wyrobu z wymogami dyrektyw UE potwierdzana jest przez wydanie odpowiedniej
deklaracji zgodności oraz przez naniesienie symbolu CE na wyrobie, jego opakowaniu oraz w
towarzyszącej mu dokumentacji.
Wymogi zgodności z wszystkimi dyrektywami europejskimi odnoszą się do maszyn i
urządzeń, w których zastosowano serwonapędy.
Serwowzmacniacz ani serwosilnik nie są kompletnymi funkcjonalnie urządzeniami, lecz tzw.
złożonymi komponentami, zaprojektowanymi do instalacji i użytkowania wyłącznie w połącze-
niu z innymi urządzeniami celem sterowania i współpracy z nimi. Stąd dyrektywa EMC oraz
dyrektywa maszynowa nie mają wprost zastosowania do serwonapędów ani ich poszczegól-
nych elementów. Pogląd ten jest zgodny z opinią Europejskiego Komitetu Producentów
Maszyn Elektrycznych i Energoelektroniki (CEMEP).
1. Dyrektywa niskonapięciowa
Dyrektywa niskonapięciowa odnosi się wprost do serwonapędów i ich elementów składowych.
Opisane w niniejszym podręczniku wyroby są zaprojektowane i produkowane zgodnie z
dyrektywą niskonapieciową, i oznakowane symbolem CE.
Zgodność z dyrektywą niskonapięciową jest certyfikowana przez TÜV, niezależną organizację
certyfikującą.
2. Dyrektywa kompatybilności elektromagnetycznej (EMC)
Dyrektywa kompatybilności elektromagnetycznej odnosi się do maszyn i urządzeń, zawier-
ających serwonapędy, a nie do serwonapędów i ich elementów składowych jako takich. W
celu zapewnienia zgodności maszyny lub urządzenia z dyrektywą, należy zastosować filtry
przeciwzakłóceniowe. Szczegółowe sposoby i wymogi zapewnienia zgodności przedstawione
są w wydanych przez Mitsubishi Electric zaleceniach producenta (EMC Installation Guide-
lines, dokument nr IB(NA)67310 kod: 103944.
3. Dyrektywa maszynowa.
Nie będąc kompletnymi maszynami, serwonapędy nie podlegają dyrektywie maszynowej.
Serwonapędy MELSERVO MR-J2Super-A
VII
Szczegółowe wymogi bezpieczeństwa
1. Zabezpieczenie przed porażeniem elektrycznym
2. Zabezpieczenie przed pożarem
3. Zabezpieczenie przed uszkodzeniem sprzętu i obrażeniami
!
OSTRZEŻENIE:·
●
Przed rozpoczęciem podłączania lub przeglądu należy wyłączyć zasilanie, odcze-
kać co najmniej 10 minut, a następnie przy pomocy testera upewnić się o braku
niebezpiecznego napięcia.
●
Serwowzmacniacz i serwosilnik muszą być uziemione.
●
Instalację i przeglądy sprzętu może wykonywać jedynie osoba uprawniona i kom-
petentna.
●
Wszelkie operacje klawiszami należy wykonywać suchymi rękami.
●
Przewody nie powinny być zadrapane, ściśnięte, poddane nadmiernym
naprężeniom czy znacznym obciążeniom.
●
Naruszenie któregokolwiek z powyższych wymagań grozi porażeniem elektrycz-
nym.
!
OSTRZEŻENIE:
●
Niedopuszczalny jest montaż serwowzmacniacza, serwosilnika lub rezystora ha-
mującego na lub w pobliżu powierzchni łatwopalnej.
●
Jeśli serwowzmacniacz ulegnie uszkodzeniu, należy niezwłocznie wyłączyć jego
zasilanie. Uszkodzenie może wywołać ciągły przepływ dużego prądu i w konsek-
wencji spowodować pożar.
●
Jeżeli używany jest rezystor hamujący, należy zapewnić wyłączanie zasilania
głównego przez sygnał alarmu. W przeciwnym wypadku uszkodzenie tranzystora
hamującego lub t.p. może doprowadzić do przegrzania rezystora hamującego i
pożaru.
!
OSTRZEŻENIE:
●
Aby zapobiec uszkodzeniom urządzenia należy na wszystkich zaciskach
przykładać wyłącznie sygnały i napięcia określone w podręczniku obsługi.
●
Należy zawsze upewnić się, czy poszczególne przewody są podłączone do
odpowiednich zacisków.
●
Należy zawsze upewnić się że polaryzacja przykładanego napięcia jest właściwa.
●
Podczas pracy oraz przez pewien czas po wyłączeniu zasilania nie należy do-
tykać, ani zbliżać żadnych przedmiotów (np. kabli) do radiatora serwowzmacnia-
cza, rezystora hamującego, serwosilnika, ponieważ mogą one być gorące i spo-
wodować oparzenie człowieka lub uszkodzenie przedmiotów.
VIII
4. Tansport i montaż
5. Okablowanie
!
OSTRZEŻENIE:
●
Urządzenia muszą być transportowane stosownie do swojej wagi.
●
Nie wolno układać kartonów z urządzeniami w stosach wyższych niż zalecane.
●
Nie wolno przenosić serwosilnika trzymając za kable, wał lub enkoder.
●
Nie wolno nosić serwowzmacniacza trzymając za pokrywę czołową. Może to spo-
wodować jego upadek.
●
Nie wolno stawać na elementach serwonapędu ani stawiać na nich ciężkich
przedmiotów.
●
Zabezpiecz serwowzmacniacz i serwosilnik przed upadkiem i uderzeniami.
!
OSTRZEŻENIE:
●
Serwowzmacniacz należy montować w miejscu, które utrzyma jego ciężar i w
sposób zgodny z zaleceniami podręcznika obsługi.
●
Serwowzmacniacz i serwosilnik muszą być montowane we właściwej pozycji.
●
Pozostaw podane odstępy pomiędzy serwowzmacniaczem i ściankami szafy ste-
rującej lub innym sprzętem.
●
Nie instaluj i nie używaj uszkodzonego lub niekompletnego serwonapędu.
●
Należy uważać, aby do wnętrza serwowzmacniacza nie dostały się wkręty inne
przewodzące przedmioty, olej lub inne substancje palne.
●
Serwosilnik wymaga solidnego zamocowania w maszynie. Nieodpowiednio zamo-
cowany serwosilnik może ulec wyrwaniu podczas pracy.
●
Serwosilnik z przekładnią wymaga zamontowania w odpowiedniej pozycji, by
zapobiec wyciekom oleju
●
Dla bezpieczeństwa personelu, ruchome i wirujące elementy muszą być osłonięte
●
Nie wolno uderzać w silnik ani jego wał, np. podczas montażu w maszynie. Może
to doprowadzić do uszkodzenia enkodera.
●
Obciążenie wału silnika nie może przekraczać wartości dopuszczalnej, pod
groźbą pęknięcia.
●
W przypadku długotrwałego przechowywania sprzętu, skonsultuj się z przed-
stawicielem Mitsubishi.
!
OSTRZEŻENIE:
●
Okablowanie musi być wykonane poprawnie i niezawodnie. W przeciwnym wy-
padku serwosilnik może pracować niepoprawnie.
●
Pomiędzy serwowzmacniaczem i serwosilnikiem nie wolno podłączać kondensa-
tora, filtra szumów czy tłumika przepięć.
●
Zwróć uwagę na prawidłowość podłączenia faz (U, V, W) serwosilnika. W przeci-
wnym wypadku silnik będzie pracował nieprawidłowo.
●
Nie podłączaj serwosilnika bezpośrednio do sieci. Może to spowodować jego usz-
kodzenie.
●
Dioda bocznikująca obciążenie przekaźnika DC musi być podłączona z zachow-
aniem biegunowości. W przeciwnym wypadku sterowany obwód nie będzie
działać, a serwowzmacniacz może ulec uszkodzeniu.
Serwonapędy MELSERVO MR-J2Super-A
IX
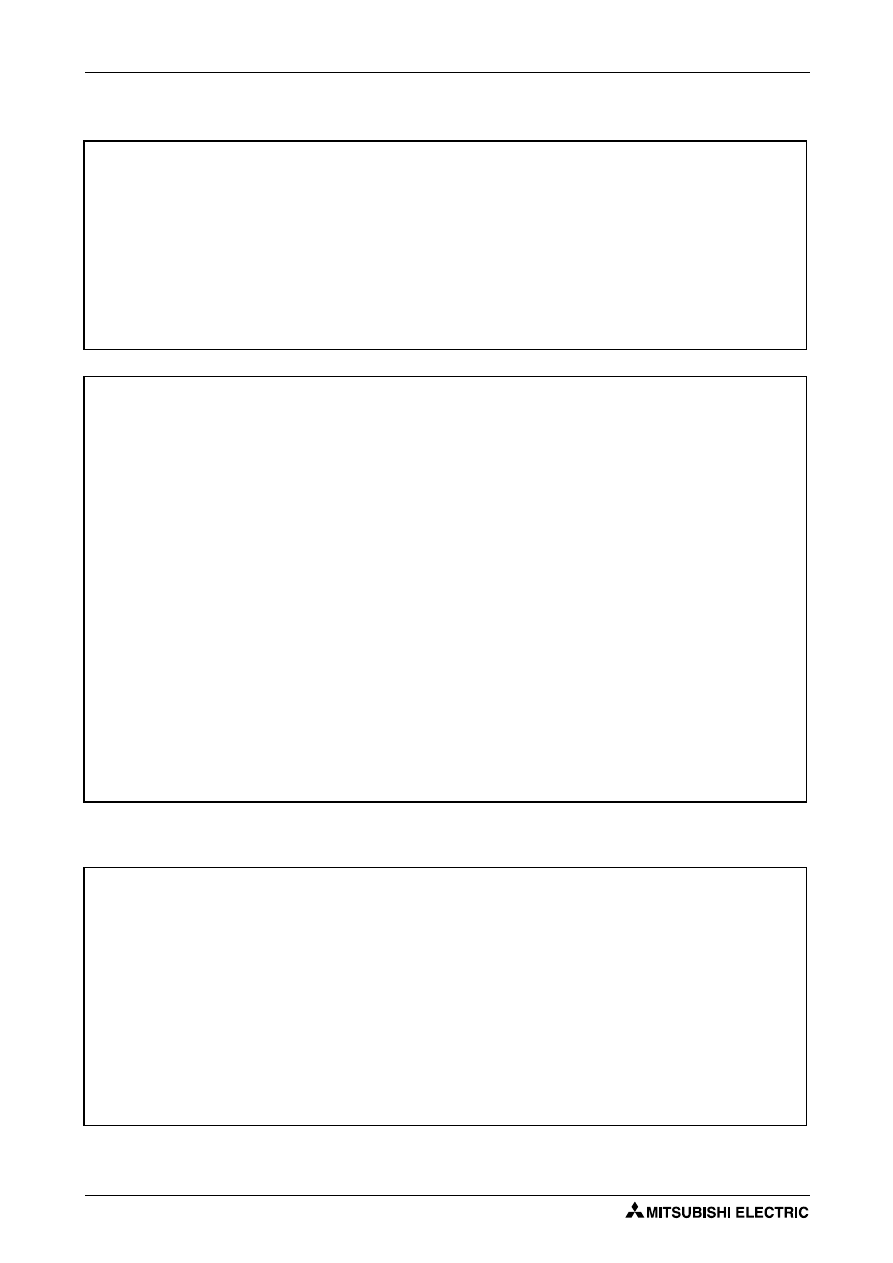
Struktura serwonapędu
Warunki środowiskowe
Serwowzmacniacz powinien być użytkowany w środowisku o stopniu zanieczyszczenia nie
wyższym niż 2, zgodnie z normą IEC 664. Zapewnienie takiego stopnia czystości wymaga
zastosowania szafy sterowniczej o stopniu ochrony IP54 (ochrona przed wilgocią, mgłą ole-
jową, pyłem itp.).
S000500C
NFB
MC
M
Transformator
Wyłącznik
Stycznik
Zasilacz
24 V DC
(opcja)
Serwowzmac-
niacz
Serwo-
silnik
X
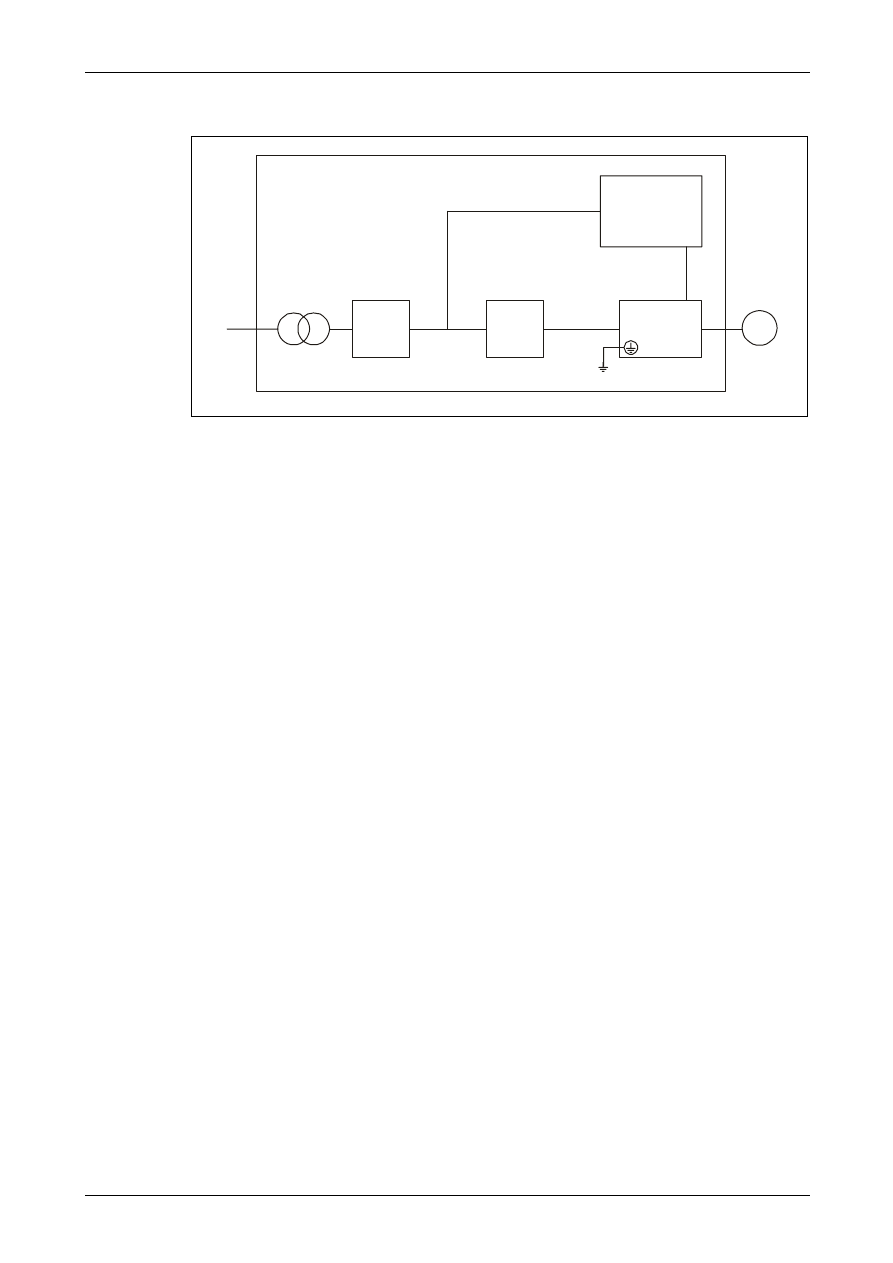
Uziemienie ochronne
Aby zapobiec porażeniu prądem elektrycznym, należy bezwzględnie łączyć zacisk uziemienia
ochronnego (PE) serwowzmacniacza z listwą uziemiającą szafy sterowniczej.
Nie należy podłączać dwu lub więcej przewodów do tego samego zacisku uziemiającego.
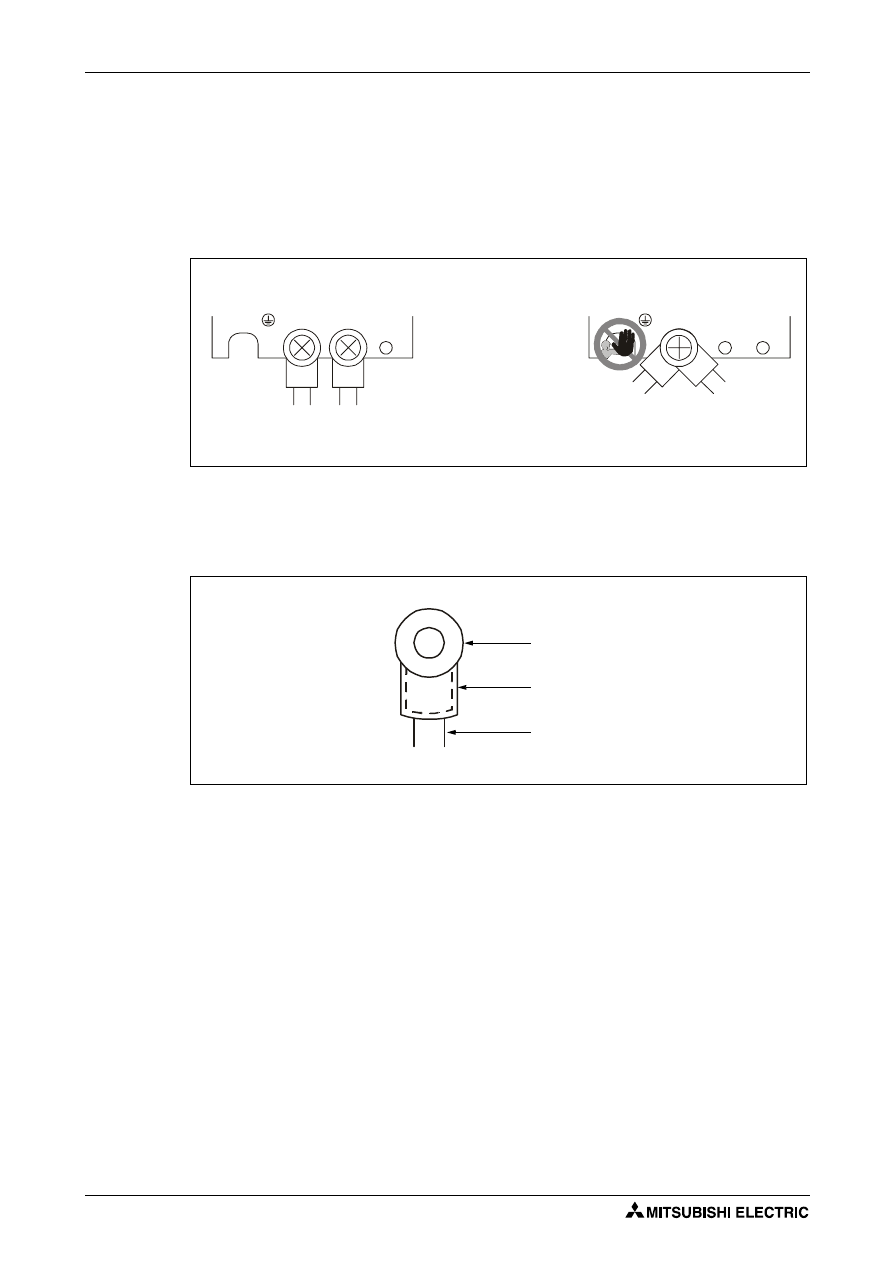
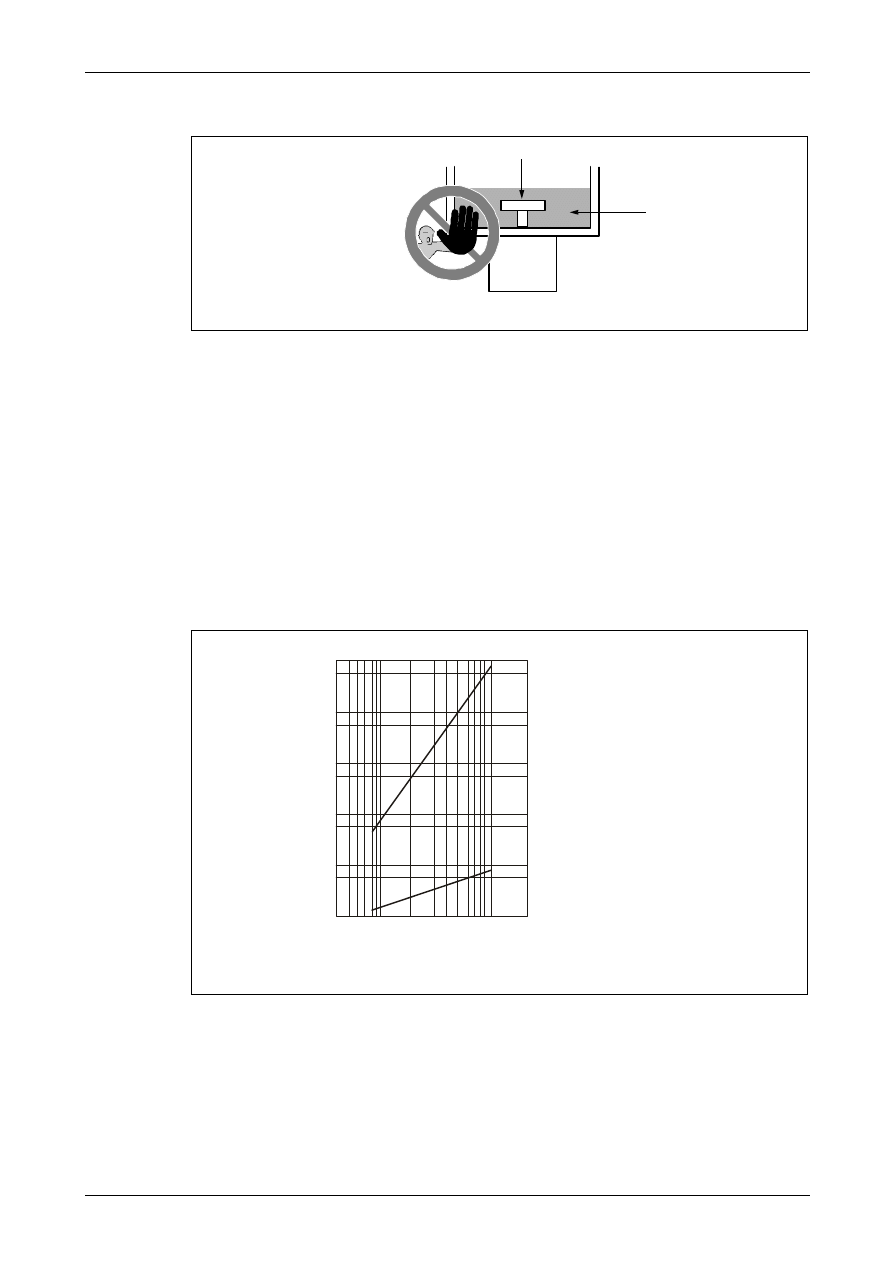
Podłączanie przewodów
Kable, podłączane do zacisków listwy zaciskowej serwowzmacniacza powinny być zakończo-
ne końcówką oczkową w koszulce izolacyjnej, aby zapobiec zwarciom między sąsiadującymi
zaciskami.
S000501C
S000502C
Zaciski uziemienia
Zaciski uziemienia
Końcówka oczkowa
Koszulka izolacyjna
Przewód

Spis treści
Serwonapędy MELSERVO MR-J2Super-A
XI
Spis treści
Funkcje użytkowe i konfiguracja
Serwowzmacniacze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Zdejmowanie i zakładanie pokrywy czołowej . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Serwowzmacniacz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Montaż serwowzmacniaczy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Montaż serwosilników . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Wyłącznik nadprądowy, bezpieczniki, stycznik, przewody połączeniowe 1
Listwy zaciskowe obwodów mocy i sterowania. . . . . . . . . . . . . . . . . . . . 2
Podłączanie obwodów sterowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Interfejsy wejściowe i wyjściowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Podłączanie serwosilnika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Podłączanie serwosilnika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Połączenia wewnętrzne i zaciski wspólne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.5

Spis treści
XII
Serwosilnik z luzownikiem elektromagnetycznym . . . . . . . . . . . . . . . . . . . . . . . 32
Typowe przykłady schematu połączeń. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Przykładowe schematy połączeń dla trybu regulacji pozycjonowania . 36
Przykładowe schematy połączeń dla trybu regulacji prędkości. . . . . . . 42
Przykładowe schematy połączeń dla trybu regulacji momentu . . . . . . . 45
Wybór trybu sterowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Elementy operacyjne serwowzmacniacza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Sposób użytkowania wyświetlacza i klawiatury. . . . . . . . . . . . . . . . . . . . 4
Sygnalizacja stanu pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Wyświetlanie danych diagnostycznych . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Komunikaty alarmowe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Optymalizacja parametrów serwowzmacniacza. . . . . . . . . . . . . . . . . . . . . . . . . 43
Dostrajanie współczynników wzmocnienia . . . . . . . . . . . . . . . . . . . . . . 43
Ręczne ustawianie współczynników wzmocnienia . . . . . . . . . . . . . . . . 50
Filtry, tłumiące rezonanse w układzie mechanicznym. . . . . . . . . . . . . . . 2
Automatyczne tłumienie wibracji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Filtr dolnoprzepustowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Przełączanie wartości współczynników wzmocnienia . . . . . . . . . . . . . . . . . . . . . 7
Przebieg przełączania współczynników wzmocnienia . . . . . . . . . . . . . 10
6
Spis treści
Serwonapędy MELSERVO MR-J2Super-A
XIII
Komunikacja RS422 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Komunikacja RS232C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Wznowienie komunikacji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Przykład komunikacji. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Przetwarzanie danych. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Stan wejść/wyjść (diagnostyka I/O). . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Zablokowanie i odblokowanie sygnałów wejściowych (DI) . . . . . . . . . . 23
Przełączanie stanu wejść (operacje próbne) . . . . . . . . . . . . . . . . . . . . 24
System pozycjonowania absolutnego
Niezbędne elementy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
8

Spis treści
XIV
Kable połączeniowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Rozkład styków w listwach zaciskowych. . . . . . . . . . . . . . . . . . . . . . . . 10
Wykrywanie usterek podczas uruchomienia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
10.2.2 Komunikaty alarmu i usuwanie ich przyczyn. . . . . . . . . . . . . . . . . . . . . . 8
10.2.3 Komunikaty ostrzeżeń i usuwanie ich przyczyn . . . . . . . . . . . . . . . . . . 15
11.1.1 Przeciążenia i zabezpieczenia przeciążeniowe . . . . . . . . . . . . . . . . . . . 1
11.2.3 Charakterystyki momentu obrotowego . . . . . . . . . . . . . . . . . . . . . . . . . 12
Zasady kompatybilności elektromagnetycznej
12.1
Spis treści
Serwonapędy MELSERVO MR-J2Super-A
XV
13.4

Spis treści
Serwonapędy MELSERVO MR-J2Super-A
XVI

Wprowadzenie
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 1
1
Funkcje użytkowe i konfiguracja
1.1 Wprowadzenie
Serwonapędy prądu przemiennego Mitsubishi Electric serii MR-J2Super są serwonapędami
ogólnego stosowania, funkcjonalnie i konstrukcyjnie opartymi na wyrobach serii MR-J2, przy is-
totnie podwyższonych parametrach i rozszerzonej funkcjonalności.
Serwonapędy mogą pracować w trybie regulacji położenia (pozycjonowania), regulacji pręd-
kości lub momentu. Ponadto możliwa jest zmiana trybu regulacji, tj. tryb pracy z przełączaniem
pomiędzy regulacją położenia/prędkości, prędkości/momentu i momentu/położenia. Daje to
możliwość zastosowania w bardzo szerokim zakresie aplikacji, wykraczającym poza typowe dla
obrabiarek i innych maszyn przemysłowych precyzyjne pozycjonowanie i płynną regulację
prędkości, a obejmującym np. napędy nawijakowe z regulowanym naprężeniem lub napędy po-
dajnikowe i przenośnikowe.
Dzięki wyposażeniu serwowzmacniaczy w szeregowy interfejs komunikacyjny w standardzie
RS232C i RS422 możliwa jest np. parametryzacja, autotuning, próbne uruchomienie oraz dia-
gnostyka i monitorowanie serwonapędu przy pomocy komputera PC lub komputera prze-
mysłowego z zainstalowanym oprogramowaniem narzędziowym.
Poprzez wykonywany w czasie rzeczywistym autotuning uzyskuje się automatyczne dostroje-
nie parametrów wzmocnienia regulatorów serwonapędu do wymagań konkretnej maszyny.
Wszystkie serwosilniki używane w napędach serii MR-J2Super są standardowo wyposażone w
enkodery absolutne o rozdzielczości 17 bitów, tj. 131.072 impulsów na obrót. Zapewnia to zna-
cznie wyższą precyzję pozycjonowania w porównaniu z analogicznymi modelami serii MR-J2.
Poprzez proste dołączenie do serwowzmacniacza baterii podtrzymującej uzyskujemy system
pozycjonowania absolutnego. Uwalnia to użytkownika od konieczności bazowania napędu po
każdorazowym wyłączeniu zasilania lub wystąpieniu alarmu.
Tryb regulacji położenia (pozycjonowanie)
Prędkość i kierunek obrotów silnika są zadawane ciągiem impulsów o częstotliwości do
500.000 impulsów/s, co wraz z enkoderami o rozdzielczości 131.072 impulsów/obrót zapewnia
niezwykle precyzyjne pozycjonowanie. Funkcja wygładzania (smoothing), dostępna w dwu try-
bach, odpowiednio dla rodzaju maszyny, pozwala uzyskać stabilny i płynny start i zatrzymanie.
Ograniczenie momentu chroni tranzystory mocy oraz układ mechaniczny przed przeciążenia-
mi, np. w przypadku nagłego hamowania lub skokowej zmiany obciążenia. Wartość ogranicze-
nia może być zadana zewnętrznym sygnałem analogowym lub wartością parametru.
Regulacja prędkości
Prędkość obrotów serwosilnika jest zadawana zewnętrznym sygnałem analogowym (0–±10 V
DC) lub zaprogramowanymi wartościami parametrów (max. 7 zaprogramowanych prędkości).
Kierunek obrotów zadawany jest zewnętrznym sygnałem dwustanowym lub znakiem analogo-
wego sygnału zadawania prędkości.
Dostępne są także: programowane stałe czasowe rozpędzania i hamowania, blokada zatrzy-
manego silnika funkcją servo-lock oraz automatyczny offset analogowego sygnału zadawania.
Regulacja momentu
Wartość generowanego przez serwosilnik momentu obrotowego jest zadawana zewnętrznym
sygnałem analogowym (0–±8 V DC) lub zaprogramowanymi wartościami parametrów. Kieru-
nek momentu zadawany jest zewnętrznym sygnałem dwustanowym lub znakiem analogowego
sygnału zadawania momentu. Aby zapobiec nadmiernym zmianom prędkości np. w wyniku zr-
zutu obciążenia, dostępna jest funkcja ograniczenia prędkości zewnętrznym sygnałem analo-
gowym lub zaprogramowaną wartością parametru.
Funkcje użytkowe i konfiguracja
Wprowadzenie
1 - 2
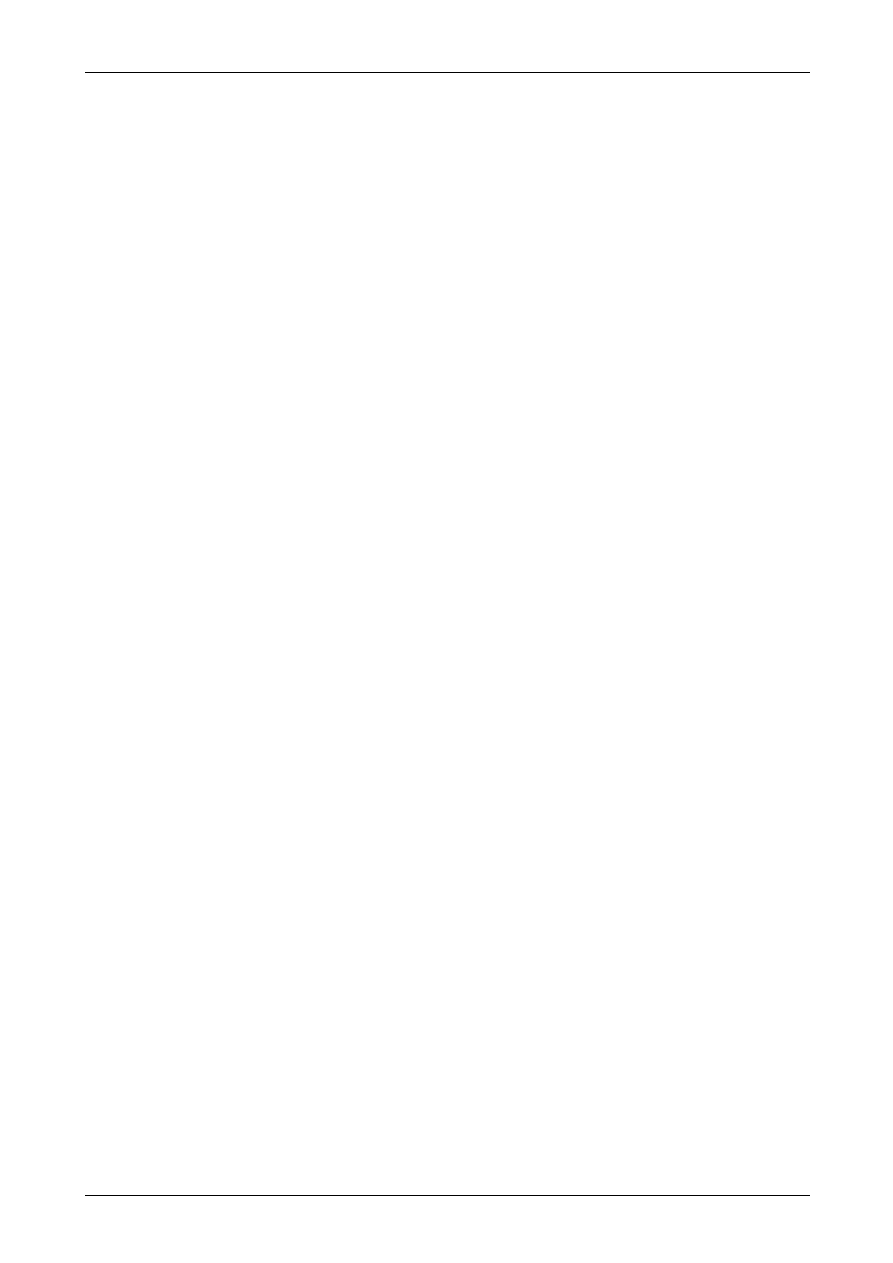
1.1.1 Schemat
blokowy
a
Zasilanie jednofazowe jest dopuszczalne dla serwowzmacniaczy o mocy do 750 W.
Szczegółowe wskazówki dotyczące zasilania znajdują się w rozdziale Rozdz. 3.5.
b
Przy podłączaniu zewnętrznego opornika hamującego należy usunąć zworę pomiędzy
zaciskami P-D.
S000858C
Rys. 1-1: Schemat blokowy serwowzmacniacza MR-J2-Super
L3
L11
L21
L2
L1
P
C D
U
U
V
V
W
W
M
+
I>
I>
I>
CN3
A/D
CN
2
RS232C
RS422
I/F
CN1A CN1B
D/A 8bit
CO
N
1
24 V DC
EMG
Serwowzmacniacz
Zewnętrzny opornik
hamujący (opcja)
b
Serwosilnik
Zasilanie:
3-fazowe, 200–230 V AC;
1-fazowe, 230 V AC
a
Obwód mocy
Luzownik
elektromag-
netyczny
Enkoder
Wentylator
MR-J2S-200A i wyżej
Zasilanie ob-
wodów ste-
rowania
Hamowanie
regeneracyjne
Wzmacni-
acz główny
Pomiar
napięcia
Zabezp.
prądo-
we
Pomiar
prądu
Wirtualna
pozycja
Rzeczywisty
reg. prądu
Wirtualny
silnik
MR-BAT
Bateria (opcja - dla
pozycjonowania
absolutnego)
2 wejścia
analog.
Cyfrowe I/O
• Servo ON
• Start
• Alarm, itd.
2 wyjścia
analogowe
Sterowanie
Inne serwo-
wzmacniacze
RS422/RS232C
Wejście
impulsów
Wirtualny
enkoder
Wirtualny reg-
ulator pozycji
Rzeczywisty
reg. prędkości
Wirtualna
prędkość
Wirtualny
moment obr.
Rzeczywisty
reg. pozycji
Wirtualny reg.
prędkości
Przegląd modeli
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 3
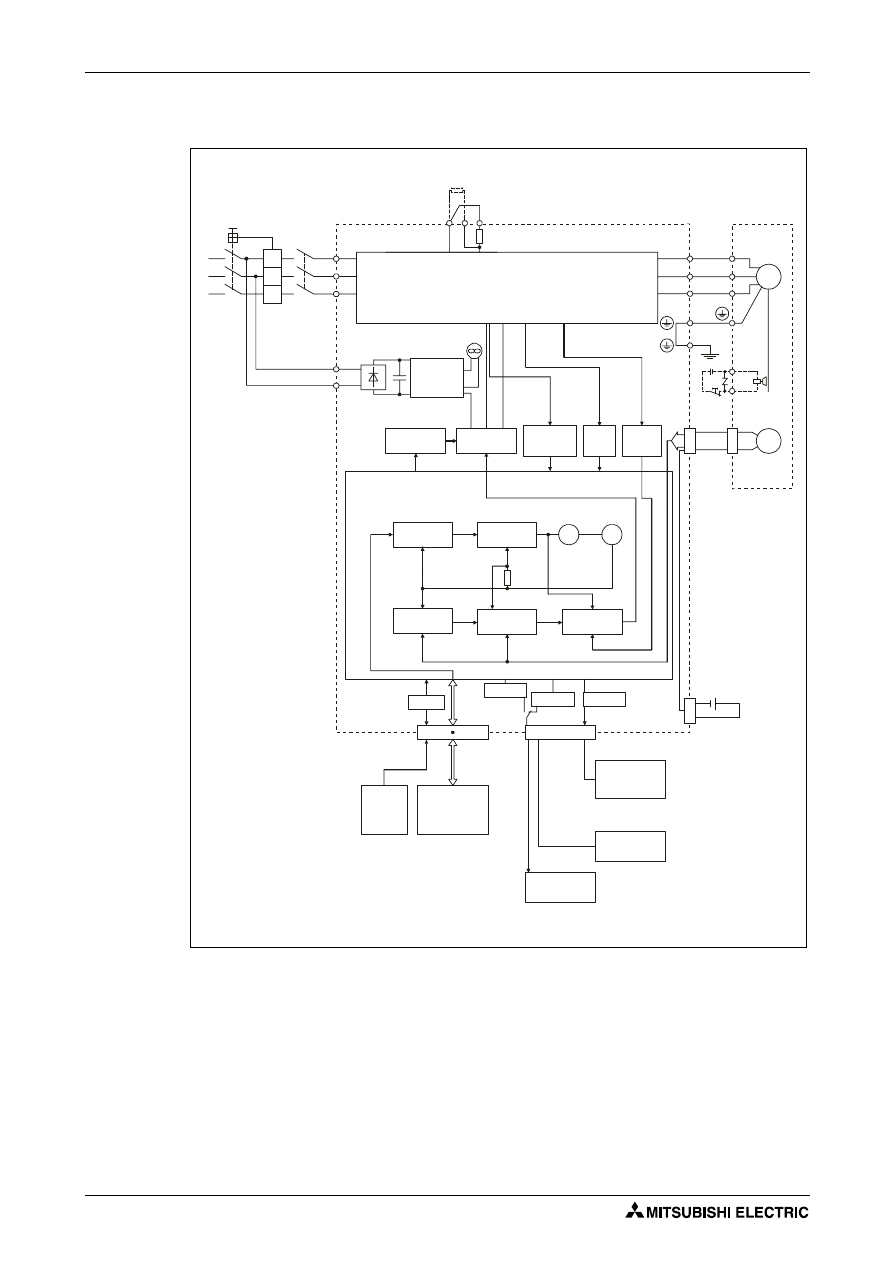
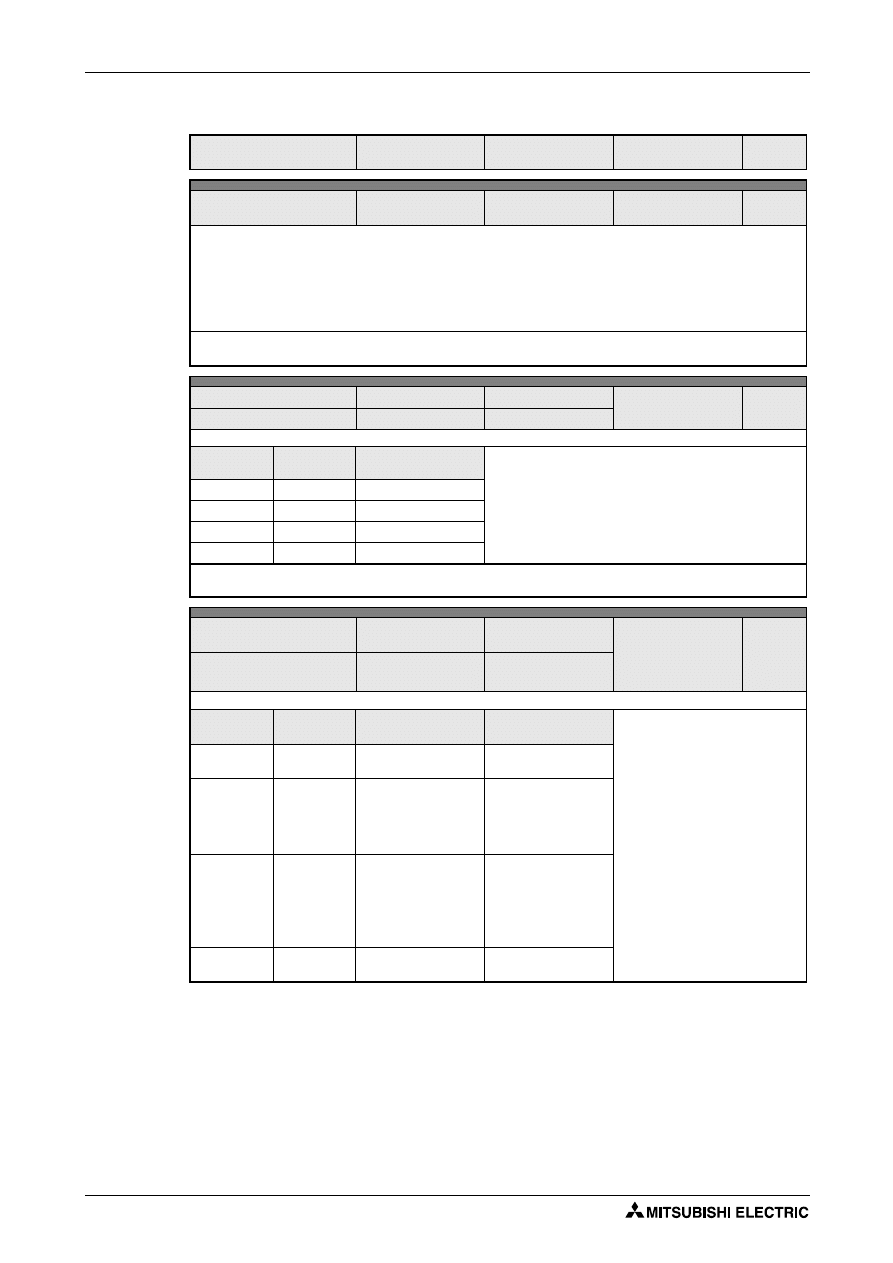
1.2 Przegląd modeli
1.2.1 Serwowzmacniacze
S001059E, S001060E, S001061E, S001062E
Rys. 1-2: Oznaczenia serwowzmacniaczy
Seria
MR-J2S- xxxA
MR-J2S-10A do 100A
MR-J2S-200 A / 350 A
Kod
Odpowiednie serwosilniki
HC-KFSxxx
HC-MFSxxx
HC-SFSxxx
HC-RFSxxx
10
053 / 13
053 / 13
—
—
20
23
23
—
—
40
43
43
—
—
60
—
—
52
—
70
73
73
—
—
100
—
—
102
—
200
—
—
152 / 202
103 / 153
350
—
—
352
203
500
—
—
502
353 / 503
700
—
—
702
—
MR-J2S-500A
MR-J2S-700A
Funkcje użytkowe i konfiguracja
Przegląd modeli
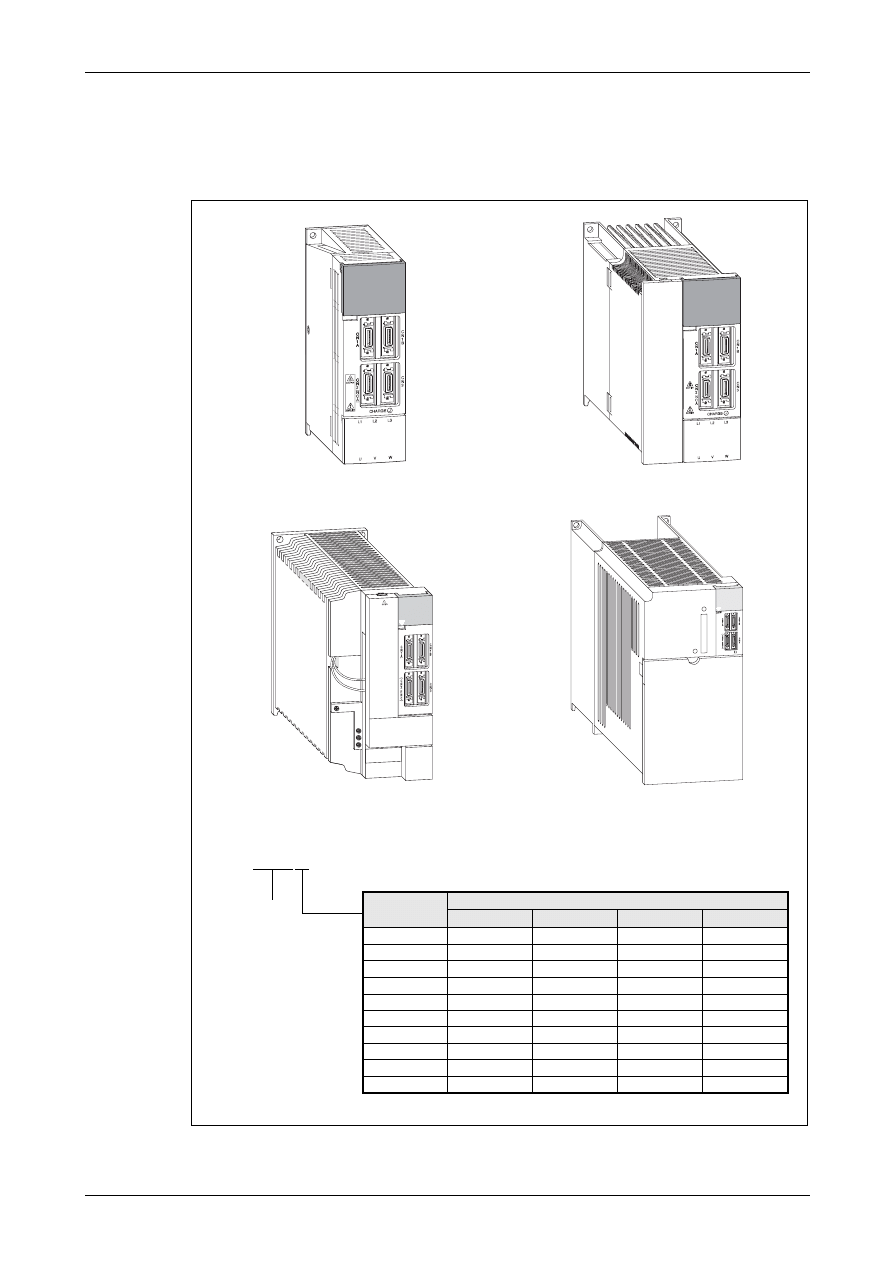
1 - 4
S000848C
Rys. 1-3: Tabliczka znamionowa
MITSUBISHI
MODEL
AC SERVO
600 W
3,2 A 3PH + 1PH 200 – 230 V 50Hz
5,5 A 1PH 230 V 50/60 Hz
170 V 0 – 300 Hz 3,6 A
TC3XXAAAAG52
3PH + 1PH 200 – 230 V 60Hz
POWER :
INPUT :
OUTPUT:
SERIAL :
MR-J2S-60A
MITSUBISHI ELECTRIC CORPORATION
MADE IN JAPAN NB
Model
Moc
Napięcie zasilania
Parametry wyjściowe
Nr seryjny
Przegląd modeli
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 5
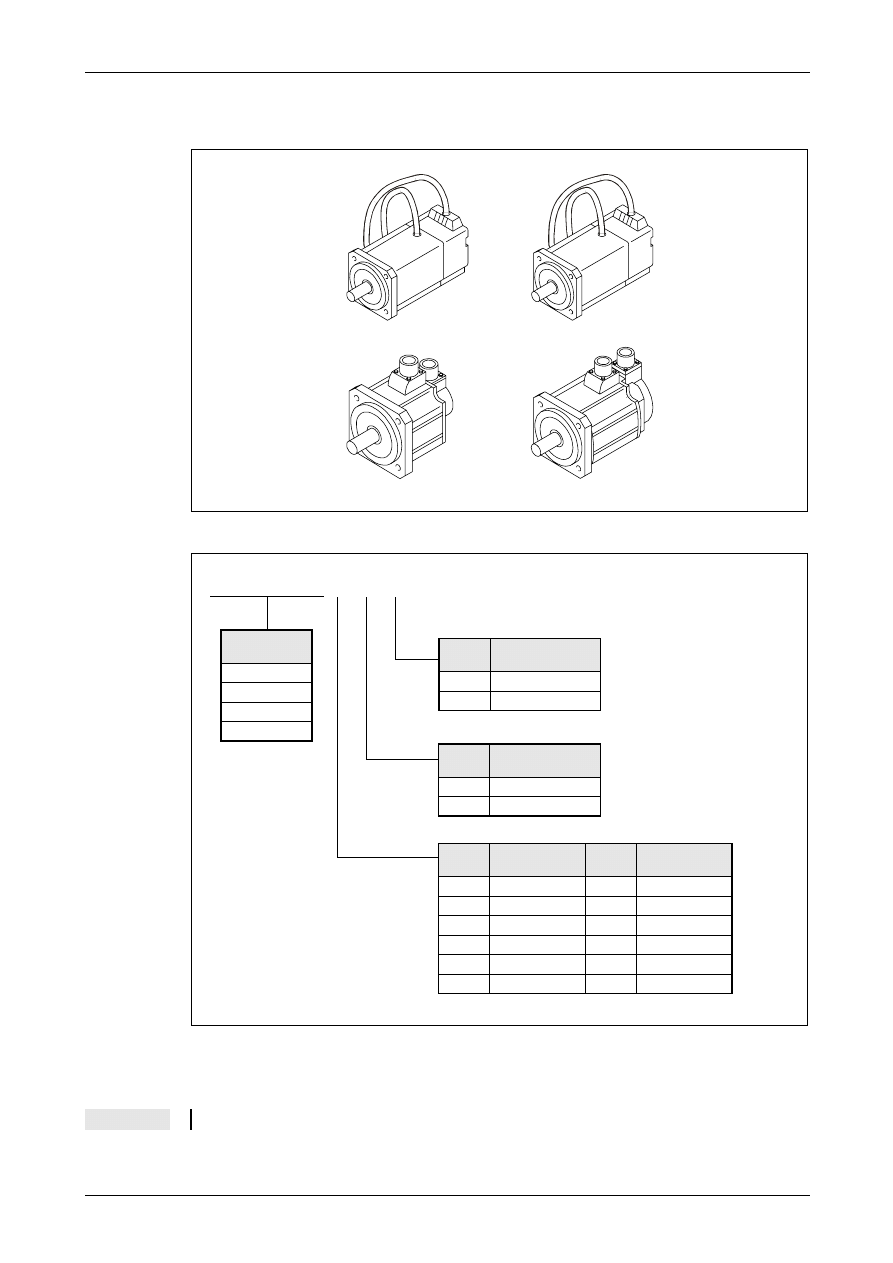
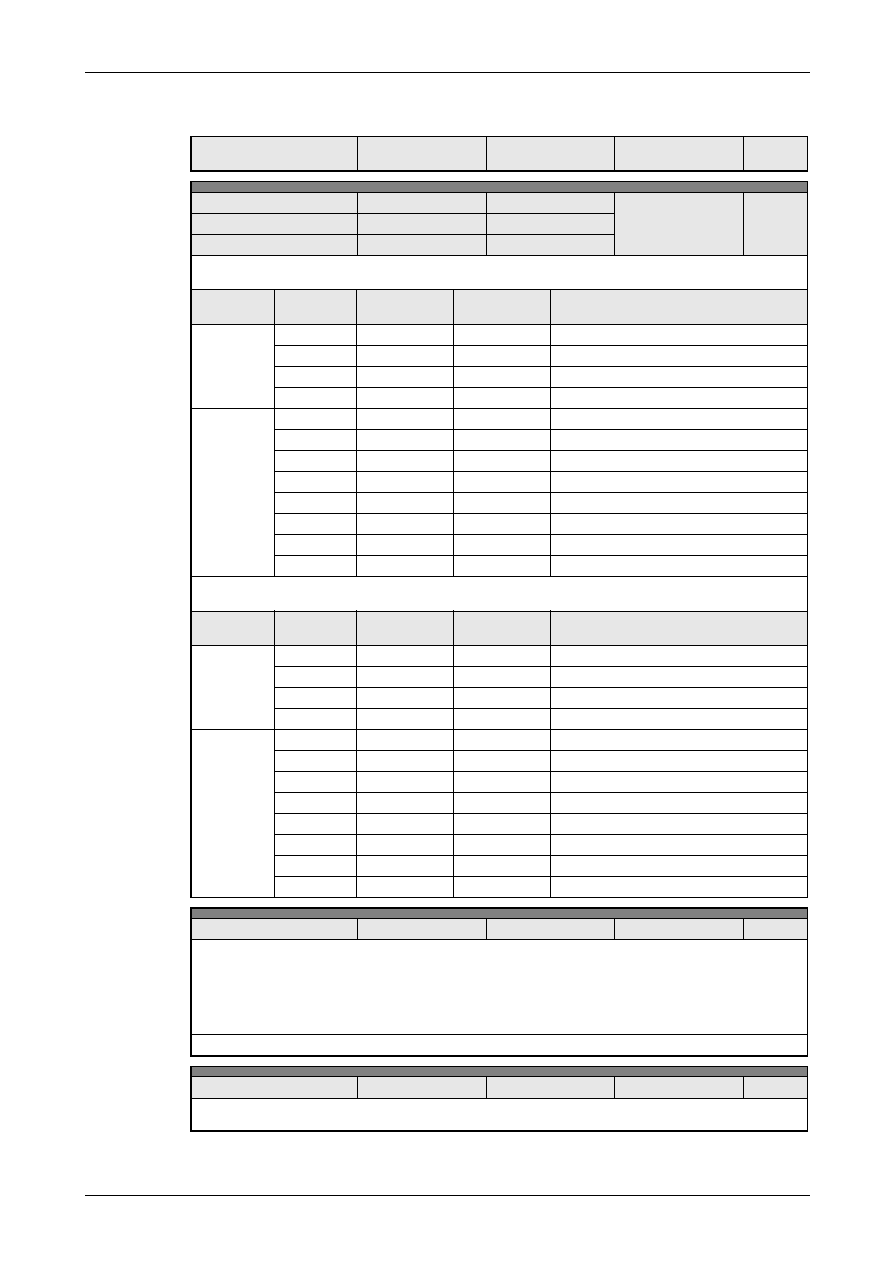
1.2.2 Serwosilniki
S000849C
Rys. 1-4: Serwosilniki
Rys. 1-5: Oznaczenia serwosilników
UWAGA
Wszystkie silniki spełniają wymogi norm EN- i UL/cUL.
Seria HC-MFS
Seria HC-SFS
Seria HC-RFS
Seria HC-KFS
Oznaczenie
serii
HC-MFS
HC-KFS
HC-SFS
HC-RFS
Kod
Moc wyjścio-
wa [W]
Kod
Moc wyjścio-
wa [W]
05
50
10
1000
1
100
15
1500
2
200
20
2000
4
400
35
3500
5
500
50
5000
7
750
70
7000
Kod
Luzownik elek-
tromagnetyczny
—
brak
B
24VDC
Kod
Obroty znamio-
nowe [obr/min]
2
2000
3
3000
HC - MFSm m m
Funkcje użytkowe i konfiguracja
Przegląd modeli
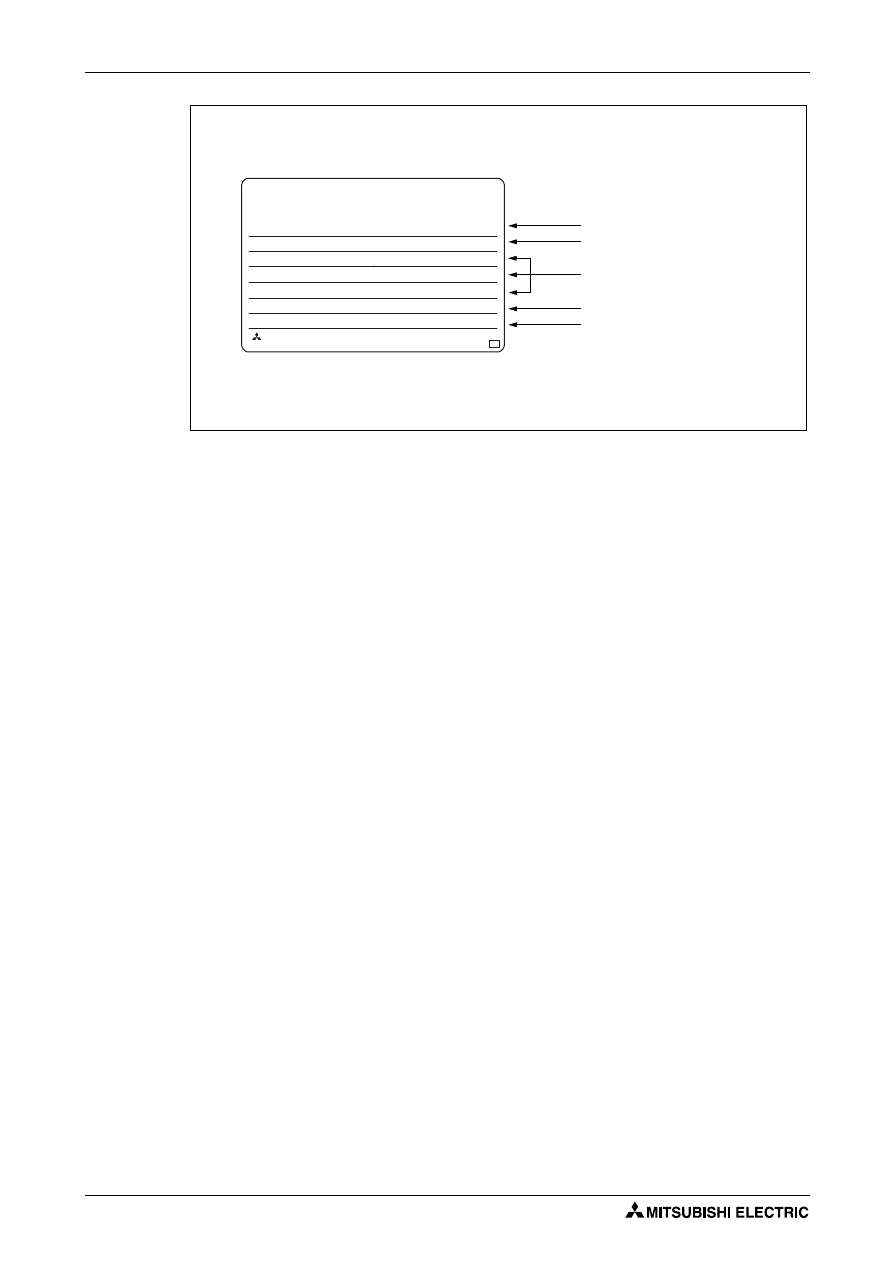
1 - 6
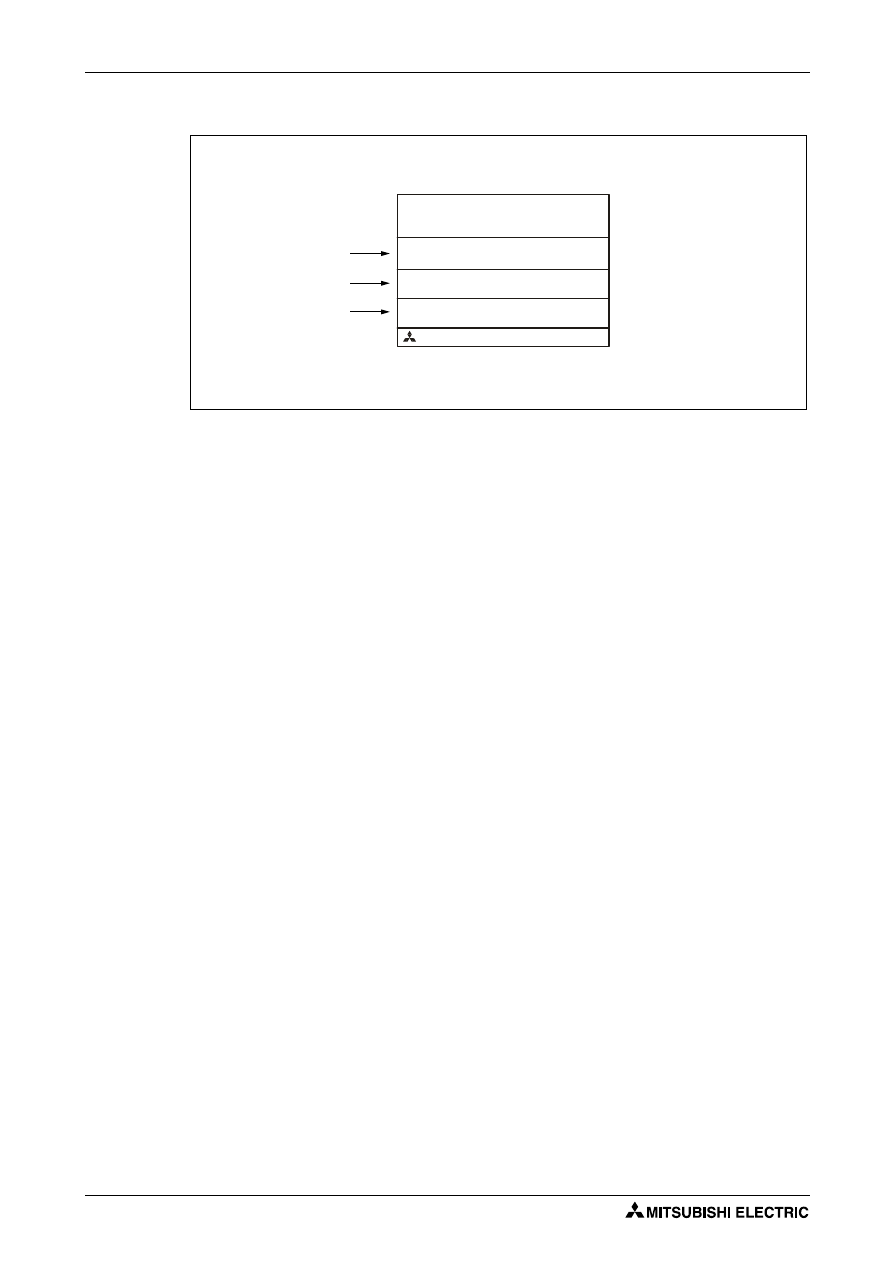
S000805C
Rys. 1-6: Tabliczka znamionowa
MITSUBISHI
AC SERVO MOTOR
SERIAL
DATE
MITSUBISHI ELECTRIC CORPORATION
HC-MFS23
Model
Numer seryjny
Data produkcji
Zdejmowanie i zakładanie pokrywy czołowej
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 7
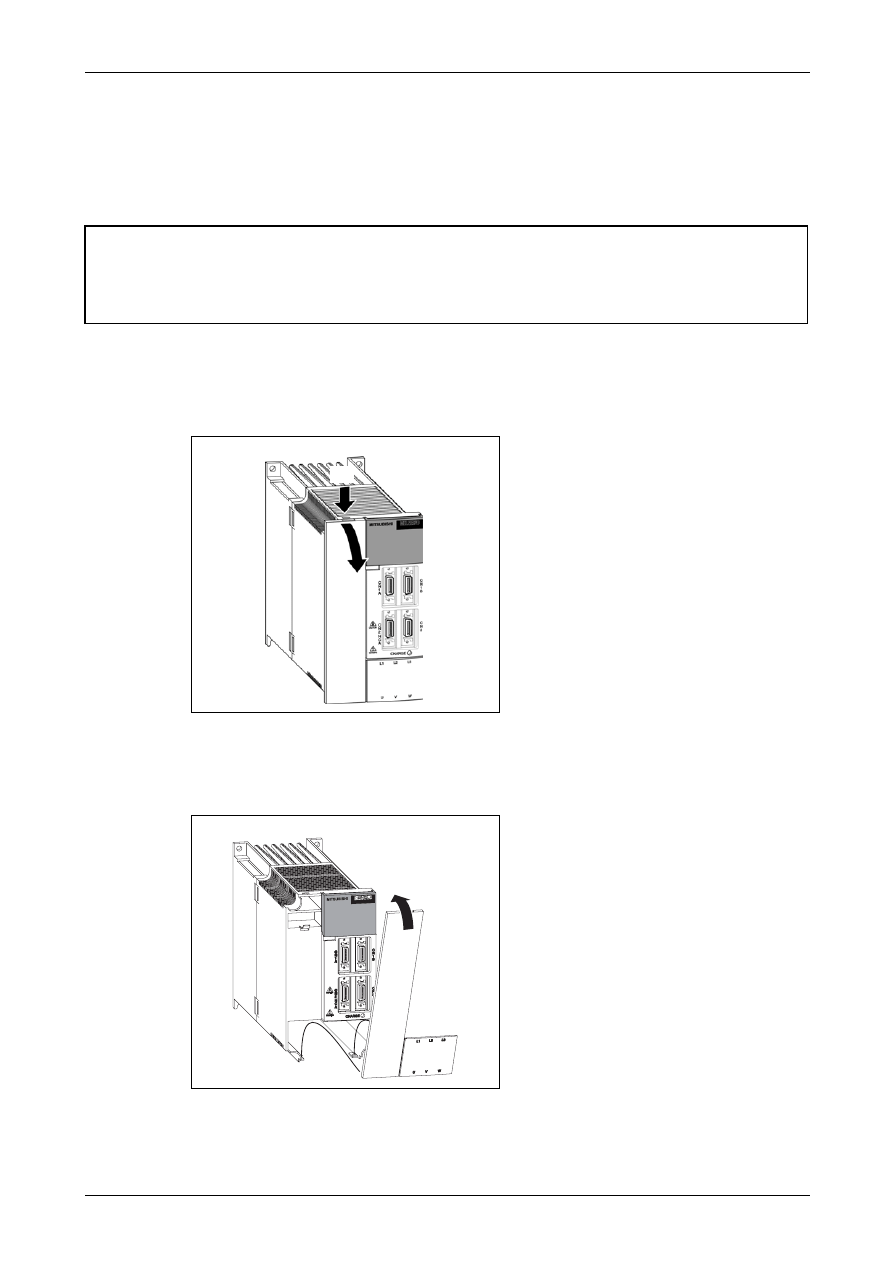
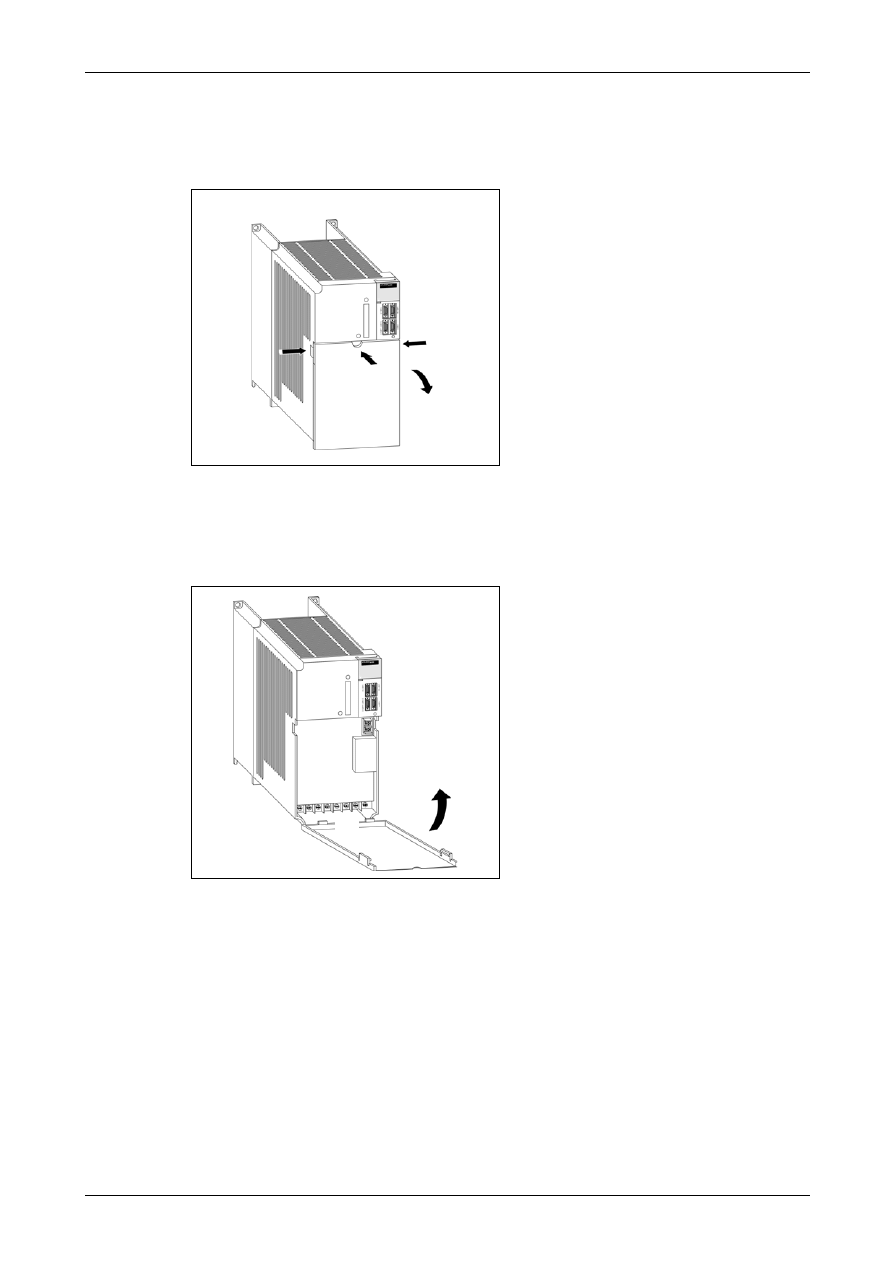
1.3 Zdejmowanie
i
zakładanie pokrywy czołowej
W modelach MR-J2S-200A i powyżej w celu uzyskania dostępu do uchwytu baterii, listwy
zaciskowej zasilania obwodu głównego i serwosilnika (TE1) oraz zasilania obwodów sterowa-
nia (TE2) konieczne jest zdjęcie pokrywy czołowej.
Zdejmowanie pokrywy czołowej w modelach MR-J2S-200A i MR-J2S-350A
a Wcisnąć zatrzask w pokrywie czołowej w dół.
b Pociągnąć pokrywę czołową do siebie.
Zakładanie pokrywy czołowej w modelach MR-J2S-200A i MR-J2S-350A
a Wstawić pokrywę czołową w zaczepy obudowy serwowzmacniacza.
b Docisnąć pokrywę czołową do obudowy serwowzmacniacza aż do zatrzaśnięcia zatrzasku.
!!!
ZAGROŻENIE:
Przed zdjęciem pokrywy czołowej należy bezwzględnie odłączyć zasilanie sieciowe i
odczekać co najmniej 10 minut. Czas ten jest potrzebny do rozładowania kondensa-
torów w obwodzie mocy do napięcia o bezpiecznej wartości.
Rys. 1-7:
Zdejmowanie pokrywy czołowej
S000513T
Rys. 1-8:
Zakładanie pokrywy czołowej
S000514E
a
b
a
b
Funkcje użytkowe i konfiguracja
Zdejmowanie i zakładanie pokrywy czołowej
1 - 8
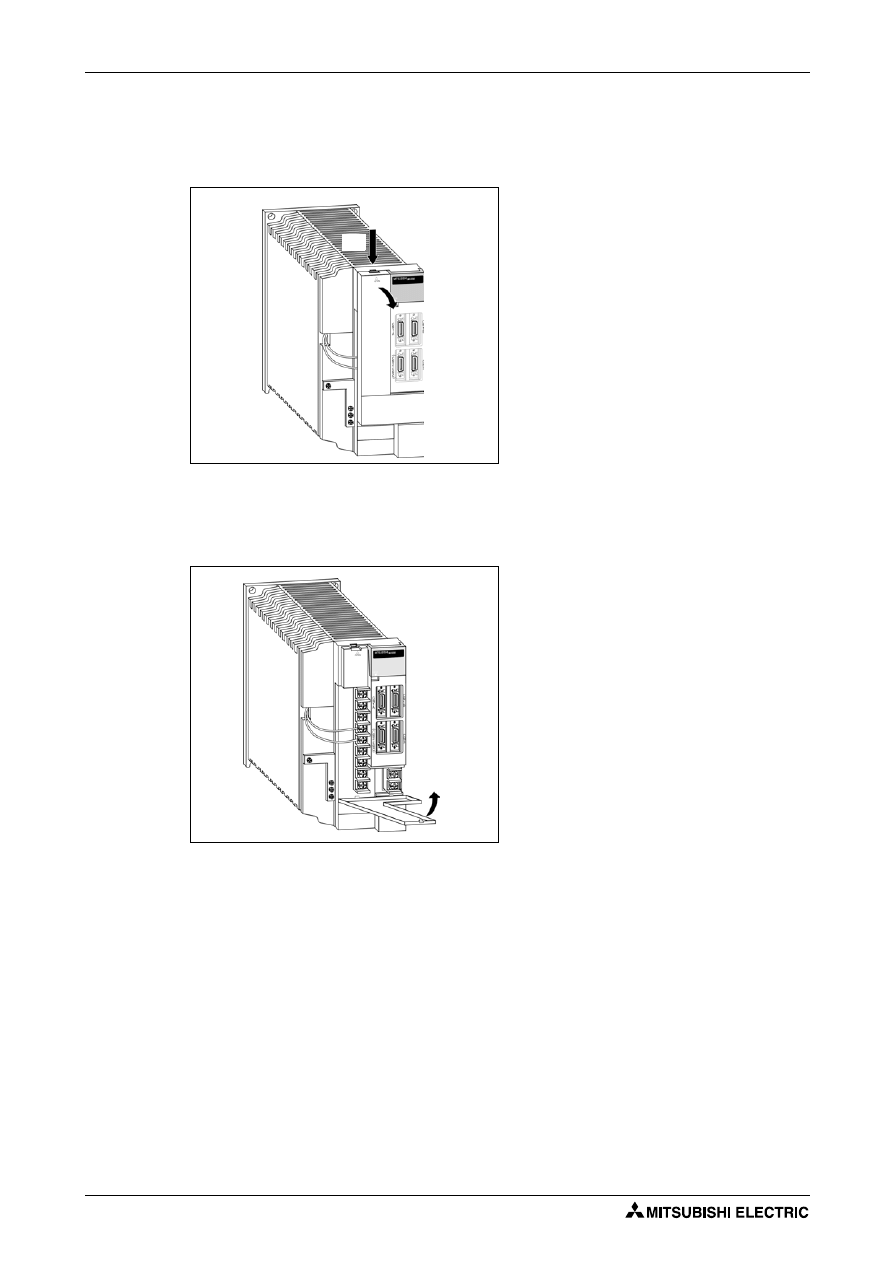
Zdejmowanie pokrywy czołowej w modelu MR-J2S-500A
a Wcisnąć zatrzask w pokrywie czołowej w dół.
b Pociągnąć pokrywę czołową do siebie.
Zakładanie pokrywy czołowej w modelu MRJ2S-500A
a Wstawić pokrywę czołową w zaczepy obudowy serwowzmacniacza.
b Docisnąć pokrywę czołową do obudowy serwowzmacniacza aż do zatrzaśnięcia zatrzasku.
Rys. 1-9:
Zdejmowanie pokrywy czołowej
S000909T
Rys. 1-10:
Zakładanie pokrywy czołowej
S000910T
a
b
2
1
Zdejmowanie i zakładanie pokrywy czołowej
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 9
Zdejmowanie pokrywy czołowej w modelu MR-J2S-500A
a Wcisnąć zatrzaski z boków pokrywy czołowej do środka.
b Trzymając za otwór w centralnej części pokrywy czołowej pociągnąć ją do siebie.
Zakładanie pokrywy czołowej w modelu MRJ2S-700A
a Wstawić pokrywę czołową w zaczepy obudowy serwowzmacniacza.
b Docisnąć pokrywę czołową do obudowy serwowzmacniacza aż do zatrzaśnięcia zatrza-
sków
Rys. 1-11:
Zdejmowanie pokrywy czołowej
S000911T
Rys. 1-12:
Zakładanie pokrywy czołowej
S000912T
1
2
1
2
2
1
Funkcje użytkowe i konfiguracja
Elementy obsługi
1 - 10
1.4 Elementy
obsługi
1.4.1 Serwowzmacniacz
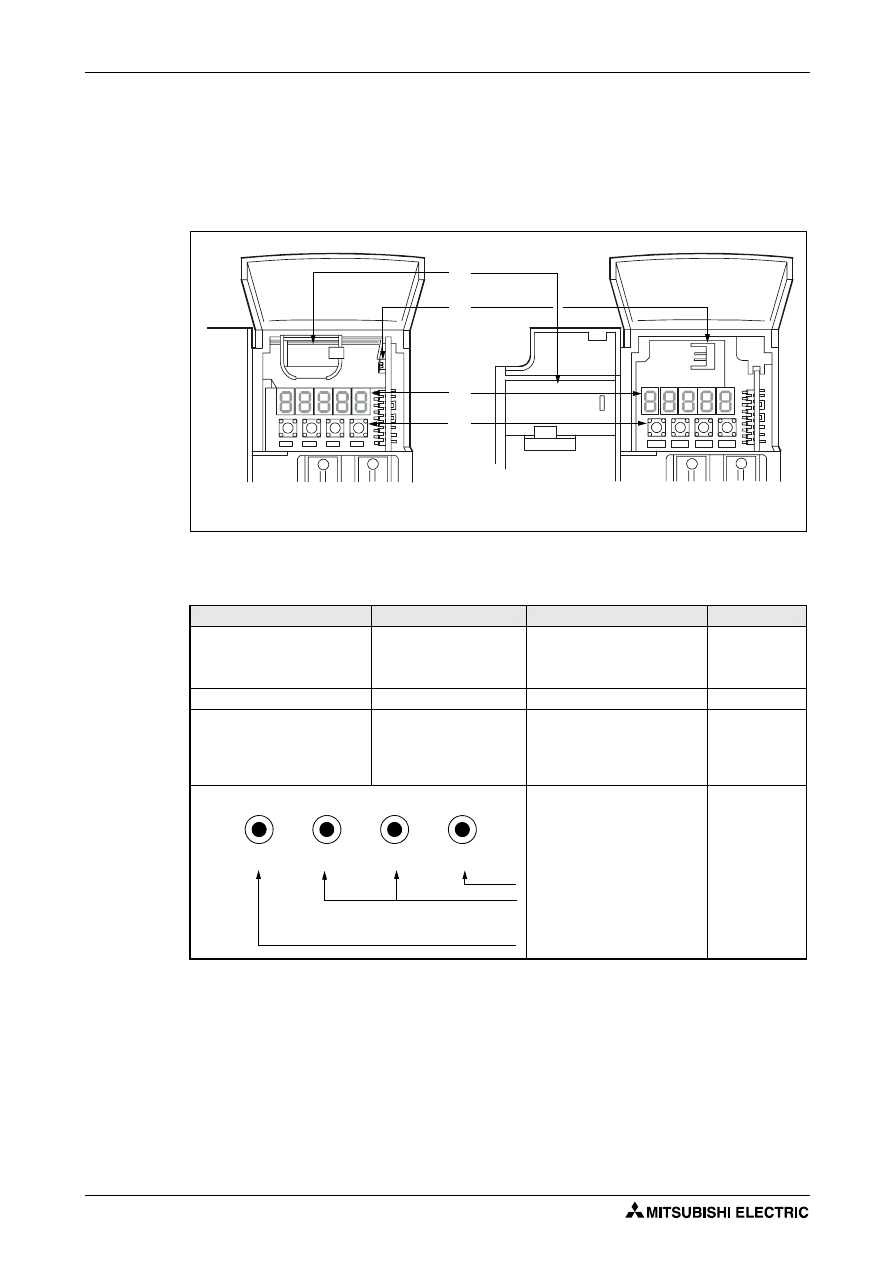
Modele od MR-J2S-10A do MR-J2S-350A
S000859C
Rys. 1-13: Serwowzmacniacze od MR-J2S-10A do MR-J2S-350A
Nr
Oznaczenie
Opis
Patrz
1
Uchwyt baterii
Służy do wstawienia opcjonalnej
baterii, podtrzymującej pamięć
w absolutnym systemie pozyc-
jonowania
2
Złącze baterii (CON1)
Służy do podłączenia baterii
3
Wyświetlacz
Pięcioznakowy wyświetlacz 7-
segmentowy LED do wyświetla-
nia komunikatów o stanie ser-
wonapędu, kodów alarmu i
wartości parametrów
4
Klawisze operacyjne
Służą do przełączania wyświet-
lanych wielkości, przełączania
trybów pracy oraz wprowadza-
nia wartości parametrów
Zapamiętanie danych
Zmiana wyświetlanej wielkości
lub wartości wyświetlanej pozycji
Zmiana funkcji lub trybu pracy
Tab. 1-1: Elementy obsługi i ich przeznaczenie
MODE
UP
DOWN
SET
MODE
UP
DOWN
SET
3
4
2
1
MR-J2S-100A lub poniżej
MR-J2S-200A i MR-J2S-350A
MODE
UP
DOWN
SET
Elementy obsługi
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 11
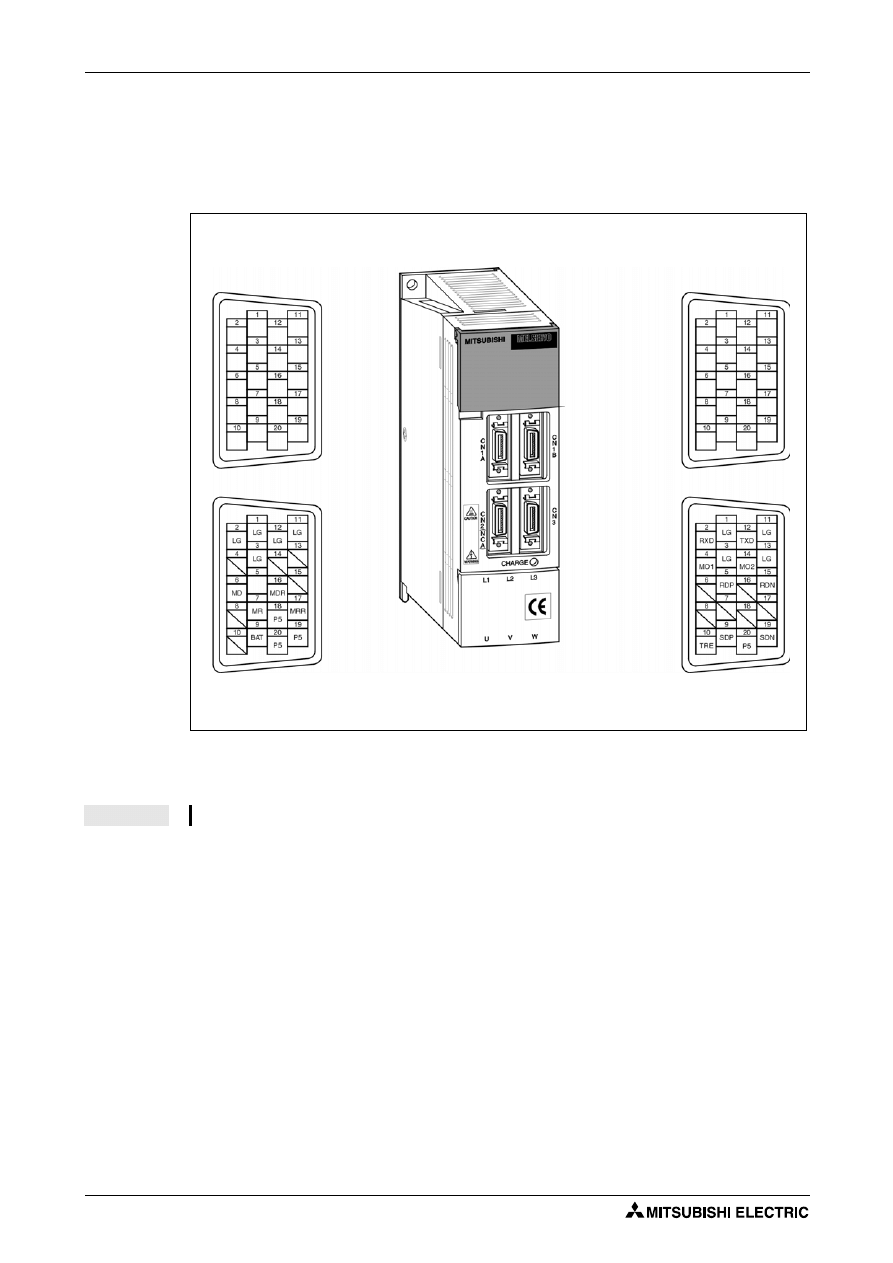
S000512C
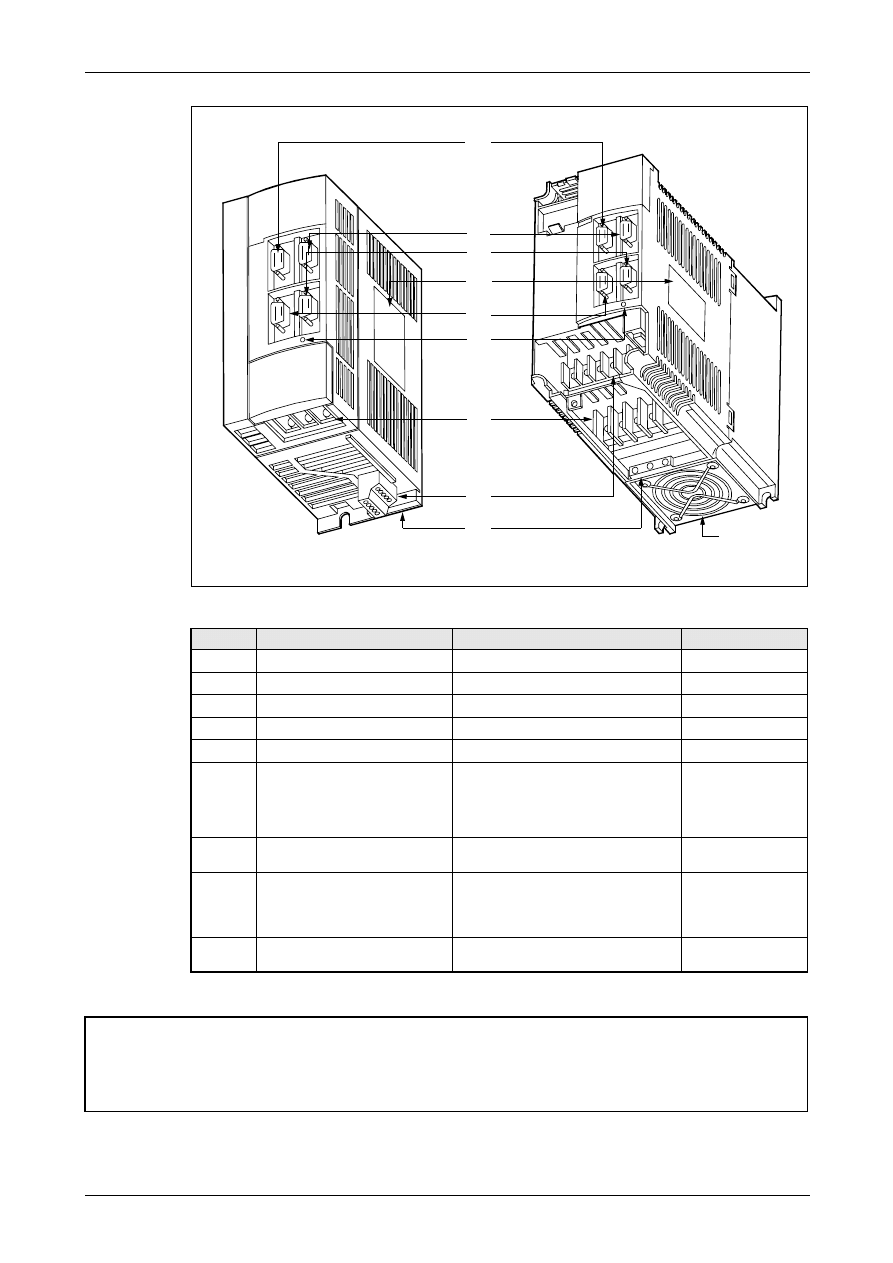
Rys. 1-14: Serwowzmacniacze od MR-J2S-10A do MR-J2S-350A
Nr
Oznaczenie
Opis
Patrz
1
Wejścia/wyjścia sygnałów (CN1A)
Obsługa sygnałów I/O
2
Wejścia/wyjścia sygnałów (CN1B)
Obsługa sygnałów I/O
3
Złącze komunikacyjne (CN3)
Podłączenie komputera PC itp.
4
Tabliczka znamionowa
—
5
Złącze enkodera (CN2)
Podłączenie enkodera serwosilnika
6
Dioda LED CHARGE
Dioda świeci, gdy w obwodach mocy
obecne jest niebezpieczne napięcie.
Przy świecącej diodzie nie należy do-
tykać zacisków ani wykonywać żadnych
czynności instalacyjnych
—
7
Listwa zaciskowa zasilania
głównego (obwodów mocy) (TE1)
Podłączenie zasilania obwodu mocy ser-
wowzmacniacza i serwosilnika
8
Listwa zaciskowa zasilania
obwodów sterowania (TE2)
Podłączenie zasilania obwodów sterowa-
nia serwowzmacniacza i luzownika ser-
wosilnika
9
Listwa uziemienia ochronnego
(PE)
Uziemienie ochronne serwonapędu
Tab. 1-2: Elementy serwowzmacniacza i ich przeznaczenie
!
OSTRZEŻENIE:
Złącza CN1A, CN1B, CN3 und CN2 mają identyczny kształt. Pomyłka w podłączeniu
może spowodować uszkodzenie serwowzmacniacza lub podłączanego urządzenia.
3
4
2
1
7
5
6
8
9
MR-J2S-100A i poniżej
MR-J2S-200A i MR-J2S-350A
Wentylator
Funkcje użytkowe i konfiguracja
Elementy obsługi
1 - 12
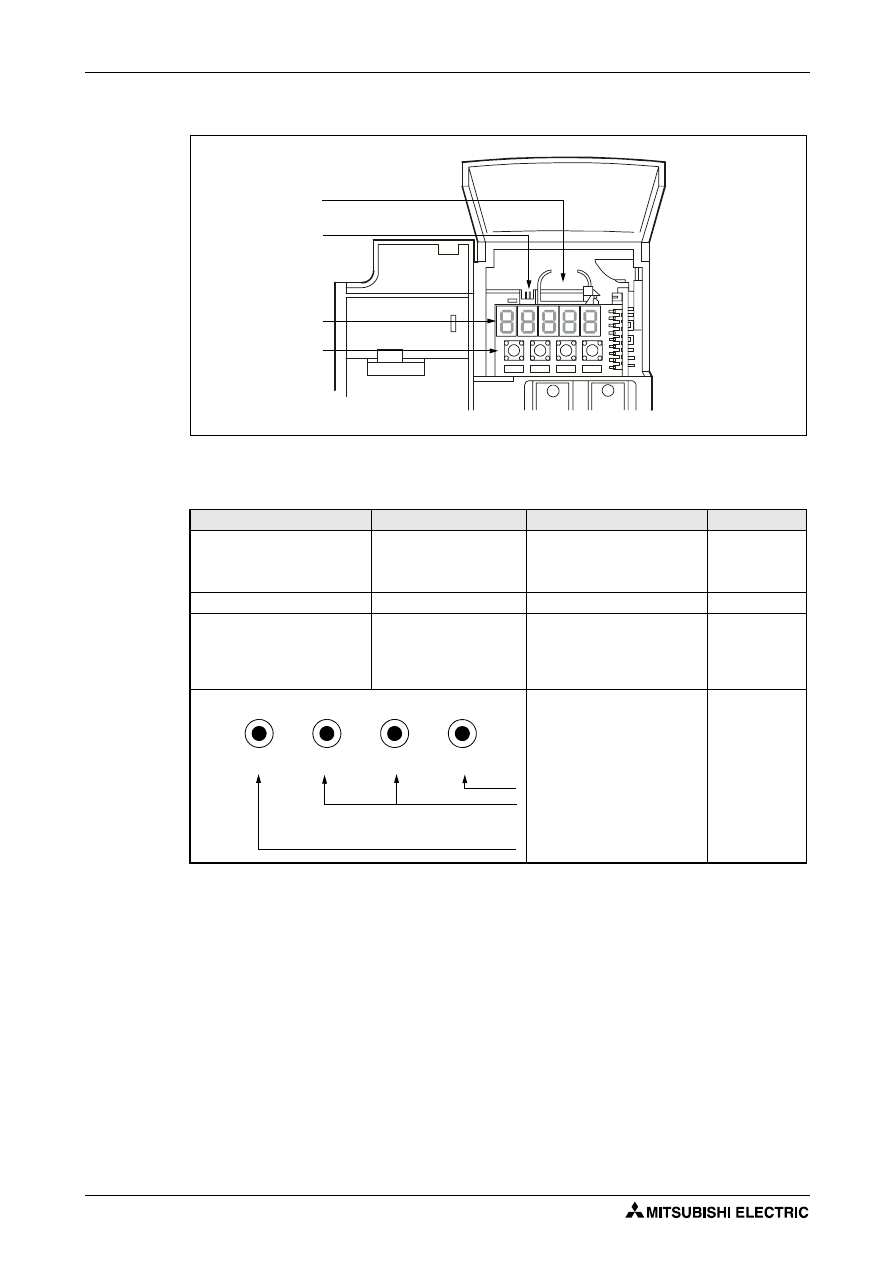
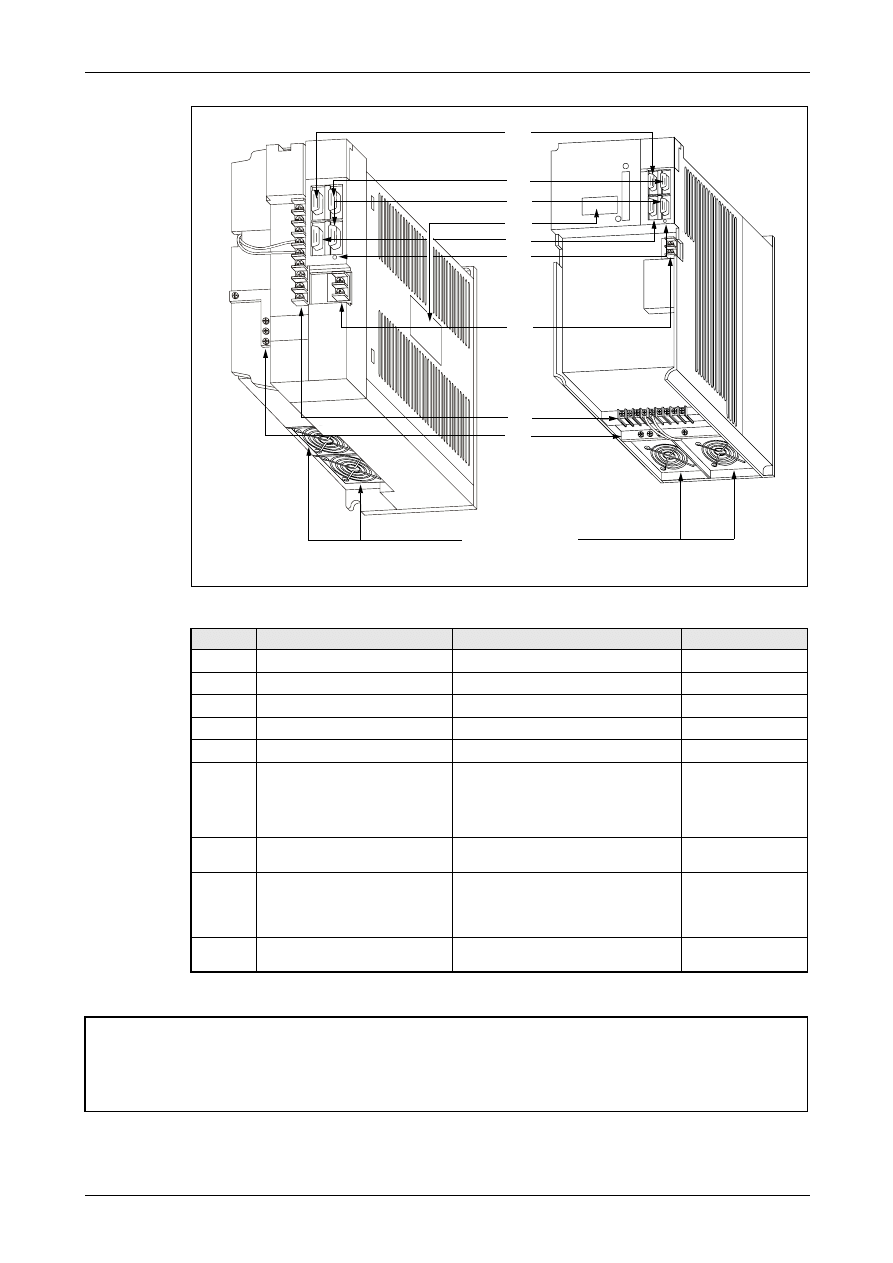
Modele MR-J2S-500A i MR-J2S-700A
S000915C
Rys. 1-15: Serwowzmacniacze MR-J2S-500A i MR-J2S-700A
Nr
Oznaczenie
Opis
Patrz
1
Uchwyt baterii
Służy do wstawienia opcjonalnej
baterii, podtrzymującej pamięć
w absolutnym systemie pozyc-
jonowania
2
Złącze baterii (CON1)
Służy do podłączenia baterii
3
Wyświetlacz
Pięcioznakowy wyświetlacz 7-
segmentowy LED do wyświetla-
nia komunikatów o stanie ser-
wonapędu, kodów alarmu i
wartości parametrów
4
Klawisze operacyjne
Służą do przełączania wyświet-
lanych wielkości, przełączania
trybów pracy oraz wprowadza-
nia wartości parametrów
Zapamiętanie danych
Zmiana wyświetlanej wielkości
lub wartości wyświetlanej pozycji
Zmiana funkcji lub trybu pracy
Tab. 1-3: Elementy obsługi i ich przeznaczenie
MODE
UP
DOWN
SET
3
4
2
1
MODE
UP
DOWN
SET
Elementy obsługi
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 13
S000916C
Rys. 1-16: Serwowzmacniacze MR-J2S-500A i MR-J2S-700A
Nr
Oznaczenie
Opis
Patrz
1
Wejścia/wyjścia sygnałów (CN1A)
Obsługa sygnałów I/O
2
Wejścia/wyjścia sygnałów (CN1B)
Obsługa sygnałów I/O
3
Złącze komunikacyjne (CN3)
Podłączenie komputera PC itp.
4
Tabliczka znamionowa
—
5
Złącze enkodera (CN2)
Podłączenie enkodera serwosilnika
6
Dioda LED CHARGE
Dioda świeci, gdy w obwodach mocy
obecne jest niebezpieczne napięcie.
Przy świecącej diodzie nie należy do-
tykać zacisków ani wykonywać żadnych
czynności instalacyjnych
—
7
Listwa zaciskowa zasilania
głównego (obwodów mocy) (TE1)
Podłączenie zasilania obwodu mocy ser-
wowzmacniacza i serwosilnika
8
Listwa zaciskowa zasilania
obwodów sterowania (TE2)
Podłączenie zasilania obwodów sterowa-
nia serwowzmacniacza i luzownika ser-
wosilnika
9
Listwa uziemienia ochronnego
(PE)
Uziemienie ochronne serwonapędu
Tab. 1-4: Elementy i ich przeznaczenie
!
OSTRZEŻENIE:
Złącza CN1A, CN1B, CN3 und CN2 mają identyczny kształt. Pomyłka w podłączeniu
może spowodować uszkodzenie serwowzmacniacza lub podłączanego urządzenia.
MR-J2S-500A
MR-J2S-700A
Wentylatory
3
4
2
1
7
5
6
8
9
Funkcje użytkowe i konfiguracja
Elementy obsługi
1 - 14
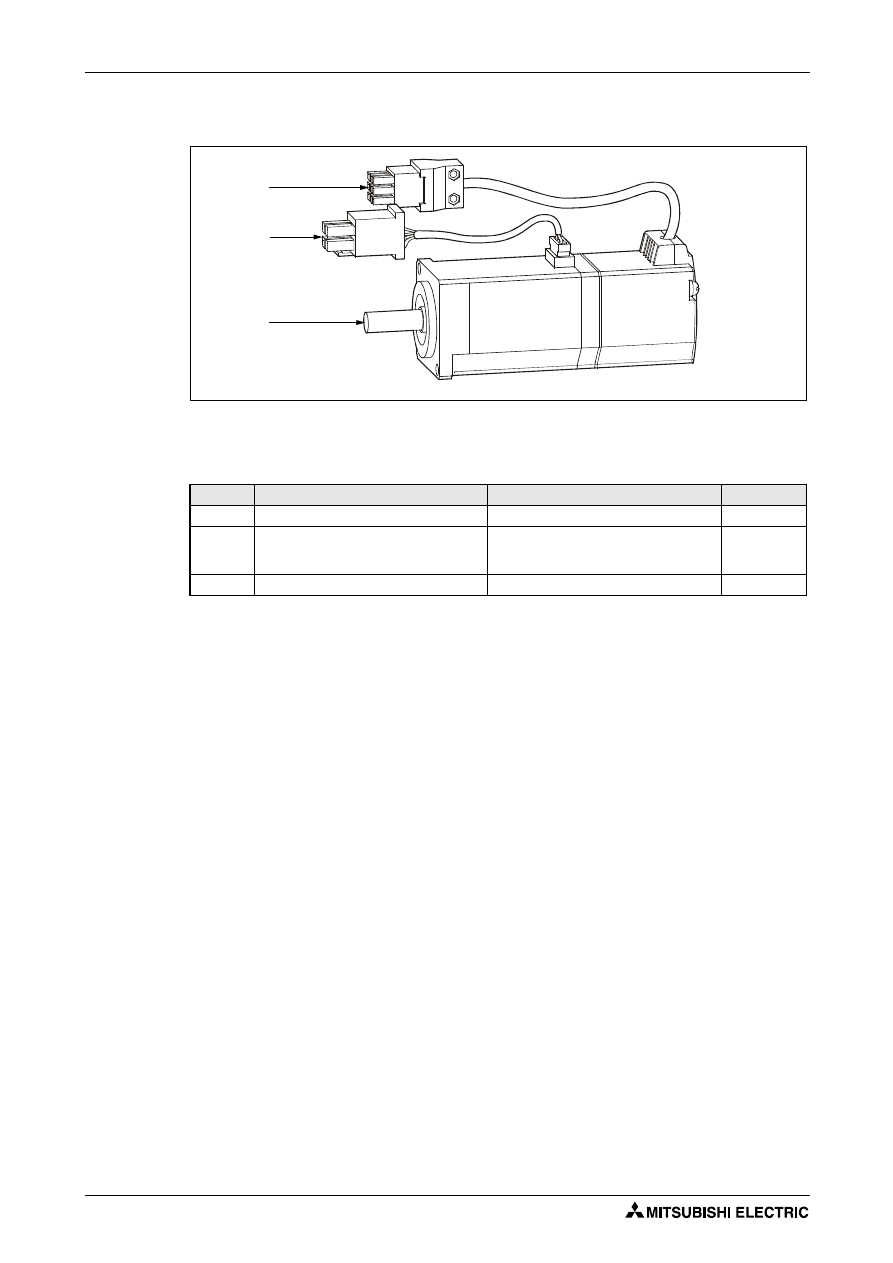
1.4.2 Serwosilnik
S000882C
Rys. 1-17: Serwosilnik
Nr
Oznaczenie
Opis
Patrz
1
Wejście enkodera
Kabel połączeniowy enkodera
2
Zasilanie, luzownik
Zasilanie (U, V, W), uziemienie ochronne,
sterowanie luzownikiem (dla silników z
luzownikiem)
3
Wał serwosilnika
Wał napędowy
Tab. 1-5: Elementy połączeniowe serwosilnika
1
2
3
Funkcje
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 15
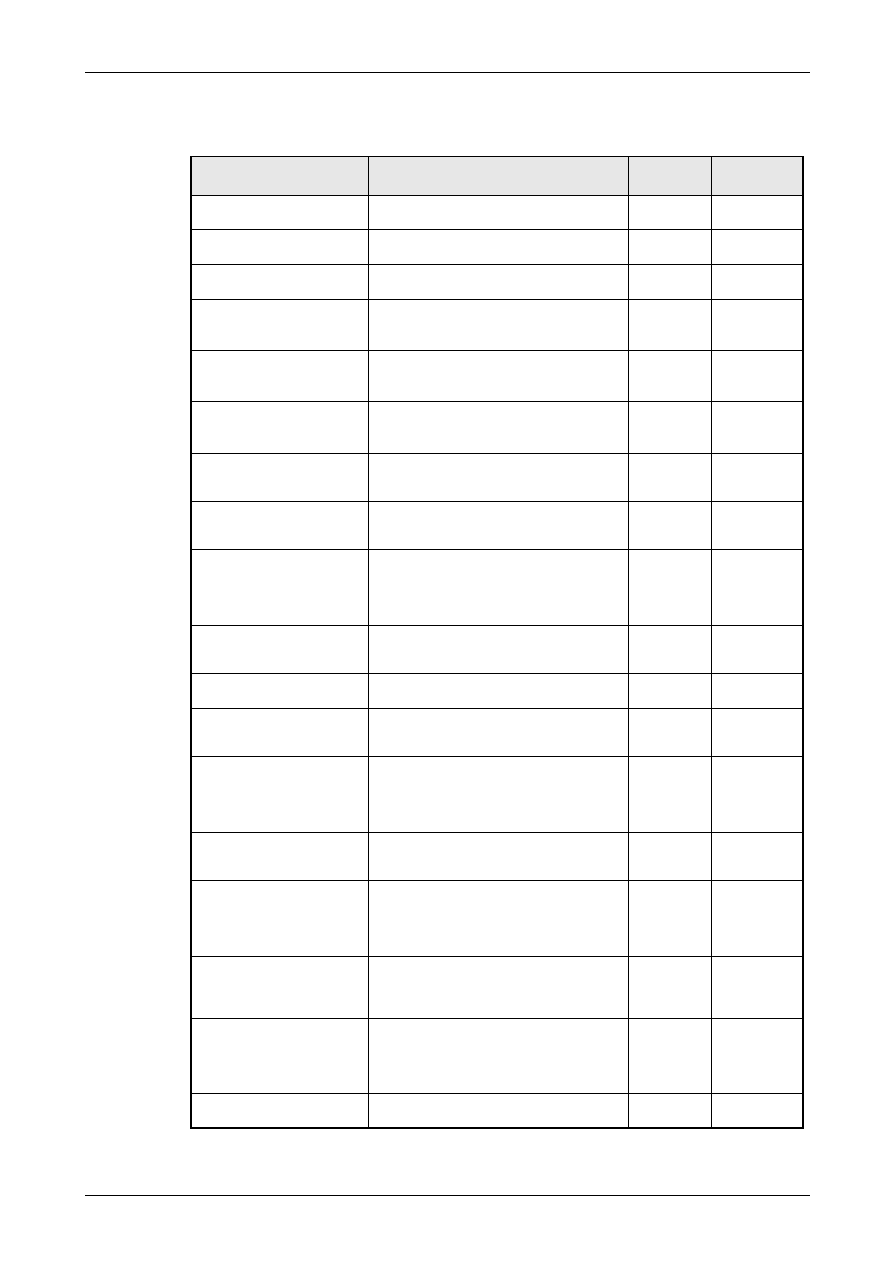
1.5 Funkcje
Funkcja
Opis
Tryb
sterowania
a
Patrz
Regulacja położenia (pozyc-
jonowanie)
Praca serwonapędu MR-J2-Super w trybie
pozycjonowania
P
Regulacja prędkości
Praca serwonapędu MR-J2-Super w trybie re-
gulacji prędkości
S
Regulacja momentu
Praca serwonapędu MR-J2-Super w trybie re-
gulacji momentu napędowego
T
Tryb przełączany między regu-
lacją położenia i prędkości.
Serwonapęd jest przełączany zewnętrznym
sygnałem między trybami regulacji położenia i
prędkości.
P/S
Tryb przełączany między regu-
lacją prędkości i momentu
Serwonapęd jest przełączany zewnętrznym
sygnałem między trybami regulacji prędkości i
momentu
S/T
Tryb przełączany między regu-
lacją momentu i położenia.
Serwonapęd jest przełączany zewnętrznym
sygnałem między trybami regulacji momentu i
położenia
T/P
Enkoder o wysokiej rozdzielc-
zości
Serwosilniki są wyposażone standardowo w
enkoder absolutny o rozdzielczości 131072
impulsów na obrót
P, S, T
—
System pozycjonowania abso-
lutnego
Po jednorazowym ustaleniu punktu bazowego
nie ma konieczności bazowania napędu po
każdym wyłączeniu zasilania
P
Przełączane wartości wzmoc-
nień
Możliwe jest stosowanie różnych wartości
wzmocnienia regulatora podczas biegu i przy
zatrzymanym silniku lub przełączanie wartości
wzmocnienia zewnętrznym sygnałem podczas
pracy.
P, S
Adaptacyjne tłumienie wibracji
Serwonapęd MR-J2-Super wykrywa rezo-
nanse mechaniczne i automatycznie dobiera
parametry filtrów antywibracyjnych
P, S, T
Tłumienie mikrowibracji
Tłumione są wibracje o amplitudzie
+/−1 impuls,
powstające przy zatrzymywaniu serwosilnika
P
Filtr dolnoprzepustowy
Tłumienie rezonansów o wysokiej częstotli-
wości, powstających w serwonapędach o szer-
okim paśmie przenoszenia
P, S, T
Analizator maszyny
Po połączeniu serwonapędu MR-J2-Super z
komputerem PC z oprogramowaniem narzędzi-
owym system przeprowadza analizę częstotli-
wościową kompletnego systemu
elektromechanicznego
P
Symulator maszyny
Na podstawie danych z analizatora maszyny
lub wprowadzonych niezależnie możliwa jest
symulacja pracy maszyny na PC
P
Automatyczne poszukiwanie
optymalnych wartości wzmoc-
nienia
Komputer PC połączony z serwowzmacniac-
zem automatycznie wylicza wartości wzmoc-
nień optymalne z punktu widzenia
pozycjonowania (minimalny czas przy braku
przerzutów)
P
Przekładnia elektroniczna
Służy do dopasowania charakterystyk maszyny
i serwonapędu. Liczba impulsów zadających
może być przemnażana przez współczynnik od
1/50 do 50, zadawany parametrami Pr. 3 i Pr. 4.
P
Parametr
Pr. 3, 4
Autotuning w czasie rzeczy-
wistym
Automatyczne dostrojenie parametrów regula-
tora serwowzmacniacza do wartości optymal-
nych przy zmiennym obciążeniu. Funkcja
znacznie udoskonalona w porównaniu z serią
MR-J2-A.
P, S
Rozdz. 4.4.3,
Parametr Pr. 2
Wygładzanie charakterystyk
dynamicznych
Poprawiona płynność zależności prędkości od
zmian częstotliwości impulsów zadających
P
Parametr 7
Tab. 1-6: Opis funkcji (1)
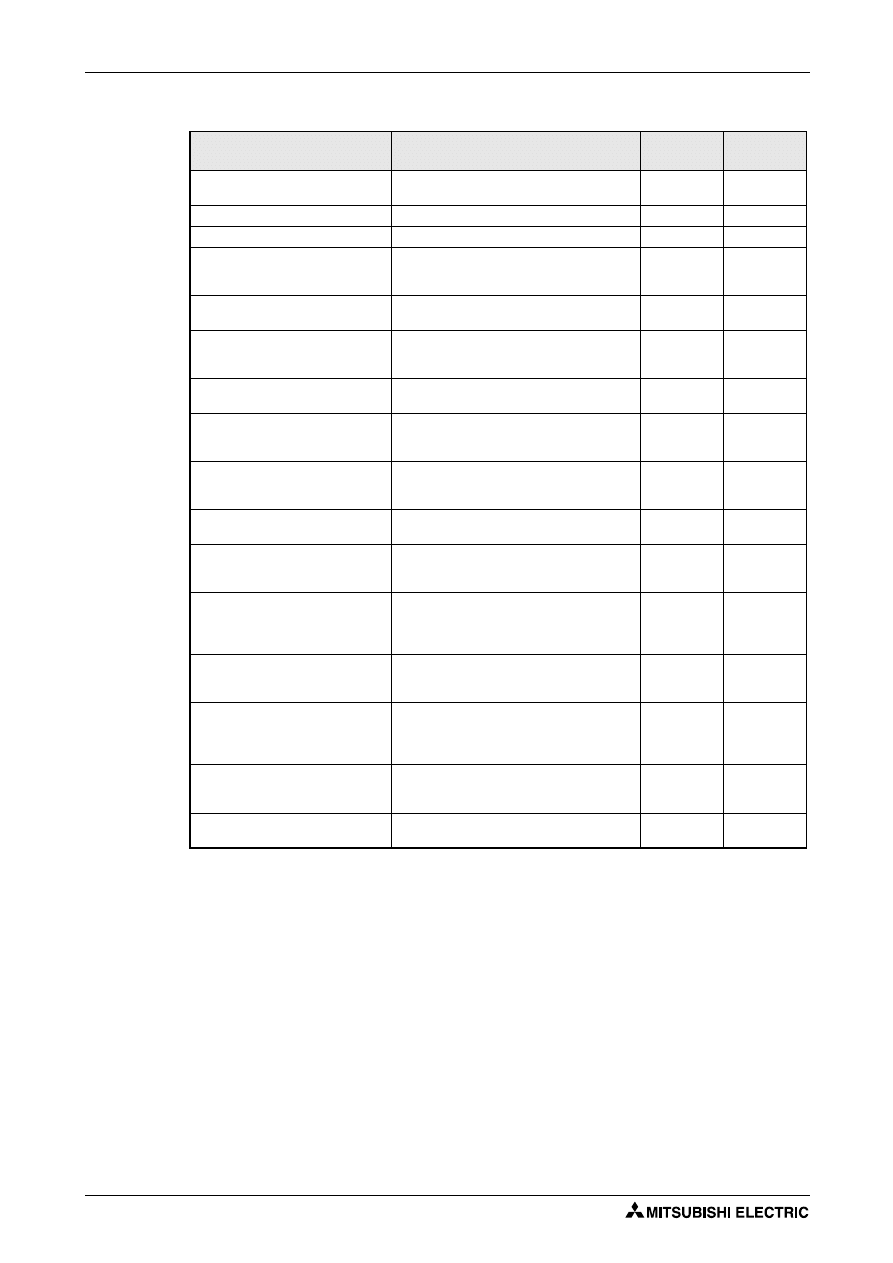
Funkcje użytkowe i konfiguracja
Funkcje
1 - 16
a
P
: Regulacja położenia (pozycjonowanie)
S
: Regulacja prędkości
T
: Regulacja momentu
P/S : Tryb przełączany między regulacją położenia i prędkości
S/T : Tryb przełączany między regulacją prędkości i momentu
T/P : Tryb przełączany między regulacją momentu i położenia
Funkcja
Opis
Tryb
sterowania
a
Patrz
Krzywa S (sinoidalna) rozpędzania/
hamowania
Płynne rozpędzanie i hamowanie
S
Parametr 13
Analogowe wyjścia monitorowania
Dwa napięciowe wyjścia analogowe
P, S, T
Parametr 17
Kasowanie historii alarmów
Kasowanie komunikatów alarmu z pamięci
P, S, T
Parametr 16
Restart po zaniku zasilania
Gdy po chwilowym zaniku napięcie zasilania
wraca do normy, możliwy jest restart przez
proste podanie sygnału startu
S
Parametr 20
Wybór formy ciągu impulsów
Możliwy jest wybór jednej z czterech form
zadającego ciągu impulsów
P
Parametr 21
Programowane wejścia
dwustanowe
Wejściowe sygnały sterujące (Start w prawo/
lewo, servo-on itd.) mogą być przypisywane
do wybranych wejść
P, S, T
Parametry
43–48
Ograniczenie momentu
Moment obrotowy serwosilnika może zostać
dowolnie ograniczony
P, S
Parametr 28
Ograniczenie prędkości
Prędkość serwosilnika może zostać dowolnie
ograniczona
T
Parametr
Pr. 8–10 i 72–
75
Wyświetlanie stanu
Komunikaty o stanie serwonapędu widoczne
na 5-znakowym wyświetlaczu 7-Segmen-
towym LED.
P, S, T
Wyświetlanie stanu wejść/wyjść
Na wyświetlaczu może być widoczny stan
wejść/wyjść dwustanowych
P, S, T
Wymuszanie stanu wyjścia
dwustanowego
Niezależnie od rzeczywistego stanu ser-
wonapędu można do celów kontrolnych
wymuszać wybrany stan wyjść
P, S, T
Automatyczny offset sygnału VC
Jeżeli serwosilnik nie zatrzymuje się przy 0 V
sygnale zadającym (VC) lub ograniczającym
(VLA) napięcie zadawania jest automatyc-
znie korygowane
S, T
Praca testowa
Operacje próbne obejmują pracę krokową
(JOG), pracę bez silnika, operację pozyc-
jonowania i wymuszanie stanu wyjść
P, S, T
Opcjonalny zewnętrzny opornik
hamujący
Jeżeli moc wbudowanego opornika
hamującego jest zbyt niska, stosuje się
opornik zewnętrzny o mocy odpowiedniej do
wymogów obciążenia
P, S, T
Oprogramowanie narzędziowe
W połączeniu z komputerem PC dostępna
jest parametryzacja, praca próbna, monitor-
owanie i diagnostyka napędu itd.
P, S, T
—
Wydawanie kodu alarmu
W stanie alarmu możliwe jest wydanie jego
kodu w postaci 3-bitowej liczby BCD
P, S, T
Tab. 1-6: Opis funkcji (2)
Konfiguracja serwonapędu
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 17
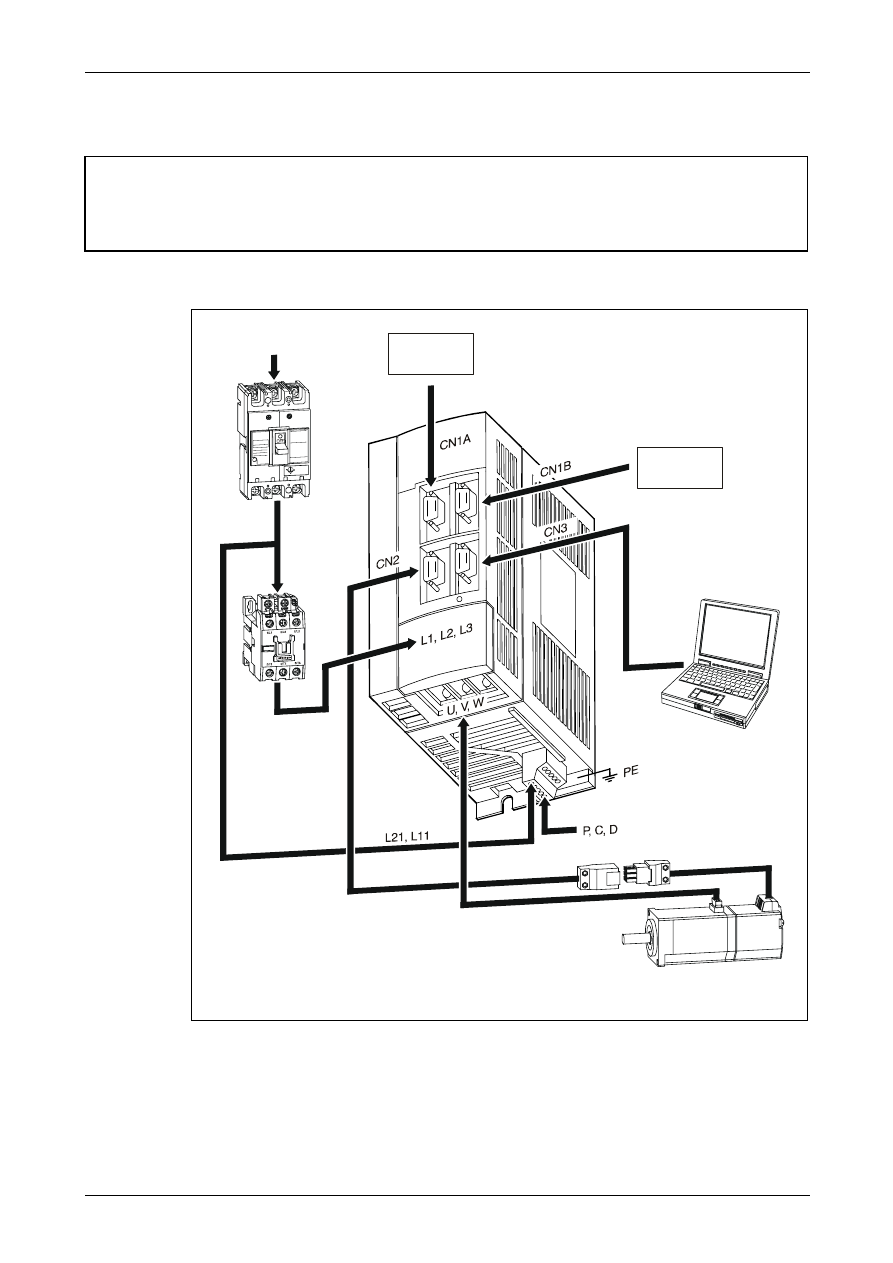
1.6 Konfiguracja
serwonapędu
Konfiguracja dla serwowzmacniaczy MR-J2S-10A do MR-J2S-100A
!
OSTRZEŻENIE:
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie łączyć zacisk
uziemienia ochronnego serwowzmacniacza z listwą uziemiającą szafy sterowniczej.
S000860C
Rys. 1-18: Przegląd konfiguracji serwonapędu dla wzmacniaczy MR-J2S-100A i poniżej
Wyłącznik
Interfejs I/O
Stycznik
Serwosilnik
Komputer PC
Kabel enkodera
Opcjonalny opornik hamujący
Uziemienie
Interfejs I/O
Zasilanie sieciowe
Serwowzmacniacz
Zasilanie
serwosilnika
Funkcje użytkowe i konfiguracja
Konfiguracja serwonapędu
1 - 18
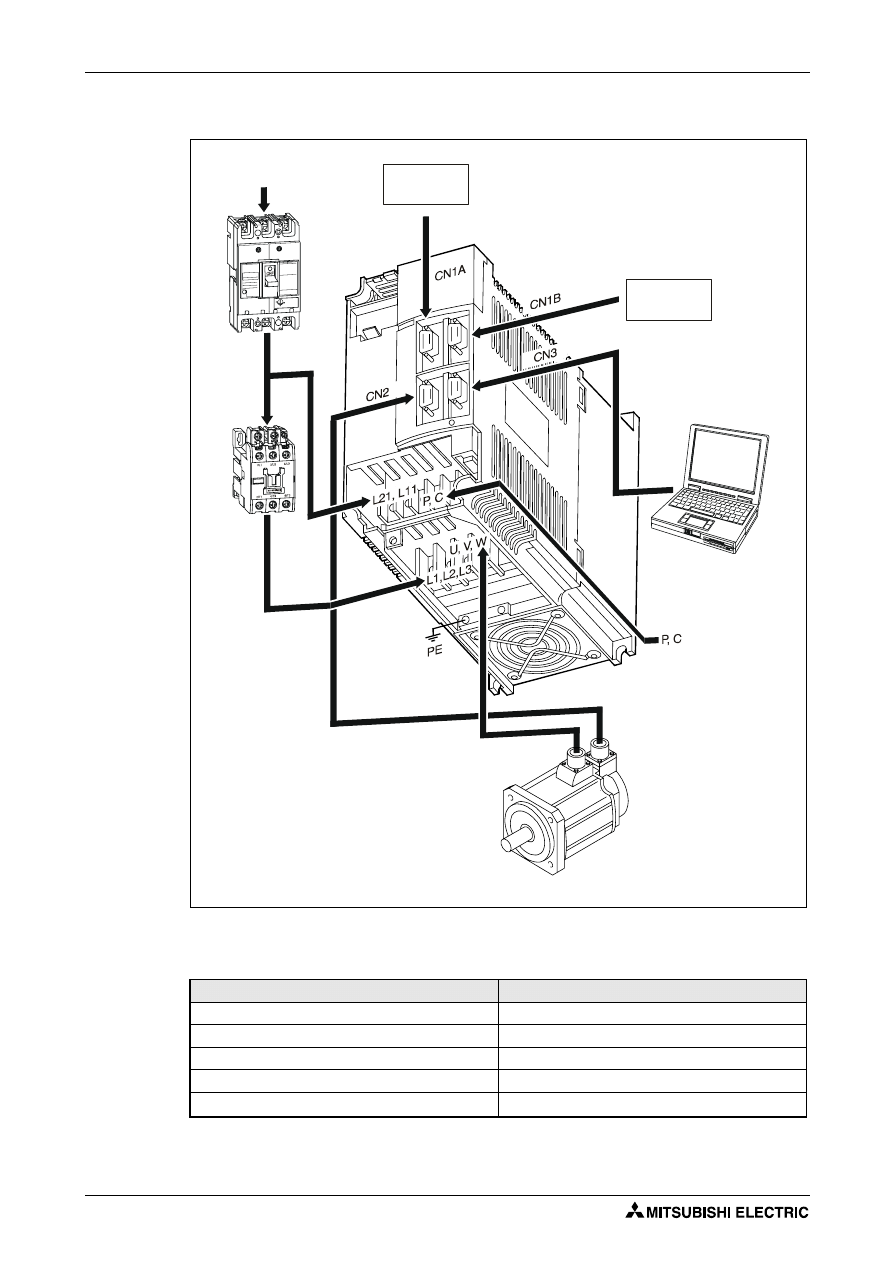
Konfiguracja dla serwowzmacniaczy MR-J2S-200A i MR-J2S-350A
S000517C
Rys. 1-19: Przegląd konfiguracji serwonapędu dla wzmacniaczy MR-J2S-200A, MR-J2S-350A
Elementy peryferyjne
Patrz
Wyłącznik nadprądowy
Stycznik
Opcjonalny zewnętrzny opornik hamujący
Kabel połączeniowy
Transformator (U
1
/ U
2
= 400 V / 230 V)
Tab. 1-7: Elementy peryferyjne
Wyłącznik
Interfejs I/O
Stycznik
Serwosilnik
Komputer PC
Kabel enkodera
Opcjonalny opornik
hamujący
Uziemienie
Zasilanie sieciowe
Serwowzmacniacz
Zasilanie
serwosilnika
Interfejs I/O
Konfiguracja serwonapędu
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 19
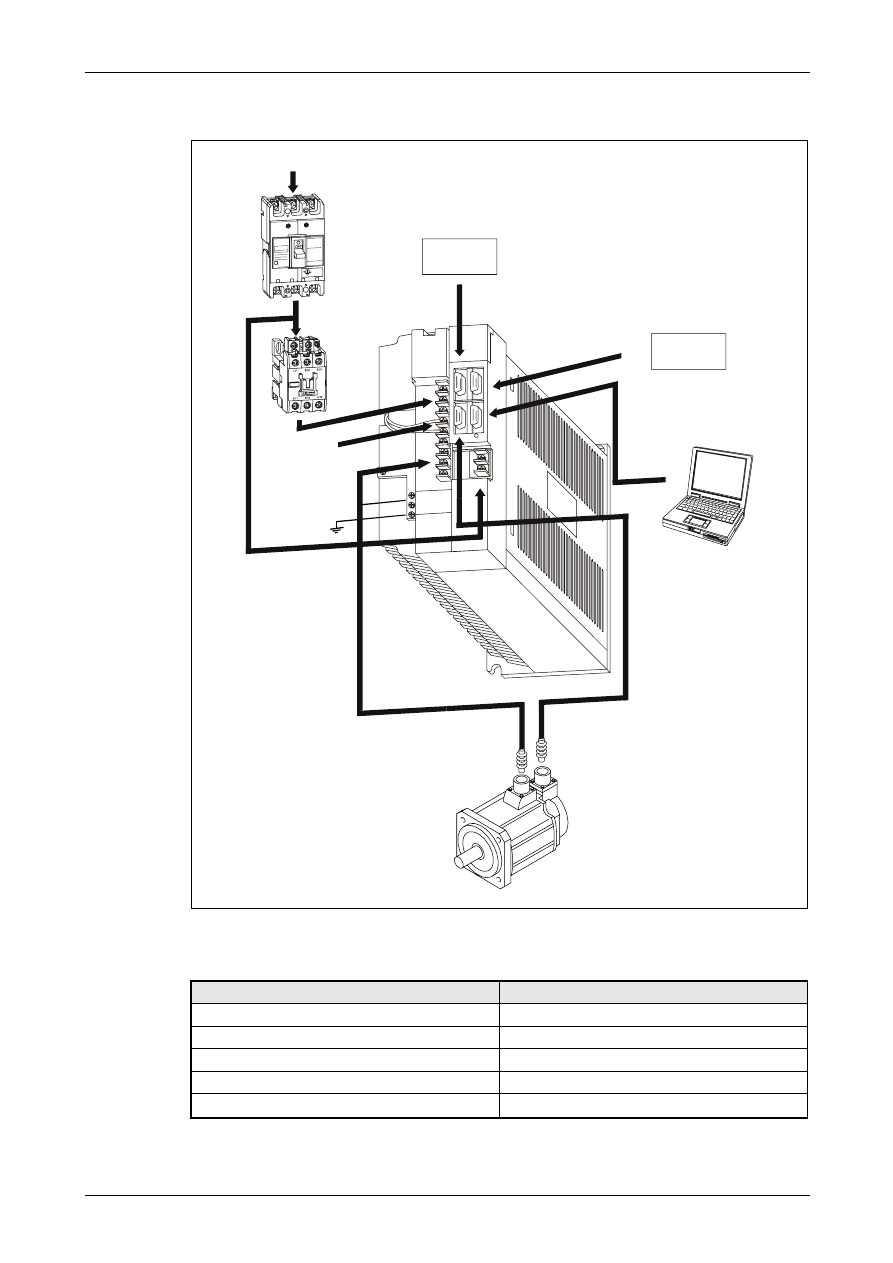
Konfiguracja dla serwowzmacniaczy MR-J2S-500A
S000917C
Rys. 1-20: Przegląd konfiguracji serwonapędu dla wzmacniacza MR-J2S-500A
Elementy peryferyjne
Patrz
Wyłącznik nadprądowy
Stycznik
Opcjonalny zewnętrzny opornik hamujący
Kabel połączeniowy
Transformator (U
1
/ U
2
= 400 V / 230 V)
Tab. 1-8: Elementy peryferyjne
Wyłącznik
Interfejs I/O
Stycznik
Serwosilnik
Komputer PC
Kabel enkodera
Opcjonalny opornik
hamujący
Uziemienie
Zasilanie sieciowe
Serwowzmacniacz
Zasilanie
serwosilnika
Interfejs I/O
CN1A
CN1B
CN3
CN2
L1, L2, L3
L21, L11
P, C
Funkcje użytkowe i konfiguracja
Konfiguracja serwonapędu
1 - 20
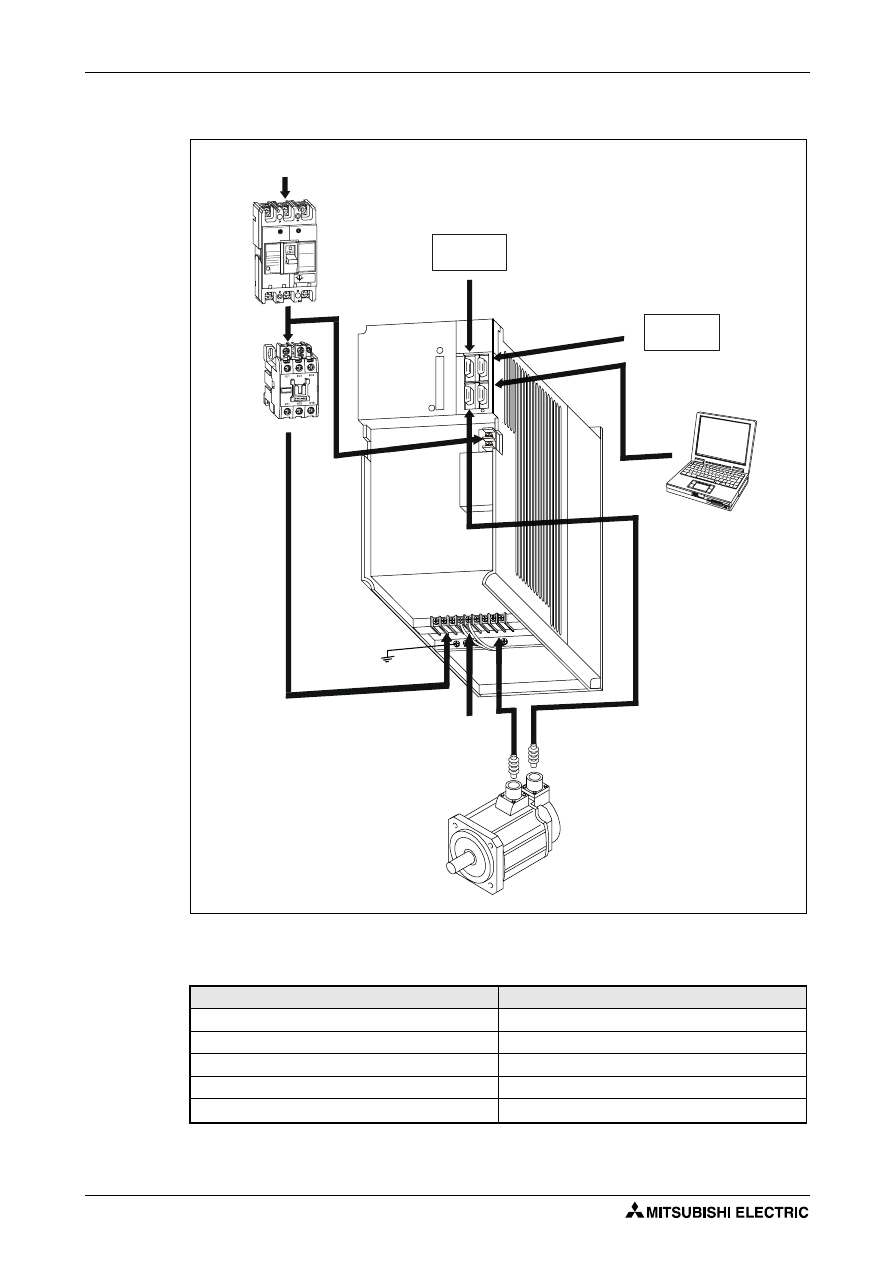
Konfiguracja dla serwowzmacniaczy MR-J2S-700A
S000918C
Rys. 1-21: Przegląd konfiguracji serwonapędu dla wzmacniacza MR-J2S-700A
Elementy peryferyjne
Patrz
Wyłącznik nadprądowy
Stycznik
Opcjonalny zewnętrzny opornik hamujący
Kabel połączeniowy
Transformator (U
1
/ U
2
= 400 V / 230 V)
Tab. 1-9: Elementy peryferyjne
Wyłącznik
Interfejs I/O
Stycznik
Serwosilnik
Komputer PC
Kabel enkodera
Opcjonalny opornik
hamujący
Uziemienie
Zasilanie sieciowe
Serwowzmacniacz
Zasilanie
serwosilnika
Interfejs I/O
CN1A
CN1B
CN3
CN2
L1, L2, L3
L21, L11
P, C

Konfiguracja serwonapędu
Funkcje użytkowe i konfiguracja
Serwonapędy MELSERVO MR-J2Super-A
1 - 21
NOTATKI:

Funkcje użytkowe i konfiguracja
Konfiguracja serwonapędu
1 - 22
Zalecenia ogólne
Montaż
Serwonapędy MELSERVO MR-J2Super-A
2 - 1
2
Montaż
2.1 Zalecenia
ogólne
!
OSTRZEŻENIE:
●
Serwowzmacniacz musi być zamontowany w pozycji pionowej zgodnie z podaną
orientacją, w przeciwnym wypadku może ulec uszkodzeniu.
●
Należy zachować wskazane minimalne odstępy między serwowzmacniaczem i
ściankami szafy montażowej lub innymi sąsiadującymi urządzeniami.
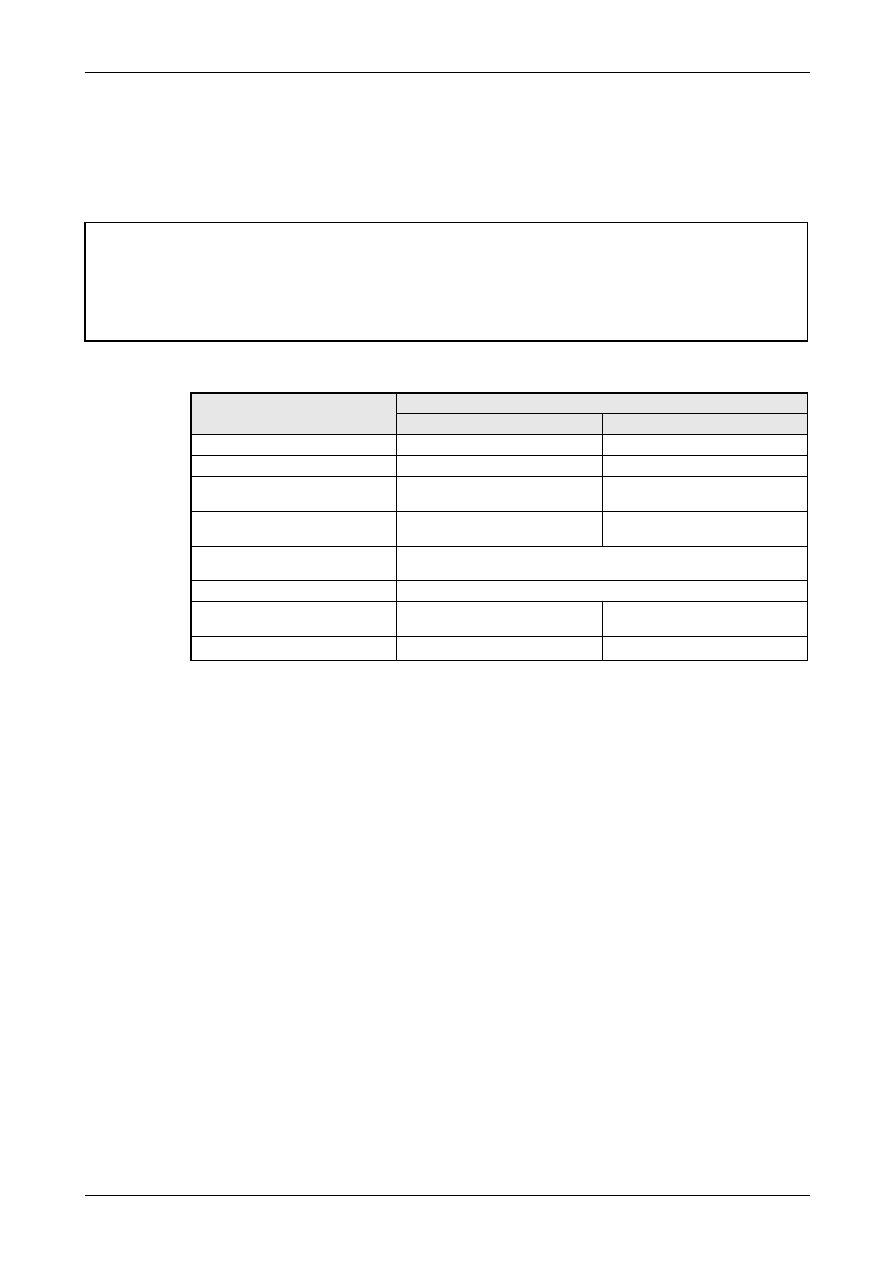
Warunki środowiska
Dane
Serwowzmacniacz
Serwosilnik
Temperatura otoczenia (praca)
0 do +55 °C (bez oszronienia)
0 do +40 °C (bez oszronienia)
Wilgotność względna (praca)
90% lub mniej (bez kondensacji)
80% lub mniej (bez kondensacji)
Temperatura otoczenia (przechowy-
wanie)
-20 do +65 °C
-15 do +70 °C
Wilgotność względna (przechowy-
wanie)
90% lub mniej (bez kondensacji)
90% lub mniej (bez kondensacji)
Otoczenie
Pomieszczenie zamknięte, bez bezpośredniego nasłonecznienia, wolne od
gazów aktywnych chemicznie, gazów palnych, oparów oleju, kurzu i brudu
Wysokość położenia
Najwyżej 1000m n.p.m.
Stopień ochrony
IP00
HC-KFS/MFS: IP55,
HC-SFS/RFS: IP65
Wibracje, m/s
2
nie więcej, niż 5,9 m/s
2
(0,6 G)
Patrz rozdział 2.1.2
Tab. 2-1: Wymagania środowiskowe
Montaż
Zalecenia ogólne
2 - 2
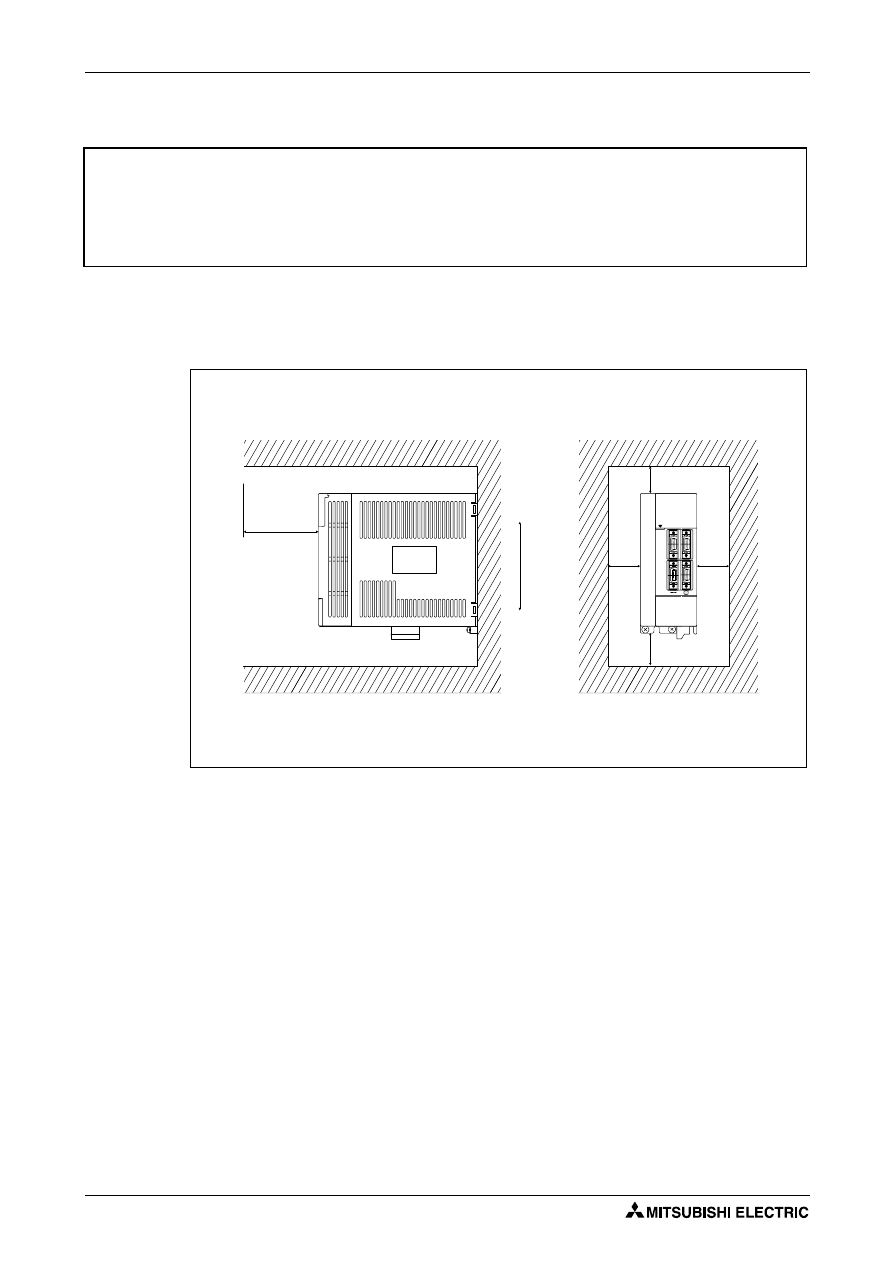
2.1.1 Montaż serwowzmacniaczy
Montaż serwowzmacniacza
Serwowzmacniacz należy zamontować na pionowej, równej powierzchni, zgodnie z poniższym
rysunkiem.
!
OSTRZEŻENIE:
●
Podczas montażu należy zadbać, by do wnętrza serwowzmacniacza nie trafiły
wióry, ścinki przewodów lub inne przewodzące przedmioty.
●
Należy także upewnić się, że wykluczone jest przedostawanie się przez otwory
wentylacyjne szafy wody, a także oleju lub innych palnych substancji.
S000520C
Rys. 2-1: Orientacja i minimalne odstępy przy montażu
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
min.
10 mm
min.
10 mm
min.
70 mm
oben
unten
min.
40 mm
min.
40 mm
Szafa
Szafa
Zalecenia ogólne
Montaż
Serwonapędy MELSERVO MR-J2Super-A
2 - 3
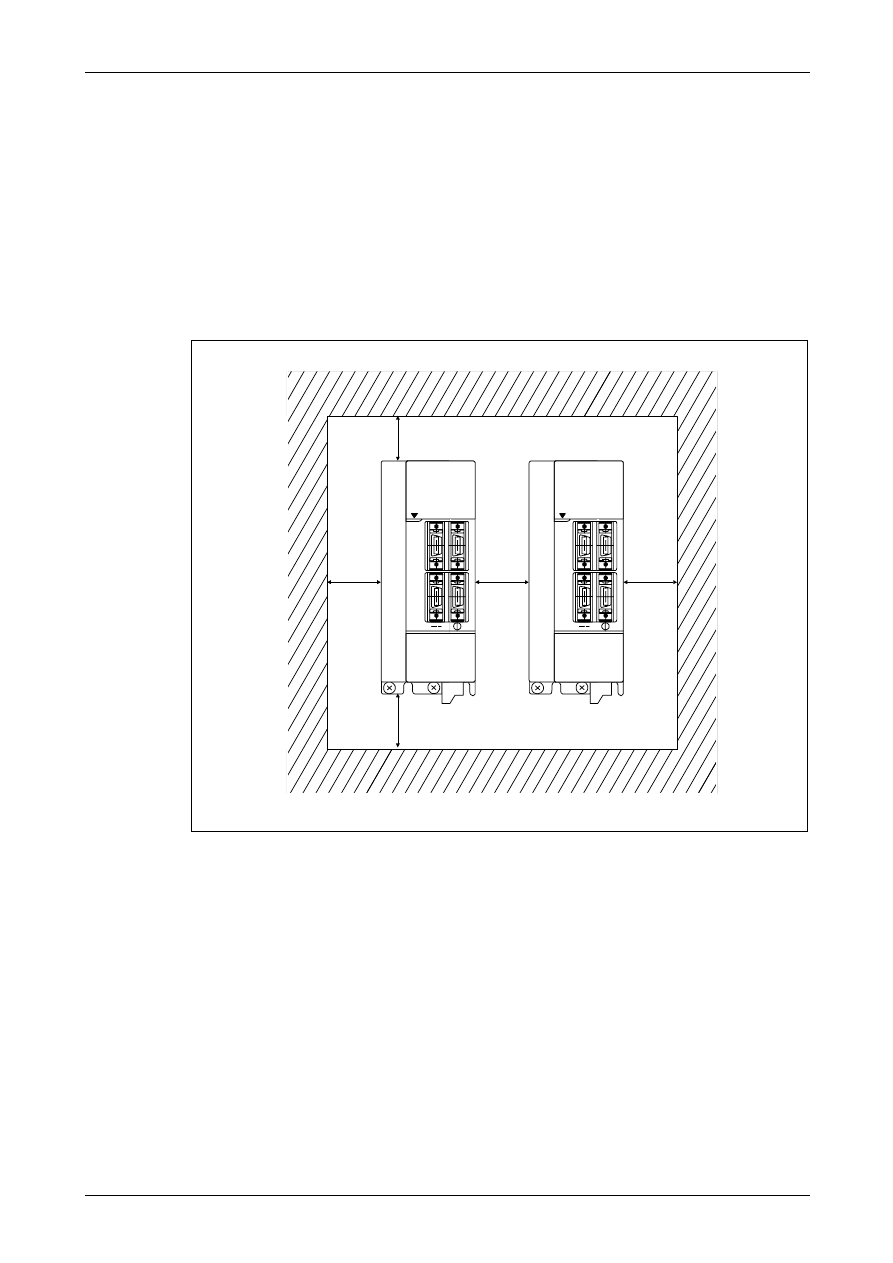
Montaż dwu lub więcej serwowzmacniaczy oraz innego sprzętu
Pomiędzy górną ścianką serwowzmacniacza i wewnętrzną górną powierzchnią szafy należy
pozostawić wystarczająco duży odstęp. Opierając się na łącznej mocy strat wszystkich
urządzeń należy upewnić się, że w żadnych warunkach temperatura wewnątrz szafy nie przek-
roczy +55 °C. Jeżeli jest to konieczne, należy zastosować szafę z wymuszoną wentylacją, przy
czym na drodze przepływu powietrza chłodzącego przez serwowzmacniacz nie mogą znależć
się inne urządzenia wydzielające ciepło lub utrudniające przepływ powietrza.
Bilans cieplny należy wykonać w oparciu o dane dostarczone przez producenta szafy.
Jeżeli w szafie znajdują się urządzenia generujące znaczne ilości ciepła, np. zewnętrzny
opornik hamujący, należy go umieścić na tyle daleko od serwowzmacniacza, by nie powodować
jego nagrzewania.
S000521C
Rys. 2-2: Montaż większej ilości serwowzmacniaczy
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
min.
10 mm
min.
30 mm
min.
30 mm
min.
100 mm
min.
40 mm
Montaż
Zalecenia ogólne
2 - 4
2.1.2 Montaż serwosilników
Wskazówki bezpieczeństwa
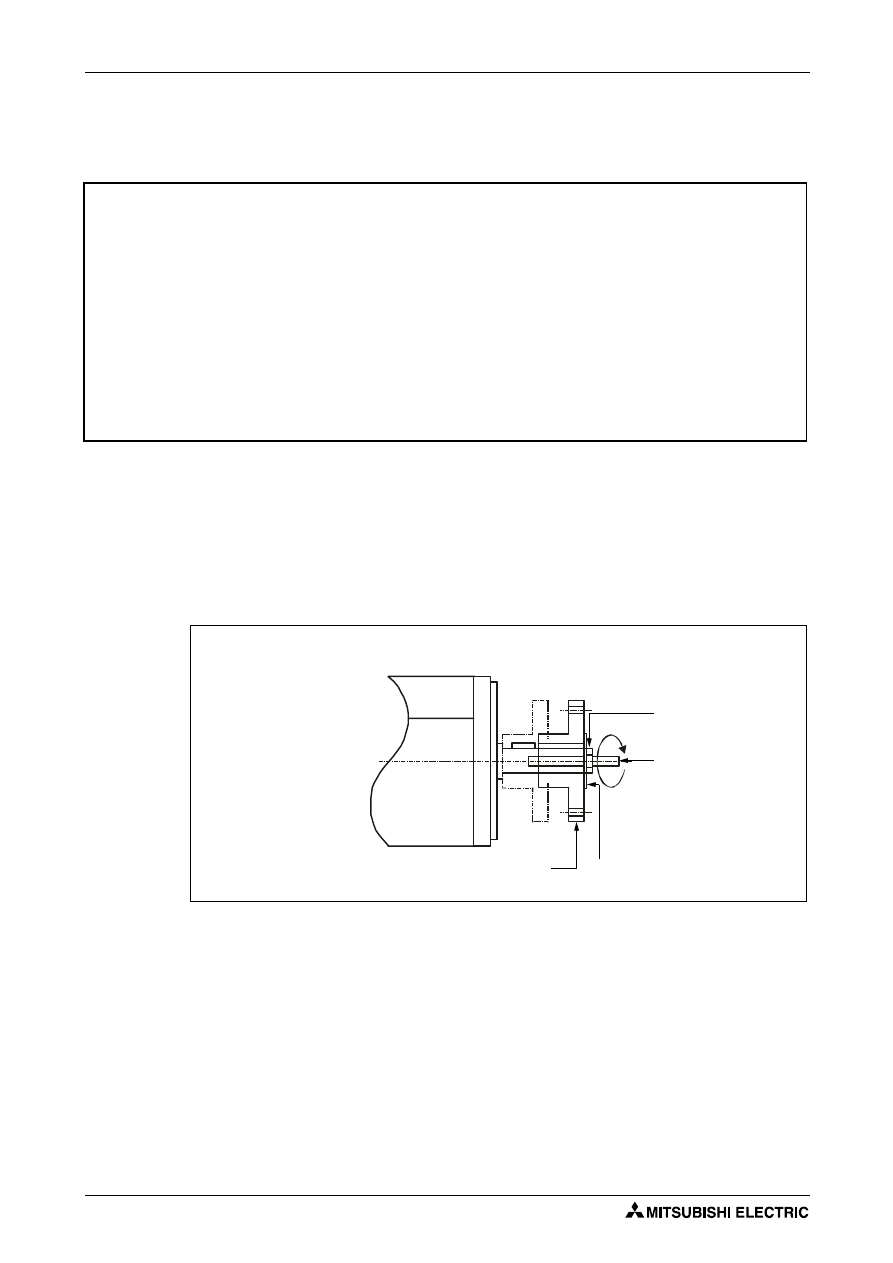
Zabezpieczenie wału
●
Przy montażu koła pasowego na wale z rowkiem klinowym należy wykorzystać nagwinto-
wany otwór w czole wału (patrz Rys. 2-3). W pierwszej kolejności wkręcić śrubę dwustronną
w otwór, nałożyć koło pasowe, nałożyć podkładkę i nakrętkę. Dokręcając nakrętkę docisnąć
koło pasowe na wał do oporu. Niedopuszczalne jest wbijanie koła na wał przy pomocy
młotka itp.
●
Dla serwosilników bez rowka na wale konieczne jest użycie sprzęgła ciernego itp.
●
Przy demontażu koła należy użyć ściągacza lub innych odpowiednich narzędzi, by zapobiec
uszkodzeniu wału, enkodera lub silnika.
●
Orientacja enkodera w serwosilniku nie może być zmieniona.
!
OSTRZEŻENIE:
●
Nie wolno nosić serwosilnika trzymając za kable, wał lub enkoder. Grozi to usz-
kodzeniem serwosilnika.
●
Serwosilnik wymaga solidnego zamocowania w maszynie. Nieodpowiednio zamo-
cowany serwosilnik może podczas pracy ulec obluzowaniu lub wyrwaniu, co grozi
uszkodzeniem maszyny i stwarza zagrożenie dla obsługi.
●
Nie wolno uderzać w silnik ani jego wał, np. podczas montażu w maszynie. Może
to doprowadzić do uszkodzenia enkodera.
●
Dla bezpieczeństwa personelu, wał serwosilnika oraz inne ruchome i wirujące
elementy muszą być osłonięte.
●
Obciążenie wału silnika nie może przekraczać wartości dopuszczalnej, pod groźbą
pęknięcia.
S000522C
Rys. 2-3: Montaż koła pasowego
Serwosilnik
Śruba dwustr.
Nakrętka
Podkładka
Koło pasowe
Zalecenia ogólne
Montaż
Serwonapędy MELSERVO MR-J2Super-A
2 - 5
●
Podczas montażu silnika należy dociągać śruby z odpowiednią siłą oraz stosować podkładki
sprężynowe lub inne zabezpieczenia, by zapobiec obluzowaniu wskutek wibracji.
●
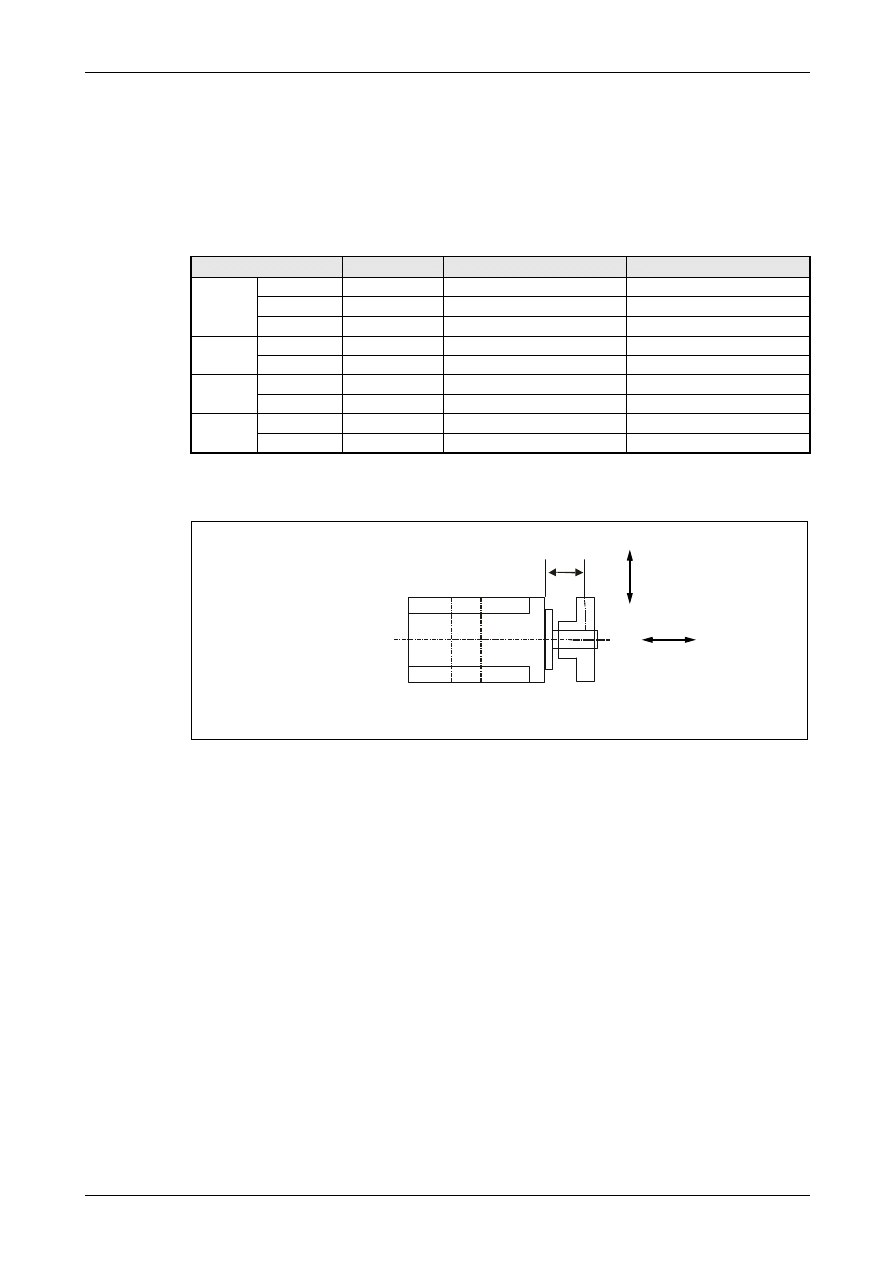
Przy stosowaniu przekładni pasowej lub łańcuchowej, paska rozrządu itp., należy dobrać
średnicę koła tak, by nie przekroczyć dopuszczalnej wartości obciążenia radialnego (patrz
poniższa tabela).
●
Nie należy używać połączeń sztywnych, które mogą wnosić obciążenia zginające i dopro-
wadzić do złamania wału.
Serwosilnik
L [mm]
Siła radialna [N]
Siła poosiowa [N]
HC-MFS
053 / 13
25
88
59
23 / 43
30
245
98
73
40
392
147
HC-KFS
053 / 13
25
88
59
23 / 43
30
245
98
HC-SFS
52 do 152
55
980
490
202 do 702
79
2058
980
HC-RFS
103 do 203
45
686
196
353 / 503
63
980
392
Tab. 2-2: Dopuszczalne wartości sił radialnych i poosiowych na wale serwosilnika
S000523C
Rys. 2-4: Oznaczenia sił
L
Siła radialna
Siła poosiowa
L: Odległość między czołem silnika i środkiem obciążenia
Montaż
Zalecenia ogólne
2 - 6
Odporność na wibracje
Serwosilnik
Dopuszczalne wibracje
HC-KFS
HC-MFS
X, Y: 49 m/s
2
(5 g)
HC-SFS52 bis 152
HC-RFS
X, Y: 24,5 m/s
2
(2,5 g)
(patrz Rys. 2-5)
HC-SFS202, 352
X: 24,5 m/s
2
(2,5 g)
Y: 49 m/s
2
(5 g)
HC-SFS502, 702
X: 24,5 m/s
2
(2,5 g)
Y: 29,4 m/s
2
(3 g)
Tab. 2-3: Odporność serwosilników na wibracje
S000518C
Rys. 2-5: Kierunki wibracji
S000519C
Rys. 2-6: Dopuszczalne wibracje w serwosilniku w zależności od prędkości obrotowej
X
Y
Serwosilnik
3500
3000
2500
2000
1500
1000
500
20
30
40
50
60
80
100
200
Amplituda w
ibr
acji
w kieru
nkach X i Y [
µm]
Prędkość obrotowa [obr./min]
Zalecenia ogólne
Montaż
Serwonapędy MELSERVO MR-J2Super-A
2 - 7
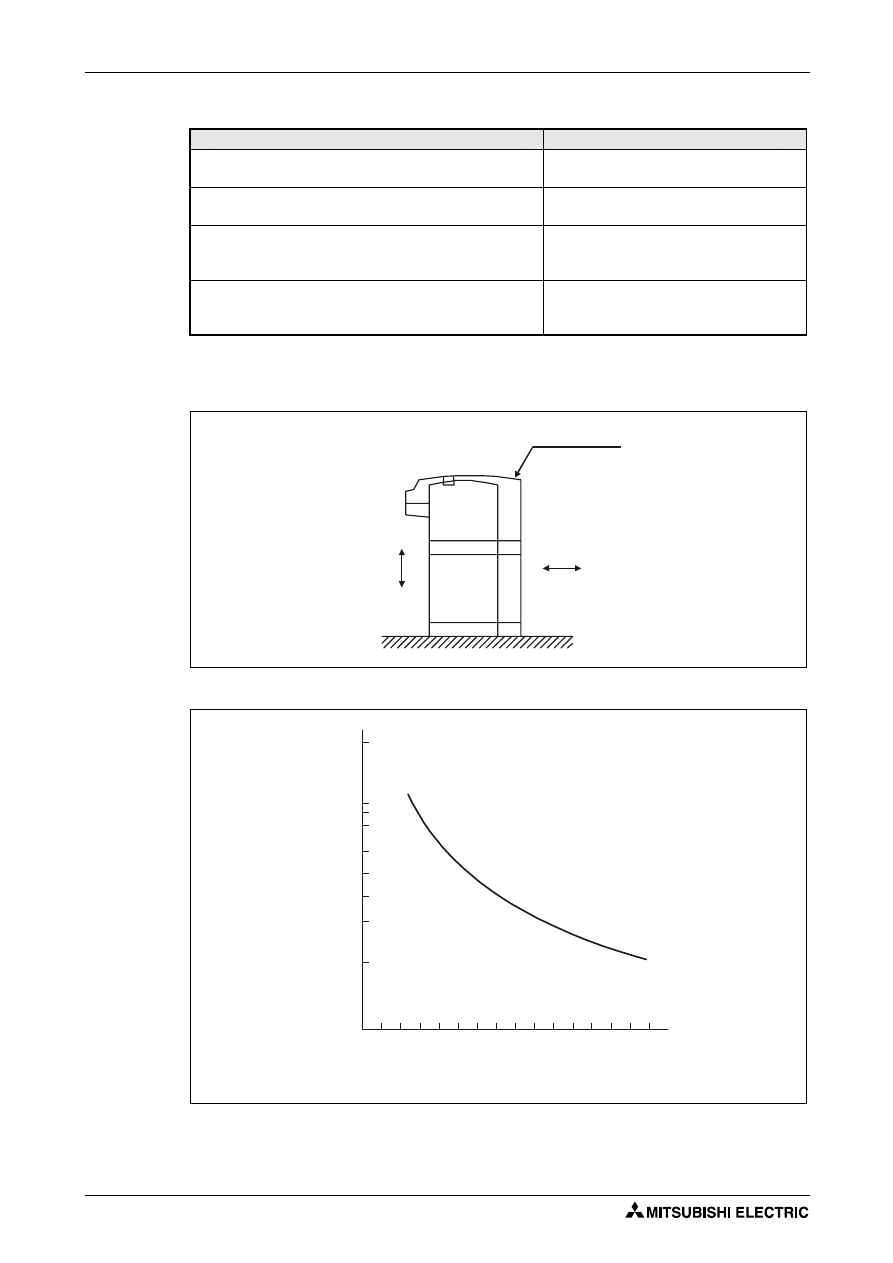
Zabezpieczenie przed wodą i olejem
Przy poziomym montażu serwosilnika z przekładnią poziom oleju w przekładni musi zawsze być
poniżej krawędzi uszczelki wału serwosilnika. W przeciwnym wypadku olej przedostanie się do
wnętrza serwosilnika i spowoduje uszkodzenie. Należy także zapewnić w przekładni otwór
przewietrzający, by nie dopuścić do wzrostu ciśnienia wewnątrz.
W poniższej tabeli podano minimalne odległości między poziomem oleju i środkiem wału ser-
wosilnika zgodnie z powyższym opisem:
Serwosilnik
Wysokość nad poziomem oleju [mm]
HC-SFS
52 do 152
20
202 do 702
25
HC-RFS
103 do 503
20
Tab. 2-4: Minimalny odstęp między poziomem oleju i środkiem wału serwosilnika
S000525C
Rys. 2-7: Ilustracja używanych określeń
!
UWAGA:
Serwosilniki serii HC-MFS i KC-KFS nie są wyposażone w uszczelki olejowe wału. Nie
mogą więc być stosowane z przekładniami w wyżej opisany sposób. Przekładnia musi
posiadać własne uszczelnienie olejowe.
h
Uszczelka
V-Ring
Wysokość nad poziomem oleju
Serwosilnik
Przekładnia
Montaż
Zalecenia ogólne
2 - 8
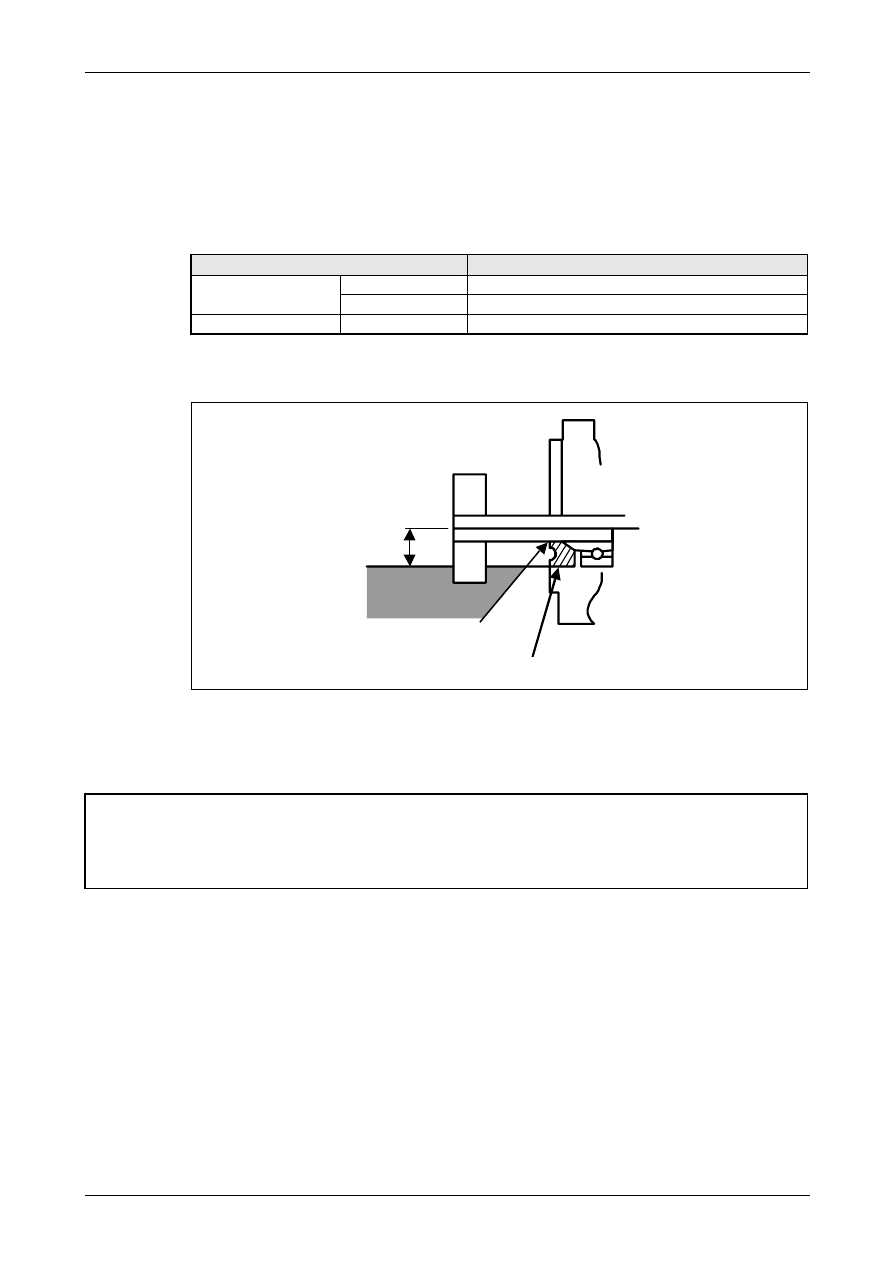
Przy poziomym montażu serwosilnika, należy skierować go wyprowadzeniami enkodera i zasi-
lania w dół. Przy montażu pionowym lub ukośnym należy zapewnić zwis kabli.
Nie należy dopuszczać do tego, by kable serwosilnika były zanurzone w wodzie lub oleju.
Wskutek zjawiska kapilarności olej lub woda mogą przedostać się do serwosilnika.
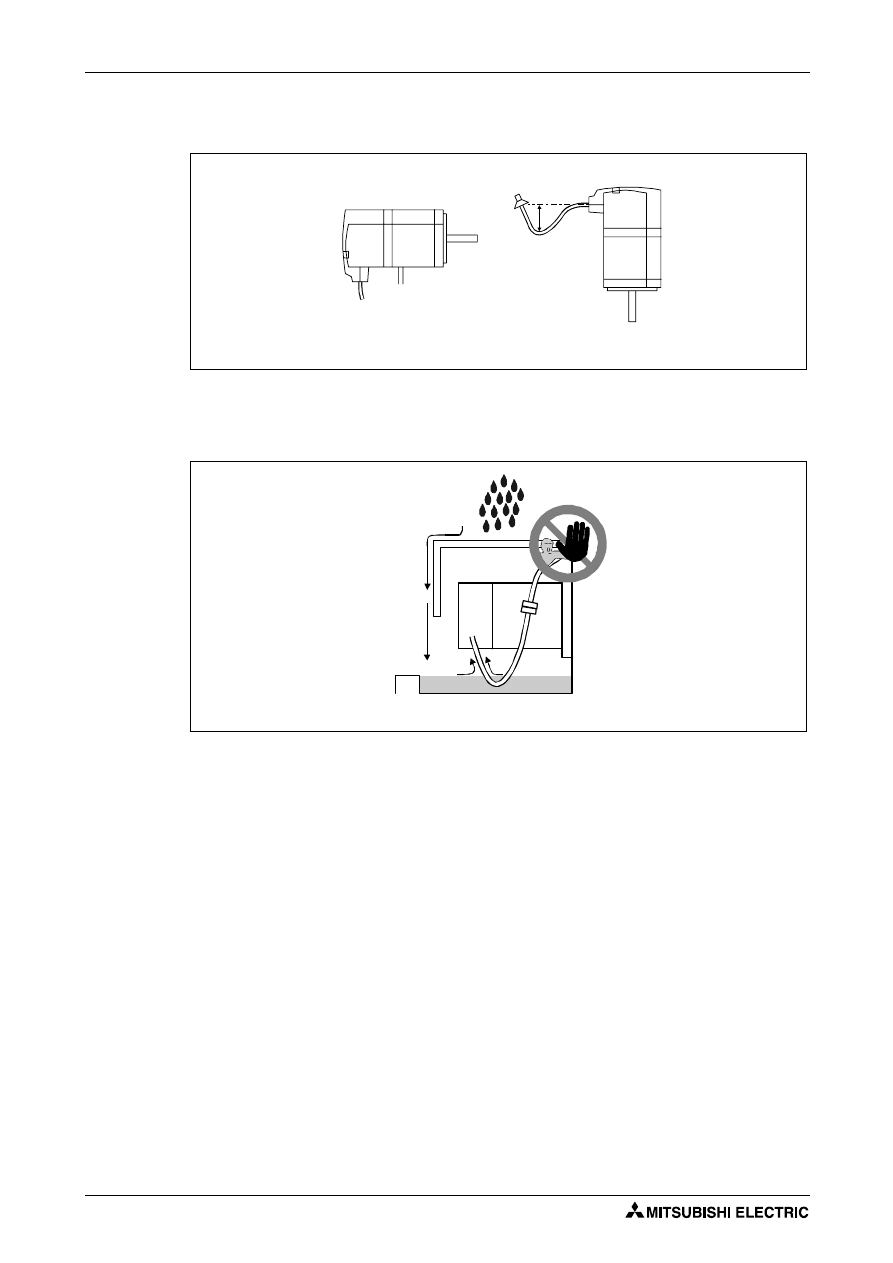
Jeżeli serwosilnik ma być zamontowany z wałem skierowanym w górę, konieczne jest przyjęcie
środków zapobiegających przenikaniu oleju z przekładni itp. do wnętrza serwosilnika.
S000526C
Rys. 2-8: Montaż serwosilnika: poziomo i pionowo ze zwisem kabla
S000527C
Rys. 2-9: Kable nie powinny być zanurzone w cieczy
Zwis kabla
Serwosil-
nik
Olej lub woda
Błąd! Efekt kapilarny!
Szafa
Zalecenia ogólne
Montaż
Serwonapędy MELSERVO MR-J2Super-A
2 - 9
Układanie kabla
Przy układaniu kabli należy zadbać o to, by kable nie były narażone na działanie sił
naprężających. Gdy jest to niemożliwe, należy zapobiegać przenoszeniu się działania tych sił
na złącza kabli.
W przypadkach, gdy serwosilnik przemieszcza się, należy zwrócić uwagę na to, by kabel w sk-
rajnych położeniach nie ulegał naprężeniu. Przy układaniu w szybach lub kanałach kablowych
należy przewidzieć odpowiedni zapas długości kabla zasilającego i enkodera.
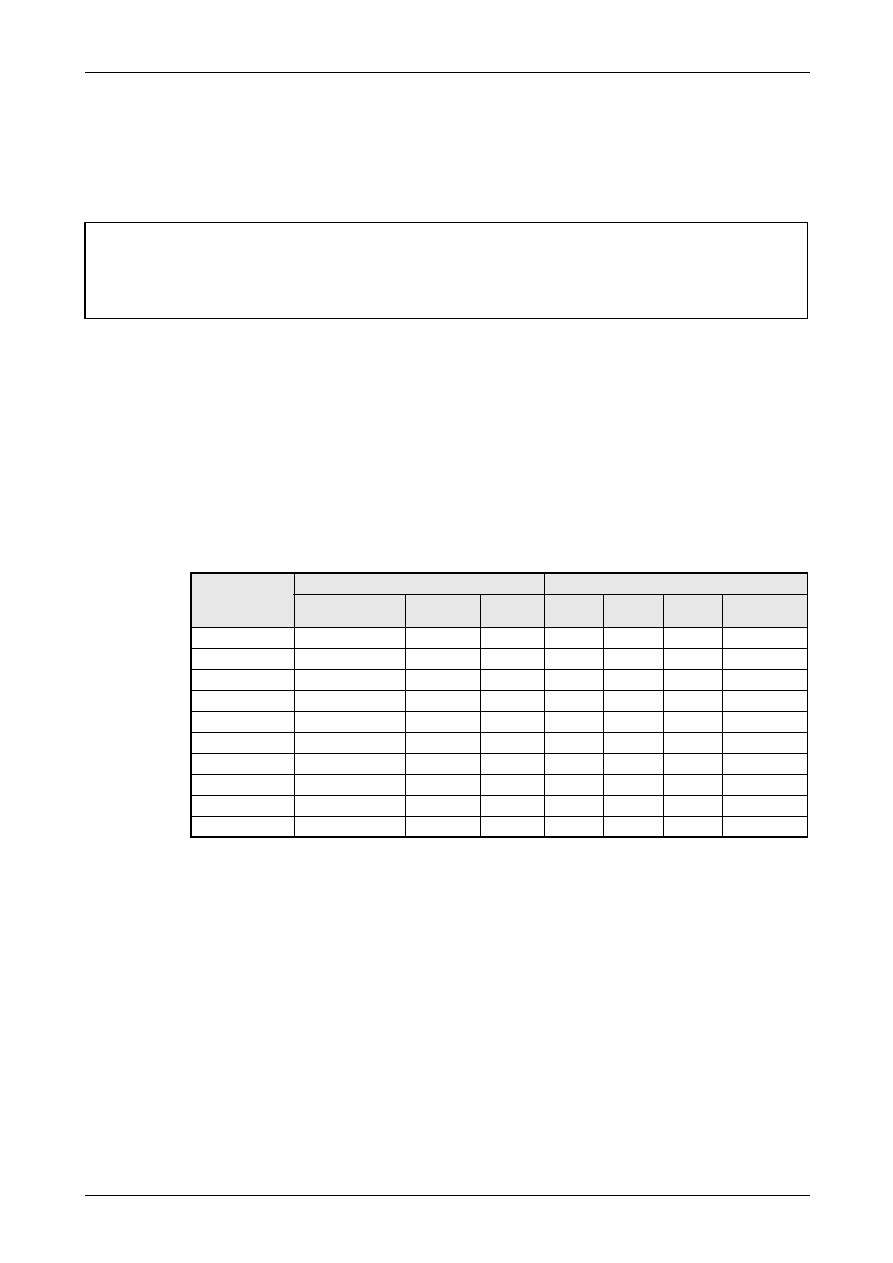
Odporność kabla enkodera na zginanie jest zilustrowana na Rys. 2-11. Czas życia standar-
dowego kabla enkodera MR-JCCBLmM-L jest ograniczony do 5000 zgięć przy promieniu zgięcia
60 mm. W praktyce należy przyjąć dodatkowo odpowiedni współczynnik bezpieczeństwa. W
aplikacjach, w których serwosilnik przemieszcza się, należy zapenić maksymalnie możliwy
promień zginania kabla.
S000528C
Rys. 2-10: Montaż silnika z wałem skierowanym w górę
S000529C
Rys. 2-11: Dopuszczalna ilość zgięć w zależności od promienia
Serwosilnik
Przekładnia
Olej
1 x 10
8
5 x 10
7
1 x 10
7
1 x 10
6
5 x 10
6
1 x 10
5
5 x 10
5
5 x 10
3
1 x 10
3
4
7 10
20
40
70 100
200
1 x 10
4
5 x 10
4
Promień zgięcia
[mm]
Ilo
ść
zgi
ęć
1
Elastyczny kabel enkodera
MR-JCCBLmM-H
MR-JHSCBLmM-H
MR-ENCBLmM-H
2
Standardowy kabel enkodera
MR-JCCBLmM-L
MR-JHSCBLmM-L

Montaż
Zalecenia ogólne
2 - 10
NOTATKI:
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 1
3
Podłączanie
3.1 Podłączanie serwowzmacniacza
3.1.1 Wyłącznik nadprądowy, bezpieczniki, stycznik, przewody połączeniowe
Listwy zaciskowe zasilania i silnika są dostępne po otwarciu klapki w pokrywie czołowej (model
MR-J2S-100A i niższe) lub po zdjęciu pokrywy czołowej (model MR-J2S-200A i wyższe). Zacis-
ki zasilania sieciowego oznakowane są L1, L2 i L3. Dla modeli o mocy do 750 W dopuszczalne
jest zasilanie jednofazowe, poprzez zaciski L1, L2.
Silnik należy podłączać do zacisków U, V, W.
Szczegółowy opis zacisków obwodu mocy zawiera tabela Tab. 3-3 na stronie Str. 3-3
Do podłączania serwowzmacniaczy i serwosilników należy stosować osprzęt i materiały
zgodne z podanymi w poniższej tabeli:
!
OSTRZEŻENIE:
Na zaciski serwowzmacniacza można podawać jedynie odpowiednie dla nich wartości
napięcia. Podanie nieodpowiedniego napięcia może spowodować uszkodzenie ser-
wowzmacniacza.
Model serwo-
wzmacniacza
Zasilanie
Przekrój przewodów [mm
2
]
Wyłącznik
Bezpie-
czniki
Stycznik
L1-L2-L3 L11-L21
U-V-W
Opornik ha-
mujący
MR-J2S-10A
NF30, 5 A
16 A
S-N10
1,5
1,5
1,5
1,5
MR-J2S-20A
NF30, 5 A
16 A
S-N10
1,5
1,5
1,5
1,5
MR-J2S-40A
NF30, 10 A
16 A
S-N10
1,5
1,5
1,5
1,5
MR-J2S-60A
NF30, 15 A
16 A
S-N10
1,5
1,5
1,5
1,5
MR-J2S-70A
NF30, 15 A
16 A
S-N10
1,5
1,5
1,5
1,5
MR-J2S-100A
NF30, 15 A
16 A
S-N10
1,5
1,5
2,5
1,5
MR-J2S-200A
NF30, 20 A
20 A
S-N18
2,5–4
1,5
4
1,5
MR-J2S-350A
NF30, 20 A
25 A
S-N20
4–6
1,5
6
1,5
MR-J2S-500A
NF50, 50 A
50 A
S-N35
4–6
1,5
6
1,5
MR-J2S-700A
NF100, 75 A
50 A
S-N50
10
1,5
10
1,5
Tab. 3-1: Osprzęt sieciowy i przewody obwodu mocy
Podłączanie
Podłączanie serwowzmacniacza
3 - 2
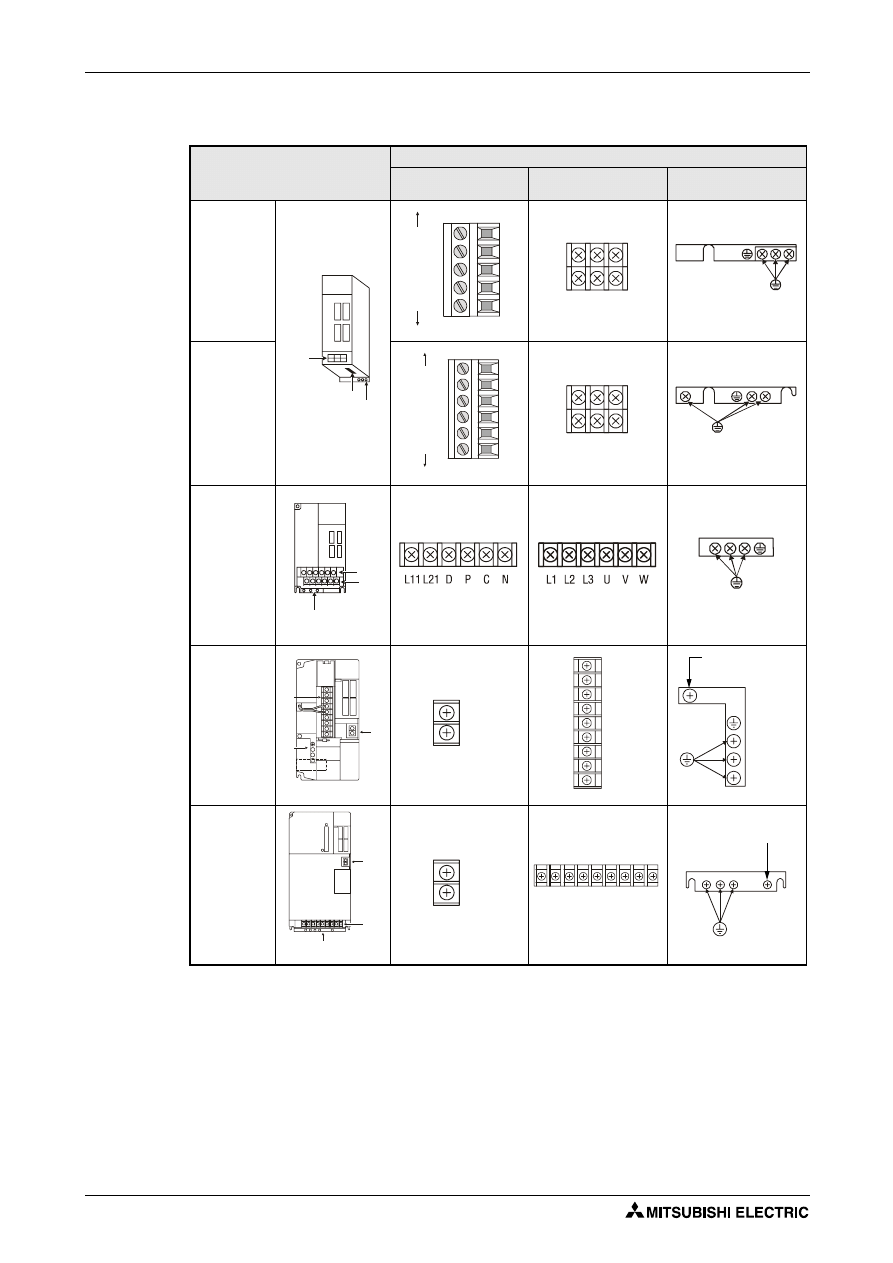
3.1.2 Listwy
zaciskowe
obwodów mocy i sterowania
Serwowzmacniacz
Zaciski
Zasilanie obwodów
sterowania TE2
Obwód-
główny TE1
Uziemienie ochronne
PE
MR-J2S-10A
do
MR-J2S-60A
S000919C
S000532C
S000535C
S000539C
MR-J2S-70A
MR-J2S-100A
S000533C
S000535C
S000540C
MR-J2S-200A
MR-J2S-350A
S000920C
S000534W
S000538W
S000541C
MR-J2S-500A
S000921C
S000924C
S000923C
S000925C
MR-J2S-700A
S000922C
S000924C
S000926C
S000927C
Tab. 3-2: Zaciski
TE1
TE2
PE
L11
L21
P
C
D
Przód
obudowy
Tył
obudowy
L1
U
L2
V
L3
W
L11
N
L21
P
C
D
Przód
obudowy
Tył
obudowy
L1
U
L2
V
L3
W
TE2
TE1
PE
TE1
TE2
PE
L
11
L
12
L
1
L
2
L
3
C
P
N
U
V
W
Wkręt mocujący kabla
wewnętrznego
opornika hamującego
TE1
TE2
PE
L
11
L
12
L
1
L
2
L
3
C P N U V W
Wkręt mocujący kabla
wewnętrznego
opornika hamującego
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 3
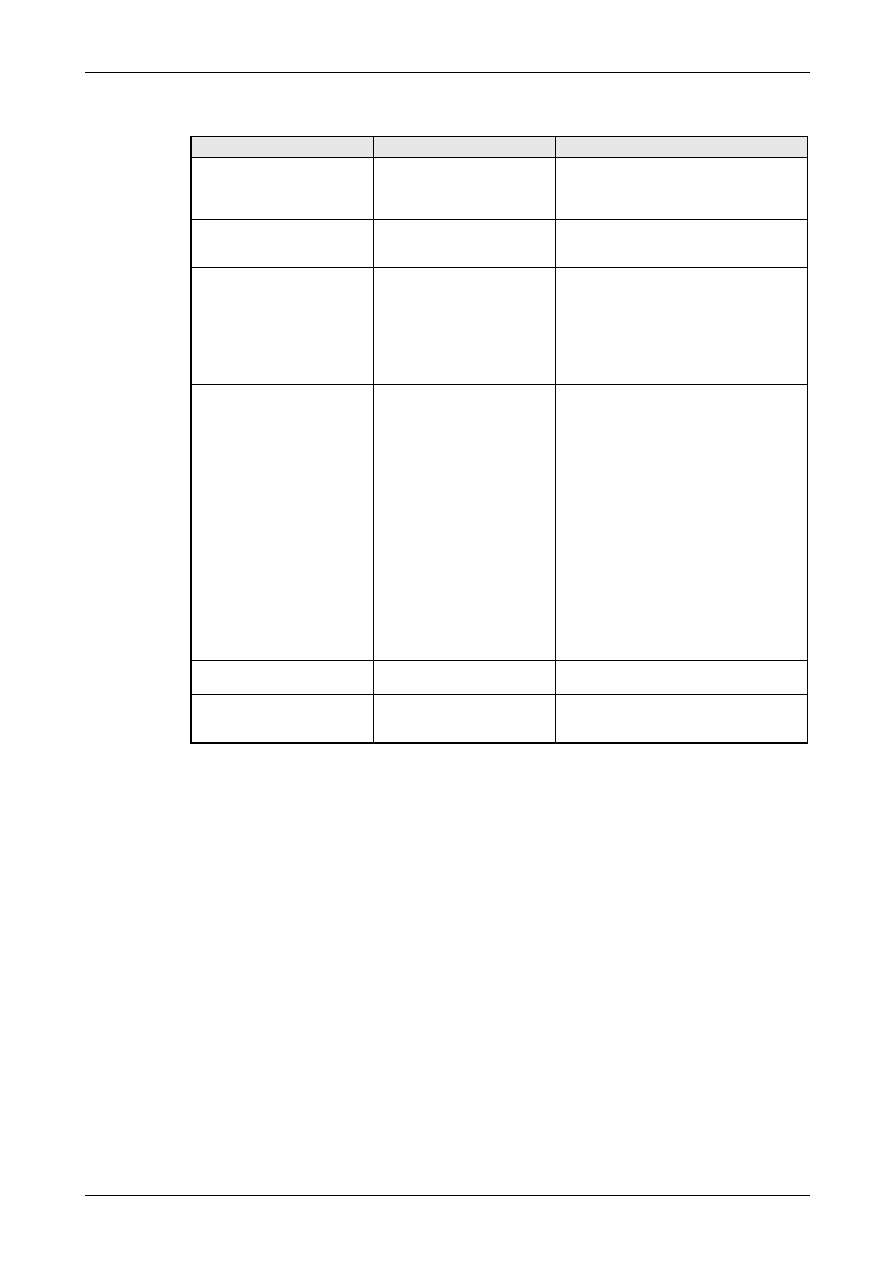
Przegląd zacisków
Symbol
Obwód
Opis
L1, L2, L3
Napięcie zasilania obwodu
głównego
Napięcie trójfazowe o wartości znamionowej
3x 200 do 230 V AC, 50/60 Hz.
Dla wzmacniaczy o mocy do 750 dopusz-
czalne jest zasilanie jednofazowe
L11, L21
Napięcie zasilania obwodów ste-
rowania
Napięcie jednofazowe o wartości znamion-
owej 200 do 230 V AC, 50/60 Hz. Ponadto,
L11 powinno być łączone z L1, a L21 - z L2.
N
Zewnętrzny układ hamowania
Zewnętrzny układ hamowania należy
podłączać do zacisków P i N. Przy podłącza-
niu zewnętrznego układu hamowania należy
bezwzględnie odłączyć od zacisków P, C
wewnętrzny opornik hamujący.
Dla serwowzmacniaczy MR-J2S-350A i
niższych nie stosuje się zewnętrznych
układów hamujących.
P, C, D
Zewnętrzny opornik hamujący
lub układ hamowania
MR-J2S-350A i niższe
Zaciski P-D są fabrycznie zwarte zworą. W
przypadku podłączania zewnętrznego
opornika hamującego należy bezwzględnie
zworę usunąć. Opornik zewnętrzny należy
podłączać do zacisków P-C.
Dla serwowzmacniaczy MR-J2S-350A i
niższych nie stosuje się zewnętrznych
układów hamowania.
MR-J2S-500A i wyższe
Przy podłączaniu zewnętrznego opornika
hamującego lub zewnętrznego układu
hamującego należy bezwzględnie odłączyć
wewnętrzny opornik hamujący od zacisków
P-C.
Zewnętrzny opornik hamujący podłącza się
do zacisków P-C.
Zewnętrzny układ hamowania należy
podłączać do zacisków P i N.
U, V, W
Wyjście serwosilnika
Zaciski należy połączyć z zaciskami zasilania
U, V, W serwosilnika.
PE
Uziemienie ochronne
Zacisk należy połączyć z przewodem uzie-
miającym serwosilnika oraz zaciskiem uzie-
miającym szafy sterowniczej.
Tab. 3-3: Przegląd zacisków
Podłączanie
Podłączanie serwowzmacniacza
3 - 4
3.1.3 Podłączanie obwodów sterowania
Wejścia i wyjścia sterujące serwowzmacniacza są zgrupowane w czterech złączach sy-
gnałowych. Rozkład sygnałów w złączach CN1A i CN1B jest programowalny. Szczegóły
opisano w tabeli Tab. 3-4.
S000861T
Rys. 3-1: Złącza sygnałowe
UWAGA:
Widok rozkładu styków w złączach pokazano na Rys. 3-3 dla wtyków od strony lutowania. .
CN1A
CN3
CN2
CN1B
* Obudowa złącza jest wewnętrznie
połączona z zaciskiem uziemienia
serwowzmacniacza.
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 5
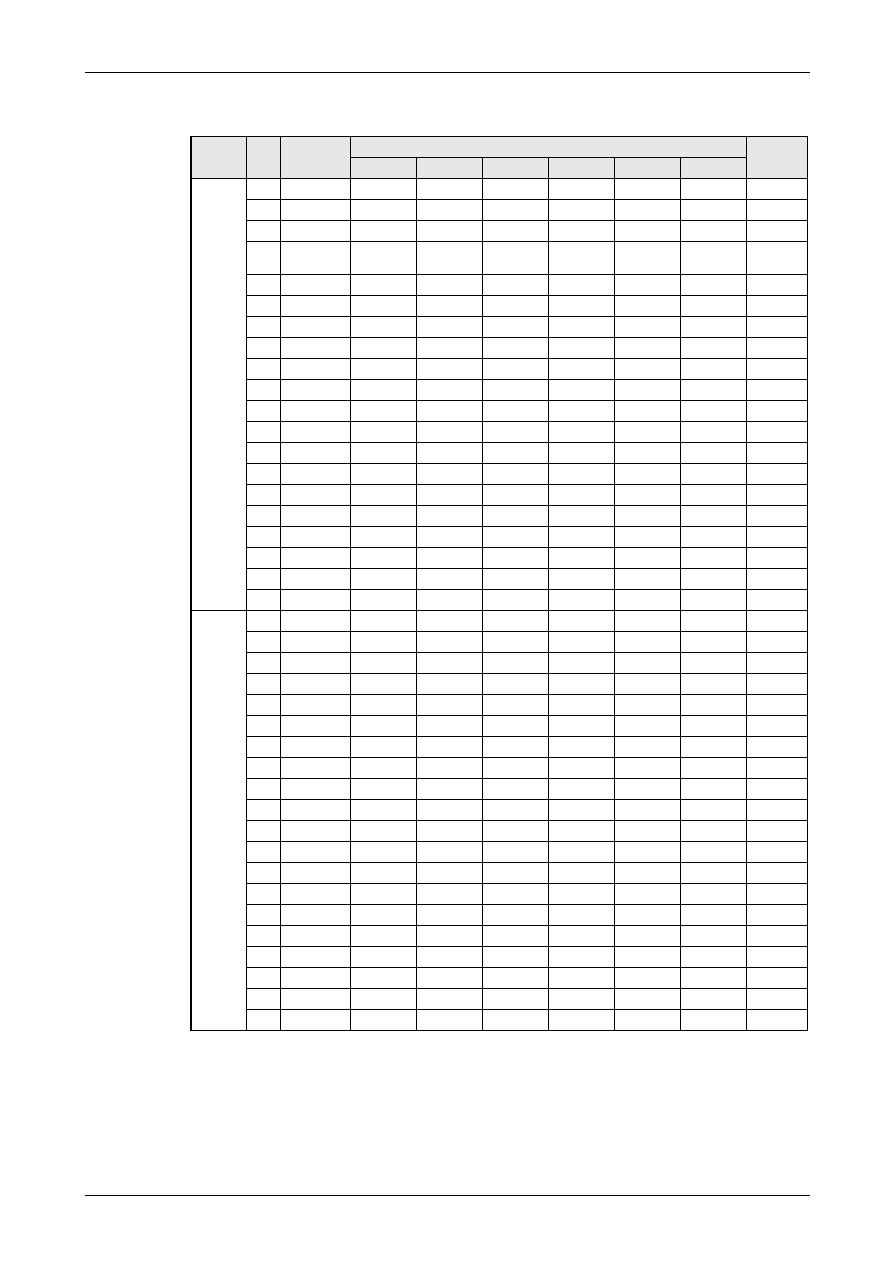
Złącze
Nr
styku
I/O
a
Sygnały we/wy w trybie sterowania
b
Związany
Pr.
P
P/S
S
S/T
T
T/P
CN1A
1
—
LG
LG
LG,
LG
LG
LG
—
2
I
NP
NP/—
—
—
—
—/NP
—
3
I
PP
PP/—
—
—
—
—/PP
—
4
—
P15R
P15R/
P15R
P15R
P15R
P15R
P15R
—
5
O
LZ
LZ
LZ
LZ
LZ
LZ
—
6
O
LA
LA
LA
LA
LA
LA
—
7
O
LB
LB
LB
LB
LB
LB
—
8
I
CR
CR/SP1
SP1
SP1/SP1
SP1
SP1/CR
Pr. 43–48
9
—
COM
COM
COM
COM
COM
COM
—
10
—
SG
SG
SG
SG
SG
SG
—
11
—
OPC
OPC/—
—
—
—
—/OPC
—
12
I
NG
NG/—
—
—
—
—/NG
—
13
I
PG
PG/—
—
—
—
—/PG
—
14
O
OP
OP
OP
OP
OP
OP
—
15
O
LZR
LZR
LZR
LZR
LZR
LZR
—
16
O
LAR
LAR
LAR
LAR
LAR
LAR
—
17
O
LBR
LBR
LBR
LBR
LBR
LBR
—
18
O
INP
INP/SA
SA
SA/—
—
—/INP
Pr. 49
19
O
RD
RD
RD
RD
RD
RD
Pr. 49
20
—
SG
SG
SG
SG
SG
SG
—
CN1B
1
—
LG
LG
LG
LG
LG
LG
—
2
I
—
—/VC
VC
VC/VLA
VLA
VLA/—
—
3
—
VDD
VDD
VDD
VDD
VDD
VDD
—
4
d
O
DO1
DO1
DO1
DO1
DO1
DO1
—
5
I
SON
SON
SON
SON
SON
SON
Pr. 43–48
6
O
TLC
TLC
TLC
TLC/VLC
VLC
VLC/TLC
Pr. 49
7
I
—
LOP
SP2
LOP
SP2
LOP
Pr. 43–48
8
I
PC
PC/ST1
ST1
ST1/RS2
RS2
RS2/PC
Pr. 43–48
9
I
TL
TL/ST2
ST2
ST2/RS1
RS1
RS1/TL
Pr. 43–48
10
—
SG
SG
SG
SG
SG
SG
—
11
—
P15R
P15R
P15R
P15R
P15R
P15R
—
12
I
TLA
TLA/TLA
c
TLA
c
TLA/TC
c
TC
TC/TLA
—
13
—
COM
COM
COM
COM
COM
COM
—
14
I
RES
RES
RES
RES
RES
RES
Pr. 43–48
15
I
EMG
EMG
EMG
EMG
EMG
EMG
—
16
I
LSP
LSP
LSP
LSP/—
—
—/LSP
—
17
I
LSN
LSN
LSN
LSN/—
—
—/LSN
—
18
O
ALM
ALM
ALM
ALM
ALM
ALM
Pr. 49
19
O
ZSP
ZSP
ZSP
ZSP
ZSP
ZSP
Pr. 1, 49
20
—
SG
SG
SG
SG
SG
SG
—
Tab. 3-4: Rozkład sygnałów w złączach CN1A i CN1B
Podłączanie
Podłączanie serwowzmacniacza
3 - 6
a
I
: Sygnał wejściowy
O
: Sygnał wyjściowy
b
P
: Regulacja położenia (pozycjonowanie)
S
: Regulacja prędkości
T
: Regulacja momentu
P/S : Tryb przełączania między regulacją położenia i prędkości
S/T : Tryb przełączania między regulacją prędkości i momentu
T/P : Tryb przełączania między regulacją momentu i położenia
c
Jeżeli jeden z parametrów 43 do 48 ustawiony jest tak, by udostępniony był sygnał TL,
umożliwia to zarazem użycie TLA.
d
Sygnał CN1A-18 jest wydawany zawsze.
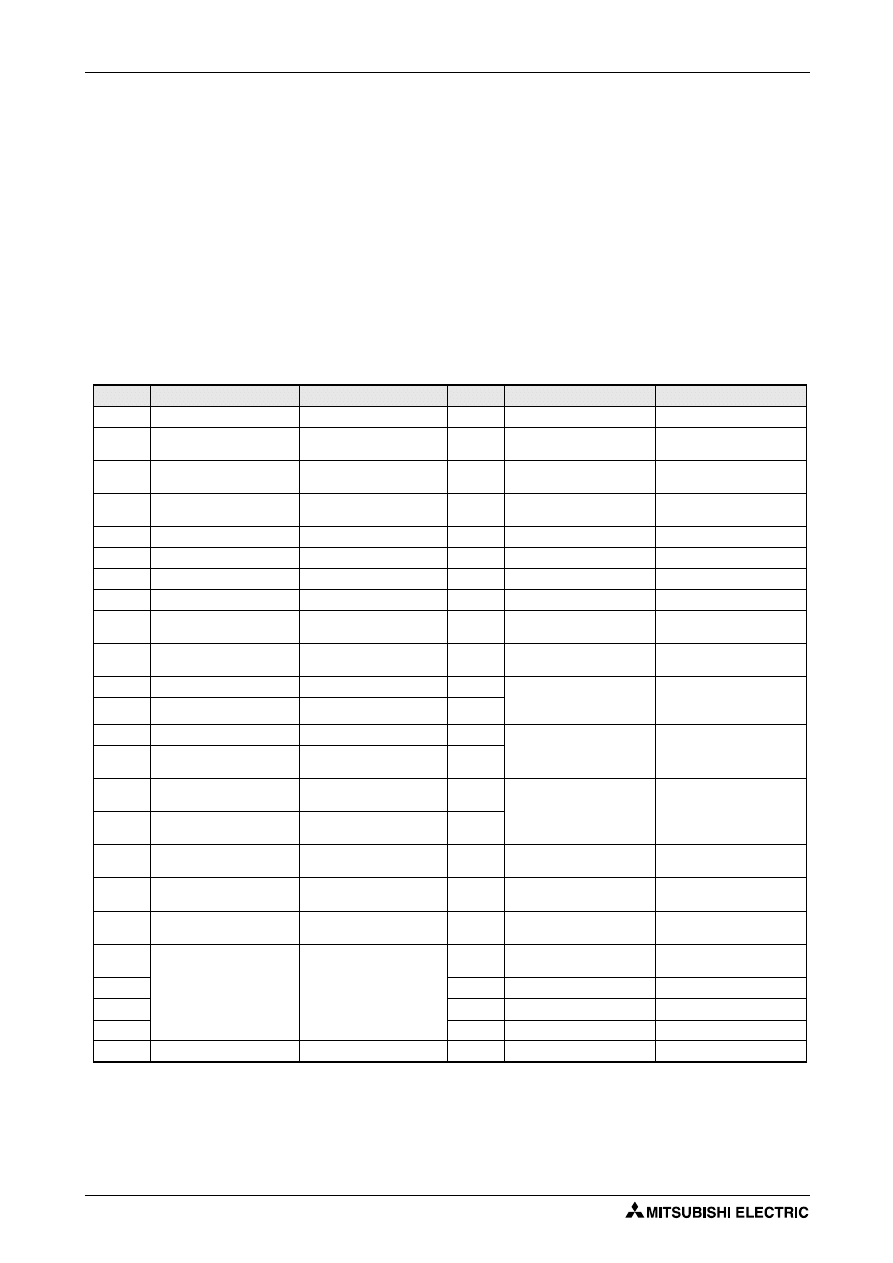
Objaśnienie symboli sygnałów:
Symbol
Opis (angielski)
Opis (polski)
Symbol
Opis (angielski)
Opis (polski)
SON
Servo-ON
Servo ON
VLC
Limiting speed
Ograniczenie prędkości
LSP
Forward rotation stroke
end
Wyłącznik krańcowy
obrotów w prawo
RD
Ready
Gotowość
LSN
Reverse rotation stroke
end
Wyłącznik krańcowy
obrotów w lewo
ZSP
Zero speed
Prędkość zero
CR
Clear
Kasowanie licznika
INP
In position
Pozycjonowanie wyko-
nane
SP1
Speed selection 1
Wybór prędkości 1
SA
Speed reached
Prędkość osiągnięta
SP2
Speed selection 2
Wybór prędkości 2
ALM
Trouble
Alarm
PC
Proportion control
Regulacja proporcjonalna WNG
Warning
Ostrzeżenie
ST1
Forward rotation start
Start w prawo
BWNG
Battery warning
Ostrzeżenie baterii
ST2
Reverse rotation start
Start w lewo
OP
Encoder Z-phase pulse
(open collector)
Impulsy fazy Z enkodera
(otwarty kolektor)
TL
Torque limit selection
Wybór ograniczenia
momentu
MBR
Electromagnetic brake
interlock
Blokada hamulca
elektromagnetycznego
RES
Reset
Reset
LZ
Encoder Z-phase pulse
(differential line driver)
Impulsy fazy Z enkodera
(sterownik linii różnicowej)
EMG
Forced stop
Stop awaryjny
LZR
LOP
Control change
Zmiana sterowania
LA
Encoder A-phase pulse
(differential line driver)
Impulsy fazy A enkodera
(sterownik linii różnicowej)
VC
Analog speed command
Analogowy sygnał
zadawania prędkości
LAR
VLA
Analog speed limit
Analogowe ograniczenie
prędkości
LB
Encoder A-phase pulse
(differential line driver)
Impulsy fazy B enkodera
(sterownik linii różnicowej)
TLA
Analog torque limit
Analogowe ograniczenie
momentu
LBR
TC
Analog torque command
Analogowe zadawanie
momentu
VDD
I/F internal power supply
Wewnętrzny zasilacz
interfejsu
RS1
Forward rotation selection Wybór obrotów w prawo
COM
Digital I/F power supply
input
Zacisk zasilania interfej-
su cyfrowego
RS2
Reverse rotation
selection
Wybór obrotów w lewo
OPC
Open collector power
Zacisk zasilania otwartego
kolektora
PP
Forward/reverse rota-
tion pulse train
Ciąg impulsów zadawa-
nia obrotów w prawo/ w
lewo
SG
Digital I/F common
Zacisk masy interfejsu
cyfrowego
NP
P15R
15VDC power supply
Zasilacz 15VDC
PG
LG
Control common
Zacisk masy sterowania
NG
SD
Shield
Ekran
TLC
Limiting torque
Ograniczenie momentu
—
—
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 7
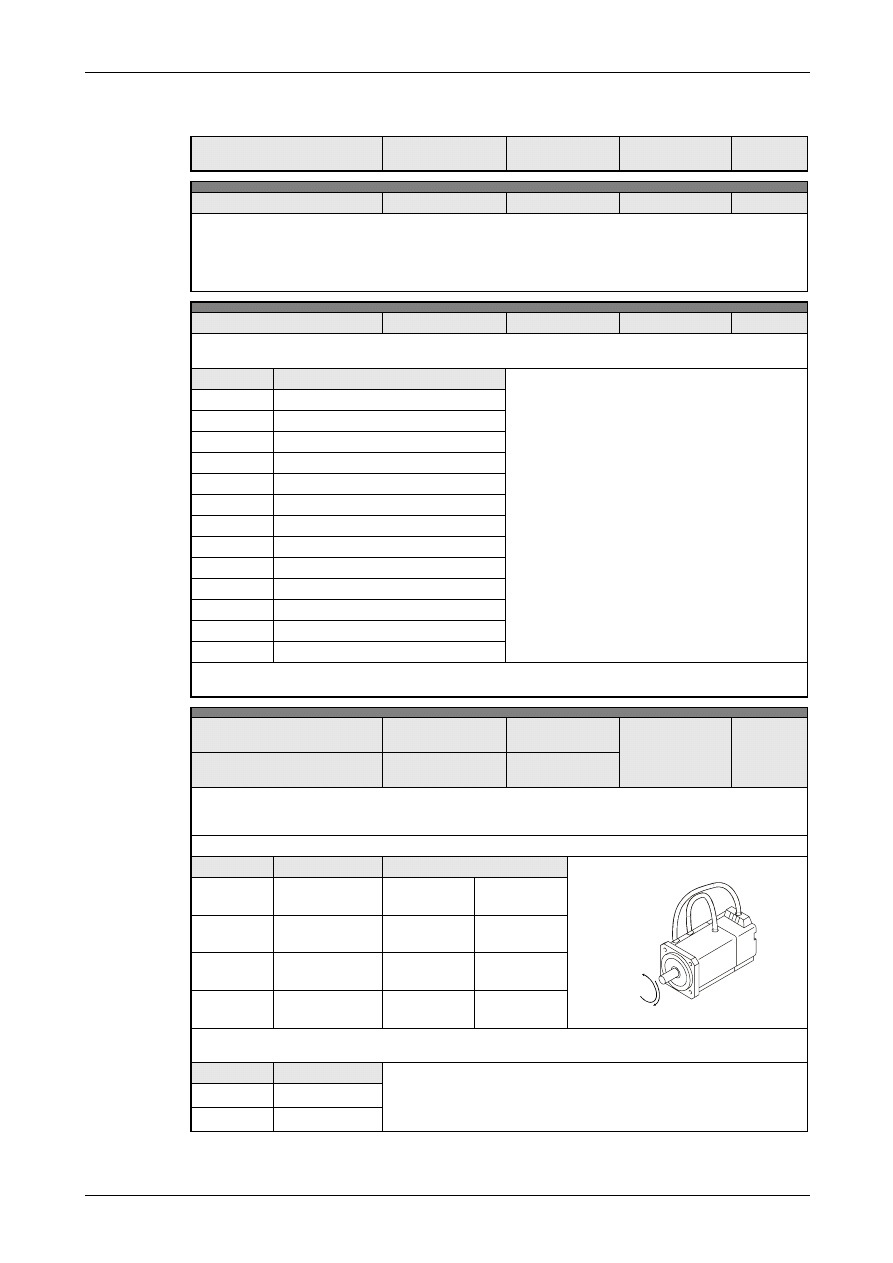
Opis sygnałów wejściowych
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Servo ON
SON
CN1B-5
DI-1
P S T
Zwarcie zacisków SON-SG powoduje załączenie obwodów bazowych i wprowadza serwowzmacniacz w stan goto-
wości (servo-on). Rozwarcie SON-SG powoduje odcięcie wyjście obwodu mocy i hamowanie serwosilnika wybie-
giem (servo-off).
Wprowadzenie wartości "XXX 1" w parametrze Nr 41 powoduje, że sygnał ten jest podawany automatycznie
(zaciski SON-SG stale zwarte).
Reset
RES
CN1B-14
DI-1
P S T
Rozwarcie zacisków RES-SG na czas ponad 50ms resetuje alarm. Poniżej podane alarmy nie są kasowane
sygnałem resetu
Komunikat
Błąd
AL.12
Błąd pamięci 1
AL.13
Błąd zegara
AL.15
Błąd pamięci 2
AL.16
Błąd enkodera1
AL.17
Błąd płyty głównej 2
AL.19
Błąd pamięci 3
AL.1A
Niewłaściwy serwosilnik
AL.20
Błąd enkodera 2
AL.24
Zwarcie doziemne
AL.25
Utrata wartości pozycji absolutnej
AL.33
Przepięcie
AL.37
Błąd parametru
8888
Watchdog
Rozwarcie zacisków RES-SG w stanie bez alarmu odcina wyjście obwodu mocy. Aby nie miało to miejsca, należy
ustawić " X 1 XX " w parametrze Nr 51.
Wyłącznik krańcowy dla
obrotów w prawo
LSP
CN1B-16
DI-1
P S
Wyłącznik krańcowy dla
obrotów w lewo
LSN
CN1B-17
Aby umożliwić pracę silnika, należy zewrzeć zaciski LSP-SG i/lub LSN-SG. Ich rozwarcie powoduje natychmias-
towe zatrzymanie silnika i utrzymywanie go w stanie servo-lock. Ustawienie w parametrze Nr 22 wartości "XXX 1"
powoduje zamiast natychmiastowego zatrzymania hamowanie silnika zgodnie z zadanym czasem hamowania
Wpływ stanów sygnałów na pracę napędu przedstawiono poniżej:
LSP
LSN
Praca (kierunek obrotów)
S000544C
ON
ON
obroty w prawo obroty w lewo
OFF
ON
—
obroty w lewo
ON
OFF
obroty w prawo —
OFF
OFF
—
—
Wprowadzenie wartości "XX 1 X" w parametrze Nr 41 powoduje automatyczne, stałe podawanie sygnału LSP, a
wartości "X 1 XX" - sygnału LSN.
Parametr 41
Stale ON
XX 1 X
LSP
X 1 XX
LSN
obroty w prawo
obroty w lewo
Podłączanie
Podłączanie serwowzmacniacza
3 - 8
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Wybór ograniczenia mo-
mentu
TL, TL1
CN1B-9
DI-1
P S
Ograniczenie momentu 1:
Przy załączonym sygnale TL1 aktywne będzie wewnętrzne ograniczenie momentu, zadane parametrem Pr. 76,
pod warunkiem, że wartość Pr. 76 jest niższa, niż Pr. 28. W przeciwnym wypadku aktywne będzie ograniczenie
określone Pr. 28.
Ograniczenie momentu 2:
Podanie sygnału TL aktywizuje analogowe ograniczenie momentu (TLA), przy czym wartość wewnętrznego ograni-
czenia momentu (parametr Pr. 28 lub parametr Pr.76, jak wyżej) określa maksymalną wartość momentu.
UWAGA:
Sygnały wejściowe należy przypisać do odpowiednich zacisków przy pomocy parametrów Pr. 43–48.
Start obrotów w prawo
ST1
CN1B-8
DI-1
S
Start obrotów w lewo
ST2
CN1B-9
Sygnały służą do uruchomienia serwosilnika w wybranym kierunku:
ST1
ST2
Kierunek obrotów
serwosilnika
OFF
OFF
Stop (servo-lock)
ON
OFF
Obroty w prawo
OFF
ON
Obroty w lewo
ON
ON
Stop (servo-lock)
Jeżeli podczas pracy zostaną jednocześnie podane obydwa sygnały ST1 i ST2, serwosilnik zostanie
wyhamowany do zatrzymania zgodnie z ustawieniem parametru Nr 12 i zablokowany przez servo-lock.
Wybór obrotów w prawo
(regulacja momentu)
RS1
CN1B-9
DI-1
T
Wybór obrotów w lewo
(regulacja momentu)
RS 2
CN1B-8
Sygnały służą do wyboru kierunku generowania momentu obrotowego serwosilnika:
RS1
RS2
Kierunek momentu
obrotowego
Kierunek obrotów
OFF
OFF
Moment nie jest gen-
erowany
Stop
ON
OFF
W prawo w trybie silni-
kowym (napędzania) /
w lewo w trybie
prądnicowym
(hamowania)
W prawo
OFF
ON
W lewo w trybie
silnikowym
(napędzania) / w
prawo w trybie
prądnicowym
(hamowania)
W lewo
ON
ON
Moment nie jest ge-
nerowany
Stop
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 9
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Wybór prędkości 1
SP1
CN1A-8
DI-1
S T
Wybór prędkości 2
SP2
CN1B-7
Wybór prędkości 3
SP3
Wybór jednej z zaprogramowanych prędkości serwosilnika (Tryb regulacji prędkości).
Uwaga: Sygnał SP3 należy przypisać do wybranego zacisku wejściowego przez ustawienie jednego z Pr. 43 do 48.
Wartość
Pr. 43–48
SP1
SP2
SP3
Zadawanie prędkości
SP3 nie jest
używany
(ustawienie
fabryczne)
OFF
OFF
—
Analogowe zadawanie prędkości (VC)
ON
OFF
—
Prędkość zaprogramowana 1 (Pr. 8)
OFF
ON
—
Prędkość zaprogramowana 2 (Pr. 9)
ON
ON
—
Prędkość zaprogramowana 3 (Pr. 10)
SP3 jest
używany
OFF
OFF
OFF
Analogowe zadawanie prędkości (VC)
ON
OFF
OFF
Prędkość zaprogramowana 1 (Pr. 8)
OFF
ON
OFF
Prędkość zaprogramowana 2 (Pr. 9)
ON
ON
OFF
Prędkość zaprogramowana 3 (Pr. 10)
OFF
OFF
ON
Prędkość zaprogramowana 4 (Pr. 72)
ON
OFF
ON
Prędkość zaprogramowana 5 (Pr. 73)
OFF
ON
ON
Prędkość zaprogramowana 6 (Pr. 74)
ON
ON
ON
Prędkość zaprogramowana 7 (Pr. 75)
Wybór wartości ograniczenia prędkości (Tryb regulacji momentu).
Uwaga: Sygnał SP3 należy przypisać do wybranego zacisku wejściowego przez ustawienie jednego z Pr. 43 do 48.
Wartość
Pr. 43–48
SP1
SP2
SP3
Zadawanie wartości ograniczenia prędkości
SP3 nie jest
używany
(ustawienie
fabryczne)
OFF
OFF
—
Analogowe ograniczenie prędkości (VLA)
ON
OFF
—
Prędkość zaprogramowana 1 (Pr. 8)
OFF
ON
—
Prędkość zaprogramowana 2 (Pr. 9)
ON
ON
—
Prędkość zaprogramowana 3 (Pr. 10)
SP3 jest
używany
OFF
OFF
OFF
Analogowe ograniczenie prędkości (VLA)
ON
OFF
OFF
Prędkość zaprogramowana 1 (Pr. 8)
OFF
ON
OFF
Prędkość zaprogramowana 2 (Pr. 9)
ON
ON
OFF
Prędkość zaprogramowana 3 (Pr. 10)
OFF
OFF
ON
Prędkość zaprogramowana 4 (Pr. 72)
ON
OFF
ON
Prędkość zaprogramowana 5 (Pr. 73)
OFF
ON
ON
Prędkość zaprogramowana 6 (Pr. 74)
ON
ON
ON
Prędkość zaprogramowana 7 (Pr. 75)
Regulacja proporcjonalna
PC
CN1B-8
DI-1
P S
Zwarcie zacisków PC-SG powoduje przejście od regulacji proporcjonalno-całkującej (PI) do proporcjonalnej (P).
Jeżeli zatrzymany serwosilnik zostanie przez czynniki zewnętrzne obrócony choćby o jeden impuls, generowany
jest moment napędowy w celu skompensowania przesunięcia. Jeżeli wał silnika jest po zatrzymaniu blokowany
mechanicznie, podanie sygnału PC ogranicza generowanie zbędnego momentu.
Jeżeli wał silnika jest blokowany na dłuższy czas, podaj jednocześnie sygnał PC i sygnał ograniczenia momentu
(TL), by generowany był moment niższy niż zadany analogowym sygnałem ograniczenia momentu.
Uwaga: Użycie sygnału PC w trybie regulacji prędkości wymaga odpowiedniego ustawienia jednego z Pr. 43–48.
Zatrzymanie awaryjne
EMG
CN1B-15
DI-1
P S T
Rozwarcie zacisków EMG-SG powoduje zatrzymanie awaryjne serwonapędu i włączenie hamulca dynamicznego.
Ponowne zwarcie zacisków EMG-SG powoduje wyjście ze stanu zatrzymania awaryjnego.
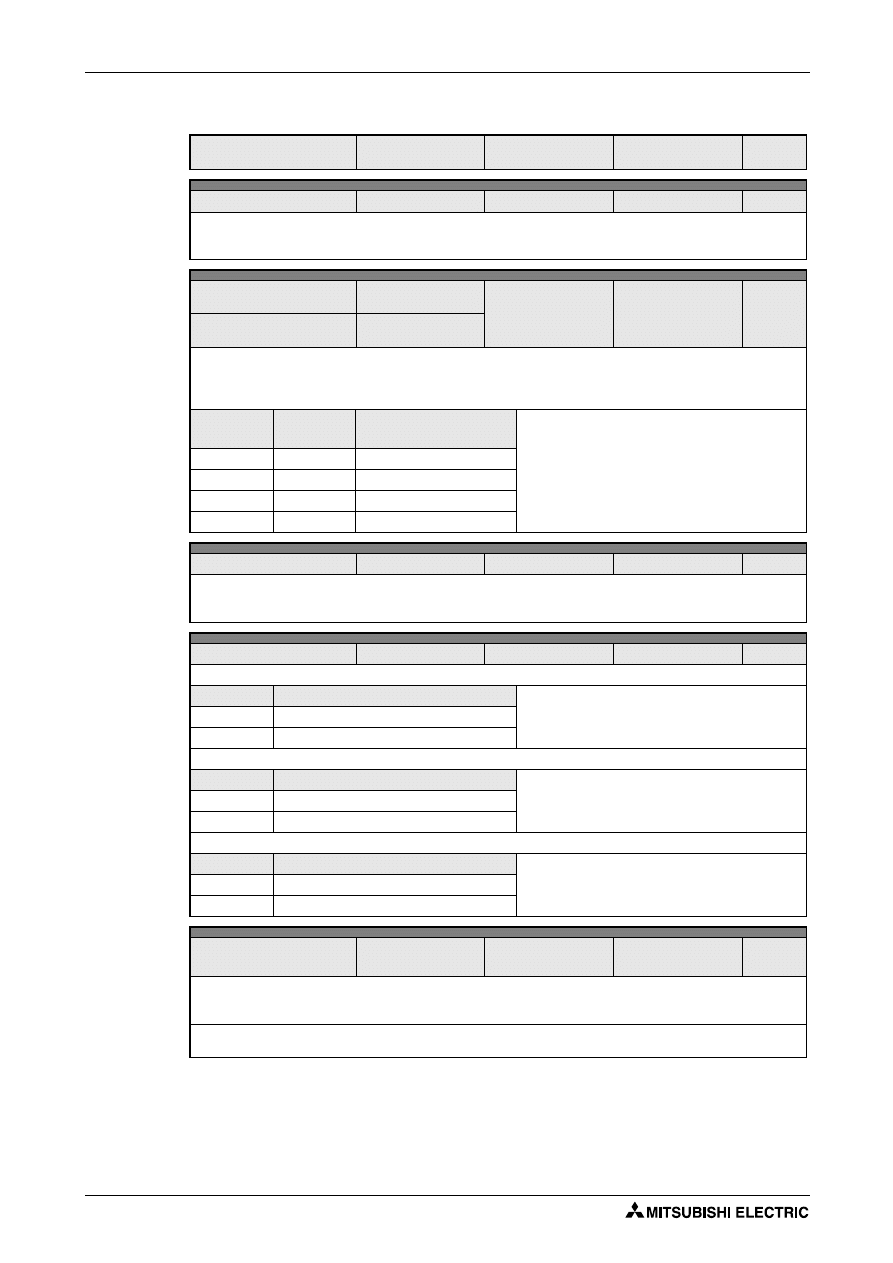
Podłączanie
Podłączanie serwowzmacniacza
3 - 10
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Kasowanie licznika
CR
CN1A-8
DI-1
P
Zwarcie zacisków CR-SG kasuje (w chwili podania sygnału) licznik impulsów uchybu regulatora pozycji. Sygnał
musi być nie krótszy, niż 10ms.
Gdy Pr. 42 ma wartość XX 1 X, impulsy uchybu są przy zwartych zaciskach CR-SG kasowane stale.
Wybór przekładni
elektronicznej 1
CM1
—
DI-1
P
Wybór przekładni
elektronicznej 2
CM2
Aby używać sygnałów CM1 i CM2, należy przypisać je do zacisków wejściowych przez odpowiednie ustawienie
Pr. 43 do 48. Kombinacja sygnałów CM1-SG i CM2-SG pozwala wybrać jedną z czterech wartości licznika
przekładni elektronicznej, zadanych parametrami. CM1 i CM2 nie mogą być użytkowane w absolutnym systemie
pozycjonowania.
CM1
CM2
Parametry przekładni
elektronicznej
OFF
OFF
Pr. 3 (CMX)
ON
OFF
Pr. 69 (CMX2)
OFF
ON
Pr. 70 (CMX3)
ON
ON
Pr. 71 (CMX4)
Zmiana wzmocnienia
CDP
—
DI-1
P S T
Aby używać sygnału CDP, należy przypisać go do zacisku wejściowego przez odpowiednie ustawienie jednego z
Pr. 43 do 48. Zwarcie zacisków CDP-SG zmienia wartość współczynnika momentu bezwładności na ustawioną w
Pr. 61 i wartości wzmocnienia na przemnożone przez wartości Pr. 62 do 64.
Zmiana trybu sterowania
LOP
CN1B-7
DI-1
Tryb przełączany między pozycjonowaniem i regulacją prędkości
LOP
Tryb sterowania
OFF
Pozycjonowanie
ON
Regulacja prędkości
Tryb przełączany między regulacją prędkości i momentu
LOP
Tryb sterowania
OFF
Regulacja prędkości
ON
Regulacja momentu
Tryb przełączany między regulacją momentu i pozycjonowaniem:
LOP
Tryb sterowania
OFF
Regulacja momentu
ON
Pozycjonowanie
Analogowe ograniczenie
momentu
TLA
CN1B-12
Wejście analogowe
P S
Gdy sygnał analogowego ograniczenia momentu (TLA) jest aktywny, wartość generowanego momentu jest
ograniczana przez podanie napięcia 0 do +10VDC na zaciski TLA-LG, biegun dodatni należy łączyć z TLA.
Najwyższy moment generowany jest przy napięciu +10V. Rozdzielczość wejścia: 10 bit.
Uwaga: Aby w trybie regulacji prędkości używać sygnału TLA, należy przypisać sygnał TL do zacisku wejściowego
przez odpowiednie ustawienie jednego z Pr. 43 do 48.
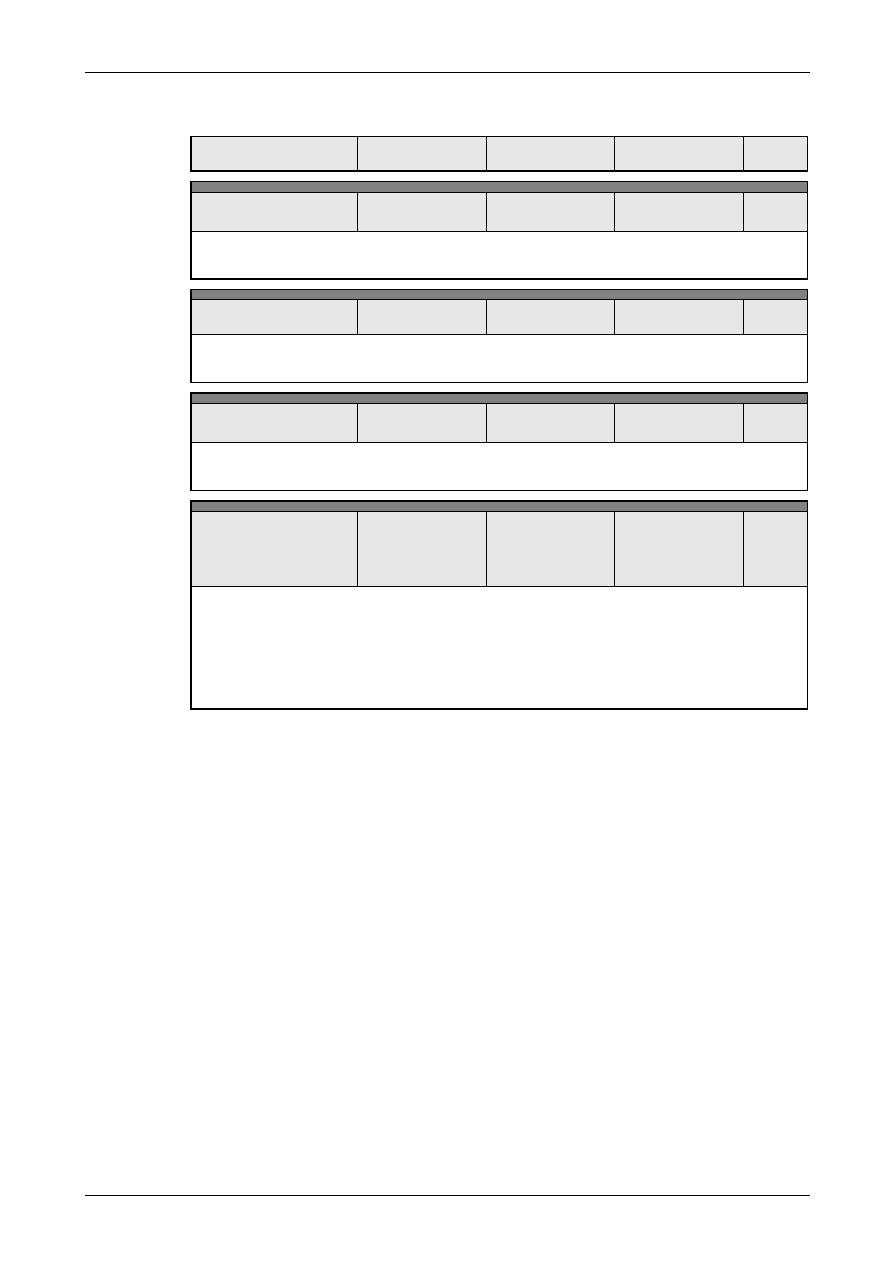
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 11
a
Patrz także: Rozdz. 3.1.4
b
P = Pozycjonowanie
S = Regulacja prędkości
T = Regulacja momentu
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Analogowe zadawanie
momentu
TC
CN1B-12
Wejście analogowe
T
Sygnał służy do regulacji generowanego momentu wewnątrz dostępnego zakresu momentu wyjściowego silnika
przez podanie napięcia 0 do ±8VDC na zaciski TC-LG. Najwyższy moment generowany jest przy napięciu ±8V.
Wartość momentu, generowanego przy napięciu ±8V, może być zmieniana przy pomocy Pr. 26
Analogowe zadawanie
prędkości
VC
CN1B-2
Wejście analogowe
S
Prędkość serwosilnika zadawana jest sygnałem napięciowym. Podaj napięcie 0 do ±10VDC na zaciski VC-LG.
Napięciu ±10V odpowiada prędkość określona w Pr. 25.
Rozdzielczość wejścia: 14 bit
Analogowe ograniczenie
prędkości
VLA
CN1B-2
Wejście analogowe
T
Przy aktywnym analogowym ograniczeniu prędkości możliwe jest ograniczenie prędkości maksymalnej wewnątrz
normalnie dostępnego zakresu. Podaj napięcie 0 do +10VDC na zaciski VLA-LG.
Napięciu +10V odpowiada prędkość określona w Pr. 25
Ciąg impulsów dla obrotów
w prawo
Ciąg impulsów dla obrotów
w lewo
PP
NP
PG
NG
CN1A-3
CN1A-2
CN1A-13
CN1A-12
DI-2
P
Zaciski służą do wprowadzania zadającego ciągu impulsów:
1) W systemie z otwartym kolektorem (max. częstotliwość impulsów 200 kHz):
Ciąg impulsów dla obrotów w prawo na zaciski PP-SG.
Ciąg impulsów dla obrotów w lewo na zaciski NP-SG
2) W systemie ze sterownikiem linii różnicowej (max. częstotliwość impulsów 500 kHz):
Ciąg impulsów dla obrotów w prawo na zaciski PG-PP.
Ciąg impulsów dla obrotów w lewo na zaciski NG-NP.
Forma ciągu impulsów może być zmieniana przy pomocy Pr. 21.
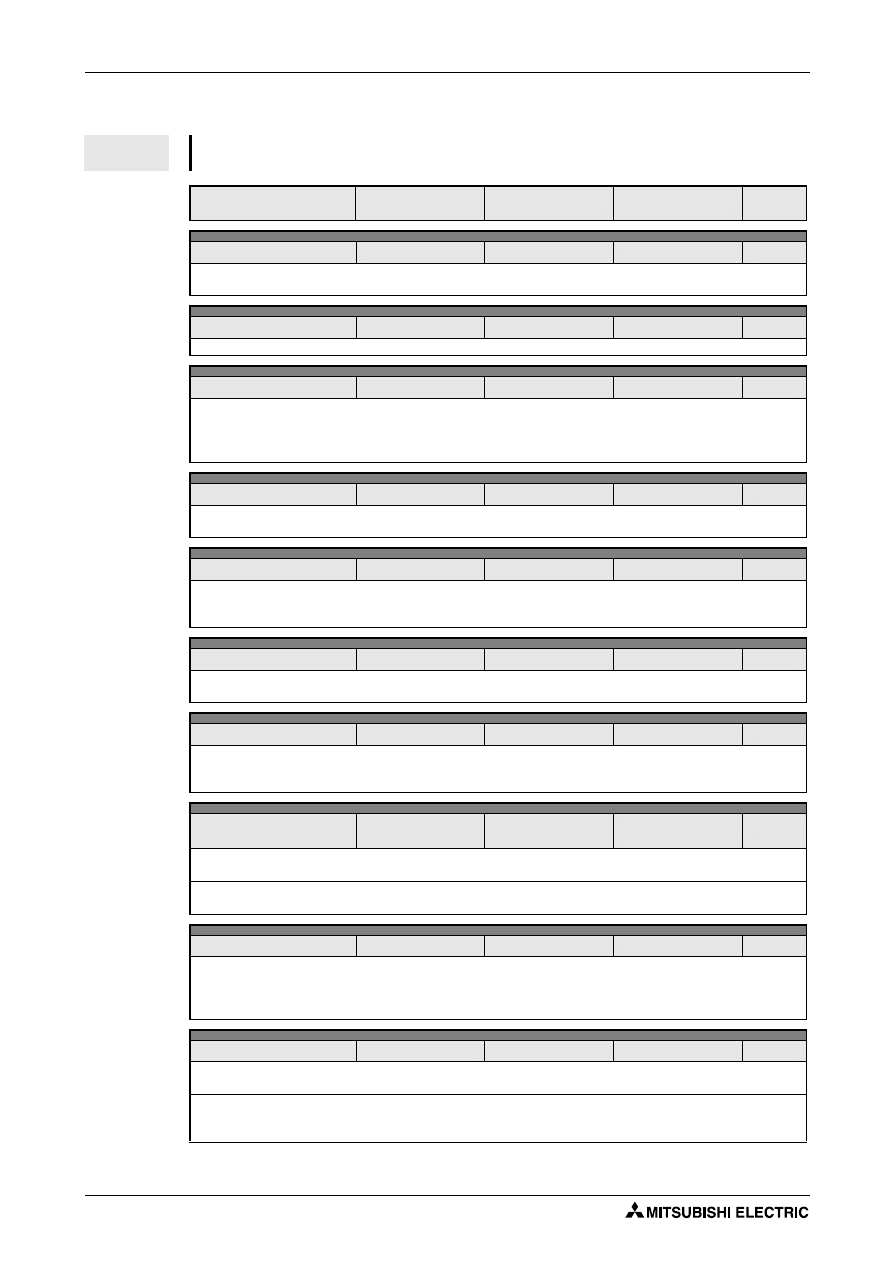
Podłączanie
Podłączanie serwowzmacniacza
3 - 12
Opis sygnałów wyjściowych
UWAGA:
Wyjścia dwustanowe serwowzmacniaczy MR-J2S pracują tylko w logice negatywnej (sink).
Przez "sygnał włączony" (ON) rozumie się zawsze stan zwarcia zacisku wyjściowego do masy.
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Alarm
ALM
CN1B-18
DO-1
P S T
Zaciski ALM-SG są zwierane przy wyłączonym zasilaniu oraz przy zadziałaniu zabezpieczenia, które odcina
wyjście obwodu mocy. W stanie bez alarmu zaciski ALM-SG są rozwierane w ciągu 1s po załączeniu zasilania.
Gotowość
RD
CN1A-19
DO-1
P S T
Zaciski RD-SG są zwierane, gdy serwonapęd jest załączony i serwowzmacniacz jest gotowy do pracy.
Pozycjonowanie wykonane INP
CN1A-18
DO-1
P
Zaciski INP-SG są zwierane, gdy ilość impulsów uchybu mieści się w dopuszczalnym zakresie błędu pozycji
zadanej. Wielkość zakresu "Pozycjonowanie wykonane" może być zmieniana przy pomocy parametru Pr. 5.
UWAGA: Przy zwiększonej szerokości zakresu "Pozycjonowanie wykonane" zaciski INP-SG mogą być zwarte pod-
czas ruchu silnika z niewielką prędkością
Prędkość osiągnięta
SA
CN1A-18
DO-1
S
Zaciski SA-SG są zwierane, gdy prędkość serwosilnika jest bliska prędkości zadanej.
Gdy prędkość zadana nie przewyższa 50 obr/min zaciski SA-SG mogą pozostawać stale zwarte.
Ograniczenie prędkości
VLC
CN1B-6
DO-1
T
Zaciski VLC-SG są zwierane, gdy prędkość osiąga wartość któregokolwiek z zadanych wewnętrznych ograniczeń
prędkości 1 do 7(parametry Pr. 8 do 10, 72 do 75) lub analogowego ograniczenia prędkości (VLA) w trybie
regulacji momentu. Zaciski są rozwierane, gdy wyłączany jest sygnał servo-on (SON).
Prędkość zero
ZSP
CN1B-19
DO-1
P S T
Zaciski ZSP-SG są zwierane, gdy prędkość serwosilnika jest równa lub mniejsza prędkości zero (wartość
fabryczna 50 obr/min). Wartość ta może być zmieniana przy pomocy parametru Pr. 24.
Ograniczenie momentu
TLC
CN1B-6
DO-1
P S
Zaciski TLC-SG są zwierane, gdy generowany moment osiąga wartość zaprogramowanego ograniczenia
momentu 1 (parametr Pr. 28) lub analogowego ograniczenia momentu (TLA). Zaciski są rozwierane, gdy
wyłączany jest sygnał Servo-on (SON).
Blokada luzownika elektro-
magnetycznego
MBR
(CN1B-19)
DO-1
P S T
UWAGA: Funkcja jest uruchamiana przez wpisanie w Pr. 1 wartości XX 1 X. Należy zwrócić uwagę, że niemożliwe
staje się wtedy użycie sygnału ZSP.
W stanie servo-off lub w stanie alarmu, zaciski MBR-SG są rozwierane. Przy wystąpieniu alarmu są one
rozwierane niezależnie od odcięcia wyjścia obwodu mocy.
Ostrzeżenie
WNG
—
DO-1
P S T
UWAGA: Aby używać sygnału WNG, należy przypisać go do wybranego zacisku wyjściowego przez odpowiednie
ustawienie Pr. 49. Użycie sygnału poprzednio przypisanego do tego zacisku stanie się niemożliwe.
Przy wystąpieniu ostrzeżenia, zaciski WNG-SG są zwierane. W stanie bez ostrzeżenia zaciski WNG-SG są
rozwierane w ciągu 1s po załączeniu zasilania.
Ostrzeżenie baterii
BWNG
—
DO-1
P S T
UWAGA: Aby używać sygnału BWNG, należy przypisać go do zacisku wyjściowego przez odpowiednie ustawienie
Pr. 49. Użycie sygnału poprzednio przypisanego do tego zacisku stanie się niemożliwe.
Przy wystąpieniu ostrzeżenia o przerwanym przewodzie baterii (AL.92) lub o rozładowaniu baterii (AL.9F), zaciski
WNG-SG są zwierane. W stanie bez ostrzeżenia zaciski BWNG-SG są rozwierane w ciągu 1s po załączeniu
zasilania.
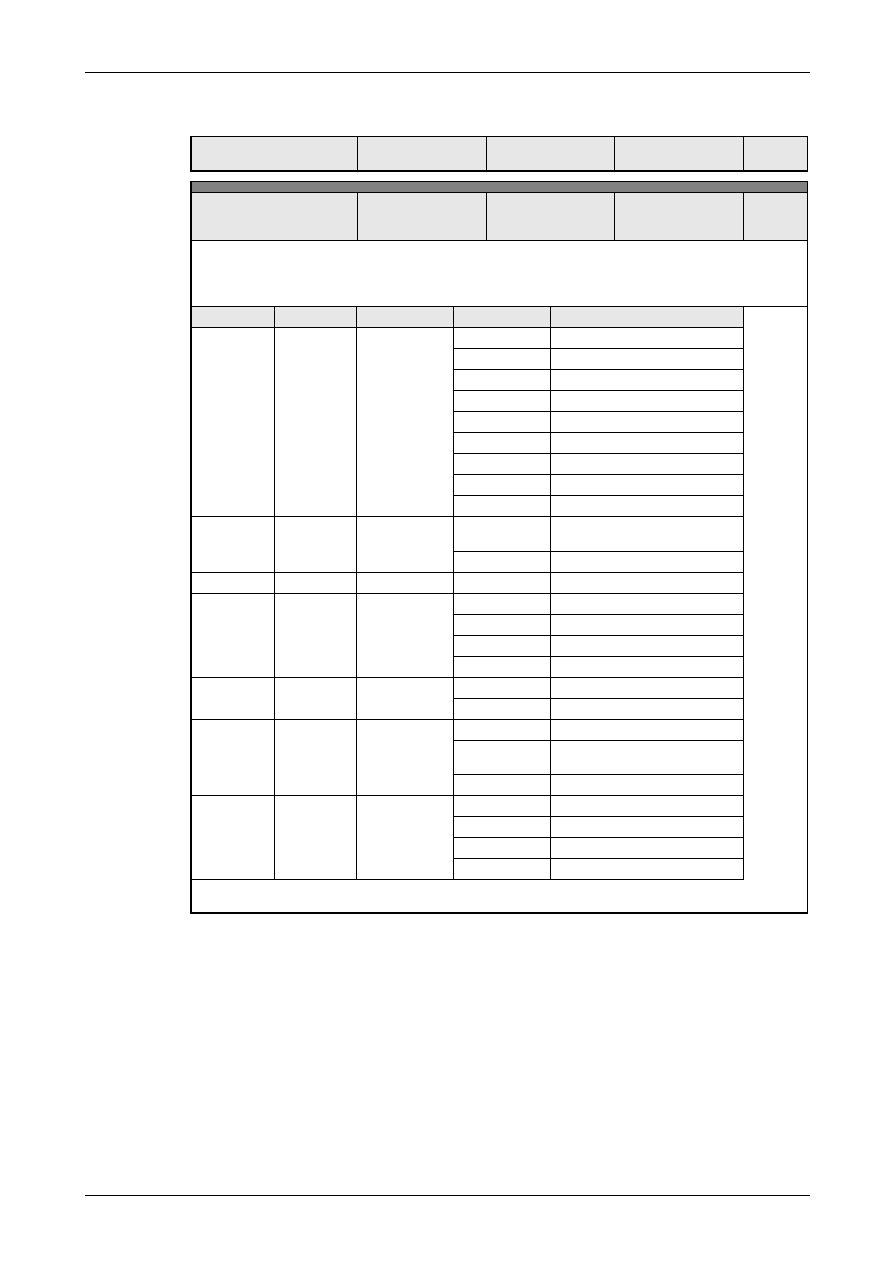
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 13
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Kod alarmu
CN1A-19
CN1A-18
CN1B-19
DO-1
P S T
UWAGA:
Aby używać tego sygnału, należy ustawić wartość Pr. 49 = XXX 1.
Sygnał ten jest wydawany przy wystąpieniu alarmu. W stanie bez alarmu wydawane są odpowiednie standardowe
sygnały (RD, INP, SA, ZSP). Stany logiczne odpowiednich wyjść, kody i nazwy alarmów wymienione są niżej.
CN1B 19
CN1A 18
CN1A 19
Kod alarmu
Błąd
0
0
0
8888
Watchdog
AL.12
Błąd pamięci 1
AL.13
Błąd zegara
AL.15
Błąd pamięci 2
AL.17
Błąd płyty głównej 2
AL.19
Błąd pamięci 3
AL.37
Błąd parametru
AL.8A
Time-out komunikacji szeregowej
AL.8E
Błąd komunikacji szeregowej
0
0
1
AL.30
Przeciążenie układu hamowania
regeneracyjnego
AL.33
Zbyt wysokie napięcie zasilania
0
1
0
AL.10
Zbyt niskie napięcie zasilania
0
1
1
AL.45
Przegrzanie obwodu mocy
AL.46
Przegrzanie serwosilnika
AL.50
Przeciążenie 1
AL.51
Przeciążenie 2
1
0
0
AL.24
Zwarcie doziemne
AL.32
Przeciążenie prądowe
1
0
1
AL.31
Zbyt wysoka prędkość
AL.35
Zbyt wysoka częstotliwość wejś-
ciowa
AL.52
Nadmierny uchyb
1
1
0
AL.16
Błąd enkodera 1
AL.1A
Niewłaściwy serwosilnik
AL.20
Błąd enkodera 2
AL.25
Utrata pozycji absolutnej
0: Zacisk - SG OFF (rozwarte)
1: Zacisk - SG ON (zwarte)
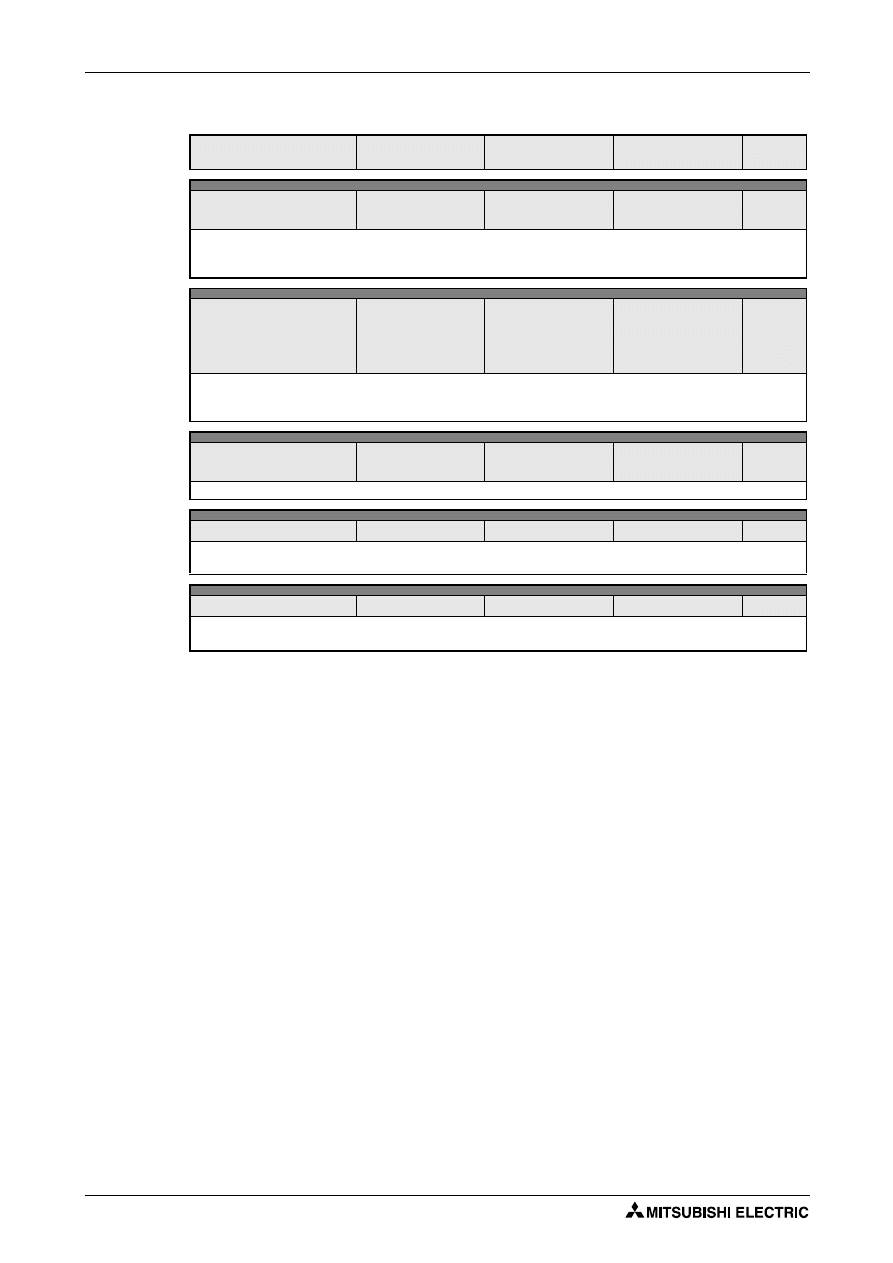
Podłączanie
Podłączanie serwowzmacniacza
3 - 14
a
Patrz także Rozdz. 3.1.4
b
P = Pozycjonowanie
S = Regulacja prędkości
T = Regulacja momentu
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
a
Tryb ste-
rowania
b
Impuls fazy Z enkodera
(otwarty kolektor)
OP
CN1A-14
DO-2
P S T
Sygnał punktu zerowego enkodera. Wydawany jest jeden impuls na każdy obrót serwosilnika. Zaciski OP i LG są
zwierane przy osiągnięciu punktu zerowego. Minimalna szerokość impulsu wynosi około 400 µs. Aby przy użyciu
tego impulsu wykonywać powrót do punktu bazowego, należy prędkość dojścia ustawić na 100 obr/min lub mniej.
Impuls fazy A enkodera
(sterownik linii różnicowej)
Impuls fazy B enkodera
(sterownik linii różnicowej)
LA
LAR
LB
LBR
CN1A-6
CN1A-16
CN1A-7
CN1A-17
DO-2
P S T
Wydawany jest dwufazowy ciąg impulsów w systemie sterownika linii różnicowej. Ilość impulsów na obrót
serwosilnika jest zadawana w parametrze Pr. 27. Wartość przesunięcia fazowego pomiędzy impulsami faz A i B w
zależności od kierunku obrotów i może być zmieniona przy użyciu Pr. 54.
Impuls fazy Z enkodera
(sterownik linii różnicowej)
LZ
LZR
CN1A-5
CN1A-15
DO-2
P S T
Wydawany jest sygnał jak na wyjściu OP, lecz w systemie sterownika linii różnicowej.
Monitor analogowy 1
MO1
CN3-4
Wyjście analogowe
P S T
Służy do wyprowadzenia wartości wybranej w parametrze Pr. 17 jako sygnał napięciowy między zaciskami MO1-
LG. Rozdzielczość 10 bit.
Monitor analogowy 2
MO2
CN3-14
Wyjście analogowe
P S T
Służy do wyprowadzenia wartości wybranej w parametrze Pr. 17 jako sygnał napięciowy między zaciskami MO2-
LG. Rozdzielczość 10 bit
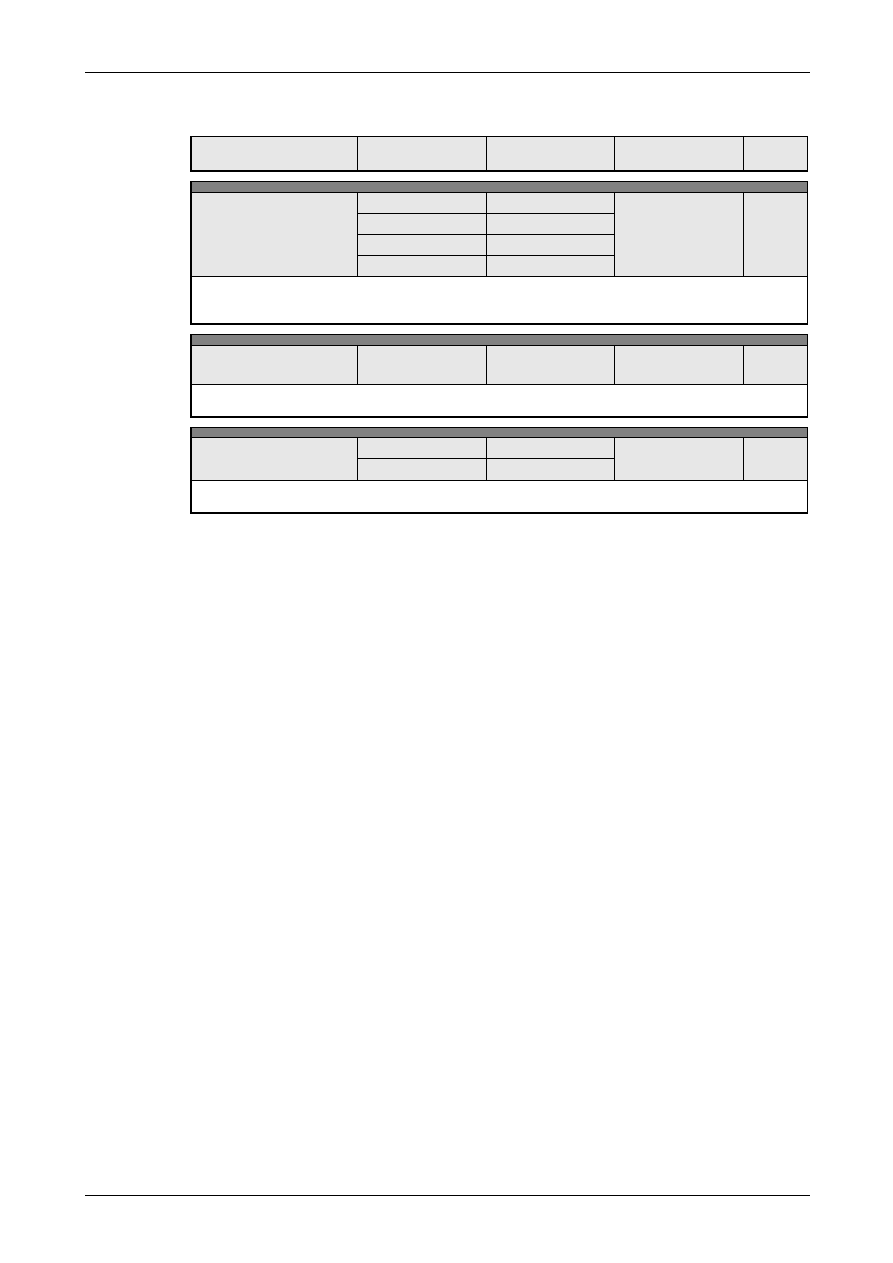
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 15
Szeregowy interfejs komunikacyjny
a
P = Pozycjonowanie
S = Regulacja prędkości
T = Regulacja momentu
Sygnał
Symbol
Złącze i nr styku
Grupa I/O
Tryb ste-
rowania
a
Interfejs RS422
SDP
CN3-9
—
P S T
SDN
CN3-19
RDP
CN3-5
RDN
CN3-15
Funkcje komunikacji RS-485 i RS-232C nie mogą być używane jednocześnie. Należy wybrać jedną z nich w
parametrze Pr. 16.
W serwowzmacniaczu ostatniej osi należy zewrzeć zaciski "15" i "10".
Zakończenie
linii RS-422
TRE
CN3-10
—
P S T
Zacisk służy do podłączenia rezystora końcowego (terminatora) linii RS-422. W ostatnim serwowzmacniaczu w
linii komunikacji należy połączyć ten zacisk z zaciskiem RDN (CN3-15).
Interfejs RS232
RXD
CN3-2
—
P S T
TXD
CN3-12
Funkcje komunikacji RS-485 i RS-232C nie mogą być używane jednocześnie. Należy wybrać jedną z nich w
parametrze Pr. 16.
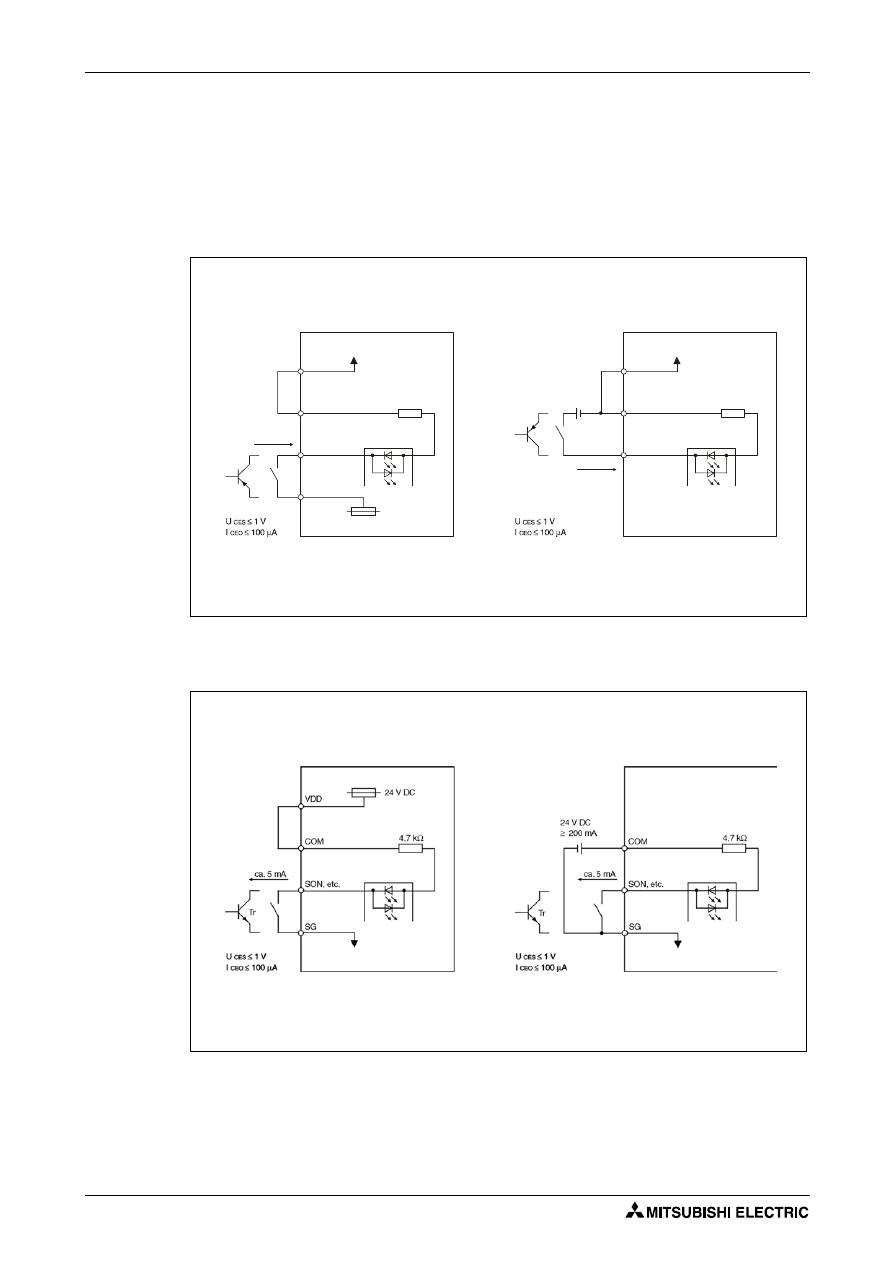
Podłączanie
Podłączanie serwowzmacniacza
3 - 16
3.1.4 Interfejsy
wejściowe i wyjściowe
Poniżej opisano szczegółowo sposób podłączania sygnałów wejściowych i wyjściowych (patrz
Rozdz. 3.1.3).
Cyfrowy interfejs wejściowy DI-1
Sygnały mogą być podawane z przekaźnika lub z tranzystora w układzie otwartego kolektora.
S000545aC
Rys. 3-2: Podłączanie elementów zewnętrznych (logika source)
S000545bT
Rys. 3-3: Podłączanie elementów zewnętrznych (logika sink)
SG
Tr
COM
4,7 k
Ω
SON, etc.
VDD
24 V DC
ca. 5 mA
SG
24 V DC
200 mA
≥
COM
4,7 k
Ω
SON, etc.
Tr
ca. 5 mA
Zasilanie wewnętrzne
Zasilanie zewnętrzne
Zasilanie wewnętrzne
Zasilanie zewnętrzne
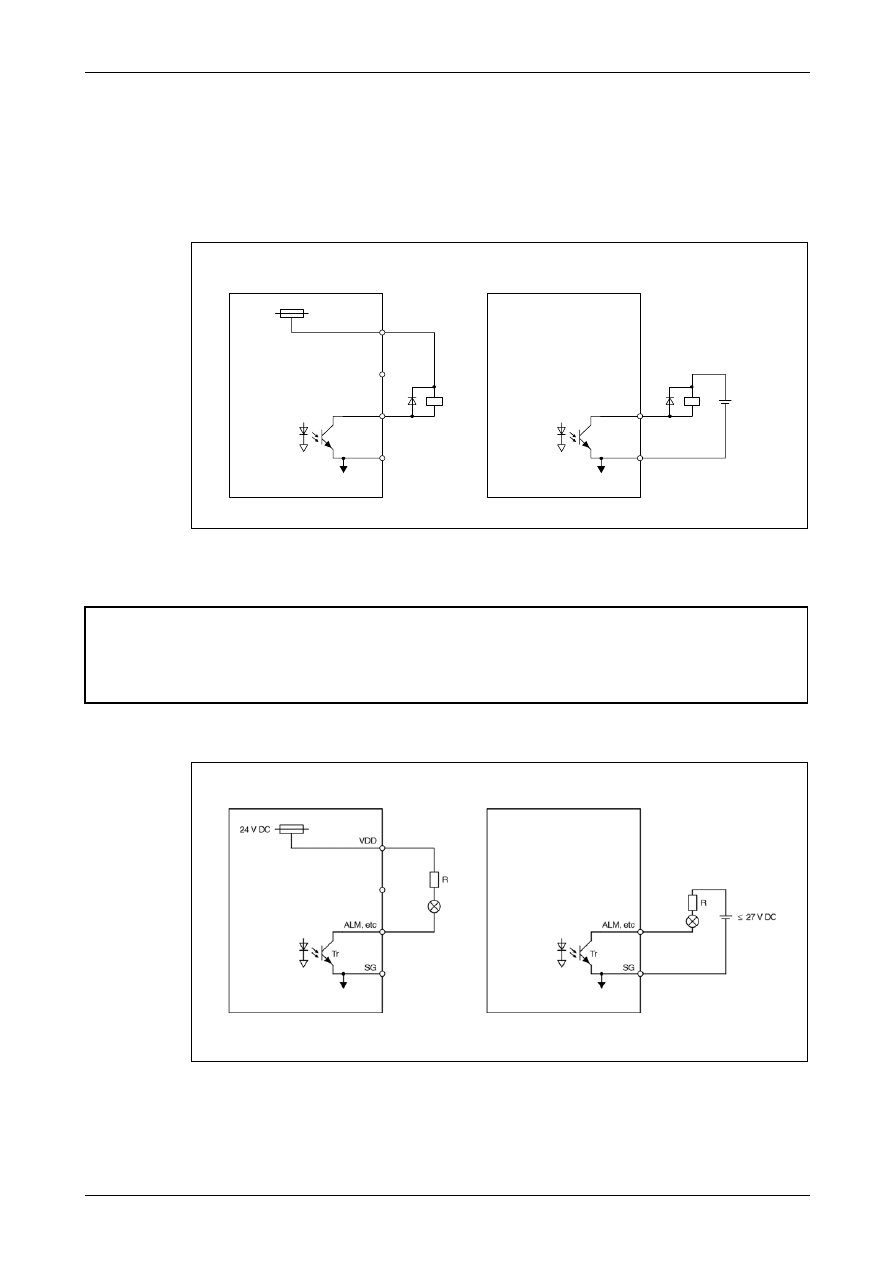
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 17
Cyfrowy interfejs wyjściowy DO-1
Z wyjścia może być wysterowana np. żarówka, przekaźnik lub transoptor. Dla obciążenia in-
dukcyjnego bezwzględnie powinna być stosowana dioda zwrotna D, a w przypadku żarówki -
opornik ograniczający prąd początkowy R (dopuszczalny prąd ciągły: 40 mA, prąd szczytowy:
100 mA).
●
Obciążenie indukcyjnością
●
Podłączanie żarówki
S001188C
Rys. 3-4: Podłączanie obciążenia indukcyjnego
!
UWAGA:
Przy podłączaniu obciążenia indukcyjnego należy bezwzględnie przestrzegać pra-
widłowej biegunowości diody zwrotnej D. Błędna biegunowość może spowodować
uszkodzenie serwowzmacniacza.
S001189T
Rys. 3-5: Podłączanie żarówki
VDD
ALM, etc
ALM, etc
SG
SG
24 V DC
27
V
DC
≤
Tr
Tr
D
D
Zasilanie wewnętrzne
Zasilanie zewnętrzne
Zasilanie wewnętrzne
Zasilanie zewnętrzne
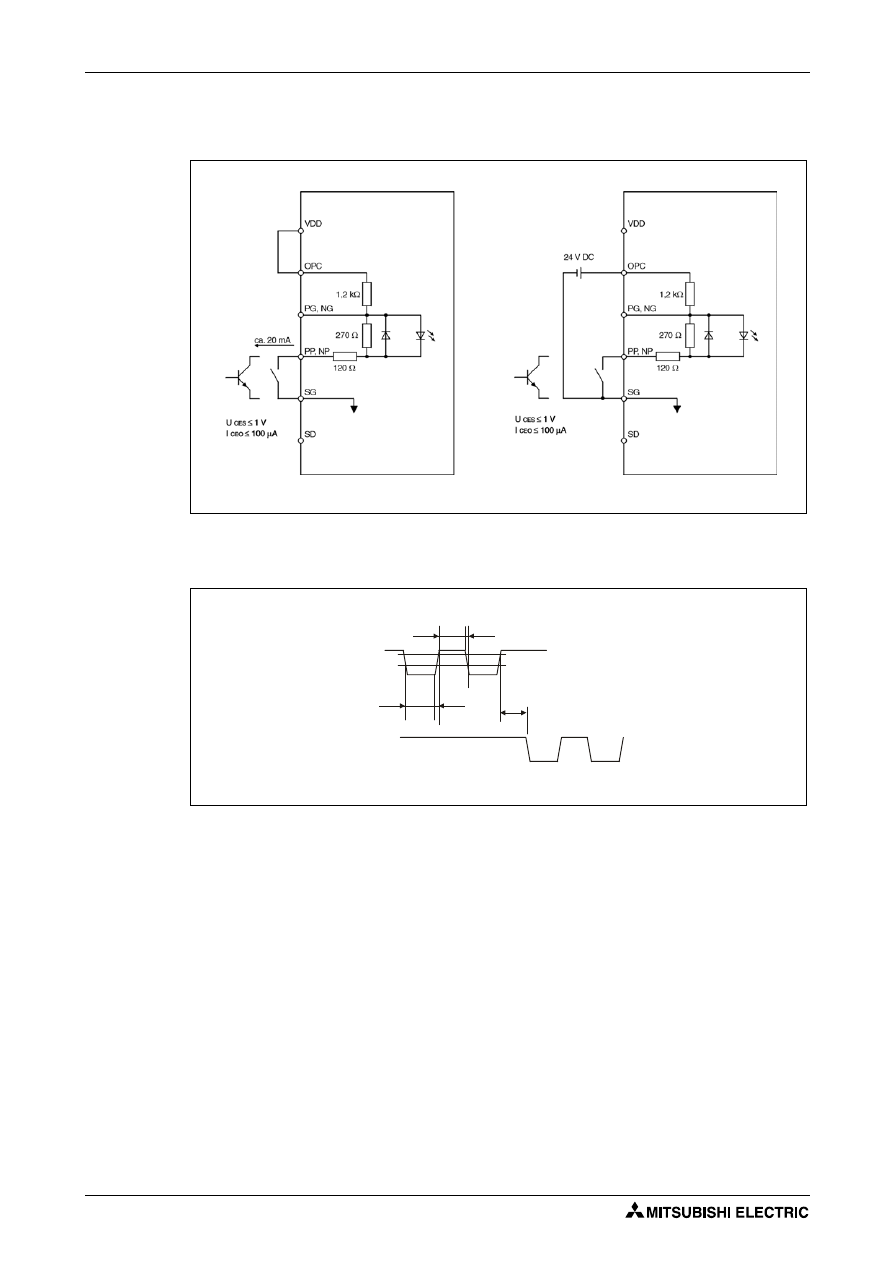
Podłączanie
Podłączanie serwowzmacniacza
3 - 18
Interfejs wejściowy ciągu impulsów DI-2
●
Otwarty kolektor (maksymalna częstotliwość wejściowa: 200.000 impulsów/s)
S000548bT
Rys. 3-6: Przykład podłączenia (logika sink)
S000549C
Rys. 3-7: Parametry ciągu impulsów
Zasilanie wewnętrzne
Zasilanie zewnętrzne
0,9
tc
tF
0,1
tLH
tc
tHL
tLH = tHL < 0,2 s
tc > 2 s
tF > 3 s
µ
µ
µ
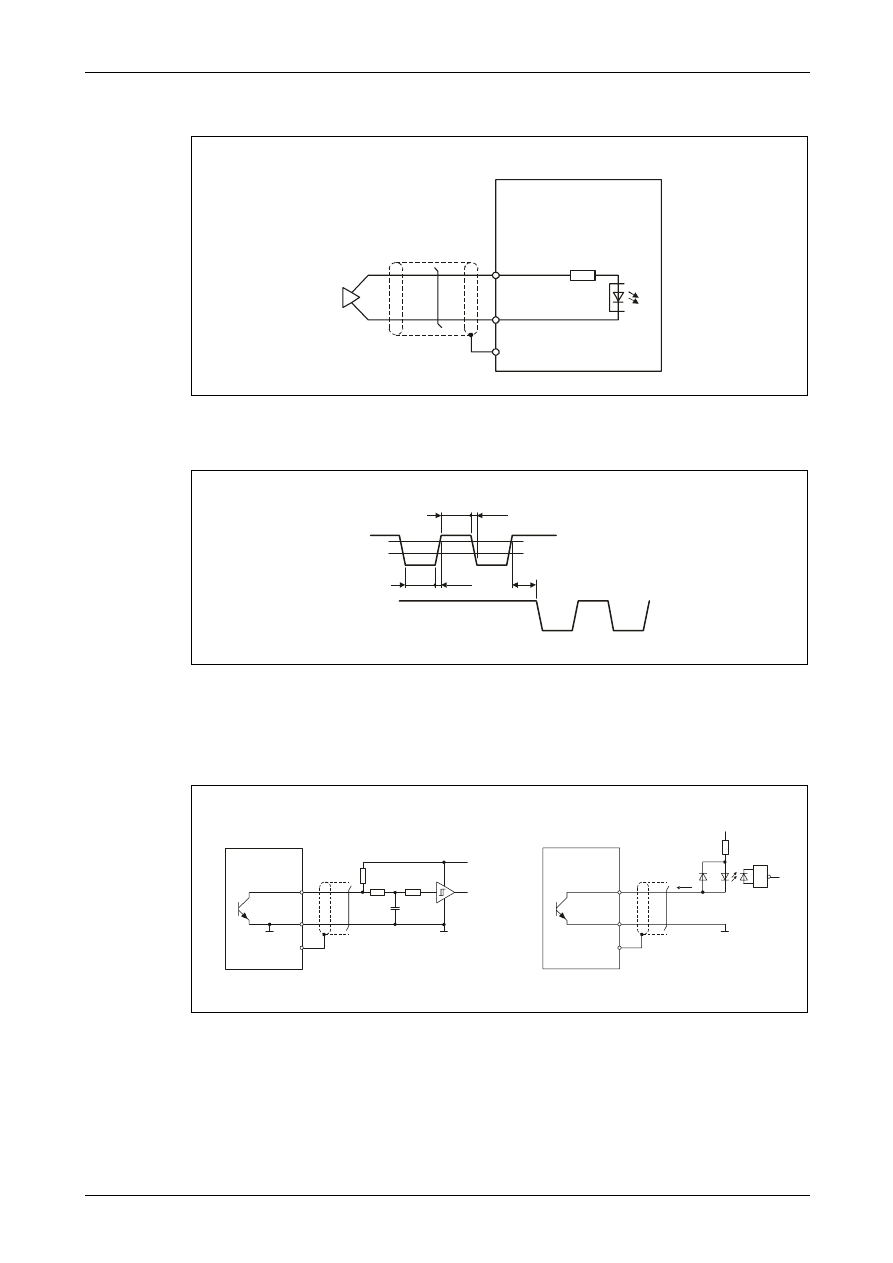
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 19
●
Wejście różnicowe (maksymalna częstotliwość wejściowa: 500.000 impulsów/s)
Emulowane wyjście impulsów enkodera DO-2
●
Otwarty kolektor
max. prąd wyjściowy 35 mA
S000550C
Rys. 3-8: Przykład podłączenia
S000551C
Rys. 3-9: Parametry ciągu impulsów
S000552C
Rys. 3-10: Przykład podłączania
100
Ω
PG(NG)
PP(NP)
SD
AM26LS31
max. częstotliwość impulsów
wejściowych:
500.000 impulsów/s
Serwowzmacniacz
0,9
tLH = tHL <0,1 s
tc >1
µ
µ
µ
s
tF >3 s
0,1
tc
tHL
tc
tF
tLH
SD
LG
OP
SD
LG
OP
5 – 24 V DC
&
Serwowzmacniacz
Serwowzmacniacz
Transoptor
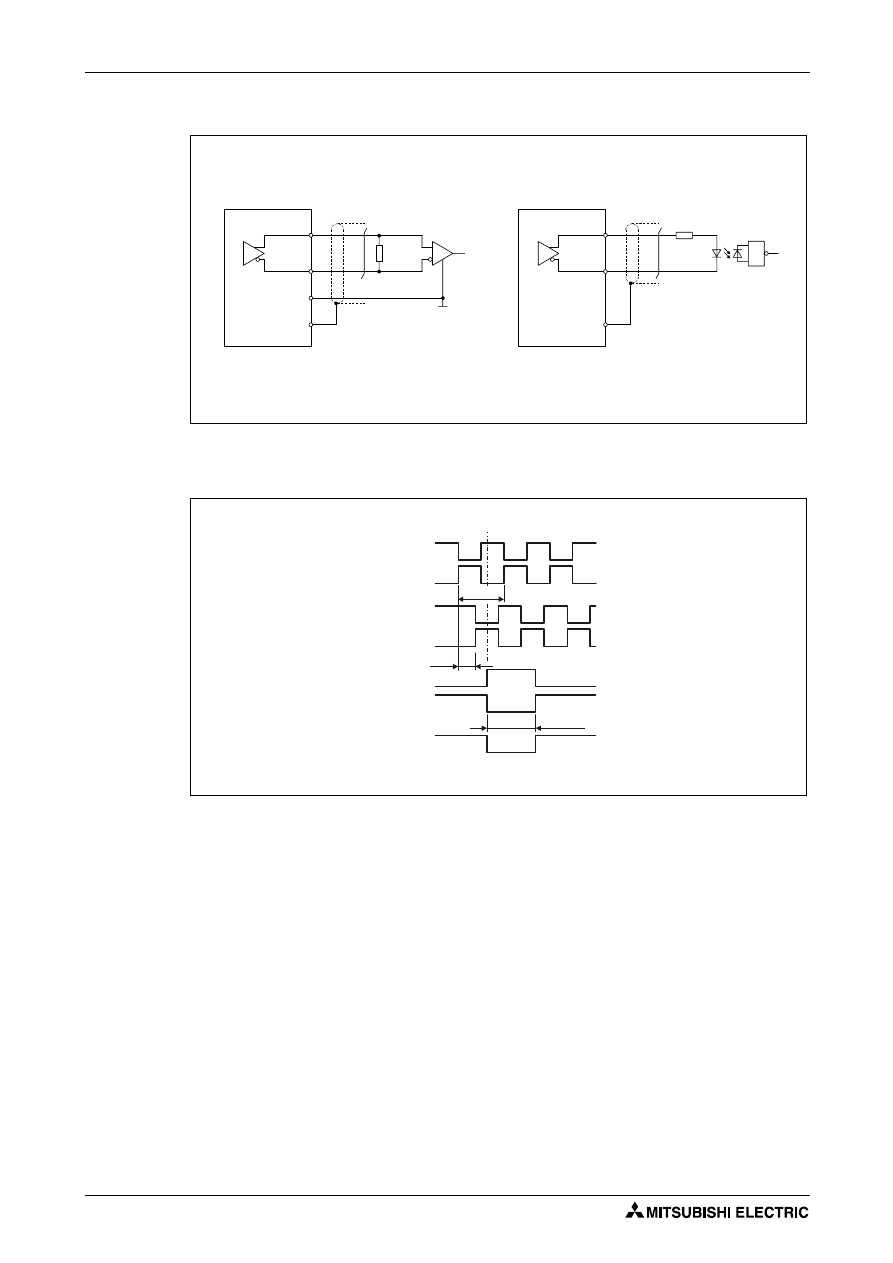
Podłączanie
Podłączanie serwowzmacniacza
3 - 20
●
Wyjście różnicowe
S001190C
Rys. 3-11: Przykład podłączania
S000554C
Rys. 3-12: Parametry czasowe impulsów wyjściowych
SD
SD
LG
150
Ω
100
Ω
LA
(LB, LZ)
LA
(LB, LZ)
LAR
(LBR, LZR)
LAR
(LBR, LZR)
&
Serwowzmacniacz
Serwowzmacniacz
szybki
transoptor
AM26LS32 itp.
LA
LAR
LB
T
π
/2
LBR
LZ
LZR
OP
>400 s
µ
On
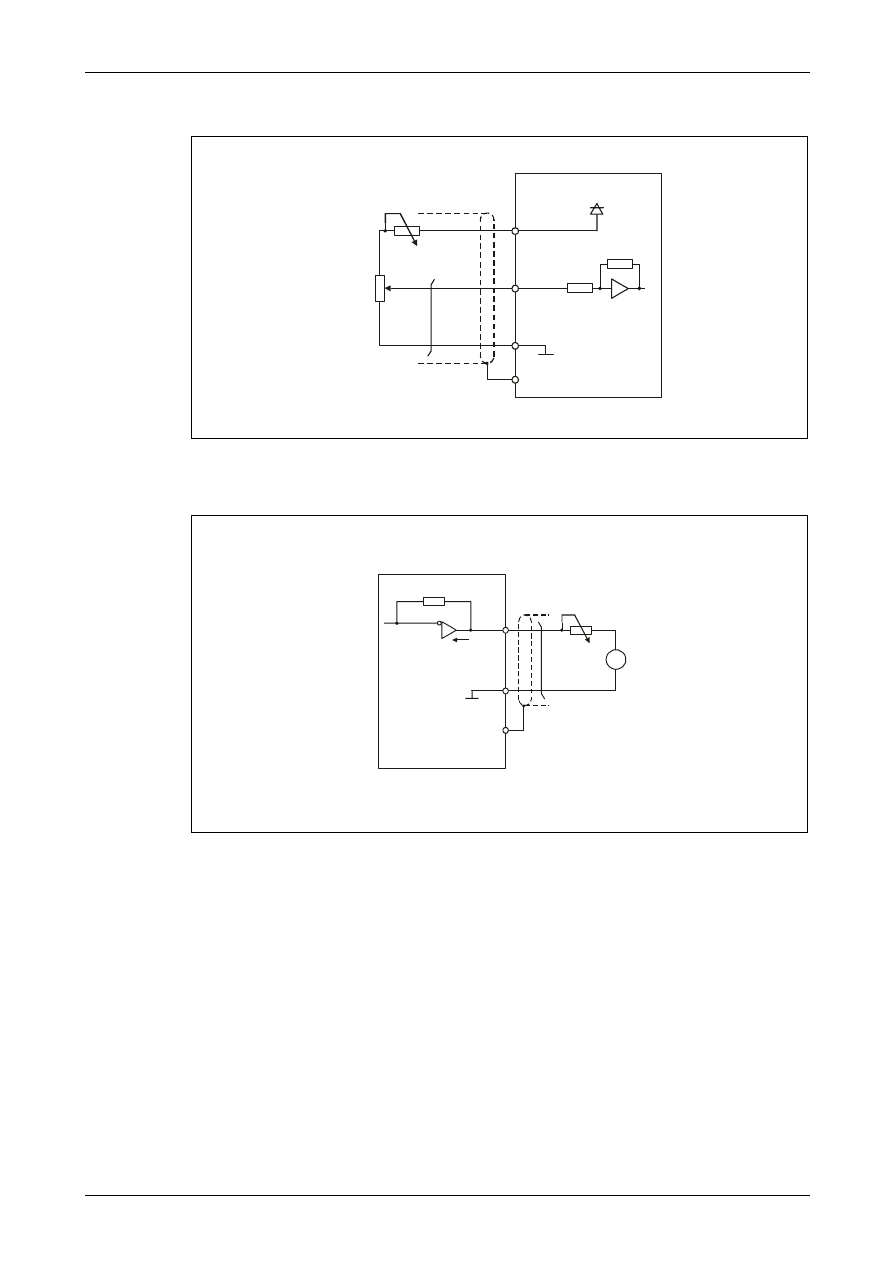
Podłączanie serwowzmacniacza
Podłączanie
MELSERVO J2-Super
3 - 21
Wejście analogowe
Wyjście analogowe
S000555C
Rys. 3-13: Przykład podłączania
S000556C
Rys. 3-14: Przykład podłączania
P15R
+15 V DC
VC, etc.
LG
SD
2k
Ω
10k
Ω
1k
Ω
Serwowzmacniacz
Rezystancja wejściowa
10–12 k
Ω
A
MO1
(MO2)
LG
10k
Ω
SD
Wyjście
±10 V / 1 mA
Serwowzmacniacz
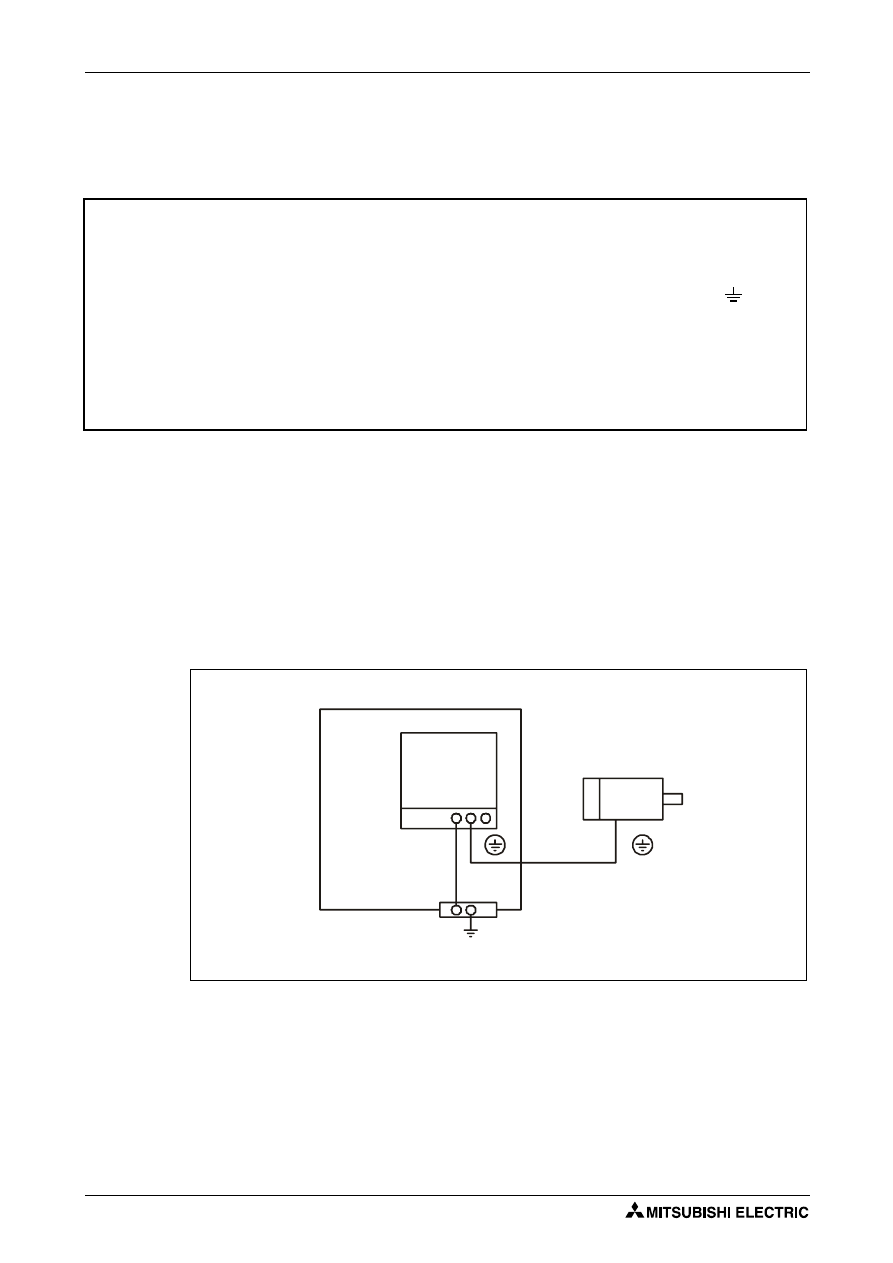
Podłączanie
Serwosilnik
3 - 22
3.2 Serwosilnik
3.2.1 Podłączanie serwosilnika
1) Serwosilnik należy podłączać wyłącznie z użyciem przeznaczonych do tego wtyków.
2) Przewód uziemiający serwosilnika należy podłączyć do zacisku uziemienia (PE) serwow-
zmacniacza, a następnie kabel uziemiający serwowzmacniacza do szyny uziemiającej
szafy sterowniczej. Nie należy łączyć ich indywidualnie do szyny uziemiającej (patrz Rys.
3-15).
3) Nie należy łączyć obwodów zasilania 24VDC interfejsów i luzownika. Do zasilania luzownika
zawsze używaj odrębnego zasilacza .
!
OSTRZEŻENIE:
●
Należy bezwzględnie zapewnić prawidłowe uziemienie serwosilnika i serwowzmac-
niacza.
W celu uniknięcia porażenia elektrycznego należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z
zaciskiem uziemiającym szafy sterowniczej.
●
Zaciski wyjściowe U, V, W obwodu mocy serwowzmacniacza muszą być połączone
z jednoimiennymi zaciskami zasilania serwosilnika. Omyłkowe połączenie faz spo-
woduje nieprawidłową pracę serwosilnika.
●
Nie wolno podłączać serwosilnika bezpośrednio do sieci prądu przemiennego.
Spowoduje to nieprawidłową pracę i uszkodzenie serwosilnika.
S000557C
Rys. 3-15: Podłączanie uziemienia ochronnego
Serwowzmac-
niacz
Zaciski PE
Szafa
sterownicza
Serwosilnik
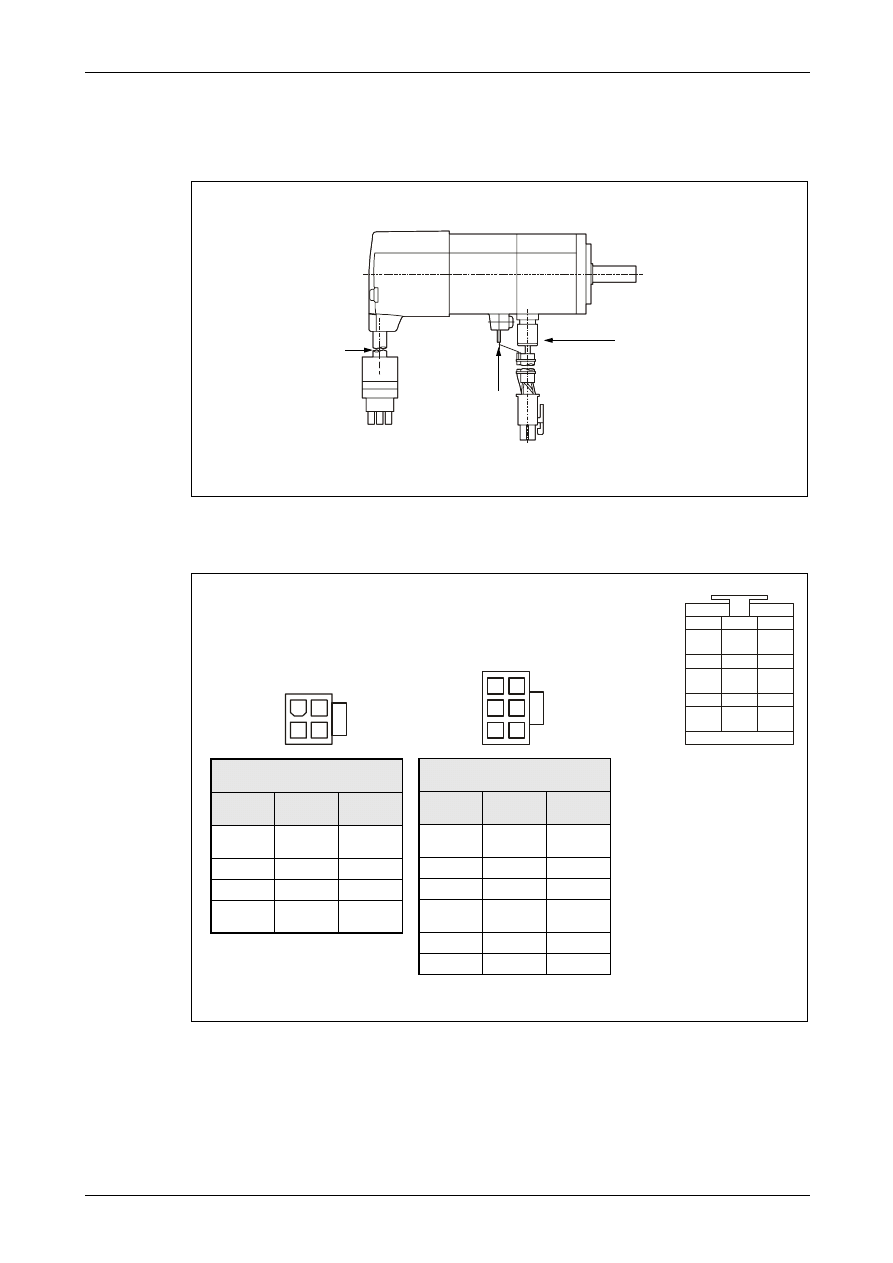
Serwosilnik
Podłączanie
MELSERVO J2-Super
3 - 23
3.2.2 Podłączanie serwosilnika
Serwosilniki HC-KFS (B) / HC-MFS (B)
* 24 V DC - biegunowość nieistotna
S000883C
Rys. 3-16: Serwosilniki serii HC-KFS (B) i HC-MFS (B)
S000884C
Rys. 3-17: Podłączanie zasilania, enkodera i luzownika
Złącze enkodera
Złącze luzownika
Złącze zasilania
czerwony: faza U
biały: faza V
czarny: faza W
zielono-żółty: PE
1
3
4
2
1
4
5
6
2
3
MRR
MDR CNT
LG
2
5
8
BAT
SHD
3
6
9
MR
MD
P5
1
4
7
Złącze zasilania
MR-PWCNK1
Styk
Sygnał
Kabel-
farbe
1
U
czer-
wony
2
V
biały
3
W
czarny
4
PE
zielono-
żółty
Złącze zasilania
MR-PWCNK2
Styk
Sygnał
Kabel-
farbe
1
U
czer-
wony
2
V
biały
3
W
czarny
4
PE
zielono-
żółty
5
B1 *
—
6
B2 *
—
bez luzownika
z luzownikiem
Widok od strony zacisków
Złącze enkodera
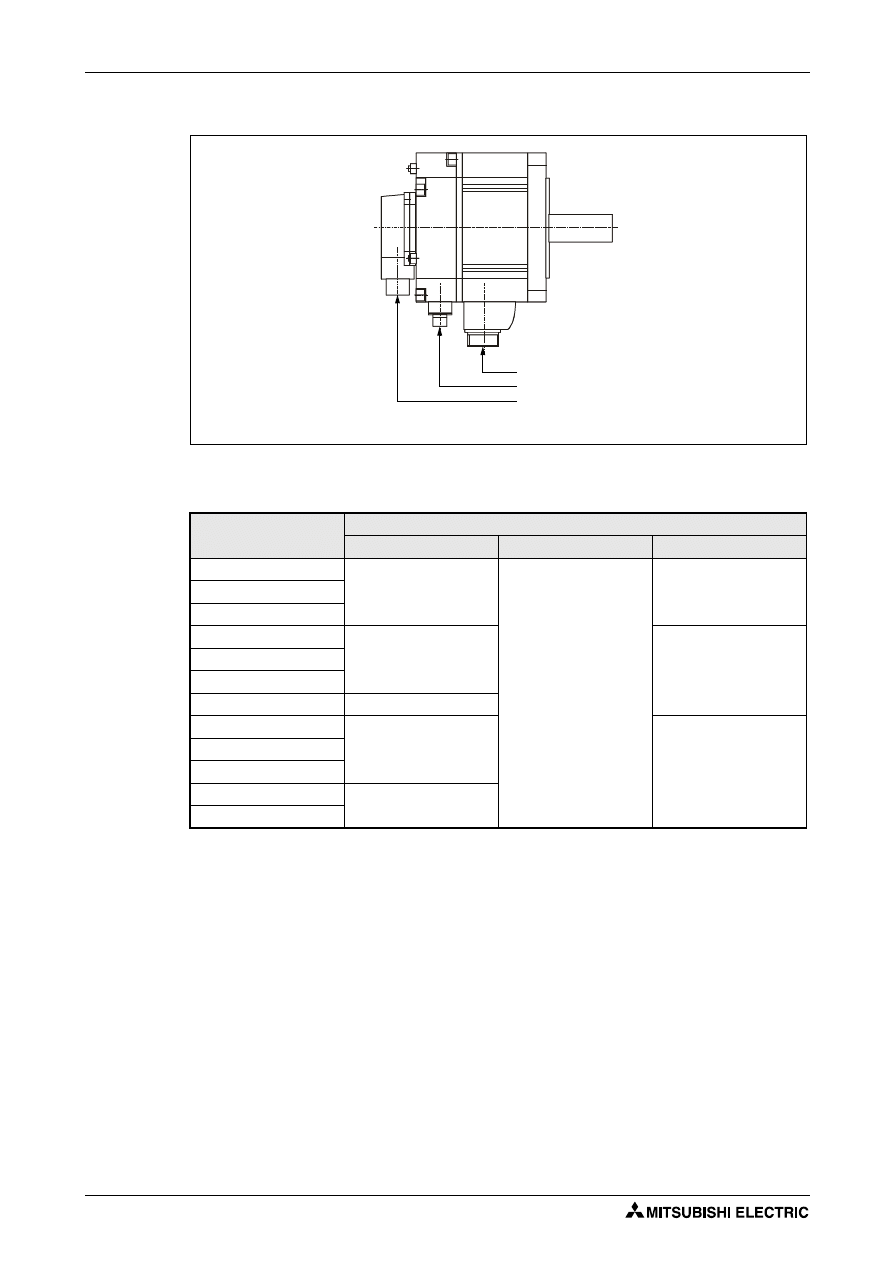
Podłączanie
Serwosilnik
3 - 24
Serwosilniki serii HC-SFS (B) / HC-RFS (B)
S000562C
Rys. 3-18: Serwosilniki serii HC-SFS (B) / HC-RFS (B)
Servomotor
Wtyk:
zasilania
enkodera
luzownika
HC-SFS52
MR-PWCNS1
MR-J2CNS (zestaw)
w złączu zasilania
HC-SFS102
HC-SFS152
HC-SFS202
MR-PWCNS2
MR-BKCN
HC-SFS352
HC-SFS502
HC-SFS702
MR-PWCNS3
HC-RFS103
MR-PWCNS1
w złączu zasilania
HC-RFS153
HC-RFS203
HC-RFS353
MR-PWCNS2
HC-RFS503
Tab. 3-5: Elementy połączeniowe zasilania, enkodera i luzownika
Złącze zasilania
Złącze luzownika
Złącze enkodera
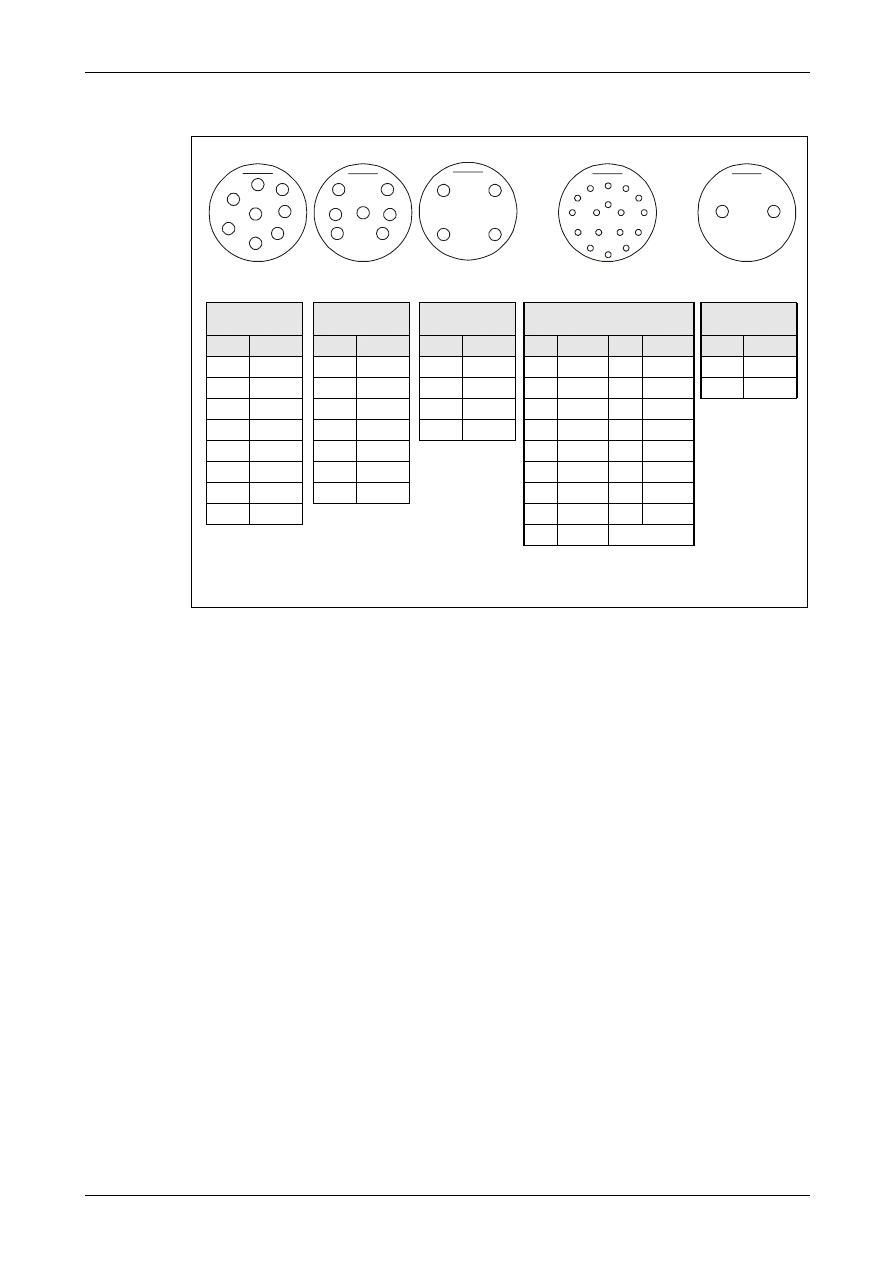
Serwosilnik
Podłączanie
MELSERVO J2-Super
3 - 25
* 24 V DC - biegunowość nieistotna
W serwosilnikach HC-SFS52B/102B/152B oraz HC-RFS103B/153B/203B/353B/503B złącze luzown-
ika jest zintegrowane ze złączem zasilania.
S000898C
Rys. 3-19: Rozkład styków w złączach zasilania, enkodera i luzownika
A
B
G
H
E
B
D
C
F
A
G
D
B
E
C
F
A
A
N
B
M
C
L
G
D
K
T
P
E
J
S
R
F
H
B
C
A
D
Wtyk luzownika
MR-BKCN
Styk
Sygnał
A
B1 *
B
B2 *
Wtyk zasilania
MR-PWCNS1
Styk
Sygnał
A
U
B
V
C
W
D
PE
E
—
F
—
G
(B1) *
H
(B2) *
Wtyk enkodera
MR-J2CNS (zestaw)
Styk Sygnał Styk Sygnał
A
MD
K
—
B
MDR
L
—
C
MR
M
CNT
D
MRR
N
SD
E
—
P
—
F
BAT
R
LG
G
LG
S
P5
H
—
T
—
J
—
Wtyk zasilania
MR-PWCNS2
Styk
Sygnał
A
U
B
V
C
W
D
PE
E
B1 *
F
B2 *
G
—
Wtyk zasilania
MR-PWCNS3
Styk
Sygnał
A
U
B
V
C
W
D
PE
Widok od strony lutowania
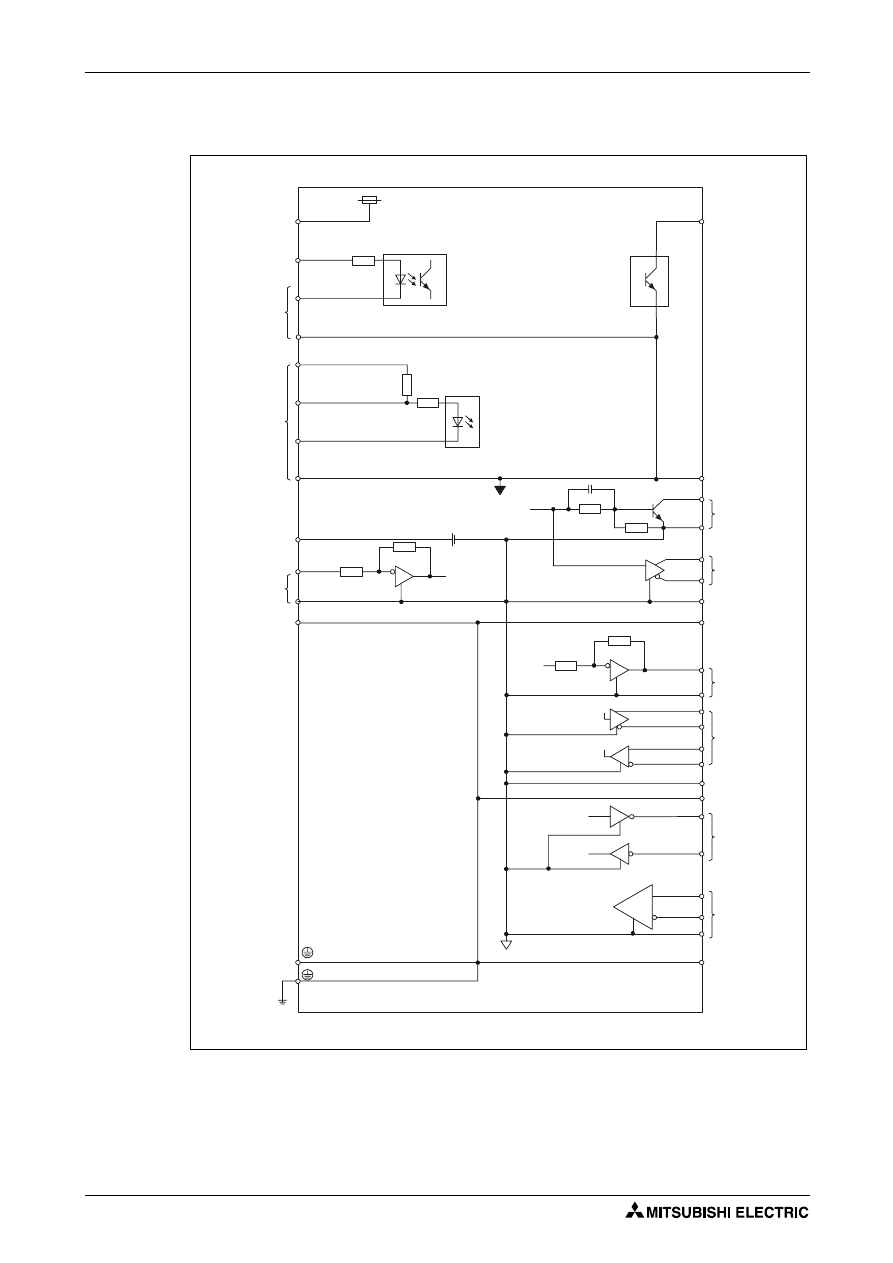
Podłączanie
Połączenia wewnętrzne i zaciski wspólne
3 - 26
3.3 Połączenia wewnętrzne i zaciski wspólne
S000863C
Rys. 3-20: Połączenia wewnętrzne i zaciski wspólne
OP
LG
LAR,
etc.
LA, etc.
SD
SD
LG
LG
SDN
RDN
RDP
SDP
SD
SG
PP, NP
PG, NG
OPC
SG
P15R
LG
LG
SD
LG
SG
ALM etc.
TLA
VC, etc.
MO1
MO2
MRR
RXD
TXD
MR
SON, etc.
COM
VDD
CN1A
CN1B
CN1A
CN1B
CN2
CN3
24 V DC
30 mA, 15 VDC 10 %
>
Wejścia
dwustanowe
Wejście ciągu im-
pulsów
Wejście analog.
+10V/max.wartość
Wejście
enkodera
Wyjścia
różnicowe
max. 35 mA
Wyjście typu
otwarty kolektor
max. 35 mA
Wyjścia
analogowe
Wyjścia
dwustanowe
RS232C
RS422
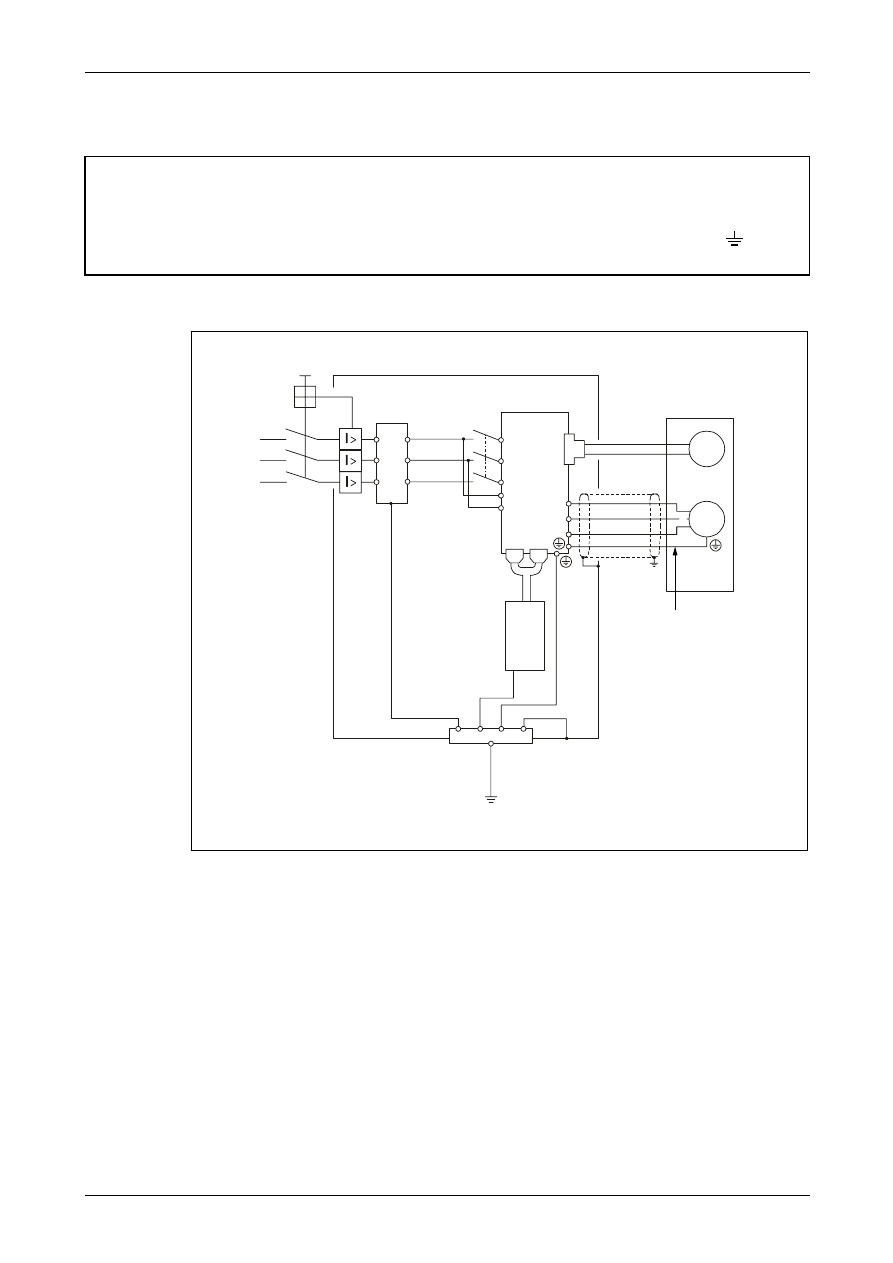
Uziemienie i ekranowanie
Podłączanie
MELSERVO J2-Super
3 - 27
3.4
Uziemienie i ekranowanie
!!!
OSTRZEŻENIE:
●
Serwowzmacniacz i serwosilnik muszą być uziemione w niezawodny sposób.
●
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z uzie-
mieniem ochronnym szafy sterowniczej.
S000565C
Rys. 3-21: Uziemienie ochronne i ekranowanie
Tranzystory mocy serwowzmacniacza są przełączane, generując napięcie przemienne dla serwosilnika.
Powoduje to generowanie szumów wysokiej częstotliwości, których poziom jest zależny od sposobu pro-
wadzenia przewodów silnika i uziemienia . Aby uniknąć zakłóceń, należy zawsze wykonywać uziemienie
urządzeń oraz ekranowanie połączeń między nimi zgodnie z powyższym schematem.
Aby zachować zgodność z dyrektywą EMC, skorzystaj z "Zaleceń instalacyjnych EMC" (EMC Installation
Guidelines – dokument Mitsubishi Electric IB(NA)67310).
L1
L2
CN2
CN1A
MC
L3
L11
L21
M
W
V
U
Encoder
CN1B
W
V
U
Szafa sterownicza
Fi
ltr
EMC
Uziemienie
Mo
du
ł pozyc-
jonuj
ą
cy
itp.
Serwosilnik
Serwowzmacniacz
Zasilanie
200–230 V
50 Hz
Podłączyć uzie-
mienie!
L1
L2
L3
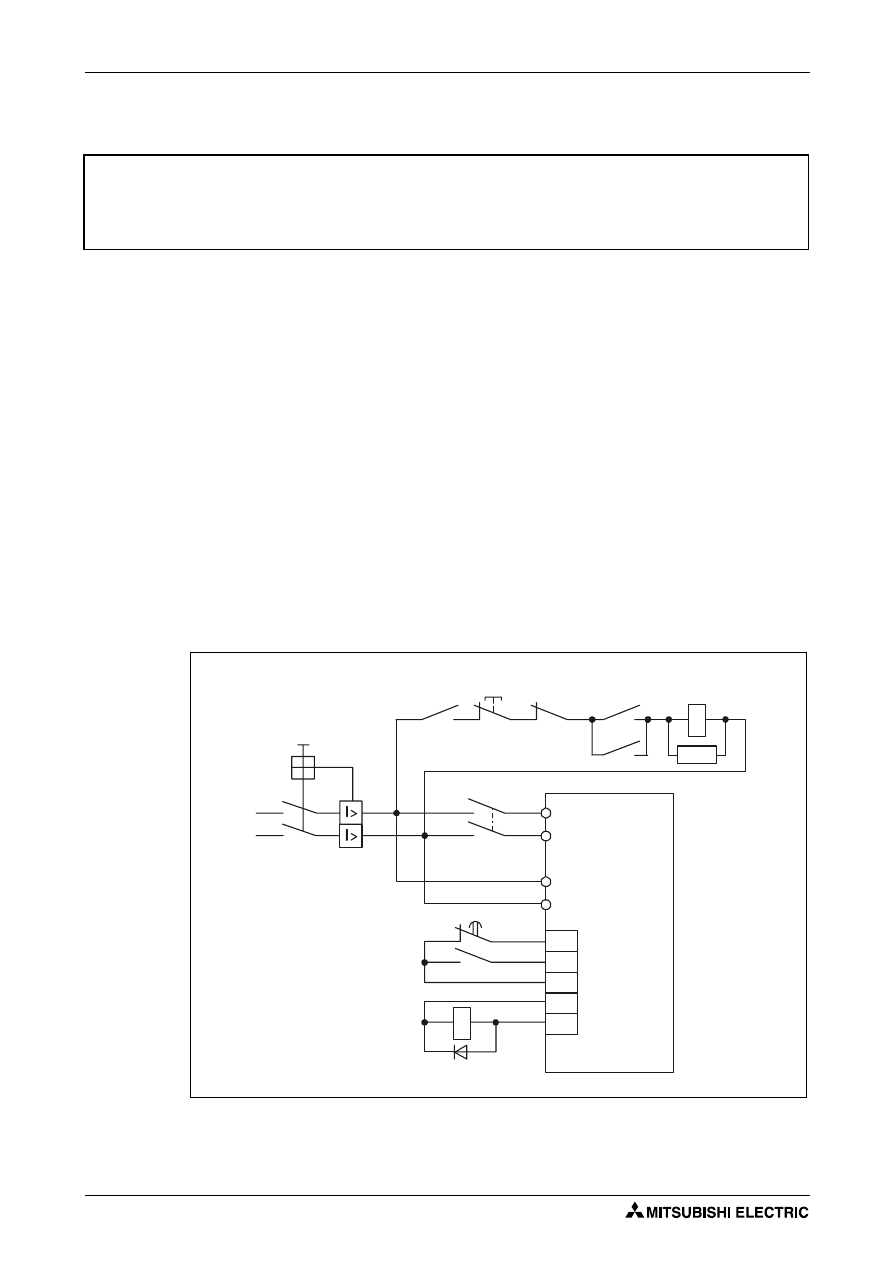
Podłączanie
Zasilanie
3 - 28
3.5 Zasilanie
Sekwencja załączania zasilania
Zasilanie powinno zawsze być podłączone poprzez stycznik (3x200V na zaciski L1, L2, L3, lub
w przypadku zasilania jednofazowego - 1x230V na zaciski L1, L2). Zaleca się zapewnienie
odłączania stycznika przy pojawieniu się alarmu przy pomocy zewnętrznych obwodów .
Zasilanie obwodów sterowania L11, L22 musi być załączane jednocześnie z zasilaniem ob-
wodu głównego lub wcześniej. Przy braku zasilania obwodu głównego po podaniu sygnału ser-
vo-on (SON) na wyświetlaczu pojawi się odpowiednie ostrzeżenie. Włączenie w takim stanie
zasilania głównego skasuje ostrzeżenie i serwowzmacniacz będzie działał prawidłowo.
Serwowzmacniacz akceptuje sygnał servo-on (SON) nie wcześniej, niż około 1 do 2 sekund po
włączeniu zasilania głównego. Tak więc, jeżeli SON jest podany równocześnie z włączeniem
zasilania głównego, obwody bazowe stopnia mocy zostaną załączone z 1-2 sekundowym
opóźnieniem, a sygnał gotowości (RD) po następnych ok. 20ms, po czym serwowzmacniacz
jest gotowy do pracy.
Podanie sygnału resetu (RES) powoduje odcięcie wyjścia obwodu mocy i wyhamowanie ser-
wosilnika wybiegiem.
Przykład schematu połączeń
Na poniższych rysunkach pokazano przykłady podłączania zasilania jedno- i trójfazowego:
!!!
ZAGROŻENIE:
●
Gdy serwowzmacniacz ulegnie uszkodzeniu, należy niezwłocznie odłączyć zasi-
lanie sieciowe. Zaleca się użycie sygnału alarmu do odłączenia zasilania.
S000566C
Rys. 3-22: Zasilanie jednofazowe serwowzmacniacza
L1
L2
MC
EMG
ALM
COM
SON
SG
L11
L21
RA
MC
SK
EMG
Servo ON
*
Zasilanie
1 x 230 V
50 Hz
Alarm
RA
EMG
OFF
ON
MC
Serwowzmacniacz
L1
N
* (Logika sink)
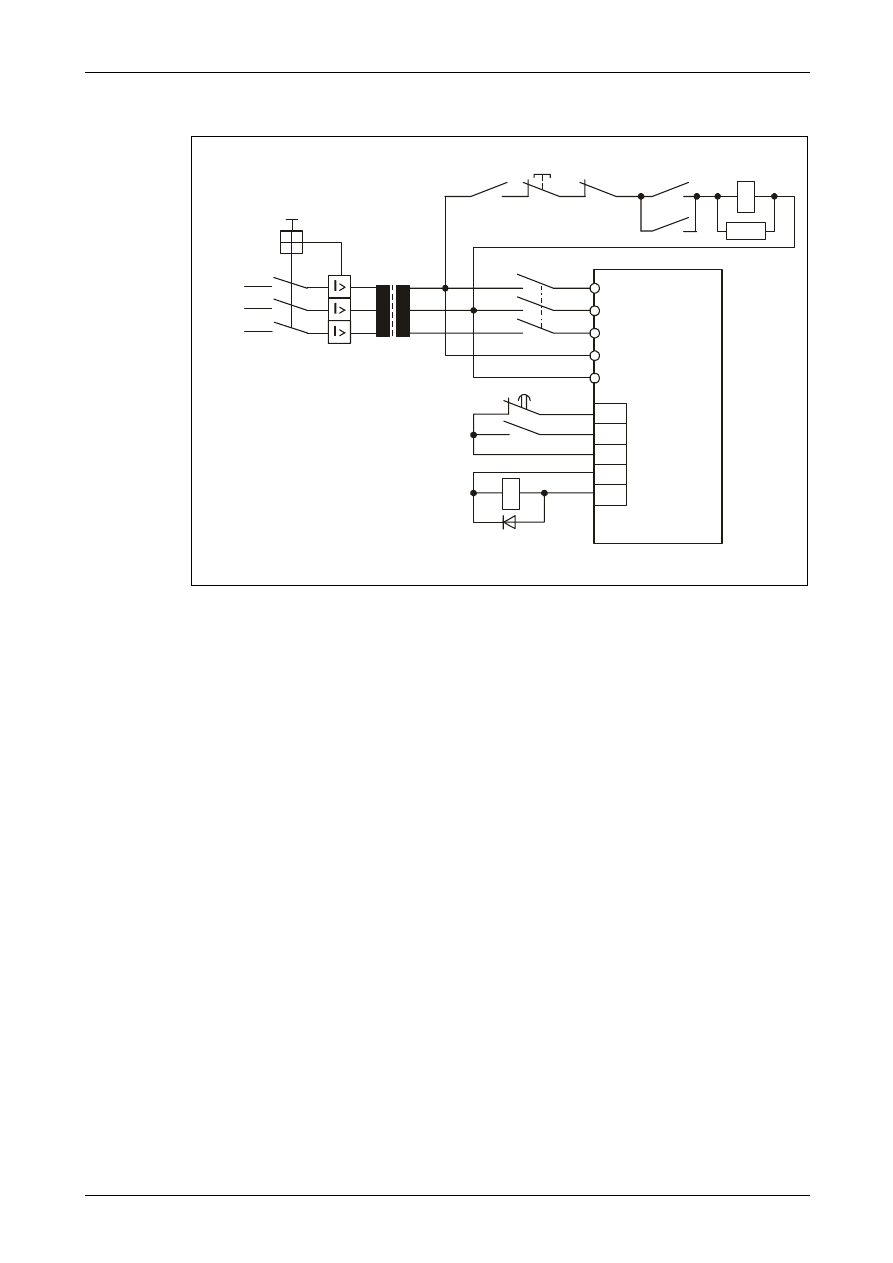
Zasilanie
Podłączanie
MELSERVO J2-Super
3 - 29
S000567C
Rys. 3-23: Zasilanie trójfazowe serwowzmacniacza
L1
L2
MC
L3
EMG
ALM
COM
SON
SG
L11
L21
RA
MC
SK
Zasilanie
3 x 400 V
50 Hz
Alarm
RA
EMG
OFF
ON
MC
Serwowzmacniacz
EMG
Servo ON
*
* (Logika sink)
L1
L2
L3
Transformator
U
1
/U
2
= 400 V/230 V
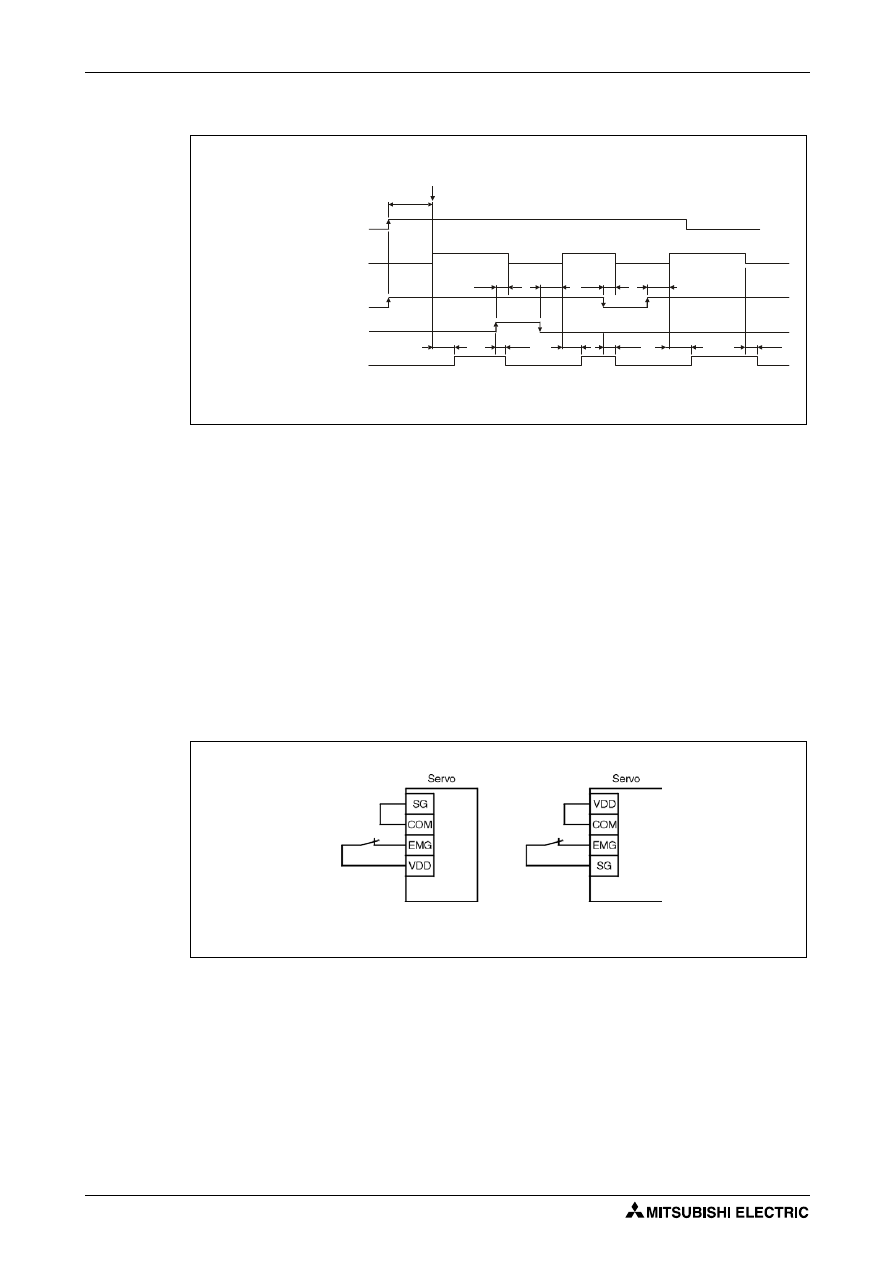
Podłączanie
Zasilanie
3 - 30
Przebiegi czasowe
Wyłącznik awaryjny i zatrzymanie awaryjne
Dla zapewnienia bezpieczeństwa należy bezwzględnie przygotować wyłącznik bezpieczeńst-
wa ze stykami normalnie zwartymi pomiędzy zaciskami EMG i VDD (logika source) lub EMG i
SG (logika sink) oraz obwód zewnętrzny, wyłączający zasilanie główne w chwili wyłączenia sy-
gnału EMG. W chwili wyłączenia sygnału EMG zostaje uruchomiony hamulec dynamiczny,
gwałtownie zatrzymujący serwosilnik. Jednocześnie na wyświetlaczu pojawi się ostrzeżenie o
zatrzymaniu awaryjnym (AL.E6).
Podczas normalnej pracy nie należy używać wyłącznika awaryjnego do zatrzymywania i uru-
chamiania silnika. Może to spowodować skrócenie okresu życia serwowzmacniacza.
Ponadto, jeśli w stanie zatrzymania awaryjnego pozostają podane na wejścia sygnały startu w
prawo (ST1) lub w lewo (ST2) oraz zadający ciąg impulsów, serwosilnik zostanie uruchomiony
gdy tylko przywrócony zostanie sygnał EMG. Należy zapewnić skasowanie sygnałów zadawa-
nia przy zatrzymaniu awaryjnym.
S000568C
Rys. 3-24: Przebiegi czasowe załączania zasilania
S000569T
Rys. 3-25: Wyłącznik bezpieczeństwa (EMG)
EIN
(1s)
20ms
20ms
20ms
10ms
10ms
10ms
10ms
60ms
60ms
10ms
EIN
EIN
EIN
EIN
AUS
AUS
AUS
AUS
AUS
Zasilanie
Stopień mocy
Servo ON
(SON)
Reset
(RES)
Ready
(RD)
Logika source
Logika sink
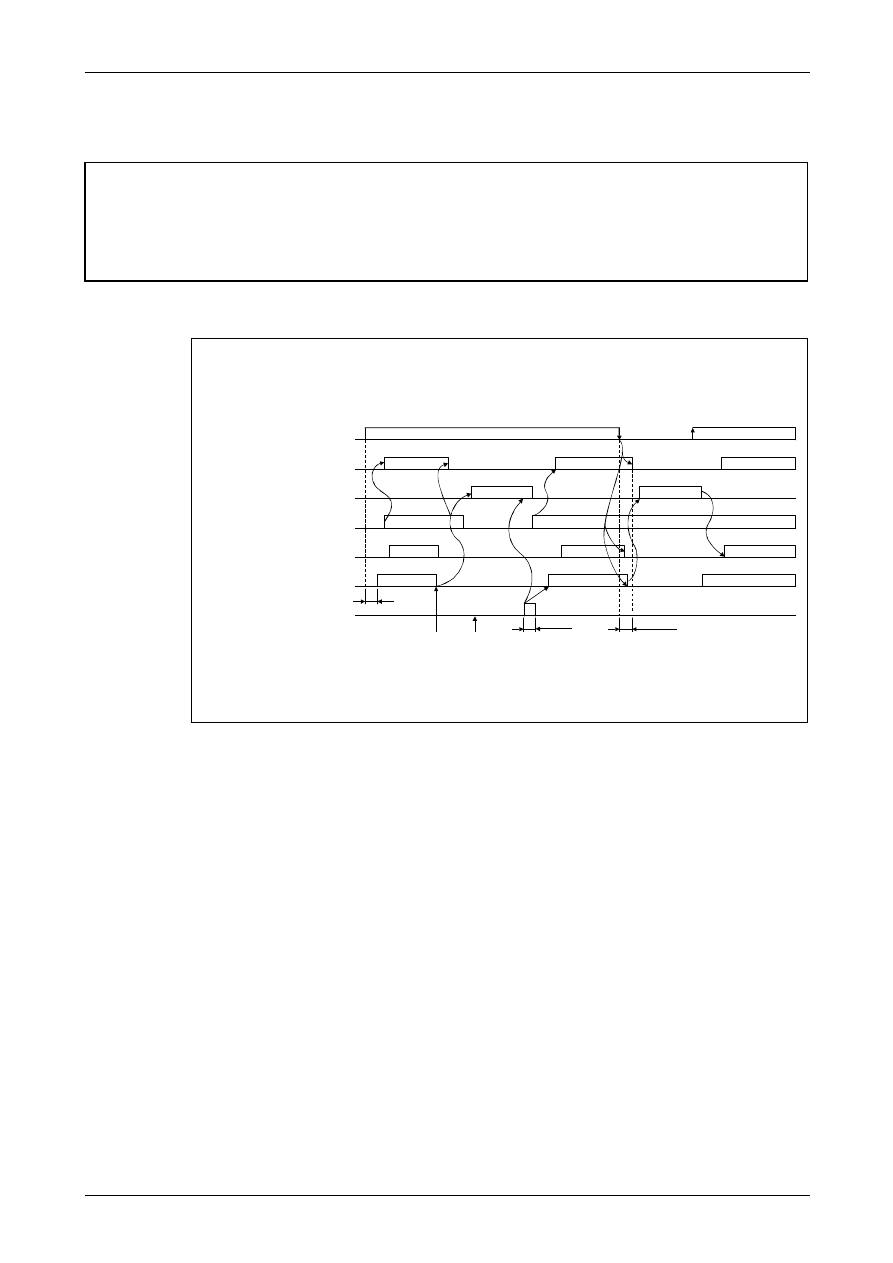
Przebiegi czasowe w stanie alarmu
Podłączanie
MELSERVO J2-Super
3 - 31
3.6
Przebiegi czasowe w stanie alarmu
!
OSTRZEŻENIE:
●
W przypadku wystąpienia alarmu należy przede wszystkim znaleźć i usunąć jego
przyczynę.
●
Przed zresetowaniem alarmu i wznowieniem pracy należy upewnić się, czy sygnały
sterujące nie pozostały załączone i czy uruchomienie serwosilnika jest bezpieczne.
S000862C
Rys. 3-26: Przebiegi czasowe w stanie alarmu
W przypadku wystąpienia alarmu w serwowzmacniaczu zostaje odcięte sterowanie tranzys-
torów mocy i silnik hamuje wybiegiem. Wyłączenie zasilania obwodu mocy musi być
zapewnione przez zewnętrzne urządzenia.
Alarm jest resetowany przez wyłączenie i załączenie zasilania obwodów sterowania, wciśnięcie
klawisza SET przy wyświetlonym komunikacie alarmu, lub podanie sygnału resetu (RES).
Jeżeli przyczyna alarmu nie została usunięta, alarm nie zostanie zresetowany lub pojawi się
ponownie.
EIN
AUS
EIN
AUS
aktiv
inaktiv
EIN
AUS
EIN
AUS
EIN
AUS
EIN
1 s
≥ 50 ms
≥ 60 ms
AUS
Zasilanie
Sterowanie stopnia mocy
Hamowanie dynamiczne
Servo ON
(SON)
Ready
(RD)
Alarm
(ALM)
Reset
(RES)
Hamowanie
Hamowanie
Alarm
Usunięcie przyczyny alarmu
Brak zasilania
Zasilanie załączone
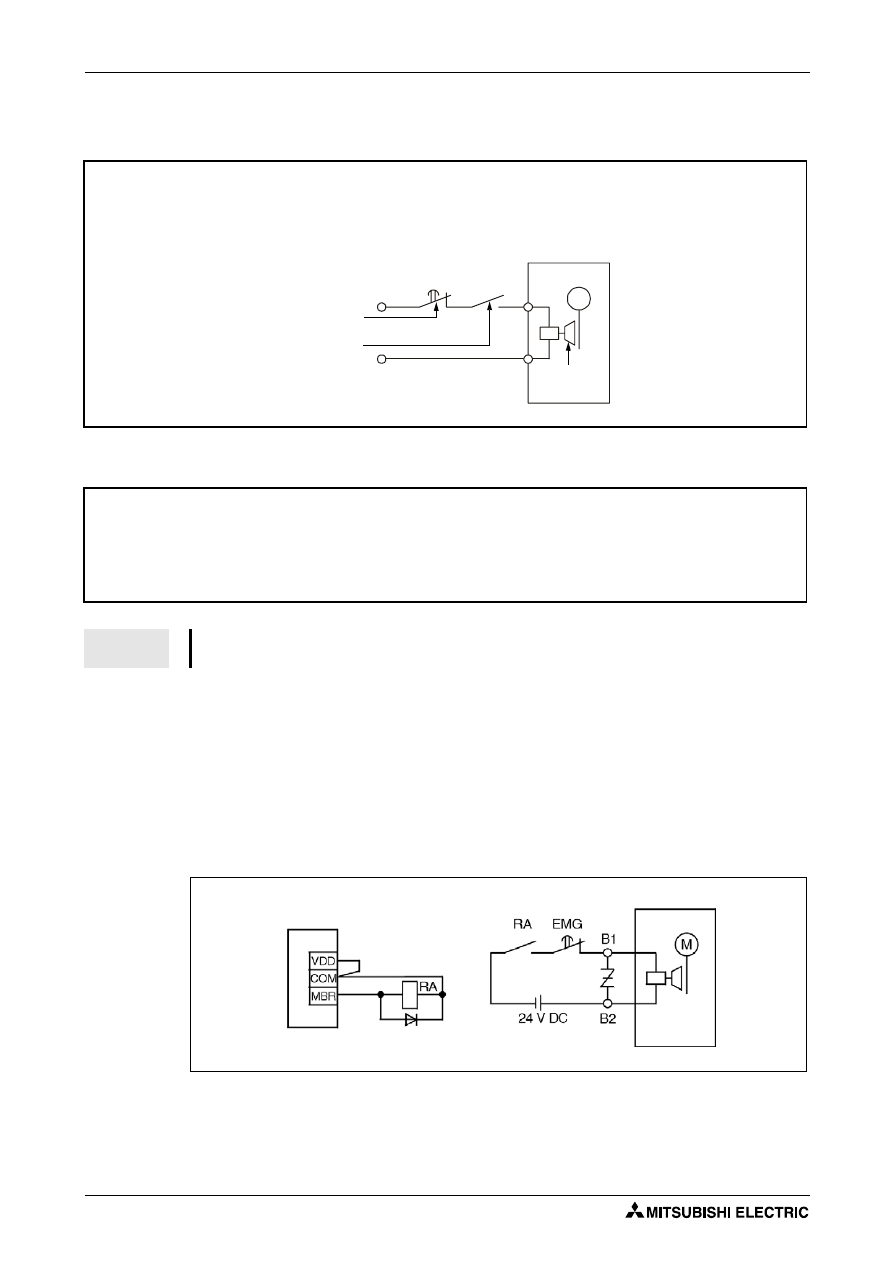
Podłączanie
Serwosilnik z luzownikiem elektromagnetycznym
3 - 32
3.7
Serwosilnik z luzownikiem elektromagnetycznym
Schemat podłączania
1) Wpisz wartość xx1x w parametrze Pr. 1, by umożliwić stosowanie blokady luzownika (MBR).
Należy pamiętać, że niedostępny staje się sygnał prędkości zero (ZSP).
2) Nie należy łączyć obwodów zasilania 24VDC interfejsów serwowzmacniacza i luzownika.
Zawsze używaj odrębnego zasilacza do zasilania luzownika.
3) Luzownik zadziała (zaciśnie się) w przypadku wyłączenia zasilania 24VDC.
4) Przy włączonym sygnale resetu (RES) obwody bazowe są odcięte. W przypadku napędów
dźwigowych itp. należy używać sygnału blokady luzownika (MBR).
5) Sygnał servo-on (SON) należy wyłączać po zatrzymaniu serwosilnika.
!
OSTRZEŻENIE:
●
Obwód sterowania luzownikiem należy skonfigurować w taki sposób, by luzownik
był sterowany nie tylko przez sygnały z serwowzmacniacza, lecz także przez
zewnętrzny wyłącznik awaryjny.
!
OSTRZEŻENIE:
●
Luzownik służy do utrzymywania silnika w stanie zatrzymanym i nie może być
używany do jego hamowania lub zatrzymywania w normalnym cyklu pracy. Nadmi-
ernie częste używanie luzownika np. poprzez nieuzasadnione używanie wyłącznika
awaryjnego do zatrzymywania napędu może spowodować uszkodzenie luzownika.
UWAGA:
Dane techniczne luzownika, np. moc źródła zasilania i czas zwłoki zadziałania zawiera
podręcznik obsługi serwosilników.
S000572T
Rys. 3-27: Schemat połączeń
M
EMG
RA
Luzownik
elektromagnetyczny
Servomotor
Wyłącznik awaryjny (EMG)
Styk musi być rozwarty w stanach: servo-
off (tj. brak sygnału SON), alarmu (ALM)
oraz blokady luzownika (MBR)
Serwowzmacniacz
Serwosilnik
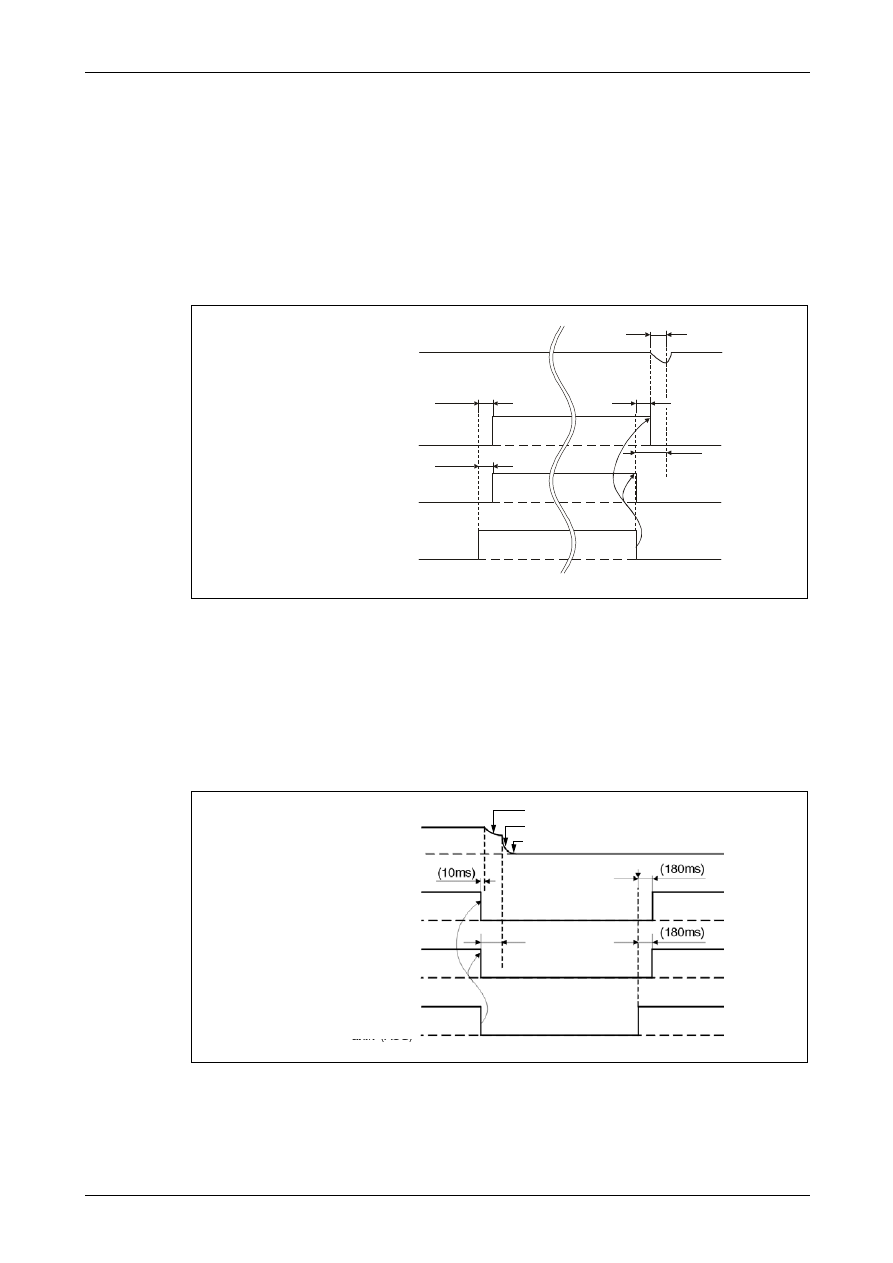
Serwosilnik z luzownikiem elektromagnetycznym
Podłączanie
MELSERVO J2-Super
3 - 33
Wartości parametrów
1) Wpisz wartość xx1x w parametrze Pr. 1, by umożliwić stosowanie blokady luzownika (MBR).
2) Przy użyciu parametru Pr. 33 (sekwencja sterowania luzownikiem) ustaw czas zwłoki (Tb)
w stanie servo-off od chwili zadziałania luzownika do odcięcia obwodów bazowych, zgodnie
z przebiegami czasowymi pokazanymi na Rys. 3-28.
3) Przy użyciu parametru Pr. 24 określ prędkość, poniżej której w stanie alarmu lub zatrzyma-
nia awaryjnego zostanie wysterowany luzownik.
Przebiegi czasowe
S000801C
Rys. 3-28: Przełączanie ON/OFF sygnału servo-on (SON)
Po upływie czasu Tb od wyłączenia sygnału servo-on (SON) wyłączany jest servo-lock i wał ser-
wosilnika jest zwalniany. Jeżeli luzownik jest zaciśnięty w stanie servo-lock, jego czas życia
może zostać skrócony. Tak więc, gdy luzownik jest używany np. w napędzie dźwigowym, należy
ustawić wartość Tb bliską czasowi zwłoki zadziałania luzownika, by zapobiec opadaniu ob-
ciążenia.
S000802T
Rys. 3-29: Przełączanie ON/OFF sygnału wyłącznika awaryjnego (EMG)
(60ms)
Tb
0 U/min
EIN
inaktiv (EIN)
EIN
AUS
aktiv (AUS)
AUS
(80ms)
Prędkość silnika
Obwody mocy
Blokada luzownika
(MBR)
Servo ON
(SON)
Czas zwłoki
zadziałania luzownika
Bieg luzem
Prędkość silnika
Obwody mocy
Blokada luzownika
(MBR)
Wyłącznik awaryjny
(EMG)
Hamulec dynamiczny
Hamulec dynamiczny i luzownik elektromagn.
Luzownik elektromagnetyczny
Luzownik elektromag-
netyczny zwolniony
Zwłoka zadziałania luzownika
elektromagnetycznego
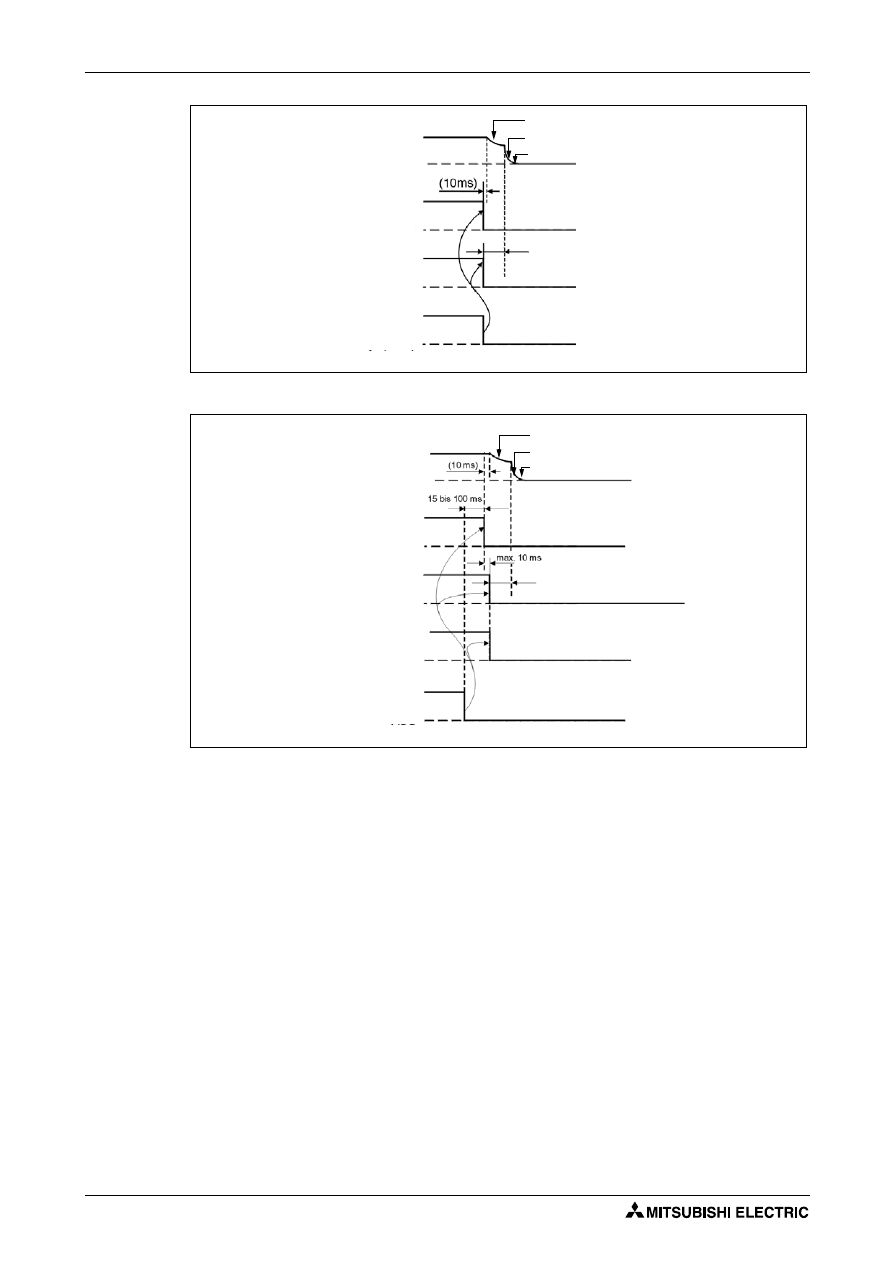
Podłączanie
Serwosilnik z luzownikiem elektromagnetycznym
3 - 34
S000803T
Rys. 3-30: Wystąpienie alarmu
S000804T
Rys. 3-31: Jednoczesne wyłączenie zasilania obwodów mocy i sterowania
Prędkość silnika
Obwody mocy
Blokada luzownika
(MBR)
Alarm
(ALM)
Zwłoka zadziałania luzownika elek-
tromagnetycznego
Hamulec dynamiczny
Hamulec dynamiczny i luzownik elektromagn.
Luzownik elektromagnetyczny
Zwłoka zadziałania luzownika elektro-
magnetycznego
Hamulec dynamiczny
Hamulec dynamiczny i luzownik elektromagn.
Luzownik elektromagnetyczny
Prędkość silnika
Obwody mocy
Blokada luzownika
(MBR)
Alarm
(ALM)
Zasilanie obwodów
mocy i sterowania
Czas zależny od aktualnego trybu pracy
serwonapędu
Jeżeli zasilanie główne zostaje wyłączone przy zatrzymanym
silniku, a sygnał SON jest podany, pojawia się ostrzeżenie
wyłączenia zasilania głównego (A.E9), a sygnał alarmu
pozostaje w stanie wysokim.
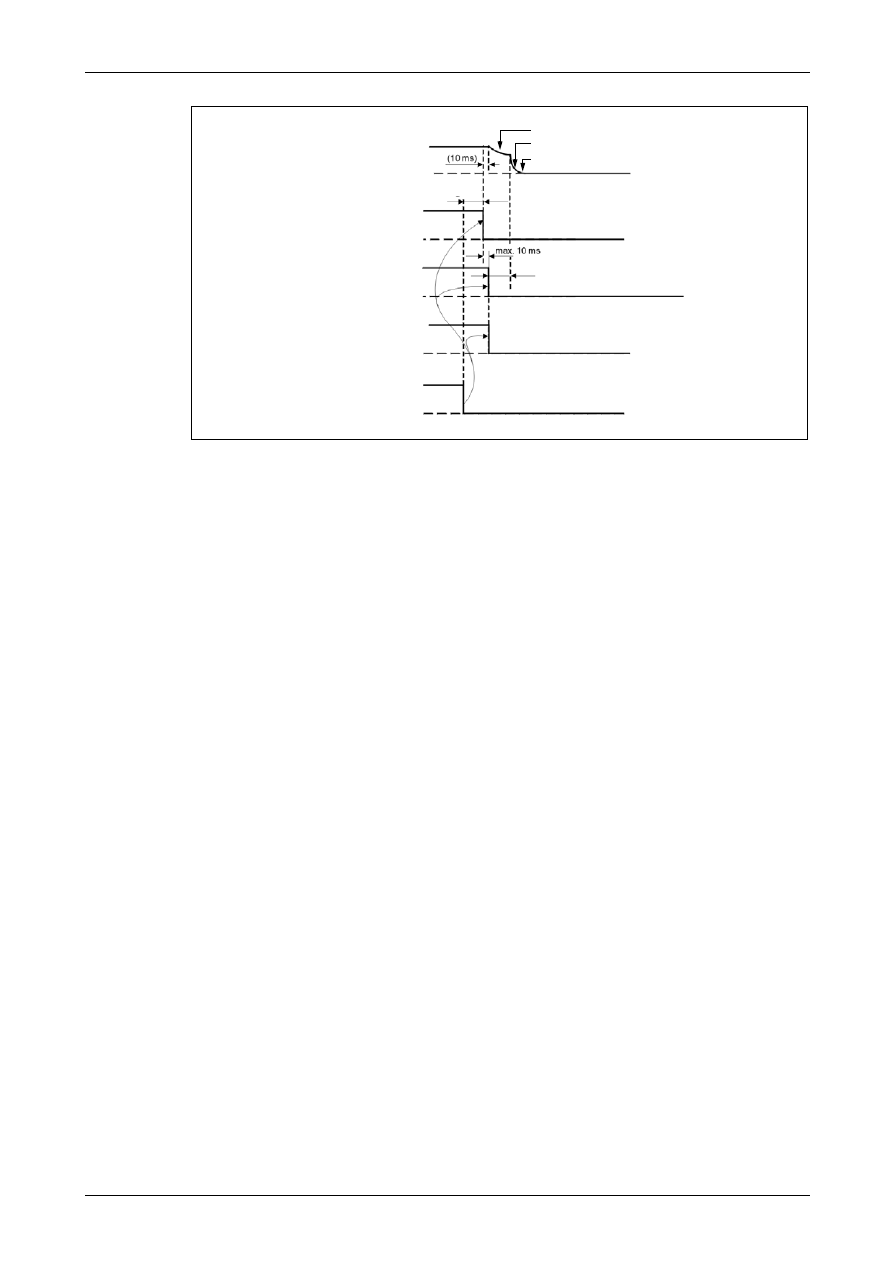
Serwosilnik z luzownikiem elektromagnetycznym
Podłączanie
MELSERVO J2-Super
3 - 35
S000899T
Rys. 3-32: Wyłączenie tylko zasilania głównego (zasilanie obwodów sterowania pozostaje
załączone)
Czas zwłoki zadziałania luzownika
elektromagnetycznego
Hamulec dynamiczny
Hamulec dynamiczny i luzownik elektromagn.
Luzownik elektromagnetyczny
Prędkość silnika
Obwody mocy
Blokada luzownika
(MBR)
Alarm
(ALM)
Zasilanie obwodu
mocy
Czas zależny od aktualnego trybu pracy
serwonapędu (15ms lub więcej)
Jeżeli zasilanie główne zostaje wyłączone przy zatrzymanym
silniku, a sygnał SON jest podany, pojawia się ostrzeżenie
wyłączenia zasilania głównego (A.E9), a sygnał alarmu
pozostaje w stanie wysokim.
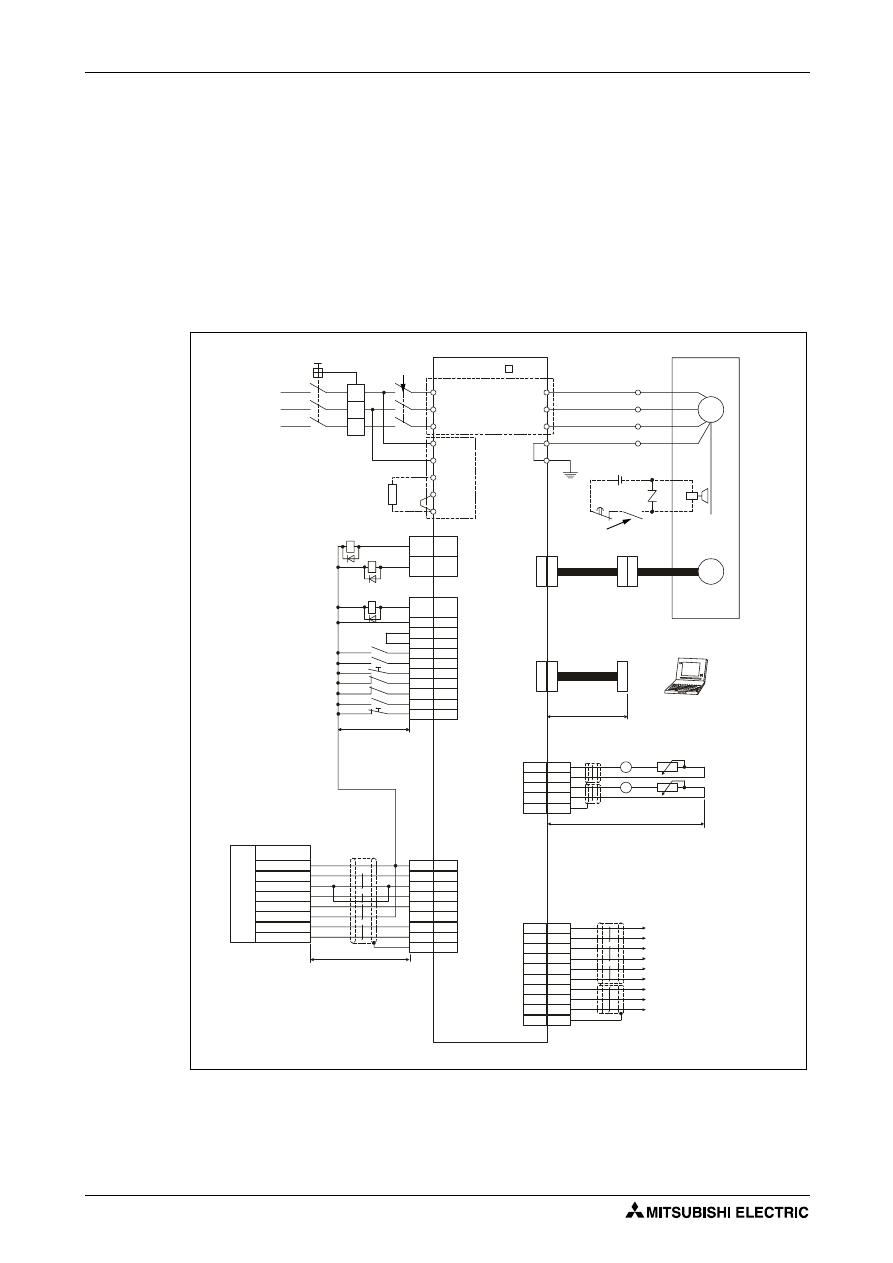
Podłączanie
Typowe przykłady schematu połączeń
3 - 36
3.8 Typowe
przykłady schematu połączeń
Poniżej przedstawiono przykładowe schematy połączeń serwowzmacniacza w typowych ap-
likacjach serwonapędu.
3.8.1 Przykładowe schematy połączeń dla trybu
pozycjonowania
Poniżej przedstawiono typowe schematy połączeń serwowzmacniacza, pracującego w trybie
pozycjonowania z użyciem modułu pozycjonującego FX2N-1PG, w logice source i sink
S000850C
Rys. 3-33: Przykładowy schemat połączeń dla trybu pozycjonowania, przy logice source na
wejściach i sink na wyjściach
RD
INP
ALM
4
3
14
13
Geh.
19
18
18
VDD
3
COM 13
SG
10
PC
8
SON
5
RES
14
LSP
16
LSN
17
TL
9
EMG
15
MO1
LG
MO2
LG
SD
CN1A
CN1B
CN2
CN3
CN3
10k
Ω
10k
Ω
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
CN1A
P
D
C
L21
PE
L11
PE
L3
W
L3
L2
V
L2
L1
TE1
TE
2
U
L1
I>
I>
I>
Signal
FX
2N
-1
P
G
P
o
si
tio
nie
re
in
h
ei
t
VIN
FP
COM 0
RP
COM 1
CLR
PG 0+
PG 0-
OPC
PP
SG
NP
CR
P15R
OP
SD
11
3
10
2
8
4
14
Geh.
CN1A
M
En
koder
Ser
wosilnik
24 V DC
EMG
B2
B1
A
A
RA1
RA2
RA3
≤
10 m
≤
10 m
≤2
m
≤2
m
≤15
m
MR-J2S- A
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Regulacja proporcjonalna
Servo ON
Reset
7 Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Ograniczenie momentu
Wyłącznik awaryjny 3/7
Sygnał gotowości
Pozycjonowanie wykonane
(INP)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
K
PC
Rozłączany
sygnałem ALM i
EMG
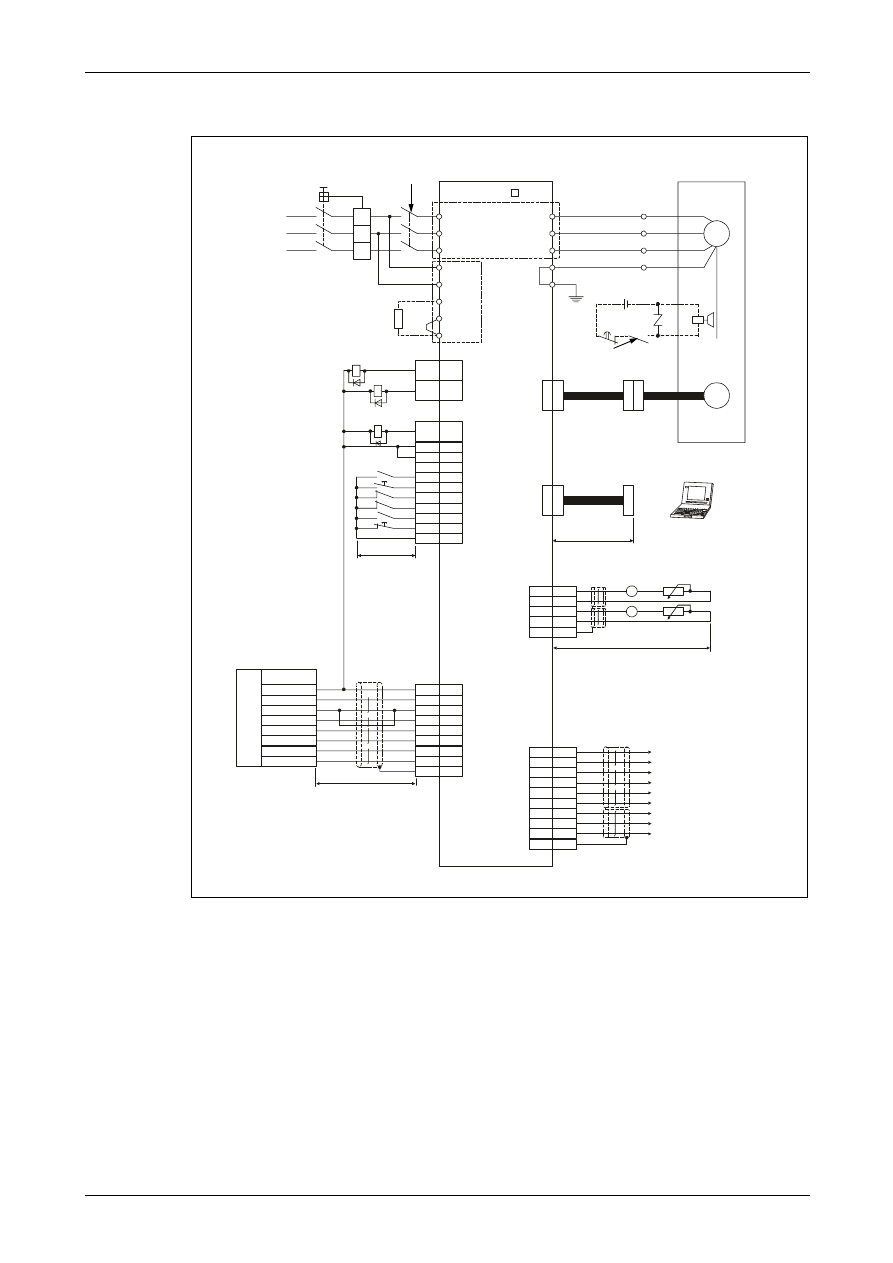
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 37
S000851C
Rys. 3-34: Przykładowy schemat połączeń dla trybu pozycjonowania, przy logice sink na
wejściach i wyjściach
RD
INP
ALM
4
3
14
13
Geh.
19
18
18
VDD
3
COM 13
PC
8
SON
5
RES
14
LSP
16
LSN
17
TL
9
EMG
15
SG
10
MO1
LG
MO2
LG
SD
CN1A
CN1B
CN2
CN3
CN3
10k
Ω
10k
Ω
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
CN1A
P
D
C
L21
PE
L11
PE
L3
W
L3
L2
V
L2
L1
TE1
TE
2
U
L1
I>
I>
I>
Signal
FX
2N
-1
P
G
P
o
si
tio
nie
re
in
h
ei
t
VIN
FP
COM 0
RP
COM 1
CLR
PG 0 +
PG 0-
OPC
PP
SG
NP
SG
CR
P15R
OP
SD
11
3
10
2
20
8
4
14
Geh.
CN1A
24 V DC
M
Encoder
Servomotor
A
A
RA1
RA2
RA3
≤
10 m
≤2
m
24 V DC
EMG
B2
B1
≤2
m
≤15
m
MR-J2S- A
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Servo ON
Reset
7 Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Ograniczenie momentu
Wyłącznik awaryjny 3/7
Sygnał gotowości
Pozycjonowanie wykonane
(INP)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
K
PC
Rozłączany
sygnałem ALM i
EMG

Podłączanie
Typowe przykłady schematu połączeń
3 - 38
Uwagi do Rys. 3-33 i Rys. 3-34
D Przedstawiony sposób podłączania zacisków zewnętrznego opornika hamującego dotyczy
serwowzmacniaczy MR-J2S-350A i poniżej. Opis dotyczący pozostałych modeli przedsta-
wiono w Tab. 3-3.
E Złącza CN1A, CN1B, CN2 i CN3 mają identyczny kształt. Należy zachować uwagę przy
podłączaniu, gdyż błędne podłączenie wtyków może spowodować zwarcie i uszkodzenie
serwowzmacniacza.
F Łączny prąd, pobierany przez zewnętrzne przekaźniki nie może przekraczać 80mA. Jeżeli
wymagana jest wyższa wartość, należy zastosować zewnętrzny zasilacz.
G Abu uzyskać stan gotowości do pracy, konieczne jest załączenie sygnału z wyłącznika
awaryjnego (EMG) oraz sygnałów LSN i LSP.
H Styki o jednakowych oznaczeniach są zwarte ze sobą wewnątrz serwowzmacniacza.
I Dla bezpieczeństwa sygnał wyjściowy alarmu (ALM) jest podczas normalnej pracy (bez
alarmu) w stanie wysokim (zwarty z COM). Sygnał alarmu (stan niski na wyjściu ALM) musi
powodować zatrzymanie serwonapędu przez sekwencję sterowania.
J Dotyczy tylko serwosilników z luzownikiem elektromagnetycznym.
K Podana długość dotyczy sterowania ciągiem impulsów w układzie z otwartym kolektorem.
W przypadku użycia sterownika linii różnicowej maksymalna długość wynosi 10m.
!!!
ZAGROŻENIE:
●
Serwowzmacniacz i serwosilnik muszą być uziemione w niezawodny sposób.
●
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z uzie-
mieniem ochronnym szafy sterowniczej.
!
OSTRZEŻENIE:
●
Diody bocznikujące obciążenie przekaźniki DC muszą być podłączone z zacho-
waniem prawidłowej biegunowości. W przeciwnym wypadku sterowany obwód nie
będzie działać, a serwowzmacniacz może ulec uszkodzeniu.
●
Bezwzględnie konieczne jest zainstalowanie wyłącznika bezpieczeństwa (EMG -
styk normalnie zwarty).
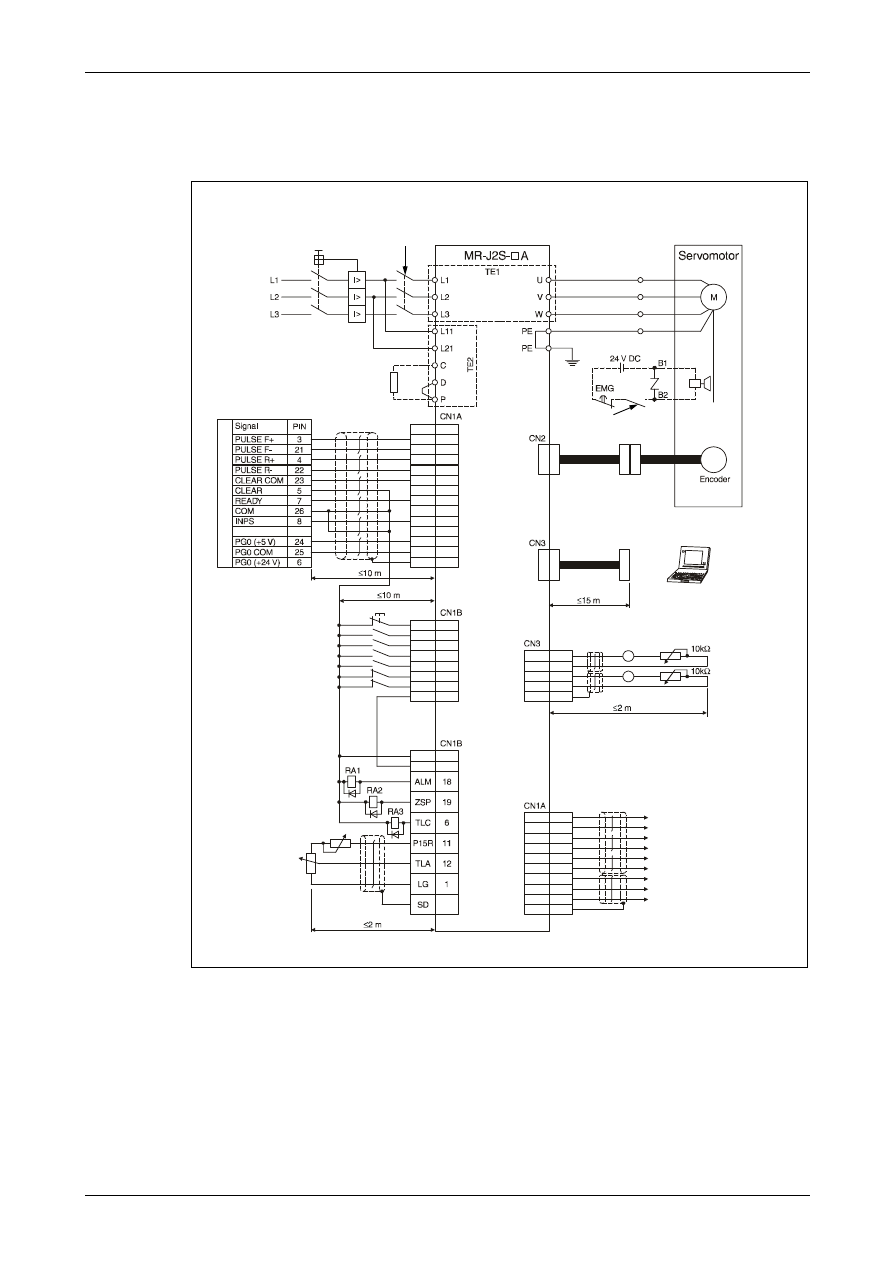
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 39
Poniższe schematy odpowiadają systemowi pozycjonowania z użyciem modułu pozyc-
jonującego AD75Pm lub A1SD75Pm z serii MELSEC A- lub AnS-.
S000852C
Rys. 3-35: Przykładowy schemat połączeń dla trybu pozycjonowania, przy logice source na
wejściach, sink na wyjściach i zasilaniu wewnętrznym
OPC
EMG
VDD
PP
SON
COM
PG
RES
NP
PC
4
NG
TL
3
CR
LSP
14
SG
LSN
13
RD
SG
Geh.
COM
INP
OPC
LZ
LZR
SD
11
15
3
A
D
75
P/
S
D
75P
P
o
si
tio
n
ier
ei
n
hei
t
3
5
13
13
14
2
8
MO1
12
9
LG
8
16
MO2
10
17
LG
19
10
SD
9
18
OPC
5
15
Geh.
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
A
A
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik bezpieczeństwa3/7
Servo ON
Reset
Regulacja proporcjonalna
Ograniczenie momentu
7Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Alarm 9
Prędkość zero
Ograniczenie momentu
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe ograni-
czenie momentu
±10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
K
PC
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
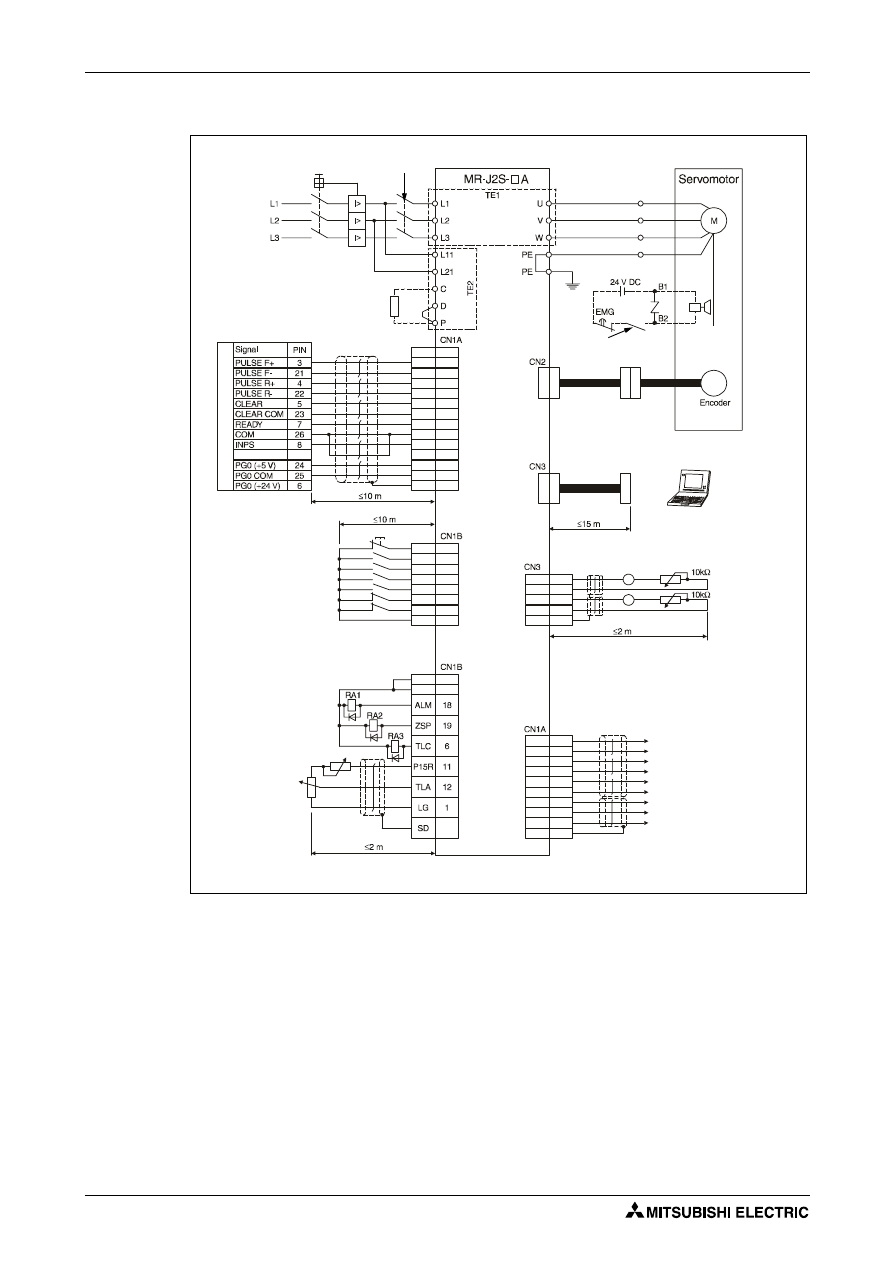
Podłączanie
Typowe przykłady schematu połączeń
3 - 40
S000853C
Rys. 3-36: Przykładowy schemat połączeń dla trybu pozycjonowania, przy logice sink na
wejściach i wyjściach i zasilaniu wewnętrznym
OPC
EMG
VDD
PP
SON
COM
PG
RES
NP
PC
4
NG
TL
3
CR
LSP
14
SG
LSN
13
RD
SG
Geh.
COM
INP
OPC
LZ
LZR
SD
11
15
3
AD
75
P/
A1
SD
75
P
P
o
si
tio
n
ier
ei
n
hei
t
3
5
13
13
14
2
8
MO1
12
9
LG
8
16
MO2
10
17
LG
19
10
SD
9
18
OPC
5
15
Geh.
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
A
A
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik bezpieczeństwa 3/7
Servo ON
Reset
Regulacja proporcjonalna
Ograniczenie momentu
7Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Alarm 9
Prędkość zero
Ograniczenie momentu
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe ograni-
czenie momentu
±10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
K
PC
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 41
Uwagi do Rys. 3-35 i Rys. 3-36
D Przedstawiony sposób podłączania zacisków zewnętrznego opornika hamującego dotyczy
serwowzmacniaczy MR-J2S-350A i poniżej. Opis dotyczący pozostałych modeli przedsta-
wiono w Tab. 3-3.
E Złącza CN1A, CN1B, CN2 i CN3 mają identyczny kształt. Należy zachować uwagę przy
podłączaniu, gdyż błędne podłączenie wtyków może spowodować zwarcie i uszkodzenie
serwowzmacniacza.
F Łączny prąd, pobierany przez zewnętrzne przekaźniki nie może przekraczać 80mA. Jeżeli
wymagana jest wyższa wartość, należy zastosować zewnętrzny zasilacz.
G Abu uzyskać stan gotowości do pracy, konieczne jest załączenie sygnału z wyłącznika
awaryjnego (EMG) oraz sygnałów LSN i LSP.
H Styki o jednakowych oznaczeniach są zwarte ze sobą wewnątrz serwowzmacniacza.
I Dla bezpieczeństwa sygnał wyjściowy alarmu (ALM) jest podczas normalnej pracy (bez
alarmu) w stanie wysokim (zwarty z COM). Sygnał alarmu (stan niski na wyjściu ALM) musi
powodować zatrzymanie serwonapędu przez sekwencję sterowania.
J Dotyczy tylko serwosilników z luzownikiem elektromagnetycznym.
K Podana długość dotyczy sterowania ciągiem impulsów w układzie ze sterownikiem linii
różnicowej. W przypadku użycia układu z otwartym kolektorem maksymalna długość wynosi
2m.
!!!
OSTRZEŻENIE:
●
Serwowzmacniacz i serwosilnik muszą być uziemione w niezawodny sposób.
●
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z uzie-
mieniem ochronnym szafy sterowniczej.
!
OSTRZEŻENIE:
●
Diody bocznikujące obciążenie przekaźniki DC muszą być podłączone z zacho-
waniem prawidłowej biegunowości. W przeciwnym wypadku sterowany obwód nie
będzie działać, a serwowzmacniacz może ulec uszkodzeniu.
●
Bezwzględnie konieczne jest zainstalowanie wyłącznika bezpieczeństwa (EMG -
styk normalnie zwarty).
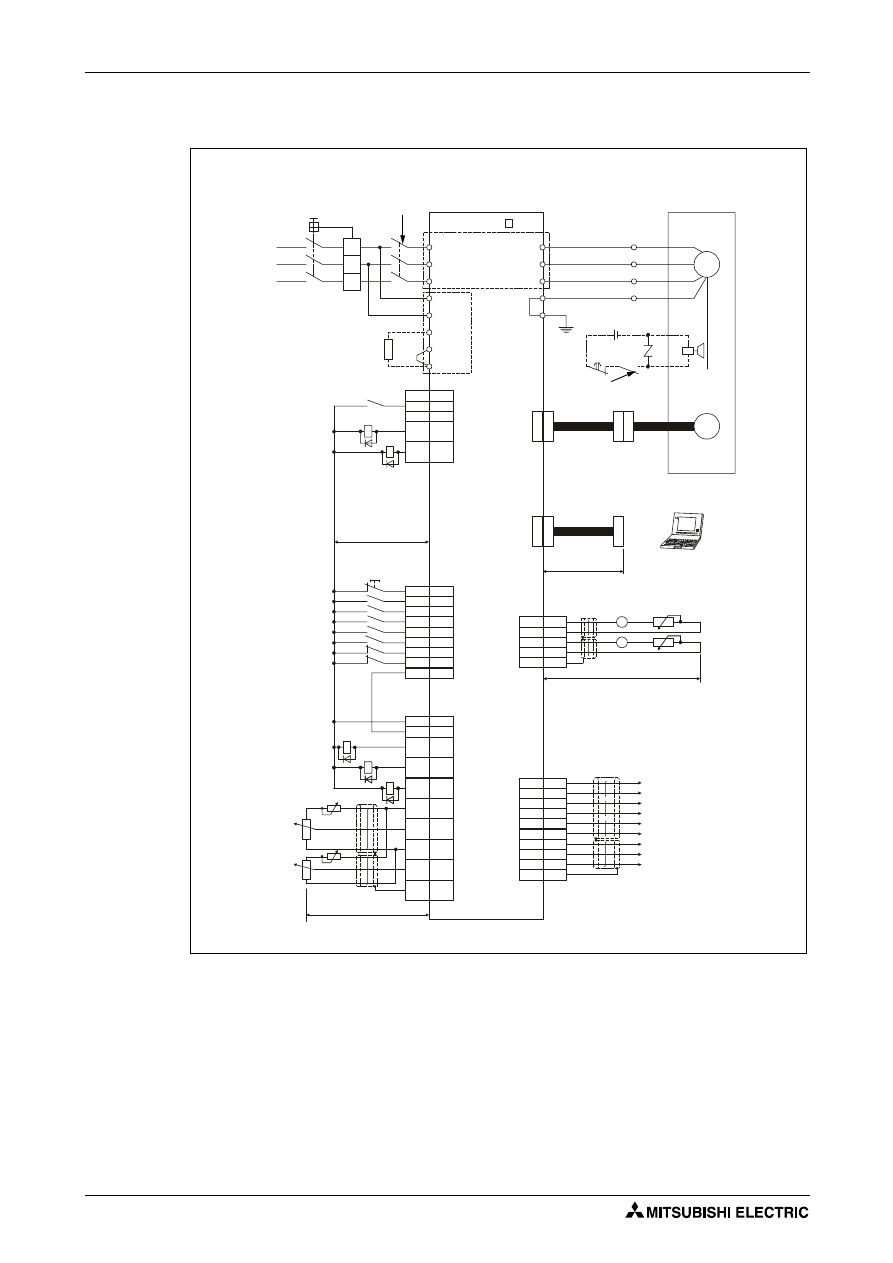
Podłączanie
Typowe przykłady schematu połączeń
3 - 42
3.8.2 Przykładowe schematy połączeń dla trybu regulacji prędkości
S000854C
Rys. 3-37: Przykładowy schemat połączeń dla trybu regulacji prędkości, przy logice source na
wejściach i sink na wyjściach
COM
EMG
VDD
SP1
SON
COM
SG
RES
ALM
ZSP
TLC
P15R
VC
LG
TLA
SD
RD
SA
SP2
4
ST1
3
ST2
14
LSP
LSN
13
Geh.
9
15
3
8
5
13
10
14
18
19
6
11
2
1
12
Geh.
19
18
7
MO1
8
LG
9
MO2
16
17
LG
SD
CN1A
CN2
CN3
CN1B
CN3
10k
Ω
10k
Ω
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
CN1A
CN1B
RA1
P
D
C
L21
PE
L11
PE
L3
W
L3
L2
V
L2
L1
TE1
TE
2
U
L1
I>
I>
I>
SG
10
M
Encoder
Servomotor
MR-J2S- A
A
A
RA2
RA3
RA2
RA3
RA5
RA4
24 V DC
EMG
B2
B1
≤2
m
≤15
m
≤10
m
≤2
m
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik bezpieczeństwa3/7
Servo ON
Reset
Prędkość zaprogramowana 2
Start w prawo
Start w lewo
7Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Alarm 9
Prędkość zero
Ograniczenie momentu
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe
zadawanie prędkości
±10 V/max.
PC
Prędkość zaprogramowana 1
Sygnał gotowości
Prędkość osiągnięta
Analogowe ograni-
czenie momentu K
±10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
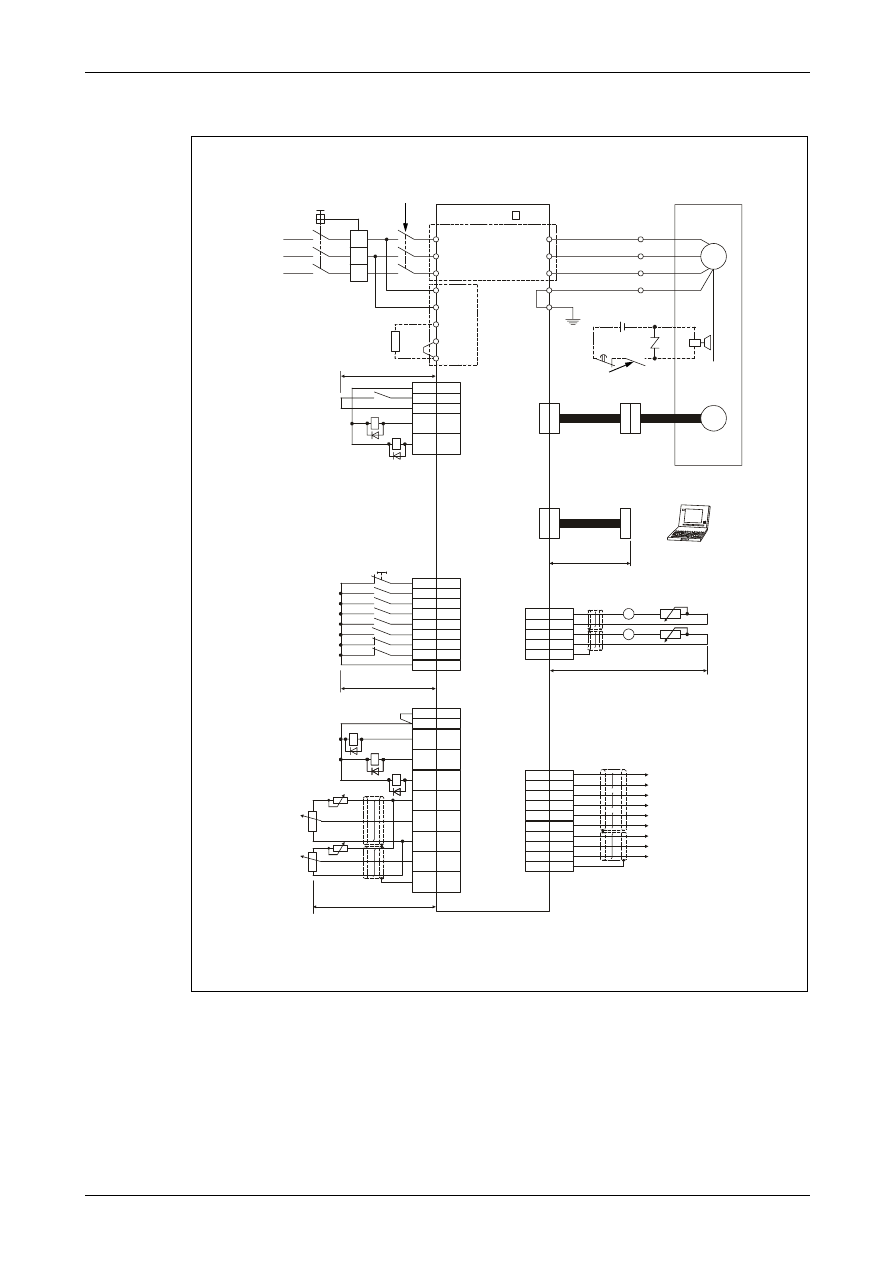
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 43
S000855C
Rys. 3-38: Przykładowy schemat połączeń dla trybu regulacji prędkości, przy logice sink na
wejściach i wyjściach
COM
EMG
VDD
SP1
SON
COM
SG
RES
ALM
ZSP
TLC
P15R
VC
LG
TLA
SD
RD
SA
SP2
4
ST1
3
ST2
14
LSP
LSN
13
Geh.
9
15
3
8
5
13
10
14
18
19
6
11
2
1
12
Geh.
19
18
7
MO1
8
LG
9
MO2
16
17
LG
SD
CN1A
CN2
CN3
CN1B
CN3
10k
Ω
10k
Ω
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
CN1A
CN1B
RA1
P
D
C
L21
PE
L11
PE
L3
W
L3
L2
V
L2
L1
TE1
TE
2
U
L1
I>
I>
I>
SG
10
M
Encoder
Servomotor
MR-J2S- A
A
A
RA2
RA3
RA2
RA3
RA5
RA4
24 V DC
EMG
B2
B1
≤2
m
≤15
m
≤10
m
≤10
m
≤2
m
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik bezpieczeństwa3/7
Servo ON
Reset
Prędkość zaprogramowana 2
Start w prawo
Start w lewo
7Wyłącznik krańcowy (w prawo)
Wyłącznik krańcowy (w lewo)
Alarm 9
Prędkość zero
Ograniczenie momentu
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe
zadawanie prędkości
±10 V/max.
PC
Prędkość zaprogramowana 1
Sygnał gotowości
Prędkość osiągnięta
Analogowe ograni-
czenie momentu K
±10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8

Podłączanie
Typowe przykłady schematu połączeń
3 - 44
Uwagi do Rys. 3-37 i Rys. 3-38
D Przedstawiony sposób podłączania zacisków zewnętrznego opornika hamującego dotyczy
serwowzmacniaczy MR-J2S-350A i poniżej. Opis dotyczący pozostałych modeli przedsta-
wiono w Tab. 3-3.
E Złącza CN1A, CN1B, CN2 i CN3 mają identyczny kształt. Należy zachować uwagę przy
podłączaniu, gdyż błędne podłączenie wtyków może spowodować zwarcie i uszkodzenie
serwowzmacniacza.
F Łączny prąd, pobierany przez zewnętrzne przekaźniki nie może przekraczać 80mA. Jeżeli
wymagana jest wyższa wartość, należy zastosować zewnętrzny zasilacz.
G Abu uzyskać stan gotowości do pracy, konieczne jest załączenie sygnału z wyłącznika
awaryjnego (EMG) oraz sygnałów LSN i LSP.
H Styki o jednakowych oznaczeniach są zwarte ze sobą wewnątrz serwowzmacniacza.
I Dla bezpieczeństwa sygnał wyjściowy alarmu (ALM) jest podczas normalnej pracy (bez
alarmu) w stanie wysokim (zwarty z COM). Sygnał alarmu (stan niski na wyjściu ALM) musi
powodować zatrzymanie serwonapędu przez sekwencję sterowania.
J Dotyczy tylko serwosilników z luzownikiem elektromagnetycznym.
K Analogowe ograniczenie momentu (TLA) jest dostępne po uaktywnieniu z użyciem jednego
z Parametrów Pr. 43 do Pr. 48 funkcji ograniczenia momentu (TL).
!!!
OSTRZEŻENIE:
●
Serwowzmacniacz i serwosilnik muszą być uziemione w niezawodny sposób.
●
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z uzie-
mieniem ochronnym szafy sterowniczej.
!
OSTRZEŻENIE:
●
Diody bocznikujące obciążenie przekaźniki DC muszą być podłączone z zacho-
waniem prawidłowej biegunowości. W przeciwnym wypadku sterowany obwód nie
będzie działać, a serwowzmacniacz może ulec uszkodzeniu.
●
Bezwzględnie konieczne jest zainstalowanie wyłącznika bezpieczeństwa (EMG -
styk normalnie zwarty).
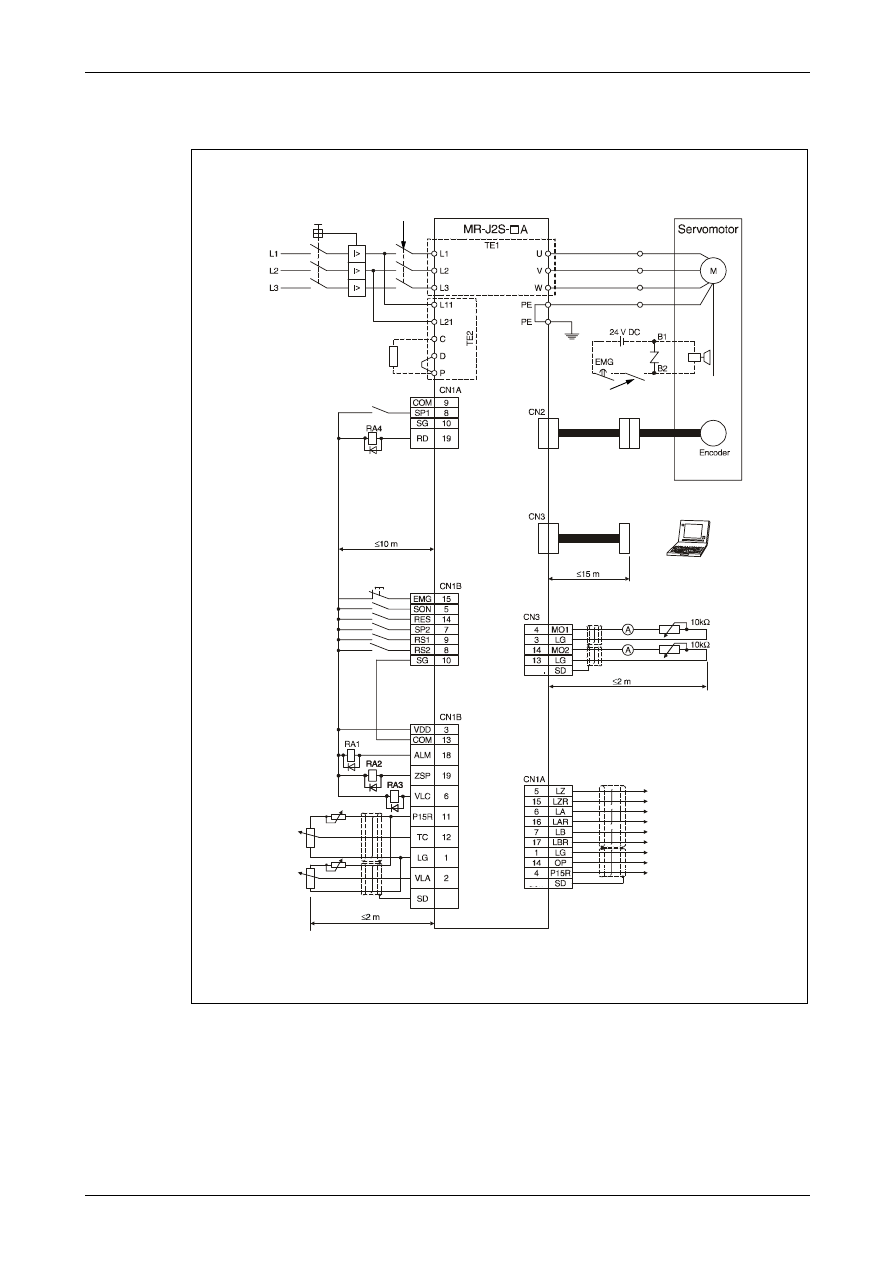
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 45
3.8.3 Przykładowe schematy połączeń dla trybu regulacji momentu
S000856C
Rys. 3-39: Przykładowy schemat połączeń dla trybu regulacji prędkości, przy logice source na
wejściach i sink na wyjściach
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik awaryjny 3/7
Servo ON
Reset
Prędkość zaprogramowana 2
Wybór obrotów w prawo
Wybór obrotów w lewo
Alarm 9
Prędkość zero
Ograniczenie prędości
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe
zadawanie momentu
±8 V/max.
PC
Prędkość zaprogramowana 1
Sygnał gotowości
Analogowe ograni-
czenie prędkości
0–+10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
Zasilanie
3x200V,50Hz
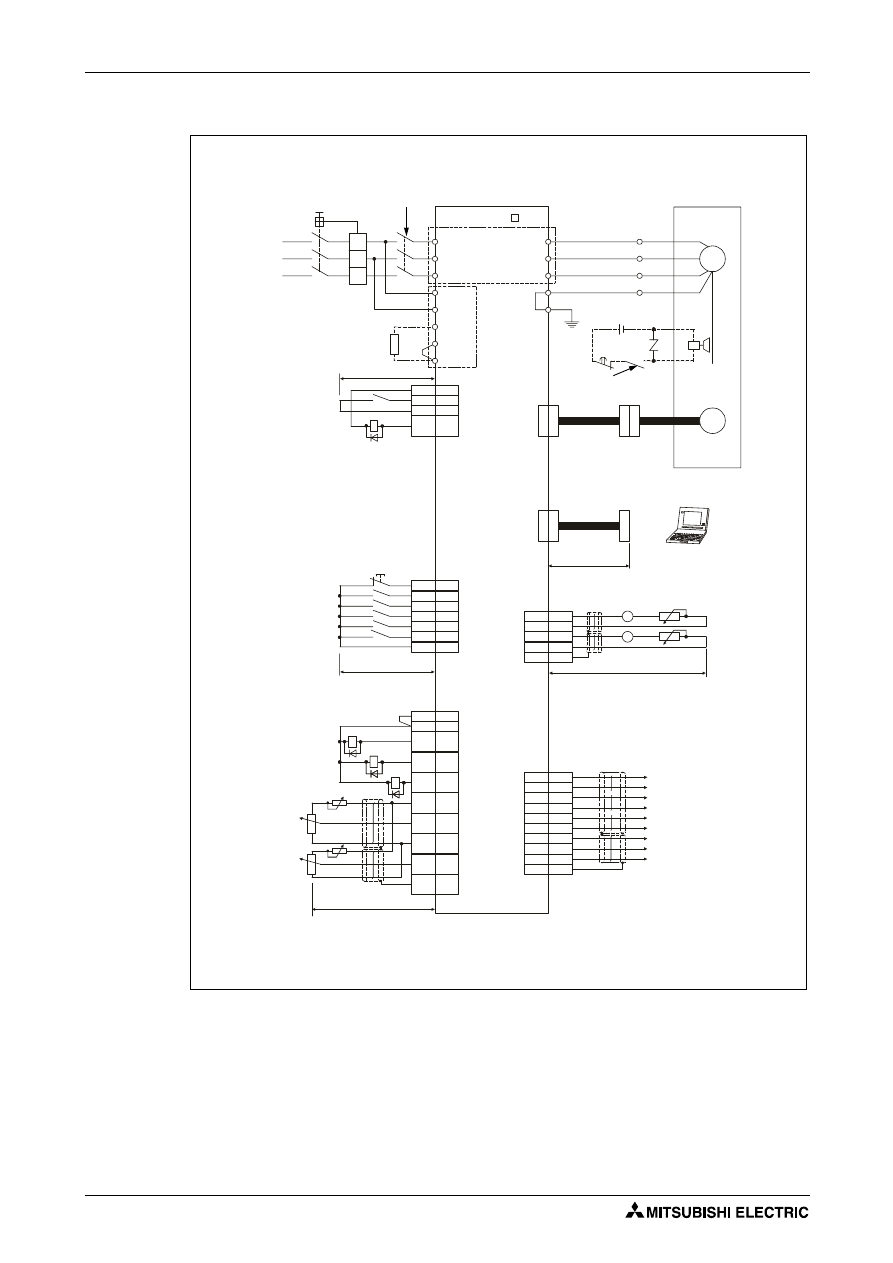
Podłączanie
Typowe przykłady schematu połączeń
3 - 46
S000857C
Rys. 3-40: Przykładowy schemat połączeń dla trybu regulacji prędkości, przy logice sink na
wejściach i wyjściach
COM
EMG
VDD
SP1
SON
COM
SG
RES
ALM
ZSP
VLC
P15R
TC
LG
VLA
SD
RD
SP2
4
RS1
3
RS2
14
13
Geh.
9
15
3
8
5
13
10
14
18
19
6
11
12
1
2
Geh.
19
7
MO1
9
LG
8
MO2
LG
SD
CN1A
CN2
CN3
CN1B
CN3
10k
Ω
10k
Ω
17
7
16
6
15
5
1
14
4
Geh.
LBR
LB
LAR
LA
LZR
LZ
LG
OP
P15R
SD
CN1A
CN1B
RA1
P
D
C
L21
PE
L11
PE
L3
W
L3
L2
V
L2
L1
TE1
TE
2
U
L1
I>
I>
I>
SG
10
M
Encoder
Servomotor
MR-J2S- A
A
A
RA2
RA3
RA2
RA3
RA4
24 V DC
EMG
B2
B1
≤2
m
≤15
m
≤10
m
≤10
m
≤2
m
Zasilanie
3x200V,50Hz
Zewnętrzny opornik
hamujący (opcja) 4
Wyłącznik awaryjny 3/7
Servo ON
Reset
Prędkość zaprogramowana 2
Wybór obrotów w prawo
Wybór obrotów w lewo
Alarm 9
Prędkość zero
Ograniczenie prędości
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe)
Impulsy fazy Z enkodera
(wyjście różnicowe))
Zacisk wspólny
Impulsy fazy Z enkodera (otwarty
kolektor)
Miernik analogowy
max. 1 mA
dwukierunkowy
Kabel komunikacyjny
(opcja)
Kabel enkodera
(opcja)
Zwierany przy wyłączeniu
sygnału Servo ON (SON)i
przy alarmie (ALM) J
Rozłączany
sygnałem ALM i
EMG
Analogowe
zadawanie momentu
±8 V/max.
PC
Prędkość zaprogramowana 1
Sygnał gotowości
Analogowe ograni-
czenie prędkości
0–+10 V/max.
1
2/6
5/8
5/8
5/8
5/8
5/8
5/8
5/8
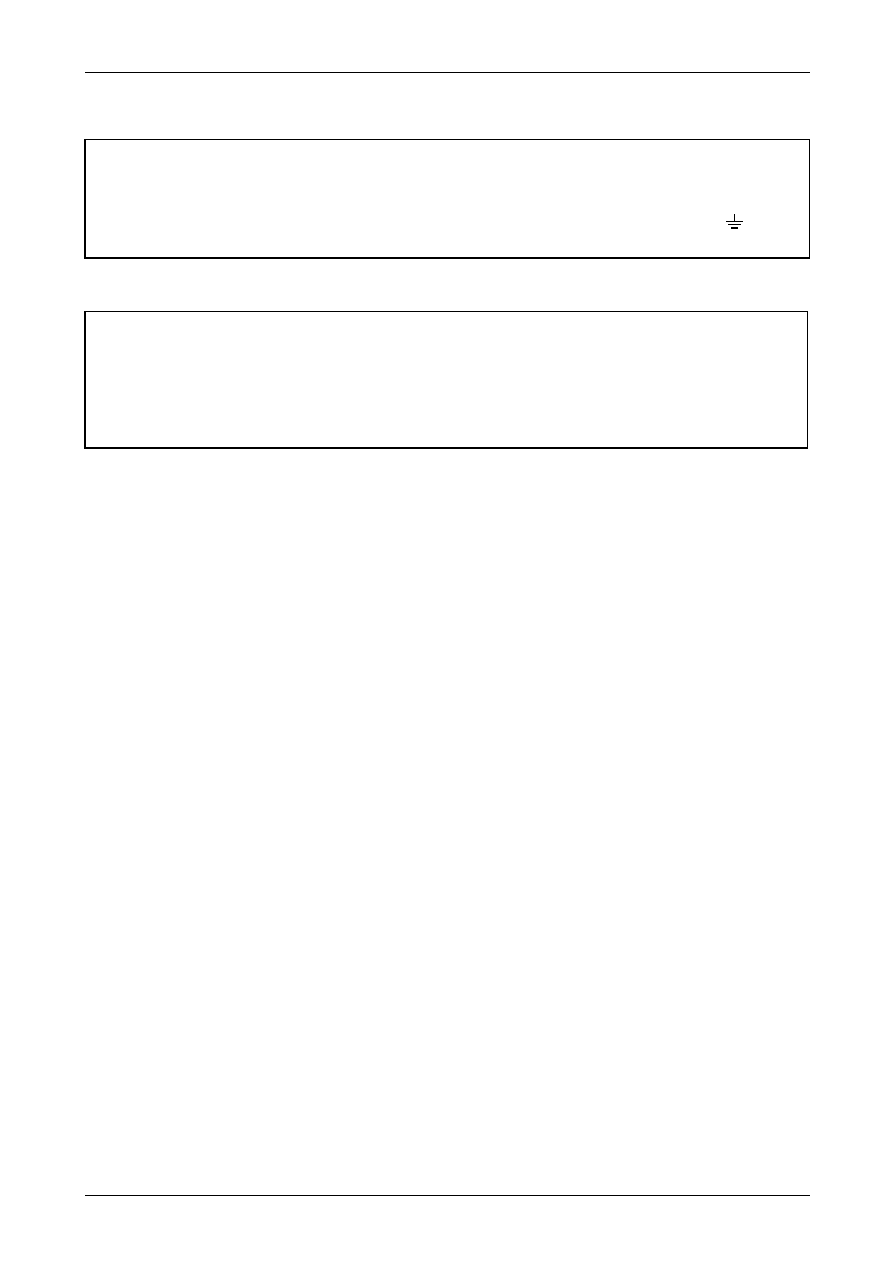
Typowe przykłady schematu połączeń
Podłączanie
MELSERVO J2-Super
3 - 47
Uwagi do Rys. 3-39 i Rys. 3-40
D Przedstawiony sposób podłączania zacisków zewnętrznego opornika hamującego dotyczy
serwowzmacniaczy MR-J2S-350A i poniżej. Opis dotyczący pozostałych modeli przedsta-
wiono w Tab. 3-3.
E Złącza CN1A, CN1B, CN2 i CN3 mają identyczny kształt. Należy zachować uwagę przy
podłączaniu, gdyż błędne podłączenie wtyków może spowodować zwarcie i uszkodzenie
serwowzmacniacza.
F Łączny prąd, pobierany przez zewnętrzne przekaźniki nie może przekraczać 80mA. Jeżeli
wymagana jest wyższa wartość, należy zastosować zewnętrzny zasilacz.
G Abu uzyskać stan gotowości do pracy, konieczne jest załączenie sygnału z wyłącznika
awaryjnego (EMG) oraz sygnałów LSN i LSP.
H Styki o jednakowych oznaczeniach są zwarte ze sobą wewnątrz serwowzmacniacza.
I Dla bezpieczeństwa sygnał wyjściowy alarmu (ALM) jest podczas normalnej pracy (bez
alarmu) w stanie wysokim (zwarty z COM). Sygnał alarmu (stan niski na wyjściu ALM) musi
powodować zatrzymanie serwonapędu przez sekwencję sterowania.
J Dotyczy tylko serwosilników z luzownikiem elektromagnetycznym.
!!!
OSTRZEŻENIE:
●
Serwowzmacniacz i serwosilnik muszą być uziemione w niezawodny sposób.
●
Aby zapobiec porażeniu prądem elektrycznym należy bezwzględnie połączyć zacisk
uziemienia ochronnego (PE) serwowzmacniacza, oznaczony symbolem
, z uzie-
mieniem ochronnym szafy sterowniczej.
!
OSTRZEŻENIE:
●
Diody bocznikujące obciążenie przekaźniki DC muszą być podłączone z zacho-
waniem prawidłowej biegunowości. W przeciwnym wypadku sterowany obwód nie
będzie działać, a serwowzmacniacz może ulec uszkodzeniu.
●
Bezwzględnie konieczne jest zainstalowanie wyłącznika bezpieczeństwa (EMG -
styk normalnie zwarty).

Podłączanie
Typowe przykłady schematu połączeń
3 - 48
NOTATKI:
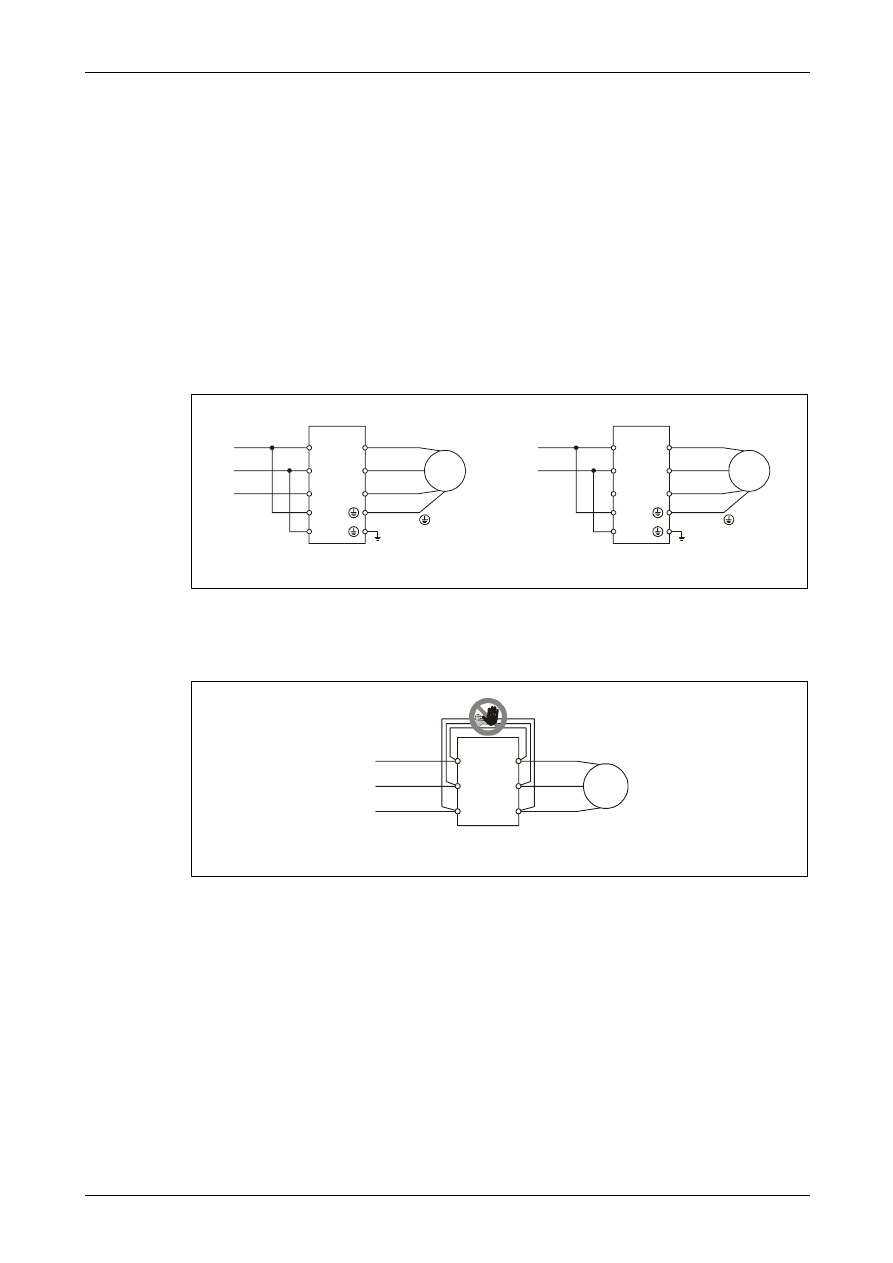
Przed pierwszym uruchomieniem
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 1
4
Użytkowanie serwonapędu
4.1 Przed
pierwszym
uruchomieniem
Okablowanie
Przed pierwszym uruchomieniem należy upewnić się, czy:
●
Odpowiednie napięcie zasilające jest prawidłowo podłączone na właściwe zaciski wejścio-
we (zasilanie trójfazowe 3x230V: L1, L2, L3, L11, L21 lub jednofazowe 1x230V: L1, L2, L11,
L21) serwowzmacniacza.
●
Zaciski wyjściowe obwodu mocy (U, V, W) są połączone z odpowiednimi fazowo zaciskami
zasilania serwosilnika (U, V, W).
●
Zaciski wyjściowe serwowzmacniacza (U, V, W) nie są zwarte z zaciskami zasilania (L1,
L2, L3).
●
Serwowzmacniacz i serwosilnik są poprawnie uziemione.
●
W przypadku, gdy używany jest zewnętrzny opornik hamujący:
– dla modeli MR-J2S-350A i niżej usunięta została zwora pomiędzy zaciskami D-P, a
opornik został podłączony skręconą parą przewodów do zacisków P-C
– dla modeli MR-J2S-500A i wyżej odłączono wewnętrzny opornik od zacisków P-C, i na
to miejsce został podłączony skręconą parą przewodów opornik zewnętrzny
●
Jeżeli używane są wyłączniki krańcowe ruchu, zapewnione jest odpowiednie wysterowanie
sygnałów LSP/LSN.
S000897C
Rys. 4-41: Podłączanie serwowzmacniacza
S000582C
Rys. 4-42: Niedopuszczalne zwarcie zacisków obwodu mocy
MR-J2S- A
M
U
U
V
V
W
W
L1
L2
L3
L11
L21
M
U
U
V
V
W
W
L1
L2
L3
L11
L21
MR-J2S- A
Zasilanie trójfazowe
Zasilanie jednofazowe
M
U
V
W
L1
L2
L3
Serwowzmacniacz
Użytkowanie serwonapędu
Przed pierwszym uruchomieniem
4 - 2
●
Na żaden ze styków złączy CN1A i CN1B nie zostało omyłkowo podane napięcie wyższe,
niż 24 V DC.
●
Styki SD i SG złączy CN1A i CN1B nie zostały omyłkowo zwarte.
●
Kable połączeniowe nie są nadmiernie obciążone mechanicznie (naprężenie, nadmierne
wygięcie itp.).
Środowisko
Przed pierwszym uruchomieniem należy upewnić się, czy:
●
Przewody zasilające i sygnałowe nie zostały uszkodzone lub zwarte przez ścinki prze-
wodów, metalowe opiłki itp.
Maszyna
Przed pierwszym uruchomieniem należy upewnić się, czy:
●
Wszystkie połączenia śrubowe są odpowiednio dosiągnięte
●
Serwosilnik i napędzane przezeń urządzenia mogą być bezpiecznie uruchomione.
S000583C
Rys. 4-43: Niedopuszczalne zwarcie styków SD i SG
SD
SG
Serwowzmacniacz
Uruchomienie
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 3
4.2 Uruchomienie
4.2.1
Wybór trybu sterowania
Poprzez ustawienie odpowiedniej wartości parametru Pr. 0 wybierz właściwy tryb regulacji. Wy-
brana wartość parametru staje się aktywna po wyłączeniu i załączeniu zasilania. Zaleca się
odczekanie ok. 10 s przed ponownym załączeniem zasilania.
W poniższej tabeli zestawiono wartości parametru i odpowiadające im tryby regulacji:
!!!
ZAGROŻENIE:
●
Nie wolno obsługiwać urządzeń mokrymi rękami. Stwarza to zagrożenie porażenia
prądem elektrycznym.
●
Przed uruchomieniem należy sprawdzić wartości parametrów. Przy błędnych
ustawieniach maszyna może wykonywać nieprzewidywalne ruchy.
!
OSTRZEŻENIE:
●
Podczas pracy oraz przez pewien czas po wyłączeniu zasilania nie należy dotykać,
ani zbliżać żadnych przedmiotów (np. kabli) do radiatora serwowzmacniacza, rezys-
tora hamującego, serwosilnika, ponieważ mogą one być gorące i spowodować
oparzenie człowieka lub uszkodzenie przedmiotów.
●
Przed połączeniem serwosilnika z maszyną należy upewnić się, że pracuje on
prawidłowo na biegu jałowym.
Wartość
Tryb regulacji
0
Regulacja położenia (pozycjonowanie)
1
Tryb przełączany między regulacją położenia i prędkości
2
Regulacja prędkości
3
Tryb przełączany między regulacją prędkości i momentu
4
Regulacja momentu
5
Tryb przełączany między regulacją momentu i położenia
Tab. 4-6: Wartości parametru i odpowiadające im tryby regulacji
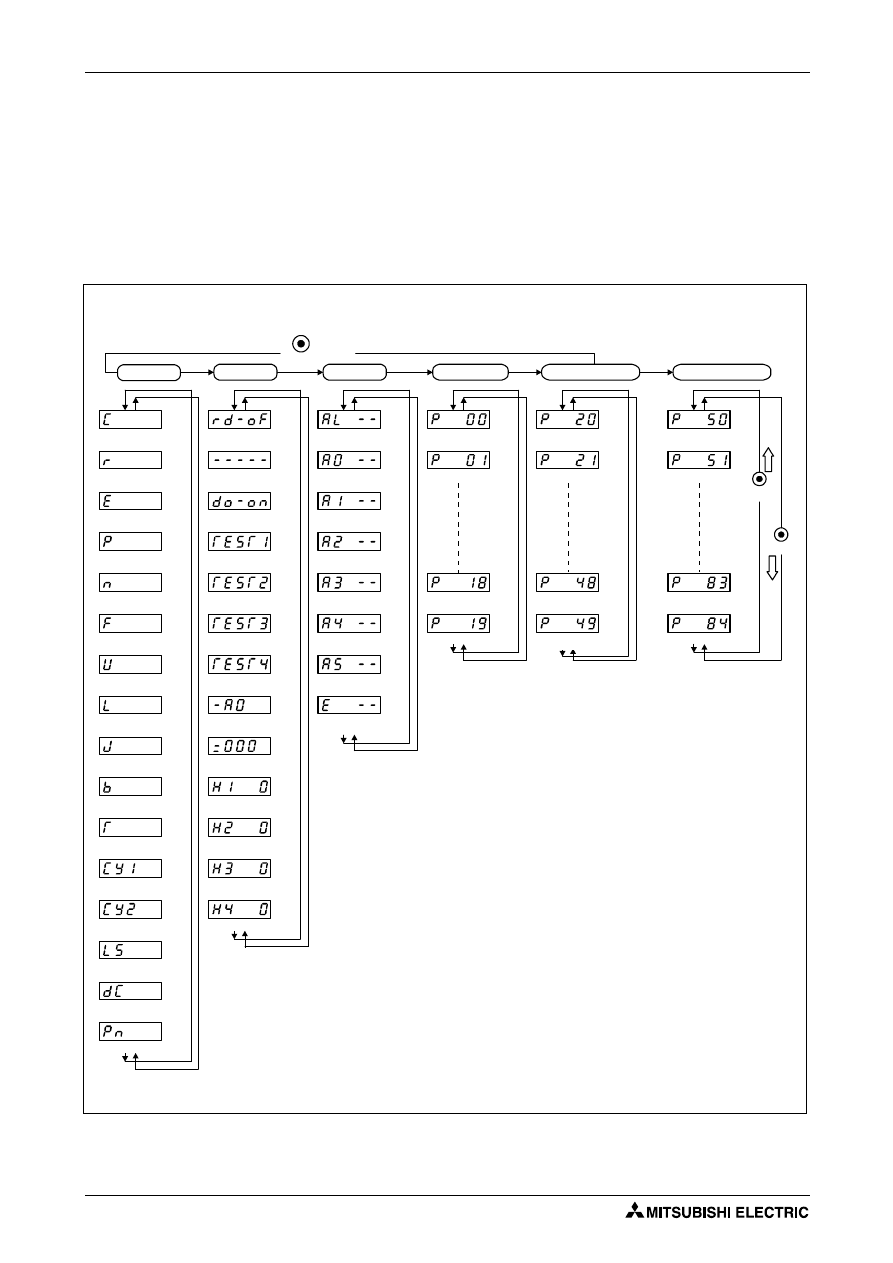
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 4
4.3
Elementy operacyjne serwowzmacniacza
4.3.1 Sposób
użytkowania wyświetlacza i klawiatury
5-znakowy, 7-segmentowy wyświetlacz LED, umieszczony na ścianie czołowej służy do moni-
torowania stanu, diagnostyki, ustawiania parametrów itd. Klawisze MODE, UP i DOWN służą do
przełączania wyświetlanych danych zgodnie z poniższym rysunkiem. Aby uzyskać dostęp do
parametrów rozszerzonych należy je uaktywnić przy pomocy parametru Pr. 19.
S000810C
Rys. 4-44: Algorytm przełączania wyświetlacza
Tastenbetätigung
Ta
st
enbet
ät
igung
Ta
st
enbet
ät
igung
Mode
Aktueller Alarm
Letzter Alarm
Zweitletzter Alarm
Drittletzter Alarm
Viertletzter Alarm
Sechstletzter Alarm
Fünftletzer Alarm
Fehlernummer des
Parameters
Spg. d. analogen Drehmoment-
sollwerts/-grenze [mV]
Betriebsbereitschaft
Anzeige des externen
E/A-Signals
Erzwungenes
Ausgangssignal
Testbetrieb
Jog-Vorschub
Testbetrieb
Positionierung
Testbetrieb
Betrieb ohne Servomotor
Testbetrieb
Maschinenanalyse
Software-Version
höherwertige Stellen
Software-Version
niederwertige Stellen
Automatischer
VC-Offset
Motorserie
Motortyp
Encodertyp
Rückmeldeimpulse
[Impulse]
Servomotor-Drehzahl
[U/min.]
Schleppfehler
[Impulse]
Sollwertimpulse
[Impulse]
Befehlsimpulsfrequenz
[Impulse/s x 1000]
Spg. d. analogen Drehzahl-
sollwerts/-grenze [mV]
Auslastung
Bremskreis [%]
Effektivwert
Drehmoment [%]
Spitzenwert
Drehmoment [%]
Momentanes
Drehmoment [%]
Position innerhalb einer
Umdrehung, niedr. [Imp.]
Position innerhalb einer
Umdrehung, hoch [100 Imp.]
Absolut-Zähler
[Umdrehungen]
Verhältnis der Trägheits-
momente [Anzahl]
Busspannung [V]
Statusanzeige
Diagnose
Alarm
Grundparameter
Zusatzparameter 1
Zusatzparameter 2
Auswahl Regelfunktion/
Auswahl opt. Bremswiderstand
Funktionswahl 1
Auswahl Statusanzeige
Schreibschutz
Funktionswahl 2
Funktionswahl 3
Parametrierung
Eingangssignale 7
Parametrierung
Ausgangssignale
Parameter 50
Funktionswahl 6
Parameter 83
Parameter 84
UP
Down
Impulsy enkodera
(imp.)
Prędkość serwo-
silnika (obr/min.)
Wartość uchybu (imp.)
Impulsy zadawania
(imp.)
Częstotliwość ciągu
impulsów (kHz)
Analog. zadawanie/ogra-
niczenie prędkości (mV)
Analog. zadawanie/ogra-
niczenie momentu (mV)
Obciążenie hamowania
regeneracyjnego (%)
Wartość skuteczna mo-
mentu (%)
Wartość szczytowa mo-
mentu (%)
Wartość chwilowa mo-
mentu (%)
Położenie w ramach obro-
tu, niższe pozycje (imp.)
Położenie w ramach obro-
tu, wyższe pozycje (x100)
Licznik pozycji absolutnej
(obroty)
Współczynnik momentu
bezwładności
Napięcie DC (V)
Przełączanie przez kolejne naciskanie klawisza
Stan
Diagnostyka
Pr. podstawowe
Pr. rozszerzone 1
Pr. rozszerzone 2
Gotowość do pracy
Stany logiczne wejść/
wyjść dwustanowych
Wymuszanie stanów
logicznych na wyjściach
Operacje próbne - praca
krokowa (JOG)
Operacje próbne -
pozycjonowanie
Operacje próbne -
praca bez silnika
Operacje próbne -
analizator maszyny
Wersja oprogramowa-
nia
Numer oprogramowa-
nia
Automatyczne prze-
sunięcie zera VC
Seria serwosilnika
Model serwosilnika
Typ enkodera
Bieżący alarm
Historia:Ostatni alarm
Historia: drugi alarm
Historia: trzeci alarm
Historia: czwarty alarm
Historia: piąty alarm
Historia: szósty alarm
Błąd parametru
Wybór trybu regulacji/
wybór opcji hamowania
Wybór funkcji 1
Wybór komunikatu
Blokada zapisu Pr.
Wybór funkcji 2
Wybór funkcji 3
Wybór sygnału
wejściowego 7
Wybór sygnału
wyjściowego
Parametr 50
Wybór funkcji 6
Parametr 83
Parametr 84
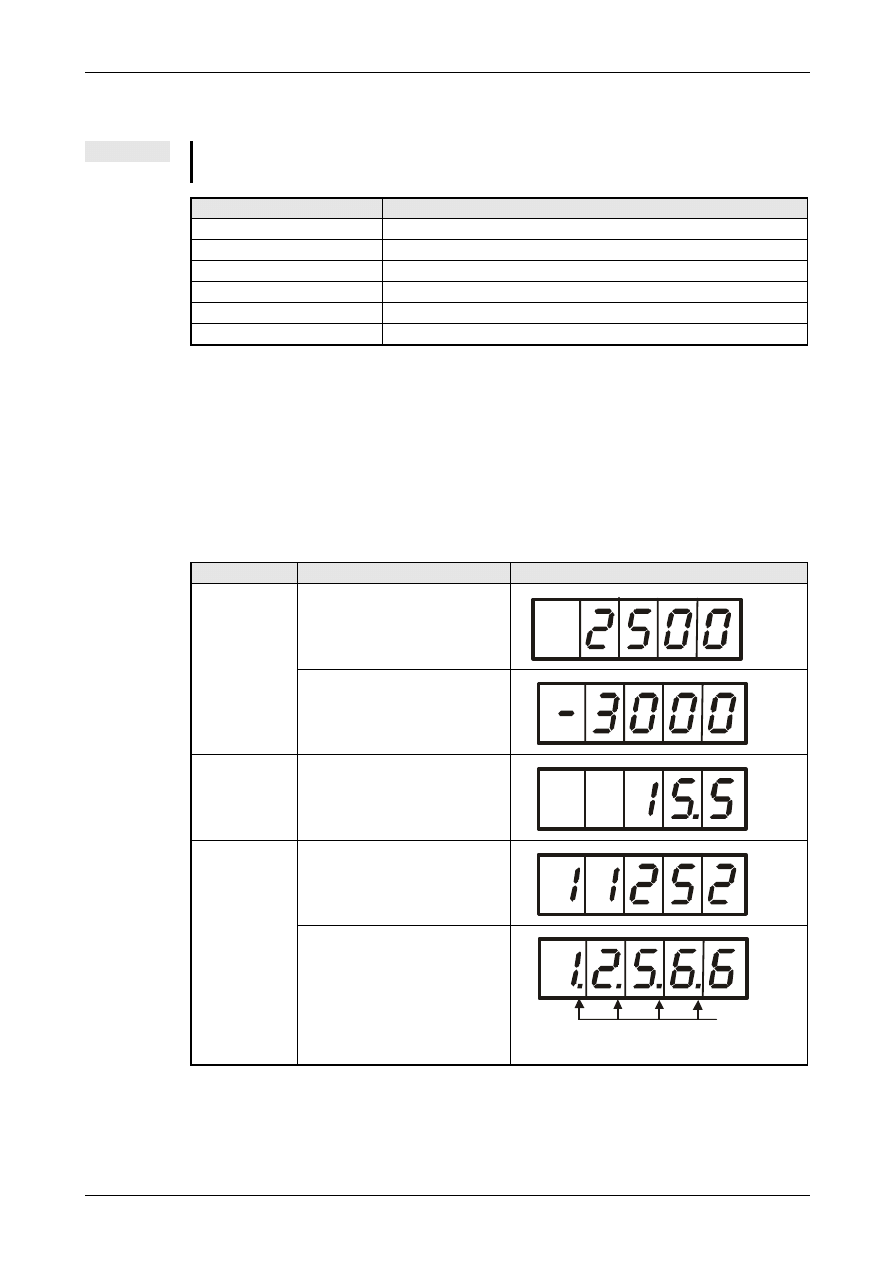
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 5
4.3.2
Sygnalizacja stanu pracy
Podczas pracy na wyświetlaczu normalnie sygnalizowany jest stan pracy. Poprzez naciskanie
klawiszy UP i DOWN można wybrać inne dane, po każdym naciśnięciu na wyświetlaczu po-
jawiają się kolejne symbole zgodnie z tabelą Tab. 4.3. Dane zostaną wyświetlone po zatwier-
dzeniu wyboru klawiszem SET.
Sposób wyświetlania ilustrują poniższe przykłady.
UWAGA
Dane, które będą wyświetlane automatycznie po załączeniu zasilania można wybrać przy
pomocy parametru Pr. 18.
Tryb regulacji
Wyjściowy stan wyświetlacza
Położenia
Skumulowana ilość impulsów enkodera (C)
Położenia/prędkości
Skumulowana ilość impulsów enkodera (C)/Prędkość silnika (r)
Prędkości
Prędkość silnika (r)
Prędkości/momentu
Prędkość silnika (r)/Napięcie zadawania momentu (U)
Momentu
Napięcie zadawania momentu (U)
Momentu/położenia
Napięcie zadawania momentu (U)/Skumulowana ilość impulsów enkodera (C)
Tab. 4-7: Wyświetlane dane
Tryb regulacji
Stan
Wyświetlanie
Prędkość ser-
wosilnika
Obroty w prawo z prędkością
2500obr/min
Obroty w lewo z prędkością 3000obr/
min
Kierunek obrotów w lewo jest sygnali-
zowany znakiem minus
Moment
bezwładności
obciążenia
Współczynnik 15,5
Impulsy zadające
11252 impulsów
-12566 impulsów
Wartość ujemna jest sygnalizowana
świeceniem wszystkich przecinków
dziesiętnych
Świecące
przecinki
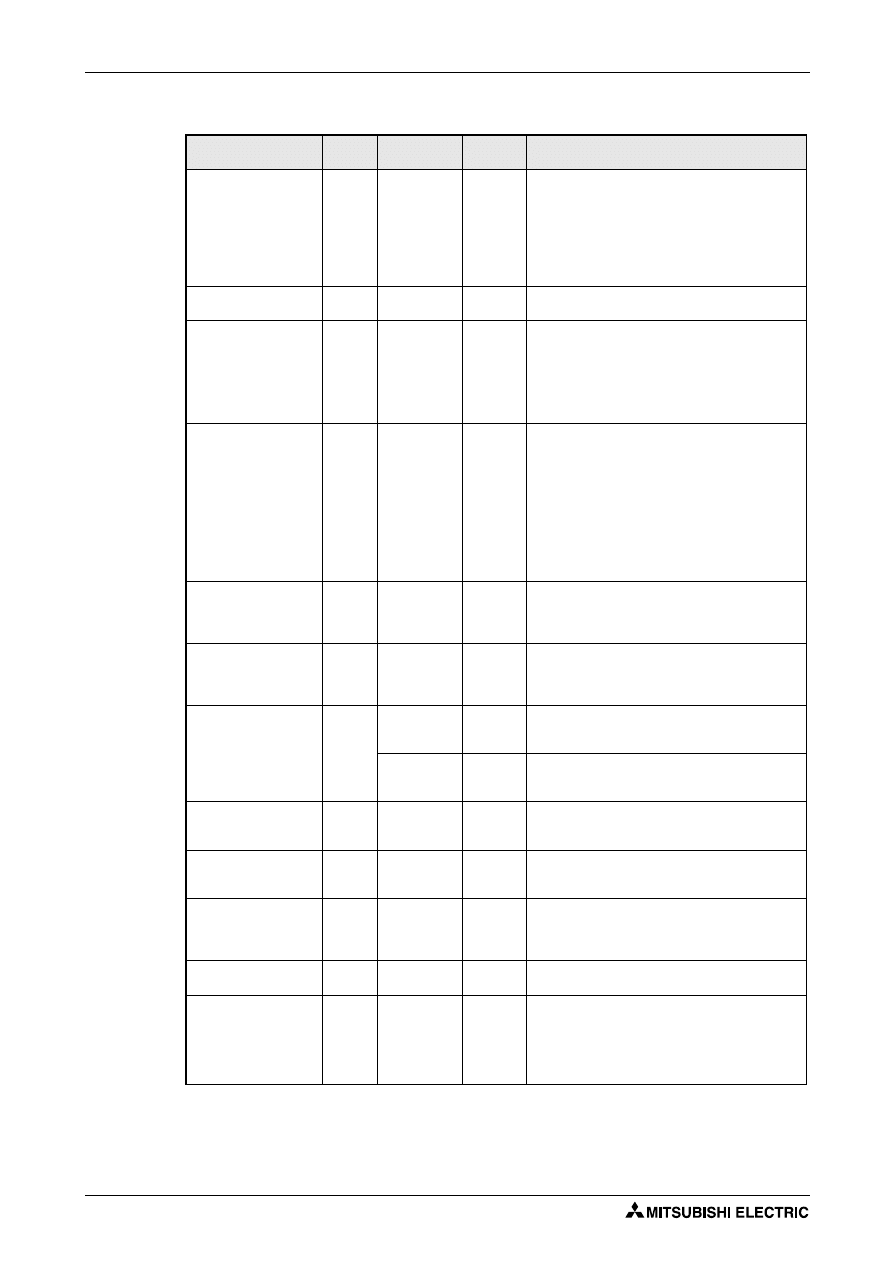
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 6
Nazwa
Symbol
Zakres war-
tości
Jednost-
ka
Opis
Impulsy sprzężenia
zwrotnego
C
−99999 do
+99999
impuls
Impulsy sprzężenia zwrotnego z enkodera są
sumowane i wyświetlana jest sumaryczna ilość. Po
przekroczeniu wartości 99999 zliczanie trwa nadal,
lecz ponieważ wyświetlacz jest pięcioznakowy,
wyświetlane jest pięć ostatnich cyfr. Wyświetlaną
wartość można wyzerować przez naciśnięcie klawi-
sza SET. Obroty w lewo sygnalizowane są świece-
niem kropek dziesiętnych po 4 pierwszych cyfrach.
Prędkość serwo-
wosilnika
r
−5400 do
+5400
obr/min
Wyświetlana jest prędkość serwosilnika, w
zaokrągleniu do 0,1 obr/min.
Wielkość uchybu
E
−99999 do
+99999
impuls
Wyświetlany jest błąd między pozycją zadaną i
rzeczywistą.Po przekroczeniu wartości 99999 zlic-
zanie jest kontynuowane od 0. Obroty w lewo syg-
nalizowane są świeceniem kropek dziesiętnych po
4 pierwszych cyfrach. Wyświetlana jest ilość
impulsów bez przemnożenia przez wartość
przekładni elektronicznej (CMX/CDV).
Impulsy zadające
P
−99999 do
+99999
impuls
Impulsy zadające są sumowane i wyświetlana jest
sumaryczna ilość. Ponieważ wyświetlana jest ilość
impulsów bez przemnożenia przez wartość
przekładni elektronicznej (CMX/CDV), może ona
być różna od ilości impulsów z enkodera. Po przek-
roczeniu wartości 99999 zliczanie trwa nadal, lecz
ponieważ wyświetlacz jest pięcioznakowy, wyś-
wietlane jest pięć ostatnich cyfr. Wyświetlaną war-
tość można wyzerować przez naciśnięcie klawisza
SET. Obroty w lewo sygnalizowane są świeceniem
kropek dziesiętnych po 4 pierwszych cyfrach.
Częstotliwość impulsów
zadających
n
−800 do +800 kHz
Wyświetlana jest częstotliwość zadającego ciągu
impulsów. Częstotliwość nie jest przemnożona
przez wartość przekładni elektronicznej (CMX/
CDV).
Napięcie analogowego
zadawania prędkości,
napięcie analogowego
ograniczenia prędkości
F
−10,00 do
+10,00
V
Wyświetlane jest napięcie analogowego sygnału
zadawania prędkości (w trybie regulacji prędkości)
lub napięcie analogowego sygnału ograniczenia
prędkości (w trybie regulacji momentu).
Napięcie analogowego
zadawania momentu,
napięcie analogowego
ograniczenia momentu
U
0 do +10,00
V
W trybie regulacji położenia lub prędkości wyświet-
lane jest napięcie analogowego sygnału ogranicze-
nia momentu TLA
−10,00 do
+10,00
V
W trybie regulacji momentu wyświetlane jest
napięcie analogowego sygnału zadawania
momentu TLA
Współczynnik
obciążenia opornika
hamującego
L
0 do 100
%
Wyświetlany jest stosunek w % aktualnie wytra-
canej mocy regeneracji do wartości maksymalnie
dopuszczalnej.
Wartość skuteczna
momentu obrotowego
J
0 do 300
%
Wyświetlana jest wartość skuteczna momentu
obrotowego (w % wartości znamionowej), uśred-
niona w ciągu ostatnich 15 sekund.
Wartość szczytowa
momentu obrotowego
b
0 do 400
%
Wyświetlana jest najwyższa w ciągu ostatnich 15
sekund wartość momentu generowanego w trybie
napędzania oraz hamowania (w % wartości znami-
onowej).
Wartość chwilowa
momentu obrotowego
T
0 do 400
%
Wyświetlana jest aktualna wartość chwilowa (w %
wartości znamionowej) momentu obrotowego.
Położenie w ramach
jednego obrotu, niższe
pozycje
Cy1
0 do 99999
impuls
Wyświetlane jest położenie w ramach jednego
obrotu silnika, wyrażone w impulsach enkodera. Po
przekroczeniu wartości 99999 zliczanie jest
wznawiane od 0. Wyświetlana wartość rośnie przy
obrotach w prawo (tj. dla ruchu przeciw wska-
zówkom zegara, patrząc od strony wału).
Tab. 4-8: Przegląd wyświetlanych danych (1)
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 7
Nazwa
Symbol
Zakres war-
tości
Jednost-
ka
Opis
Położenie w ramach
jednego obrotu, wyższe
pozycje
Cy2
0 do +1310
100
impulsów
Wyświetlane jest położenie w ramach jednego
obrotu silnika, wyrażone w setkach impulsów
enkodera. Po przekroczeniu wartości maksymalnej
zliczanie jest wznawiane od 0. Wyświetlana war-
tość rośnie przy obrotach w prawo.
Licznik pozycji absolut-
nej ABS
LS
-32768 do
+32767
obrót
W systemie pozycjonowania absolutnego wyświet-
lana jest droga od pozycji bazowej, wyrażona w
jednostkach licznika pozycji absolutnej.
Współczynnik momentu
bezwładności
obciążenia
dC
0,0 do +300,0 0,1 (krot-
ność)
Wyświetlana jest oszacowana wartość stosunku
momentu bezwładności obciążenia do momentu
bezwładności serwosilnika.
Napięcie w stopniu
pośrednim DC
Pn
0 do +450
V
Wyświetlana jest wartość napięcia w stopniu
pośrednim DC obwodu mocy serwowzmacniacza
Tab. 4-9: Przegląd wyświetlanych danych (2)
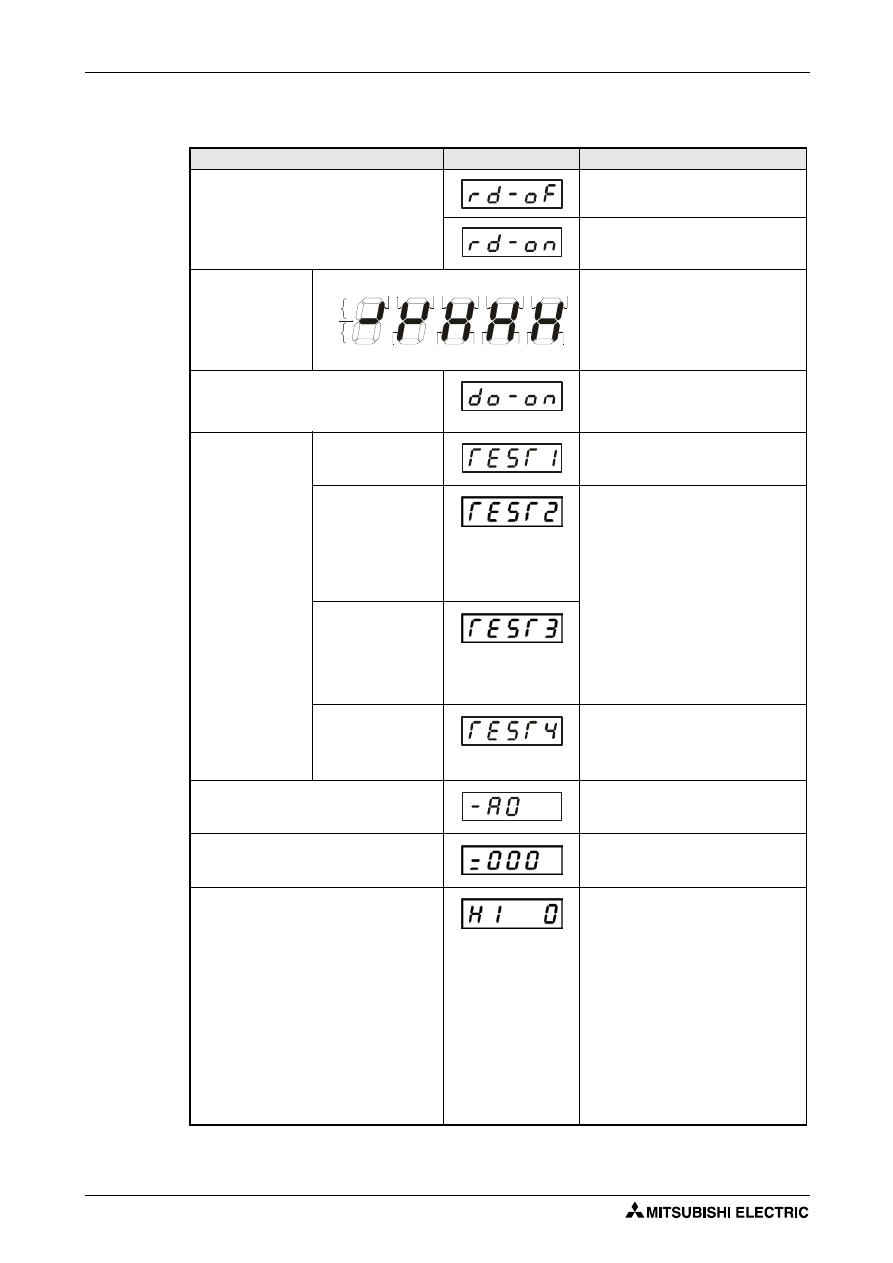
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 8
4.3.3 Wyświetlanie danych diagnostycznych
Oznaczenie
Wyświetlane znaki
Opis
Gotowość do pracy
Brak gotowości. Wyświetlane w trakcie
inicjalizacji serwowzmacniacza oraz w
przypadku wystąpienia alarmu.
Gotowość.
Serwowzmacniacz został pomyślnie
zainicjalizowany i jest gotowy do pracy.
Stan sygnałów
wejść/wyjść
dwustanowych
Wyświetlane są aktualne stany logiczne
wejść/wyjść dwustanowych. Górne seg-
menty odpowiadają wejściom, dolne -
wyjściom (patrz rysunek obok). Segment
podświetlony - wejście/wyjście jest w
stanie ON, wygaszony - OFF.
Wymuszony stan sygnału wyjściowego
Możliwe jest wymuszenie stanu logicz-
nego wyjścia dwustanowego, niezależnie
od jego aktualnego stanu. Dalsze infor-
macje - patrz Str. 4-10.
Operacje próbne
Praca krokowa (JOG)
Umożliwia uruchomienie serwosilnika
bez zewnętrznych sygnałów zadających.
Dalsze informacje - patrz Str. 4-11.
Pozycjonowanie
Operacja pozycjonowania na polecenie z
programu narzędziowego (MRZJW3-
SETUP151E) na komputerze PC przez
złącze RS-232C. Nie jest możliwe
wydanie polecenia z pomocą klawiszy
operacyjnych serwowzmacniacza. Nie są
wymagane żadne sygnały na wejściach
serwowzmacniacza.
Praca bez serwosilnika
Serwowzmacniacz pracuje bez podłą-
czonego serwosilnika, symulując jego
obecność, generując sygnały wyjściowe
oraz wyświetlając odpowiednie komuni-
katy. Możliwe jest np. testowanie modułu
pozycjonującego. Dalsze informacje -
patrz Str. 4-13.
Analizator maszyny
Przy użyciu programu narzędziowego
(MRZJW3-SETUP151E) na podłączo-
nym przez złącze RS-232C komputerze
PC możliwe jest wyliczenie punktów
rezonansowych maszyny.
Ostatnie znaki numeru wersji oprogramowa-
nia
Wyświetlany jest symbol wersji opro-
gramowania
Pierwsze znaki numeru wersji oprogramowa-
nia
Wyświetlany jest numer systemowy
oprogramowania.
Automatyczny offset sygnału VC
W przypadku, gdy serwosilnik obraca się
przy zerowej wartości analogowego
zadawania (VC) lub ograniczenia (VLA)
prędkości, funkcja ta automatycznie
koryguje punkt zerowy wejścia analogo-
wego. Aby uruchomić daną funkcję,
należy wykonać poniższą procedurę.
Powoduje to wpisanie w Pr. 29 wartości
automatycznej korekty przesunięcia
punktu zerowego.
1. Wciśnij klawisz SET
2. Klawiszami UP/DOWN wybierz "1".
3. Wciśnij klawisz SET
Użycie funkcji jest niemożliwe, jeśli
napięcie na wejściu VC lub VLA jest
poza zakresem
−0,4V ... +0,4V.
Tab. 4-10: Przegląd funkcji diagnostycznych (1)
CN1A
14
CN1B
18
CN1B
15
CN1B
9
CN1B
8
CN1B
7
CN1A
8
CN1B
14
CN1B
5
CN1B
17
CN1B
16
CN1B
4
CN1B
6
CN1B
19
CN1A
18
CN1A
19
Eingangs-
signale
Ausgangs-
signale
Ständig
leuchtend
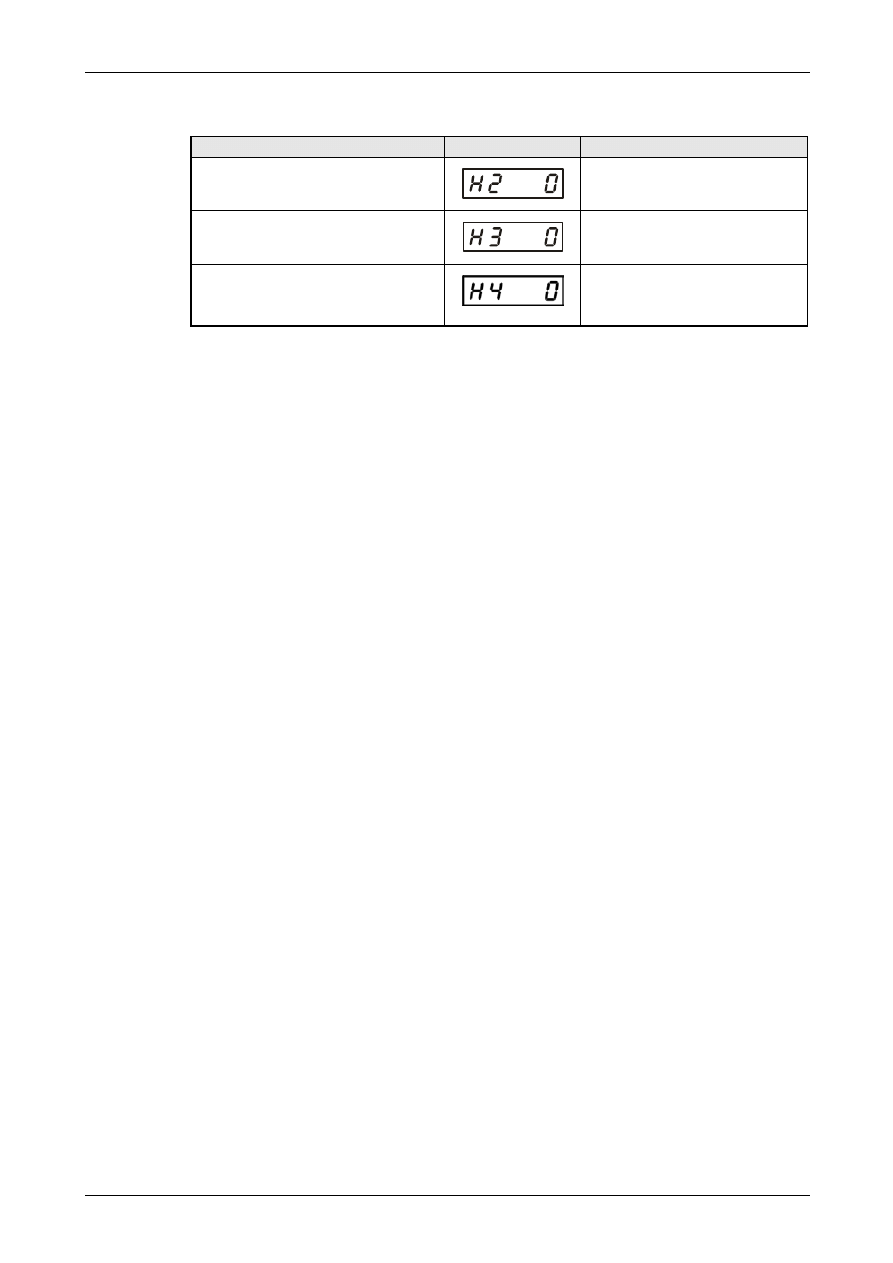
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 9
Oznaczenie
Wyświetlane znaki
Opis
Seria serwosilnika
Wyświetlany jest symbol serii aktualnie
podłączonego silnika. Szczegółowy opis
zawiera podręcznik serwosilników.
Typ serwosilnika
Wyświetlany jest symbol typu aktualnie
podłączonego silnika. Szczegółowy opis
zawiera podręcznik serwosilników.
Enkoder
Wyświetlany jest symbol enkodera aktu-
alnie podłączonego silnika. Szczegóło-
wy opis zawiera podręcznik serwosilni-
ków.
Tab. 4-11: Przegląd funkcji diagnostycznych (2)
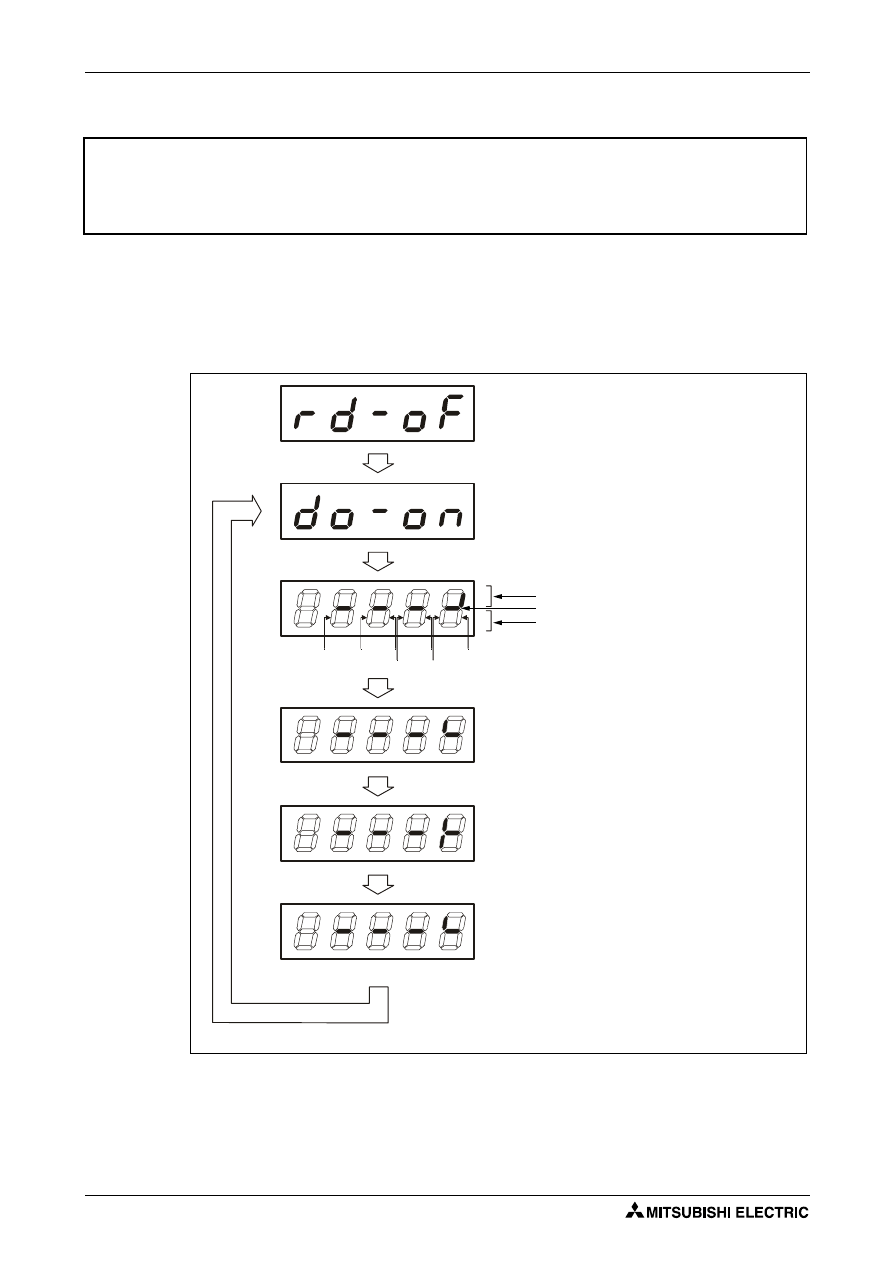
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 10
Wymuszanie stanów logicznych na wyjściach dwustanowych (DO)
Funkcja ta umożliwia ustawienie wyjścia dwustanowego w wybrany stan logiczny (ON lub OFF),
niezależnie od aktualnego stanu serwonapędu, w celu kontroli połączeń itp. Funkcja działa przy
wyłączonym sygnale servo-on (tj. serwowzmacniacz w stanie servo-off).
Po załączeniu serwowzmacniacza należy klawiszem MODE przejść do trybu diagnostycznego
i w trybie servo-off uzyskać na wyświetlaczu poniższy komunikat:
!
OSTRZEŻENIE:
●
Zwolnienie luzownika elektromagnetycznego przez wysterowanie wyjścia CN1B-
19 grozi niebezpieczeństwem! Przed użyciem niniejszej funkcji należy zapewnić
bezpieczeństwo maszyny i obsługi, zwłaszcza w przypadku osi pionowych.
S000830C
Rys. 4-45: Sposób użycia funkcji
CN1A
14
CN1B
18
CN1B
4
CN1B
6
CN1B
19
CN1A
18
CN1A
19
Dwukrotnie wcisnąć klawisz UP.
Wcisnąć i przytrzymać dłużej, niż 2 sekundy
klawisz SET
Wcisnąć 1 raz klawisz MODE
Sygnał wyjściowy na styku CN1A-18 zostaje
wyłączony (CN1A-18-SG rozwarte).
Wcisnąć klawisz UP.
Sygnał wyjściowy na styku CN1A-18 zostaje
załączony (CN1A-18-SG zwarte).
Wcisnąć klawisz DOWN.
Wcisnąć i przytrzymać dłużej, niż 2 sekundy
klawisz SET.
Będzie przełączany sygnał wyjściowy,
odpowiadający świecącemu segmentowi
Dolne segmenty sygnalizują stany wyjść
dwustanowych (świecące: ON, wygaszone:
OFF).
Świeci się górny segment nad segmentem
dolnym, odpowiadającym stykowi CN1A-18
Środkowe segmenty świecą się stale
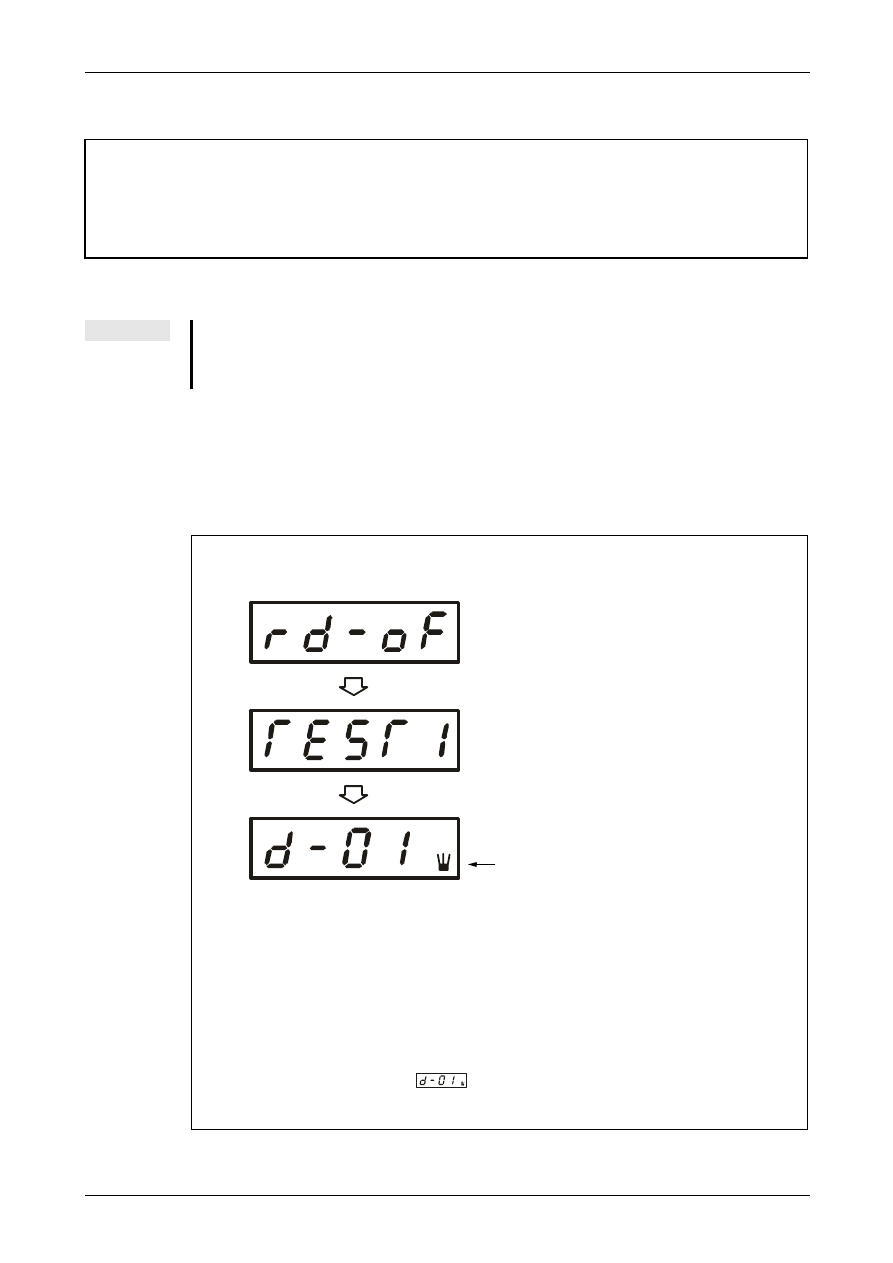
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 11
Operacje próbne
●
Praca krokowa (JOG)
Praca krokowa w trybie operacji próbnych jest możliwa wyłącznie przy braku zewnętrznych sy-
gnałów zadających.
Sposób użycia opisano poniżej (Rys. 4-46):
!
OSTRZEŻENIE:
●
Tryb "Operacje próbne" przeznaczony jest do testowania serwonapędu, a nie
maszyny. Należy używać go wyłącznie z serwosilnikiem nie połączonym z maszyną.
●
W przypadku wystąpienia jakiegokolwiek błędu, należy zatrzymać serwonapęd
przy pomocy zewnętrznego wyłącznika awaryjnego (EMG).
UWAGA
●
Operacje testowe są niemożliwe w absolutnym systemie pozycjonowania. W celu
ich używania należy wybrać "system inkrementalny" w parametrze Pr. 1.
●
Operacje testowe możliwe są tylko przy wyłączonym sygnale Servo ON.
S000831C
Rys. 4-46: Praca w trybie JOG
Wcisnąć klawisz MODE.
Wcisnąć trzykrotnie klawisz UP.
Wcisnąć i przytrzymać ponad 2 sekundy
klawisz SET.
Start:
Wciśnięcie i przytrzymanie klawisza DOWN powoduje obroty serwosilnika w kierunku zgodnym ze
wskazówkami zegara (w lewo, CW), a klawisza UP - w kierunku przeciwnym do wskazówek zegara
(w prawo, CCW). Prędkość serwosilnika jest ustawiona na 200 obr/min, czasy rozpędzania i
hamowania - na 1s. Zmiana tych wartości jest możliwa przy użyciu programu narzędziowego.
Zwolnienie klawisza UP/DOWN powoduje zatrzymanie silnika.
Monitorowanie stanu serwonapędu:
Wciśnięcie klawisza MODE powoduje wyświetlenie komunikatu stanu serwonapędu. Każde kolejne
naciśnięcie klawisza MODE przełącza wyświetlaną wartość.
Wyjście z trybu JOG:
Aby zakończyć pracę w trybie JOG należy wyłączyć zasilanie, lub przy użyciu klawisza MODE uzyskać
na wyświetlaczu komunikat
a następnie wcisnąć i przytrzymać ponad 2 sekundy klawisz
SET.
Gdy na wyświetlaczu pojawi się komunikat jak
obok, serwowzmacniacz jest gotowy do pracy
w trybie JOG.
Miga w trybie operacji próbnych
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 12
●
Pozycjonowanie
Pozycjonowanie w trybie operacji próbnych jest możliwe tylko przy braku zewnętrznych sy-
gnałów pozycjonowania. Konieczne jest zwarcie zacisków EMG-SG, a także zapewnienie zasi-
lania wewnętrznego przez zwarcie zacisków VDD-COM.
Kliknięcie w programie klawisza „Forward“ lub „Reverse“ powoduje uruchomienie silnika i wyko-
nanie ruchu do zadanej w programie pozycji. Wszystkie parametry ruchu mogą być zadawane
w programie. ustawienia wyjściowe oraz ich dostępne zakresy podano w poniższej tabeli:
W poniższej tabeli opisano przeznaczenie klawiszy w programie narzędziowym:
UWAGA
Pozycjonowanie jest możliwe tylko przy użyciu komputera PC z programem narzędziowym.
Parametr
Wartość wyjściowa
Zakres zmian
Droga (impulsy enkodera)
131072 impulsów
0 do 9999999 impulsów
Prędkość
200 obr/min
0 do 5175 obr/min
Czas rozpędzania i hamowania
1000 ms
0 do 20000 ms
Klawisz
Przeznaczenie
Forward
Kliknięcie uruchamia pozycjonowanie, przesunięcie w prawo (CCW)
Reverse
Kliknięcie uruchamia pozycjonowanie, przesunięcie w lewo (CW)
Pause
Kliknięcie podczas ruchu silniku wstrzymuje ruch. Ponowne kliknięcie klawi-
sza "Pause" kasuje operację dalszego pozycjonowania. Aby kontynuować
ruch, należy kliknąć klawisz, którym był on rozpoczęty (Forward lub Reverse).
UWAGI
Jeżeli podczas pozycjonowania zostanie odłączony kabel RS232C, serwosilnik zostanie
natychmiast zatrzymany.
Podczas pozycjonowania możliwe jest monitorowanie stanu serwonapędu.
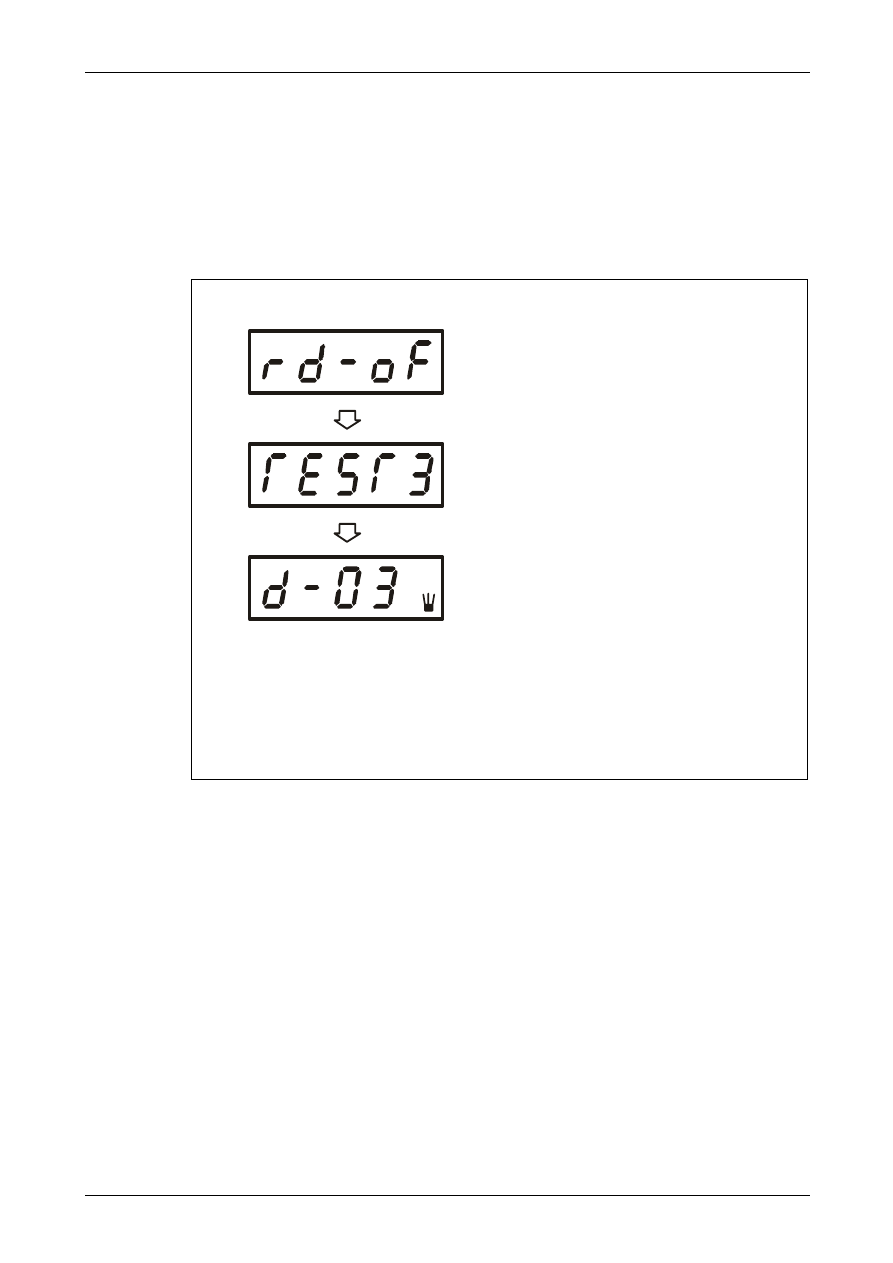
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 13
●
Praca bez serwosilnika
Bez podłączania serwosilnika możliwa jest symulacja jego pracy i uzyskiwanie sygnałów wyjś-
ciowych serwowzmacniacza w odpowiedzi na podawane sygnały wejściowe. Funkcja ta jest
przeznaczona np. do prostego i bezpiecznego testowania programu PLC itp.
Praca bez serwosilnika możliwa jest tylko przy wyłączonym sygnale Servo-ON.
Sposób użycia opisano poniżej:
S000832C
Rys. 4-47: Praca próbna bez serwosilnika
Wcisnąć klawisz MODE.
Wcisnąć klawisz UP pięciokrotnie.
Wcisnąć i przytrzymać ponad 2 sekundy
klawisz SET.
Start:
Podawać sygnały jak przy normalnej pracy.
Monitorowanie stanu serwonapędu:
Wciśnięcie klawisza MODE powoduje wyświetlenie komunikatu stanu serwonapędu. Każde
kolejne naciśnięcie klawisza MODE przełącza wyświetlaną wartość.
Zakończenie pracy bez serwosilnika:
Aby zakończyć pracę bez serwosilnika należy wyłączyć zasilanie.
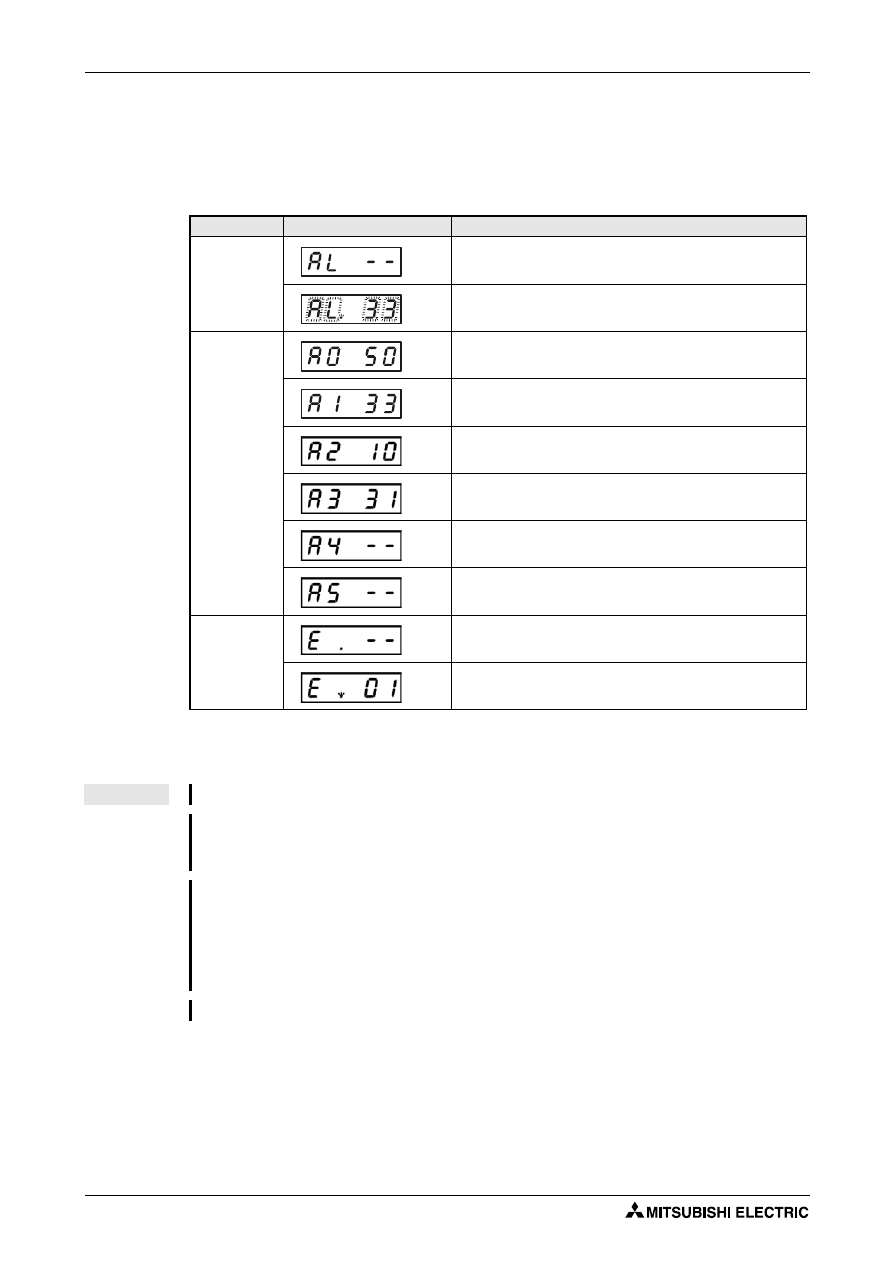
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 14
4.3.4 Komunikaty
alarmowe
Dostępne są: komunikat o bieżącym alarmie, historia poprzednich alarmów oraz komunikat o
błędnej wartości parametru. Ostatnie dwa znaki wskazują numer alarmu lub numer błędnego
parametru. W poniższej tabeli pokazano przykładowe komunikaty.
Oznaczenie
Wyświetlany komunikat
Opis
Bieżący alarm
Oznacza brak stanu alarmu
Oznacza wystąpienie alarmu numer 33 (Przepięcie).
Podczas trwania stanu alarmu komunikat miga.
Historia
alarmów
Oznacza, że alarmem, który wystąpił jako ostatni, był alarm
numer 50 (Przeciążenie 1)
Oznacza, że alarmem, który wystąpił jako przedostatni, był alarm
numer 33 (Przepięcie)
Oznacza, że alarmem, który wystąpił jako trzeci od końca, był
alarm numer 10 (Zbyt niskie napięcie)
Oznacza, że alarmem, który wystąpił jako czwarty od końca, był
alarm numer 31 (Nadmierna prędkość)
Oznacza, że nie jest zarejestrowany żaden piąty w kolejności
alarm
Oznacza, że nie jest zarejestrowany żaden szósty w kolejności
alarm
Błędna war-
tość parametru
Oznacza, że nie ma błędnych wartości parametrów
Oznacza, że błędna jest wartość parametru Pr. 1
Tab. 4-12: Przykłady komunikatów alarmowych
UWAGI
Komunikat o wystąpieniu alarmu jest wyświetlany niezależnie od trybu pracy wyświetlacza
Podczas trwania alarmu możliwe jest normalne przełączanie wyświetlacza w celu wyświet-
lenia innych danych. W takim przypadku kropka dziesiętna przy czwartym znaku miga, co
sygnalizuje stan alarmu.
Skasowanie alarmu jest możliwe w jeden z poniższych sposobów:
a) Wyłączenie i załączenie zasilania
b) Wciśnięcie klawisza SET przy wyświetlonym komunikacie alarmu
c) Podanie sygnału resetu (RES)
Przed skasowaniem alarmu i przywróceniem pracy serwonapędu konieczne jest usunięcie
przyczyny alarmu.
Historia alarmów może być skasowana przy użyciu parametru Pr. 16.
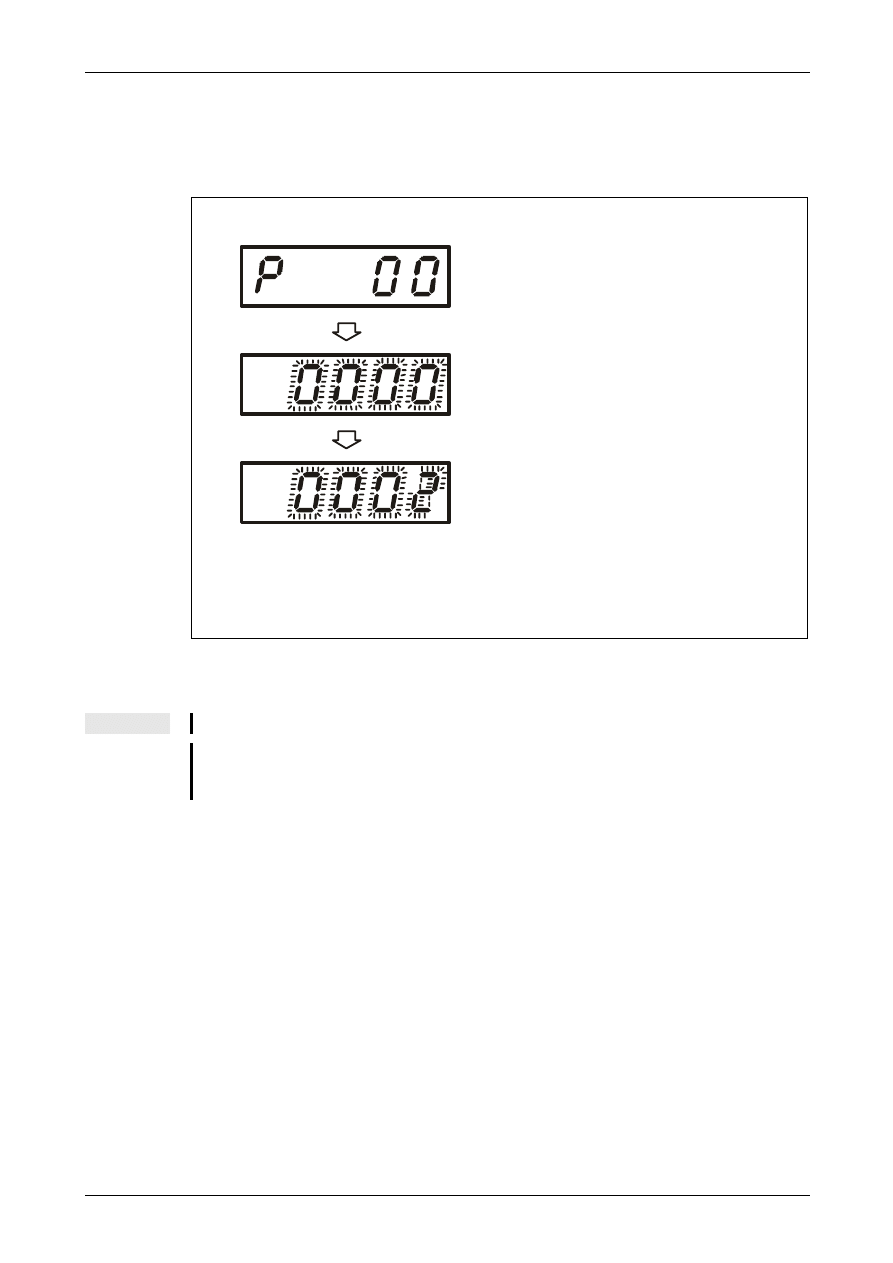
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 15
4.3.5 Parametry
Poniższy przykład wyjaśnia, w jaki sposób po załączeniu zasilania przejść do zmiany trybu re-
gulacji na regulację prędkości (parametr Pr. 0):
S000843C
Rys. 4-48: Przyklad parametryzacji - wybór trybu regulacji prędkości
UWAGI
Przy użyciu klawiszy UP i DOWN można wybrać do edycji inne numery parametrów.
Po zmianie wartości dowolnego z parametrów: Pr. 0, 1, 15, 16, 18 do 22, 27, 41 do 55 i 65
konieczne jest wyłączenie i ponowne załączenie zasilania serwowzmacniacza, by zapisane
wartości stały się aktywne.
Wcisnąć klawisz MODE i uzyskać komunikat
jak obok.
Wyświetlany jest numer parametru.
Klawiszami UP i DOWN można zmieniać
numer parametru, przeznaczonego do edycji.
Nacisnąć klawisz SET dwukrotnie.
Wartość wybranego parametru pojawia się i
miga.
Wcisnąć klawisz UP.
Gdy wartość miga, może być zmieniana
klawiszami UP (zwiększanie) lub DOWN
(zmniejszanie).
Wciśnięcie klawisza SET zapisuje wybraną
wartość parametru
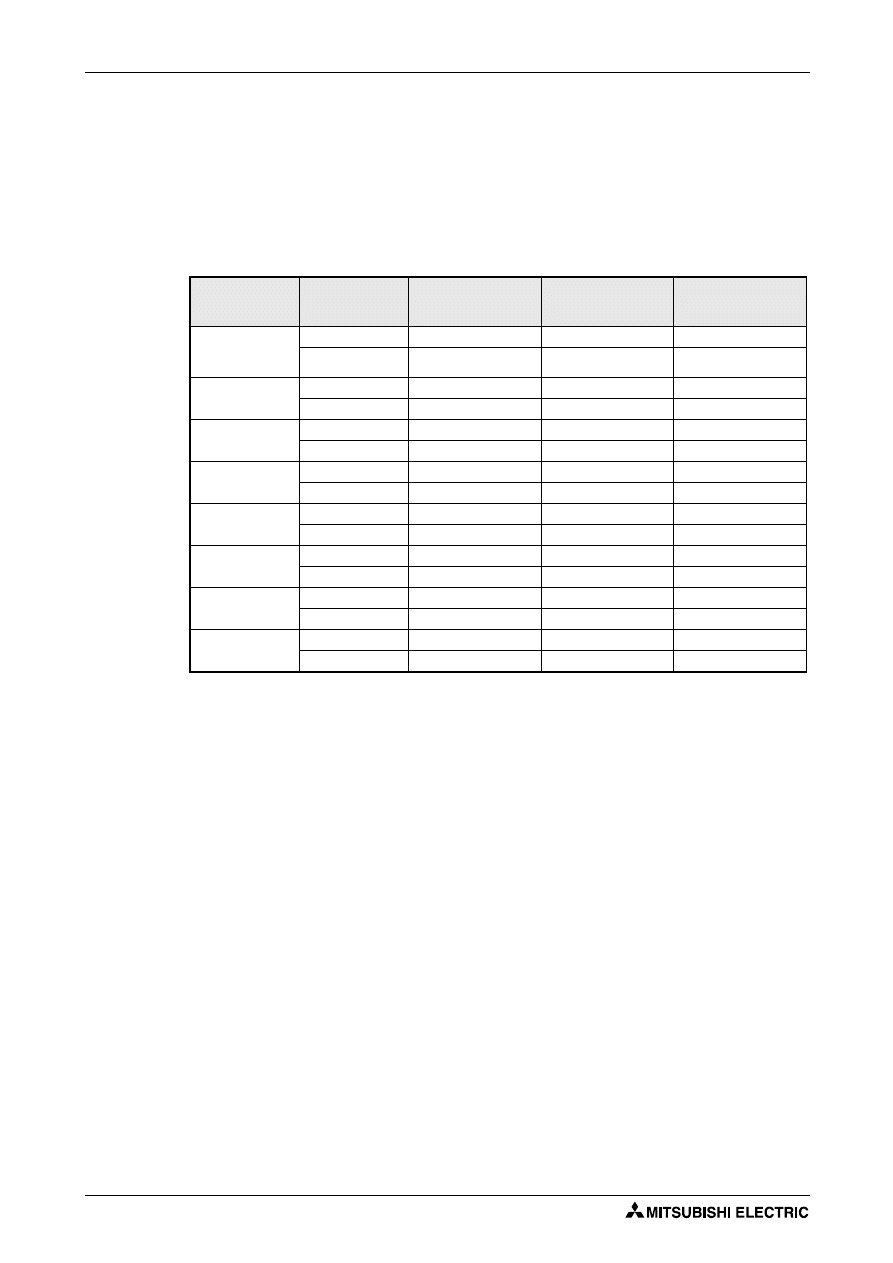
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 16
Parametry rozszerzone
Parametry serwowzmacniacza MR-J2S dzielą się na podstawowe (Pr. 0 do 19), rozszerzone 1
(Pr. 20 do 49) i rozszerzone 2 (Pr. 50 do 84). Aby uzyskać dostęp do parametrów rozszerzonych
konieczne jest ustawienie odpowiedniej wartości parametru Pr. 19 (Blokada dostępu do
parametrów). Po zmianie wartości parametru Pr. 19 konieczne jest wyłączenie i ponowne
załączenie zasilania, by zmiana stała się aktywna.
Poniższa tabela przedstawia w skrócie wpływ wartości Pr. 19 na dostęp do poszczególnych
grup parametrów:
Wartość
Funkcja
Parametry podsta-
wowe
Pr. 0 do 19
Parametry rozsze-
rzone 1
Pr. 20 do 49
Parametry rozsze-
rzone 2
Pr. 50 do 84
0000
(Wartość wyjś-
ciowa)
Odczyt
✓
—
—
Zapis
✓
—
—
000A
Odczyt
Tylko Pr. 19
—
—
Zapis
Tylko Pr. 19
—
—
000B
Odczyt
✓
✓
—
Zapis
✓
—
—
000C
Odczyt
✓
✓
—
Zapis
✓
✓
—
000E
Odczyt
✓
✓
✓
Zapis
✓
✓
✓
100B
Odczyt
✓
—
—
Zapis
Tylko Pr. 19
—
—
100C
Odczyt
✓
✓
—
Zapis
Tylko Pr. 19
—
—
100E
Odczyt
✓
✓
✓
Zapis
Tylko Pr. 19
—
—
Tab. 4-13: Dostęp do parametrów rozszerzonych
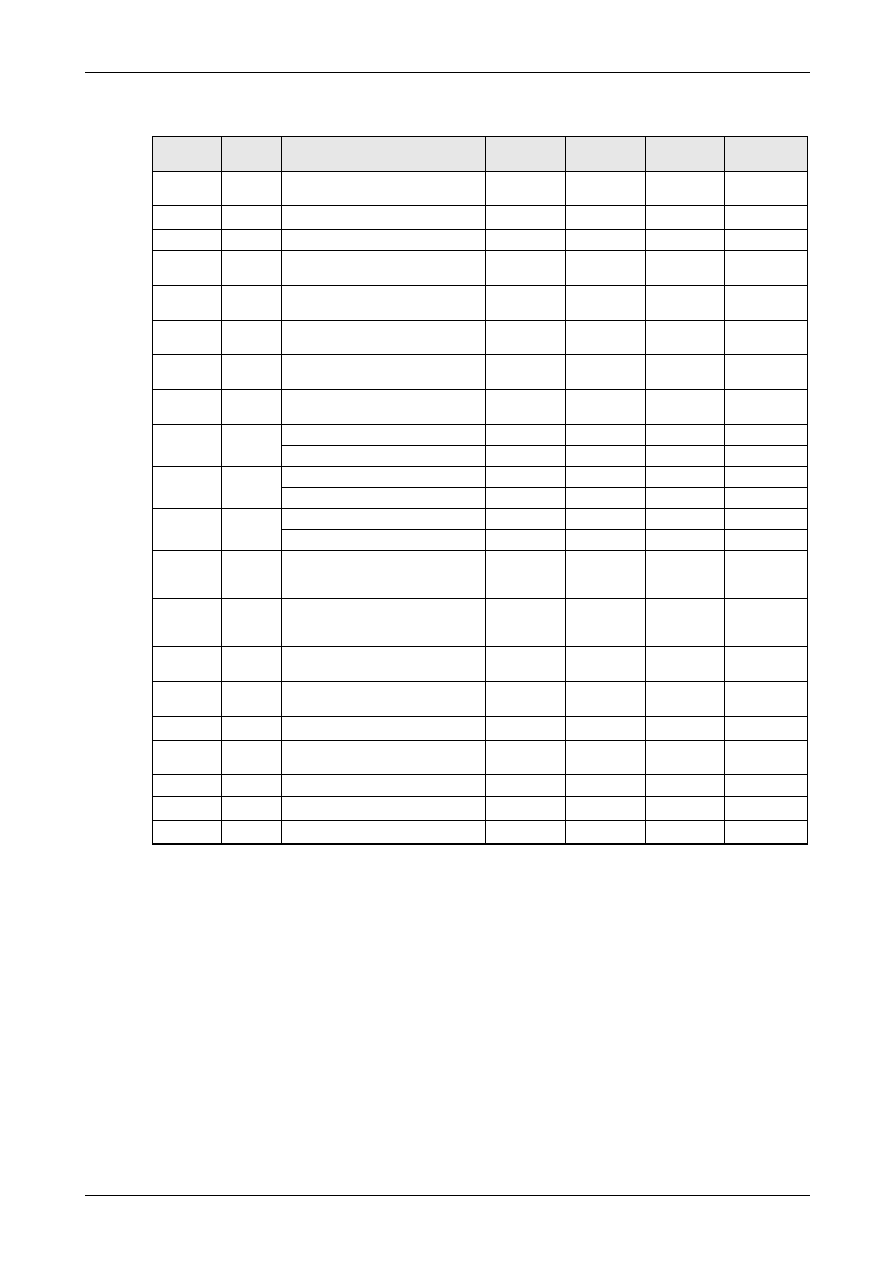
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 17
W poniższej tabeli opisano krótko parametry podstawowe (Pr. 0 do 19):
a
Aby nowe ustawienie danego parametru stało się aktywne, po jego zmianie konieczne jest
wyłączenie i ponowne załączenie zasilania.
b
Symbole w kolumnie "Tryb regulacji" oznaczają tryby, w których dany parametr ma zas-
tosowanie:
P: Regulacja położenia
S: Regulacja prędkości
T: Regulacja momentu obrotowego
Numer
parametru
Symbol
Nazwa
Tryb regu-
lacji
b
Ustawienie
fabryczne
Jednostka
Ustawienie
użytkownika
0
STY
a
Wybór trybu regulacji/ Wybór opcjo-
nalnego opornika hamującego
P S T
0000
1
OP1
a
Wybór funkcji 1
P S T
0002
2
ATU
Auto-Tuning
P S
0105
3
CMX
Przekładnia elektroniczna
(Licznik)
P
1
4
CDV
Przekładnia elektroniczna
(Mianownik)
P
1
5
INP
Zakres strefy „Pozycjonowanie
wykonane“
P
100
impuls
6
PG1
Współczynnik wzmocnienia
regulatora położenia 1
P
35
rad/s
7
PST
Czas rozpędzania/ hamowanie
(pozycjonowanie)
P
3
ms
8
SC1
Prędkość zaprogramowana 1
S
100
obr/min
Ograniczenie prędkości 1
T
100
obr/min
9
SC2
Prędkość zaprogramowana 2
S
500
obr/min
Ograniczenie prędkości 2
T
500
obr/min
10
SC3
Prędkość zaprogramowana 3
S
1000
obr/min
Ograniczenie prędkości 3
T
1000
obr/min
11
STA
Czas rozpędzania
(Regulacja prędkości/ Regulacja
momentu)
S T
0
ms
12
STB
Czas hamowania
(Regulacja prędkości/ Regulacja
momentu)
S T
0
ms
13
STC
Stała czasowa dla sinoidalnej krzy-
wej rozpędzania/ hamowania
S T
0
ms
14
TQC
Stała czasowa filtra zadawania
momentu
T
0
ms
15
SNO
a
Numer stacji
P S T
0
16
BPS
a
Prędkość komunikacji,
Kasowanie listy alarmów
P S T
0000
17
MOD
Wybór funkcji wyjścia analogowego
P S T
0100
18
DMD
a
Wybór komunikatu stanu
P S T
0000
19
BLK
a
Blokada zapisu
P S T
0000
Tab. 4-14: Przegląd parametrów podstawowych
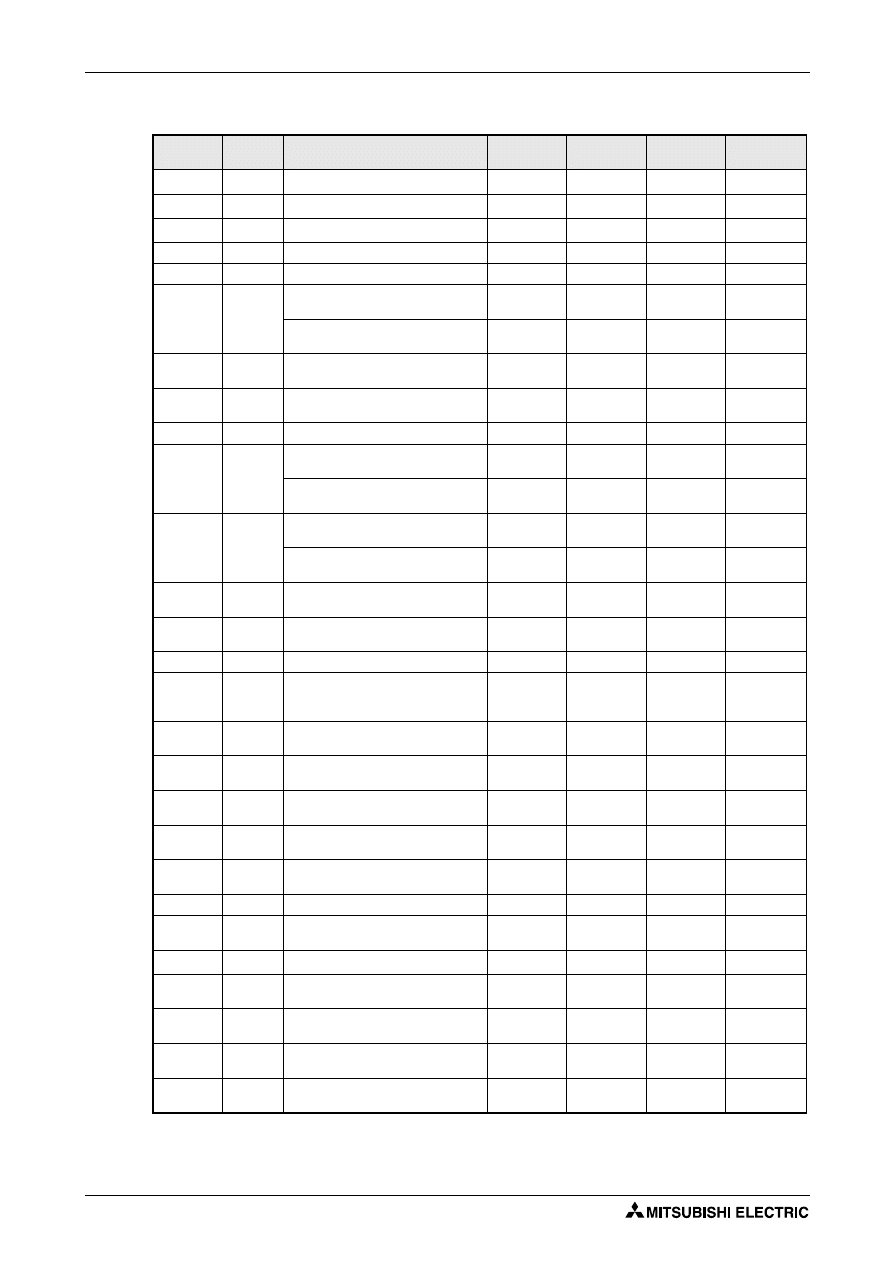
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 18
W poniższej tabeli przedstawiono przegląd parametrów rozszerzonych: Pr. 20 do 49:
Numer
parametru
Symbol
Nazwa
Tryb regu-
lacji
b
Ustawienie
fabryczne
Jednostka
Ustawienie
użytkownika
20
OP2
a
Wybór funkcji 2
P S T
0000
21
OP3
a
Wybór funkcji 3
P
0000
22
OP4
a
Wybór funkcji 4
P S T
0000
23
FFC
Wzmocnienie funkcji „Feed forward“ P
0
%
24
ZSP
Szerokość zakresu „Prędkość zero“
P S T
50
obr/min
25
VCM
Prędkość przy maksimum analo-
gowego sygnału zadawania
S
c
obr/min
Prędkość przy maksimum analo-
gowego sygnału ograniczenia
T
c
obr/min
26
TLC
Moment przy maksimum analo-
gowego sygnału zadawania
T
100
%
27
ENR
a
Rozdzielczość emulowanych na
wyjściu impulsów enkodera
P S T
4000
impulsów/
obrót
28
TL1
Ograniczenie momentu 1
P S T
100
%
29
VCO
Przesunięcie zera analogowego
sygnału zadawania prędkości
S
d
mV
Przesunięcie zera analogowego
sygnału ograniczenia prędkości
T
d
mV
30
TLO
Przesunięcie zera analogowego
sygnału zadawania momentu
T
0
mV
Przesunięcie zera analogowego
sygnału ograniczenia momentu
S
0
mV
31
MO1
Przesunięcie zera wyjścia analo-
gowego 1
P S T
0
mV
32
MO2
Przesunięcie zera wyjścia analo-
gowego 2
P S T
0
mV
33
MBR
Synchronizacja czasowa luzownika
P S T
100
ms
34
GD2
Stosunek momentu bezwładności
obciążenia do momentu
bezwładności serwosilnika
P S T
70
x 0,1
35
PG2
Współczynnik wzmocnienia
regulatora położenia 2
P
35
rad/s
36
VG1
Współczynnik wzmocnienia
regulatora prędkości 1
P S
177
rad/s
37
VG2
Współczynnik wzmocnienia
regulatora prędkości 2
P S
817
rad/s
38
VIC
Stała czasowa członu I regulatora
prędkości
P S
48
ms
39
VDC
Współczynnik wzmocnienia członu D
regulatora prędkości
P S
980
40
—
Zarezerwowany —
0
—
41
DIA
a
Automatyczny sygnał wejściowy
(SON/LSP/LSN)
P S T
0000
42
DI1
a
Wybór sygnału wejściowego1
P S T
0003
43
DI2
a
Wybór sygnału wejściowego 2
(CN1B-styk 5)
P S T
0111
44
DI3
a
Wybór sygnału wejściowego 3
(CN1B-styk 14)
P S T
0222
45
DI4
a
Wybór sygnału wejściowego 4
(CN1A-styk 8)
P S T
0665
46
DI5
a
Wybór sygnału wejściowego 5
(CN1B-styk 7)
P S T
0770
Tab. 4-15: Przegląd parametrów rozszerzonych (1)
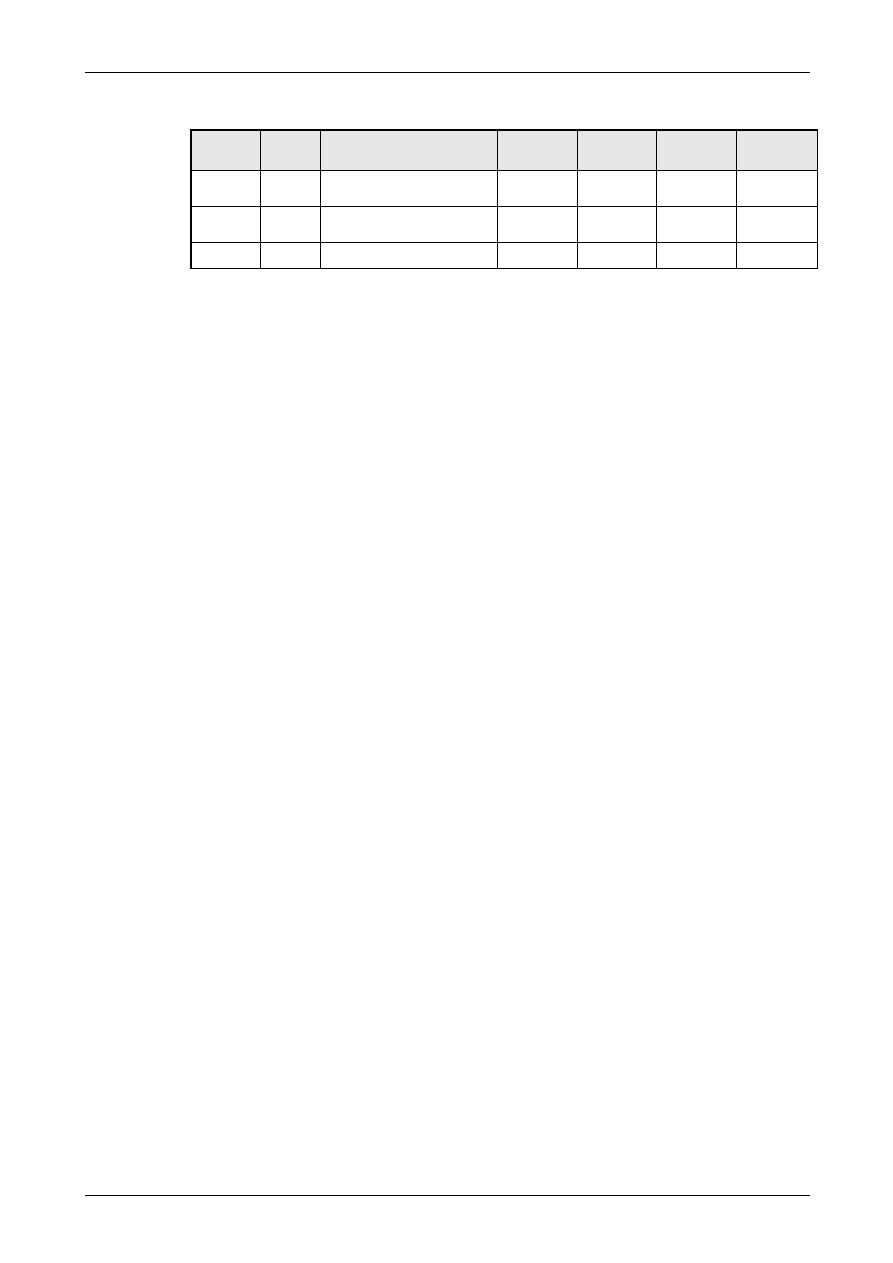
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 19
a
Aby nowe ustawienie danego parametru stało się aktywne, po jego zmianie konieczne jest
wyłączenie i ponowne załączenie zasilania.
b
Symbole w kolumnie "Tryb regulacji" oznaczają tryby, w których dany parametr ma zas-
tosowanie:
P: Regulacja położenia
S: Regulacja prędkości
T: Regulacja momentu obrotowego
c
Prędkość znamionowa używanego serwosilnika
d
Zależne od modelu serwowzmacniacza
Numer
parametru
Symbol
Nazwa
Tryb regu-
lacji
b
Ustawienie
fabryczne
Jednostka
Ustawienie
użytkownika
47
DI6
a
Wybór sygnału wejściowego 6
(CN1B-styk 8)
P S T
0883
48
DI7
a
Wybór sygnału wejściowego 7
(CN1B-styk 9)
P S T
0994
49
DO1
a
Wybór sygnału wyjściowego
P S T
0000
Tab. 4-16: Przegląd parametrów rozszerzonych (2)
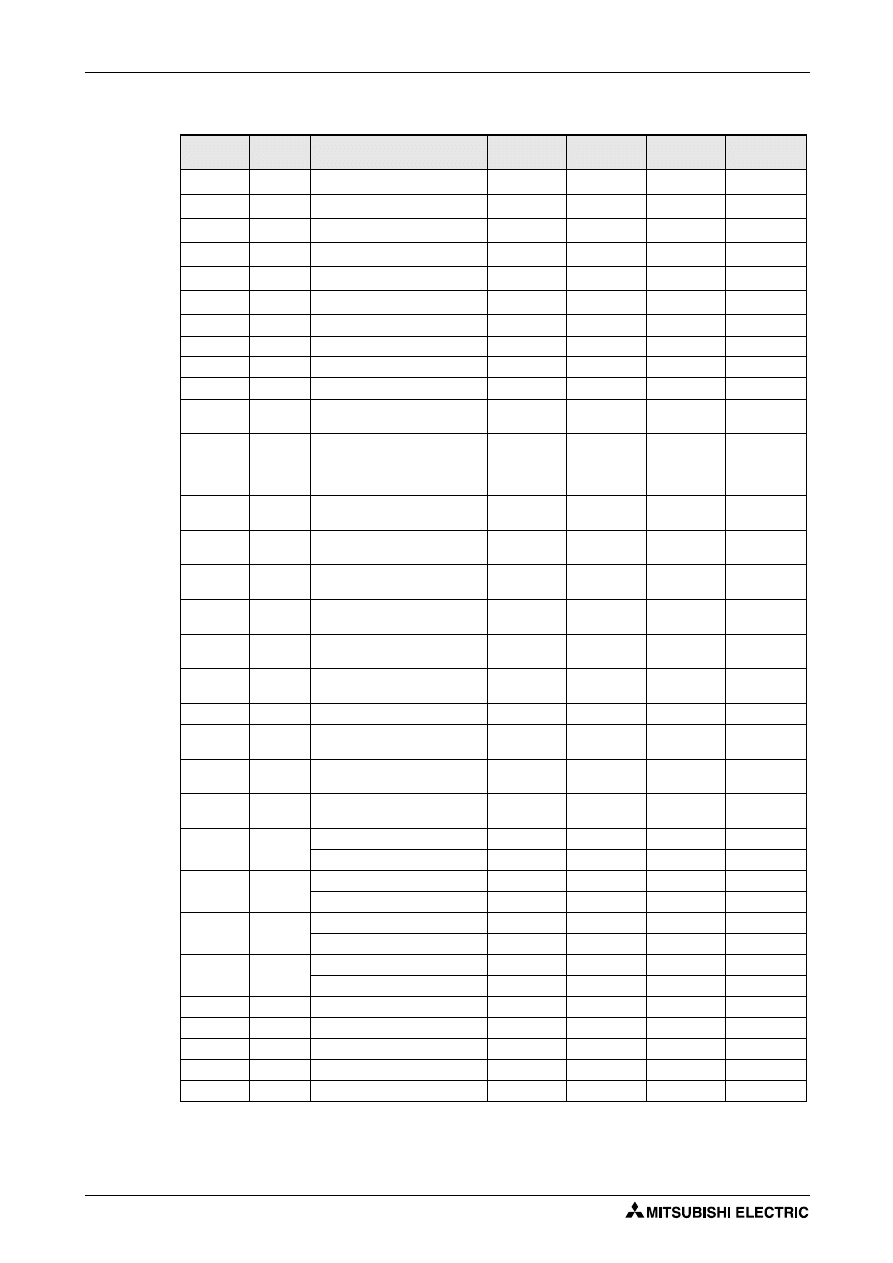
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 20
W poniższej tabeli przedstawiono przegląd parametrów rozszerzonych: Pr. 50 do 84:
Numer
parametru
Symbol
Nazwa
Tryb regu-
lacji
b
Ustawienie
fabryczne
Jednostka
Ustawienie
użytkownika
50
—
Zarezerwowany
—
0000
—
51
OP6
a
Wybór funkcji 6
P S T
0000
52
—
Zarezerwowany
—
0000
—
53
OP8
a
Wybór funkcji 8
P S T
0000
54
OP9
a
Wybór funkcji 9
P S T
0000
55
OPA
a
Wybór funkcji A
P
0000
56
SIC
Time-out komunikacji
P S T
0
s
57
—
Zarezerwowany
—
10
—
58
NH1
Pierwszy filtr antywibracyjny
P S T
0000
59
NH2
Drugi filtr antywibracyjny
P S T
0000
60
LPF
Filtr dolnoprzepustowy, adapta-
cyjne tłumienie wibracji
P S T
0000
61
GD2B
Druga wartość ilorazu
momentu bezwładności
obciążenia do momentu
bezwładności serwosilnika
P S
70
x 0,1
62
PG2B
Zmiana wzmocnienia regula-
tora położenia 2
P
100
%
63
VG2B
Zmiana wzmocnienia regula-
tora prędkości 2
P S
100
%
64
VICB
Zmiana stałej czasowej członu I
regulatora prędkości
P S
100
%
65
CDP
a
Wybór kryterium przełączania
parametrów regulatorów
P S
0000
66
CDS
Wartość progowa przełączenia
parametrów regulatorów
P S
10
c
67
CDT
Stała czasowa zmiany war-
tości parametrów regulatorów
P S
1
ms
68
—
Zarezerwowany
—
0
—
69
CMX2
2. wartość licznika przekładni
elektronicznej
P
1
70
CMX3
3. wartość licznika przekładni
elektronicznej
P
1
71
CMX4
4. wartość licznika przekładni
elektronicznej
P
1
72
SC4
Prędkość zaprogramowana 4
S
200
obr/min
Ograniczenie prędkości 4
T
200
obr/min
73
SC5
Prędkość zaprogramowana 5
S
300
obr/min
Ograniczenie prędkości 5
T
300
obr/min
74
SC6
Prędkość zaprogramowana 6
S
500
obr/min
Ograniczenie prędkości 6
T
500
obr/min
75
SC7
Prędkość zaprogramowana 7
S
800
obr/min
Ograniczenie prędkości 7
T
800
obr/min
76
TL2
Ograniczenie momentu 2
P S T
100
%
77
—
Zarezerwowany
—
100
—
78
—
Zarezerwowany
—
10000
—
79
—
Zarezerwowany
—
10
—
80
—
Zarezerwowany
—
10
—
Tab. 4-17: Przegląd parametrów rozszerzonych (1)
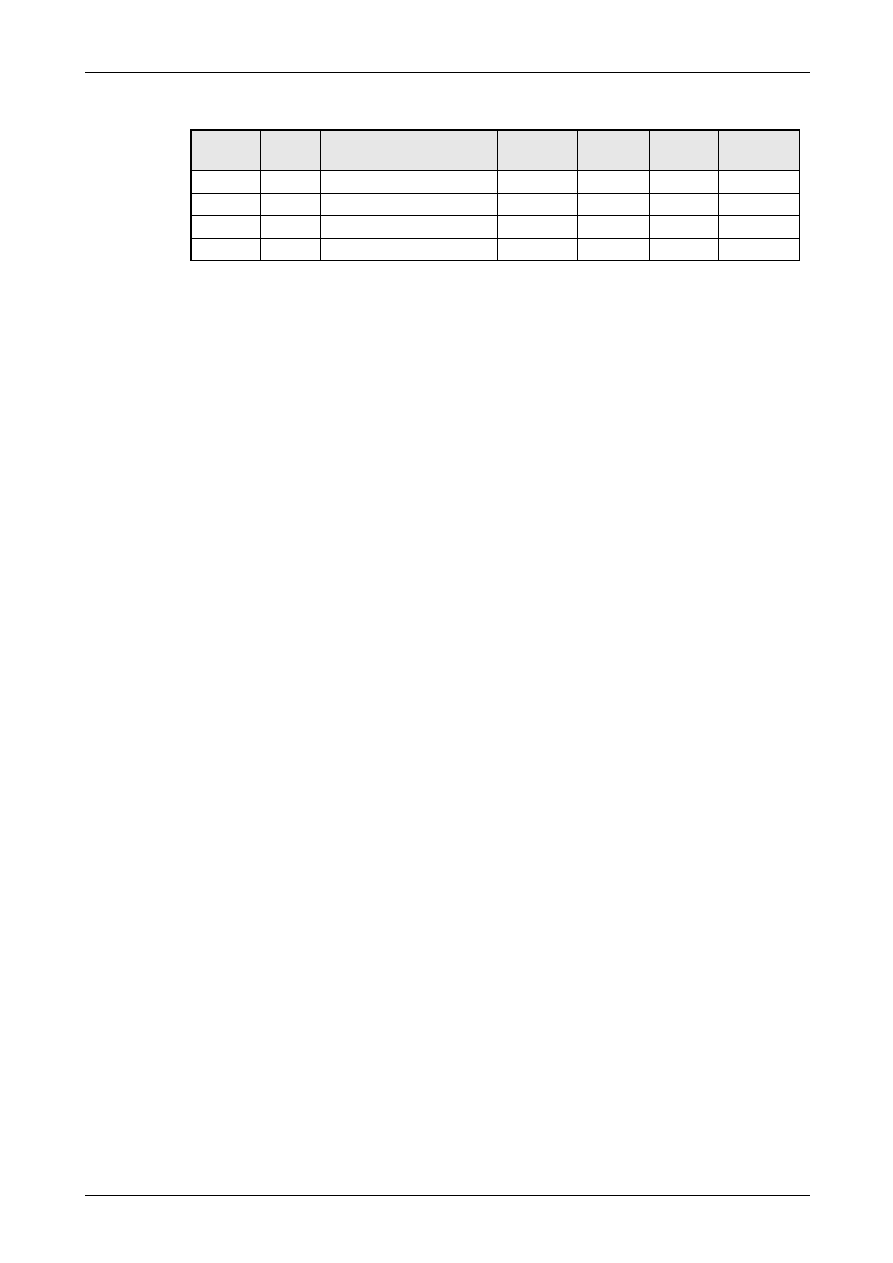
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 21
a
Aby nowe ustawienie danego parametru stało się aktywne, po jego zmianie konieczne jest
wyłączenie i ponowne załączenie zasilania.
b
Symbole w kolumnie "Tryb regulacji" oznaczają tryby, w których dany parametr ma zas-
tosowanie:
P: Regulacja położenia
S: Regulacja prędkości
T: Regulacja momentu obrotowego
c
Jednostka zależy od wartości parametru Pr. 65.
Numer
parametru
Symbol
Nazwa
Tryb regu-
lacji
b
Ustawienie
fabryczne
Jednostka
Ustawienie
użytkownika
81
—
Zarezerwowany
—
100
—
82
—
Zarezerwowany
—
100
—
83
—
Zarezerwowany
—
100
—
84
—
Zarezerwowany
—
0
—
Tab. 4-18: Przegląd parametrów rozszerzonych (2)
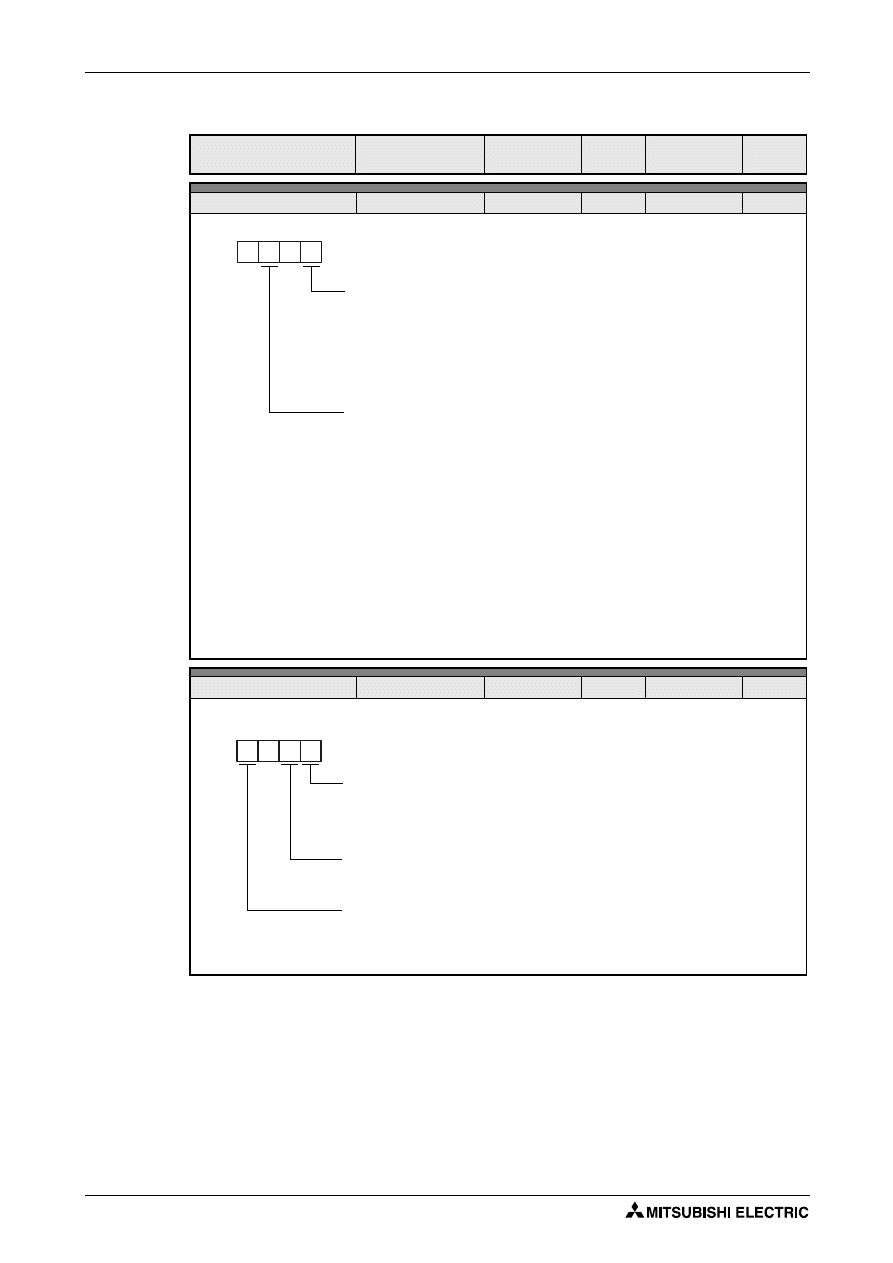
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 22
W poniższej tabeli szczegółowo omówiono poszczególne parametry:
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
0
STY
a
0000
0000 H–0605 H P S T
Wybór trybu regulacji i wybór opcjonalnego opornika hamującego
OSTRZEŻENIE:
Niewłaściwe ustawienie drugiej cyfry może być przyczyną przegrzania opornika hamującego i pożaru!
UWAGA:
W przypadku wyboru opornika niedopuszczalnego dla danego modelu serwowzmacniacza zostanie zgłoszony błąd
parametru (AL. 37).
1
OP1
a
0002
0000 H–1013 H P S T
Wybór funkcji 1: Wybór stałej czasowej filtra sygnału zdającego, wybór sygnału wyjściowego dla styku CN1B-19 i
wybór absolutnego systemu pozycjonowania.
Tab. 4-19: Szczegółowe omówienie parametrów (1)
0
0
Wybór trybu regulacji
0: Regulacja położenia
1: Regulacja położenia i prędkości
2: Regulacja prędkości
3: Regulacja prędkości i momentu obr.
4: Regulacja momentu obrotowego
5: Regulacja momentu obrotowego i
położenia
Wybór opcjonalnego opornika hamującego
0: brak
1: FR-RC, FR-BU
2: MR-RB032 / MR-RFH75-40
3: MR-RB12 / MR-RFH75-40
4: MR-RB32 / MR-RFH220-40
5: MR-RB30 / MR-RFH400-13
6: MR-RB50 / MR-RFH400-13
8: MR-RB31 / MR-RFH400-6,7
9: MR-RB51 / MR-RFH400-6,7
0
Filtr sygnału zadawania
0: brak
1: 1,777 ms
2: 3,555 ms
3: 5,333 ms
System pozycjonowania
0: System inkrementalny
1: System absolutny
Przypisanie sygnału do styku CN1B-19
0: Sygnał "Prędkość zero" (ZSP)
1: Sygnał blokady luzownika elektromagnetycznego (MBR)
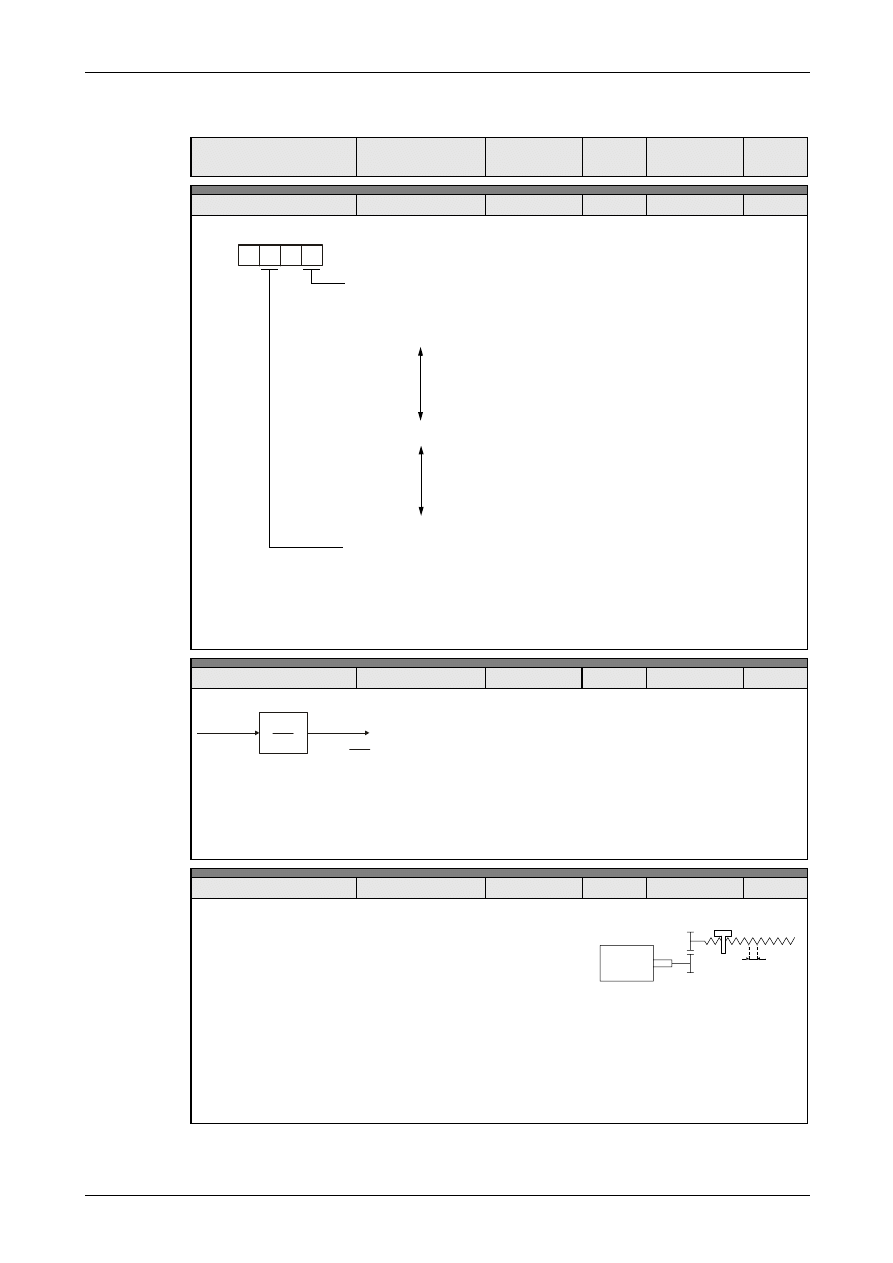
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 23
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
2
ATU
0105
0001 H–040F H P S
Autotuning
3
CMX
1
0–65535
P
Przekładnia elektroniczna (licznik współczynnika przełożenia)
UWAGA:
Wartość współczynnika należy dobrać z zakresu 1/50 < CMX/CDX < 500.
Ustawienie wartości CMX równej „0“ powoduje automatycznie przyjęcie wartości równej rozdzielczości enkodera
podłączonego serwosilnika, np. dla serwosilnika serii HC-MFS: 131072 impulsów/obrót.
OSTRZEŻENIE:
Nieprawidłowe ustawienie może wywołać nieprzewidywalnie wysokie obroty serwosilnika.
4
CDV
1
1–65535
P
Przekładnia elektroniczna (mianownik współczynnika przełożenia), (patrz parametr Pr. 3)
Przykład doboru: Wymagana rozdzielczość ruchu: 10 µm/impuls
Rozdzielczość = 1 µm × 10
STM
W tym przypadku: 10 µm = 1 µm × 10
1
⇒ STM = 1
Skok śruby: P
B
= 10 mm
Przekładnia: i = 2
Rozdzielczość enkodera = 131072 imp/obr.
Wyliczenie przełożenia przekładni elektronicznej:
Przykład:
Należy ustawić CMX = 16384 i CDV = 625.
Tab. 4-20: Szczegółowe omówienie parametrów (2)
0
0
0
Ustawienie poziomu reakcji systemu dla potrzeb autotuningu
Wartość Odpowiedź systemu
Częstotliwosć rezonansowa maszyny
1:
niska
15 Hz
2:
20 Hz
3:
25 Hz
4:
30 Hz
5:
35 Hz
6:
45 Hz
7:
55 Hz
8:
średnia
70 Hz
9:
85 Hz
A:
105 Hz
B:
130 Hz
C:
160 Hz
D:
200 Hz
E:
240 Hz
F:
wysoka
300 Hz
Tryb ustawiania parametrów regulatora
0: Tylko regulator prędkości (zadana wartość Pr. 6)
1: Autotuning 1: tryb normalny, regulator położenia i prędkości
2: Autotuning 2: Zadana wartość współczynnika momentów bezwładności (Pr. 34)
Automatycznie dobierany poziom szybkości reakcji systemu.
3: Tryb ręczny 1: Uproszczone ustawianie ręczne
4: Tryb ręczny 2: Ręczny dobór wszystkich parametrów
CMX
CDV
f
1
CMX
CDV
f
2
1
= f x
P = 10 mm
B
Servomotor
131072 Impulse/Umdrehung
Getriebe
i = 2
CMX
CMV
--------------
Rozdzielczoscenkodera Przekladnia
×
Przesuniecie na obrot (
µm )
--------------------------------------------------------------------------------------------------------
=
CMX
CMV
--------------
131072 2
×
10000
-----------------------------
16384
625
----------------
=
=
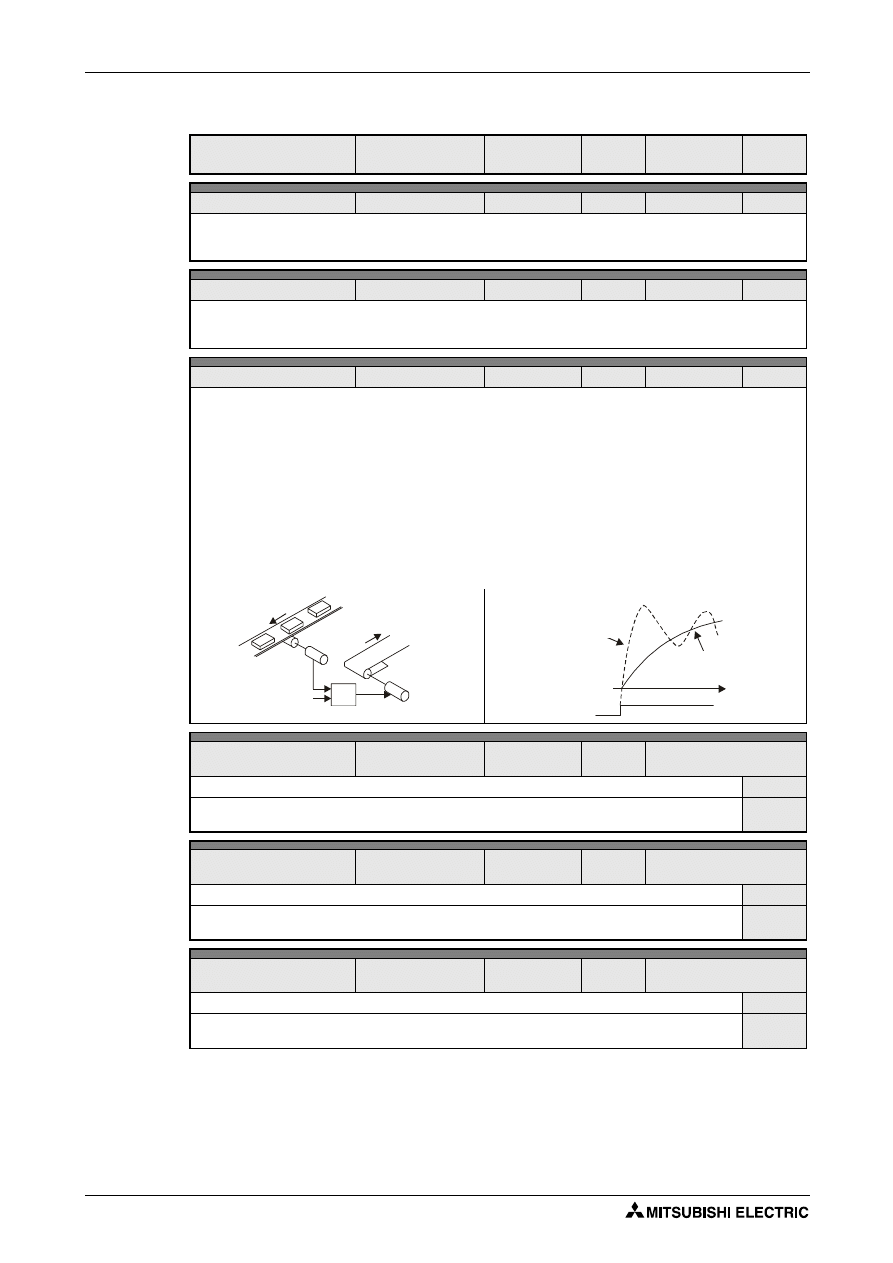
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 24
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
5
INP
100
impuls
0–10000
P
Szerokość strefy "Pozycjonowanie wykonane"
Wybiera się odległość od pozycji zadanej, wyrażoną w impulsach enkodera bez przemnożenia przez współczynnik
przekładni elektronicznej, poniżej której wydawany jest sygnał "Pozycjonowanie wykonane" (INP).
6
PG1
36
rad/s
4–2000
P
Współczynnik wzmocnienia regulatora położenia 1
Wyższa wartość poprawia odwzorowanie pozycji, lecz może powodować wibracje. Przy aktywnym autotuningu
(patrz Pr. 2) wartość jest optymalizowana automatycznie.
7
PST
3
ms
0–20000
P
Stała czasowa rozpędzania/hamowania w trybie regulacji położenia.
Służy do zadania stałej czasowej filtra dolnoprzepustowego, ograniczającego odpowiedź regulatora na sygnał
pozycji zadanej.
Przy pomocy Pr. 55 wybiera się użycie filtra wejściowego lub liniowe rozpędzanie/hamowanie. Przy wyborze linio-
wego rozpędzania/hamowania dopuszczalny zakres wartości to 0 - 10 ms. Większa wartość jest przyjmowana jako
równa 10ms.
UWAGA:
Opcji liniowego rozpędzania/hamowania nie należy używać jednocześnie z funkcją restartu po zaniku zasilania (Pr.
20), ani w trybach regulacji przełączanych do regulacji położenia (Pr. 0). W przeciwnym wypadku przy restarcie lub
w chwili przełączenia do trybu regulacji położenia serwosilnik zostanie gwałtownie zatrzymany.
Przykład:
Płynna synchronizacja taśmociągów będących w ruchu przy użyciu sygnałów z enkodera inkrementalnego i
zewnętrznego polecenia synchronizacji.
8
SC1
100
obr/min
0–max. prędkość serwo-
silnika
Wartość prędkości zaprogramowanej 1
S
Ograniczenie prędkości 1
(maksymalna wartość prędkości 1)
T
9
SC2
500
obr/min
0–max. prędkość serwo-
silnika
Wartość prędkości zaprogramowanej 2
S
Ograniczenie prędkości 2
(maksymalna wartość prędkości 2)
T
10
SC3
1000
obr/min
0–max. prędkość serwo-
silnika
Wartość prędkości zaprogramowanej 3
S
Ograniczenie prędkości 3
(maksymalna wartość prędkości 2)
T
Tab. 4-21: Szczegółowe omówienie parametrów (3)
Start
Inkremental-
geber
Servoverstärker
Servomotor
Enkoder
Serwowzmacniacz Serwosilnik
Start
ON
OFF
mit Einstellung
Beschl.-/Verzögerungszeit
ohne Einstellung
Beschl.-/Verzögerungszeit
t
Servomotor
Geschwindigkeit
Bez ustawienia stałej
czasowej rozpędzania/
hamowania
Po ustawieniu stałej
czasowej rozpędzania/
hamowania
Prędkość serwosilnika
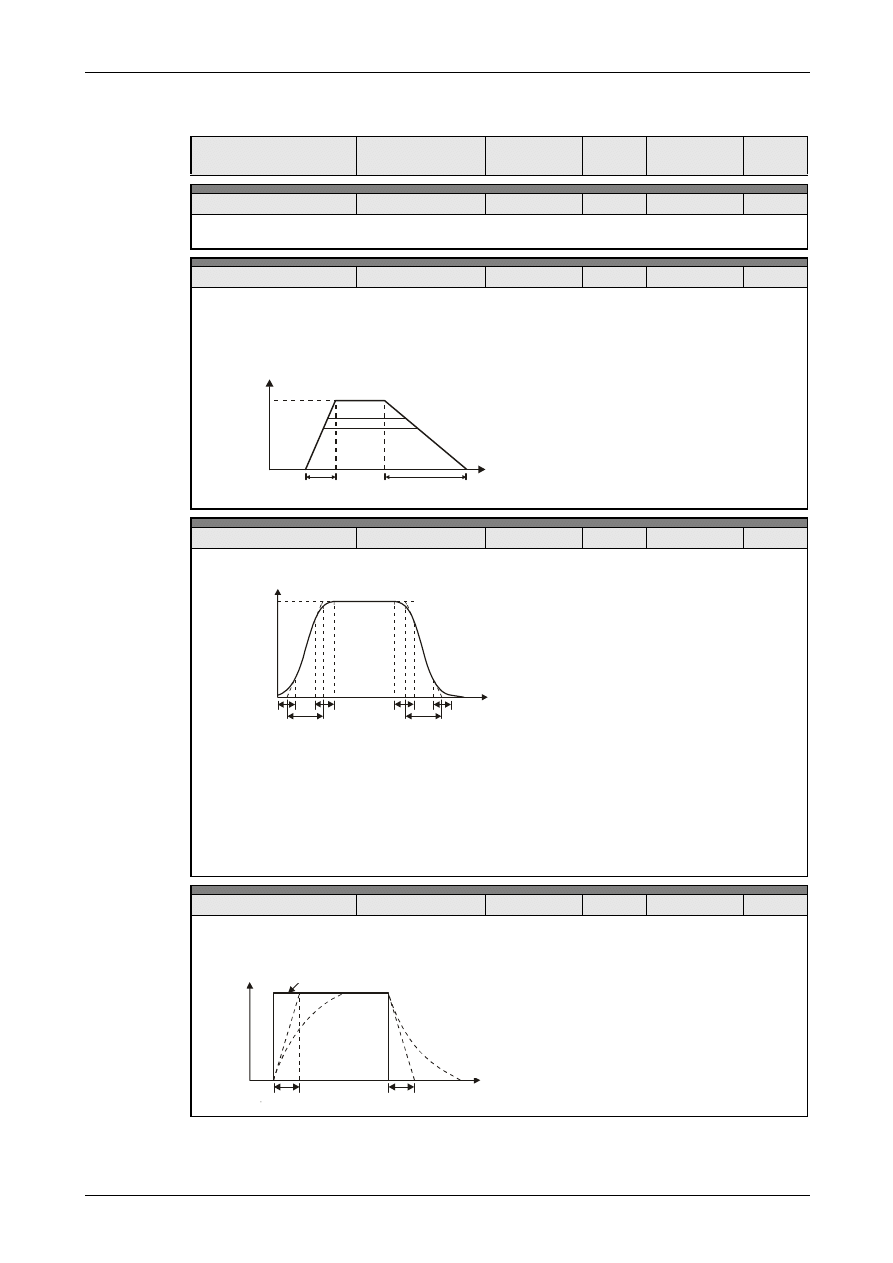
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 25
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
11
STA
0
ms
0–20000
S T
Czas rozpędzania
Ustawienie czasu, w ciągu którego serwosilnik jest rozpędzany liniowo od zera do prędkości znamionowej.
12
STB
0
ms
0–20000
S T
Czas hamowania
Ustawienie czasu, w ciągu którego serwosilnik jest hamowany liniowo od prędkości znamionowej do zera .
Jeżeli zadana prędkość jest niższa od znamionowej, czas rozpędzania lub hamowania będzie proporcjonalnie
krótszy. Np. dla prędkości znamionowej 3000 obr/min i STA=STB=3000, czas rozpędzania/hamowania do/od pręd-
kości 1000 obr/min wyniesie 1s.
13
STC
0
ms
0–1000
S T
Sinoidalna krzywa rozpędzania/ hamowania (służy do płynnego rozruchu/zatrzymania). Wartość parametru określa
czas nieliniowego odcinka charakterystyki rozpędzania/ hamowania.
STA: Czas rozpędzania (Pr. 11)
STB: Czas hamowania (Pr. 12)
STC: Czas rozpędzania/ hamowania dla nieliniowego odcinka charakterystyki sinoidalnej (Pr. 13)
Zbyt duża wartość STA lub STB może powodować nieprawidłowe wyliczenie czasu odcinka nieliniowego. Górna
granica wartości STC wynosi:
Dla rozpędzania: 2000000 / STA, dla hamowania: 2000000 / STB
Przykład: STA = 20000 ms, STB = 5000 ms, STC = 200 ms
Dopuszczalna wartość STC dla rozpędzania: 2000000/ 20000=100 ms, więc ustawienie 200 ms jest zbyt duże.
Dopuszczalna wartość STC dla hamowania: 2000000/5000=400ms. Ustawiona wartosć 200 ms jest dopuszczalne.
14
TQC
0
ms
0–20000
T
Filtr sygnału zadawania momentu obrotowego.
Wartość parametru określa stałą czasową odpowiedzi na skokową zmianę analogowego sygnału zadawania
momentu obrotowego.
Tab. 4-22: Szczegółowe omówienie parametrów (4)
Geschwindigkeit
Stillstand
Nenn-
drehzahl
über Parameter 11
einstellen
über Parameter 12
einstellen
Zeit
0
Prędkość
znamionowa
Czas
Richtgeschwindigkeit
Stillstand
STC
STC
STC
STC
STA
STB
S
e
rv
omot
or
G
es
ch
w
in
d
igk
ei
t
Zeit
Pr
ędko
ść
se
rw
os
ilnik
a
Czas
Drehmoment
Drehmomentbefehl
Nach dem
Filtern
TQC
TQC
Zeit
Czas
Z filtrem
Wartość zadana momentu
Moment
TQC - stała czasowa zadawania momentu
Prędkość
Zgodnie z war-
tością Pr. 11
Zgodnie z war-
tością Pr. 12
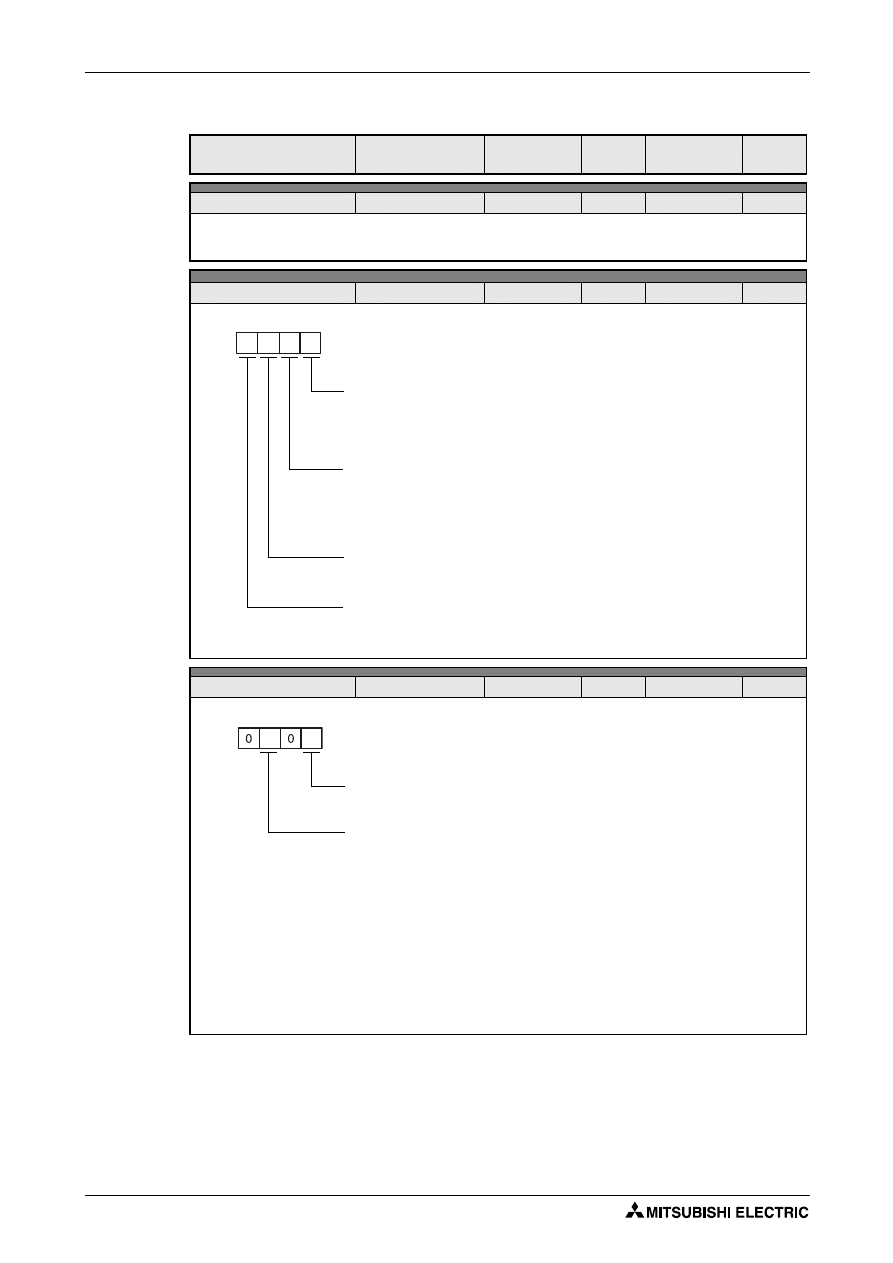
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 26
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
15
SNO
a
0
ms
0–31
P S T
Numer stacji dla komunikacji szeregowej.
Każdy serwowzmacniacz w systemie komunikacji powinien mieć przypisany unikalny numer. Jeżeli dwu lub więcej
serwowzmacniaczom zostanie przypisany ten sam numer, komunikacja będzie niemożliwa.
16
BPS
a
0000
0000 H–1113 H
P S T
Prędkość komunikacji RS232C/RS422/ Kasowanie pamięci alarmów
17
MOD
0100
0000 H–0B0B H P S T
Wybór funkcji wyjścia analogowego
Tab. 4-23: Szczegółowe omówienie parametrów (5)
Wybór prędkości komunikacji szeregowej przez interfejs RS232C/RS422
0: 9600 Bit/s
1: 19200 Bit/s
2: 38400 Bit/s
3: 57600 Bit/s
Kasowanie pamięci alarmów
0: Pamięć nie jest kasowana
1: Pamięć zostanie skasowana przy najbliższym załączeniu zasilania.
Jednocześnie wartość parametru zostanie automatycznie przestawiona na 0.
Wybór interfejsu komunikacyjnego: RS232C lub RS422
0: Komunikacja w standardzie RS232C
1: Komunikacja w standardzie RS422
Zwłoka odpowiedzi
0: brak
1: Odpowiedź po czasie zwłoki nie mniejszym, niż 800
µs.
MO1
Ustawienia jak dla MO2
MO2:
0: Prędkość serwosilnika (
±8 V/prędkość maksymalna)
1: Moment obrotowy (
±8 V/moment maksymalny)
2: Prędkość serwosilnika (+8 V/prędkość maksymalna)
3: Moment obrotowy (+8 V/moment maksymalny)
4: Wartość zadana prądu (
±8 V/prąd maksymalny)
5: Częstotliwość zadającego ciągu impulsów (
±8 V/500 kHz)
6: Uchyb (
±10 V/128 impulsów)
7: Uchyb (
±10 V/2048 impulsów)
8: Uchyb (
±10 V/8192 impulsów)
9: Uchyb (
±10 V/32768 Impulse)
A: Uchyb (
±10 V/131072 impulsów)
B: Napięcie w stopniu pośrednim DC (+8 V/400V)
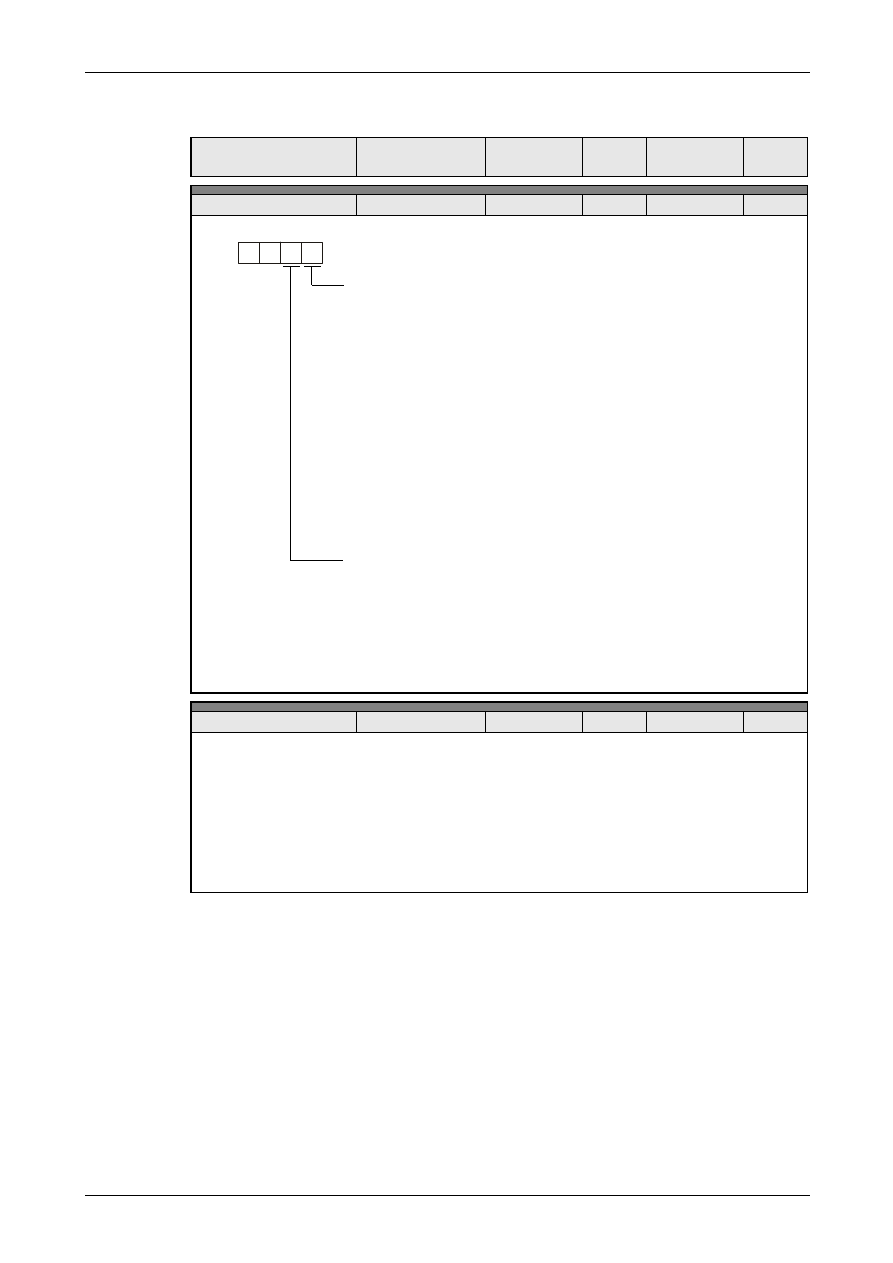
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 27
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
18
DMD
a
0000
0000 H–001F H P S T
Wybór komunikatu stanu, wyświetlanego po załączeniu zasilania
19
BLK
a
0000
0000 H–000C H P S T
Parametr zabezpieczenia przed zapisem
Zależnie od ustawienia możliwe jest wprowadzenie blokady odczytu lub zapisu określonej grupy parametrów (patrz
strona Str. 4-16
0000: Odczyt i zapis parametrów 0–19
000A: Odczyt i zapis parametru 19
000B: Odczyt parametrów 0–49 oraz zapis parametrów 0–19
000C: Odczyt i zapis parametrów 0–49
000E: Odczyt i zapis parametrów 0–84
100B: Odczyt parametrów 0–19 i zapis parametru 19
100C: Odczyt parametrów 0–49 i zapis parametru 19
100E: Odczyt parametrów 0–84 i zapis parametru 19
Tab. 4-24: Szczegółowe omówienie parametrów (6)
0
0
0: Komunikat stanu w zależności od trybu regulacji:
Regulacja położenia: impulsy enkodera
Regulacja położenia/prędkości: impulsy enkodera/prędkość serwosilnika
Regulacja prędkości: prędkość serwosilnika
Regulacja prędkości/momentu: prędkość/napięcia zadawania momentu
Regulacja momentu: napięcia zadawania momentu
Regulacja momentu/położenia: napięcia zadawania momentu/impulsy enkodera
1: Komunikat stanu w zależności od czwartej cyfry danego parametru (patrz wyżej)
Komunikat stanu, wyświetlany po załączeniu zasilania
0: Impulsy ekodera
1: Prędkość serwosilnika
2: Uchyb (ilość impulsów)
3: Impulsy zadawania
4: Częstotliwość zadającego ciągu impulsów
5: Napięcie analogowego zadawania prędkości (przy regulacji prędkości)
Napięcie analogowego ograniczenia prędkości (przy regulacji momentu)
6: Napięcie analogowego zadawania momentu (przy regulacji momentu)
Napięcie analogowego ograniczenia momentu (przy regulacji prędkości)
7: Współczynnik obciążenia opornika hamującego
8: Wartość skuteczna momentu obrotowego
9: Wartość szczytowa momentu obrotowego
A: Wartość chwilowa momentu obrotowego
B: Pozycja absolutna wewnątrz obrotu, niższe pozycje
C:Pozycja absolutna wewnątrz obrotu, wyższe pozycje
D:Licznik pozycji absolutnej
E: Współczynnik momentu bezwładności obciążenia
F: Napięcie w stopniu pośrednim DC
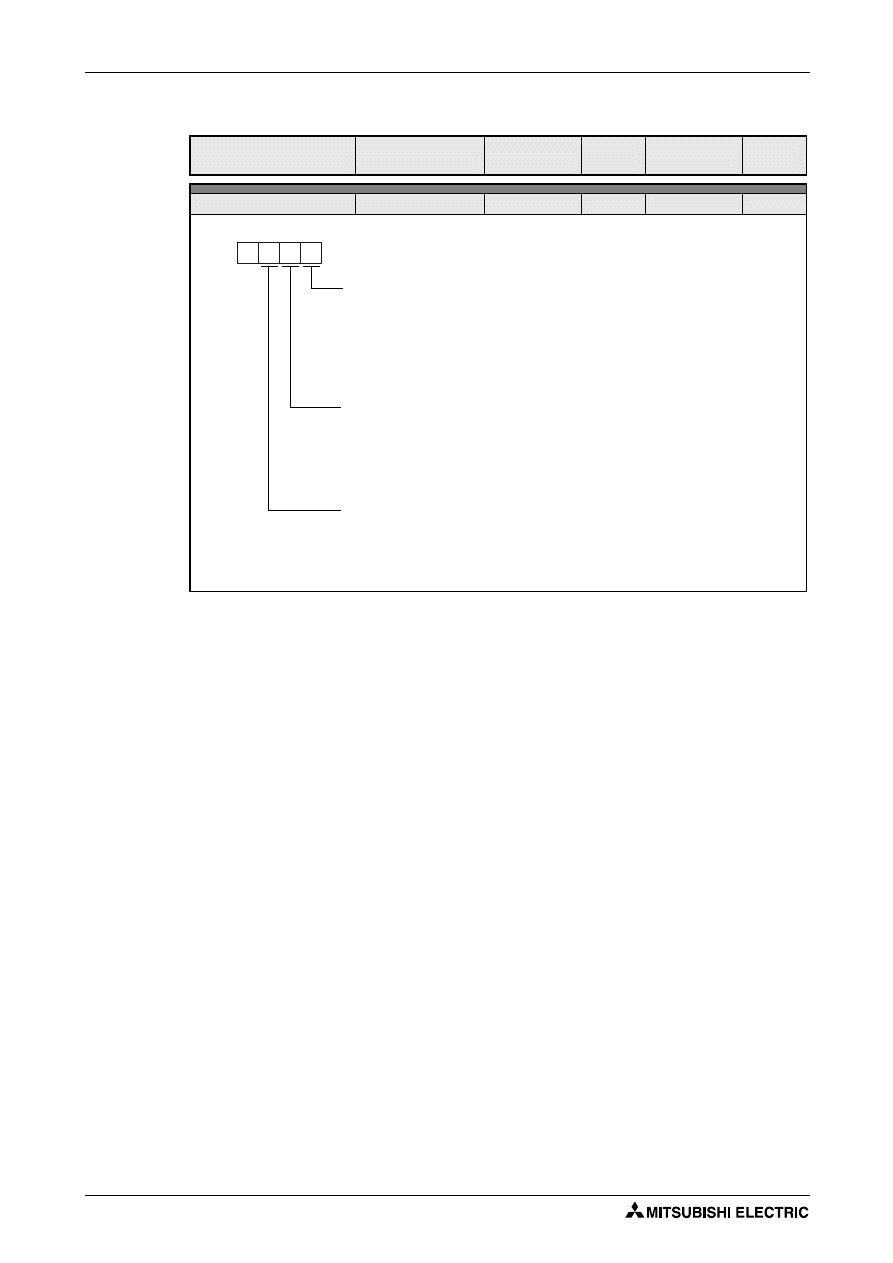
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 28
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
20
OP2
a
0000
0000 H–0111 H
P S
Wybór funkcji 2
Tab. 4-25: Szczegółowe omówienie parametrów (7)
0
Przy regulacji prędkości:
Restart po chwilowym zaniku zasilania
0: Restart nie jest wykonywany
1: Restart jest wykonywany
Jeżeli serwosilnik w trybie regulacji prędkości został zatrzymany wskutek zaniku lub
zbyt niskiego napięcia zasilania (Alarm AL.10) po czym napięcie wróciło do normy,
funkcja restartu uruchomi ponownie serwosilnik, jeśli tylko sygnał startu zostanie
podtrzymany lub ponownie podany, bez konieczności resetowania alarmu.
W trybie regulacji położenia:
Tłumienie mikrowibracji zatrzymanego serwosilnika
Funkcja jest aktywna tylko wtedy, gdy wartość parametru Pr. 2 wynosi „0400“.
0: bez tłumienia
1: z tłumieniem
Przy regulacji prędkości:
Servo-lock zatrzymanego silnika
W trybie regulacji prędkości po zatrzymaniu silnika serwowzmacniacz jest przełączany
w tryb servo-lock, tj. utrzymuje serwosilnik w położeniu, w którym został zatrzymany.
0: aktywny
1: nie aktywny
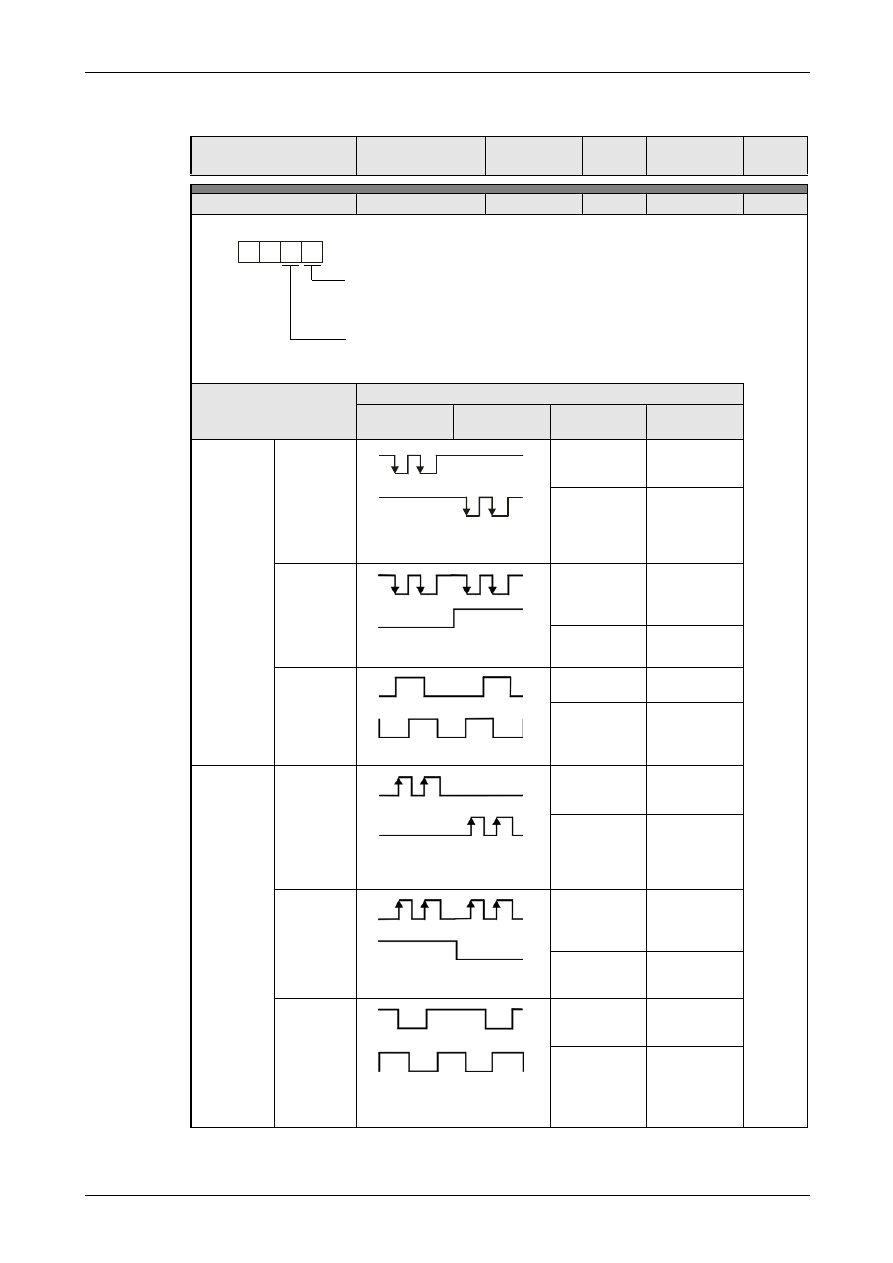
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 29
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
21
OP3
a
0000
0000 H–0012 H P
Wybór funkcji 3 (forma zadającego ciągu impulsów)
Zadający ciąg impulsów
Sygnał wejściowy
Obroty w pra-
wo
Obroty w lewo
Otwarty kolek-
tor
Wejście różni-
cowe
Sterowanie
opadającym
frontem
impulsu
Ciąg dla
obrotów w
prawo
PP
PG-PP
Ciąg dla
obrotów w
lewo
(Wartość
0010)
NP
NG-NP
Ciąg
impulsów i
sygnał
kierunku
PP
PG-PP
(Ustawienie
0011)
NP
NG-NP
Ciąg dwufa-
zowy, faza A
PP
PG-PP
Ciąg dwufa-
zowy, faza B
(Ustawienie
0012)
NP
NG-NP
Sterowanie
narastającym
frontem
impulsu
Ciąg dla
obrotów w
prawo
PP
PG-PP
Ciąg dla
obrotów w
lewo
(Ustawienie
0000)
NP
NG-NP
Ciąg
impulsów i
sygnał
kierunku
PP
PG-PP
(Ustawienie
0001)
NP
NG-NP
Ciąg
impulsów
fazy A
PP
PG-PP
Ciąg
impulsów
fazy B
(Ustawienie
0002)
NP
NG-NP
Tab. 4-26: Szczegółowe omówienie parametrów (8)
0
0
Wybór logiki zadającego ciągu impulsów (patrz poniższa tabela)
0: Logika dodatnia (sterowanie narastającym zboczem impulsu)
1: Logika ujemna (sterowanie opadającym zboczem impulsu)
Wybór formy zadającego ciągu impulsów (patrz poniższa tabela)
0: Dwa ciągi impulsów dla kierunku w prawo/ w lewo
1: Ciąg impulsów plus sygnał kierunku
2: Dwufazowy ciąg impulsów fazaA/faza B
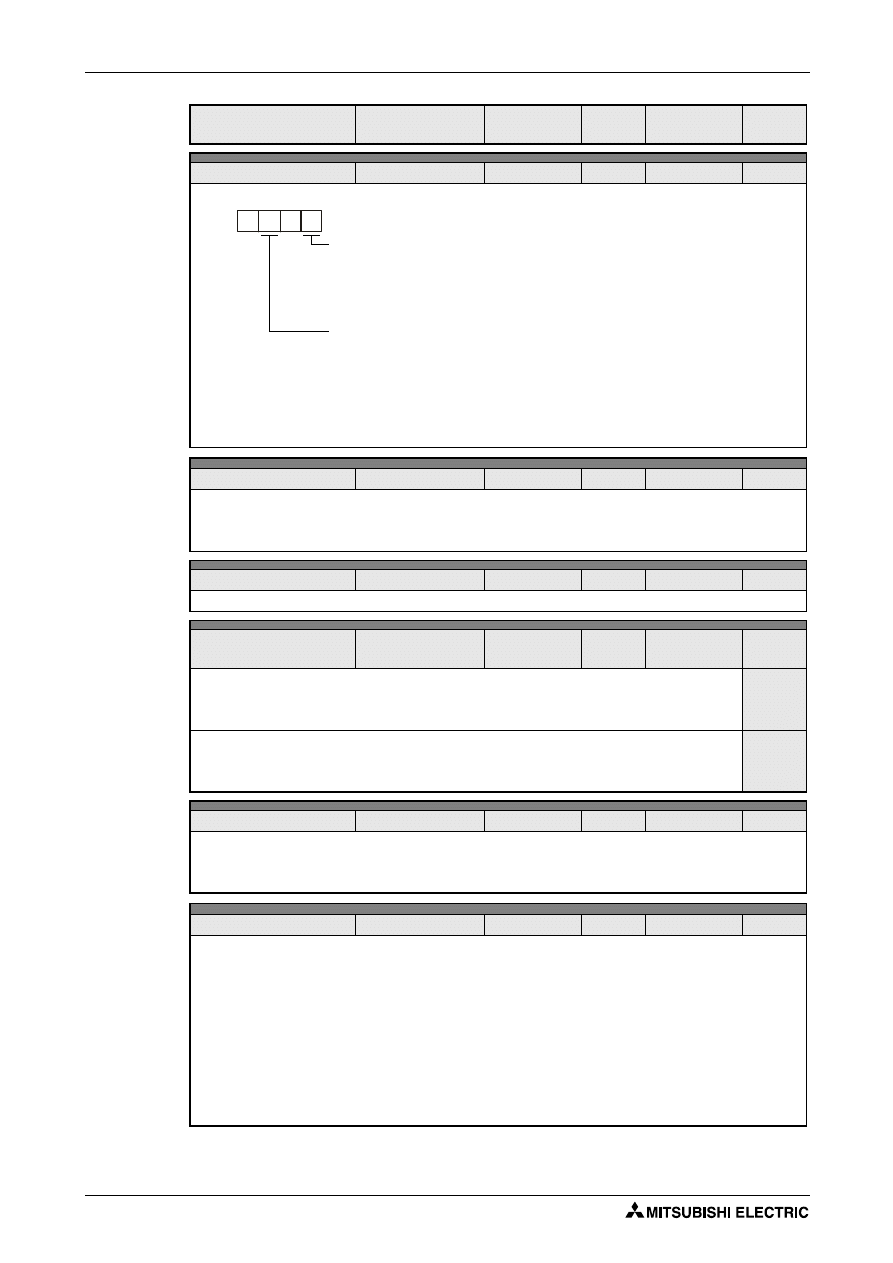
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 30
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
22
OP4
a
0000
0000 H–0401 H P S T
Wybór funkcji 4
23
FFC
0
%
0–100
P
Wartosć wzmocnienia gałęzi sprzężenia w przód (Feed forward).
Sprzężenie w przód służy do minimalizacji statycznego uchybu pozycjonowania.
Przy ustawieniu 100% można oczekiwać redukcji ilości impulsów błędu przy pracy ze stałą prędkością niemal do 0.
zarazem jednak podczas nagłego rozpędzania i hamowania mogą pojawić się lub powiększyć przerzuty.
24
ZSP
50
obr/min
0–10000
P S T
Parametr określa wartość prędkości serwosilnika, poniżej której wydawany jest sygnał „Prędkość zero“ (ZSP)
25
VCM
0
obr/min
0
1–10000
Prędkość przy maksymalnej wartości analogowego sygnału zadawania.
Parametr określa prędkość serwosilnika przy maksymalnej wartości (10V) analogowego sygnału
zadawania prędkości VC w trybie regulacji prędkości
Przy ustawieniu „0“ jako maksymalna przyjmowana jest prędkość znamionowa serwosilnika.
S
Ograniczenie prędkości
Parametr określa prędkość serwosilnika przy maksymalnej wartości (10V) analogowego sygnału
ograniczenia prędkośc i VLA w trybie regulacji momentu.
Przy ustawieniu „0“ jako wartość ograniczenia przyjmowana jest prędkość znamionowa serwosilnika.
T
26
TLC
100
%
0–1000
T
Moment obrotowy przy maksymalnej wartości analogowego sygnału zadawania
Parametr określa moment obrotowy serwosilnika przy maksymalnej wartości (8V) analogowego sygnału zadawania
momentu TLA w trybie regulacji momentu, jako % od wartości maksymalnej. Np. przy ustawieniu 50 przy napięciu
+8V będzie generowany moment równy 50% momentu maksymalnego serwosilnika.
27
ENR
a
4000
Imp./obr.
1–32768
P S T
Rozdzielczość wyjścia emulowanych impulsów enkodera.
Parametr określa ilość impulsów (faza A/B), wydawanych na obrót enkodera na emulowanym wyjściu enkodera,
lub liczbę, przez którą będzie dzielona rzeczywista ilość impulsów z enkodera, w zależności od wartości Pr. 54.
Należy uzyskać liczbę 4-krotnie większą, niż żądana ilość impulsów wyjściowych w fazie A/B (rzeczywista
wydawana ilość impulsów na obrót jest 4-krotnie niższa od ilości, wynikającej z parametru). Przy pomocy Pr. 54
można dobrać zależność między kierunkiem obrotów silnika i kolejnością faz wyjściowego ciągu impulsów oraz
sposób obliczania ilości impulsów wyjściowych. Maksymalna częstotliwość impulsów wyjściowych wynosi 1,3 MHz
(z uwzględnieniem przemnożenia przez 4).
Przykład ustawień:
Przy fabrycznej wartości Pr. 54 (0mmm) oraz wartości Pr. 27 = 5600 na każdy obrót serwosilnika na wyjściu będzie
wydawane 5600 / 4 = 1400 impulsów.
Przy ustawieniu Pr. 54 = 1mmm irzeczywista ilość impulsów z enkodera jest dzielona przez wartość Pr. 27.
Np. dla Pr. 27 = 8 wydawana będzie ilość (131072 / 8) x 1 / 4 = 4096 impulsów na obrót serwosilnika.
Tab. 4-27: Szczegółowe omówienie parametrów (9)
0
0
0
Tylko dla regulacji prędkości lub położenia:
Sposób zatrzymania na wyłączniku krańcowym LSP/LSN
0:Zatrzymanie natychmiastowe (max. hamowanie)
1: Zatrzymanie zgodne z wybranym czasem hamowania:
- w trybie regulacji położenia - parametr Pr. 7
- w trybie regulacji prędkości - parametr Pr. 11
Filtr wejściowy sygnałów analogowych VC i VLA:
Służy do tłumienia zakłóceń i szumów w analogowych sygnałach zadawania/ograni-
czenia prędkości. Wyższe wartości obniżają szybkość reakcji serwonapędu.
0: Stała czasowa filtra 0 ms
1: Stała czasowa filtra 0,444 ms
2: Stała czasowa filtra 0,888 ms
3: Stała czasowa filtra 1,777 ms
4: Stała czasowa filtra 3,555 ms
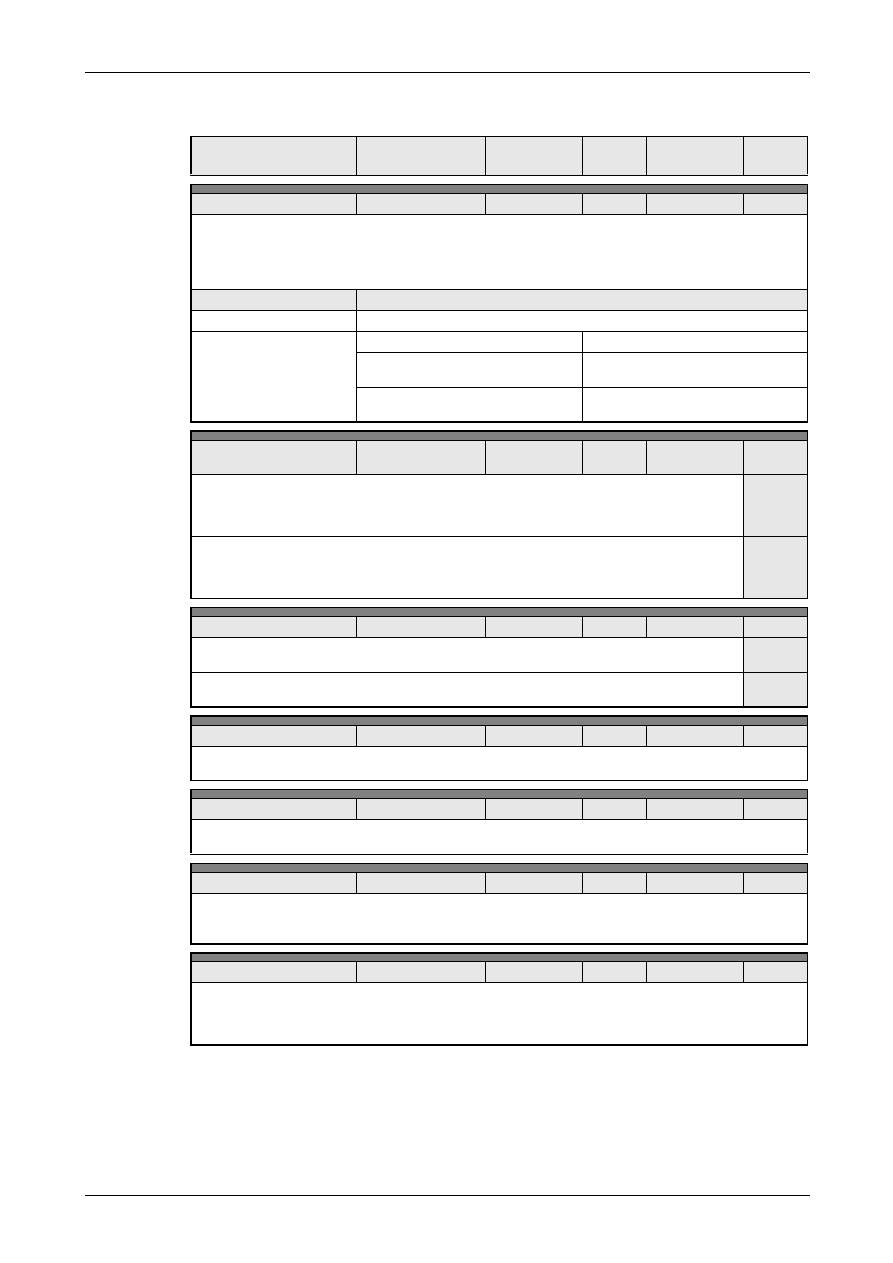
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 31
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
28
TL1
100
%
0–100
P S T
Wewnętrzne ograniczenie momentu 1
Parametr określa wartość ograniczenia momentu silnika w % od maksymalnej wartości momentu obrotowego ser-
wosilnika. Ustawienie 0 uniemożliwia generowanie momentu obrotowego.
W przypadku użycia analogowego monitorowania momentu, ustawionej wartości będzie odpowiadać napięcie
wyjściowe +8 V.
Sygnał TL
Ograniczenie momentu obrotowego
OFF
Wewnętrzne ograniczenie momentu (wartosć parametru Pr. 28 lub Pr. 76)
ON
Zależność wartosci ograniczeń
Aktywne ograniczenie momentu
Analogowe ograniczenie momentu <
Wewnętrzne ograniczenie momentu
Analogowe ograniczenie momentu
Analogowe ograniczenie momentu >
Wewnętrzne ograniczenie momentu
Wewnętrzne ograniczenie momentu
29
VCO
Kalibracja fab-
ryczna
mV
−999–999
Przesunięcie zera analogowego sygnału zadawania prędkości (VC)
Służy do kalibrowania analogowego zadajnika prędkości. Np. jeżeli przy podanym sygnale startu w
prawo (ST1) i napięciu 0V na zacisku VC silnik obraca się w prawo, należy wprowadzić wartość
ujemną. Jeżeli używana jest funkcja automatycznej kalibracji wartość ustawiana jest automatycznie.
S
Przesunięcie zera analogowego sygnału ograniczeniania prędkości (VLA)
Służy do kalibrowania analogowego ogranicznika prędkości. Np. jeżeli przy podanym sygnale wyboru
obrotów w prawo (RS1) i napięciu 0V na VLA silnik obraca się w prawo, należy wprowadzić wartość
ujemną. Jeżeli używana jest funkcja automatycznej kalibracji wartość ustawiana jest automatycznie.
T
30
TLO
0
mV
−999–999
Przesunięcie zera analogowego sygnału zadawania momentu.
Służy do kalibrowania analogowego zadajnika momentu (TC)
T
Przesunięcie zera analogowego sygnału ograniczenia momentu.
Służy do kalibrowania analogowego ogranicznika momentu (TLA)
S
31
MO1
0
mV
−999–999
P S T
Przesunięcie zera wyjścia analogowego 1
Służy do kalibrowania wyjścia analogowego 1 (MO1)
32
MO2
0
mV
−999–999
P S T
Przesunięcie zera wyjścia analogowego 2
Służy do kalibrowania wyjścia analogowego 2 (MO2)
33
MBR
100
ms
0–1000
P S T
Synchronizacja czasowa luzownika elektromagnetycznego
Wartość parametru określa zwłokę czasową (T
b
) pomiędzy podaniem sygnału blokady luzownika (MBR) i
odcięciem wyjścia obwodu mocy serwowzmacniacza
34
GD2
70
x 0,1
0–3000
P S
Współczynnik momentu bezwładności obciążenia.
Wartość parametru określa stosunek momentu bezwłądności obciążenia do momentu bezwłądności serwosilnika.
Gdy używany jest autotuning w trybie 1 lub w trybie interpolacji, wpisywana jest automatycznie wartość określona
przez serwowzmacniacz, w zakresie pomiędzy 0 i 1000.
Tab. 4-28: Szczegółowe omówienie parametrów (10)
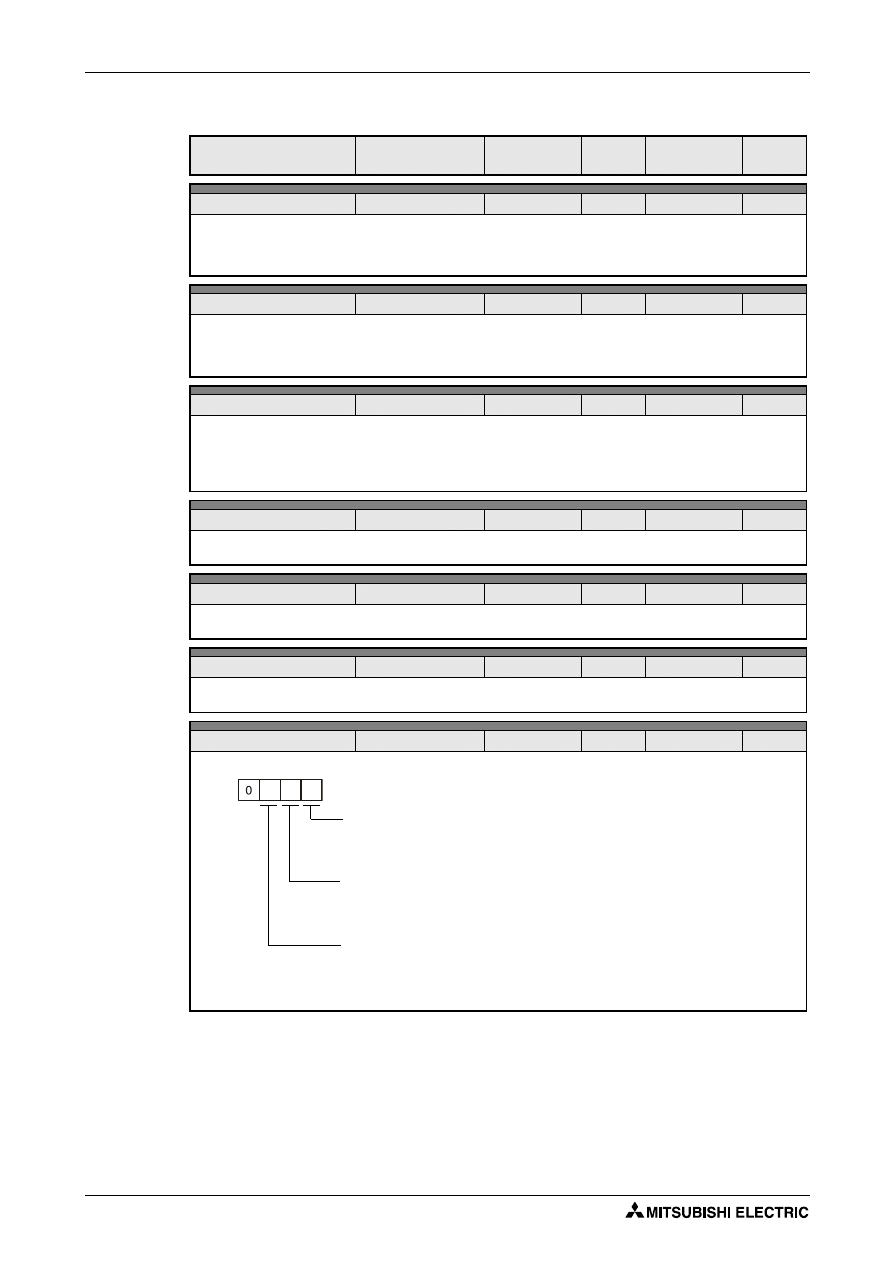
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 32
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
35
PG2
35
rad/s
0–1000
P
Współczynnik wzmocnienia regulatora położenia 2
Wyższa wartość parametru poprawia odpowiedź systemu na zakłócenia ze strony obciążenia, lecz podwyższa
ryzyko powstawania wibracji i/lub hałasu. Gdy używany jest autotuning w trybie 1 i 2 lub trybie interpolacji (patrz Pr.
2), wpisywana jest automatycznie wartość określona przez serwowzmacniacz.
36
VG1
177
rad/s
20–8000
P S
Współczynnik wzmocnienia regulatora prędkości 1
Zazwyczaj wartość fabryczna parametru nie musi być zmieniana. Wyższa wartość parametru poprawia odpowiedź
systemu, lecz podwyższa ryzyko powstawania wibracji i/lub hałasu. Gdy używany jest autotuning w dowolnym try-
bie (patrz Pr. 2), wpisywana jest automatycznie wartość określona przez serwowzmacniacz.
37
VG2
817
rad/s
20–20000
P S
Współczynnik wzmocnienia regulatora prędkości 2
Wartość parametru należy modyfikować, gdy występują wibracje w systemie o niskiej sztywności mechanicznej lub
ze znacznymi luzami. Wyższa wartość podwyższa ryzyko powstawania wibracji i/lub hałasu. Gdy używany jest
autotuning w trybie 1 i 2 lub trybie interpolacji (patrz Pr. 2), wpisywana jest automatycznie wartość określona przez
serwowzmacniacz.
38
VIC
48
ms
1–1000
S
Stała czasowa członu I (całkującego) regulatora prędkości
Gdy używany jest autotuning (patrz Pr. 2) wartość parametru jest optymalizowana automatycznie.
39
VDC
980
0–1000
P S
Stała czasowa członu D(różniczkowego) regulatora prędkości.
Gdy używany jest autotuning (patrz Pr. 2) wartość parametru jest optymalizowana automatycznie.
40
0
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
41
DIA
a
0000
0000 H–0111 H
P S T
Automatyczny sygnał wejściowy (SON/LSP/LSN)
Tab. 4-29: Szczegółowe omówienie parametrów (11)
Sygnał „Servo ON“ (SON)
0: Podawany z zewnątrz (styk zwierny)
1: podawany automatycznie przez serwowzmacniacz(bez połączeń zewnętrznych)
Wyłącznik krańcowy dla obrótów w lewo (LSN)
0: Podawany z zewnątrz (styk zwierny)
1: podawany automatycznie przez serwowzmacniacz(bez połączeń zewnętrznych)
Wyłącznik krańcowy dla obrótów w prawo (LSP)
0: Podawany z zewnątrz (styk zwierny)
1: podawany automatycznie przez serwowzmacniacz(bez połączeń zewnętrznych)
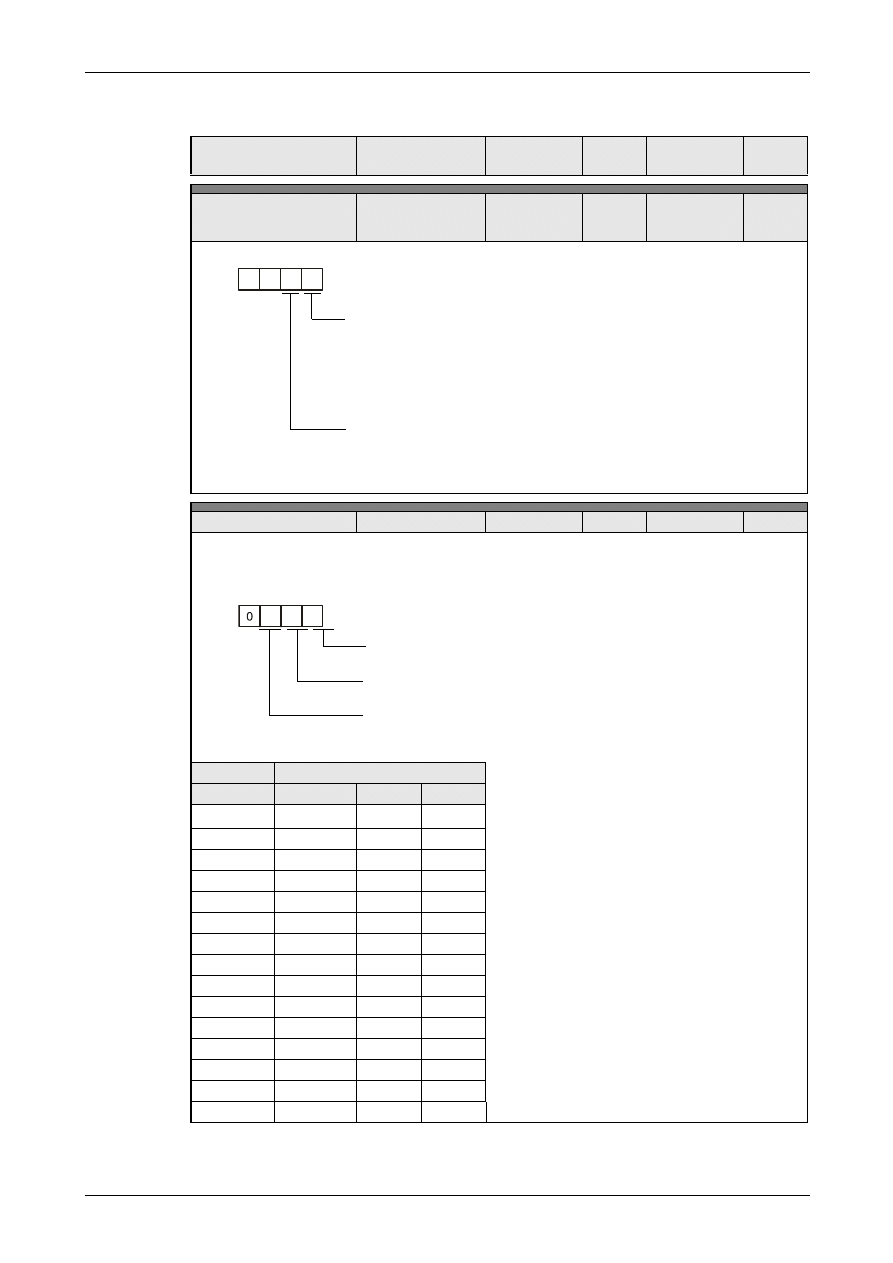
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 33
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
42
DI1
a
0003
0000 H–0015 H
P/S
S/T
T/P
Wybór sygnału wejściowego 1
43
DI2
a
0111
0000 H–0EEE H P S T
Wybór sygnału wejściowego 2 (Styk CN1B-5)
Do styku CN1B-5 można przypisać dowolny z poniższych sygnałów wejściowych. Należy zwrócić uwagę, że wyko-
rzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz.
W poniższej tabeli przedstawiono wartości parametru, odpowiadające przypisaniu podanych sygnałów wejścio-
wych w poszczególnych trybach regulacji:
Wartość
Tryb regulacji
b
P
S
T
0
—
—
—
b
P: Regulacja położenia
1
SON
SON
SON
S: Regulacja prędkości
2
RES
RES
RES
T: Regulacja momentu
3
PC
PC
—
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr.
42 przypisano sygnał LOP do styku CN1B-5.
4
TL
TL
TL
5
CR
CR
CR
6
—
SP1
SP1
7
—
SP2
SP2
8
—
ST1
RS2
9
—
ST2
RS1
A
—
SP3
SP3
B
CM1
—
—
C
CM2
—
—
D
TL1
TL1
TL1
E
CDP
CDP
CDP
Tab. 4-30: Szczegółowe omówienie parametrów (12)
0
0
Wybór styków wejściowych dla sygnału zmiany trybu regulacji (LOP)
0: CN1B-5
1: CN1B-14
2: CN1A-8
3: CN1B-7
4: CN1B-8
5: CN1B-9
Wybór sposobu kasowania impulsów uchybu (CR)
0: Licznik impulsów uchybu jest kasowany narastającym zboczem sygnału CR.
1: Licznik impulsów uchybu jest kasowany stale przy obecnym sygnale CR.
Regulacja położenia
Regulacja momentu
Regulacja prędkości
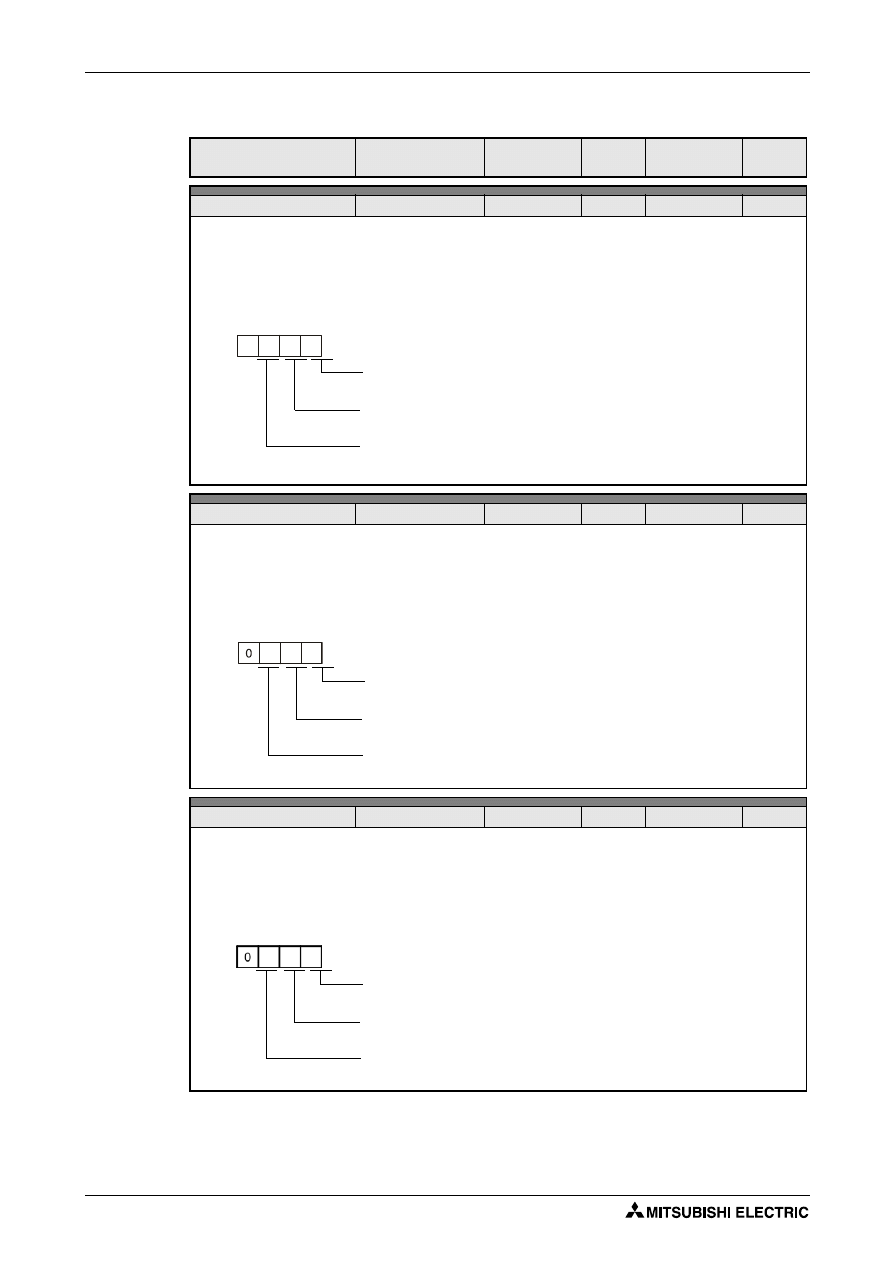
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 34
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
44
DI3
a
0222
0000 H–0EEE H P S T
Wybór sygnału wejściowego 3 (Styk CN1B-14)
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr. 42 przypisano sygnał LOP do styku CN1B-14.
Do styku CN1B-14 można przypisać dowolny z sygnałów wejściowych, opisanych w tabeli powyżej.. Należy
zwrócić uwagę, że wykorzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz.
Możliwe do przypisania sygnały i sposób przypisania są opisane w tabeli dla Pr. 43.
45
DI4
a
0665
0000 H–0EEE H P S T
Wybór sygnału wejściowego 4 (Styk CN1A-8)
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr. 42 przypisano sygnał LOP do styku CN1A-8.
Do styku CN1A-8 można przypisać dowolny z sygnałów wejściowych, opisanych w tabeli powyżej. Należy zwrócić
uwagę, że wykorzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz.
Możliwe do przypisania sygnały i sposób przypisania są opisane w tabeli dla Pr. 43.
46
DI5
a
0770
0000 H–0EEE H P S T
Wybór sygnału wejściowego 5 (Styk CN1B-7)
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr. 42 przypisano sygnał LOP do styku CN1B-7.
Do styku CN1B-7 można przypisać dowolny z sygnałów wejściowych, opisanych w tabeli powyżej. Należy zwrócić
uwagę, że wykorzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz.
Możliwe do przypisania sygnały i sposób przypisania są opisane w tabeli dla Pr. 43.
Tab. 4-31: Szczegółowe omówienie parametrów (13)
0
Regulacja położenia
Regulacja momentu
Regulacja prędkości
Regulacja położenia
Regulacja momentu
Regulacja prędkości
Regulacja położenia
Regulacja momentu
Regulacja prędkości
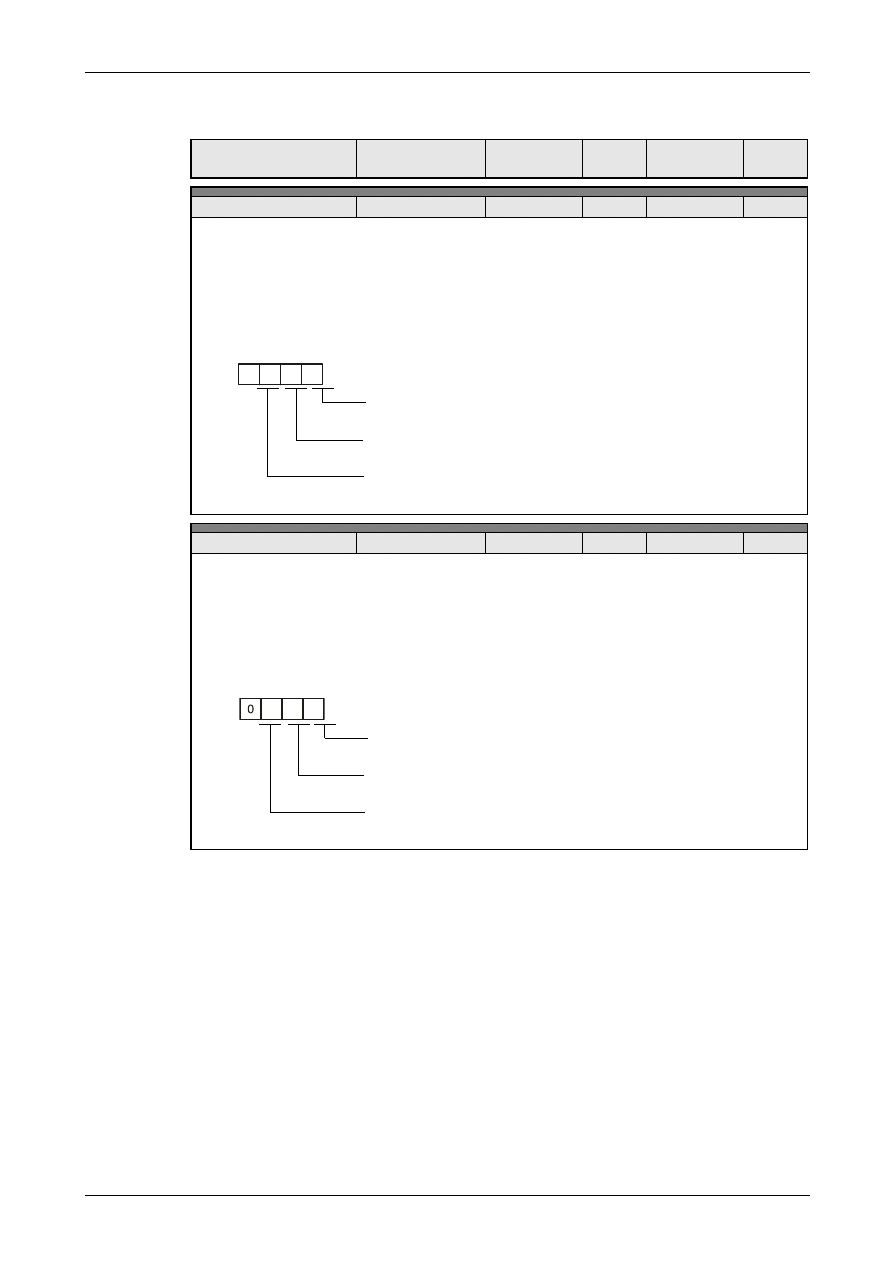
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 35
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
47
DI6
a
0883
0000 H–0EEE H P S T
Wybór sygnału wejściowego 6 (Styk CN1B-8)
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr. 42 przypisano sygnał LOP do styku CN1B-8.
Do styku CN1B-8 można przypisać dowolny z sygnałów wejściowych, opisanych w tabeli powyżej. Należy zwrócić
uwagę, że wykorzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz. Jeżeli
wybrany jest system pozycjonowania absolutnego (patrz Pr. 1), do styku CN1B-8 przypisany jest sygnał ABSM i nie
jest on programowalny.
Możliwe do przypisania sygnały i sposób przypisania są opisane w tabeli dla Pr. 43.
48
DI7
a
0994
0000 H–0EEE H P S T
Wybór sygnału wejściowego 7(Styk CN1B-9)
UWAGA:
Dany parametr nie jest dostępny, jeżeli w parametrze Pr. 42 przypisano sygnał LOP do styku CN1B-9.
Do styku CN1B-9 można przypisać dowolny z sygnałów wejściowych, opisanych w tabeli powyżej. Należy zwrócić
uwagę, że wykorzystywany sygnał jest uzależniony od trybu regulacji, w którym pracuje serwowzmacniacz. Jeżeli
wybrany jest system pozycjonowania absolutnego (patrz Pr. 1), do styku CN1B-9 przypisany jest sygnał ABSR i nie
jest on programowalny.
Możliwe do przypisania sygnały i sposób przypisania są opisane w tabeli dla Pr. 43.
Tab. 4-32: Szczegółowe omówienie parametrów(14)
0
Regulacja położenia
Regulacja momentu
Regulacja prędkości
Regulacja położenia
Regulacja momentu
Regulacja prędkości
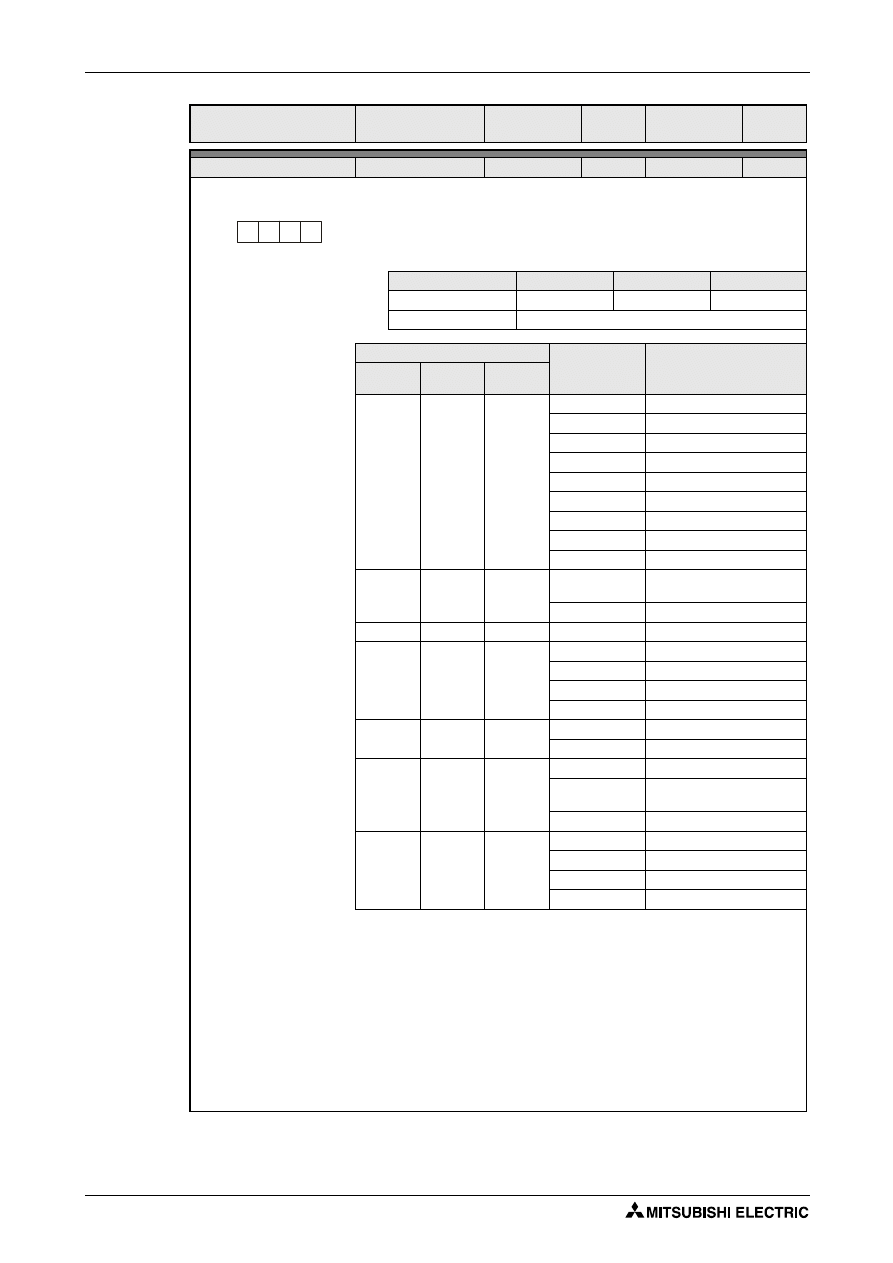
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 36
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
49
DO1
a
0000
0000 H–0551 H P S T
Wybór sygnału wyjściowego 1
Służy do wyboru styków, na które wydawany jest kod alarmu, ostrzeżenia (WNG) lub ostrzeżenia baterii (BWNG).
Wartość
CNB-19
CN1A-18
CN1A-19
0
ZSP
INP lub SA
RD
1
W stanie alarmu wydawany jest jego kod.
Kod alarmu
Komunikat
alarmu
Nazwa alarmu
CN1B
Styk 19
CN1A
Styk 18
CN1A
Styk 19
0
0
0
8888
Watchdog
AL.12
Błąd pamięci 1
AL.13
Błąd zegara
AL.15
Błąd pamięci 2
AL.17
Błąd płyty głównej 2
AL.19
Błąd płyty głównej 3
AL.37
Błąd parametru
AL.8A
Time-out komunikacji
AL.8E
Błąd komunikacji
0
0
1
AL.30
Przeciążenie układu
hamowania
AL.33
Przepięcie
0
1
0
AL.10
Zbyt niskie napięcie
0
1
1
AL.45
Przegrzanie obwodu mocy
AL.46
Przegrzanie serwosilnika
AL.50
Przeciążenie 1
AL.51
Przeciążenie 2
1
0
0
AL. 24
Zwarcie doziemne
AL. 32
Przeciążenie prądowe
1
0
1
AL.31
Zbyt wysoka prędkość
AL.35
Zbyt wysoka częstotliwość
wejściowa
AL.52
Nadmierny uchyb
1
1
0
AL.16
Błąd enkodera 1
AL.1A
Niewłaściwy serwosilnik
AL.20
Błąd enkodera 2
AL.25
Utrata pozycji absolutnej
Tab. 4-33: Szczegółowe omówienie parametrów (14)
0
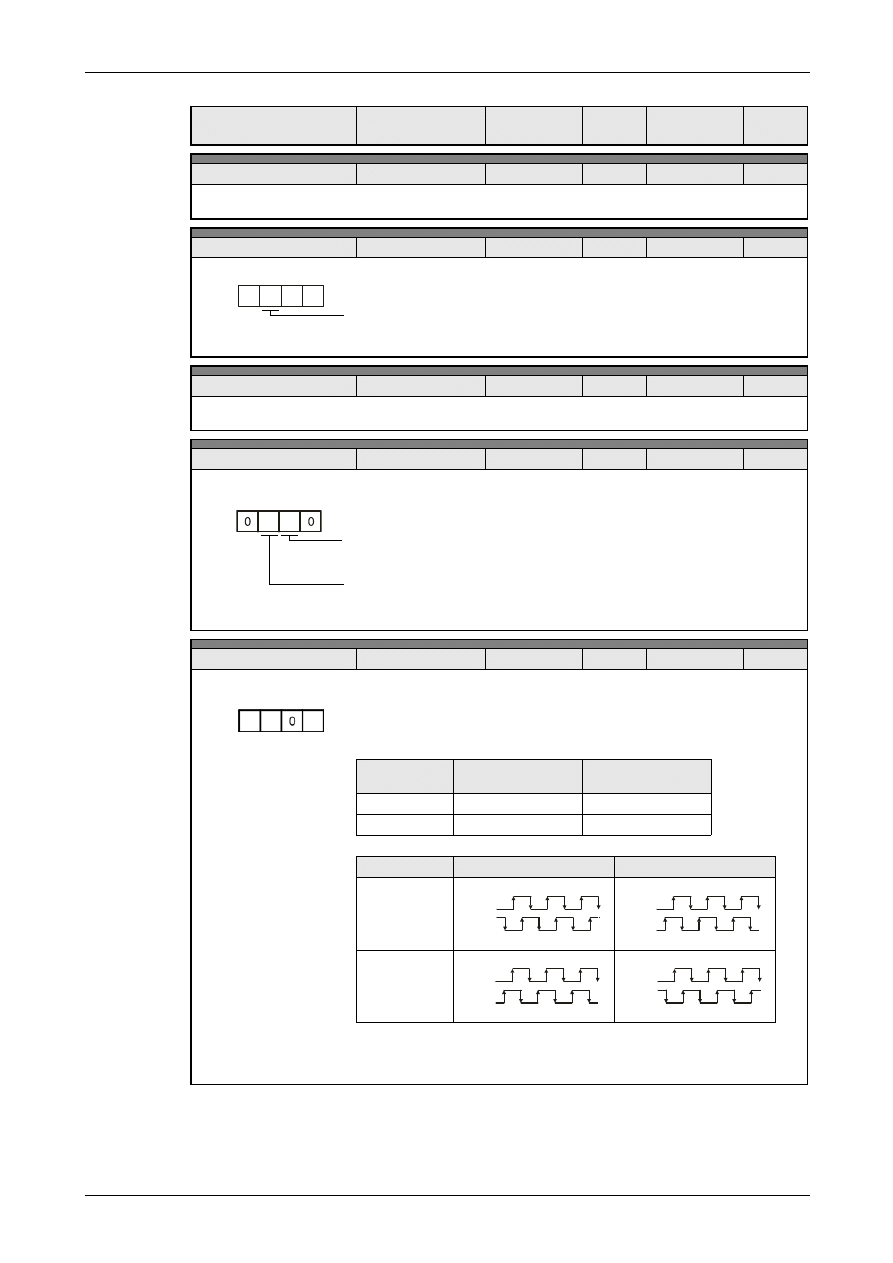
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 37
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
50
0000
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
51
OP6
a
0000
0000 H–0100 H P S T
Wybór funkcji 6
52
0000
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
53
OP8
a
0000
0000 H–0110 H P S T
Wybór funkcji 8
Protokół komunikacji szeregowej
54
OP9
a
0000
0000 H–1101 H P S T
Wybór funkcji 9
Kierunek obrotu serwosilnika i sposób emulacji impulsów enkodera
Wartość
Ciąg impulsów zada-
je obroty w prawo
Ciąg impulsów zada-
je obroty w lewo
0
Obroty w prawo
Obroty w lewo
1
Obroty w lewo
Obroty w prawo
Wartość
Obroty w prawo
Obroty w lewo
0
1
Tab. 4-34: Szczegółowe omówienie parametrów (15)
0
0 0
Operacja wykonywana przy podaniu sygnału RES
0: bez odcinania wyjścia obwodu mocy
1: odcięcie wyjścia obwodu mocy
Suma kontrolna
0: z sumą kontrolną
1: bez sumy kontrolnej
Numer stacji
0: z podawaniem numeru stacji
1: bez podawania numeru stacji
Faza A
Faza B
Faza A
Faza B
Faza A
Faza B
Faza A
Faza B
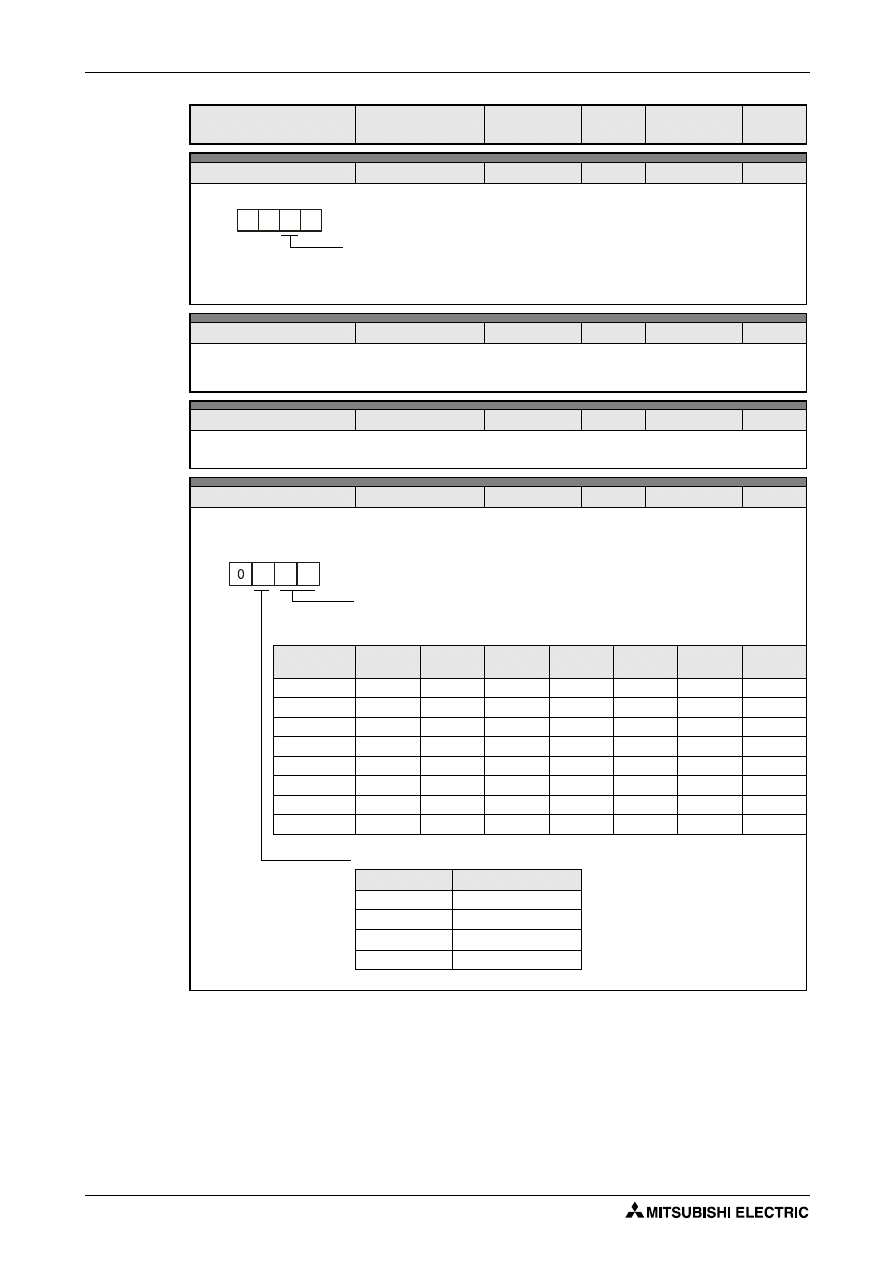
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 38
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
55
OPA
a
0000
0000 H–0010 H P
Wybór funkcji A
56
SIC
0
s
0–60
P S T
Time-out komunikacji szeregowej.
Parametr określa czas time-out dla protokołu komunikacji szeregowej.
Przy ustawieniu „0“ komunikacja nie jest kontrolowana.
57
10
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
58
NH1
0000
0000 H–031F H P S T
Pierwszy filtr antywibracyjny
Parametr określa charakterystyki pierwszego (z dwóch dostępnych, patrz Pr. 59) wąskopasmowego filtra środko-
wozaporowego, tłumiącego rezonans mechaniczny w maszynie.
Wartość
Często-
tliwość
War-
tość
Często-
tliwość
War-
tość
Często-
tliwość
War-
tość
Często-
tliwość
00
—
08
562,5
10
281,3
18
187,5
01
4500
09
500
11
264,7
19
180
02
2250
0A
450
12
250
1A
173,1
03
1500
0B
409,1
13
236,8
1B
166,7
04
1125
0C
375
14
225
1C
160,1
05
900
0D
346,2
15
214,3
1D
155,2
06
750
0E
321,4
16
204,5
1E
150
07
642,9
0F
300
17
195,7
1F
145,2
Wartość
Tłumienie
0
40 dB
1
14 dB
2
8 dB
3
4 dB
Tab. 4-35: Szczegółowe omówienie parametrów (16)
Wybór stałej czasowej rozpędzania/hamowania w trybie pozyc-
jonowania (patrz także Pr. 7)
0: Filtr wejściowy
1: Liniowe rozpędzanie/hamowanie z zadanym czasem
0
0
0
Wybór częstotliwości rezonansowej:
Należy wybrać "00", gdy w Pr. 60 zostanie wybrana opcja "aktywne" lub "podtrzy-
mane" dla funkcji automatycznego tłumienia wibracji (Pr. 60 = m1mm lub m2mm)
Wybór wartości tłumienia ("głębokości") filtra
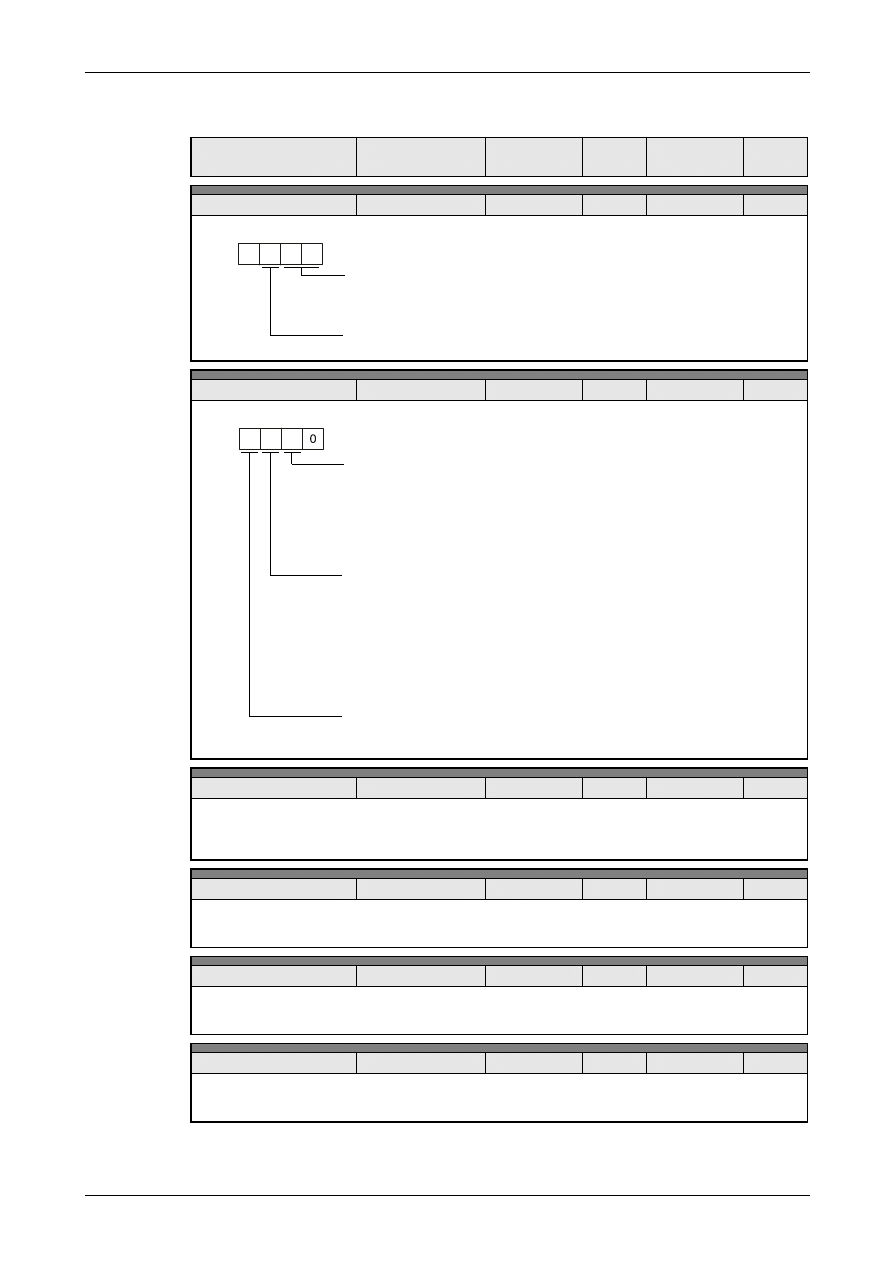
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 39
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
59
NH2
0000
0000 H–031F H P S T
Drugi filtr antywibracyjny (patrz Pr. 58)
60
LPF
0000
0000 H–1210 H P S T
Filtr dolnoprzepustowy, automatyczne tłumienie wibracji
61
GD2B
70
x 0,1
0–3000
P S
Druga wartość współczynnika momentu bezwładności obciążenia
Parametr określa alternatywną wartość stosunku momentu bezwładności obciążenia do momentu bezwładności
serwosilnika, używaną przez funkcję przełączania parametrów regulatorów.
Parametr jest aktywny, gdy nie jest używana funkcja autotuningu.
62
PG2B
100
%
10–200
P
Zmiana współczynnika wzmocnienia regulatora położenia 2
Parametr określa wielkość zmiany współczynnika wzmocnienia regulatora położenia, gdy używana jest funkcja
przełączania parametrów regulatorów. Parametr jest aktywny, gdy nie jest używana funkcja autotuningu.
63
VG2B
100
%
10–200
P S
Zmiana współczynnika wzmocnienia regulatora prędkości 2
Parametr określa wielkość zmiany współczynnika wzmocnienia regulatora prędkości, gdy używana jest funkcja
przełączania parametrów regulatorów. Parametr jest aktywny, gdy nie jest używana funkcja autotuningu.
64
VICB
100
%
50–1000
P S
Zmiana stałej czasowej członu I regulatora prędkości
Parametr określa wielkość zmiany stałej czasowej członu I regulatora prędkości, gdy używana jest funkcja
przełączania parametrów regulatorów. Parametr jest aktywny, gdy nie jest używana funkcja autotuningu.
Tab. 4-36: Szczegółowe omówienie parametrów (17)
0 0
0
Częstotliwość rezonansowa
Ustawienia jak dla parametru Pr. 58, z tym że nie ma konieczności wyboru war-
tości "00" przy wyborze w Pr. 60 opcji "aktywne" lub "podtrzymane" dla funkcji
automatycznego tłumienia wibracji.
Tłumienie
Patrz Parametr 58
Filtr dolnoprzepustowy
0: aktywny
1: nie aktywny
Wybór opcji "aktywny" definiuje filtr dolnoprzepustowy o częstotliwości granicznej:
fg Hz
[
]
VG2 10
×
2
π 1 GD2 0 1
,
×
+
(
)
------------------------------------------------
=
Czułość automatycznej detekcji wibracji
0: normalna czułość
1: podwyższona czułość
Automatyczne tłumienie wibracji
Jeżeli funkcja zostaje uaktywniona przez wybór opcji "aktywne“ lub „podtrzymane“,
funkcja ta zastępuje pierwszy filtr antywibracyjny (Pr. 58).
0: nie aktywne
1: aktywne (Częstotliwość rezonansowa maszyny jest wykrywana automatycznie i
definiowany jest odpowiedni filtr)
2: podtrzymane (Kontynuowane jest działanie filtra z wcześniej ustawionymi
charakterystykami, dalsza automatyczna detekcja nie jest wykonywana)
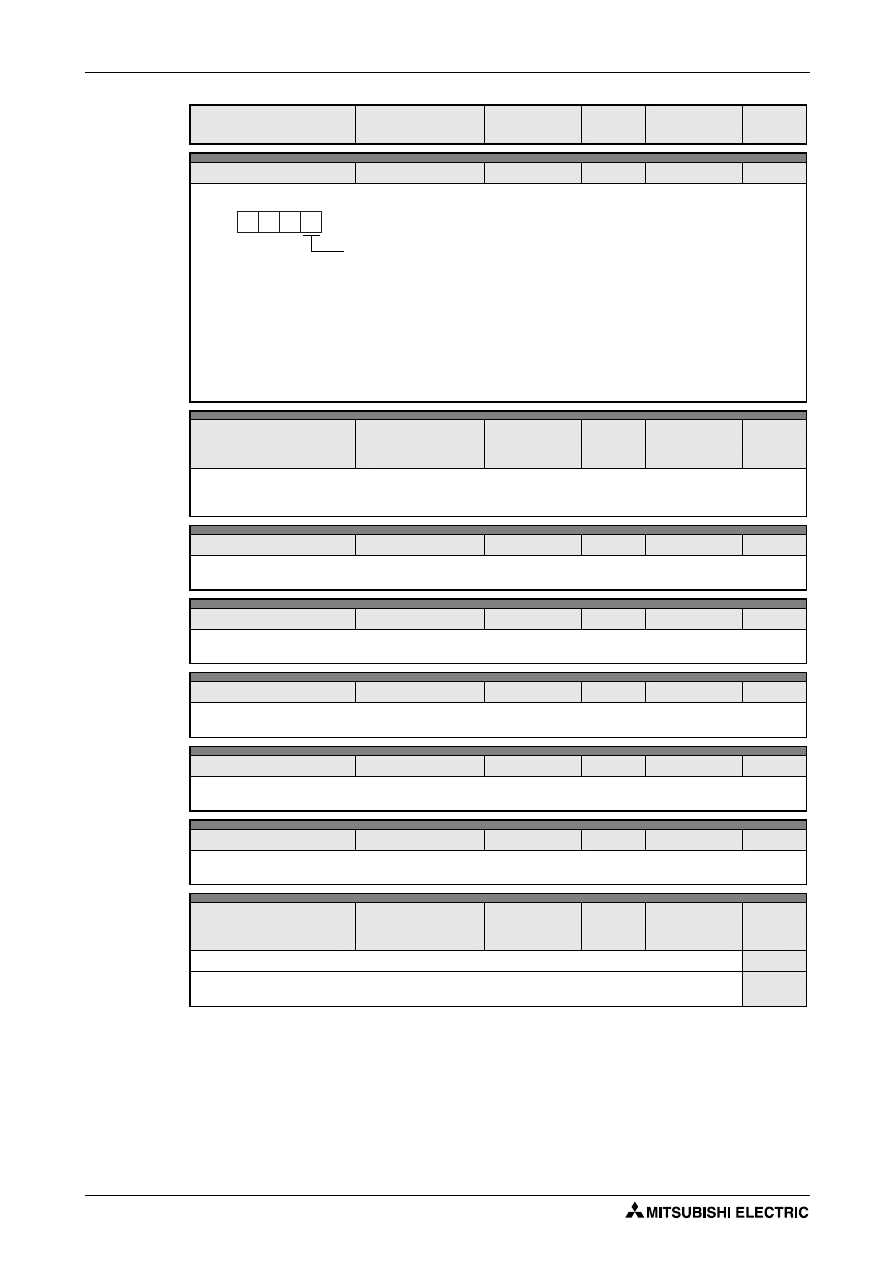
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 40
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
65
CDP
a
0000
0000 H–1210 H P S
Wybór kryterium przełączania parametrów regulatorów
66
CDS
10
10ł Imp./s
impuls,
obr/min
10–9999
P S
Próg przełączenia parametrów regulatorów
Parametr określa wartość progową (częstotliwości ciągu impulsów, uchybu położenia, prędkości serwosilnika), przy
przekroczeniu której następuje przełączenie parametrów regulatorów
67
CDT
1
ms
0–100
P S
Stała czasowa, z którą zmieniają się wartości parametrów przy ich przełączeniu zgodnie z ustawieniami
parametrów Pr. 65 i 66 (patrz Rozdział 5.2)
68
0
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
69
CMX2
1
0–65535
P
Druga wartość licznika przekładni elektronicznej
Ustawienie CMX2 = 0 powoduje przyjęcie wartości równej rozdzielczości enkodera podłączonego serwosilnika.
70
CMX3
1
0–65535
P
Trzecia wartość licznika przekładni elektronicznej
Ustawienie CMX3 = 0 powoduje przyjęcie wartości równej rozdzielczości enkodera podłączonego serwosilnika.
71
CMX4
1
0–65535
P
Czwarta wartość licznika przekładni elektronicznej
Ustawienie CMX4 = 0 powoduje przyjęcie wartości równej rozdzielczości enkodera podłączonego serwosilnika.
72
SC4
200
obr/min
0–prędkość
maksymalna
serwosilnika
Prędkość zaprogramowana 4
S
Ograniczenie prędkości 4
Czwarta wartość najwyższej prędkości w trybie regulacji momentu
T
Tab. 4-37: Szczegółowe omówienie parametrów (18)
0 0
0
Kryterium przełączania:
Parametry regulatorów są przełączane zgodnie z wartościami Pr. 61 do 64, gdy
zostanie spełniony wybrany warunek (1-4):
0: funkcja nie jest aktywna
1: Załączony jest sygnał przełączania (CDP).
2: Częstotliwość impulsów jest równa lub większa od wartości parametru Pr. 66.
3: Uchyb (w impulsach) jest równy lub większy od wartości parametru Pr. 66.
4: Prędkość serwosilnika jest równa lub większa od wartości parametru Pr. 66.
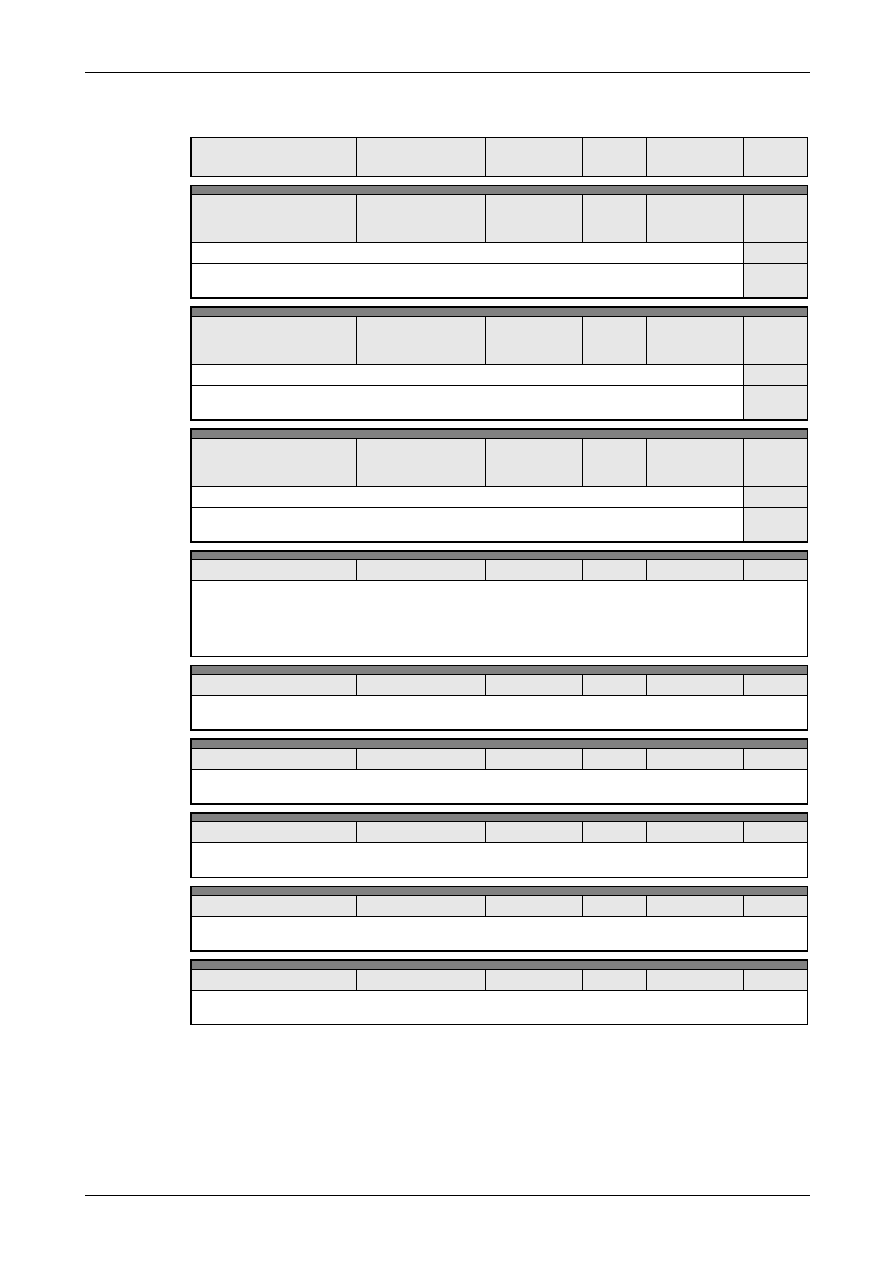
Elementy operacyjne serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 41
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
73
SC5
300
obr/min
0–prędkość
maksymalna
serwosilnika
Prędkość zaprogramowana 5
S
Ograniczenie prędkości 5
Piąta wartość najwyższej prędkości w trybie regulacji momentu
T
74
SC6
500
obr/min
0–prędkość
maksymalna
serwosilnika
Prędkość zaprogramowana 6
S
Ograniczenie prędkości 6
Szósta wartość najwyższej prędkości w trybie regulacji momentu
T
75
SC7
800
obr/min
0–prędkość
maksymalna
serwosilnika
Prędkość zaprogramowana 7
S
Ograniczenie prędkości 7
Siódma wartość najwyższej prędkości w trybie regulacji momentu
T
76
TL2
100
%
0–100
P S T
Wewnętrzne ograniczenie momentu 2.
Parametr określa wartość ograniczenia momentu silnika w % od maksymalnej wartości momentu obrotowego ser-
wosilnika. Ustawienie 0 uniemożliwia generowanie momentu obrotowego.
W przypadku użycia analogowego monitorowania momentu, ustawionej wartości będzie odpowiadać napięcie
wyjściowe +8 V. Parametr jest aktywny pod warunkiem podania sygnału TL1.
77
00
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
78
10000
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
79
10
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
80
10
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
81
100
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
Tab. 4-38: Szczegółowe omówienie parametrów (19)
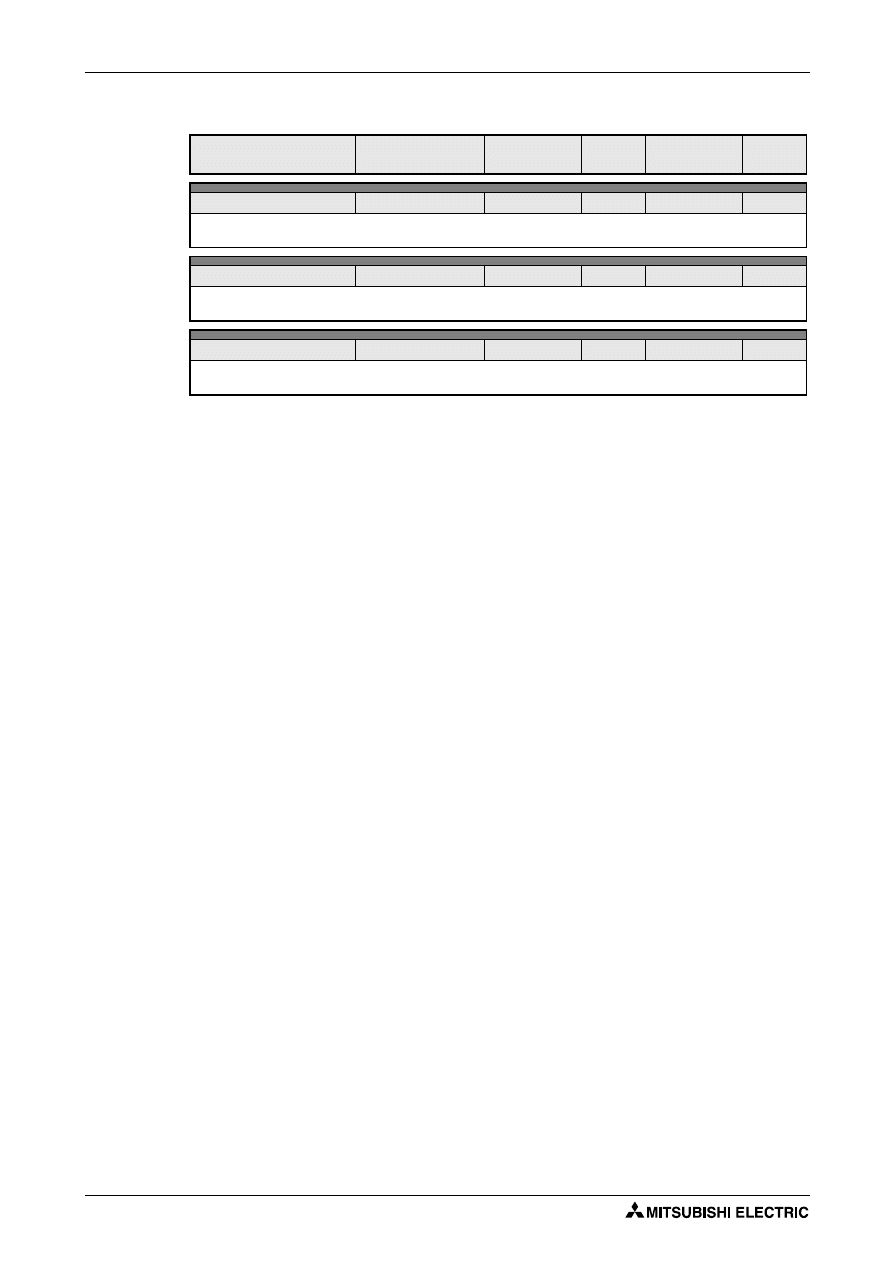
Użytkowanie serwonapędu
Elementy operacyjne serwowzmacniacza
4 - 42
a
Aby nowe ustawienie danego parametru stało się aktywne, po jego zmianie konieczne jest
wyłączenie i ponowne załączenie zasilania.
Numer parametru
Symbol
Ustawienie
fabryczne
Jednost-
ka
Zakres
ustawień
Tryb
regulacji
82
100
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
83
100
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
84
0
Zarezerwowany
Parametr do użytku producenta - zmiana wartości zabroniona!
Tab. 4-39: Szczegółowe omówienie parametrów (20)
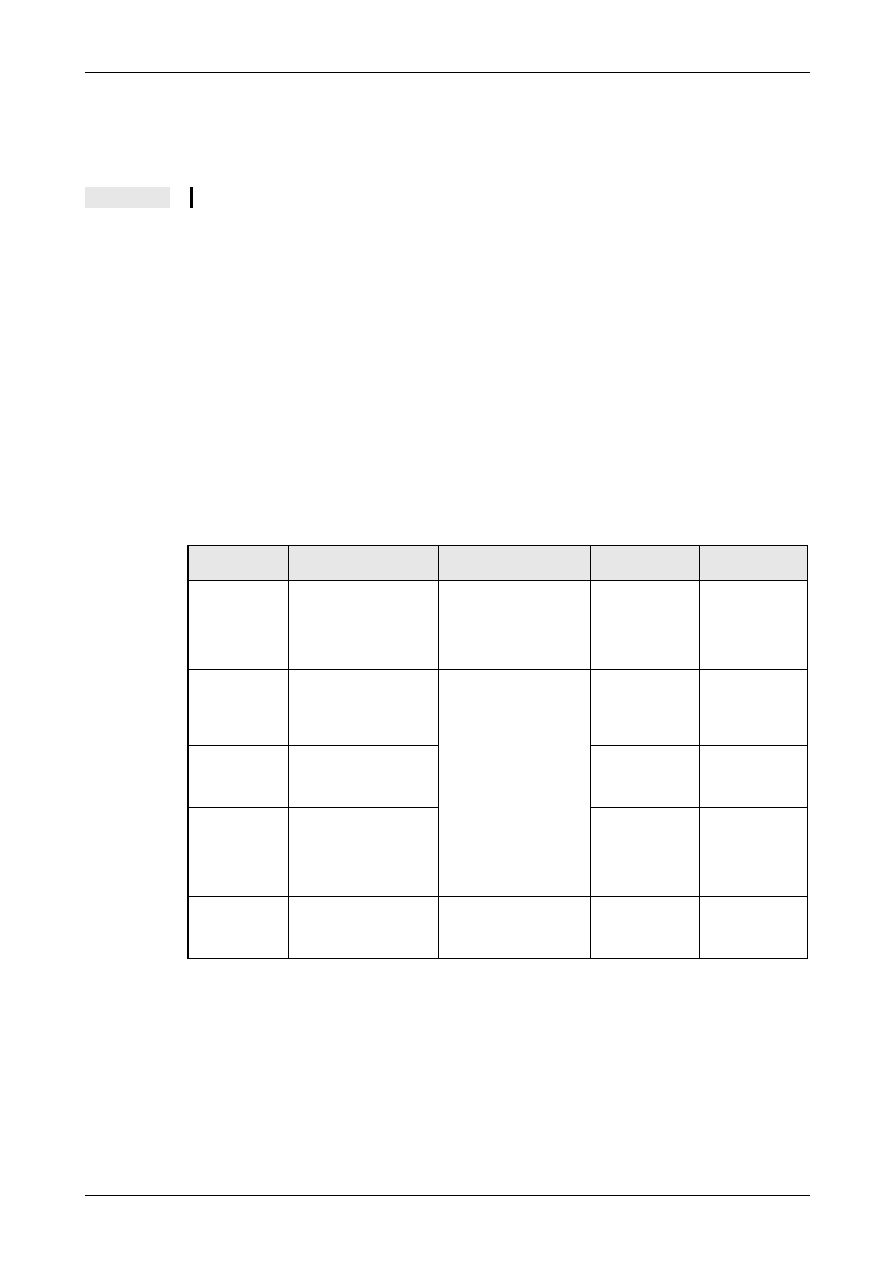
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 43
4.4
Optymalizacja parametrów serwowzmacniacza
4.4.1 Dostrajanie
współczynników wzmocnienia
Zasady doboru i optymalizacji współczynników wzmocnienia, opisane w rozdziałach 4.4.1 do
4.4.4 dotyczą pojedynczego serwowzmacniacza. W jednoosiowym serwonapędzie należy w
pierwszej kolejności wykonywać autotuning 1. Jeżeli uzyskane wyniki nie są zadowalające,
należy wykonywać, w podanej kolejności:
●
Autotuning 2
●
Tryb ręczny 1
●
Tryb ręczny 2
W poniższej tabeli zamieszczono porównanie poszczególnych metod dostrajania parametrów
regulatorów serwowzmacniacza:
UWAGA
W trybie regulacji momentu dostrajanie współczynników wzmocnienia nie jest konieczne.
Metoda
Wartość Pr. 2
Współczynnik momentu
bezwładności obciążenia
Automatycznie
ustawiane są Pr.
Ręcznie usta-
wiane są Pr.
Autotuning 1
010m
Oceniany stale
PG1 (Pr. 6),
GD2 (Pr. 34),
PG2 (Pr.35),
VG1 (Pr. 36),
VG2 (Pr. 37),
VIC (Pr. 38)
Odpowiedź sys-
temu (Pr. 2)
Autotuning 2
020m
Ustalony zgodnie z war-
tością Pr. 34
PG1 (Pr. 6),
PG2 (Pr.35),
VG1 (Pr. 36),
VG2 (Pr. 37),
VIC (Pr. 38)
GD2 (Pr. 34),
odpowiedź sys-
temu (Pr. 2)
Ustawianie
ręczne 1
030m
PG2 (Pr.35),
VG1 (Pr. 36)
PG1 (Pr. 6),
GD2 (Pr. 34),
VG2 (Pr. 37),
VIC (Pr. 38)
Ustawianie
ręczne 2
040m
—
PG1 (Pr. 6),
GD2 (Pr. 34),
PG2 (Pr.35),
VG1 (Pr. 36),
VG2 (Pr. 37),
VIC (Pr. 38)
Tryb interpolacji
000m
Oceniany stale
GD2 (Pr. 34),
PG2 (Pr.35),
VG2 (Pr. 37),
VIC (Pr. 38)
PG1 (Pr. 6),
VG1 (Pr. 36)
Tab. 4-40: Metody dostrajania wartości parametrów
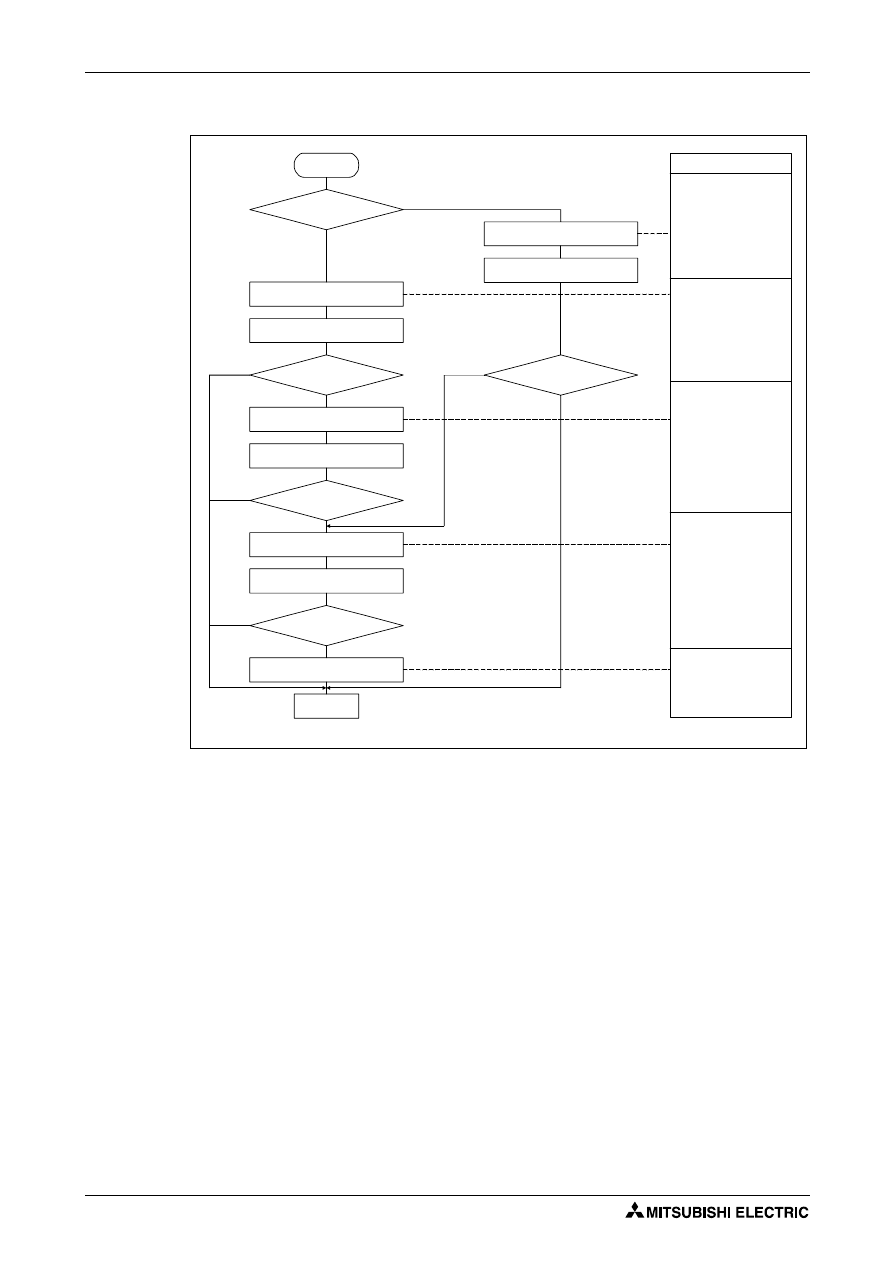
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 44
Dostrajanie wartości parametrów należy wykonywać wg poniższego algorytmu:
S000867C
Rys. 4-49: Algorytm dostrojenia parametrów regulatorów serwowzmacniacza
Służy wyłącznie do
wyrównania współczynników
wzmocnienia regulatora
położenia (PG1) dla 2 lub
więcej współpracujących osi
Umożliwia dostrojenie
wszystkich parametrów
regulatorów przez ręczne
podanie jedynie poziomu
odpowiedzi systemu. Metoda
powinna być wykorzysty-
wana jako pierwsza.
Używany, gdy warunki
wymagane dla
przeprowadzenia
autotuningu 1 nie są
spełnione, wskutek czego np.
współczynnik momentu
bezwładności obciążenia jest
oceniany nieprawidłowo.
Jeżeli wyniki autotuningu są
niezadowalające, metoda ta
umożliwia ręczne ustawienie
trzech parametrów i
automatyczne dostrojenie
pozostałych.
Wszystkie współczynniki
wzmocnienia mogą być
ustawione ręcznie, np. w celu
minimalizacji czasu dojścia
itp.
KONIEC
Zastosowanie
Interpolacja
dla 2 lub więcej osi?
Autotuning 1
Praca
OK?
Autotuning 2
Praca
Ustawianie ręczne 1
Ustawianie ręczne 2
Praca
O.K?
OK?
START
TAK
TAK
TAK
TAK
NIE
NIE
NIE
NIE
NIE
TAK
Interpolacja
Praca
OK?
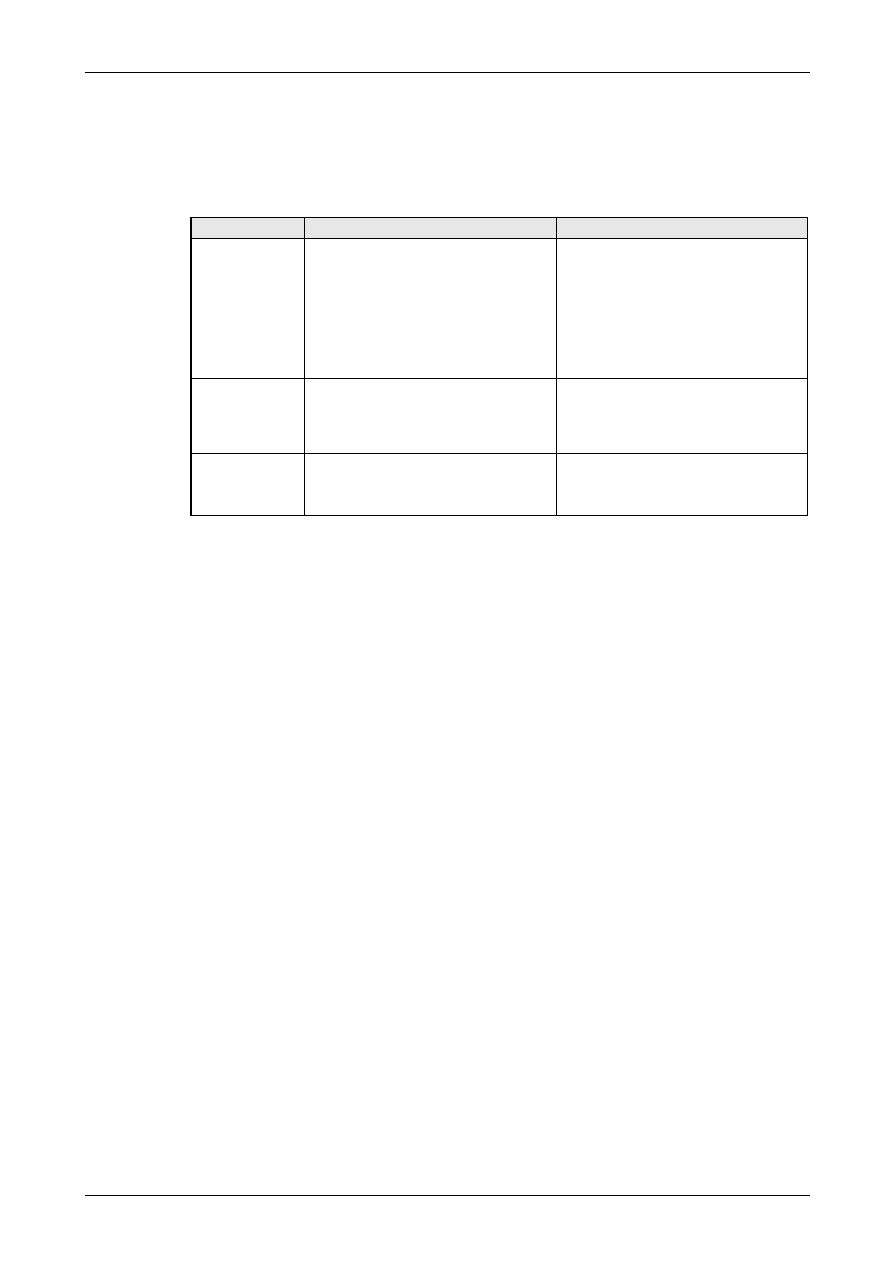
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 45
4.4.2 Dostrajanie
wartości współczynników wzmocnienia z pomocą opro-
gramowania narzędziowego
W poniższej tabeli przedstawiono funkcje oprogramowania narzędziowego i realizowane przez
nie metody dostrajania parametrów serwonapędu:
Funkcja
Opis
Zastosowanie
Analizator maszyny Przy serwonapędzie połączonym z maszyną
możliwy jest pomiar charakterystyk rezonan-
sowych systemu poprzez wzbudzanie wibracji
poleceniami z PC i analizę reakcji maszyny.
Wykrywane są częstotliwości rezonansu
własnego maszyny i automatycznie dobie-
rane parametry wąskopasmowego filtra anty-
wibracyjnego.
Możliwa jest optymalizacja współczynników
wzmocnienia zgodnie z charakterystykami
maszyny. Jest to uproszczona metoda dostra-
jania, odpowiednia dla maszyn z wyraźnymi
zjawiskami rezonansowymi i nie wyma-
gających optymalizacji czasów dojścia.
Poszukiwanie
wzmocnienia
Drogą poszukiwania optymalnych wartości
współczynników wzmocnień przy wielokrotnie
powtarzanej operacji pozycjonowania system
odnajduje wartości, dla których czas dojścia
jest najkrótszy.
Dobór współczynników wzmocnienia
zapewniających najkrótszy czas dojścia.
Symulator
maszyny
Program przeprowadza na komputerze PC
symulację reakcji maszyny w trybie pozyc-
jonowania, w oparciu o dane wprowadzone
ręcznie lub uzyskane z analizatora maszyny
Optymalizacja współczynników wzmocnienia
oraz przebiegu sygnałów zadających przy
pomocy PC, bez użycia rzeczywistej
maszyny.
Tab. 4-41: Dostrajanie przy użyciu oprogramowania narzędziowego na PC.
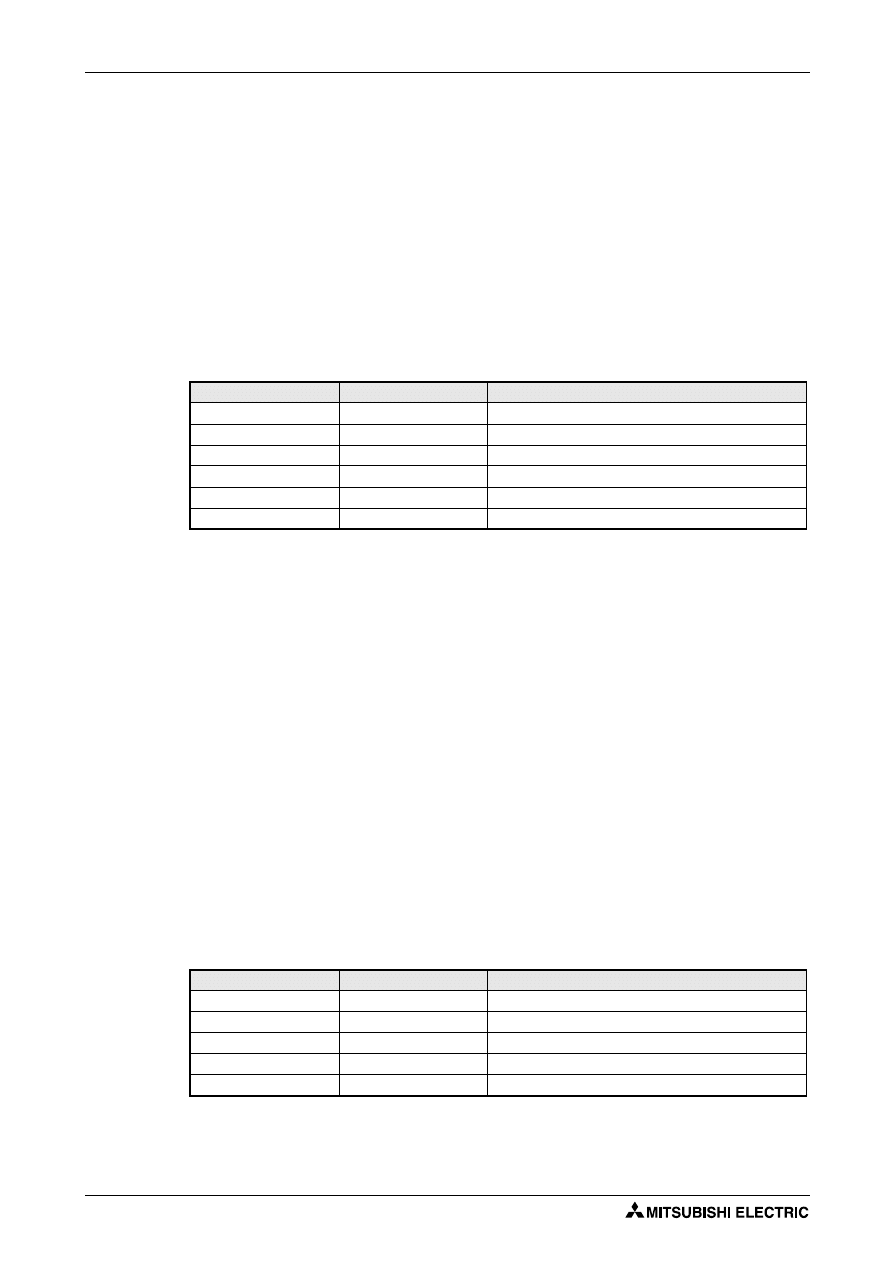
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 46
4.4.3 Autotuning
Serwowzmacniacz MR-J2S posiada funkcję autotuningu w czasie rzeczywistym, wykonującą
ciągłe optymalizowanie parametrów (tj. współczynników wzmocnienia i stałych czasowych)
regulatora położenia i regulatora prędkości serwowzmacniacza, w oparciu o ocenę wartości
stosunku momentu bezwładności obciążenia do momentu bezwładności serwosilnika. Funkcja
ta zastępuje pracochłonny dobór tych parametrów podczas rozruchu oraz dopasowuje je do
zmiennych w czasie warunków pracy serwonapędu.
Autotuning 1
W konfiguracji fabrycznej serwowzmacniacz jest zaprogramowany do wykonywania funkcji au-
totuning 1. W czasie normalnej pracy serwonapędu w sposób ciągły oceniana jest wartość
współczynnika mamentu bezwładności obciążenia i odpowiednio do niej optymalizowane są
współczynniki wzmocnienia. Autotuning 1 dostraja automatycznie następujące parametry:
Dla pomyślnego przebiegu autotuningu 1 wymagane jest spełnienie następujących warunków:
●
Czas rozpędzania/hamowania do/od prędkości 2000 obr/min nie przekracza 5s.
●
Prędkość robocza jest nie mniejsza, niż 150 obr/min.
●
Stosunek momentu bezwładności obciążenia do momentu bezwładności serwosilnika nie
przekracza 100.
●
Moment obrotowy rozpędzania/hamowania jest nie mniejszy, niż 10 % momentu znamio-
nowego serwosilnika.
●
Nie występują nagłe zmiany momentu obciążenia podczas rozpędzania/hamowania, ani
ekstremalnie duże luzy w maszynie.
Jeżeli którykolwiek z powyższych warunków nie jest spełniony, autotuning 1 może
dawać nieprawidłowe wyniki. W takim przypadku należy w miarę konieczności użyć au-
totuningu 2, a następnie kolejno przejść do trybu ręcznego 1 i trybu ręcznego 2.
Autotuning 2
Jeżeli wykonywanie autotuningu 1 jest niemożliwe lub nie daje on prawidłowych wyników,
należy przejść do autotuningu 2. Ponieważ w tym trybie nie jest oceniana wartość współczyn-
nika momentu bezwładności obciążenia, należy jej poprawną wartość wpisać ręcznie w Pr. 34.
Autotuning 2 dostraja automatycznie następujące parametry:
Parametr
Symbol
Nazwa
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
34
GD2
Współczynnik momentu bezwładności obciążenia
35
PG2
Współczynnik wzmocnienia regulatora położenia 2
36
VG1
Współczynnik wzmocnienia regulatora prędkości 1
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
38
VIC
Stała czasowa członu I regulatora prędkości
Tab. 4-42: Parametry dostrajane automatycznie przez autotuning 1
Parametr
Symbol
Nazwa
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
35
PG2
Współczynnik wzmocnienia regulatora położenia 2
36
VG1
Współczynnik wzmocnienia regulatora prędkości 1
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
38
VIC
Stała czasowa członu I regulatora prędkości
Tab. 4-43: Parametry dostrajane automatycznie przez autotuning 2
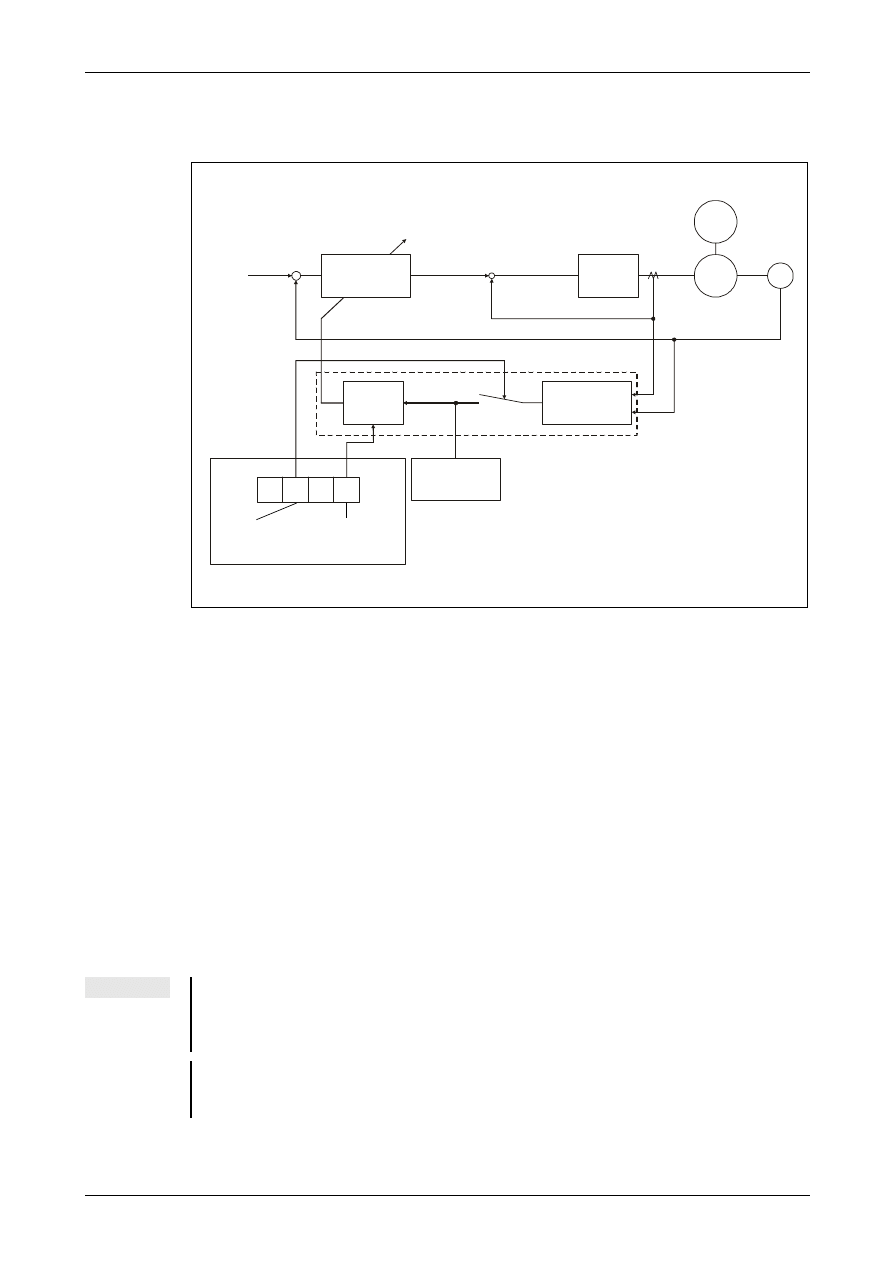
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 47
Sposób wykonywania autotuningu
Na poniższym rysunku przedstawiono schemat blokowy funkcji autotuningu:
Podczas każdego rozpędzania/hamowania na podstawie pomiaru prądu i prędkości serwosilni-
ka oceniana jest wartość współczynnika momentu bezwładności obciążenia. Wartość ta jest
wpisywana do Pr. 34 i jest na bieżąco widoczna w oknie stanu serwonapędu oprogramowania
narzędziowego na PC.
Jeżeli wartość współczynnika momentu bezwładności obciążenia jest z góry znana lub wiado-
mo, że jego prawidłowa ocena jest niemożliwa, należy przejść do autotuningu 2 (Pr. 2 =
„m2mm“) aby nie wykonywać oceny i ręcznie wpisać wartość Pr. 34.
Na podstawie wpisanej wartości współczynnika momentu bezwładności (Pr. 34) oraz szybkości
reakcji systemu (pierwszy znak Pr. 2) z użyciem wewnętrznej tabeli współczynników wzmoc-
nienia wyliczane są optymalne wartości.
Wyniki autotuningu są co każde 60 minut od chwili załączenia zasilania zapisywane w pamięci
EEPROM serwowzmacniacza. Po kolejnym załączeniu jako wielkości początkowe są pobie-
rane wartości ostatnio zapisane w EEPROM.
S000868C
Rys. 4-50: Schemat blokowy funkcji autotuningu
UWAGA
W przypadku wystąpienia podczas pracy nagłych zmian momentu obciążenia, ocena
współczynnika momentu bezwładności obciążenia może przez pewien czas być niepra-
widłowa. W takim przypadku należy przejść do autoutotuningu 2 (Pr. 2 = 020m) i wpisać
wartość Pr. 34 ręcznie.
Przy przełączeniu z: autotuningu 1, autotuningu 2 lub trybu ręcznego 1 do trybu ręcznego 2
aktualne wartości współczynników wzmocnienia oraz współczynnika momentu
bezwładności obciążenia zapisywane są automatycznie w pamięci EEPROM.
0
0
1
7
SW1
+
-
+
-
Automatyczne
dostrajanie
Regulacja
prądu
Moment bezwład-
ności obciążenia
Enkoder
Pomiar poło-
żenia i prędkości
Tylko dla autotuningu 1 i
trybu interpolacji
Zwarte przy wartości 0 i 1
Wartości
PG1, VG1, PG2,
VG2, VIC
Pr. 2
Pr. 34:
Współczynnik
momentu bezwł.
1. znak:
Reakcja syste-
mu
3. znak:
Autotuning
Ocena wartości
momentu
bezwładności ob-
ciążenia
Serwo-
silnik
Pomiar prędkości
Zadawanie
Tabela
współczyn
ników
Pomiar prądu
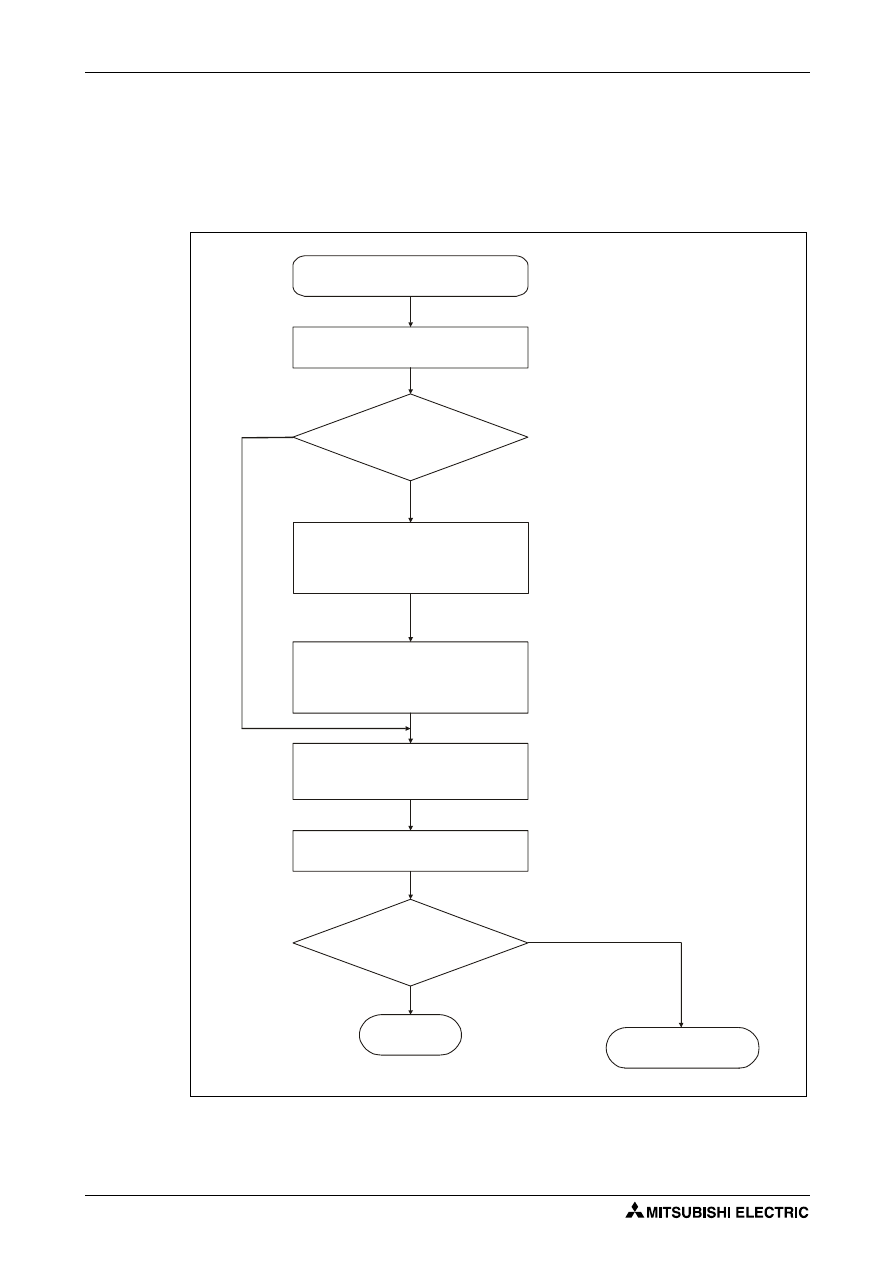
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 48
Procedura autotuningu
Serwowzmacniacz jest fabrycznie zaprogramowany do wykonywania autotuningu. Po
podłączeniu i uruchomieniu serwonapędu wszystkie współczynniki są optymalizowane dla
rzeczywistego obciążenia i zapisywane automatycznie. Jedynym wymaganym ustawieniem
jest określenie (np. doświadczalne) prawidłowej wartości szybkości reakcji systemu. Procedura
przebiega w następujący sposób:
S000869C
Rys. 4-51: Procedura autotuningu
Autotuning
Wielokrotne rozpędzanie/
hamowanie
Ocena momentu
bezwładności jest
stabilna?
Dobrać taki poziom szybkości reakcji syste-
mu, by uzyskać zadowalającą dynamikę
systemu bez wibracji
Wielokrotne rozpędzanie/ hamowanie
Praca OK?
Ustawianie ręczne
KONIEC
TAK
TAK
NIE
NIE
Ustawić Pr. 2 = „020m“ i ręcznie wpisać
wartość Pr. 34
Wielokrotne rozpędzanie/ hamowanie
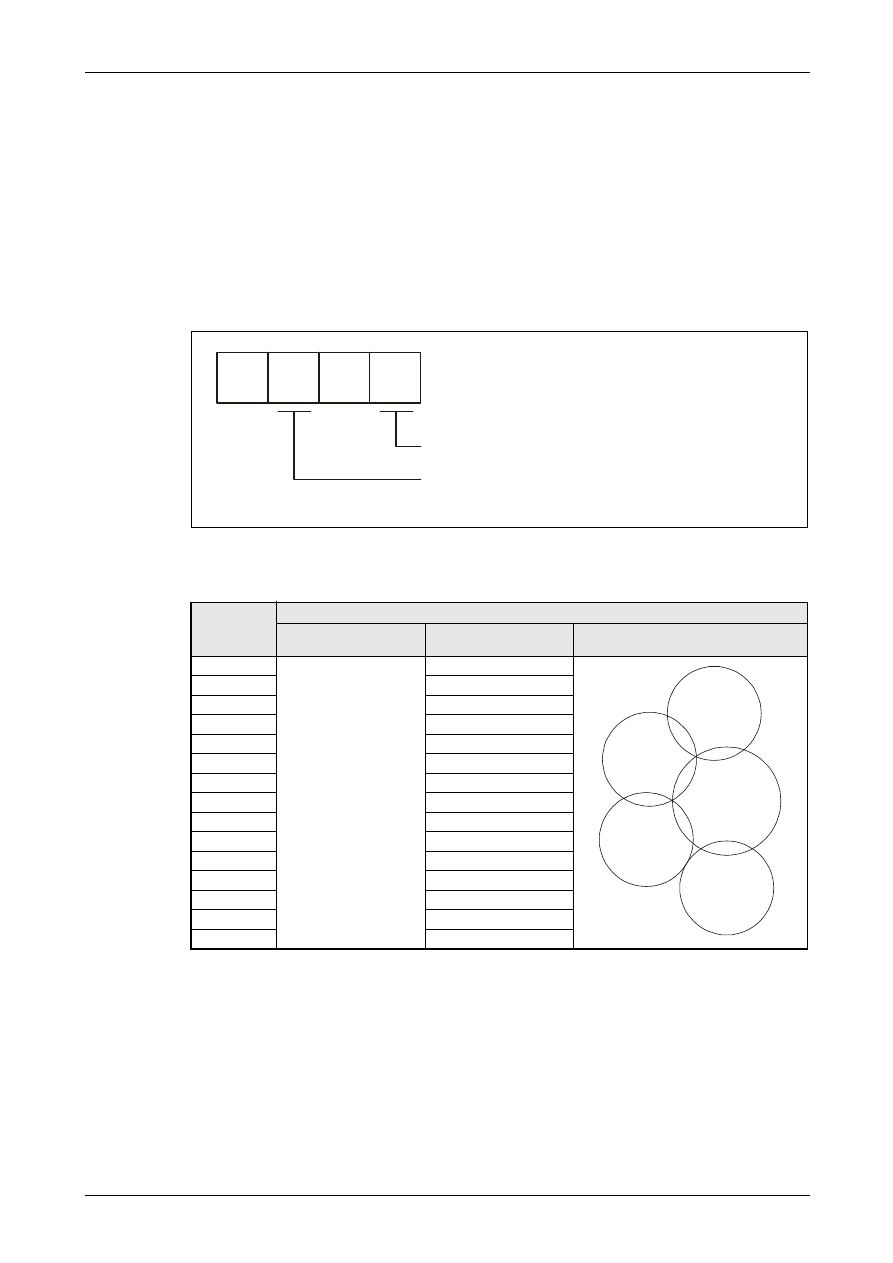
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 49
Dobór poziomu odpowiedzi systemu dla autotuningu
Pierwsza cyfra parametru Pr. 2 opisuje poziom reakcji układu napędowego jako całości. Pod-
wyższanie poziomu powoduje poprawę odwzorowania przebiegu sygnałów zadawania i skra-
canie czasu pozycjonowania, lecz zbyt wysoka wartość jest powodem generowania wibracji.
Należy więc dobrać jako optymalną taką wartość, przy której uzyskuje się zadowalające param-
etry ruchu bez wibracji.
Jeżeli poziom odpowiedzi systemu nie może być wystarczająco podniesiony wskutek
występowania rezonansu własnego maszyny w zakresie częstotliwości poniżej 100Hz, zaleca
się zastosowanie adaptacyjnego sterowania z automatycznym tłumieniem wibracji (Pr. 60) lub
filtrów antywibracyjnych (Pr. 58 i Pr. 59) tłumiących mechaniczne zjawiska rezonansowe. Zas-
tosowanie filtrów może pozwolić na dalsze podniesienie poziomu szybkości reakcji.
S000870C
Rys. 4-52: Ustawianie parametru 2
Wartość
Charakterystyka maszyny
Reakcja systemu
Częstotliwość rezo-
nansu własnego
Aplikacje
1
powolna
średnia
szybka
15 Hz
2
20 Hz
3
25 Hz
4
30 Hz
5
35 Hz
6
45 Hz
7
55 Hz
8
70 Hz
9
85 Hz
A
105 Hz
B
130 Hz
C
160 Hz
D
200 Hz
E
240 Hz
F
300 Hz
Tab. 4-44: Ustawianie szybkości reakcji systemu
0
0
1
7
Reakcja systemu
Wybór autotuningu
Wstawianie, mon-
taż, lutowanie itp.
Maszyny pre-
cyzyjne
Przenośniki,
taśmociągi
Duże taś-
mociągi
Ramię robota
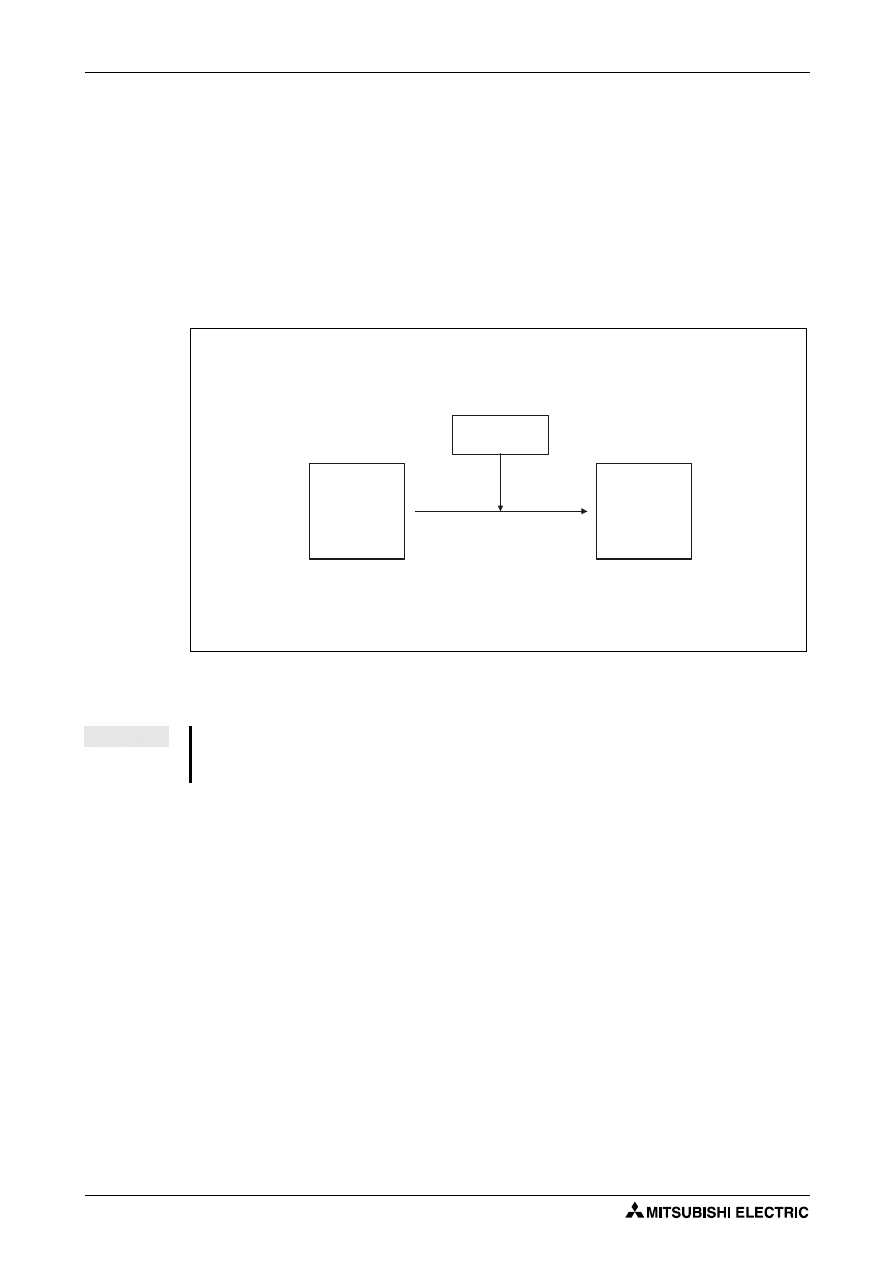
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 50
4.4.4 Ręczne ustawianie współczynników wzmocnienia
Jeżeli wyniki autotuningu nie są zadowalające, dostępna jest uproszczona procedura ustawień
ręcznych, gdzie ręcznie należy dobrać wartość trzech parametrów.
Ustawianie ręczne - tryb 1
W trybie ręcznym 1 po ręcznym ustaleniu wartości trzech parametrów: PG1 (współczynnik
wzmocnienia regulatora położenia 1), VG2 (współczynnik wzmocnienia regulatora prędkości 2)
i VIC (stała czasowa członu I regulatora prędkości) pozostałe współczynniki wzmocnienia op-
tymalizowane są automatycznie. Niezbędne jest też prawidłowe określenie przez użytkownika
wartości współczynnika momentu bezwładności obciążenia. (Pr. 34).
S000872C
Rys. 4-53: Tryb ręczny 1
UWAGA
Jeżeli występują objawy rezonansu własnego maszyny zaleca się zastosowanie adaptacyj-
nego sterowania z automatycznym tłumieniem wibracji (Pr. 60) lub filtrów antywibracyjnych
(Pr. 58 i Pr. 59), tłumiących zjawiska rezonansowe.
GD2
PG2
VG1
PG1
VG2
VIC
Ustawiane przez
użytkownika
Ustawiane au-
tomatycznie
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 51
●
Regulacja prędkości
W poniższej tabeli zebrano parametry, których wartości muszą być ustawione ręcznie przy pra-
cy serwowzmacniacza w trybie regulacji prędkości:
Ustawianie należy wykonywać wg poniższej procedury:
a Wpisać w Pr. 34 znaną lub oszacowaną wartości stosunku momentu bezwładności ob-
ciążenia do momentu bezwładności serwosilnika.
b Wpisać w Pr. 37 wartość na tyle niską, by serwonapęd pracował bez wibracji i nienormal-
nego hałasu. Podwyższać tę wartość stopniowo aż do pojawienia się wibracji i/lub hałasu.
Jako optymalną przyjąć najwyższą wartość, dla której serwonapęd pracuje bez wibracji.
c Wpisać w Pr. 38 wartość, na tyle wysoką, by serwonapęd pracował bez wibracji i nienor-
malnego hałasu. Obniżać tę wartość stopniowo aż do pojawienia się wibracji i/lub hałasu.
Jako optymalną przyjąć najniższą wartość, dla której serwonapęd pracuje bez wibracji.
d Jeżeli dalsze zmiany wg punktów b, c nie są możliwe z powodu zjawisk rezonansowych w
maszynie, a żądana dynamika serwonapędu nie została osiągnięta, należy powtórzyć
punkty b i c po zastosowaniu adaptacyjnego sterowania z automatycznym tłumieniem
wibracji (Pr. 60) lub filtrów antywibracyjnych (Pr. 58 i Pr. 59), tłumiących zjawiska rezonan-
sowe.
Dynamika regulatora prędkości jest determinowana przez współczynnik wzmocnienia VG2
(Pr. 37). Wyższa wartość poprawia dynamikę odpowiedzi regulatora, lecz może być przyczyną
generowania wibracji. Częstotliwość graniczna pętli regulacji opisana jest wyrażeniem:
Aby wyeliminować statyczny uchyb prędkości, regulator zawiera człon całkujący (regulacja PI).
Podwyższanie stałej czasowej członu I obniża odpowiedź systemu, lecz przy dużej wartości
współczynnika momentu bezwładności obciążenia lub obecności elementów wibrujących przy
zbyt małej wartości istnieje niebezpieczeństwo rezonansu. Jako orientacyjną należy przyjąć
wartość VIC (Pr. 38) opisaną poniższym wyrażeniem:
Parametr
Symbol
Nazwa
34
GD2
Współczynnik momentu bezwładności obciążenia
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
38
VIC
Stała czasowa członu I regulatora prędkości
Tab. 4-45: Parametry ustawiane ręcznie dla trybu regulacji prędkości
f gr [Hz]
VG2
(
)
1 GD2
+
[
] 2π
×
--------------------------------------
=
VIC [ms]
2000 ... 3000
VG2 1 GD2 0,1
×
+
(
)
⁄
--------------------------------------------------------
≥
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 52
●
Regulacja położenia
W poniższej tabeli zebrano parametry, których wartości muszą być ustawione ręcznie przy pra-
cy serwowzmacniacza w trybie regulacji położenia:
Ustawianie należy wykonywać wg poniższej procedury:
a Wpisać w Pr. 34 znaną lub oszacowaną wartość stosunku momentu bezwładności ob-
ciążenia do momentu bezwładności serwosilnika.
b Wpisać w Pr. 6 niską wartość współczynnika wzmocnienia regulatora położenia 1
c Wpisać w Pr. 37 wartość na tyle niską, by serwonapęd pracował bez wibracji i nienormal-
nego hałasu. Podwyższać tę wartość stopniowo aż do pojawienia się wibracji i/lub hałasu.
Jako optymalną przyjąć najwyższą wartość, dla której serwonapęd pracuje bez wibracji.
d Wpisać w Pr. 38 wartość, na tyle wysoką, by serwonapęd pracował bez wibracji i nienor-
malnego hałasu. Obniżać tę wartość stopniowo aż do pojawienia się wibracji i/lub hałasu.
Jako optymalną przyjąć najniższą wartość, dla której serwonapęd pracuje bez wibracji.
e Podwyższyć wartość współczynnika wzmocnienia regulatora położenia 1
f Jeżeli dalsze zmiany wg punktów c - e nie są możliwe z powodu zjawisk rezonansowych w
maszynie, a żądana dynamika serwonapędu nie została osiągnięta, należy powtórzyć
punkty c - e po zastosowaniu adaptacyjnego sterowania z automatycznym tłumieniem
wibracji (Pr. 60) lub filtrów antywibracyjnych (Pr. 58 i Pr. 59), tłumiących zjawiska rezonan-
sowe.
g Sprawdzając precyzję pozycjonowania i płynność obrotów silnika, dobrać precyzyjnie
wartości parametrów.
Reakcja regulatora położenia jest determinowana przez współczynnik wzmocnienia PG1
(Pr. 6). Wyższa wartość poprawia odwzorowanie sygnałów pozycji zadanej, lecz może być
przyczyną przerzutów w czasie dojścia do pozycji zadanej. Jako wartość orientacyjną dla PG1
można przyjąć:
Dynamika regulatora prędkości jest determinowana przez współczynnik wzmocnienia VG2
(Pr. 37). Wyższa wartość poprawia dynamikę odpowiedzi regulatora, lecz może być przyczyną
generowania wibracji. Częstotliwość graniczna pętli regulacji opisana jest wyrażeniem:
Jako orientacyjną wartość stałej czasowej członu I regulatora prędkości VIC (Pr. 38) można
przyjąć:
Parametr
Symbol
Nazwa
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
34
GD2
Współczynnik momentu bezwładności obciążenia
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
38
VIC
Stała czasowa członu I regulatora prędkości
Tab. 4-46: Parametry ustawiane ręcznie dla trybu regulacji położenia
PG1
VG2
1 GD2
+
(
)
-------------------------
1
3
--- do 1
5
---
×
≤
f gr [Hz]
VG2
1 GD2
+
(
) 2π
×
--------------------------------------
=
VIC [ms]
2000 do 3000
VG2 1 GD2 0,1
×
+
(
)
⁄
--------------------------------------------------------
≥
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 53
4.4.5 Interpolacja
Tryb interpolacji służy do dostrojenia współczynników wzmocnienia regulatorów w dwu lub
więcej serwowzmacniaczach, współpracujących w systemie wieloosiowym (np. stół X-Y). Aby
dopasować do siebie dokładność odwzorowania sygnałów zadających, współczynniki wzmoc-
nienia PG1 i VG1 są wpisywane ręcznie i ustalane, po czym następuje automatyczna optyma-
lizacja pozostałych parametrów regulatorów.
W poniższej tabeli zestawiono parametry, które są dostrajane automatycznie:
Poniższe parametry muszą być wpisane ręcznie i nie są optymalizowane:
Przy interpolacji między osiami wartości współczynników wzmocnienia regulatorów położenia
powinny być dla wszystkich osi jednakowe.
Ustawianie należy wykonywać wg poniższej procedury:
a Ustawić wartość Pr. 2 = "010m" i wykonać autotuning 1.
b Podwyższać poziom reakcji systemu (Pr. 2) stopniowo aż do pojawienia się wibracji. Jako
optymalną przyjąć najwyższą wartość, dla której serwonapęd pracuje bez wibracji.
c Odczytać wartości Pr. 6 i Pr. 36.
d Ustawić wartość Pr. 2 = "000m", tj. przejść do trybu interpolacji.
e Biorąc pod uwagę, że odczytana w pkt. c wartość Pr. 6 jest maksymalną dopuszczalną
wartością, wpisać w Pr. 6 wartość równą wartości tego parametru w serwowzmacniaczu
osi, z którą dokonujemy interpolacji.
f Biorąc pod uwagę, że odczytana w pkt. c wartość Pr. 36 jest najwyższą dopuszczalną
wartością oraz sprawdzając płynność obrotów wpisać w Pr. 36 wartość nie mniejszą, niż
trzykrotnie większa od wpisanej wartości Pr. 6.
g Sprawdzając precyzję pozycjonowania i płynność obrotów serwosilnika, dobrać precyzyjnie
wartości parametrów.
Reakcja regulatora położenia jest determinowana przez współczynnik wzmocnienia PG1
(Pr. 6). Wyższa wartość poprawia odwzorowanie sygnałów pozycji zadanej, lecz może być
przyczyną przerzutów w czasie dojścia do pozycji zadanej. Wielkość uchybu jest określona
przez następujące wyrażenie:
Dynamika regulatora prędkości 1 jest determinowana przez współczynnik wzmocnienia VG1
(Pr. 36). Dla zachowania odpowiedniej szybkości reakcji należy przyjąć orientacyjnie:
Parametr
Symbol
Nazwa
34
GD2
Współczynnik momentu bezwładności obciążenia
35
PG2
Współczynnik wzmocnienia regulatora położenia 2
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
38
VIC
Stała czasowa członu I regulatora prędkości
Tab. 4-47: Parametry, dostrajane automatycznie w trybie interpolacji
Parametr
Symbol
Nazwa
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
36
VG1
Współczynnik wzmocnienia regulatora prędkości 1
Tab. 4-48: Parametry, wpisywane ręcznie
Wielkosc uchybu [impulsy]
Predkosc [obr/min] 131072 [impulsow/obr]
×
PG1
-------------------------------------------------------------------------------------------------------------
=
VG1 PG1 3
×
≥
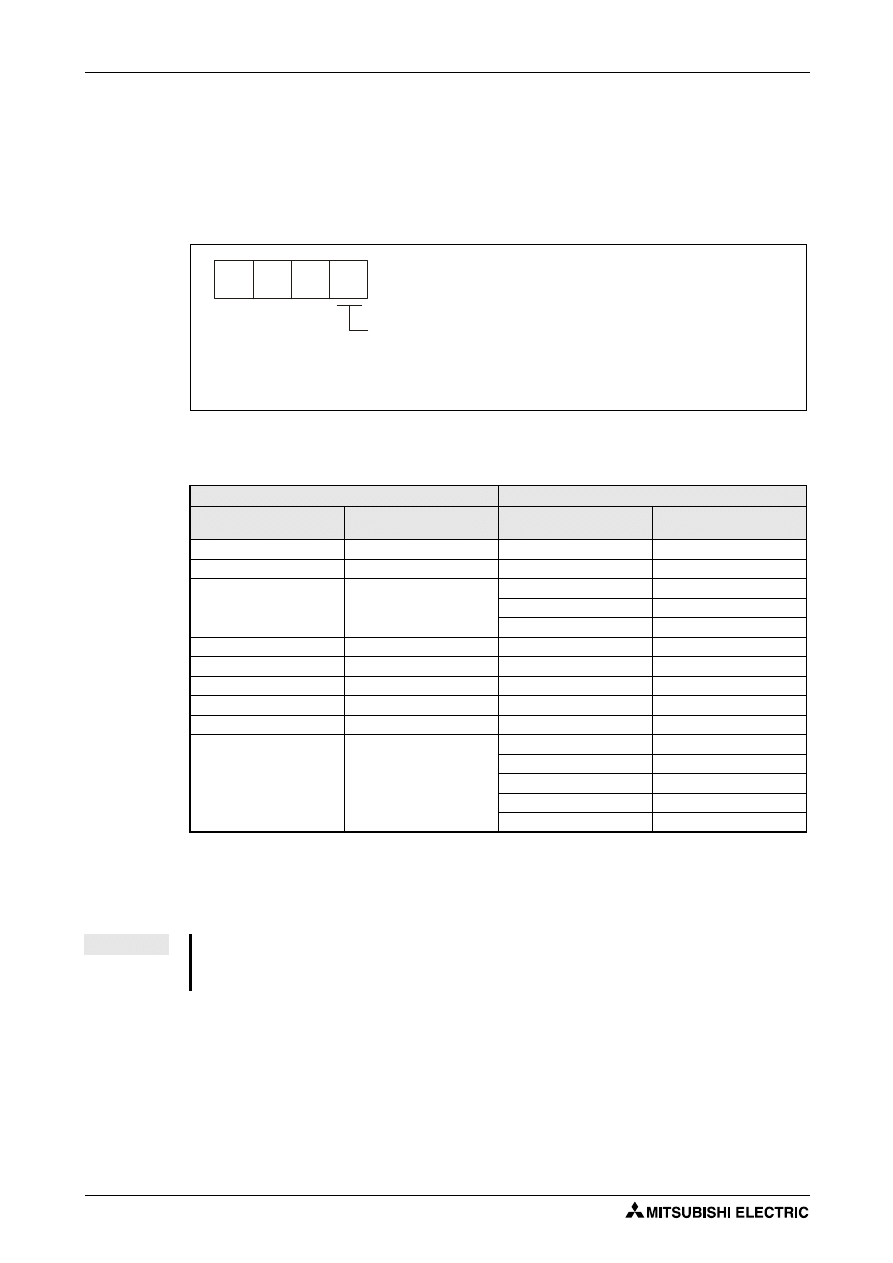
Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 54
4.4.6 Różnice między funkcją autotuningu w serwowzmacniaczach serii MR-J2
i MR-J2S
Określanie poziomu reakcji systemu
Aby dostosować się do wyższego poziomu dynamiki serwonapędu, zakres wartości poziomu
reakcji systemu jest dla serii MR-J2S szerszy, niż dla MR-J2.
S000873C
Rys. 4-54: Opis reakcji systemu w parametrze Pr. 2
MR-J2
MR-J2-Super
Reakcja systemu
Częstotliwość rezonan-
su własnego maszyny
Reakcja systemu
Częstotliwość rezonan-
su własnego maszyny
—
—
1
15 Hz
1
20 Hz
2
20 Hz
—
—
3
25 Hz
4
30 Hz
5
35 Hz
2
40 Hz
6
45 Hz
—
—
7
55 Hz
3
60 Hz
8
70 Hz
4
80 Hz
9
85 Hz
5
100 Hz
A
105 Hz
—
—
B
130 Hz
C
160 Hz
D
200 Hz
E
240 Hz
F
300 Hz
Tab. 4-49: Porównanie poziomów reakcji systemu
UWAGA
Z uwagi na zmodyfikowany sposób dostrajania współczynników wzmocnienia, wynikowa
reakcja serwonapędu może być nieco inna przy wykonaniu autotuningu w oparciu o tę samą
wartość częstotliwości rezonansowej.
2
Reakcja systemu
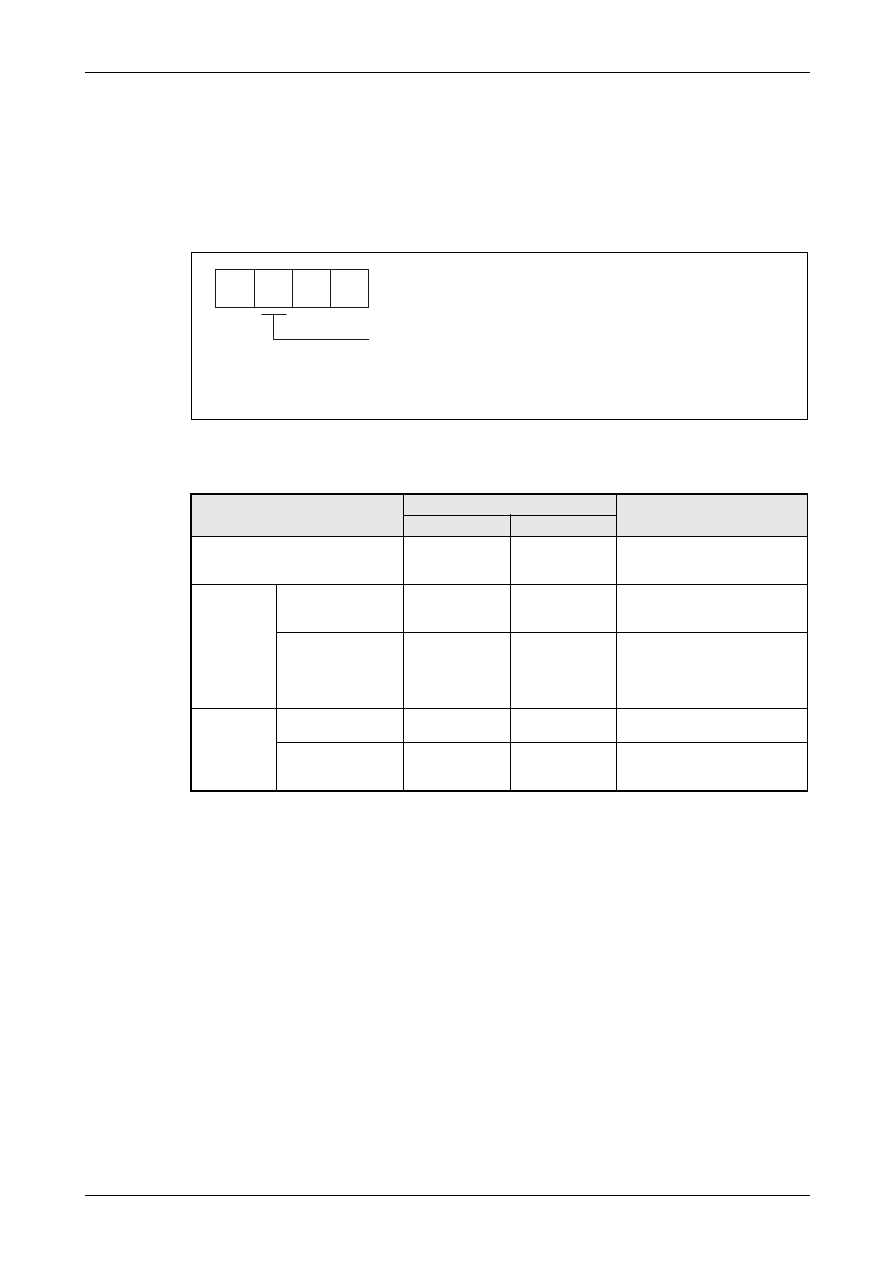
Optymalizacja parametrów serwowzmacniacza
Użytkowanie serwonapędu
Serwonapędy MR-J2Super-A
4 - 55
Wybór trybu autotuningu
Serwowzmacniacze serii MR-J2Super w porównaniu do MR-J2 posiadają dodatkowo:
●
tryb autotuningu 2, z ustaloną i wpisaną ręcznie wartością współczynnika momentu bezwładności ob-
ciążenia
●
tryb ręczny 1, z ręcznym wpisywaniem trzech parametrów i automatycznym dostrojeniem pozostałych
●
tryb interpolacji.
S000874C
Rys. 4-55: Wybór trybu autotuningu w Pr. 2
Metoda ustalania współczynników
wzmocnienia
Wybór trybu autotuningu (3. znak)
Opis
MR-J2
MR-J2Super
Tryb interpolacji
0
0
Ustalony i wpisany ręcznie
współczynnik wzmocnienia regu-
latora położenia 1 (PG1)
Autotuning
Autotuning 1
1
1
Automatyczny dobór współczynni-
ków wzmocnienia regulatorów
położenia i prędkości
Autotuning 2
—
2
Ocena współczynnika momentu
bezwładności obciążenia nie jest
wykonywana,
poziom reakcji systemu zadawany
przez użytkownika
Autotuning
wyłączony
Tryb ręczny 1
—
3
Uproszczone ustawianie ręczne
mniejszej ilości parametrów
Tryb ręczny 2
2
4
Ręczne ustawianie wartości
wszystkich współczynników
wzmocnienia
Tab. 4-50: Porównanie funkcji autotuningu
1
Wybór trybu autotuningu

Użytkowanie serwonapędu
Optymalizacja parametrów serwowzmacniacza
4 - 56
NOTATKI:
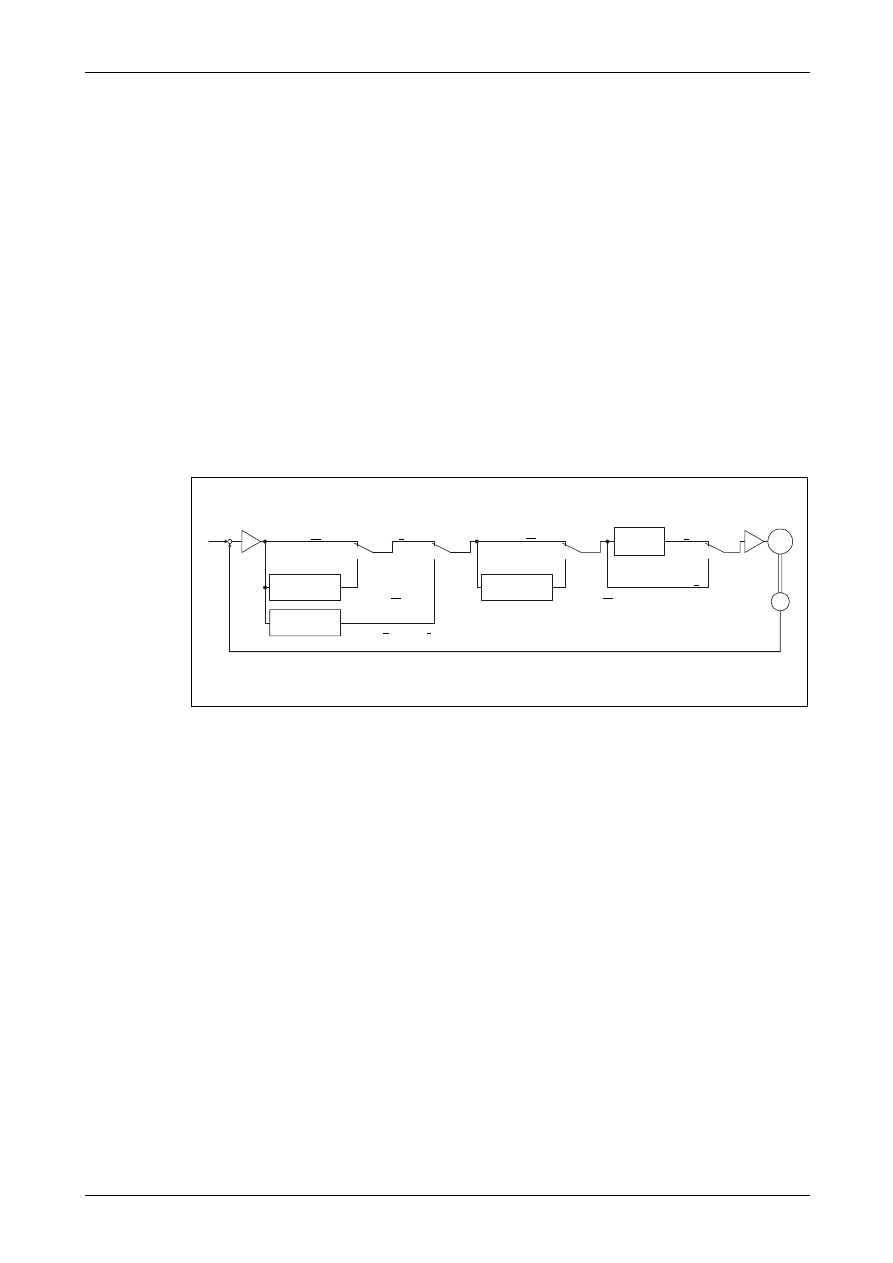
Filtry antywibracyjne
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 1
5
Funkcje specjalne
Dla większości aplikacji nie występuje konieczność wykorzystywania funkcji, opisanych w ninie-
jszym rozdziale. Należy ich używać w przypadkach, gdy procedury dostrajania, opisane w
Rozdz. 4.4 nie dają pożądanych rezultatów.
5.1 Filtry
antywibracyjne
Serwowzmacniacz MR-J2Super wyposażony jest w dwa rodzaje filtrów antywibracyjnych:
●
Zaporowy filtr wąskopasmowy, tłumiący rezonanse własne w układzie mechanicznym,
●
Filtr dolnoprzepustowy, tłumiący wibracje wysokiej częstotliwości.
Podwyższanie współczynników wzmocnienia regulatorów serwowzmacniacza może prowa-
dzić do pojawiania się hałasu lub wibracji z częstotliwościami, równymi częstotliwościom rezo-
nansu własnego układu mechanicznego. Filtry antywibracyjne służą do wytłumienia zjawisk re-
zonansowych.
S000875C
Rys. 5-1: Schemat blokowy filtrów antywibracyjnych
+
-
Filtr dolno-
przepust.
Wąskopasmowy
filtr zaporowy 1
Automatyczne
tłumienie wibracji
Regulator pręd-
kości
Pr. 58
Pr. 60
Pr. 59
Pr. 60
Wartość zadana
prądu
Enkoder
M
Wąskopasmowy
filtr zaporowy 2
mm00
inne niż mm00
m0mm
mm00
m1mm lub m2mm
inne niż mm00
mm1m
mm0m
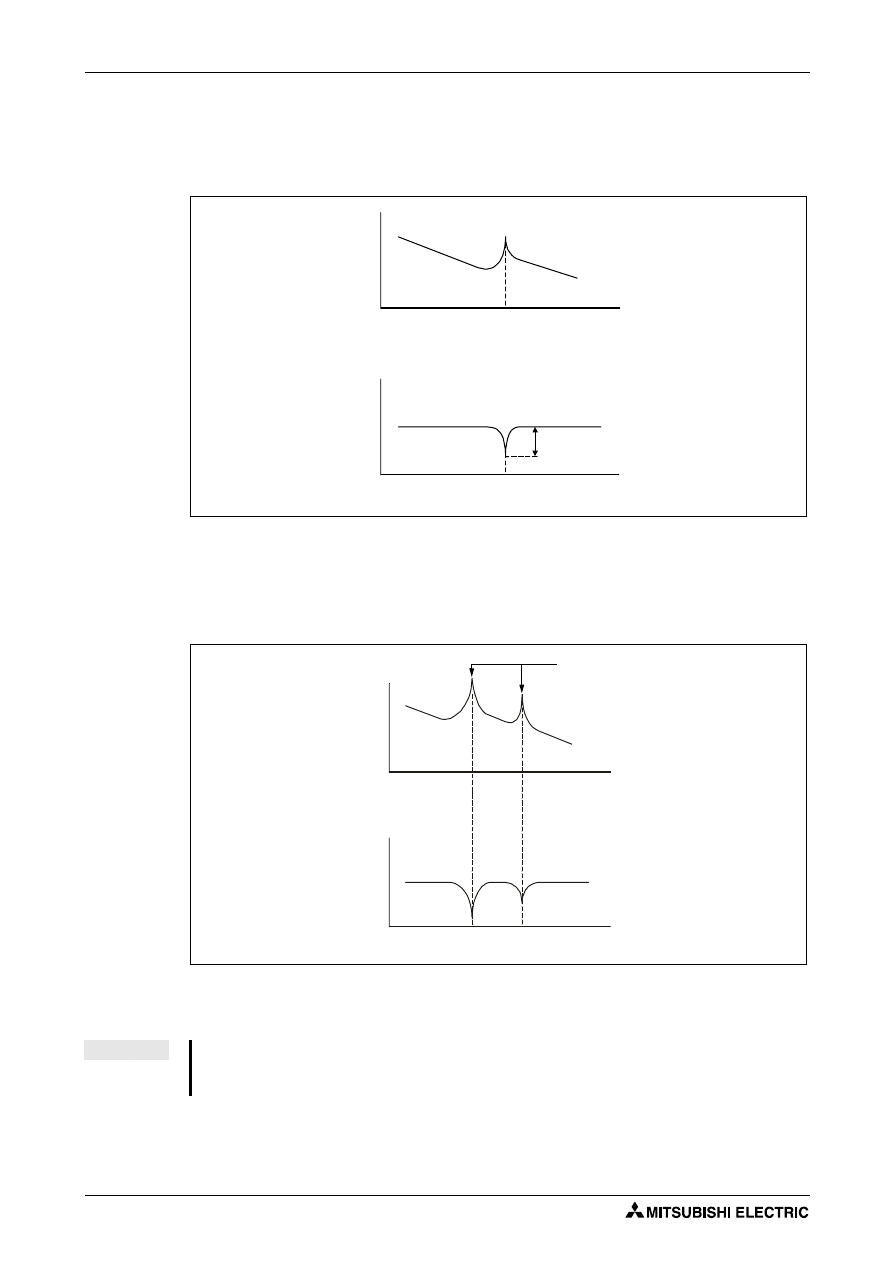
Funkcje specjalne
Filtry antywibracyjne
5 - 2
5.1.1 Filtry,
tłumiące rezonanse w układzie mechanicznym
Do tłumienia zjawisk rezonansowych w układzie mechanicznym służy wąskopasmowy filtr
zaporowy o regulowanej częstotliwości zaporowej i wartości tłumienia.
Serwowzmacniacz wyposażony jest w dwa filtry zaporowe, o niezależnie dobieranych charak-
terystykach: filtr 1, definiowany przez parametr Pr. 58, oraz filtr 2, definiowany przez parametr
Pr. 59. Jeżeli w parametrze Pr. 60 zostanie wybrana funkcja automatycznego tłumienia wibracji,
zastępuje ona filtr 1.
S000876C
Rys. 5-2: Zasada stosowania filtru do tłumienia rezonansu własnego maszyny
S000877C
Rys. 5-3: Sposób użycia filtrów 1 i 2
UWAGA
Zastosowanie filtra odpowiada wprowadzeniu do pętli regulacji automatycznej elementu
opóźniającego. Przy niewłaściwie dobranej częstotliwości lub głębokości tłumienia filtra
może to spowodować nasilenie wibracji.
Charakterystyka rezo-
nansowa układu
mechanicznego
Punkt rezonansu
Częstotliwość
Częstotliwość
Charakterystyka filtru
Częstotl. rezonansu
Tłumienie
Charakterystyka rezo-
nansowa układu
mechanicznego
Punkt rezonansu
Częstotliwość
Częstotliwość
Charakterystyka częs-
totliwościowa filtrów
Pr. 58
Pr. 59
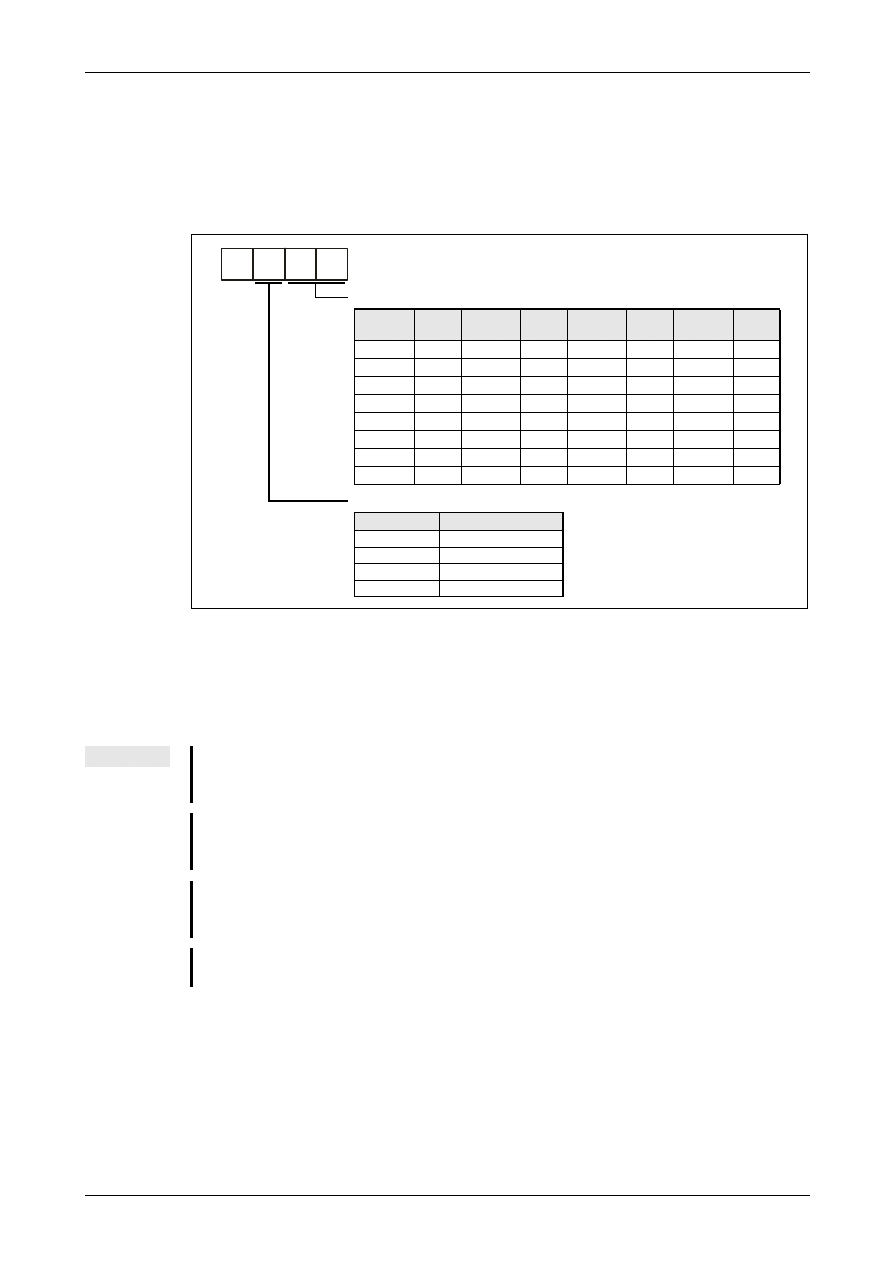
Filtry antywibracyjne
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 3
Parametry
●
Pierwszy filtr zaporowy (Pr. 58)
Częstotliwość własna oraz głębokość tłumienia filtra 1 określane są w parametrze Pr. 58.
Jeżeli jednak w parametrze Pr. 60 zostanie wybrana opcja „aktywne“ lub „podtrzymane“ dla
funkcji automatycznego tłumienia wibracji, wartość parametru Pr. 58 należy pozostawić
równą „0000“, gdyż filtr 1 jest nie aktywny.
●
Drugi filtr zaporowy (Pr. 59)
Sposób doboru wartości parametru Pr. 59 jest analogiczny do Pr. 58. Filtr 2 może jednak
być stosowany niezależnie od użycia funkcji automatycznego tłumienia wibracji (Pr. 60).
Rys. 5-4: Parametryzacja filtra zaporowego 1
UWAGI
Jeżeli częstotliwości rezonansu własnego maszyny są nieznane, należy początkowo wybrać
świadomie wysoką częstotliwość własną filtra i stopniowo ją obniżać. Optymalną jest ta war-
tość, przy której występuje minimum wibracji.
Większa wartość tłumienia zapewnia silniejsze tłumienie wibracji przy wybranej częstotli-
wości. Zarazem jednak wprowadza większe przesunięcie fazowe i może stać sie przyczyną
generowania wibracji.
Przy użyciu funkcji Analizatora maszyny w oprogramowaniu narzędziowym możliwe jest
prześledzenie charakterystyki częstotliwościowej maszyny. Pozwala to na dobór częstotli-
wości własnej i głębokości tłumienia filtrów.
Ustawienie w Pr. 58 i 59 bliskich sobie częstotliwości własnych przy dużych wartościach
tłumienia może wywołać rezonans.
0
Częstotliwość rezonansu [Hz]
Wartość Często-
tliwość Wartość
Często-
tliwość Wartość
Często-
tliwość Wartość
Często-
tliwość
00
—
08
562,5
10
281,3
18
187,5
01
4500
09
500
11
264,7
19
180
02
2250
0A
450
12
250
1A
173,1
03
1500
0B
409,1
13
236,8
1B
166,7
04
1125
0C
375
14
225
1C
160,1
05
900
0D
346,2
15
214,3
1D
155,2
06
750
0E
321,4
16
204,5
1E
150
07
642,9
0F
300
17
195,7
1F
145,2
Tłumienie [dB]
Wartość
Tłumienie
00
40
01
14
02
8
03
4
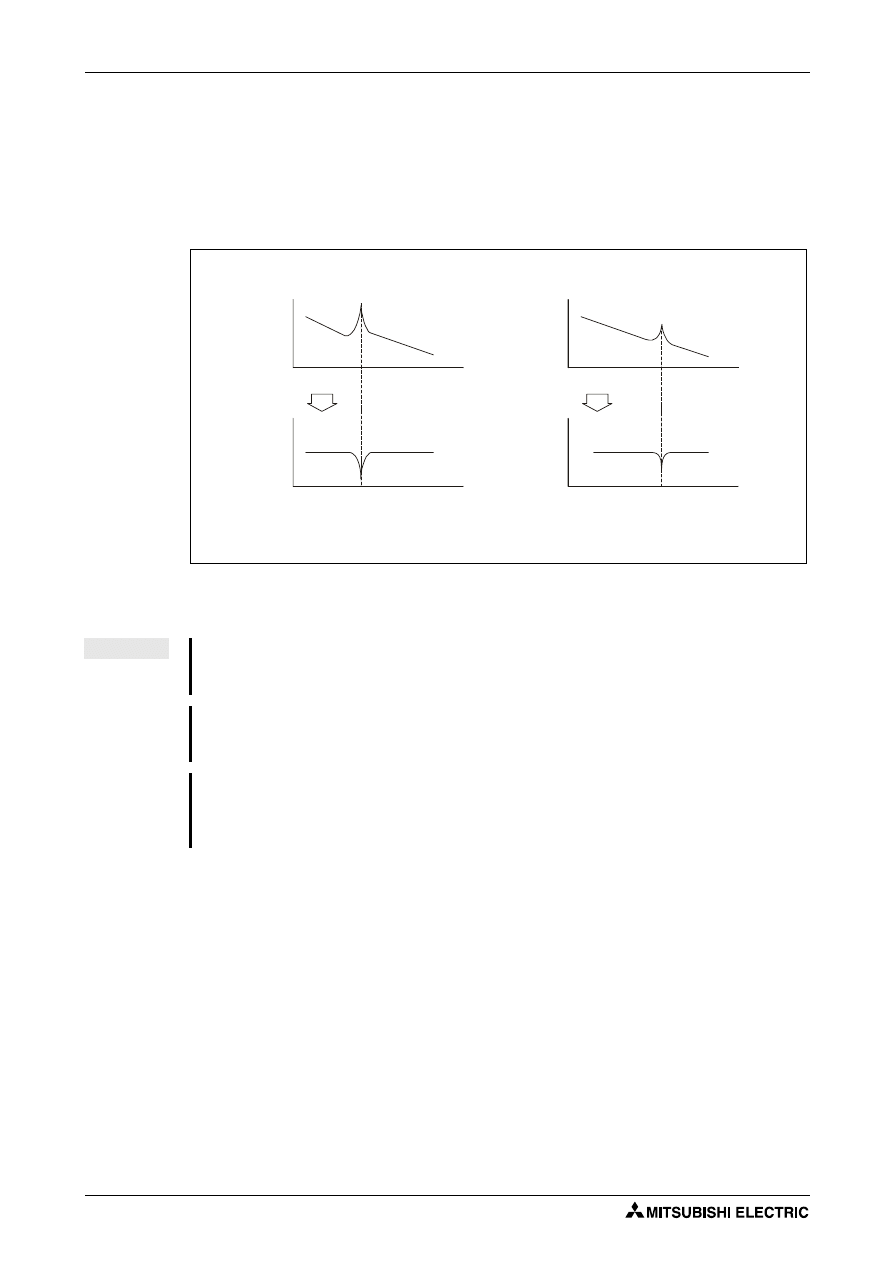
Funkcje specjalne
Filtry antywibracyjne
5 - 4
5.1.2 Automatyczne
tłumienie wibracji
Użycie funkcji automatycznego tłumienia wibracji powoduje że serwowzmacniacz nieprzer-
wanie odnajduje częstotliowość rezonansu własnego maszyny i odpowiednio modyfikuje
parametry filtra zaporowego (częstotliwość i tłumienie). Użytkownik nie musi więc znać tych
wartości, mogą też one zmieniać się w czasie, a system samoczynnie zmodyfikuje charaktery-
styki filtra.
S000878C
Rys. 5-5: Zasada działania automatycznego tłumienia wibracji
UWAGI
Funkcja automatycznego tłumienia wibracji jest skuteczna w zakresie częstotliwości około
150 do 500 Hz. Jeżeli rezonans występuje poza tym zakresem częstotliwości, należy
używać filtrów wąskopasmowych.
W systemach mechanicznych o złożonej charakterystyce rezonansowej lub przy znacznej
amplitudzie wibracji działanie funkcji automatycznego tłumienia wibracji może nie być wys-
tarczające.
W systemach, gdzie występują skokowe zmiany momentu obciążenia, wykrywanie częstotli-
wości rezonansu może chwilowo zawodzić, doprowadzając do krótkotrwałego nasilenia
wibracji. W takim przypadku należy wybrać opcję "podtrzymania" funkcji (wartość Pr. 60
równa „m2mm“), co powoduje ustalenie parametrów filtra.
Niska częstotliwość, wysoka amplituda
rezonansu
Niska amplituda, wysoka częstotliwość
rezonansu
Charakterysty-
ka rezonan-
sowa maszyny
Punkt rezonansu
Częstotliwość
Charaktery-
styka filtra
Częstotliwość własna
Częstotliwoś
Częstotliwość
Częstotliwoś
Charakterysty-
ka rezonan-
sowa maszyny
Charaktery-
styka filtra
Częstotliwość własna
Punkt rezonansu
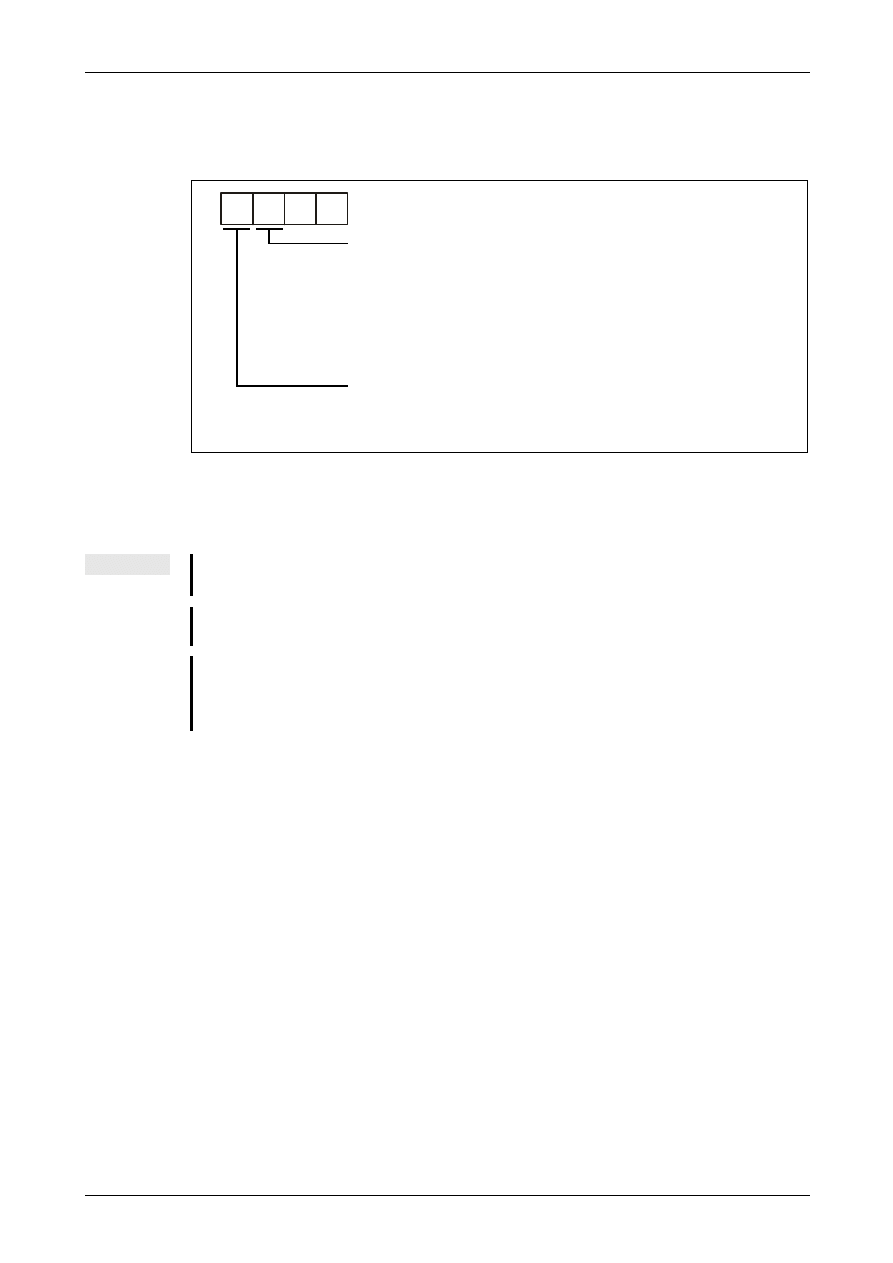
Filtry antywibracyjne
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 5
Parametry
Funkcja automatycznego tłumienia wibracji jest parametryzowana przez trzeci i czwarty znak
parametru Pr. 60.
Rys. 5-6: Parametryzacja funkcji automatycznego tłumienia wibracji
UWAGI
Przy ustawieniach fabrycznych funkcja automatycznego tłumienia wibracji nie jest aktywna
(Pr. 60 = „0000“).
Podczas pracy parametry filtra są zapisywane co 6 minut w pamięci EEPROM. Przy kole-
jnym załączeniu zasilania przyjmowane są ostatnio zapisane wartości.
Czwarta cyfra parametru Pr. 60 określa czułość wykrywania wibracji. Wybór podwyższonej
czułości pozwala wykrywać i tłumić wibracje o niższej amplitudzie. Ponieważ jednak
zarazem wprowadza się większe przesunięcie fazowe, dynamika systemu może nie ulec
poprawie.
Automatyczne tłumienie wibracji
Jeżeli funkcja zostaje uaktywniona przez wybór opcji "aktywne“ lub „podtrzymane“,
funkcja ta zastępuje pierwszy filtr antywibracyjny (Pr. 58).
0: nie aktywne
1: aktywne (Częstotliwość rezonansowa maszyny jest wykrywana automatycznie
i definiowany jest odpowiedni filtr)
2: podtrzymane (Kontynuowane jest działanie filtra z wcześniej ustawionymi
charakterystykami, dalsza automatyczna detekcja nie jest wykonywana)
Czułość automatycznej detekcji wibracji
0: normalna czułość
1: podwyższona czułość
0
0
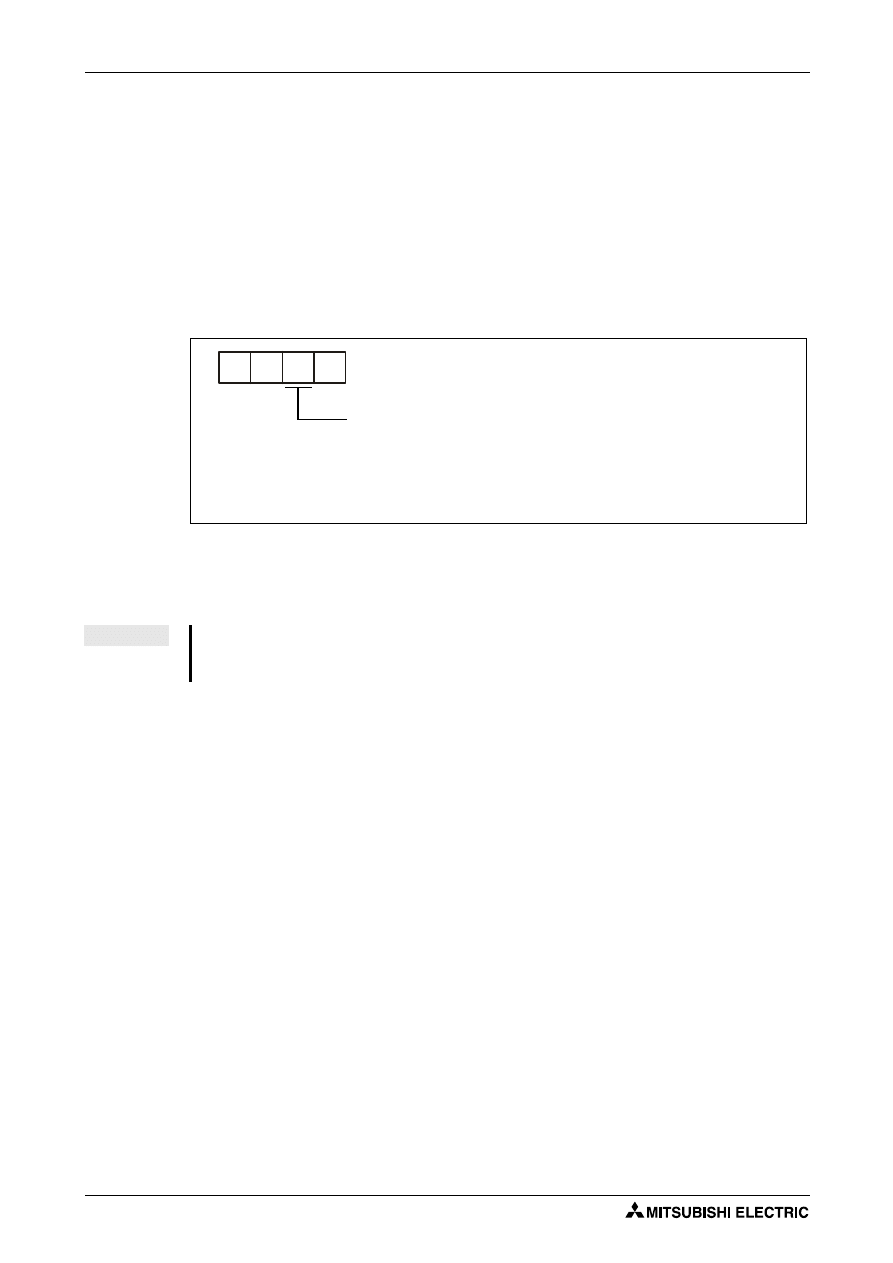
Funkcje specjalne
Filtry antywibracyjne
5 - 6
5.1.3 Filtr
dolnoprzepustowy
W napędach ze śrubą pociągową itp. przy podwyższaniu współczynników wzmocnienia mogą
pojawiać się zjawiska rezonansowe o wysokich częstotliwościach. Aby im zapobiec, stosuje się
filtr dolnoprzepustowy w torze zadawania momentu. Częstotliwość graniczna tego filtra dobie-
rana jest automatycznie wg poniższej zależności:
Parametry
Filtr dolnoprzepustowy aktywizuje się przez wybór drugiej cyfry parametru Pr. 60.
Rys. 5-7: Parametryzacja filtra dolnoprzepustowego
UWAGA
W systemach o bardzo wysokiej sztywności, gdzie zjawiska rezonansowe są bardzo słabo
wyrażone, wyłączenie filtra dolnoprzepustowego może pozwolić uzyskać poprawę dynamiki
regulacji i skrócenie czasu dojścia.
fgr Hz
[
]
VG2 10
×
2
π 1 + GD2 0,1
×
(
)
---------------------------------------------------
=
Filtr dolnoprzepustowy
0: aktywny (dostrajanie automatyczne)
←
ustawienie fabryczne!
1: nie aktywne
0
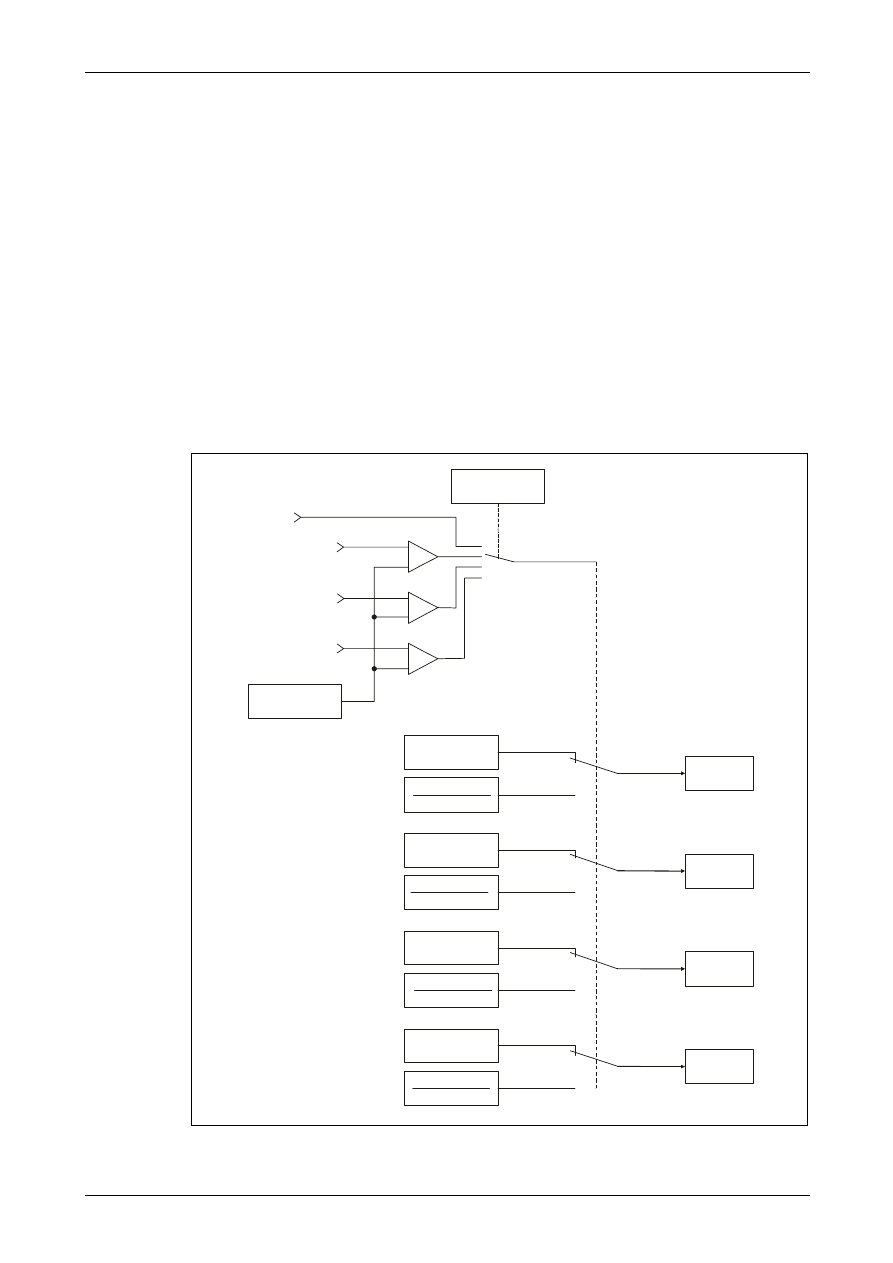
Przełączanie wartości współczynników wzmocnienia
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 7
5.2 Przełączanie wartości współczynników wzmocnienia
Funkcja przełączania wartości współczynników wzmocnienia pozwala na wybór różnych war-
tości wzmocnienia np. w ruchu i podczas postoju, lub przełączanie wartości współczynników
wzmocnienia zewnętrznym sygnałem podczas pracy.
Przykładowe zastosowania funkcji przełączania wartości współczynników wzmocnienia:
●
wybór większych wartości wzmocnienia w stanie servo-lock i mniejszych podczas ruchu, w
celu obniżenia hałasu silnika,
●
wybór większych wartości wzmocnienia podczas pozycjonowania w celu skrócenia czasu
dojścia,
●
zmiana wartości współczynników wzmocnienia sygnałem zewnętrznym w celu zapewnienia
stabilności serwonapędu w przypadku znacznej zmiany współczynnika momentu bezwład-
ności przy zatrzymanym silniku (np. załadowanie na podajnik dużego obciążenia).
Aktywne wartości współczynników PG2, VG2, VIC oraz GD2 są przełączane zgodnie z kryte-
rium, określanym przez parametry CDP (Pr. 65) i CDS (Pr. 66).
S000879C
Rys. 5-8: Schemat blokowy funkcji przełączania współczynników wzmocnienia
+
-
+
-
+
-
CDS
Pr. 66
GD2
PG2
GD2
GD2B
X
PG2
PG2B
X
100
100
VG2
VG2
VG2B
X
100
VIC
VIC
VICB
X
100
CDP
Pr. 65
Pr. 34
Pr. 35
Pr. 37
Pr. 38
Sygnał zewnętrzny
Częstotliwość
ciągu
Impulsy uchybu
Prędkość
Komparator
Przełączanie
aktywna war-
tość
GD2
aktywna war-
tość
PG2
aktywna war-
tość
VG2
aktywna war-
tość
VIC
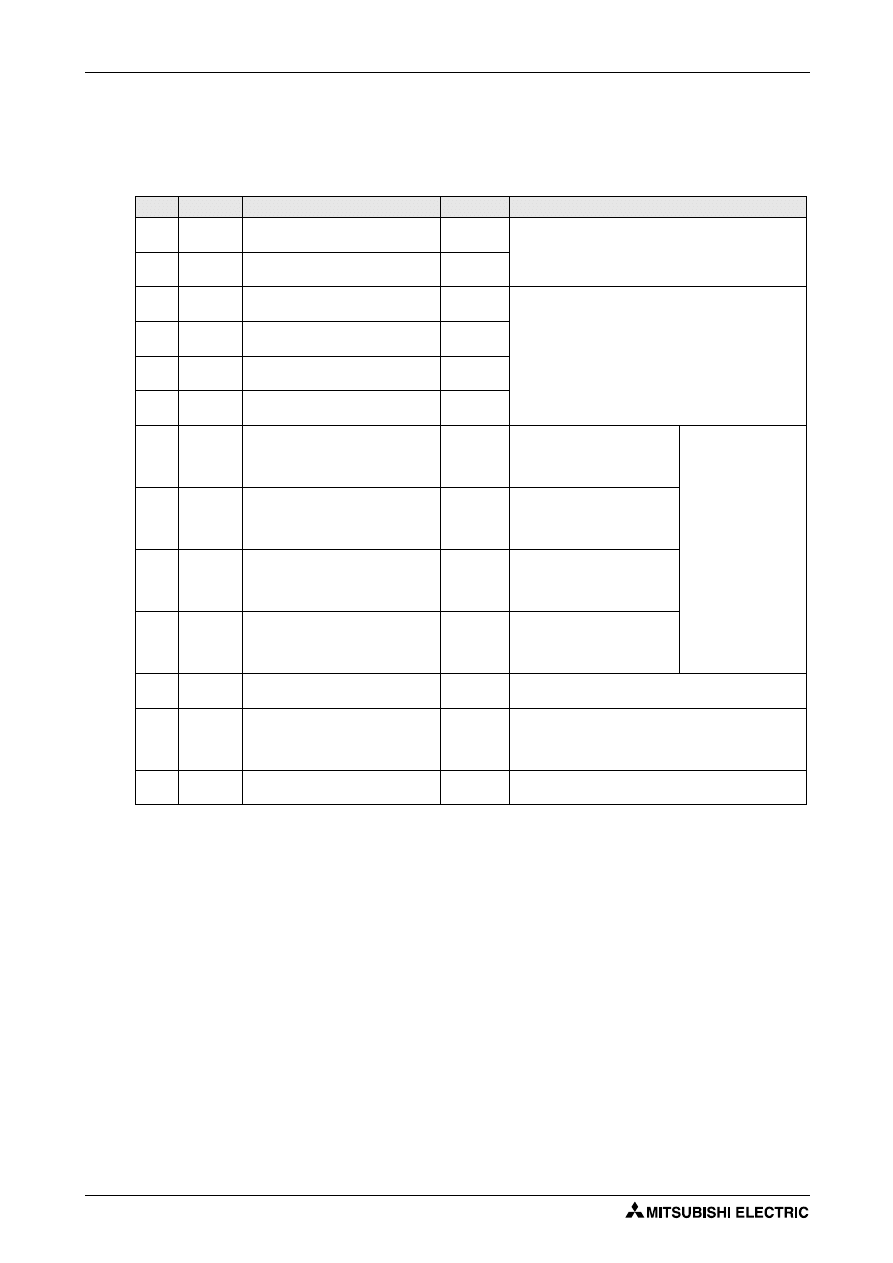
Funkcje specjalne
Przełączanie wartości współczynników wzmocnienia
5 - 8
Parametry
Aby uruchomić funkcję przełączania wartości współczynników wzmocnienia, należy nadać
parametrowi Pr. 2 wartość „m4mm“. Jeżeli w parametrze Pr. 2 wybrano dowolny z trybów au-
totuningu, przełączanie wartości nie jest możliwe.
●
Parametr Pr. 6 oraz Pr. 34 do 38
Wartości parametrów wpisane ręcznie. Spośród nich wartości Pr. 6 (PG1) oraz Pr. 36 (VG1)
pozostają aktywne po przełączeniu, zaś wartości wspólczynników wzmocnienia,
zadawanych przez parametry GD2, PG2, VG2 i VIC podlegają zmianie.
●
Współczynnik momentów bezwładności obciążenia i serwosilnika (GD2B: Pr. 61)
Należy podać wartość, jaką po przełączeniu ma iloraz wielkości momentu bezwładności
obciążenia do momentu bezwładności serwosilnika. Jeżeli wartość ta przy przełączeniu nie
powinna ulegać zmianie, należy wpisać wartość równą wartości parametru Pr. 34 (GD2),
opisującego współczynnik momentów bezwładności przed przełączeniem.
Pr.
Symbol
Nazwa
Jednostka
Opis
6
PG1
Współczynnik wzmocnienia regula-
tora położenia 1
rad/s
Współczynniki wzmocnienia regulatorów prędkości i
położenia, określające odpowiedź na sygnały
zadające. Wartości te są niezmienne.
36
VG1
Współczynnik wzmocnienia regula-
tora prędkości 1
rad/s
34
GD2
Współczynnik momentu
bezwładności obciążenia
× 0,1
Parametry regulatorów przed przełączeniem
35
PG2
Współczynnik wzmocnienia regula-
tora położenia 2
rad/s
37
VG2
Współczynnik wzmocnienia regula-
tora prędkości 2
rad/s
38
VIC
Stała czasowa członu I regulatora
prędkości
ms
61
GD2B
Druga wartość ilorazu momentu
bezwładności obciążenia do
momentu bezwładności ser-
wosilnika
× 0,1
Iloraz momentu bezwładności
obciążenia do momentu
bezwładności serwosilnika -
wartość po przełączeniu
Parametry aktywne
po przełączeniu war-
tości współczynników
62
PG2B
Zmiana współczynnika wzmoc-
nienia regulatora położenia 2
%
Iloraz wartości współczynnika
wzmocnienia PG2 po
przełączeniu do jego wartości
przed przełączeniem
63
VG2B
Zmiana współczynnika wzmoc-
nienia regulatora prędkości 2
%
Iloraz wartości współczynnika
wzmocnienia VG2 po
przełączeniu do jego wartości
przed przełączeniem
64
VICB
Zmiana stałej czasowej członu I
regulatora prędkości
%
Iloraz wartości współczynnika
wzmocnienia VCI po
przełączeniu do jego wartości
przed przełączeniem
65
CDP
Wybór kryterium przełączania
parametrów regulatorów
—
Wybór parametru, zmiana którego powoduje
przełączenie wartości współczynników wzmocnienia
66
CDS
Wartość progowa kryterium
przełączenia parametrów regula-
torów
kHz,
impulsów,
obr/min
Określenie wartości parametru, wybranego w Pr. 66
(częstotliwość ciągu impulsów, uchyb, prędkość),
której przekroczenie powoduje przełączenie wartości
współczynników wzmocnienia
67
CDT
Stała czasowa zmiany wartości
parametrów regulatorów
ms
Stała czasowa, z którą przebiega zmiana wartości
przełączanych parametrów
Tab. 5-1: Parametry funkcji przełączania współczynników wzmocnienia
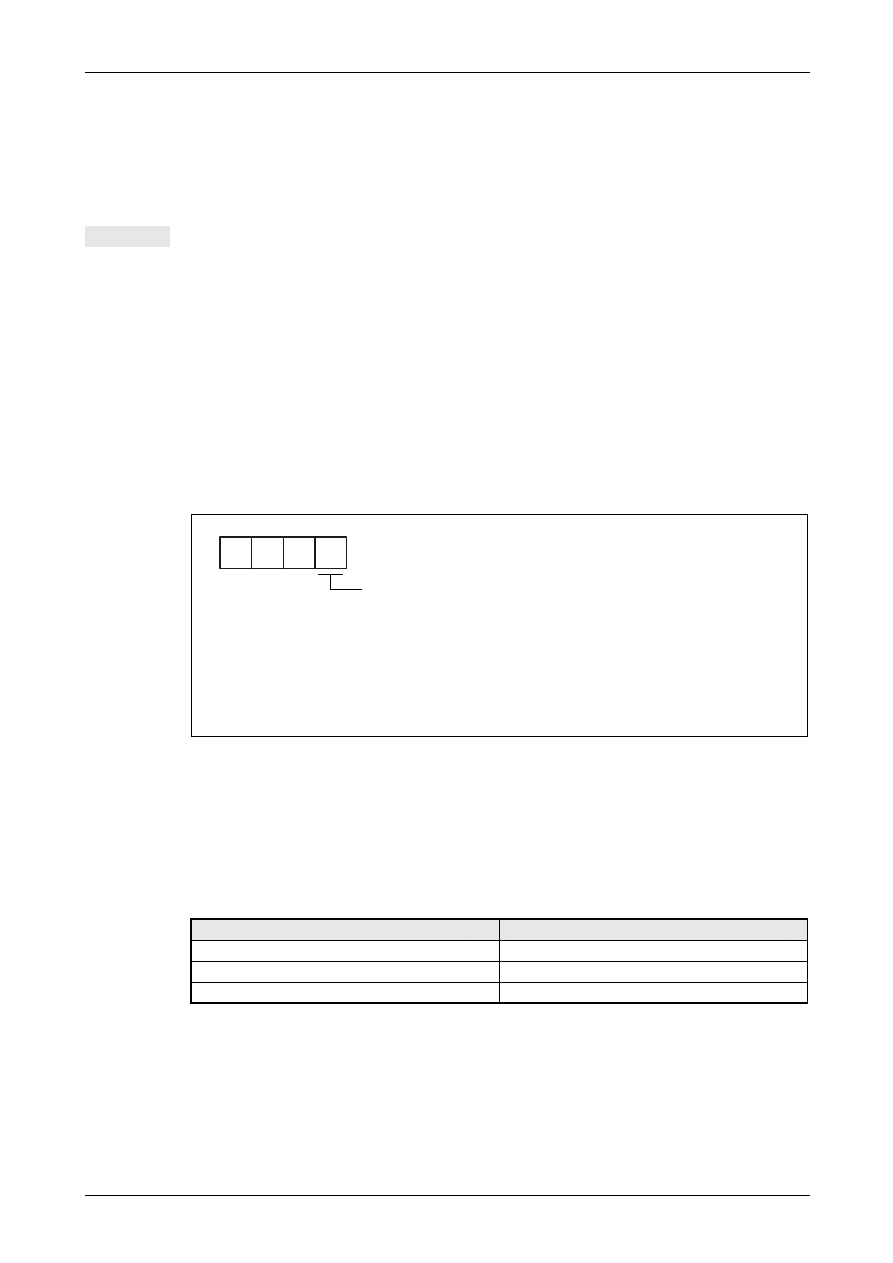
Przełączanie wartości współczynników wzmocnienia
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 9
●
Parametr Pr. 62, 63 i 64
Wartości parametrów Pr. 62, 63 i 64 określają w % współczynniki, o jakie zmieniają się przy
przełączeniu wartości (odpowiednio): współczynnika wzmocnienia regulatora położenia 2
(PG2), współczynnika wzmocnienia regulatora prędkości 2 (VG2) i stała czasowa członu I
regulatora prędkości (VIC). Wpisanie wartości 100 % powoduje, że odpowiednia wielkość
pozostaje niezmienna.
●
Wybór kryterium przełączania parametrów regulatorów (CDP: Pr. 65)
Pierwsza cyfra parametru Pr. 65 służy do określenia kryterium, zmiana którego spowoduje
przełączenie współczynników wzmocnienia. Wpisanie wartości "1" powoduje przełączanie
przy podaniu zewnętrznego sygnału CDP. Sygnał ten należy uprzednio przypisać do
wybranego zacisku przy pomocy jednego z Pr. 43 do 48.
●
Próg przełączenia parametrów regulatorów (CDS: Pr. 66)
Jeżeli w Pr. 65 wybrano jako kryterium wartość częstotliwości ciągu impulsów, uchybu
położenia lub prędkości serwosilnika, parametr Pr. 66 określa wartość progową wybranej
wielkości, przy przekroczeniu której następuje przełączenie parametrów regulatorów. Jed-
nostką jest, odpowiednio:
●
Stała czasowa zmiany wartości parametrów regulatorów (CDT: Pr. 67)
Stała czasowa, z którą zmieniają się wartości parametrów przy ich przełączeniu. Parametr służy
do zapewnienia płynnej pracy maszyny bez wstrżąsów i wibracji przy znacznej zmianie wartości
współczynników.
PRZYKŁAD
Przy wpisaniu wartości:
PG2 = 100, VG2 = 2000, VIC = 20, PG2B = 180 %, VG2B = 150 % i VICB = 80 % otrzy-
mamy po przełączeniu następujące wartości:
Współczynnik wzmocnienia regulatora położenia 2 = PG2
×
PG2B/100 = 180 rad/s
Współczynnik wzmocnienia regulatora prędkości 2 = VG2
×
VG2B/100 = 3000 rad/s
Stała czasowa członu I regulatora prędkości = VIC
×
VICB/100 = 16 ms
m
Rys. 5-9: Przełączanie współczynników wzmocnienia
Kryterium
Jednostka
Częstotliwość ciągu impulsów
kHz
Uchyb
impuls
Prędkość
obr/min
Tab. 5-2: Kryterium przełączania współczynników wzmocnienia
0 0
0
Kryterium przełączania:
Parametry regulatorów są przełączane zgodnie z wartościami Pr. 61 do 64, gdy
zostanie spełniony wybrany warunek (1-4):
0: funkcja nie jest aktywna
1: Załączony jest sygnał przełączania (CDP).
2: Częstotliwość impulsów jest równa lub większa od wartości parametru Pr. 66.
3: Uchyb (w impulsach) jest równy lub większy od wartości parametru Pr. 66.
4: Prędkość serwosilnika jest równa lub większa od wartości parametru Pr. 66.
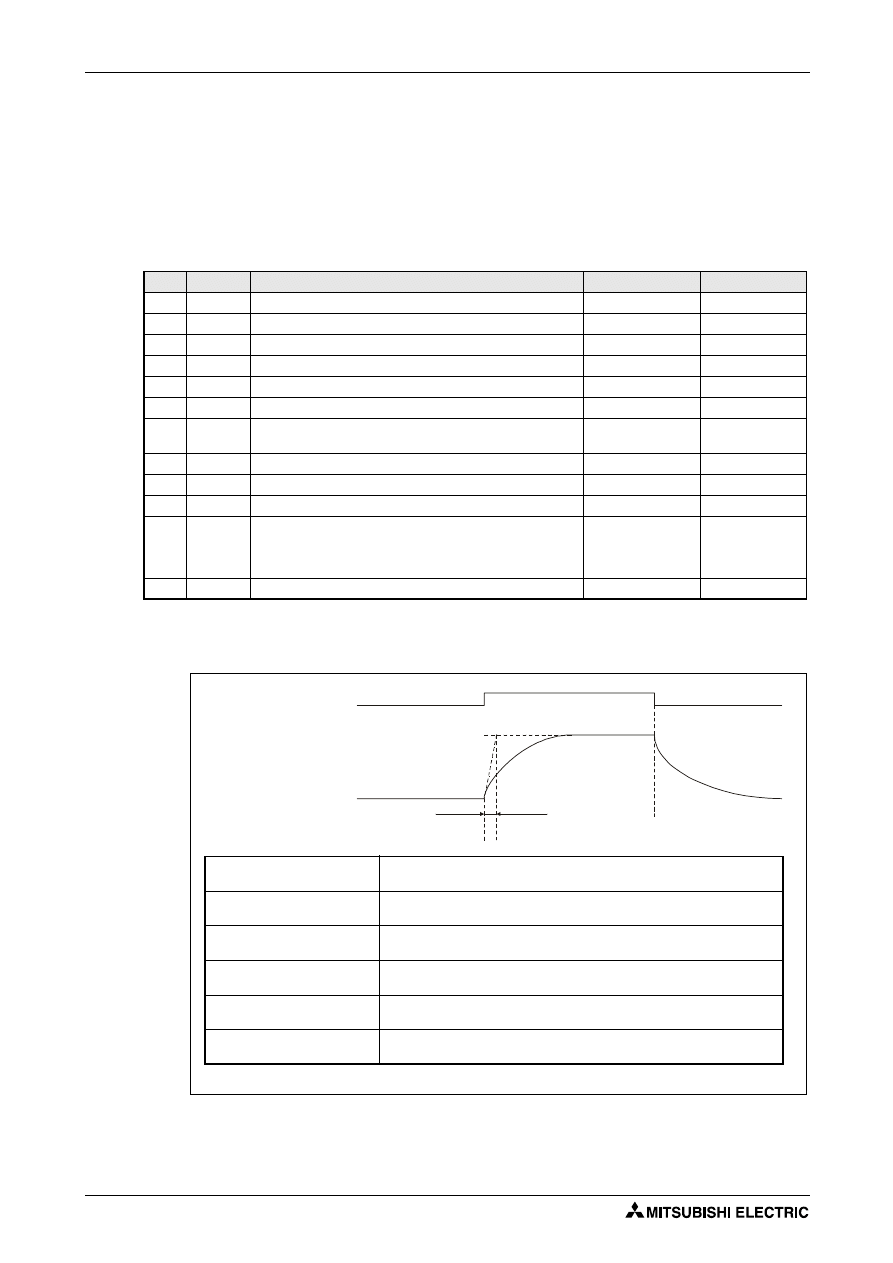
Funkcje specjalne
Przełączanie wartości współczynników wzmocnienia
5 - 10
5.2.1 Przebieg
przełączania współczynników wzmocnienia
W niniejszym rozdziale wyjaśnimy na przykładach przebieg operacji przełączania współczyn-
ników wzmocnienia.
Przełączanie sygnałem zewnętrznym
Pr.
Symbol
Nazwa
Wartość
Jednostka
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
100
rad/s
36
VG1
Współczynnik wzmocnienia regulatora prędkości 1
1000
rad/s
34
GD2
Współczynnik momentu bezwładności obciążenia
40
× 0,1
35
PG2
Współczynnik wzmocnienia regulatora położenia 2
120
rad/s
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
3000
rad/s
38
VIC
Stała czasowa członu I regulatora prędkości
20
ms
61
GD2B
Druga wartość ilorazu momentu bezwładności obciążenia do
momentu bezwładności serwosilnika
100
× 0,1
62
PG2B
Zmiana współczynnika wzmocnienia regulatora położenia 2
70
%
63
VG2B
Zmiana współczynnika wzmocnienia regulatora prędkości 2
133
%
64
VICB
Zmiana stałej czasowej członu I regulatora prędkości
250
%
65
CDP
Wybór kryterium przełączania parametrów regulatorów
0001
(przełączanie
sygnałem logicznym
na zacisku CN1A-8)
—
67
CDT
Stała czasowa zmiany wartości parametrów regulatorów
100
ms
Tab. 5-3: Przykładowe wartości parametrów
S000880C
Rys. 5-10: Przebieg zmian wartości parametrów regulatora przy ich przełączaniu
CDT=100ms
Sygnał przełączenia
(CDP)
OFF
OFF
ON
Zmiana wzmocnienia
Wzmocnienie przed
przełączeniem
Wzmocnienie po
przełączeniu
Współczynnik wzmocnienia
regulatora położenia 1
100
Współczynnik wzmocnienia
regulatora prędkości 1
1000
Współczynnik momentu
bezwładności obciążenia
4,0
→
10,0
→
4,0
Współczynnik wzmocnienia
regulatora położenia 2
120
→
84
→
120
Współczynnik wzmocnienia
regulatora prędkości 2
3000
→
3990
→
3000
Stała czasowa członu I regula-
tora prędkości
20
→
50
→
20
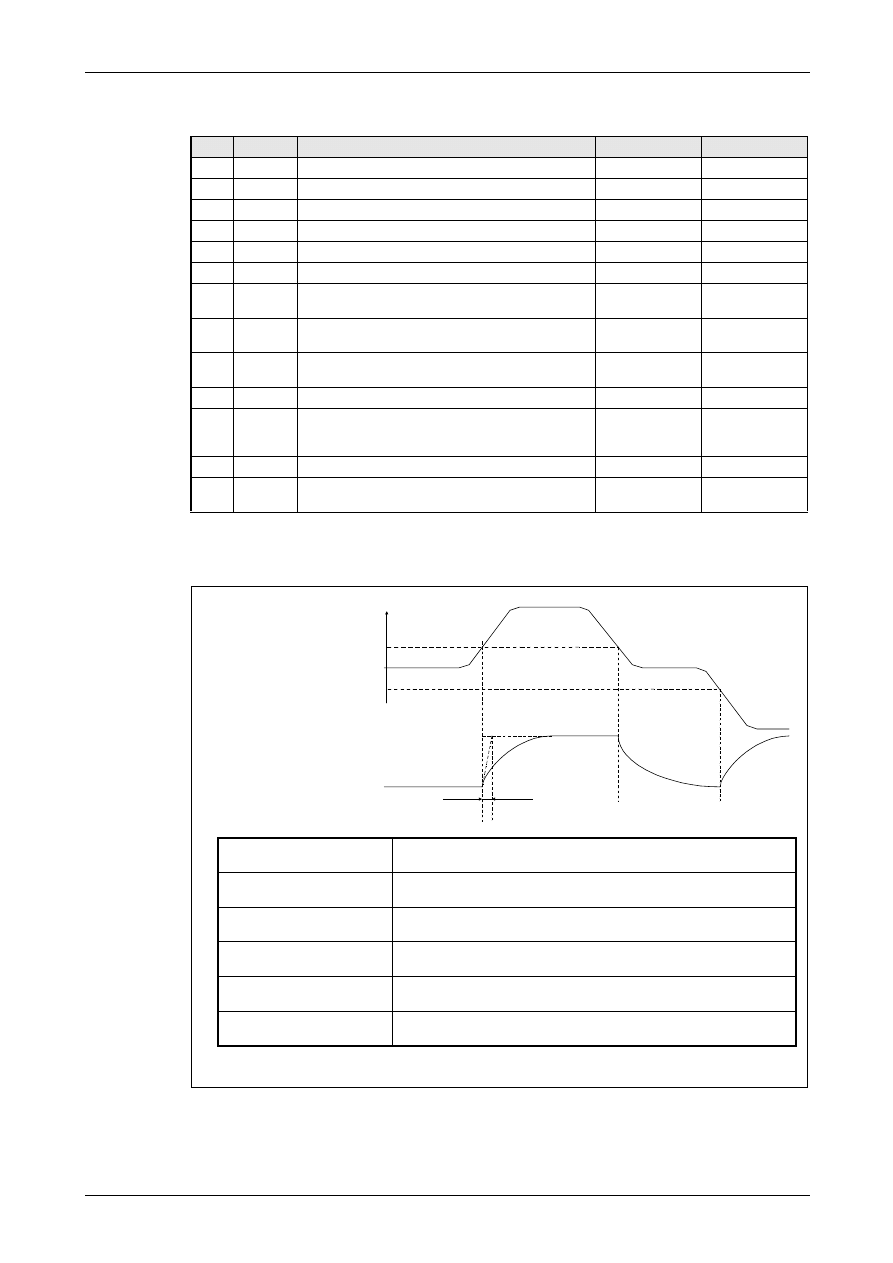
Przełączanie wartości współczynników wzmocnienia
Funkcje specjalne
Serwonapędy MELSERVO MR-J2Super-A
5 - 11
Przełączanie przy wybranej wartości uchybu
Pr.
Symbol
Nazwa
Wartość
Jednostka
6
PG1
Współczynnik wzmocnienia regulatora położenia 1
100
rad/s
36
VG1
Współczynnik wzmocnienia regulatora prędkości 1
1000
rad/s
34
GD2
Współczynnik momentu bezwładności obciążenia
40
× 0,1
35
PG2
Współczynnik wzmocnienia regulatora położenia 2
120
rad/s
37
VG2
Współczynnik wzmocnienia regulatora prędkości 2
3000
rad/s
38
VIC
Stała czasowa członu I regulatora prędkości
20
ms
61
GD2B
Druga wartość ilorazu momentu bezwładności
obciążenia do momentu bezwładności serwosilnika
100
× 0,1
62
PG2B
Zmiana współczynnika wzmocnienia regulatora
położenia 2
70
%
63
VG2B
Zmiana współczynnika wzmocnienia regulatora pręd-
kości 2
133
%
64
VICB
Zmiana stałej czasowej członu I regulatora prędkości
250
%
65
CDP
Wybór kryterium przełączania parametrów regula-
torów
0003 (Przełącza-
nie progiem war-
tości uchybu)
—
66
CDS
Wartość progowa kryterium przełączenia 50
impulsów
67
CDT
Stała czasowa zmiany wartości parametrów regula-
torów
100
ms
Tab. 5-4: Przykładowe wartości parametrów
S000881C
Rys. 5-11: Przebieg zmian wartości parametrów regulatora przy ich przełączaniu
CDT = 100 ms
+CDS
−CDS
0
Współczynnik wzmocnienia
regulatora położenia 1
100
Współczynnik wzmocnienia
regulatora prędkości 1
1000
Współczynnik momentu
bezwładności obciążenia
4,0
→
10,0
→
4,0
→
10,0
Współczynnik wzmocnienia
regulatora położenia 2
120
→
84
→
120
→
84
Współczynnik wzmocnienia
regulatora prędkości 2
3000
→
3990
→
3000
→
3990
Stała czasowa członu I regula-
tora prędkości
20
→
50
→
20
→
50
Uchyb (Impulsów)
Wzmocnienie przed
przełączeniem
Wzmocnienie po
przełączeniu
Zmiana współczynników
wzmocnienia

Funkcje specjalne
Przełączanie wartości współczynników wzmocnienia
5 - 12
NOTATKI:
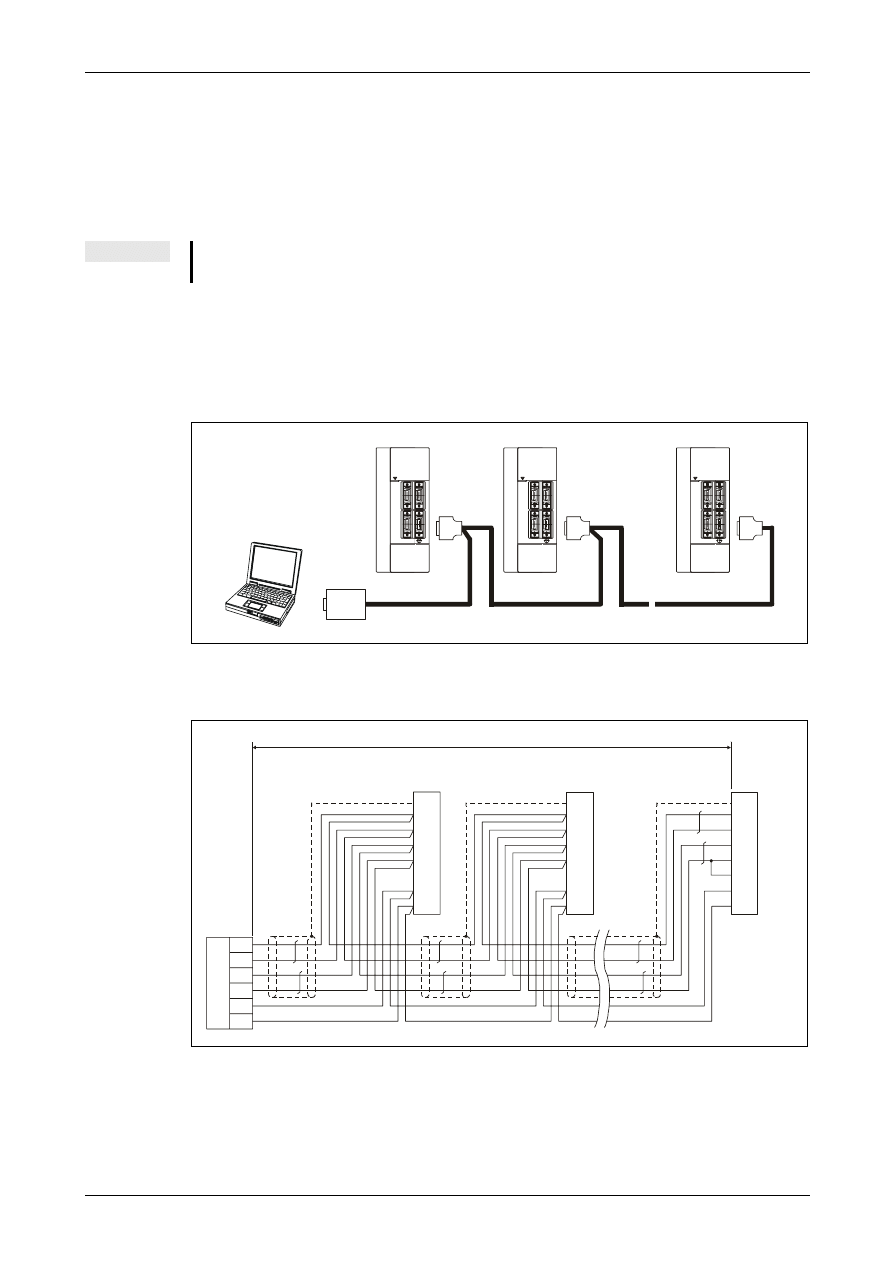
Konfiguracja systemu
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 1
6
Komunikacja
Serwowzmacniacz MR-J2-Super jest wyposażony w złącze komunikacji szeregowej, pracujące
w standardzie RS422/RS232C. Umożliwia to sterowanie serwonapędem, odczyt i zapis war-
tości parametrów, monitorowanie oraz diagnostykę przy użyciu sterownika PLC lub komputera.
6.1 Konfiguracja
systemu
6.1.1 Komunikacja
RS422
W jednej sieci mogą pracować maksymalnie 32 serwowzmacniacze (numery stacji 0 do 31).
Schemat połączeń
a
Maksymalna łączna długość kabla w środowisku z niskim poziomem zakłóceń: 30 m przy
połączeniu 32 osi. Przy mniejszej ilości stacji możliwe jest uzyskanie większej odległości.
b
Na ostatnim serwowzmacniaczu należy zewrzeć zaciski TRE i RDN.
UWAGA
Jednoczesna komunikacja w obydwu standardach: RS232C i RS422 nie jest możliwa.
Używany standard komunikacji należy wybrać przy użyciu parametru Pr. 16.
S000885C
Rys. 6-1: Konfiguracja systemu dla komunikacji przez złącze RS422
S000886C
Rys. 6-2: Schemat połączeń sieci komunikacyjnej RS422
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
L1
U
L2
V
L3
W
~~
CN3
CN3
CN3
RS422
Komputer (np. PC)
Konwerter
RS232C/
RS422
Serwowzmacniacz
Oś 1 (Stacja 0)
Oś 2 (Stacja 1)
Oś 32 (Stacja 31)
Serwowzmacniacz
Serwowzmacniacz
SD
SD
SD
SDP
SDP
SDP
SDN
SDN
SDN
RDP
RDP
RDP
RDN
RDN
RDN
TRE
TRE
TRE
LG
9
19
5
15
10
11
1
9
19
5
15
10
11
1
9
19
5
15
10
11
1
LG
LG
LG
LG
LG
RDP
RDN
SDP
SDN
GND
GND
30m max.
Obud.
Komputer
Serwowzmac-
niacz
Oś 1
Serwowzmacniac
niacz
Oś 2
Serwowzmac-
niacz
Oś 32
(ostatnia oś)
Obud.
Obud.
b
a
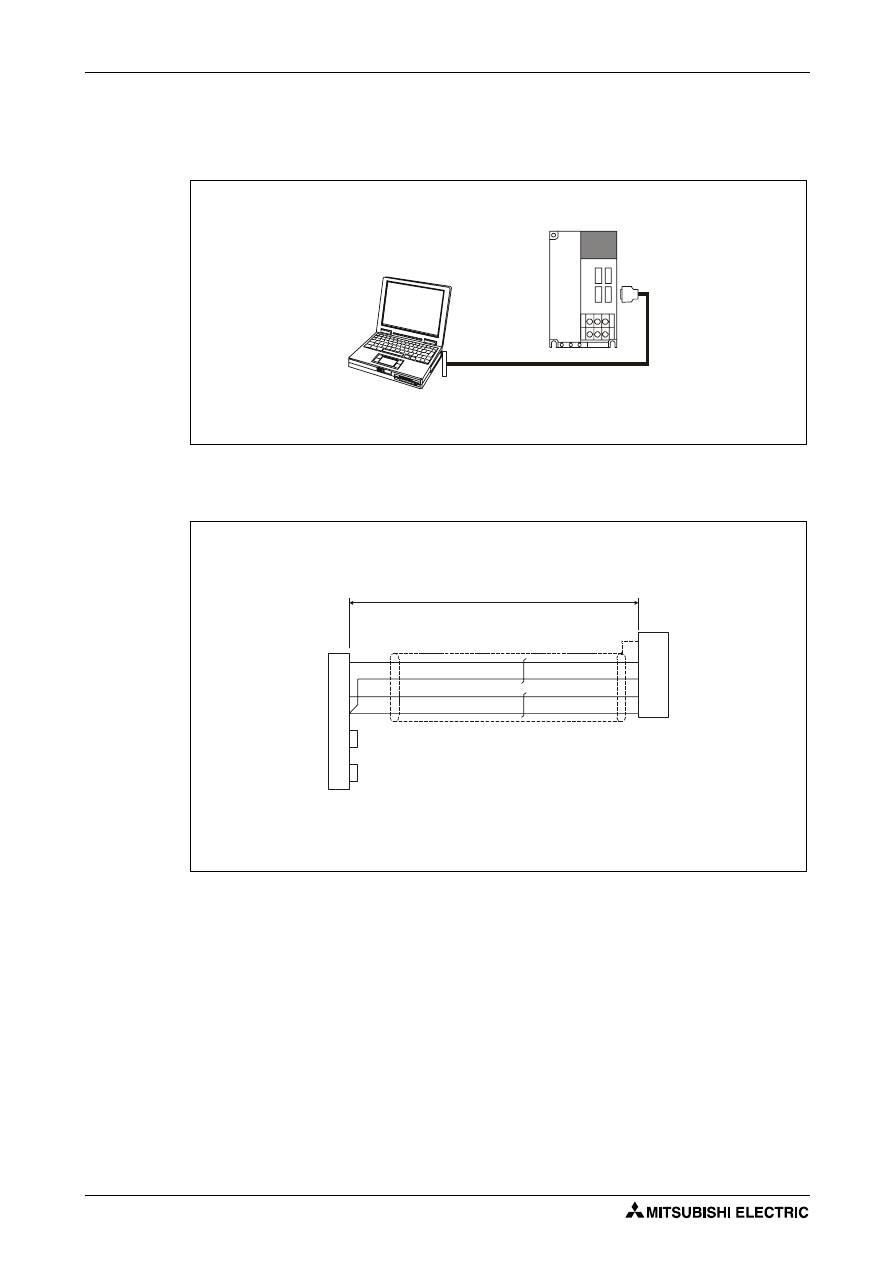
Komunikacja
Konfiguracja systemu
6 - 2
6.1.2 Komunikacja
RS232C
Złącze RS232C umożliwia połączenie jednego serwowzmacniacza z jednym komputerem.
Schemat połączeń
a
Maksymalna długość kabla w otoczeniu z niskim poziomem zakłóceń wynosi 15 m
Dla prędkości komunikacji 38400 Bit/s maksymalna długość kabla wynosi 3 m.
S000750C
Rys. 6-3: Konfiguracja systemu dla komunikacji przez złącze RS232C
S000888C
Rys. 6-4: Schemat połączeniowy dla komunikacji przez złącze RS232C
RS232C
Komputer (np. PC)
Serwowzmacniacz
CN3
TXD
TXD
3
RXD
RXD
FG
2
2
GDN
GDN
GDN
5
1
RTS
7
12
CTS
8
11
DSR
6
DTR
4
Obud.
Złacze PC
Wtyk D-SUB9
max. 15 m
a
Serwowzmacniacz
Złącze CN3
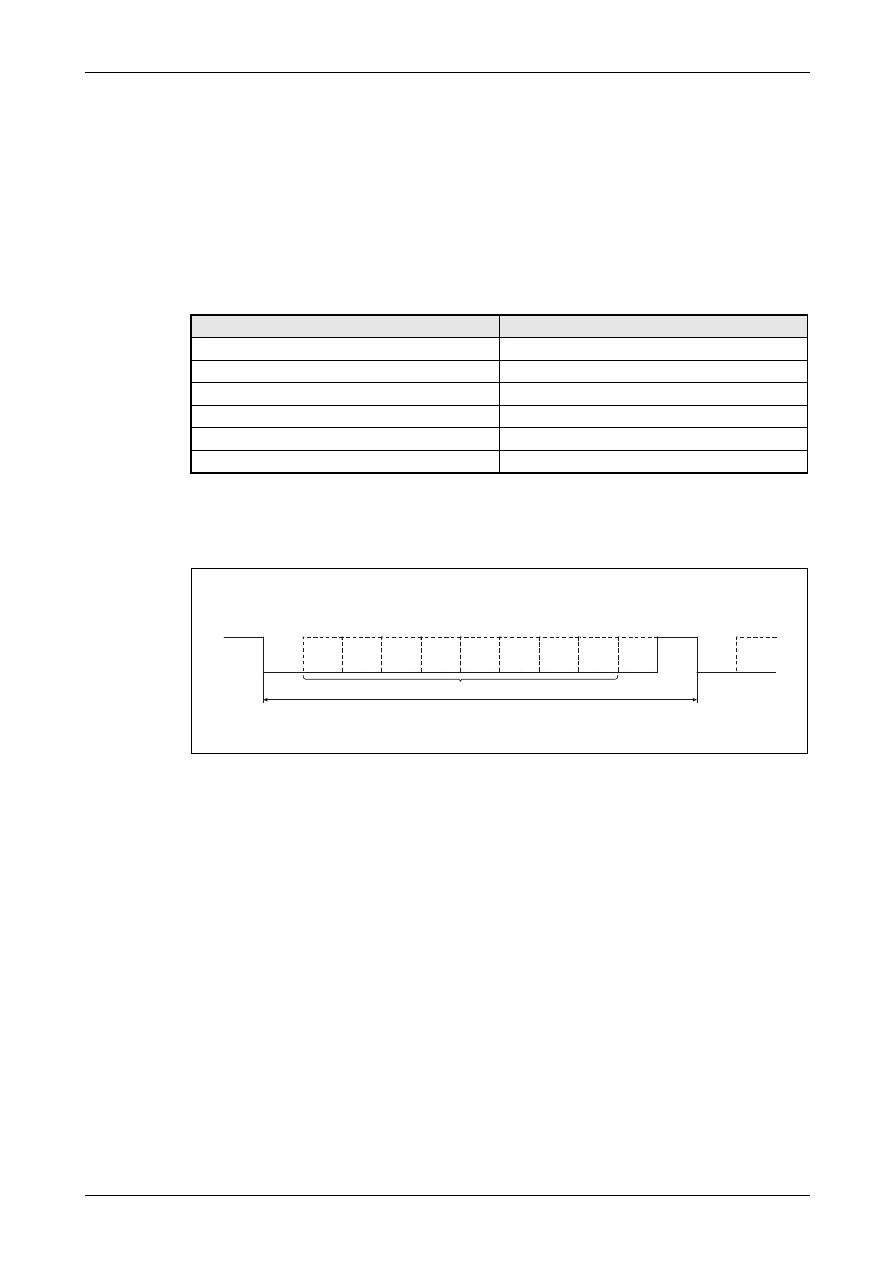
Parametry komunikacji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 3
6.2 Parametry
komunikacji
Serwowzmacniacz serii MELSERVO-J2Super ma możliwość odbierania poleceń oraz
wysyłania w odpowiedzi na nie stosownych danych. Urządzenie nadrzędne, które inicjuje ko-
munikację, wysyła polecenia i odbiera wysyłane w odpowiedzi dane (może to być np. sterownik
PLC lub komputer PC), zwane jest stacją Master. Urządzenie podrzędne (w tym przypadku jest
nim serwowzmacniacz), zwane stacją Slave, po otrzymaniu polecenia komunikacji odbiera,
przetwarza i wykonuje odebrane instrukcje oraz - wyłącznie w odpowiedzi na otrzymane polece-
nie - wysyła dane zwrotne.
W poniższej tabeli zebrano ustawienia komunilkacyjne.
Parametr komunikacji
Wartość
Prędkość komunikacji
9600/19200/38400/57600 asynchronicznie
Ilość bitów startu
1
Ilość bitów danych
8
Parzystość
1 (parzyste)
Ilość bitów stopu
1
Protokół komunikacji
Half-duplex
Tab. 6-1: Parametry komunikacji
Rys. 6-5: Struktura ramki danych
Start
0
(LSB)
(MSB)
1
2
3
4
5
6
7
Stop
Bit parzy-
stości
Dane
1 ramka danych (11 bitów)
następny
start
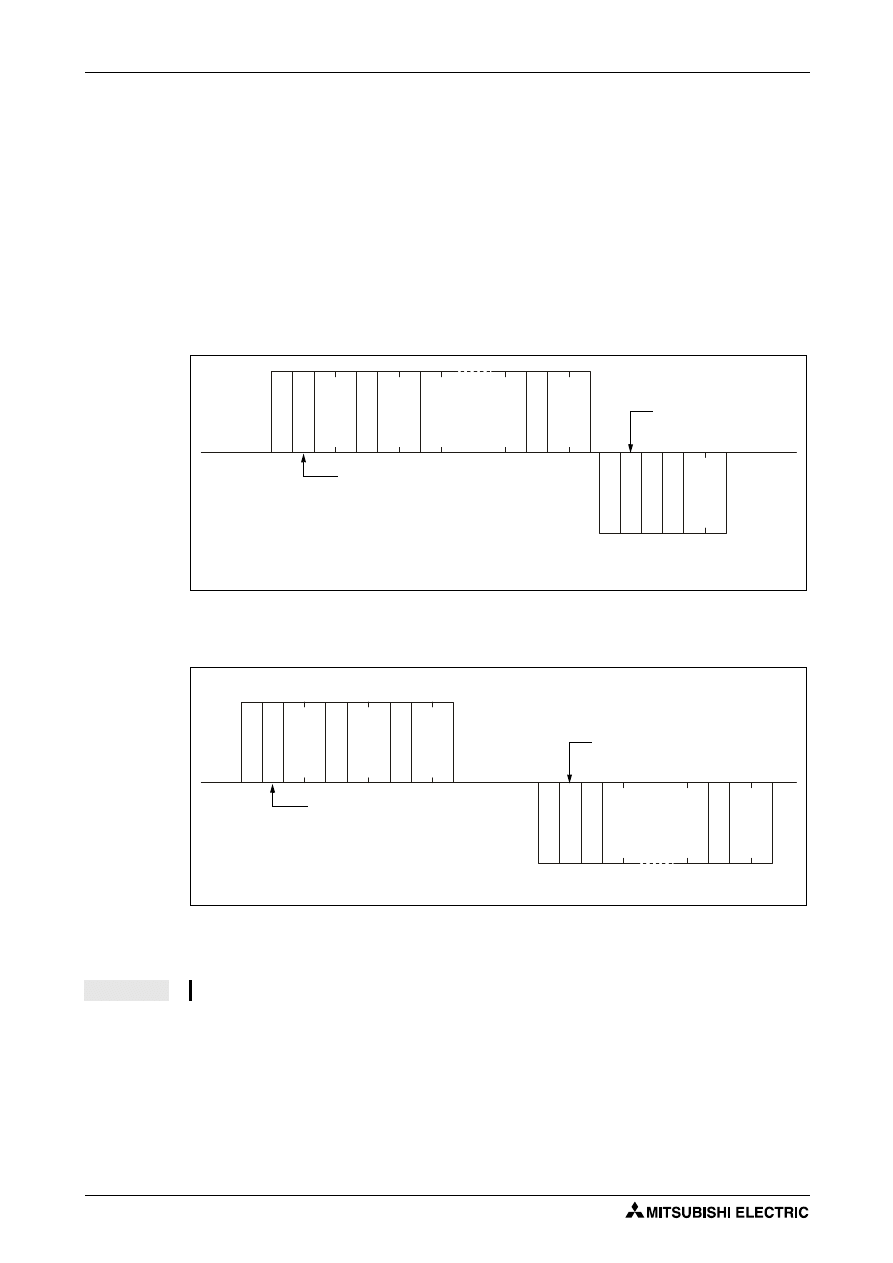
Komunikacja
Protokół komunikacji
6 - 4
6.3 Protokół komunikacji
Jeżeli w sieci połączona jest większa ilość serwowzmacniaczy, konieczne jest określenie w
wysyłanym komunikacie numeru stacji przypisanego serwowzmacniaczowi, dla którego komu-
nikat jest przeznaczony. Numer stacji przypisuje się podczas parametryzacji serwowzmacnia-
cza. Komunikaty są przesyłane tylko do określonego serwowzmacniacza lub grupy.
Jeżeli zamiast numeru stacji w wysyłanym komunikacie znajduje się gwiazdka (znak "*"), ko-
munikat zostanie wysłany do wszystkich podłączonych serwowzmacniaczy. Jeżeli jednak na
wysyłany komunikat wymagana jest odpowiedź, odpowie tylko serwowzmacniacz o numerze
stacji 0 (pierwsza oś).
Transmisja danych: Komputer
→
Serwowzmacniacz
Przesyłanie żądania komunikacji: Komputer
→
Serwowzmacniacz
S000753C
Rys. 6-6: Transmisja danych z komputera do serwowzmacniacza
S000754C
Rys. 6-7: Przesyłanie żądania komunikacji z komputera do serwowzmacniacza
UWAGA
* Ilość ramek danych w zależności od instrukcji może być równa: 4, 8, 12 lub 16.
Komputer
(Master)
Serwowz-
macniacz
(Slave)
S
O
H
E
T
X
S
T
X
S
T
X
E
T
X
Instrukcja
Kod
b
łę
du
Kod
danych
Dane *
Suma
kontr.
Suma
kontr.
Numer stacji
lub grupa
Numer stacji
lub grupa
10 ramek danych + (dane)
6 ramek danych
Odp. pozytywna: Kod błędu = A
Odp. negatywna: Kod błędu
≠ A
Komputer
(Master)
Serwowz-
macniacz
(Slave)
S
O
H
E
T
X
S
T
X
S
T
X
E
T
X
Instr
ukcj
a
Kod b
łę
du
Kod
danych
Suma
kontr.
Suma
kontr.
Numer stacji
lub grupa
Numer stacji
lub grupa
6 ramek danych + (dane)
10 ramek danych
Dane *
Protokół komunikacji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 5
Użycie sygnału time-out do przywrócenia stanu komunikacji
S000755C
Rys. 6-8: Przywrócenie stanu komunikacji sygnałem time-out
Komputer
(Master)
Serwowz-
macniacz
(Slave)
E
O
T
Sygnał EOT powoduje powrót serwowzmacniacza do
stanu oczekiwania na odbiór
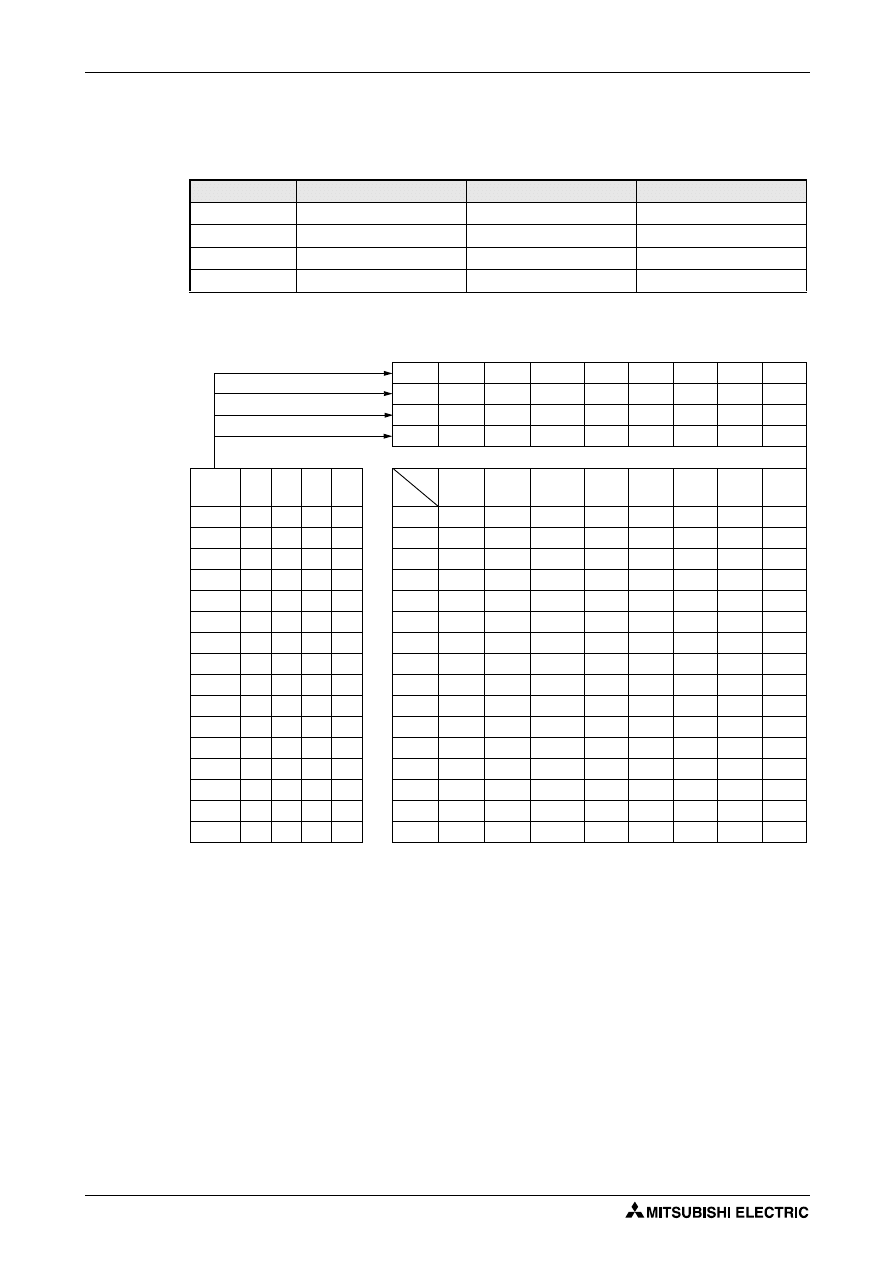
Komunikacja
Kody znaków
6 - 6
6.4 Kody
znaków
Kody sterujące
Kody danych (używane są kody ASCII)
Kod
Hex (Kod ASCII)
Opis
Kombinacja klawiszy
SOH
01h
Początek nagłówka
Ctrl + A
STX
02h
Początek tekstu
Ctrl + B
ETX
03h
Koniec tekstu
Ctrl + C
EOT
04h
Koniec transmisji
Ctrl + D
Tab. 6-2: Kody sterujące
b
8
0
0
0
0
0
0
0
0
b
7
0
0
0
0
1
1
1
1
b
6
0
0
1
1
0
0
1
1
b
5
0
1
0
1
0
1
0
1
b
8
–b
5
b
4
b
3
b
2
b
1
C
R
0
1
2
3
4
5
6
7
0
0
0
0
0
NUL
DLE
Spacja
0
@
P
`
p
0
0
0
1
1
SOH
DC
1
!
1
A
Q
a
q
0
0
1
0
2
STX
DC
2
“
2
B
R
b
r
0
0
1
1
3
ETX
DC
3
#
3
C
S
c
s
0
1
0
0
4
EOT
$
4
D
T
d
t
0
1
0
1
5
%
5
E
U
e
u
0
1
1
0
6
&
6
F
V
f
v
0
1
1
1
7
’
7
G
W
g
w
1
0
0
0
8
(
8
H
X
h
x
1
0
0
1
9
)
9
I
Y
i
y
1
0
1
0
10
*
:
J
Z
j
z
1
0
1
1
11
+
;
K
[
k
{
1
1
0
0
12
,
<
L
Ą
l
|
1
1
0
1
13
-
=
M
]
m
}
1
1
1
0
14
.
>
N
^
n
~
1
1
1
1
15
/
?
O
_
o
DEL
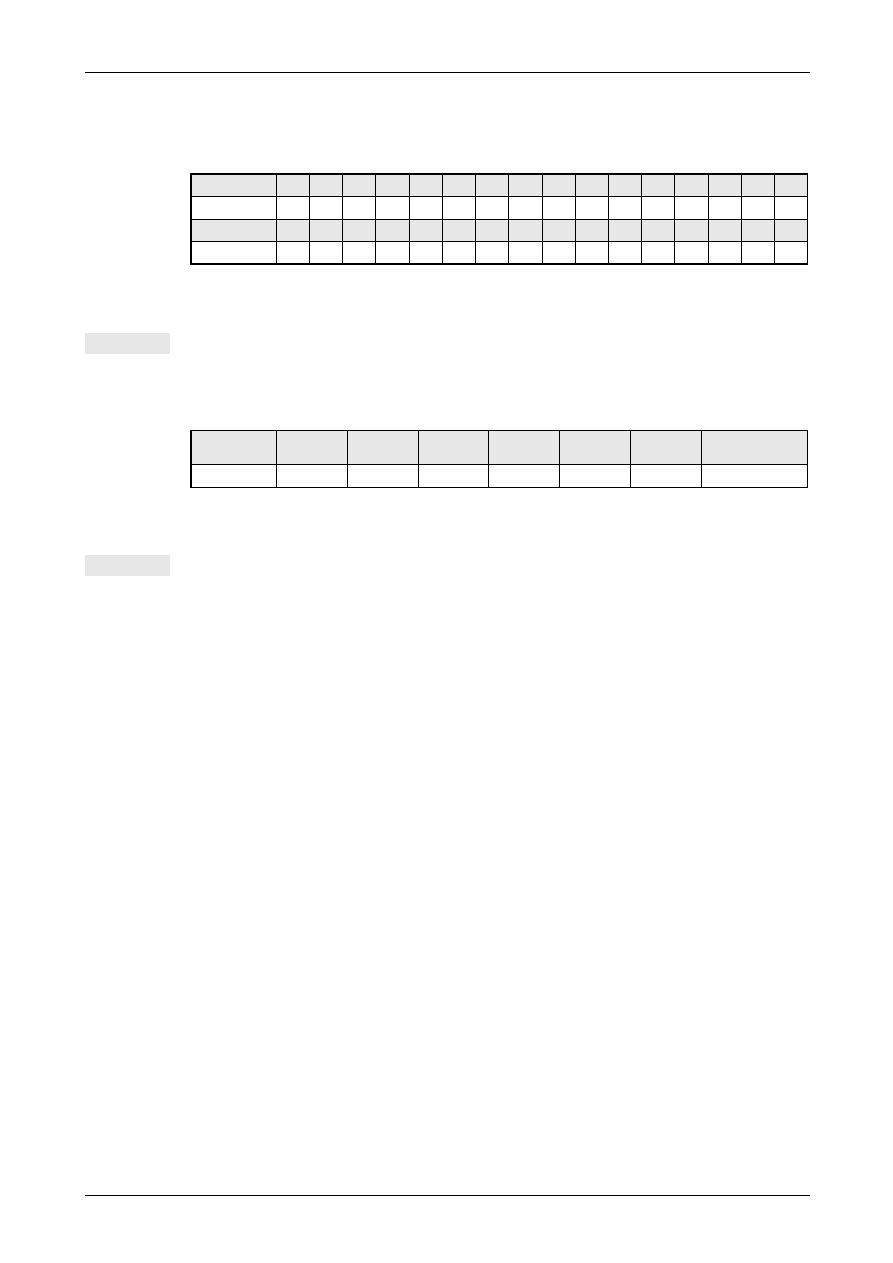
Kody znaków
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 7
Numery stacji
Możliwe jest nadanie 32 numerów stacji (stacja 0–31). W poniższej tabeli przedstawiono przy-
porządkowanie kodów ASCII do numerów stacji:
Grupy
Stacja
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Kod ASCII
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
Stacja
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
Kod ASCII
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
Tab. 6-3: Przyporządkowanie kodów ASCII do numerów stacji
PRZYKŁAD
Dla numeru stacji „0“ przesyłany jest szesnastkowy kod znaku ASCII „0", tj. „30h“.
Grupa
a
b
c
d
e
f
Wszystkie
grupy
Kod ASCII
a
b
c
d
e
f
*
Tab. 6-4: Przyporządkowanie kodów ASCII do symboli grup
PRZYKŁAD
Dla grupy „a“ przesyłany jest szesnastkowy kod znaku ASCII „a", tj. „61h“.
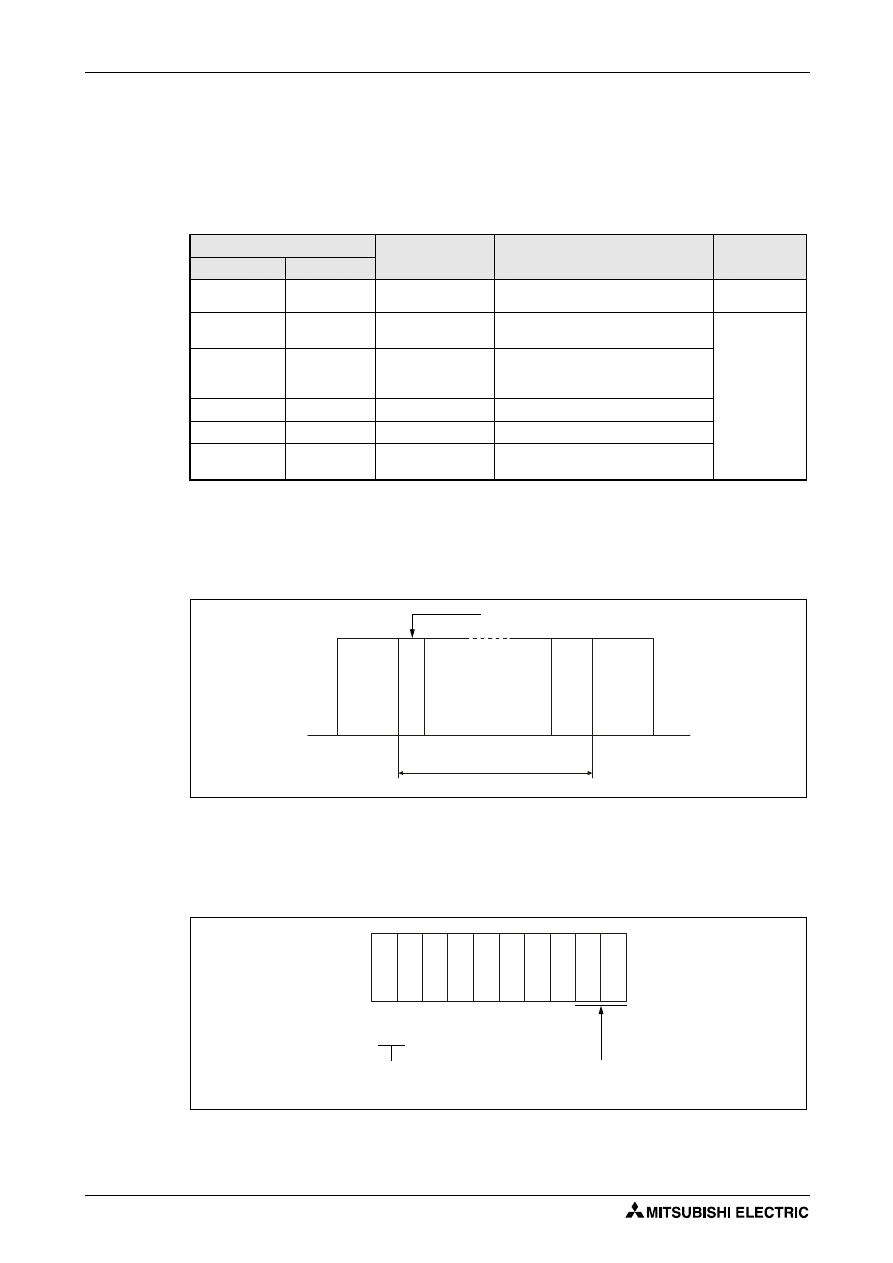
Komunikacja
Kody znaków
6 - 8
6.4.1 Kody
błędów
W przypadku, gdy komunikat odebrany przez serwowzmacniacz zawiera błąd, do stacji Master
zostanie odesłany odpowiedni komunikat błędu.
Kod błędu wyrażony jest dużą literą, gdy serwowzmacniacz jest w trybie normalnej pracy lub tą
samą, ale małą literą gdy serwowzmacniacz znajduje się w stanie alarmu.
6.4.2 Błąd sumy kontrolnej
Suma kontrolna jest zakodowaną w ASCII liczbą szesnastkową, odpowiadającą dwu niższym
bitom sumy kodów ASCII znaków do ETX włącznie, z wyłączeniem pierwszego kodu sterują-
cego (STX lub SOH).
Kod błędu
Nazwa
Opis
Uwagi
Servo normal
Servo Alarm
[A]
[a]
Normalna praca
Odebrano dane bez błędu
Odpowiedź
pozytywna
[B]
[b]
Błąd parzystości
Kod parzystości jest niezgodny z ode-
branymi danymi.
Odpowiedź
negatywna
[C]
[c]
Błąd sumy kontrol-
nej
Kod sumy kontrolnej przesłany ze stacji
Master jest niezgodny z odebranymi
przez serwowzmacniacz danymi
[D]
[d]
Błąd znaku
Odebrano nieznany znak
[E]
[e]
Błąd instrukcji
Odebrano nieznaną instrukcję
[F]
[f]
Błąd zakresu
danych
Odebrana wartość danych znajduje się
poza dopuszczalnym zakresem
Tab. 6-5: Kody błędów
S000756C
Rys. 6-9: Obszar, kontrolowany przez sumę kontrolną
S000757C
Rys. 6-10: Kod sumy kontrolnej (przyklad)
Obszar sumowania
Kod sumy
kontrolnej
Numer stacji lub grupy
STX
lub
SOH
ETX
S
T
X
[0]
02h 30h 41h 31h 32h 35h 46h 03h
[A] [1] [2] [5] [F]
[5] [2]
E
T
X
30h + 41h + 31h + 32h + 35h + 46h + 03h
= 152h
Przesyłane są dwa niższe znaki 52 po konwersji do kodu
ASCII [5][2].
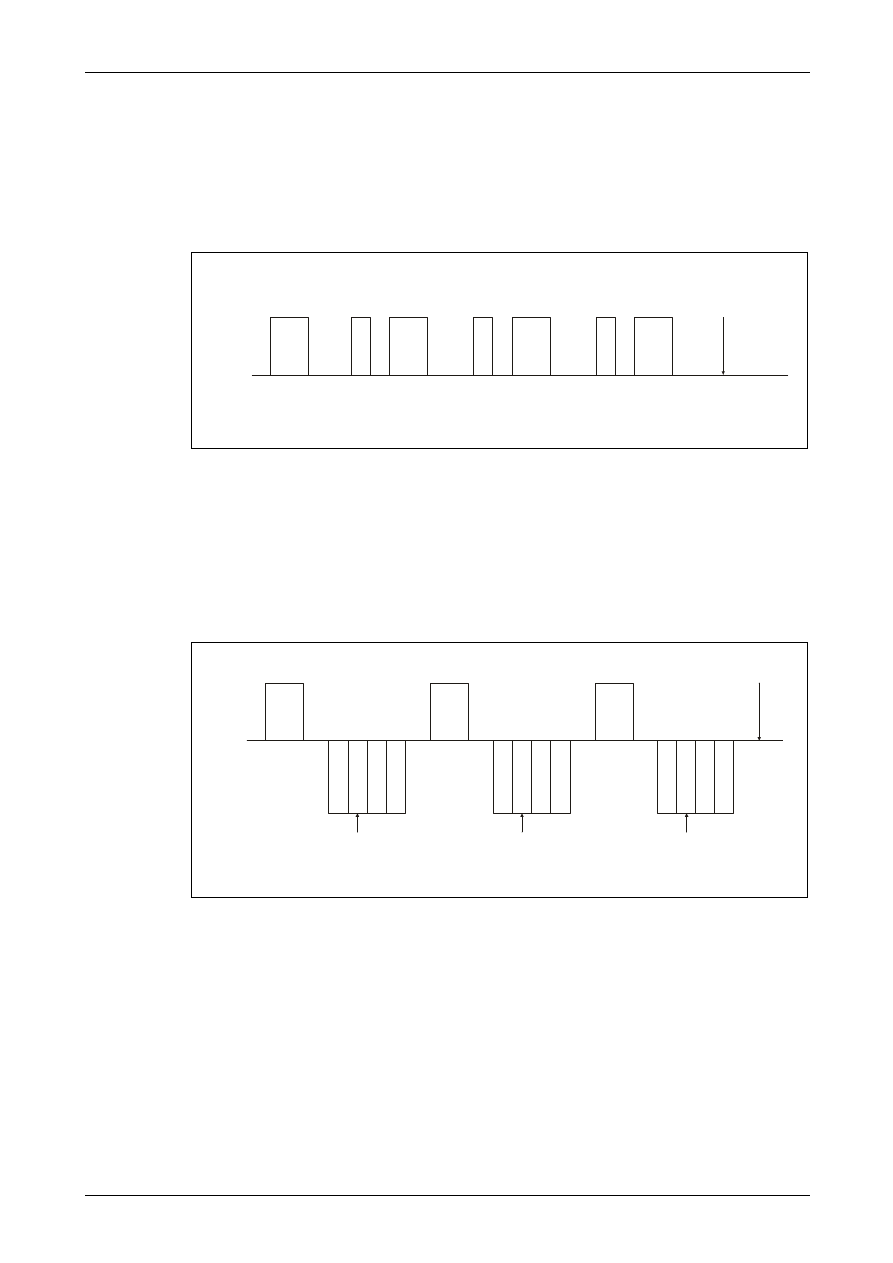
Kody znaków
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 9
6.4.3 Time-out
Jeżeli stacja Master nie otrzyma od stacji Slave odpowiedzi (kodu STX) w ciągu 300 ms po za-
kończeniu wysyłania komunikatu, wysyła kod EOT. Po następnych 100 ms stacja Master
powtórnie wysyła poprzedni komunikat. Po trzykrotnym, bezskutecznym powtórzeniu
powyższej operacji zostaje stwierdzone przekroczenie czasu komunikacji (time-out) i wydany
komunikat błędu komunikacji.
6.4.4 Wznowienie
komunikacji
W przypadku, gdy przesłany komunikat zostanie odebrany z błędem, serwowzmacniacz odsyła
do stacji Master odpowiedź negatywną z kodem błędu ([B] do [F] lub [b] do [f]). Po trzech kole-
jnych, bezskutecznych wznowieniach komunikacji zostanie zgłoszony błąd komunikacji.
Podobnie, gdy stacja Master stwierdza błąd w komunikacie z serwowzmacniacza (Suma kon-
trolna, parzystość itd.) ponownie przesyła komunikat, w odpowiedzi na ktory wystąpił błąd. Błąd
komunikacji zostanie zgłoszony po trzykrotnym bezskutecznym wznowieniu komunikacji.
S000758C
Rys. 6-11: Przekroczenie czasu komunikacji (time-out)
S000759C
Rys. 6-12: Próby komunikacji
300ms
300ms
300ms
300ms
100ms
100ms
100ms
Komputer
(Master)
Serwowz-
macniacz
(Slave)
E
O
T
Komunikat
Komunikat
Komunikat
Komunikat
E
O
T
E
O
T
Time-out
Komputer
(Master)
Serwowz-
macniacz
(Slave)
Komunika
t
Komunika
t
Komunika
t
S
T
X
S
T
X
S
T
X
Numer stacji
lub
grupa
Numer stacji
lub
grupa
Numer stacji
lub
grupa
Błąd komunikacji
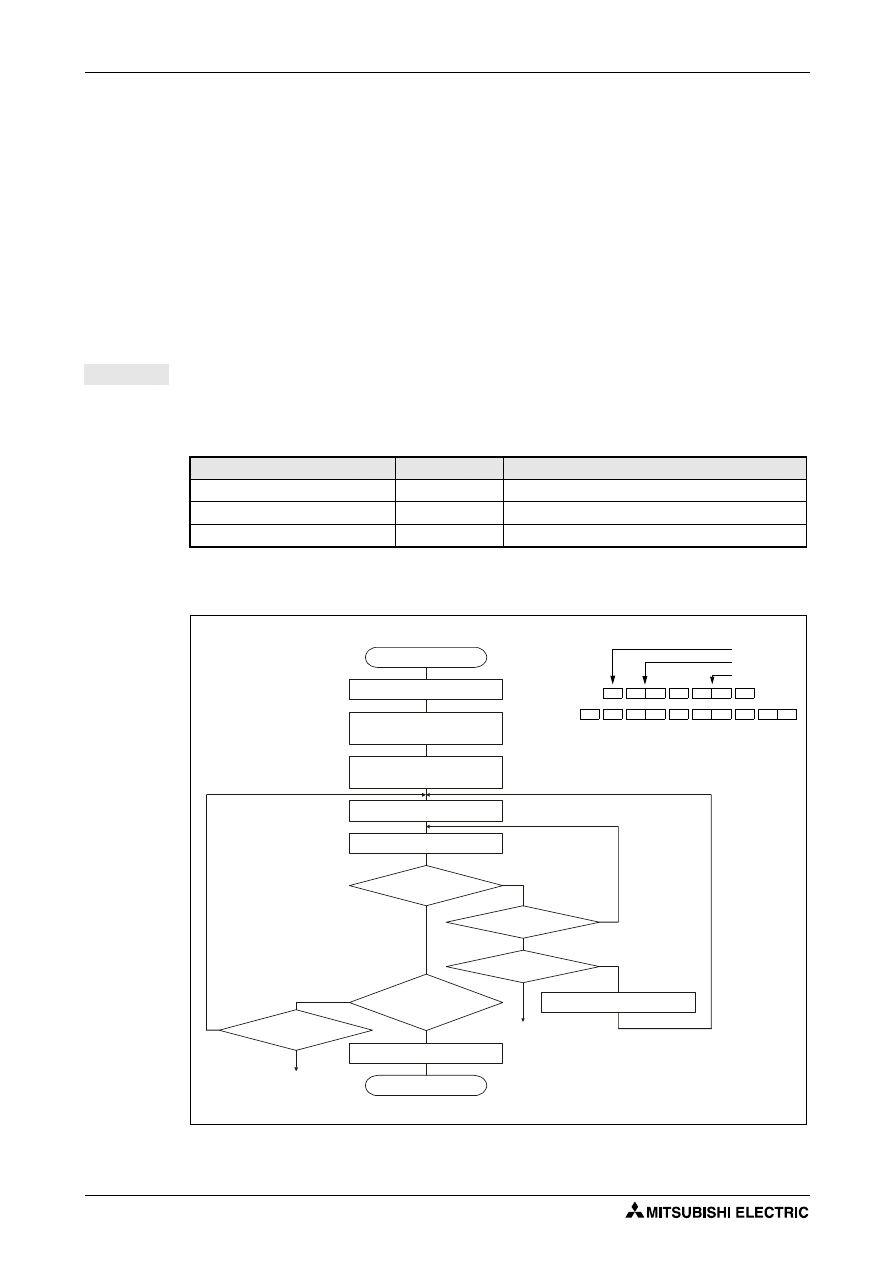
Komunikacja
Kody znaków
6 - 10
6.4.5 Inicjalizacja
Po załączeniu zasilania serwowzmacniacza komunikacja ze stacją Master staje się możliwa
dopiero po zakończeniu procesu jego inicjalizacji. Stąd dla rozpoczęcia komunikacji konieczne
jest::
●
Od załączenia zasilania serwowzmacniacza musi upłynąć co najmniej 1 s
●
Należy upewnić się, że komunikacja przebiega prawidłowo poprzez odczyt wartości
parametru lub innych danych, odczyt których nie stwarza zagrożenia.
6.4.6 Przykład komunikacji
PRZYKŁAD
W poniższym przykładzie wykonywany jest odczyt parametru Pr. 2 „Wybór funkcji 1“ z ser-
wowzmacniacza o nr stacji 0.
Dane
Wartość
Opis
Numer stacji
0
Serwowzmacniacz Stacja 0
Polecenie
05
Odczyt
Kod danych
02
Parametr Pr. 2
Tab. 6-6: Przykład danych
S000760C
Rys. 6-13: Algorytm procesu komunikacji
Start
Wprowadzenie danych
Obliczenie sumy kontrolnej
Dodanie SOH i zestawienie
komunikatu
Transmisja danych
Odbiór danych
Dane
odebrano?
Komunikat inny niż
kod błędu [A] lub [a]?
Analiza odebranych danych
KONIEC
3 próby?
300 ms minęło?
3 próby?
100 ms po transmisji EOT
Błąd komunikacji
Błąd komunikacji
Tak
Tak
Tak
Tak
Nie
Tak
Nie
Nie
Nie
Nie
Master
→
Slave
Master
→
Slave
Master
←
Slave
Nr stacji
Instrukcja
Kod danych
Dane:
0
0
5
STX
0
2
ETX
Suma kontrolna:
30h
+30h +35h +02h +30h +32h +03h =FCh
Dane do przesłania: SOH
0
0
5
STX
0
2
ETX
F
C
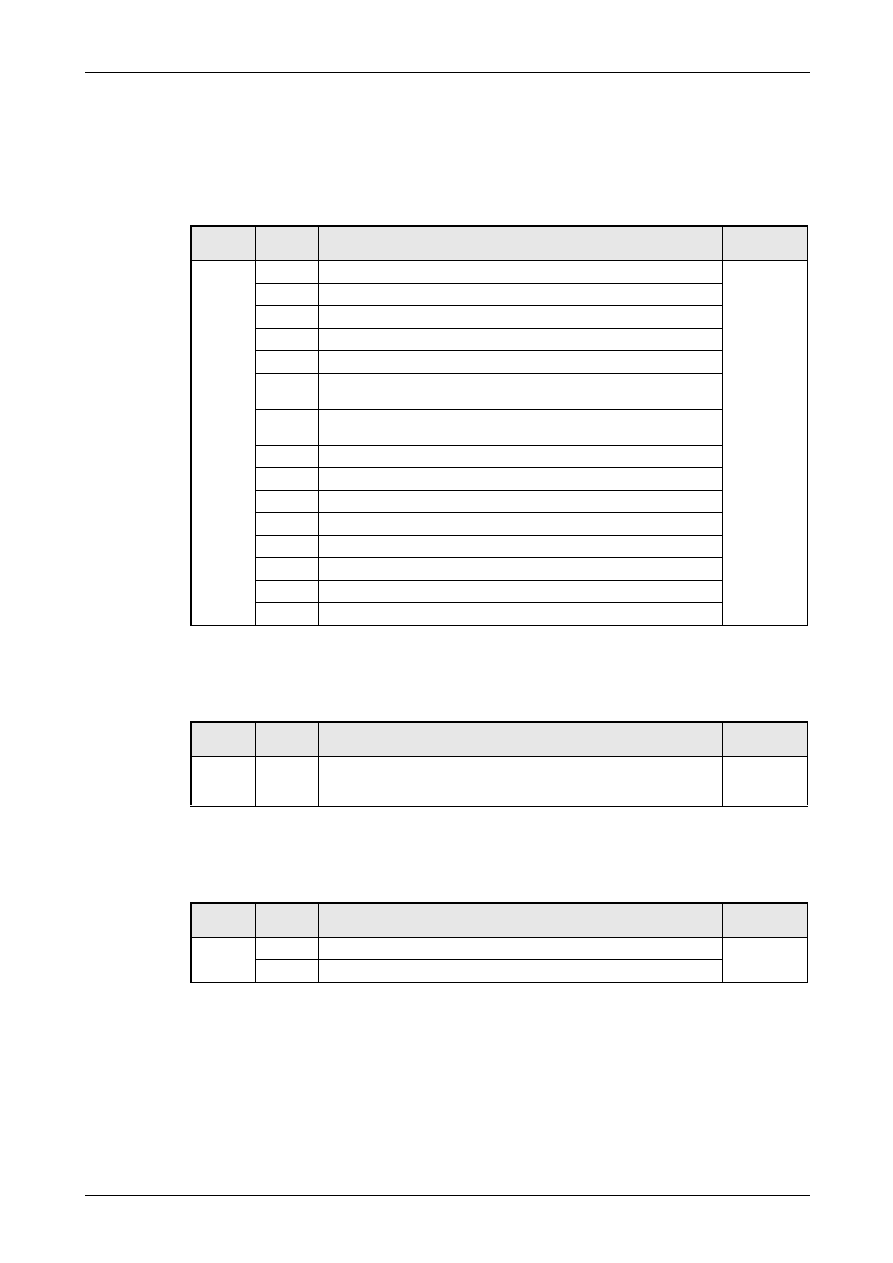
Lista poleceń i kodów danych
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 11
6.5 Lista
poleceń i kodów danych
6.5.1 Polecenia
odczytu
Wyświetlenie komunikatu stanu (instrukcja [0][1])
Odczyt wartości parametru (instrukcja [0][5])
Sygnały wejściowe i wyjściowe (instrukcja [1][2])
Instru-
kcja
Kod
danych
Wyświetlana wartość
Ilość ramek
[0][1]
[8][0]
Impulsy sprzężenia zwrotnego
12 ramek
[8][1]
Prędkość serwosilnika
[8][2]
Uchyb (w impulsach)
[8][3]
Impulsy zadające
[8][4]
Częstotliwość ciągu impulsów
[8][5]
Napięcie analogowego zadawania prędkości
Napięcie analogowego ograniczenia prędkości
[8][6]
Napięcie analogowego zadawania momentu
Napięcie analogowego ograniczenia momentu
[8][7]
Współczynnik obciążenia opornika hamującego
[8][8]
Wartość skuteczna momentu obrotowego
[8][9]
Wartość szczytowa momentu obrotowego
[8][A]
Wartość chwilowa momentu obrotowego
[8][B]
Pozycja absolutna w ramach jednego obrotu
[8][C]
Licznik obrotów pozycji absolutnej
[8][D]
Współczynnik momentu bezwładności obciążenia
[8][E]
Napięcie w stopniu pośrednim DC
Tab. 6-7: Wyświetlenie komunikatu stanu - kod instrukcji i kody danych
Instru-
kcja
Kod
danych
Wyświetlana wartość
Ilość ramek
[0][5]
[0][0]
do
[5][4]
Aktualna wartość parametru
(Wartość dziesiętna szesnastkowego kodu danych jest równa numerowi
parametru)
8 ramek
Tab. 6-8: Odczyt parametru - kod instrukcji i kody danych
Instru-
kcja
Kod
danych
Wyświetlana wartość
Ilość ramek
[1][2]
[4][0]
Stan sygnałów wejściowych
8 ramek
[C][0]
Stan sygnałów wyjściowych
Tab. 6-9: Odczyt sygnałów I/O - kod instrukcji i kody danych
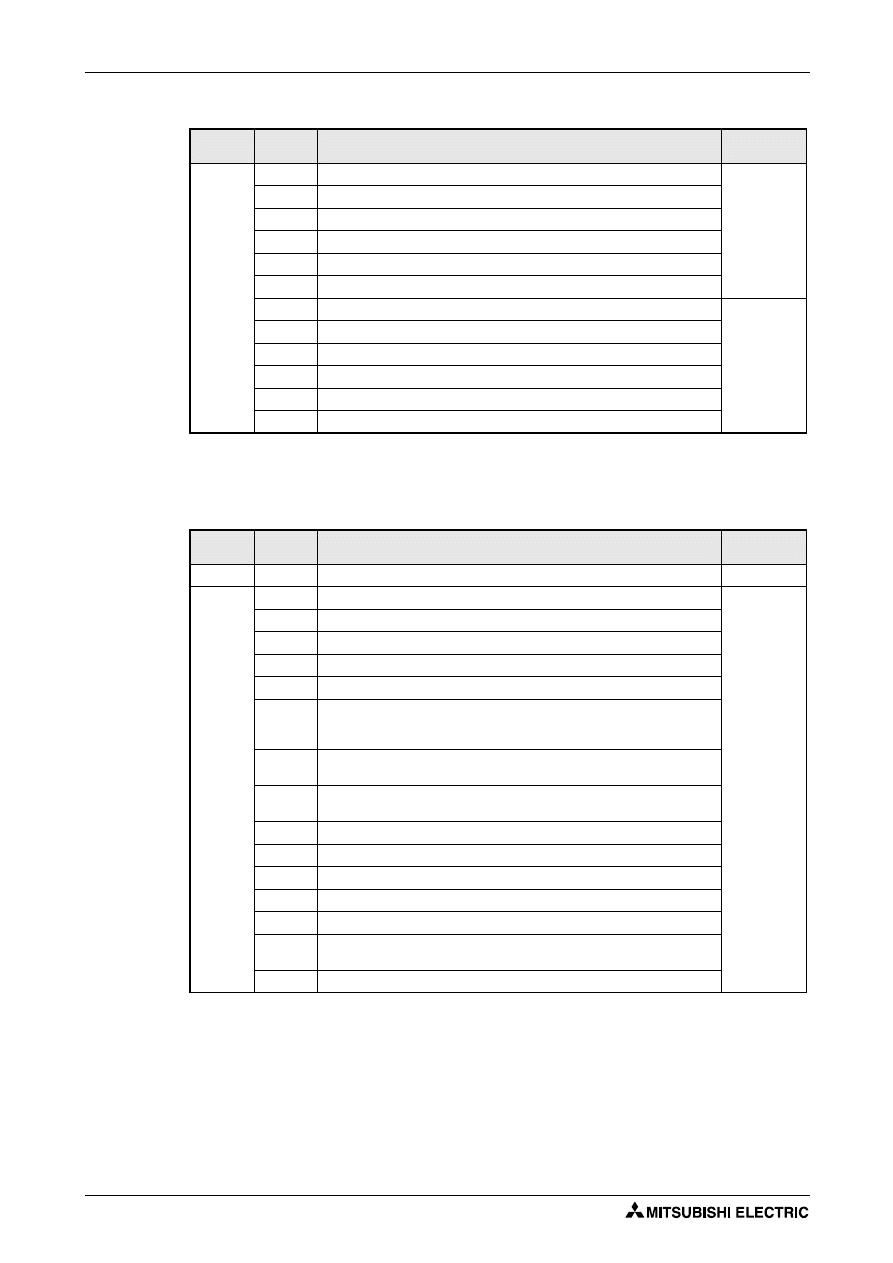
Komunikacja
Lista poleceń i kodów danych
6 - 12
Historia alarmów (instrukcja [3][3])
Bieżący alarm (instrukcja [0][2] i [3][5])
Instru-
kcja
Kod
danych
Opis
Ilość ramek
[3][3]
[1][0]
Numer alarmu (bieżący alarm)
4 ramki
[1][1]
Numer alarmu (poprzedni alarm)
[1][2]
Numer alarmu (przedostatni alarm)
[1][3]
Numer alarmu (trzeci w historii alarm)
[1][4]
Numer alarmu (czwarty w historii alarm)
[1][5]
Numer alarmu (piąty w historii alarm)
[2][0]
Czas wystąpienia (bieżący alarm)
8 ramek
[2][1]
Czas wystąpienia (poprzedni alarm)
[2][2]
Czas wystąpienia (przedostatni alarm)
[2][3]
Czas wystąpienia (trzeci w historii alarm)
[2][4]
Czas wystąpienia (czwarty w historii alarm)
[2][5]
Czas wystąpienia (piąty w historii alarm)
Tab. 6-10: Odczyt historii alarmów - instrukcja i kody danych
Instru-
kcja
Kod
danych
Opis
Ilość ramek
[0][2]
[0][0]
Numer bieżącego alarmu
4 ramki
[3][5]
[8][0]
Impulsy sprzężenia zwrotnego w chwili wystąpienia alarmu
12 ramek
[8][1]
Prędkość serwosilnika w chwili wystąpienia alarmu
[8][2]
Uchyb (w impulsach) w chwili wystąpienia alarmu
[8][3]
Impulsy zadające w chwili wystąpienia alarmu
[8][4]
Częstotliwość ciągu impulsów chwili wystąpienia alarmu
[8][5]
Napięcie analogowego zadawania prędkości w chwili wystąpienia alarmu
Napięcie analogowego ograniczenia prędkości w chwili wystąpienia
alarmu
[8][6]
Napięcie analogowego zadawania momentu w chwili wystąpienia alarmu
Napięcie analogowego ograniczenia momentu w chwili wystąpienia alarmu
[8][7]
Współczynnik obciążenia opornika hamującego w chwili wystąpienia
alarmu
[8][8]
Wartość skuteczna momentu obrotowego w chwili wystąpienia alarmu
[8][9]
Wartość szczytowa momentu obrotowego w chwili wystąpienia alarmu
[8][A]
Wartość chwilowa momentu obrotowego w chwili wystąpienia alarmu
[8][B]
Położenie w ramach jednego obrotu w chwili wystąpienia alarmu
[8][C]
Licznik obrotów pozycji absolutnej w chwili wystąpienia alarmu
[8][D]
Współczynnik momentu bezwładności obciążenia w chwili wystąpienia
alarmu
[8][E]
Napięcie w stopniu pośrednim DC w chwili wystąpienia alarmu
Tab. 6-11: Odczyt szczegółowych danych bieżącego alarmu - kody instrukcji i kody danych
Lista poleceń i kodów danych
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 13
Odczyt ustawień dla grupy (instrukcja [1][F])
Inne instrukcje
Instru-
kcja
Kod
danych
Opis
Ilość ramek
[1][F]
[0][0]
Odczyt ustawień dla grupy
4 ramki
Tab. 6-12: Odczyt ustawień dla grupy - kod instrukcji i kod danych
Instru-
kcja
Kod
danych
Opis
Ilość ramek
[0][2]
[9][0]
Wartość pozycji absolutnej wyrażona w impulsach enkodera
8 ramki
[9][1]
Wartość pozycji absolutnej wyrażona w impulsach zadających
[7][0]
Wersja oprogramowania
16 ramek
Tab. 6-13: Inne instrukcje
Komunikacja
Lista poleceń i kodów danych
6 - 14
6.5.2 Instrukcje
zapisu
Kasowanie komunikatu stanu (instrukcja [8][1])
Parametr (instrukcja [8][4])
Kasowanie historii alarmów (instrukcja [8][2])
Reset bieżącego alarmu (instrukcja [8][2])
Wybór trybu pracy (instrukcja [8][B])
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[8][1]
[0][0]
Zerowanie wyświetlanej ilości impulsów sprzężenia zwrot-
nego
1EA5
4 ramki
Tab. 6-14: Zapis polecenia kasowania komunikatu stanu - kod instrukcji i kod danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[8][4]
[0][0]
do
[5][4]
Wpisanie wartości podanego parametru
(Wartość dziesiętna szesnastkowego kodu danych jest
równa numerowi parametru)
zależnie od
parametru
8 ramek
Tab. 6-15: Zapis wartości parametru - kod instrukcji i kody danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[8][2]
[2][0]
Kasowanie historii alarmów
1EA5
4 ramki
Tab. 6-16: Kasowanie historii alarmów - kod instrukcji i kod danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[8][2]
[0][0]
Reset bieżącego alarmu
1EA5
4 ramki
Tab. 6-17: Reset bieżącego alarmu - kod instrukcji i kod danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[8][B]
[0][0]
Wybór trybu pracy:
0000: Wyjście z trybu operacji próbnych
0001: Operacje próbne: Tryb pracy krokowej (JOG)
0002: Operacje próbne: Pozycjonowanie
0003: Operacje próbne: Praca bez serwosilnika
0004: Operacje próbne: Wymuszanie sygnałów wyjścio-
wych
0000 do 0004
4 ramki
Tab. 6-18: Wybór trybu pracy - kod instrukcji i kody danych
Lista poleceń i kodów danych
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 15
Blokowanie zewnętrznych sygnałów wejściowych i wyjściowych (instrukcja [9][0]
Dane dla trybu operacji próbnych (instrukcja [9][2] i [A][0])
Ustawienia dla grupy (instrukcja [9][F])
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[9][0]
[0][0]
Zablokowanie (wyłączenie niezależnie od rzeczywistego
stanu sygnału) sygnałów wejściowych: dwustanowych
(DI), analogowych oraz ciągu impulsów. Nie dotyczy
sygnałów: EMG, LSP i LSN
1EA5
4 ramki
[0][3]
Przełączenie wyjściowych sygnałów dwustanowych (DO)
w stan określony instrukcją [8][B] lub [A][0] + kod danych
[0][1]
[1][0]
Zwolnienie blokady sygnałów wejściowych: dwustanowych
(DI), analogowych oraz ciągu impulsów. Nie dotyczy
sygnałów: EMG, LSP i LSN
[1][3]
Zwolnienie blokady wyjściowych sygnałów dwustanowych
(DO)
Tab. 6-19: Blokowanie zewnętrznych sygnałów wejściowych i wyjściowych - kody instrukcji i
kody danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[9][2]
[0][0]
Sygnał wejściowy dla operacji próbnych
8 ramek
[A][0]
Wymuszenie stanu wyjść
[A][0]
[1][0]
Zapis prędkości dla trybu operacji próbnych (praca
krokowa (JOG), pozycjonowanie)
0000 do 7FFF
4 ramki
[1][1]
Zapis czasu rozpędzania/hamowania dla trybu operacji
próbnych (praca krokowa (JOG), pozycjonowanie)
00000000 do
7FFFFFFF
8 ramek
[1][2]
Kasowanie czasu rozpędzania/hamowania dla trybu oper-
acji próbnych (praca krokowa (JOG), pozycjonowanie)
1EA5
4 ramki
[1][3]
Zapis wielkości przemieszczenia (w impulsach) dla trybu
operacji próbnych (pozycjonowanie)
FF676981 do
98967F
8 ramek
[1][5]
Polecenie tymczasowego zatrzymania dla trybu operacji
próbnych (praca krokowa (JOG), pozycjonowanie)
1EA5
4 ramki
Tab. 6-20: Operacje próbne - kody instrukcji i kody danych
Instru-
kcja
Kod
danych
Opis
Zakres wartości lość ramek
[9][F]
[0][0]
Zapis ustawień dla grupy
4 ramki
Tab. 6-21: Wpisanie ustawień dla grupy - kod instrukcji i kod danych
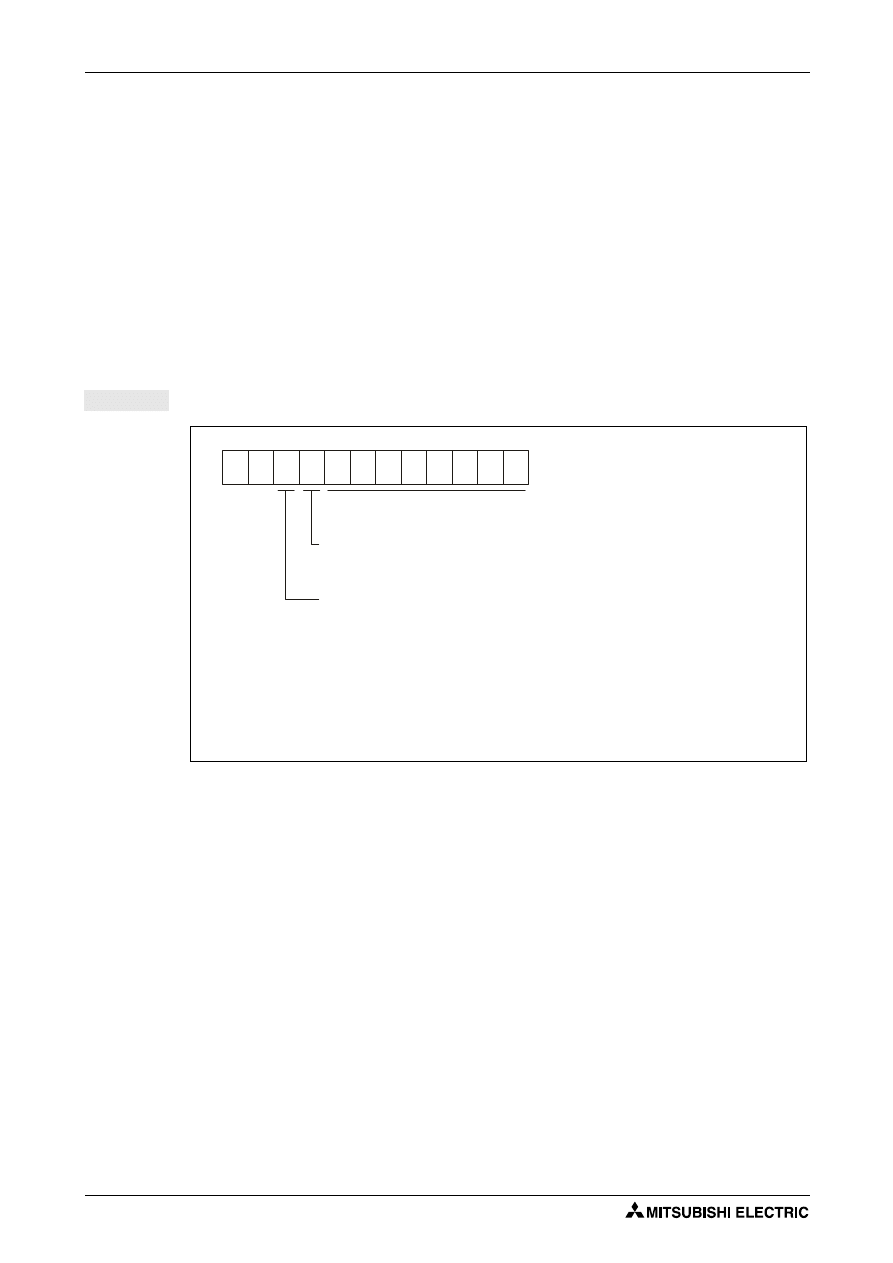
Komunikacja
Szczegółowy opis instrukcji
6 - 16
6.6 Szczegółowy opis instrukcji
6.6.1 Przetwarzanie
danych
Po odbiorze komunikatu ze stacji Master serwowzmacniacz w celu wykonania instrukcji lub
odesłania właściwej odpowiedzi musi wykonać przetwarzanie danych. Dane do przetwarzania
mogą być liczbami w postaci dziesiętnej lub szesnastkowej. Sposób przetwarzania zależy od
przesłanej instrukcji i przeznaczenia danych oraz od ustawień parametrów.
Poniżej objaśniono metody przetwarzania odczytanych i przesyłanych danych.
Przetwarzanie odebranych danych
Sposób przetwarzania odebranych danych zostanie wytłumaczony na przykładzie. Serwow-
zmacniacz odebrał ciąg cyfr: „003000000929“. Poniżej przedstawiono interpretację danych.
Przesyłane dane zawierają dwa specjalne znaki, określajace: tryb wyświetlania danych oraz
położenie przecinka dziesiętnego. Jeżeli tryb wyświetlania określony jest jako 0, osiem cyfr
danych traktowane jest jako liczba szesnastkowa i wykonywana jest jej konwersja do postaci
dziesiętnej, a przecinek dziesiętny umieszczany jest zgodnie z podaną lokalizacją. Jeżeli tryb
wyświetlania = "1", dane przyjmowane są bez zmian jako ośmiocyfrowa liczba szesnastkowa.
W naszym przykładzie odebrano ciąg: „003000000929“.
Ponieważ tryb wyświetlania = „0“ wykonywana jest konwersja liczby szesnastkowej do dziesięt-
nej, w wyniku której z wartości szesnastkowej 00000929h otrzymujemy liczbę dziesietna 2345.
Położenie przecinka dziesiętnego określono jako 3, tj. po trzecim najmniej znaczącym znaku,
wobec czego przecinek umieszczany jest na trzecim miejscu od końca i liczba będzie wyświet-
lona jako „23.45“.
PRZYKŁAD
S000887C
Rys. 6-14: Odebrane dane
0 0
0 0 0 0 0 0
3
9 2 9
Dane (32 Bit) (szesnastkowo)
(Dane wymagają konwersji lub nie, w zależności od znaku „Tryb wyświetlania")
Tryb wyświetlania
[0]: Konieczne przetwarzanie do postaci dziesiętnej
[1]: Dane pozostają w postaci szesnastkowej
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym najmniej znaczącym znaku (nie używane)
[2]: po drugim najmniej znaczącym znaku
[3]: po trzecim najmniej znaczącym znaku
[4]: po czwartym najmniej znaczącym znaku
[5]: po piątym najmniej znaczącym znaku
[6]: po szóstym najmniej znaczącym znaku
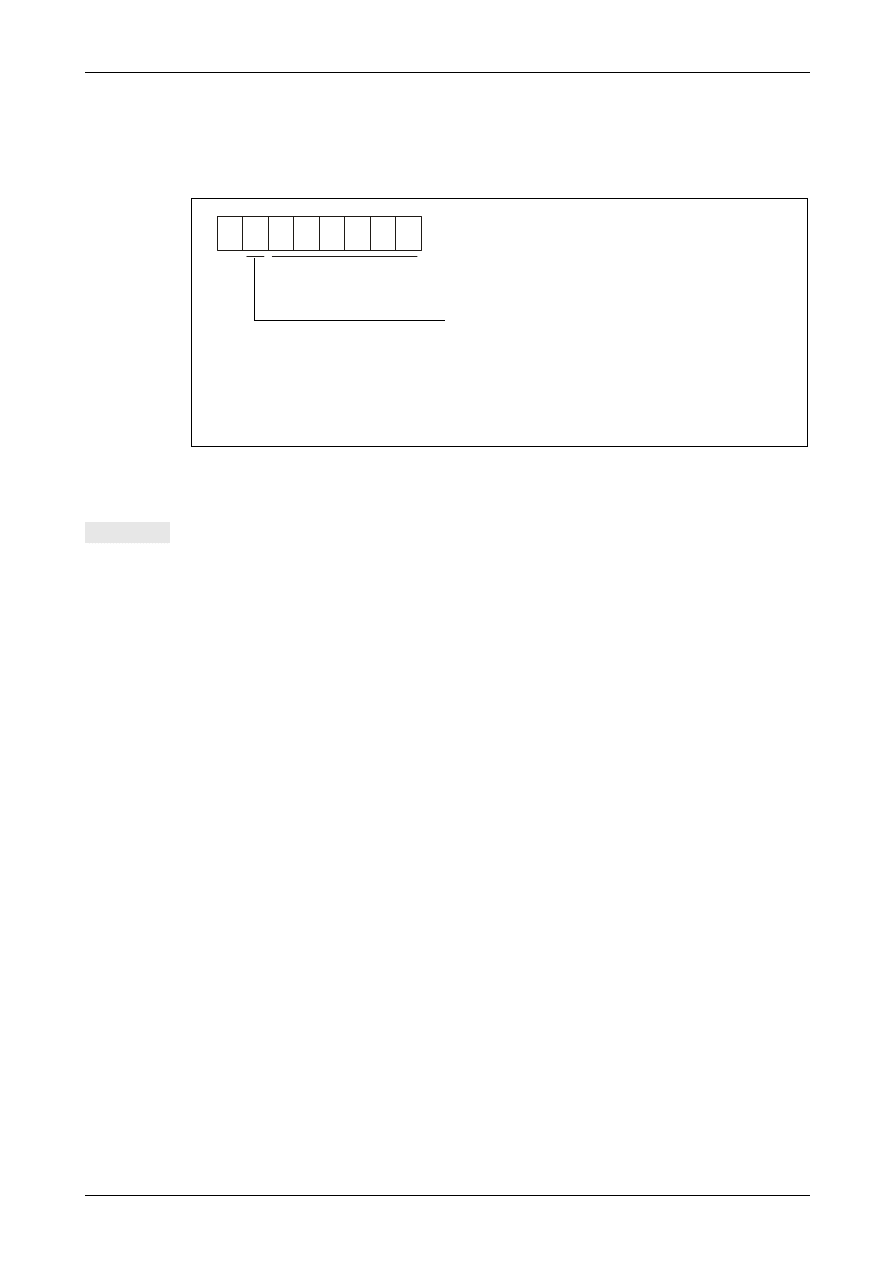
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 17
Zapis przetwarzanych danych
Jeżeli dane przeznaczone do zapisania reprezentowane są przez liczbę dziesiętną, konieczne
jest określenie położenia przecinka dziesiętnego. W przypadku, gdy zapisywana liczba ma być
traktowana jako szesnastkowa, położenie przecinka powinno być określone jako "0".
S000764C
Rys. 6-15: Dane do przesłania
PRZYKŁAD
Zapis liczby „15,5“
Przecinek dziesiętny znajduje się po drugim najmniej znaczącym znaku. Położenie
przecinka należy więc określić jako „2“. Aby liczbę dziesiętną przesłać w postaci szesnas-
tkowej, musi ona zostać przekonwertowana do tej postaci:
155
→ 9Bh
Przesłać należy wartość „0200009B“.
0
Dane przesyłane są w postaci szesnastkowej
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym znaku
[2]: po drugim znaku
[3]: po trzecim znaku
[4]: po czwartym znaku
[5]: po piątym znaku
[6]: po szóstym znaku
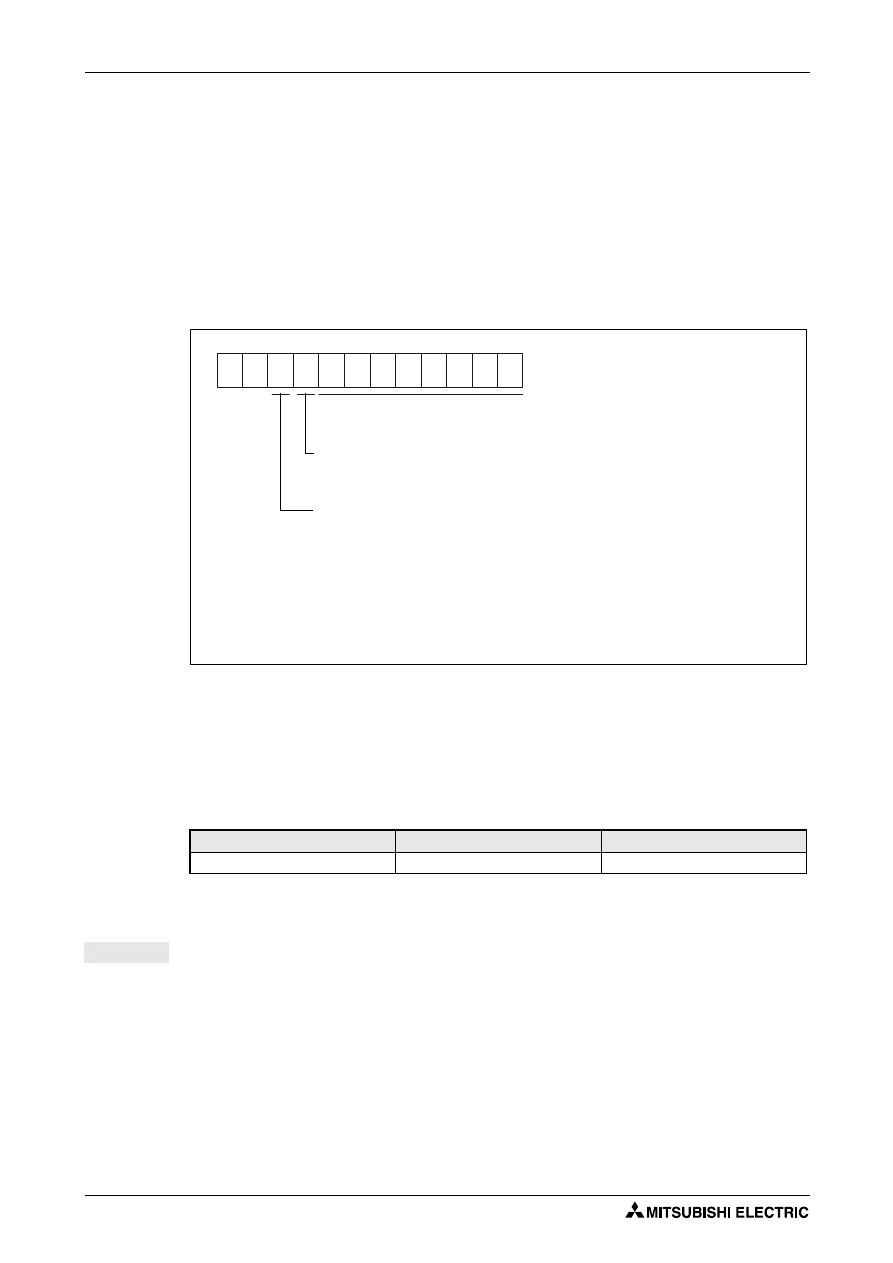
Komunikacja
Szczegółowy opis instrukcji
6 - 18
6.6.2 Komunikat
stanu
Odczyt komunikatu stanu
Po otrzymaniu ze stacji Master kodu danych (patrz tabele poniżej) Serwowzmacniacz odsyła
odpowiednie dane wraz z informacjami o sposobie ich przetwarzania.
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [0][1] i odpowiedni kod danych (patrz Rozdz. 6.5.1).
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz przesyła żądane dane o stanie serwonapędu
Kasowanie komunikatu stanu
Wyświetlana przez serwowzmacniacz ilość impulsów sprzężenia zwrotnego może zostać wy-
zerowana. Polecenie kasowania komunikatu stanu musi być wysłane bezpośrednio po jego
odczytaniu. Zostanie wyświetlona liczba 0.
S000762C
Rys. 6-16: Odpowiedź serwowzmacniacza
Kod instrukcji
Kod danych
Dane
[8][1]
[0][0]
1EA5
Tab. 6-22: Kasowanie komunikatu stanu
PRZYKŁAD
Po przesłaniu ze stacji Master polecenia odczytu ilości impulsów sprzężenia zwrotnego
(instrukcja [0][1] i kod danych [8][0]) dane zostaną przesłane do stacji Master i wyświetlone.
Bezpośrednio po tym należy przesłać instrukcję [8][1], kod danych [0][0] i dane [1EA5], co
spowoduje wyzerowanie i wyświetlenie wartości „0“.
0 0
Dane (32 Bit) (szesnastkowo)
(Dane wymagają konwersji lub nie, w zależności od znaku „Tryb wyświetlania")
Tryb wyświetlania
[0]: Konieczne przetwarzanie do postaci dziesiętnej
[1]: Dane pozostają w postaci szesnastkowej
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym najmniej znaczącym znaku (nie używane)
[2]: po drugim najmniej znaczącym znaku
[3]: po trzecim najmniej znaczącym znaku
[4]: po czwartym najmniej znaczącym znaku
[5]: po piątym najmniej znaczącym znaku
[6]: po szóstym najmniej znaczącym znaku
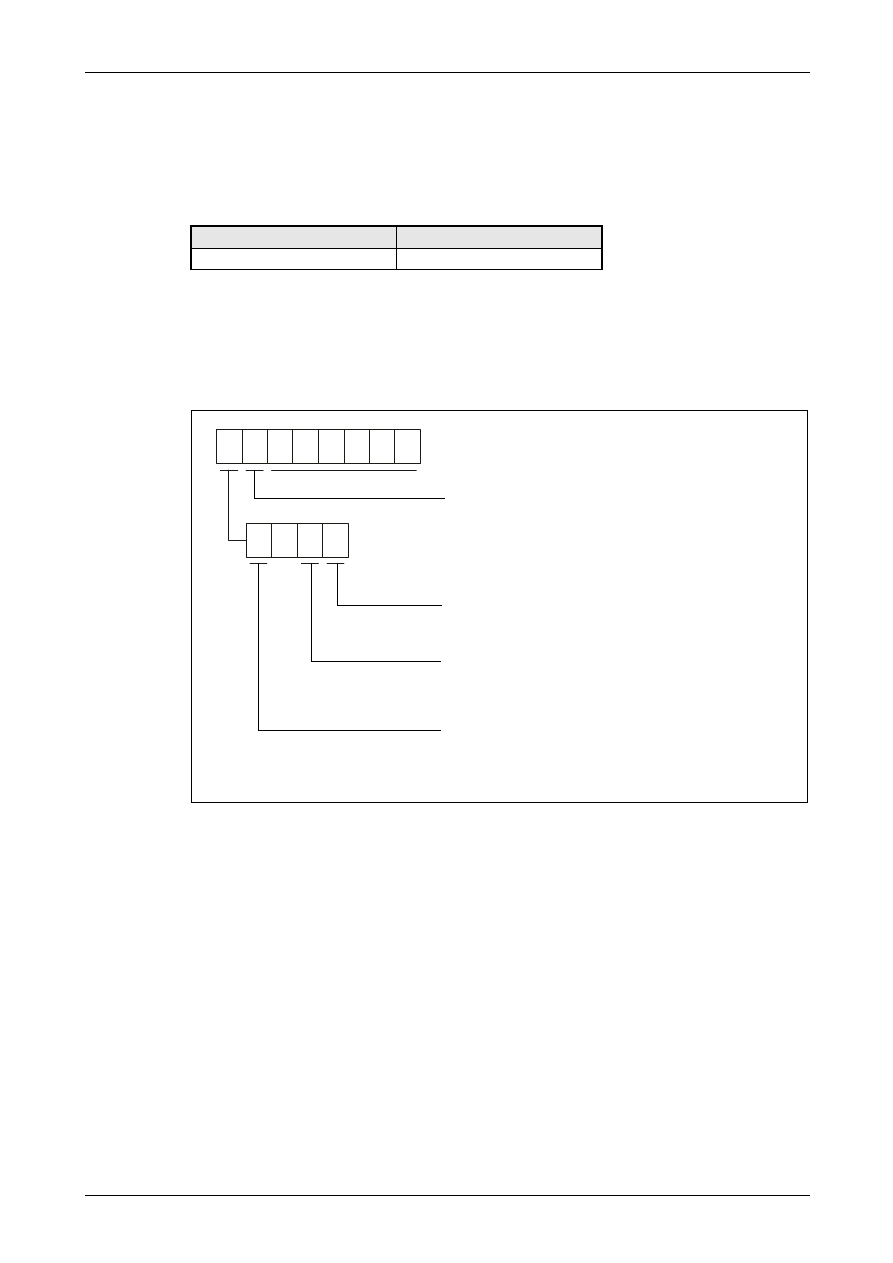
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 19
6.6.3 Parametry
Odczyt wartości parametru
●
Komunikat przesyłany ze stacji Master
Należy przesłać instrukcję [0][5] i kod danych, równy numerowi parametru do odczytu.
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła dane (wartość parametru) oraz informacje o sposobie ich przetwa-
rzania.
Dostęp do parametrów określany jest przez wartość parametru Pr. 19 "Blokada dostępu do
parametrów". Jeśli dostęp do parametru jest zablokowany, dane są traktowane jako niedostęp-
ne.
Kod instrukcji
Kod danych
[0][5]
[0][0] do [5][4]
Tab. 6-23: Odczyt wartości parametru
S000763C
Rys. 6-17: Odpowiedź serwowzmacniacza
0 0
0
Dane przesyłane są w postaci szesnastkowej
Tryb wyświetlania
[0]: Konieczne przetwarzanie do postaci dziesiętnej
[1]: Dane pozostają w postaci szesnastkowej
Aktywność parametru po jego zapisie
[0]: Aktywny bezpośrednio po zapisie
[1]: Aby nowa wartość parametru stała się aktywna, konieczne jest
wyłączenie i załączenie zasilania.
Dostęp do parametru
[0]: Dostępny do odczytu
[1]: Dostęp zablokowany
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym znaku
[2]: po drugim znaku
[3]: po trzecim znaku
[4]: po czwartym znaku
[5]: po piątym znaku
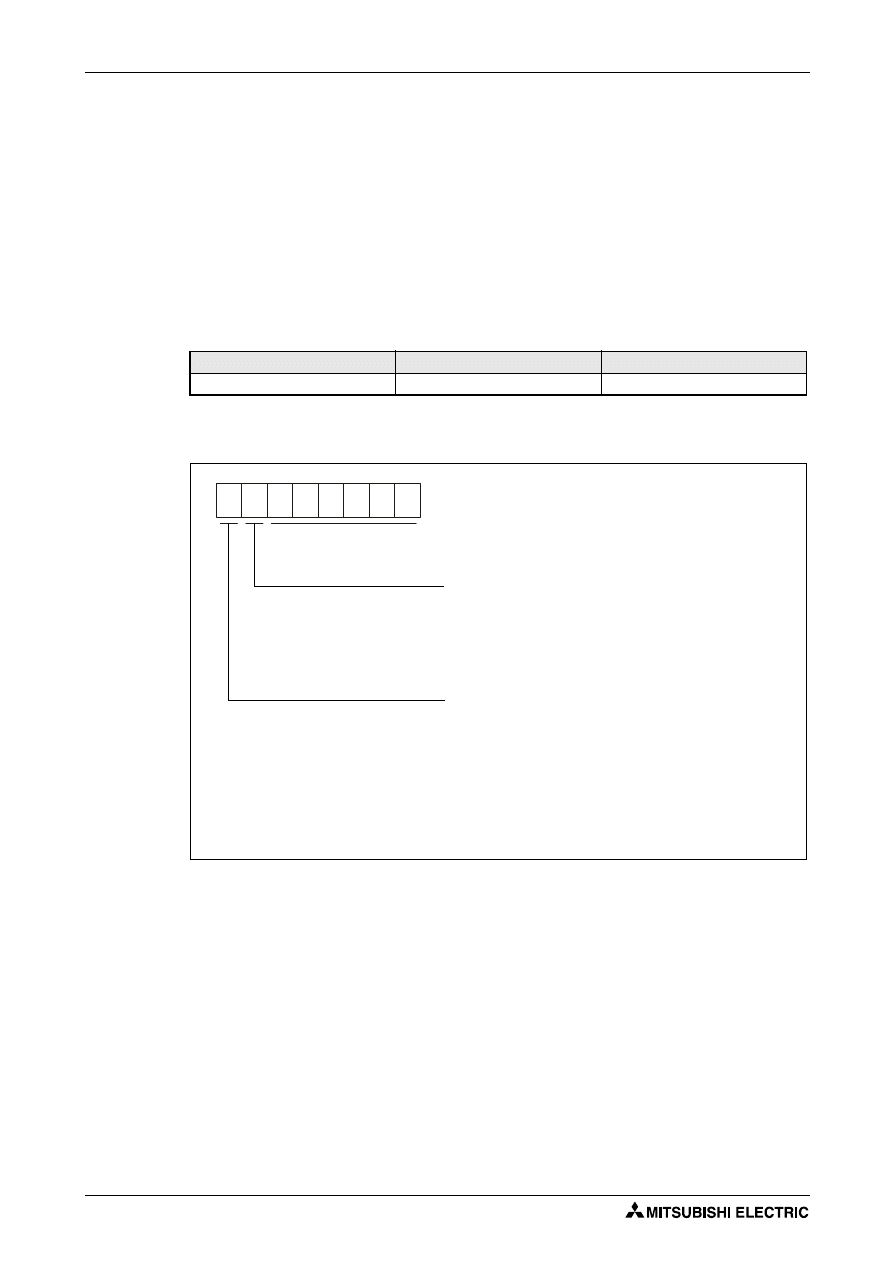
Komunikacja
Szczegółowy opis instrukcji
6 - 20
Zapis parametrów
W celu zapisania wartości parametru należy przesłać kod instrukcji [8][4], kod danych o wartości
równej numerowi parametru oraz dane, odpowiadające wpisywanej wartości parametru.
Jeżeli wpisywane dane mają być przetwarzane jako liczba dziesiętna, konieczne jest określenie
pozycji przecinka dziesiętnego. Bez podanej pozycji przecinka dziesiętnego zapis będzie nie-
możliwy. Jeżeli liczba ma być przetwarzana jako szesnastkowa, jako pozycję przecinka należy
podać 0.
Przy zapisie parametru należy upewnić się, że wpisywana wartość parametru leży w dopusz-
czalnym zakresie wartości danego parametru (patrz Rozdz. 4.3.5). Przy przygotowywaniu
danych zaleca się uprzedni odczyt danego parametru w celu upewnienia się co do położenia
przecinka dziesietnego. Po wykonaniu zapisu zaleca się jego kontrolny odczyt i weryfikację
zapisanej wartości.
Instrukcja
Kod danych
Dane
[8][4]
[0][0] do [5][4]
Patrz rysunek poniżej
Tab. 6-24: Zapis parametrów
S000904C
Rys. 6-18: Dane do zapisu parametru
Dane przesyłane są w postaci szesnastkowej
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym znaku
[2]: po drugim znaku
[3]: po trzecim znaku
[4]: po czwartym znaku
[5]: po piątym znaku
Tryb zapisu
[0]: zapis do EEPROM
[3]: zapis do RAM
Jeżeli wartość parametru jest zapisywana często
(np. częściej niż 1 raz na godzinę) należy wpisywać
wartość "3" i zapisywać parametr tylko w pamięci
RAM. Ilość cyklów zapisu do EEPROM jest
ograniczona do 100.000 (co pozwala np. na
zapisywanie co godzinę przez ok. 11 lat) i dalsze
próby zapisu mogą być przyczyną błędu.
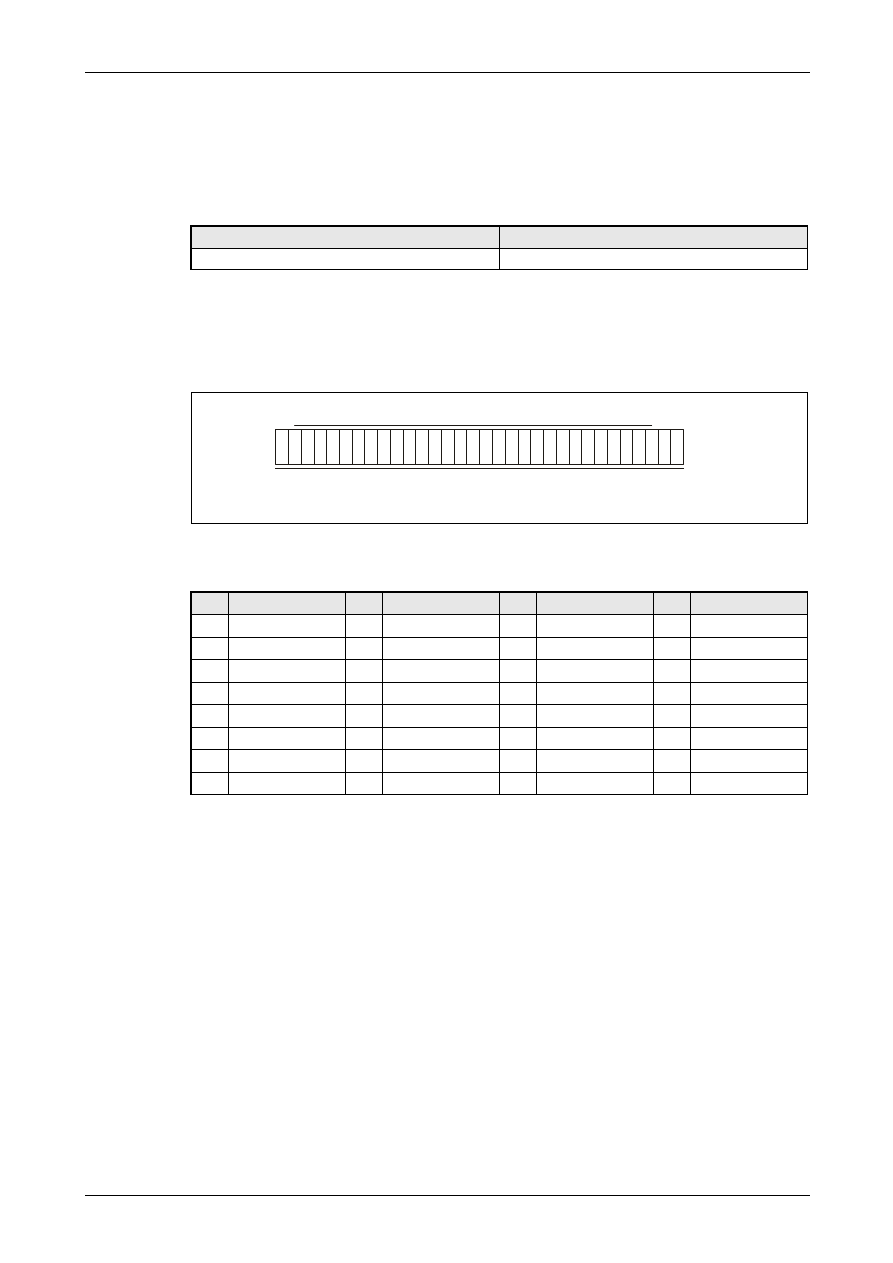
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 21
6.6.4 Stan
wejść/wyjść (diagnostyka I/O)
Odczyt stanów wejść dwustanowych
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [1][2] i kod danych [4][0].
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła dane o stanie wejść dwustanowych.
Kod instrukcji
Kod danych
[1][2]
[4][0]
Tab. 6-25: Odczyt stanu wejść dwustanowych
S000765C
Rys. 6-19: Odpowiedź serwowzmacniacza
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
0
CN1B-16
8
CN1B-9
16
—
24
—
1
CN1B-17
9
—
17
—
25
—
2
CN1B-15
10
—
18
—
26
—
3
CN1B-5
11
—
19
—
27
—
4
CN1B-14
12
—
20
—
28
—
5
CN1A-8
13
—
21
—
29
—
6
CN1B-7
14
—
22
—
30
—
7
CN1B-8
15
—
23
—
31
—
Tab. 6-26: Przyporządkowanie numerów zacisków do bitów danych
b31
b1 b0
1: EIN
0: AUS
Dane przesyłane są w postaci szesnastkowej
1: ON
0: OFF
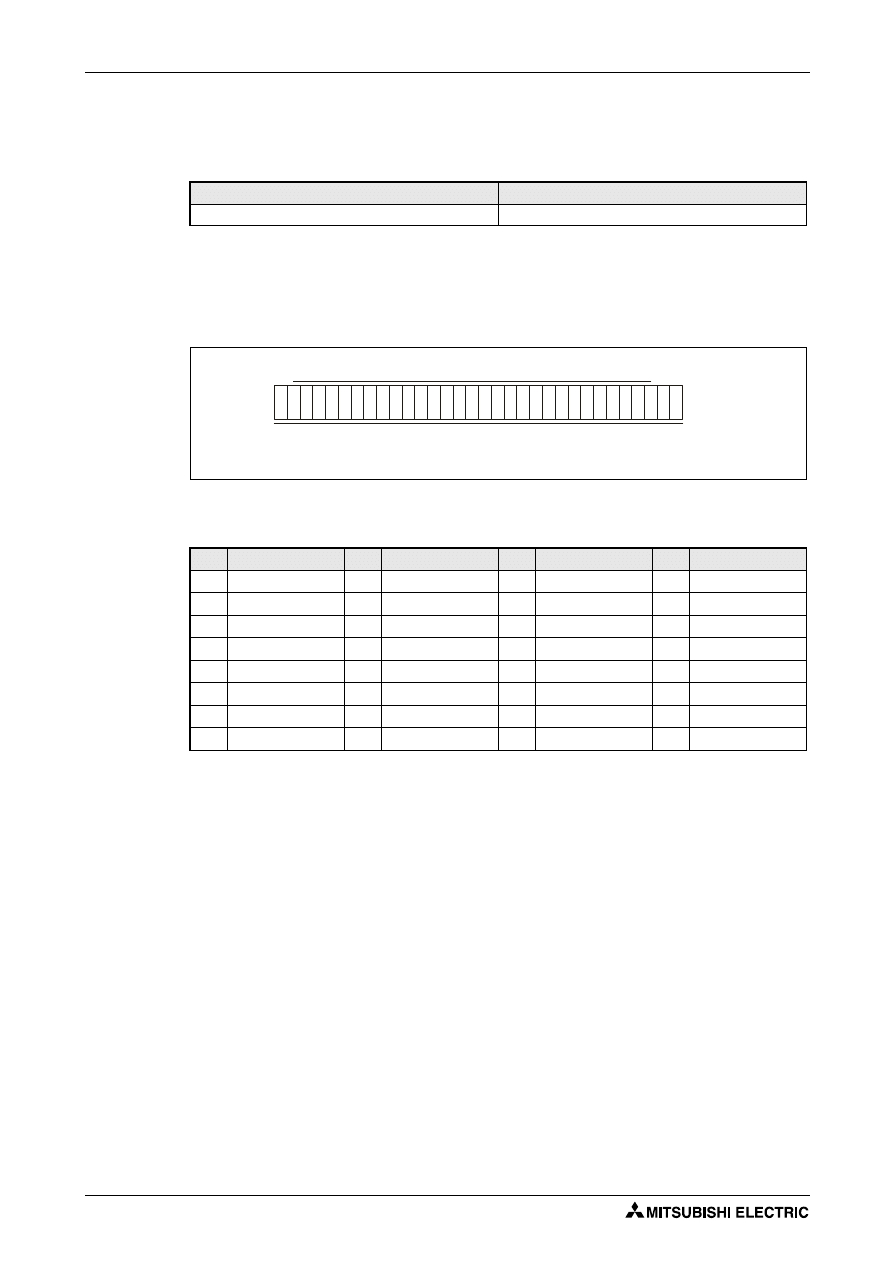
Komunikacja
Szczegółowy opis instrukcji
6 - 22
Odczyt stanów wyjść dwustanowych
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [1][2] i kod danych [C][0] .
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła dane o stanie wyjść dwustanowych.
Kod instrukcji
Kod danych
[1][2]
[C][0]
Tab. 6-27: Odczyt stanu wyjść dwustanowych
S000765C
Rys. 6-20: Odpowiedź serwowzmacniacza
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
0
CN1A-19
8
—
16
—
24
—
1
CN1A-18
9
—
17
—
25
—
2
CN1B-19
10
—
18
—
26
—
3
CN1B-6
11
—
19
—
27
—
4
CN1B-4
12
—
20
—
28
—
5
CN1B-18
13
—
21
—
29
—
6
CN1A-14
14
—
22
—
30
—
7
—
15
—
23
—
31
—
Tab. 6-28: Przyporządkowanie numerów zacisków do bitów danych
b31
b1 b0
1: EIN
0: AUS
Dane przesyłane są w postaci szesnastkowej
1: ON
0: OFF
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 23
6.6.5 Zablokowanie
i odblokowanie sygnałów wejściowych (DI)
Wejście może zostać zablokowane, tak że jego stan jest widziany przez serwowzmacniacz
zgodnie z danymi w poniższej tabeli, niezależnie od stanu rzeczywistego sygnału wejściowego.
Wejścia: EMG, LSP i LSN nie mogą być blokowane. Stan zablokowanego wejścia jest dla ser-
wowzmacniacza widoczny jako:
Blokada i zwolnienie blokady wejść dwustanowych (DI), wejść analogowych i impulso-
wych (za wyjątkiem wejść EMG, LSP i LSN).
Należy przesłać następujące kody instrukcji, kody danych i dane:
●
Zablokowanie wejść:
●
Odblokowanie wejść
Blokada i zwolnienie blokady wyjść dwustanowych (DO)
Należy przesłać następujące kody instrukcji, kody danych i dane:
●
Zablokowanie wyjść
●
Odblokowanie wyjść
Sygnał wejściowy
Stan
Sygnał na wejściu dwustanowym (DI)
OFF
Sygnał na wejściu analogowym
0 V
Ciąg impulsów
Brak impulsów
Tab. 6-29: Stan zablokowanych wejść serwowzmacniacza
Kod instrukcji
Kod danych
Dane
[9][0]
[0][0]
1EA5
Tab. 6-30: Zablokowanie wejść
Kod instrukcji
Kod danych
Dane
[9][0]
[1][0]
1EA5
Tab. 6-31: Odblokowanie wejść
Kod instrukcji
Kod danych
Dane
[9][0]
[0][3]
1EA5
Tab. 6-32: Zablokowanie wyjść
Kod instrukcji
Kod danych
Dane
[9][0]
[1][3]
1EA5
Tab. 6-33: Odblokowanie wyjść
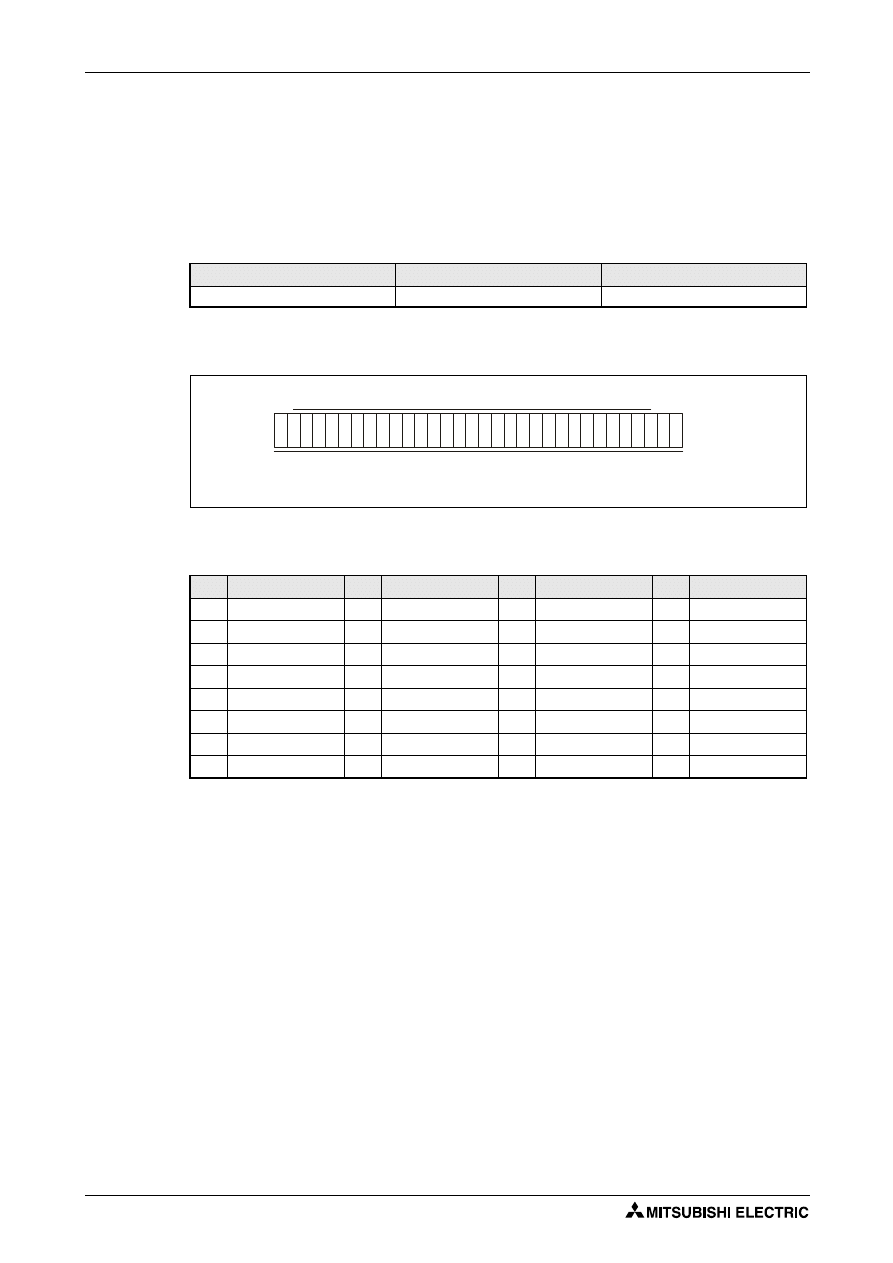
Komunikacja
Szczegółowy opis instrukcji
6 - 24
6.6.6 Przełączanie stanu wejść (operacje próbne)
Każdy z sygnałów wejściowych może być w trybie operacji próbnych przełączany ON/OFF. Po-
nieważ przełączanie wykonywane jest elektronicznie wewnątrz serwowzmacniacza, należy
odłączyć sygnały zewnętrzne, w przeciwnym wypadku wejście będzie działać jak bramka OR.
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [9][2], kod danych [0][0] i dane.
Kod instrukcji
Kod danych
Dane
[9][2]
[0][0]
zgodnie z poniższym rysunkiem
Tab. 6-34: Przełączanie stanu wejść
S000765C
Rys. 6-21: Dane
Bit
Sygnał
Bit
Sygnał
Bit
Sygnał
Bit
Sygnał
0
SON
8
—
16
—
24
—
1
LSP
9
—
17
—
25
—
2
LSN
10
—
18
—
26
—
3
TL
11
ST1
19
—
27
—
4
—
12
ST2
20
—
28
—
5
PC
13
—
21
—
29
—
6
RES
14
—
22
—
30
—
7
CR
15
—
23
—
31
—
Tab. 6-35: Przyporządkowanie sygnałów do bitów danych
b31
b1 b0
1: EIN
0: AUS
Dane przesyłane są w postaci szesnastkowej (każdy bit odrębnie)
1: ON
0: OFF
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 25
6.6.7 Operacje
próbne
Wskazówki do wykonywania operacji próbnych
Jeżeli podczas wykonywania operacji próbnych wystąpi przerwa w komunikacji na czas ponad
0,5 s, serwowzmacniacz wyhamuje serwosilnik i zablokuje go w stanie servo-lock. Aby temu
zapibiec, należy nieprzerwanie kontrolować komunikację, np. przez odczytywanie komunikatu
stanu.
●
Wykonywanie operacji próbnych
Operacje próbne należy wykonywać w następującym porządku:
a Odłączyć wszystkie sygnały wejściowe.
b Zablokować wszystkie sygnały wejściowe.
c Wybrać tryb operacji próbnych.
d Przygotować dane niezbędne dla operacji próbnych.
e Uruchomić operacje próbne.
f Zapewnić nieprzerwaną komunikację, np. przez ciągły odczyt komunikatu stanu itp.
Kod instrukcji
Kod danych
Dane
[9][0]
[0][0]
1EA5
Tab. 6-36: Zablokowanie wejść
Kod instrukcji
Kod danych
Dane
Wybrany tryb operacji próbnych
[8]B]
[0][0]
0000
Tryb operacji próbnych odwołany
0001
Praca krokowa (JOG)
0002
Pozycjonowanie
0003
Praca bez serwosilnika
0004
Wymuszanie stanów wyjść dwustanowych
Tab. 6-37: Wybór trybu operacji próbnych
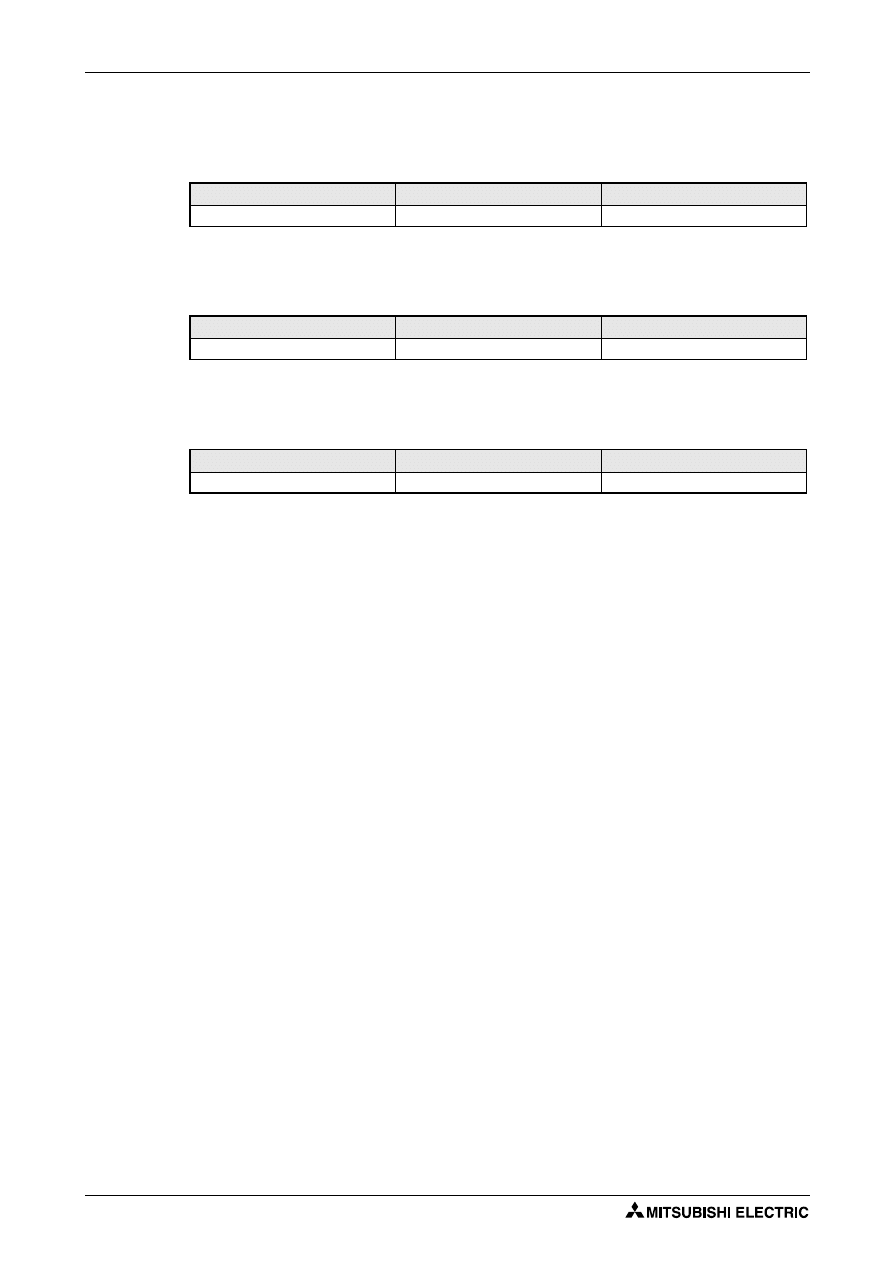
Komunikacja
Szczegółowy opis instrukcji
6 - 26
●
Zakończenie operacji próbnych
Pracę w trybie operacji próbnych należy zakończyć w następującym porządku:
a Skasować wartość czasu rozpędzania/hamowania dla operacji próbnych.
b Zakończyć pracę w trybie operacji próbnych.
c Odblokowanie zablokowanych uprzednio wejść.
Kod instrukcji
Kod danych
Dane
[A][0]
[1][2]
1EA5
Tab. 6-38: Kasowanie wartości czasu rozpędzania/hamowania dla operacji próbnych
Kod instrukcji
Kod danych
Dane
[8][B]
[0][0]
0000
Tab. 6-39: Zakończenie pracy w trybie operacji próbnych
Kod instrukcji
Kod danych
Dane
[9][0]
[1][0]
1EA5
Tab. 6-40: Odblokowanie wejść
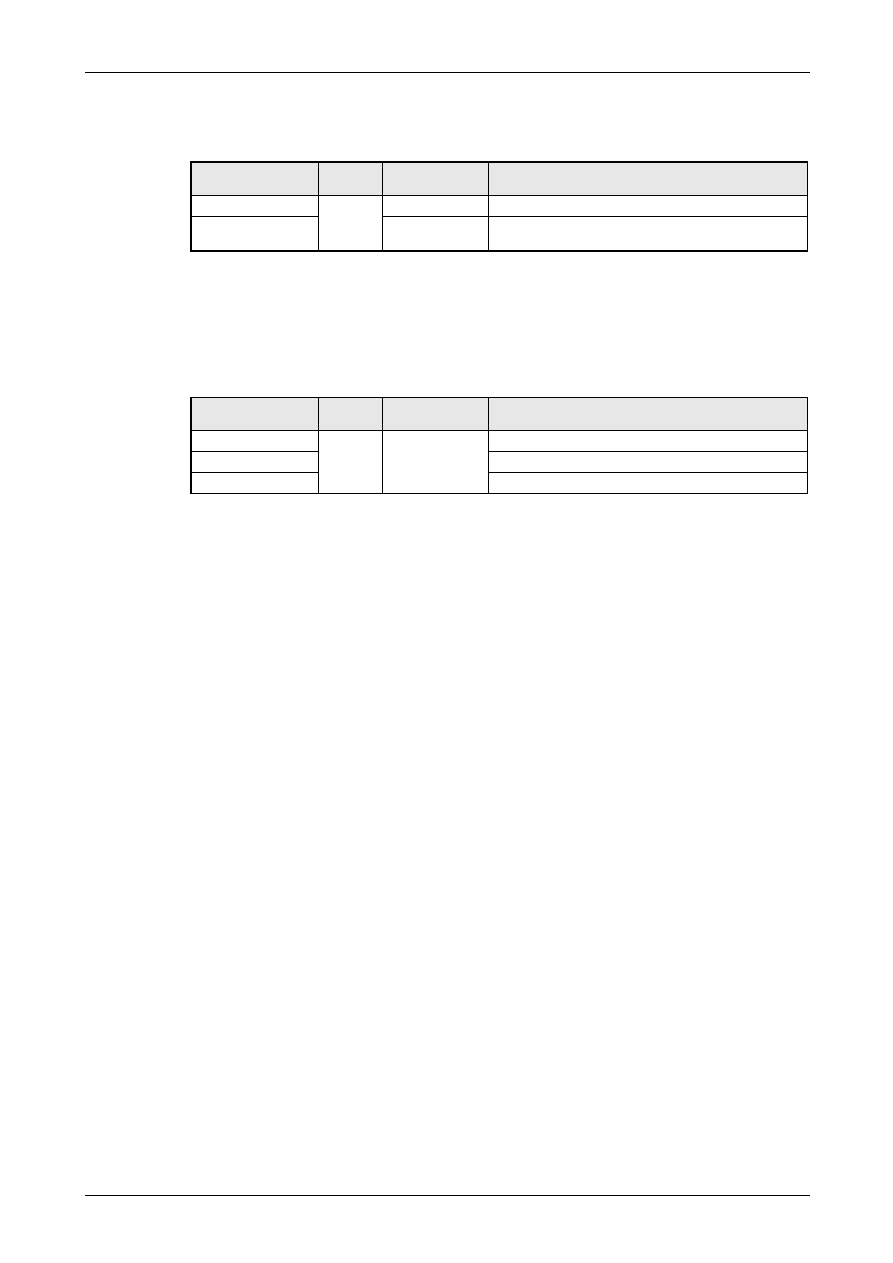
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 27
Praca krokowa (JOG)
●
Wpisanie danych dla trybu JOG
●
Uruchomienie trybu JOG
Załącz sygnały SON, LSP i LSN poprzez wysłanie instrukcji [9][2] z kodem danych [0][0] i
odpowiednimi danymi wg poniższej tabeli.
Nazwa
Kod in-
strukcji
Kod danych
Dane
Prędkość
[A][0]
[1][0]
Prędkość [obr/min] w postaci szesnastkowej
Czas rozpędzania/
hamowania
[1][1]
Czas rozpędzania/ hamowania [ms] w postaci szesnas-
tkowej
Tab. 6-41: Dane dla trybu JOG
Nazwa
Kod in-
strukcji
Kod danych
Dane
Obroty w prawo
[9][2]
[0][0]
00000807: Sygnały SON, LSP i LSN załączone
Obroty w lewo
00001007: Sygnały SON, LSP i LSN załączone
Stop
00000007: Sygnały SON, LSP i LSN załączone
Tab. 6-42: Uruchomienie serwonapędu w trybie JOG
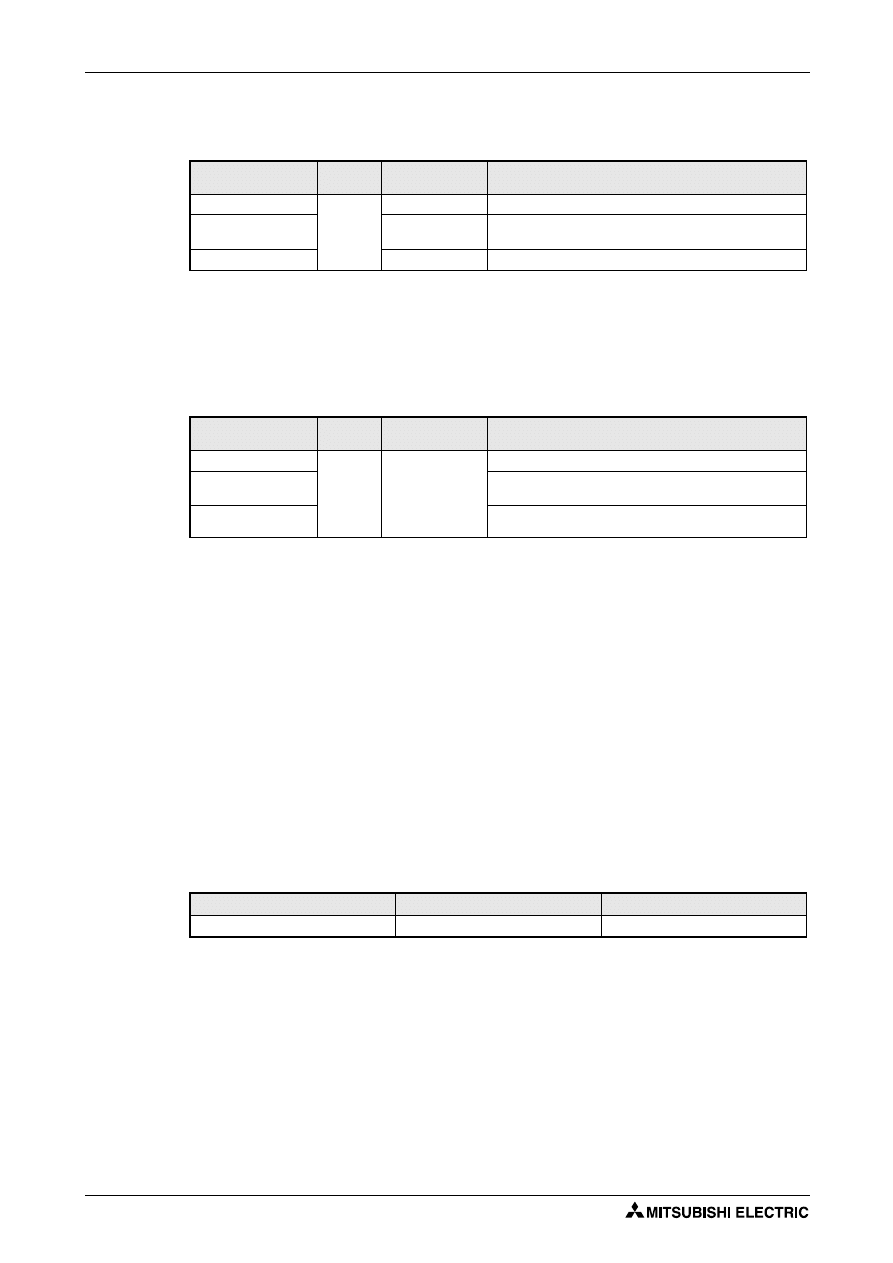
Komunikacja
Szczegółowy opis instrukcji
6 - 28
Pozycjonowanie
●
Wpisanie danych dla trybu pozycjonowania
●
Załączenie sygnału Servo-on i wyłączników krańcowych
Załącz sygnały SON, LSP i LSN przez wysłanie kodu instrukcji [9][2], kodu danych [0][0] i
odpowiednich danych wg poniższej tabeli.
●
Uruchomienie serwonapędu w trybie pozycjonowania:
a Prześlij dane o prędkości i czasie rozpędzania/hamowania
b Załącz sygnały SON, LSP i LSN - ON
c Prześlij wartość przemieszczenia - pozycjonowanie zostanie wykonane. Nastę pne ruchy
będą wykonywane po przesłaniu kolejnych wartości przemieszczenia. Aby wykonać ruch
w przeciwnym kierunku, wyślij ujemną wartość przemieszczenia.
Przy odłączonych sygnałach SON, LSP i LSP dane o wartości przemieszczenia nie są przyj-
mowane. Jeżeli więc wartość przemieszczenia zostanie przesłana przed załączeniem sy-
gnałów SON, LSP i LSP, przemieszczenie nie będzie wykonane.
●
Tymczasowe zatrzymanie
Ruch wykonywany w trybie pozycjonowania może zostać tymczasowo zatrzymany poleceniem:
W celu kontynuacji przemieszczenia wg poprzednich danych należy ponownie wysłać to samo
polecenie przemieszczenia. Aby w stanie tymczasowego zatrzymania całkowicie zatrzymać
serwonapęd, należy ponownie wysłać polecenie zatrzymania. Spowoduje to skasowanie
danych o pozostałej do wykonania wielkości przemieszczenia.
Nazwa
Kod in-
strukcji
Kod danych
Dane
Prędkość
[A][0]
[1][0]
Prędkość [obr/min] w postaci szesnastkowej
Czas rozpędzania/
hamowania
[1][1]
Czas rozpędzania/ hamowania [ms] w postaci szesnas-
tkowej
Przemieszczenie
[1][3]
Przemieszczenie [impulsów] w postaci szesnastkowej
Tab. 6-43: Dane dla trybu pozycjonowania
Nazwa
Kod in-
strukcji
Kod danych
Dane
Servo-on
[9][2]
[0][0]
00000001: Załączenie sygnału SON
Servo-off
LSP, LSN - ON
00000006: Wyłączenie sygnału SON, załączenie
sygnałów LSP i LSN
Servo-on
LSP, LSN - OFF
00000007: Załączenie sygnałów SON, LSP i LSN
Tab. 6-44: Przełączanie sygnału SON i wyłączników krańcowych
Kod instrukcji
Kod danych
Dane
[A][0]
[1][5]
1EA5
Tab. 6-45: Tymczasowe zatrzymanie
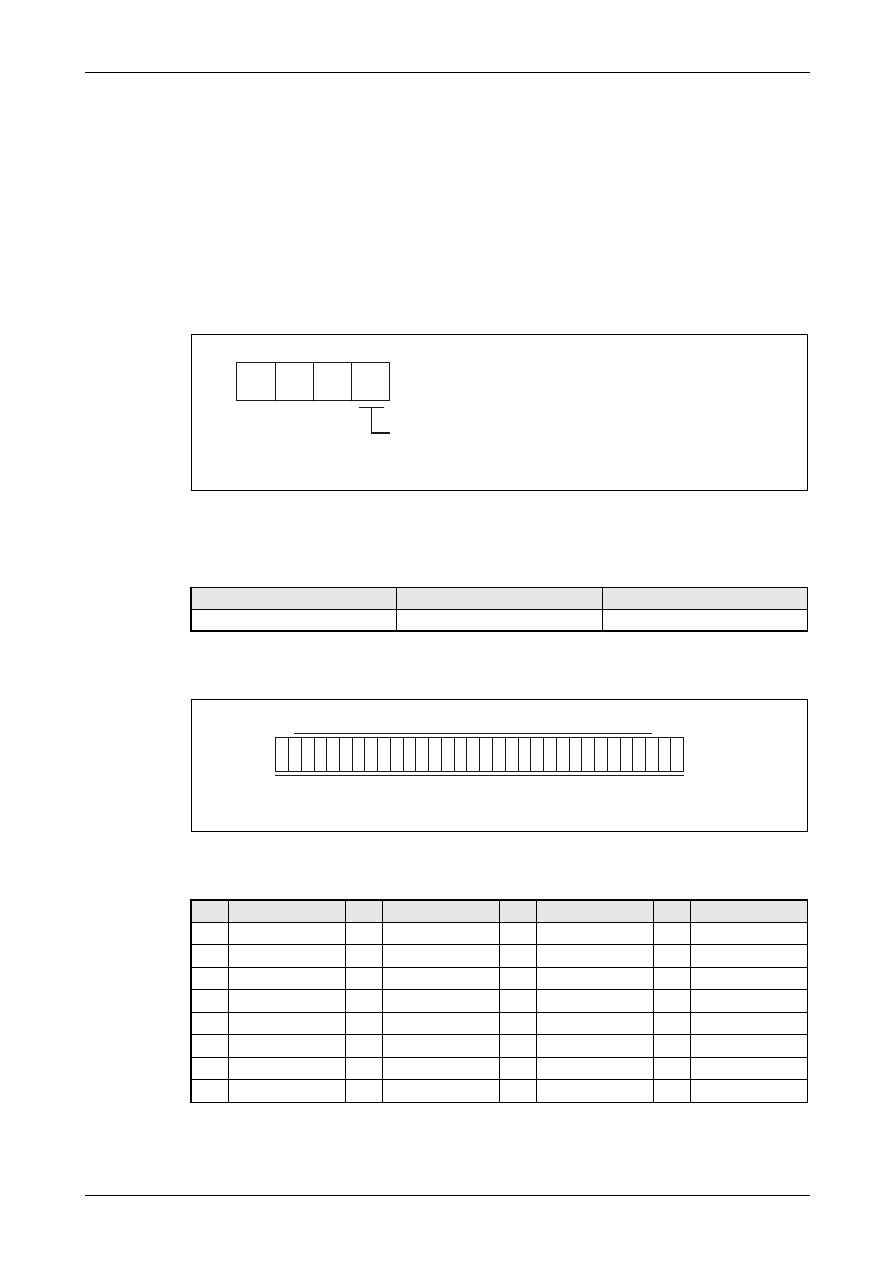
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 29
6.6.8 Przełączanie sygnałów wyjściowych ON/OFF (wymuszanie stanów wyjść
dwustanowych DO)
W trybie operacji próbnych wyjściowe sygnały dwustanowe mogą być dowolnie przełączane
niezależnie od rzeczywistego stanu serwonapędu.
Uprzednio należy zablokować wyjścia poprzez przesłanie kodu instrukcji [9][0].
Wybór trybu wymuszania stanu wyjść ON/OFF
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [8][B], kod danych [0][0] i dane „0004“.
Przełączanie stanu wyjść dwustanowych ON/OFF
●
Komunikat przesyłany ze stacji Master
S000901C
Rys. 6-22: Wymuszanie stanów wyjść
Kod instrukcji
Kod danych
Dane
[9][2]
[A][0]
zgodnie z poniższym rysunkiem
Tab. 6-46: Przełączanie stanu wyjść dwustanowych
S000765C
Rys. 6-23: Dane
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
Bit
Nr zacisku
0
CN1A-19
8
—
16
—
24
—
1
CN1A-18
9
—
17
—
25
—
2
CN1B-19
10
—
18
—
26
—
3
CN1B-6
11
—
19
—
27
—
4
CN1B-4
12
—
20
—
28
—
5
CN1B-18
13
—
21
—
29
—
6
CN1A-14
14
—
22
—
30
—
7
—
15
—
23
—
31
—
Tab. 6-47: Przyporządkowanie numerów zacisków do bitów
0
0
0
4
Wybór trybu operacji próbnych:
[4]: wymuszanie stanów wyjść
b31
b1 b0
1: EIN
0: AUS
Dane przesyłane są w postaci szesnastkowej
1: ON
0: OFF
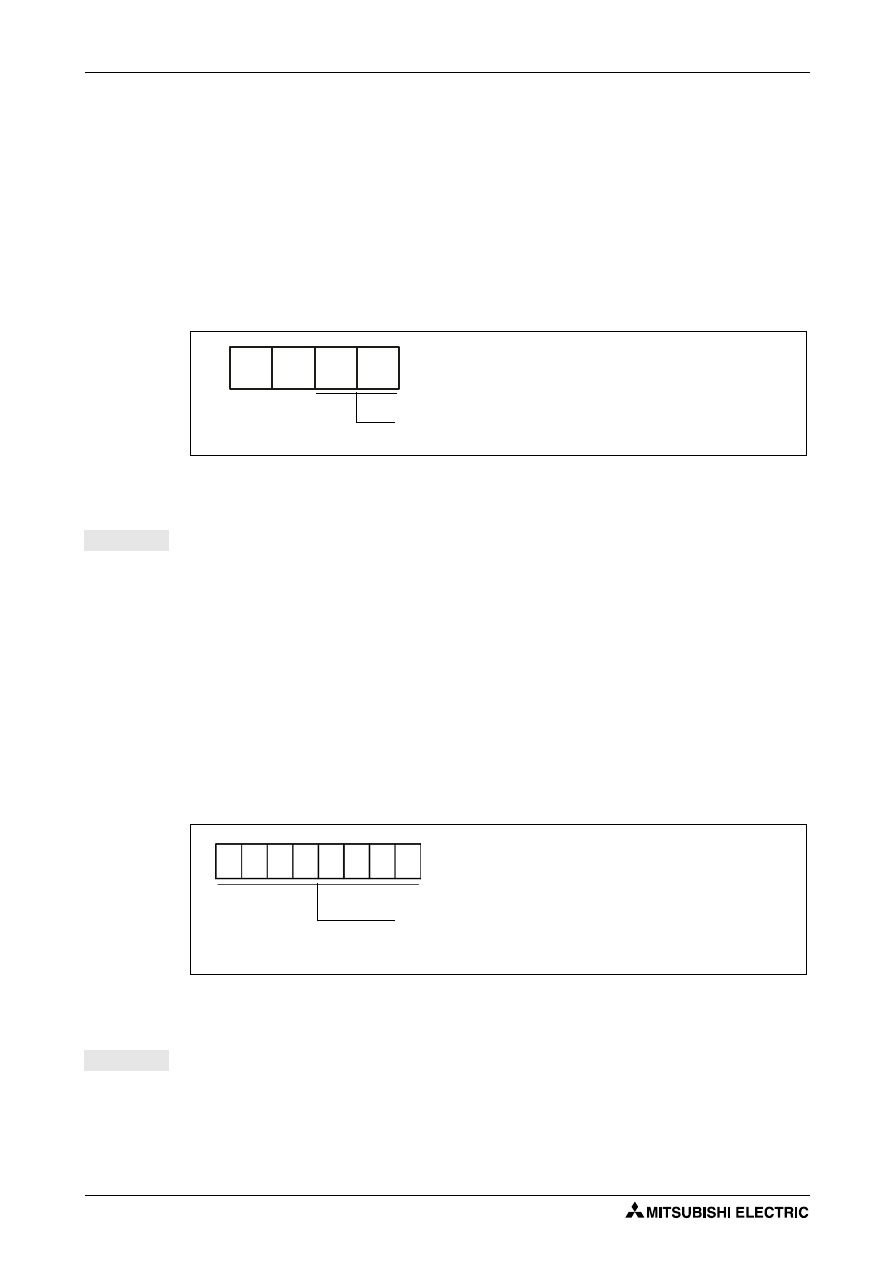
Komunikacja
Szczegółowy opis instrukcji
6 - 30
6.6.9 Historia
alarmów
Odczyt numeru alarmu
Możliwy jest odczyt sześciu ostatnich alarmów. Numer 0 odpowiada bieżącemu alarmowi, nu-
mery 1 - 5 kolejno pięciu poprzednim alarmom.
●
Komunikat przesyłany ze stacji Master
należy przesłać kod instrukcji [3][3] i kod danych [1][0] do [1][5] (patrz także Rozdz. 6.5.1).
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master odpowiedni numer alarmu.
Czas wystąpienia alarmu
Możliwe jest odczytanie czasu, w którym wystąpił każdy alarm spośród zarejestrowanych w his-
torii alarmów . Czas rejestrowany jest w godzinach, liczonych od uruchomienia serwonapędu,
z pominięciem minut.
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [3][3] i kod danych [2][0] do [2][5] (patrz także Rozdz. 6.5.1).
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master dane zawierające czas wystąpienia alarmu.
S000619C
Rys. 6-24: Odpowiedź serwowzmacniacza
PRZYKŁAD
AL.32 :
0032
AL._ :
00FF (brak alarmu)
S000956T
Rys. 6-25: Odpowiedź serwowzmacniacza
PRZYKŁAD
Wartość [0][1][F][5] oznacza, że alarm wystąpił w 501 godzinie pracy serwowzmacniacza.
0
0
Numer alarmu jest przesyłany w postaci dziesiętnej.
Czas wystąpienia alarmu jest przesyłany w postaci szesnastkowej.
Wartość szesnastkowa wymaga konwersji do postaci dziesiętnej
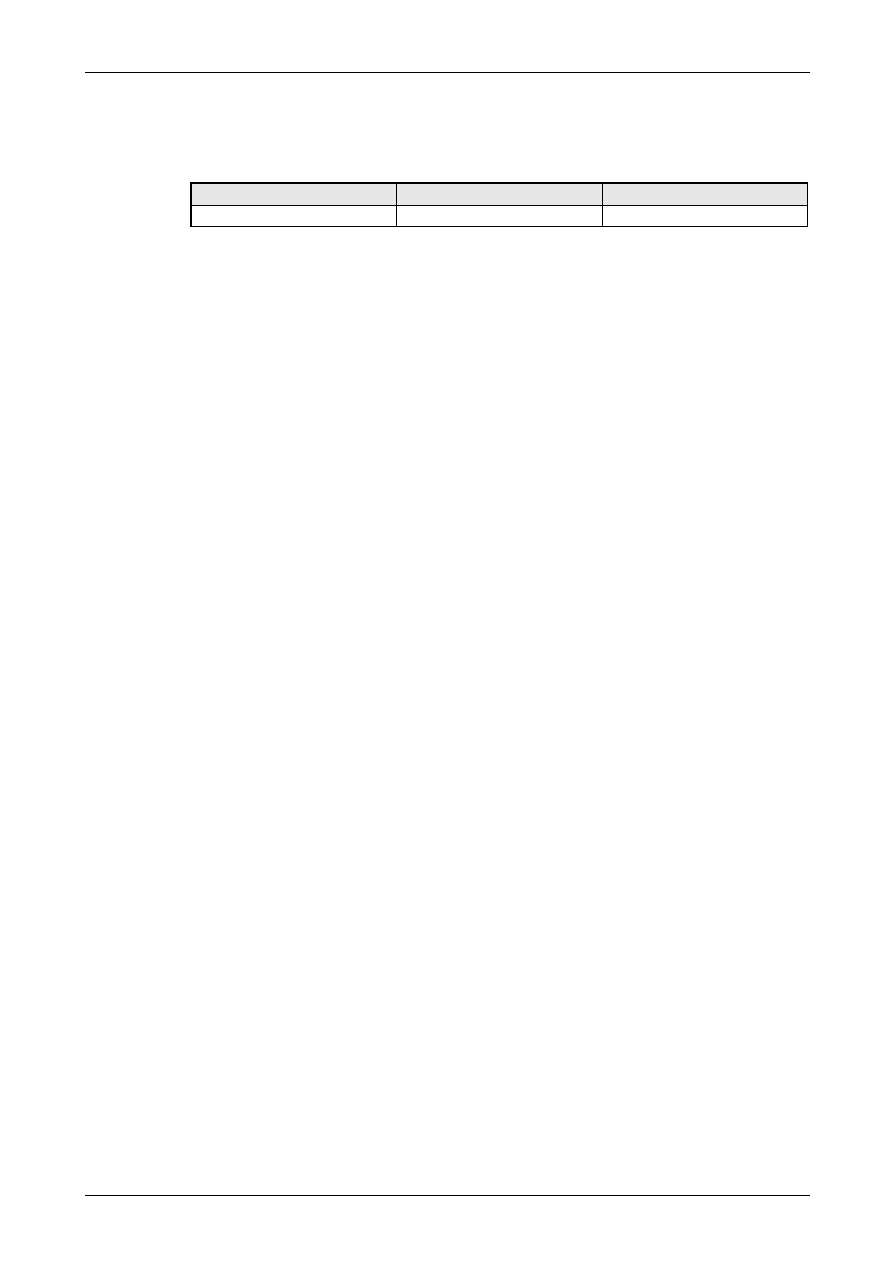
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 31
Kasowanie historii alarmów
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [8][2], kod danych [2][0] i dane.
Kod instrukcji
Kod danych
Dane
[8][2]
[2][0]
[1][E][A][5]
Tab. 6-48: Kasowanie historii alarmów
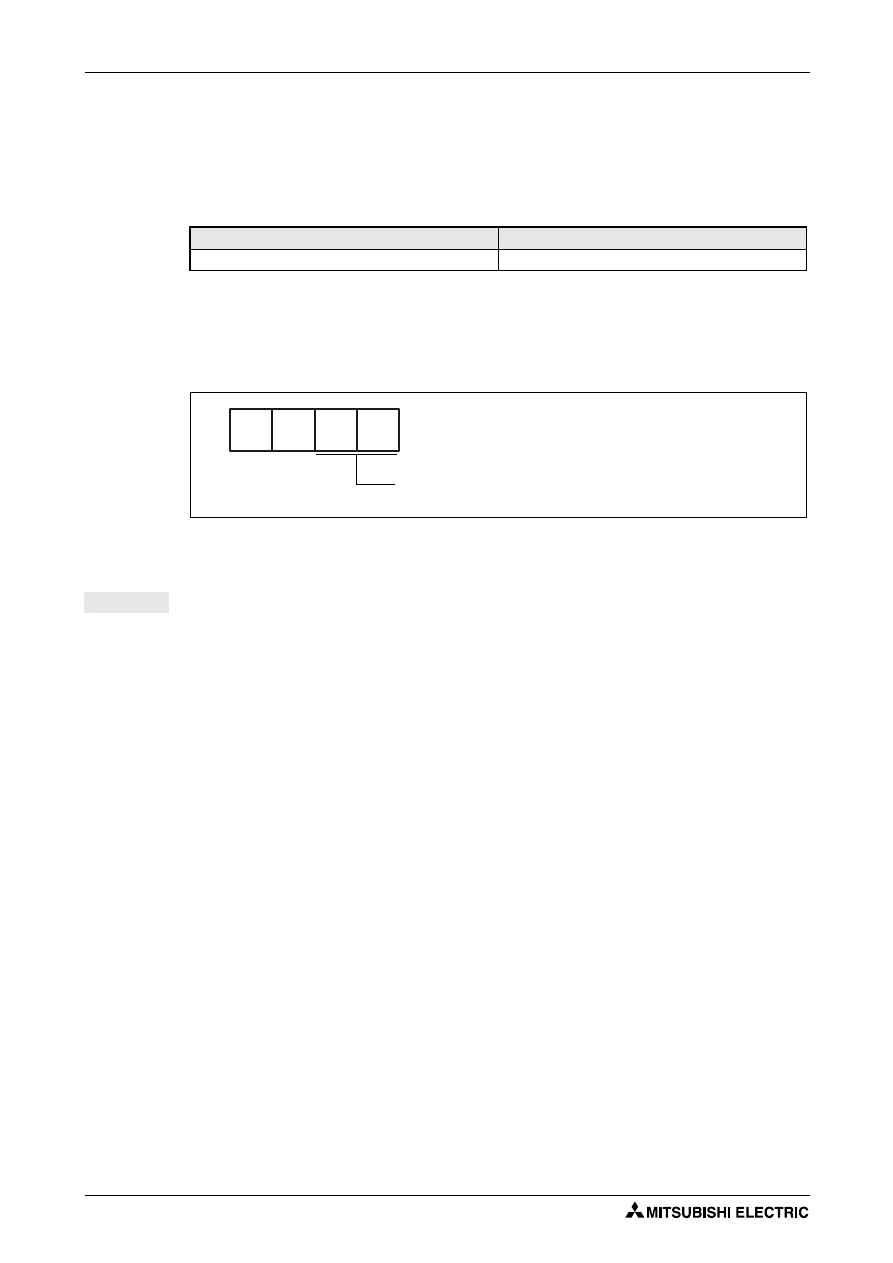
Komunikacja
Szczegółowy opis instrukcji
6 - 32
6.6.10 Bieżący alarm
Odczyt bieżącego alarmu
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [0][2] i kod danych [0][0] .
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master dane zawierające numer bieżącego alarmu.
Kod instrukcji
Kod danych
[0][2]
[0][0]
Tab. 6-49: Odczyt bieżącego alarmu
S000619C
Rys. 6-26: Odpowiedź serwowzmacniacza
PRZYKŁAD
AL.32 :
0032
AL._ :
00FF (brak alarmu)
0
0
Numer alarmu jest przesyłany w postaci dziesiętnej.
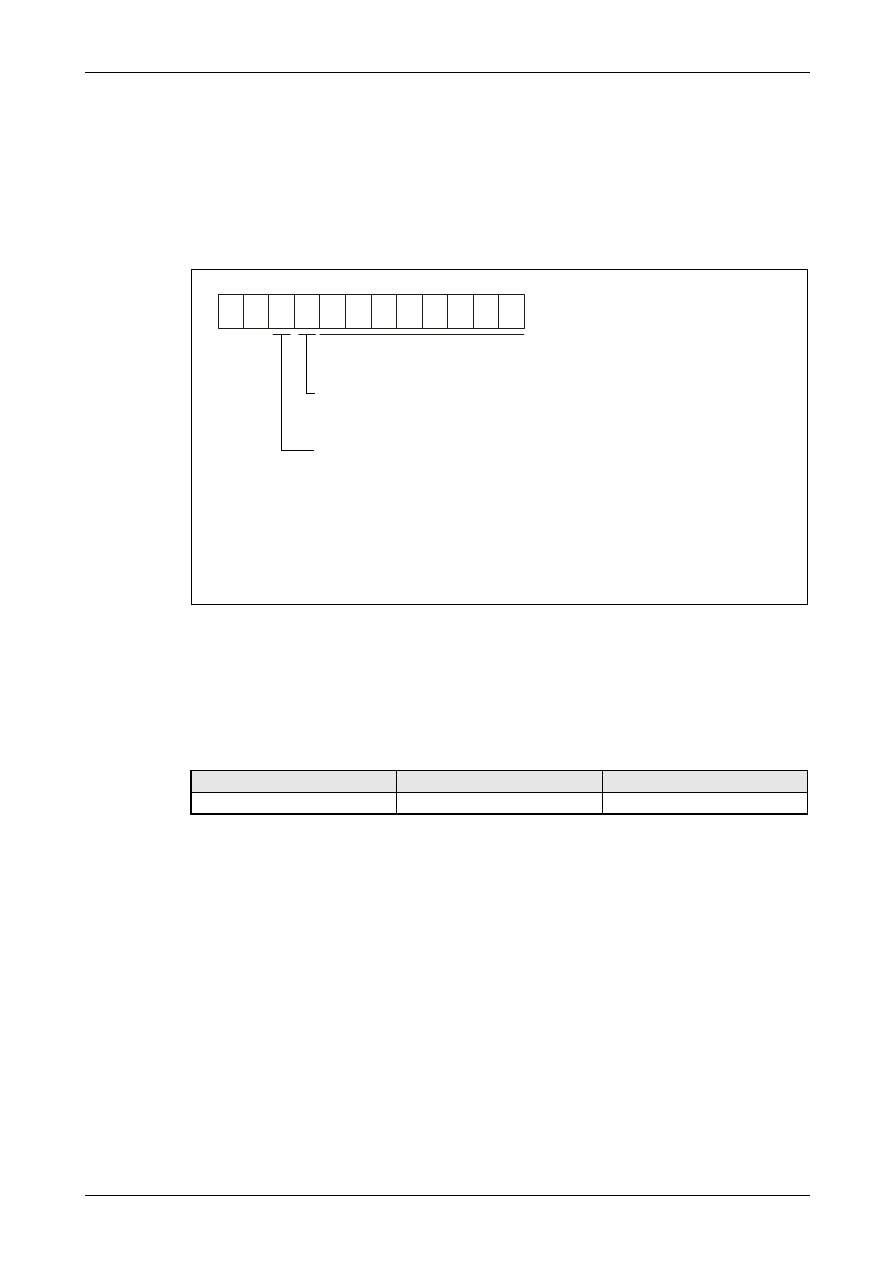
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 33
Odczyt komunikatu stanu dla chwili wystąpienia alarmu
Możliwe jest odczytanie komunikatu stanu dla chwili wystąpienia alarmu.
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [3][5] i kod danych [8][0] do [8][E] (patrz także Rozdz. 6.5.1).
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła komunikat stanu, jaki był wyświetlany w chwili wystąpienia alarmu.
Kasowanie (reset) bieżącego alarmu
Poprzez podanie sygnału resetu RES serwowzmacniacz przywracany jest do stanu normalnej
pracy. Alarm należy resetować dopiero po usunięciu jego przyczyny i przy odłączonych sy-
gnałach zadających.
S000762C
Rys. 6-27: Odpowiedź serwowzmacniacza
Kod instrukcji
Kod danych
Dane
[8][2]
[0][0]
1EA5
Tab. 6-50: Kasowanie bieżącego alarmu
0 0
Dane (32 bit, w postaci szesnastkowej)
(Dane wymagają konwersji zgodnie z trybem wyświetlania
Tryb wyświetlania
[0]: Konieczne przetwarzanie do postaci dziesiętnej
[1]: Dane pozostają w postaci szesnastkowej
Pozycja przecinka dziesiętnego:
[0]: bez przecinka dziesiętnego
[1]: po pierwszym znaku
[2]: po drugim znaku
[3]: po trzecim znaku
[4]: po czwartym znaku
[5]: po piątym znaku
[6]: po szóstym znaku
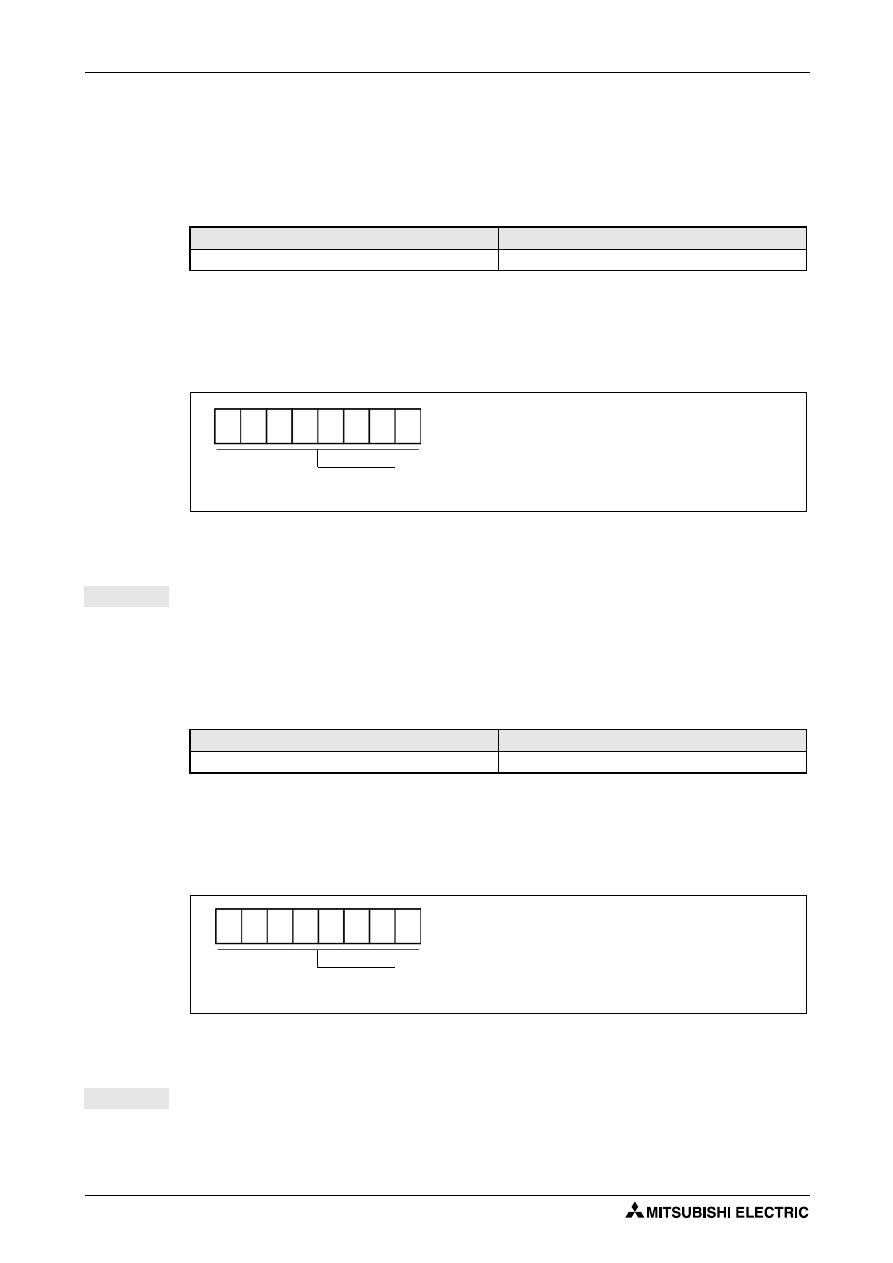
Komunikacja
Szczegółowy opis instrukcji
6 - 34
6.6.11 Inne
polecenia
Odczyt pozycji absolutnej (wyrażonej w impulsach enkodera)
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [0][2] i kod danych [9][0].
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master ilość impulsów enkodera.
Odczyt wartości pozycji absolutnej (wartości zadanej ciągiem impulsów)
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [0][2] i kod danych [9][1].
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master ilość impulsów zadających.
Kod instrukcji
Dane
[0][2]
[9][0]
Tab. 6-51: Odczyt pozycji absolutnej (w impulsach enkodera)
S000956T
Rys. 6-28: Odpowiedź serwowzmacniacza
PRZYKŁAD
Przesłane dane „000186A0“ odpowiadają 100 000 impulsów enkodera.
Kod instrukcji
Dane
[0][2]
[9][1]
Tab. 6-52: Odczyt wartości pozycji absolutnej (wartości zadanej ciągiem impulsów)
S000956T
Rys. 6-29: Odpowiedź serwowzmacniacza
PRZYKŁAD
Przesłane dane „000186A0“ odpowiadają 100 000 impulsów enkodera.
Wartość pozycji absolutnej w postaci szesnastkowej.
Dane wymagają konwersji do postaci dziesiętnej.
Wartość pozycji absolutnej w postaci szesnastkowej.
Dane wymagają konwersji do postaci dziesiętnej.
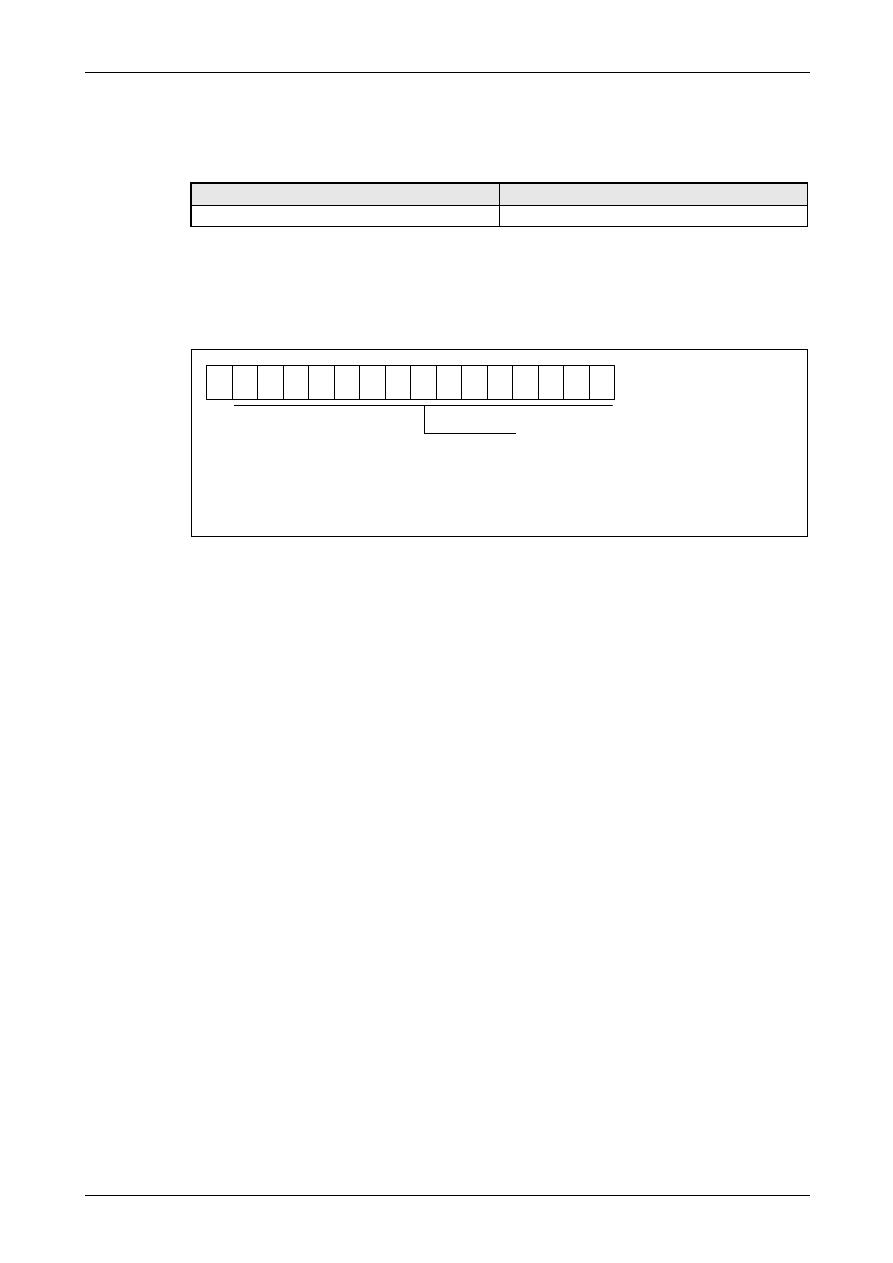
Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 35
Odczyt wersji oprogramowania
●
Komunikat przesyłany ze stacji Master
Należy przesłać kod instrukcji [0][2] i kod danych [7][0] .
●
Odpowiedź serwowzmacniacza
Serwowzmacniacz odsyła do stacji Master numer wersji swojego oprogramowania (firmware).
Kod instrukcji
Kod danych
[0][2]
[7][0]
Tab. 6-53: Odczyt wersji oprogramowania (firmware)
S000905C
Rys. 6-30: Odpowiedź serwowzmacniacza
0
Wersja oprogramowania (15 znaków)

Komunikacja
Szczegółowy opis instrukcji
6 - 36

Szczegółowy opis instrukcji
Komunikacja
Serwonapędy MELSERVO MR-J2Super-A
6 - 37
NOTATKI:

Komunikacja
Szczegółowy opis instrukcji
6 - 38
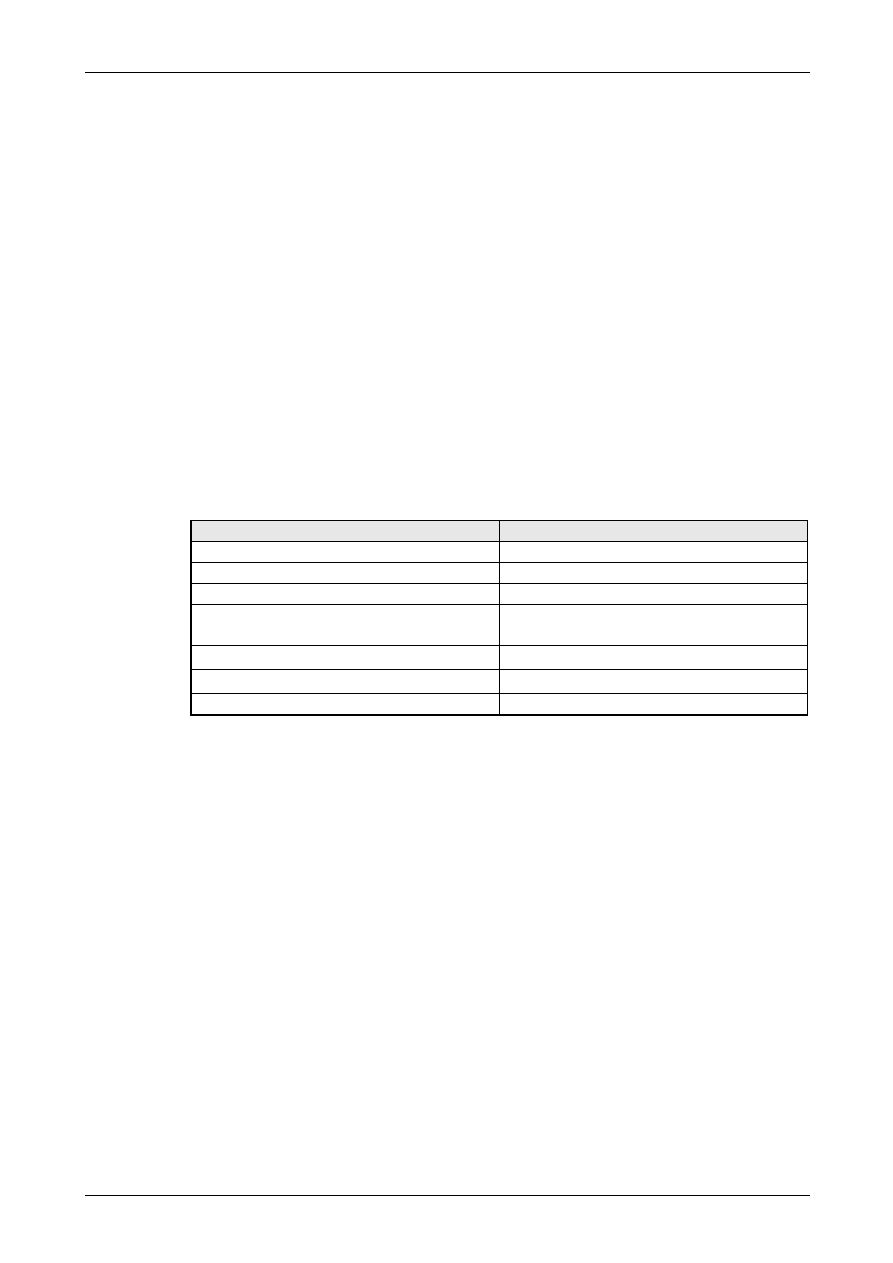
Uwagi ogólne
System pozycjonowania absolutnego
Serwonapędy MELSERVO MR-J2Super-A
7 - 1
7
System pozycjonowania absolutnego
7.1 Uwagi
ogólne
7.1.1 Ograniczenia
Funkcja pozycjonowania absolutnego NIE MOŻE być używana w następujacych warunkach:
– Tryb regulacji prędkości, tryb regulacji momentu, tryby przełączane: regulacja
położenia/prędkości, prędkości/momentu, momentu/położenia
– Tryb operacji próbnych (przed przejściem do trybu operacji próbnych należy zawsze
wybrać pozycjonowanie inkrementalne w Pr. 1)
– Pozycjonowanie bez ograniczeń przemieszczenia (np. napęd nawijarki, taśmociąg)
– Zmiana wartości przekładni elektronicznej po wykonanym bazowaniu
– Użycie wyjść do wydawania kodu alarmu
7.1.2 Dane
techniczne
a
Maksymalna prędkość, z którą może obracać się wał serwosilnika przy braku napięcia
zasilania, (np. z rozpędu lub pod działaniem zewnętrznej siły)
b
Czas podtrzymania danych przy stale wyłączonym napięciu zasilania serwowzmacniacza.
Zaleca się wymianę baterii co 3 lata niezależnie od obecności zasilania.
c
Czas na który dane są podtrzymane kondensatorowo w enkoderze przy braku zasilania
sieciowego i przy jednoczesnym zbyt niskim napięciu baterii lub jej braku, lub przy
odłączonym kablu enkodera. Wymiana baterii musi być wykonana w tym czasie.
Dane techniczne
Opis
System
System absolutny z podtrzymaniem bateryjnym
Bateria podtrzymująca pamięć
Bateria litowa typu A6BAT lub MR-BAT
Max. ilość obrotów serwosilnika
Pozycja bazowa +/- 32767 obrotów
Maksymalna prędkość przy zaniku zasilania
a
500 obr/min
Czas bateryjnego podtrzymania danych
b
Ok. 10000 h
Czas podtrzymania danych podczas wymiany baterii
c
2 h w chwili dostawy, 1 h po 5 latach
Czas życia baterii
Ok. 5 lat od daty produkcji
Tab. 7-1: Przegląd danych technicznych
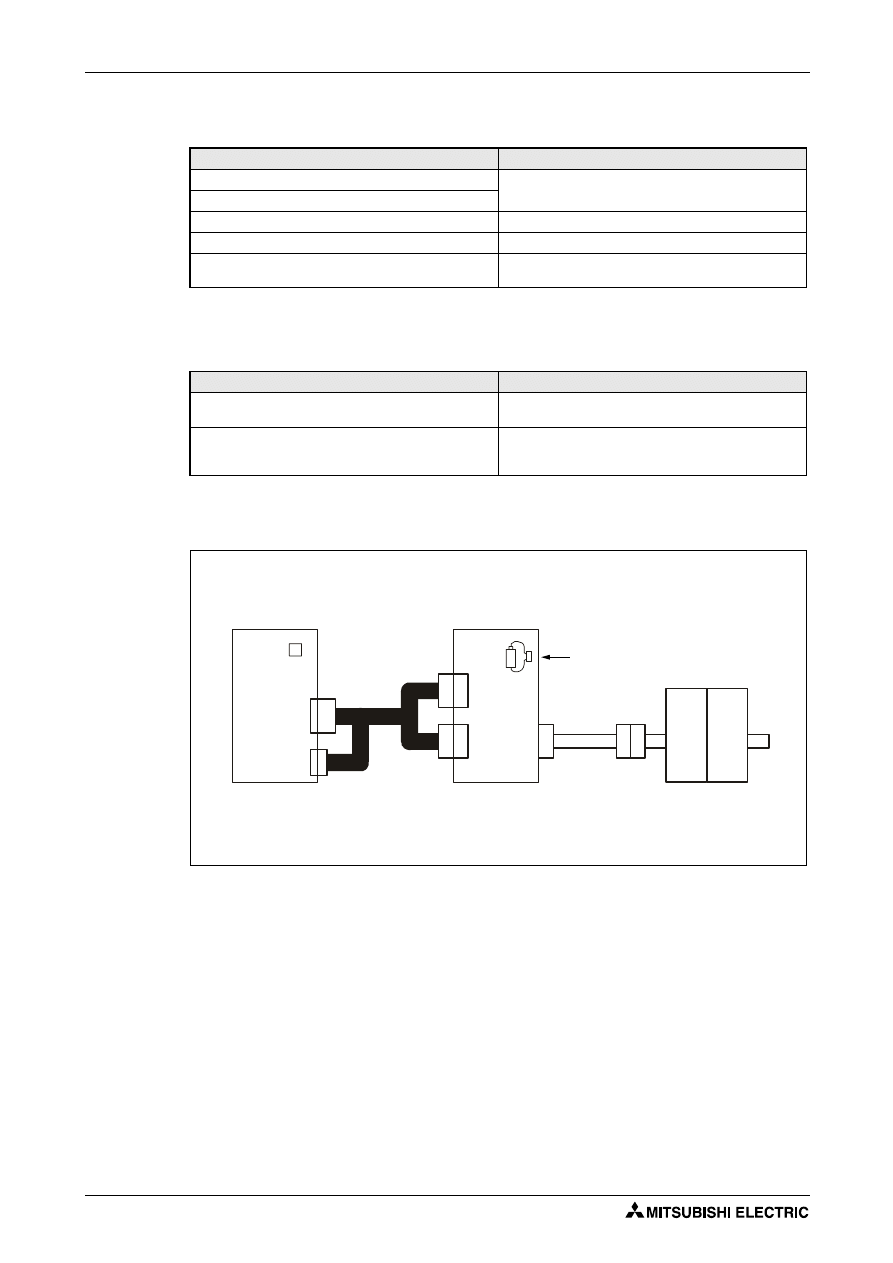
System pozycjonowania absolutnego
Uwagi ogólne
7 - 2
7.1.3 Niezbędne elementy
Element
Opis
Serwowzmacniacz
Używa się standardowych serwowzmacniaczy i ser-
wosilników, bez zmian w konfiguracji.
Serwosilnik
Bateria
A6BAT lub MR-BAT
Kabel enkodera
Należy użyć standardowego kabla (patrz Rozdz. 8.1.2).
PLC
Moduł wejść/ wyjść z 3 wejściami i 2 wyjściami do prze-
twarzania danych o pozycji
Tab. 7-2: Niezbędne elementy systemu
Moduł pozycjonujący
Moduł wejść/wyjść
AD71, AD75P (A1SD71-S2, A1SD75P)
AX80 / AX81 / AX82 / AX40 / AX41 / AX42
AY80 / AY81 / AY82 / AY40 / AY41 / AY42
FX-1PG-E
FX-2N-1PG
FX2N-10GM/-20GM
Wbudowane w FX1N-MT / FX2N-MT
Tab. 7-3: Zestawienie modułów PLC
S000628C
Rys. 7-1: Konfiguracja systemu
I/O
AD75
CN1A
CN1B
CN2
Sterownik
Bateria
Serwowzmacniacz
Serwosilnik
itp.
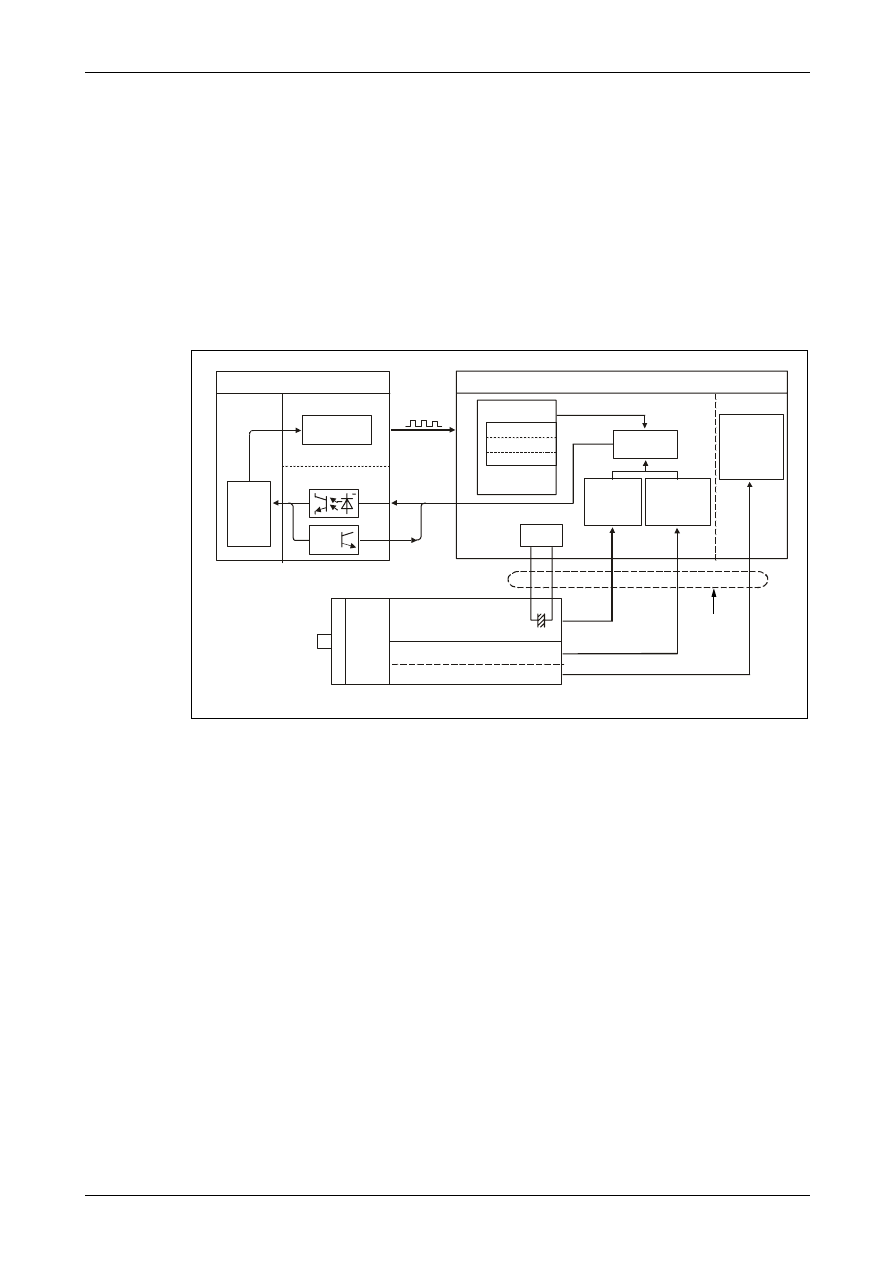
Uwagi ogólne
System pozycjonowania absolutnego
Serwonapędy MELSERVO MR-J2Super-A
7 - 3
7.1.4 Sposób
działania
Schemat blokowy
Enkoder serwosilnika zawiera czujnik, wykrywający położenie wirnika w ramach jednego obrotu
oraz licznik obrotów, zliczający ilość pełnych obrotów, z uwzględnieniem zmiany kierunku. Dzię-
ki użyciu podtrzymania bateryjnego aktualna pozycja jest wykrywana i zapamiętywana w sys-
temie pozycjonowania absolutnego niezależnie od stanu zasilania serwowzmacniacza i nad-
rzędnego sterownika ruchu. Tak więc, po jednorazowym wykonaniu bazowania osi przy insta-
lacji maszyny nie jest konieczny powrót do punktu zerowego po każdorazowym wyłączeniu lub
zaniku zasilania. Ponadto, dzięki podtrzymaniu zasilania w samym enkoderze przy użyciu su-
perkondensatora, dane są podtrzymywane także w przypadku uszkodzenia lub odłączenia ka-
bla łączącego enkoder z serwowzmacniaczem (czas podtrzymania danych podano w Tab. 7-1).
S000629C
Rys. 7-2: Schemat blokowy przepływu danych
Odczyt
pozycji
bieżącej
Moduł pozycjon.
CPU
Moduł I/O
Wyj-
ścia
Wej-
ścia
Pozycja
bieżąca
PLC
Impulsy
zadające
Dane punktu
zerowego
Pamięć EEPROM
Reg. prędkości
Reg. położenia
1X
Położenie w
ramach obrotu
LS
Ilość obrotów
Pamięć
nieulotna
Pozycja
bieżąca
MR-BAT
Bateria
Serwowzmacniacz
LSO
1XO
szybkie łącze
szeregowe
Serwosilnik
Kondensator
(Enkoder)
Czujnik położenia w ramach
jednego obrotu
Licznik pełnych obrotów
Sygnały faz A-, B-, Z
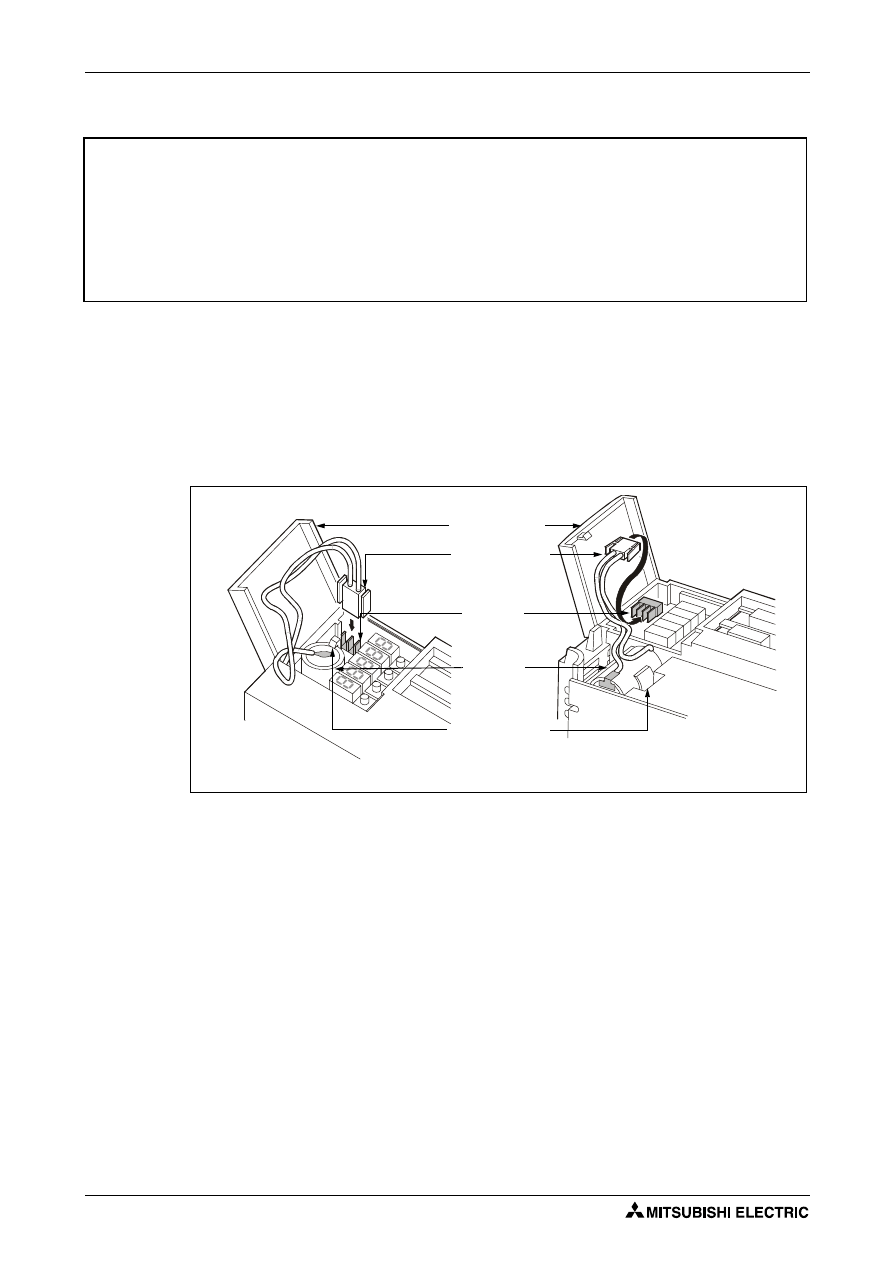
System pozycjonowania absolutnego
Uwagi ogólne
7 - 4
Podłączanie baterii
Podłączenie baterii należy wykonać w następujący sposób:
a Otwórz klapkę w górnej części pokrywy czołowej (dla modeli MR-J2S-200A i wyższych
należy wcześniej zdjąć pokrywę czołową).
b Umieść baterię w przeznaczonej do tego komorze.
c Podłącz wtyk baterii do gniazda CON1 tak, by chwyciły zatrzaski.
!
OSTRZEŻENIE:
Obwody elektroniczne serwowzmacniacza mogą ulec uszkodzone przez ładunki ele-
ktrostatyczne. Należy zawsze przestrzegać poniższych zasad bezpieczeństwa:
●
Zapewnić odprowadzenie ładunków elektrostatycznych z powierzchni ciała i stołu
roboczego przez ich uziemienie.
●
Nie dotykać gołymi rękami elementów przewodzących, jak styki i wyprowadzenia
elementów elektronicznych.
S000631C
Rys. 7-3: Podłączanie baterii w serwowzmacniaczach model MR-J2S-350A i niższych
Wtyk baterii
CON1
Bateria
Klapka
Komora baterii
MR-J2S-200A i MR-J2S-350A
MR-J2S-100A i niżej
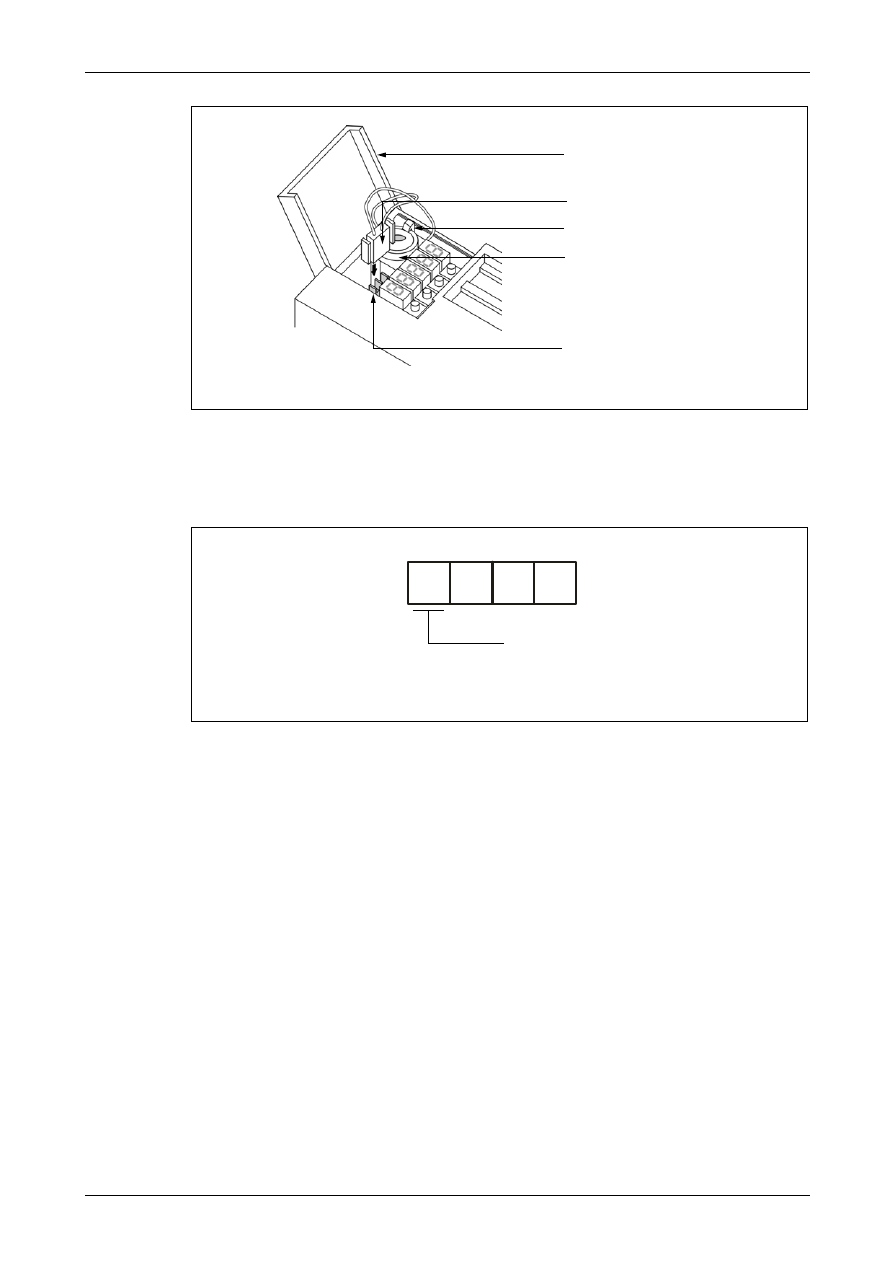
Uwagi ogólne
System pozycjonowania absolutnego
Serwonapędy MELSERVO MR-J2Super-A
7 - 5
Ustawienia parametrów
Wartość parametru Pr. 1 należy ustawić na 1, aby funkcja pozycjonowania absolutnego była
aktywna.
S000931T
Rys. 7-4: Podłączanie baterii w serwowzmacniaczach MR-J2S-500A i MR-J2S-700A
S000632C
Rys. 7-5: Parametr 1
CON1
Wtyk baterii
Bateria
Klapka
Komora baterii
MR-J2S-500A i MR-J2S-700A
1
System pozycjonowania:
0: System inkrementalny
1: System absolutny
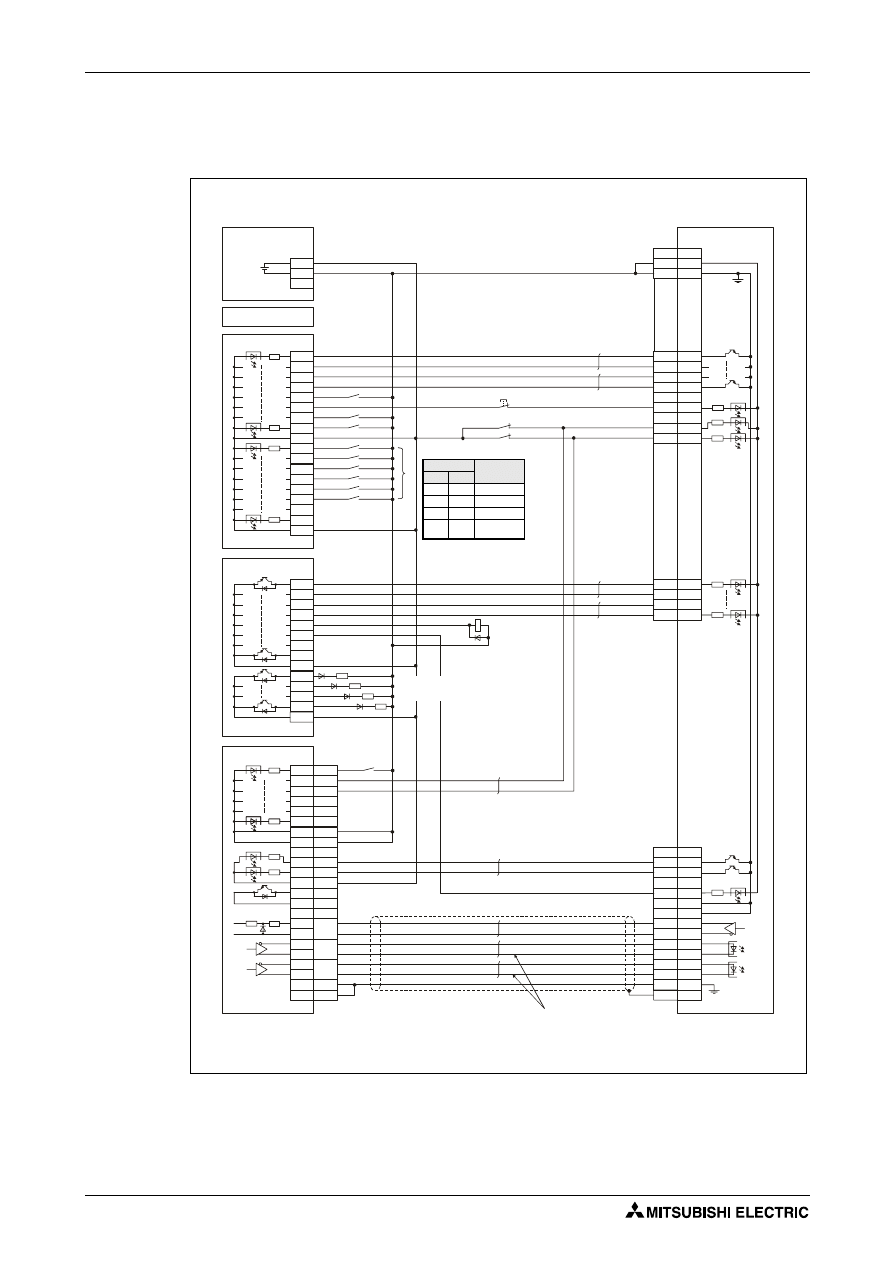
System pozycjonowania absolutnego
Uwagi ogólne
7 - 6
Przykład połączeń
Na poniższym rysunku przedstawiono połączenie modułu pozycjonującego MELSEC A1SD75
z serwowzmacniaczem w systemie pozycjonowania absolutnego.
S000906C
Rys. 7-6: Schemat połączeń przy logice source na wejściach i sink na wyjściach
+ 24
24G
FG
0
1
2
3
4
5
6
7
COM
8
9
A
B
C
D
E
F
COM
600mA
A1S62PN
A1SHCPU
A1SX80
A1SY80
A1SD75-P
0
1
2
3
4
5
6
7
COM1
8
9
A
B
COM2
11 DOG
12
FLS
13
RLS
14 STOP
15 CHG
16 START
35 COM
COM
COM
COM
36
+
+
7
RDY
8
26
INPS
5
CLEAR
23
+
24
25
21
3
22
4
19
20
+
PGO
PULSE-F
PULSE-R
PLSCOM
PLSCOM
13
10
COM
3
VDD
4
ABSbit0
ABSbit1
ABSbusy
19
6
18
ALM
3
VDD
15
EMG
3
VDD
16
LSP
17
LSN
SG
MR-J2S- A
CN1B
CN1A
5
SON
8
ABSM
9
ABSR
14
RES
9
COM
19
RD
18
INP
14
RES
8
CR
10
SG
20
SG
5
LZ
15
LZR
13
PG
3
PP
12
NG
2
NP
1
LG
Geh.
SD
Wybór trybu
Tryb pracy
I
II
ON
OFF
—
OFF
ON
JOG
ON
OFF Bazowanie
ON
ON
Pozycjono-
wanie
Reset alarmu
EMG
Servo-ON
Bazowanie
Tryb pracy I
Tryb pracy II
Start pozycjonowania
Stop pozycjonowania
JOG+
Jog
−
Alarm serwowzmacniacza
Błąd transmisji danych ABS
Błąd sumy kontrolnej ABS
Servo-ON
Tryb transmisji danych ABS
Gotowość do odbioru danych ABS
Reset alarmu
Dane ABS-bit 0 (pozycjonowanie wykonane)
Dane ABS-bit 1 (prędkość zero)
Gotowość do transmisji / Ograniczenie momentu
Alarm
Wyłącznik krańcowy - w prawo
Wyjście
Luzownik
Serwonapęd gotowy
Pozycjonowanie wykonane
Sygnał zbliżenia
A
C
D
F
B
E
B
Wyłącznik krańcowy - w lewo
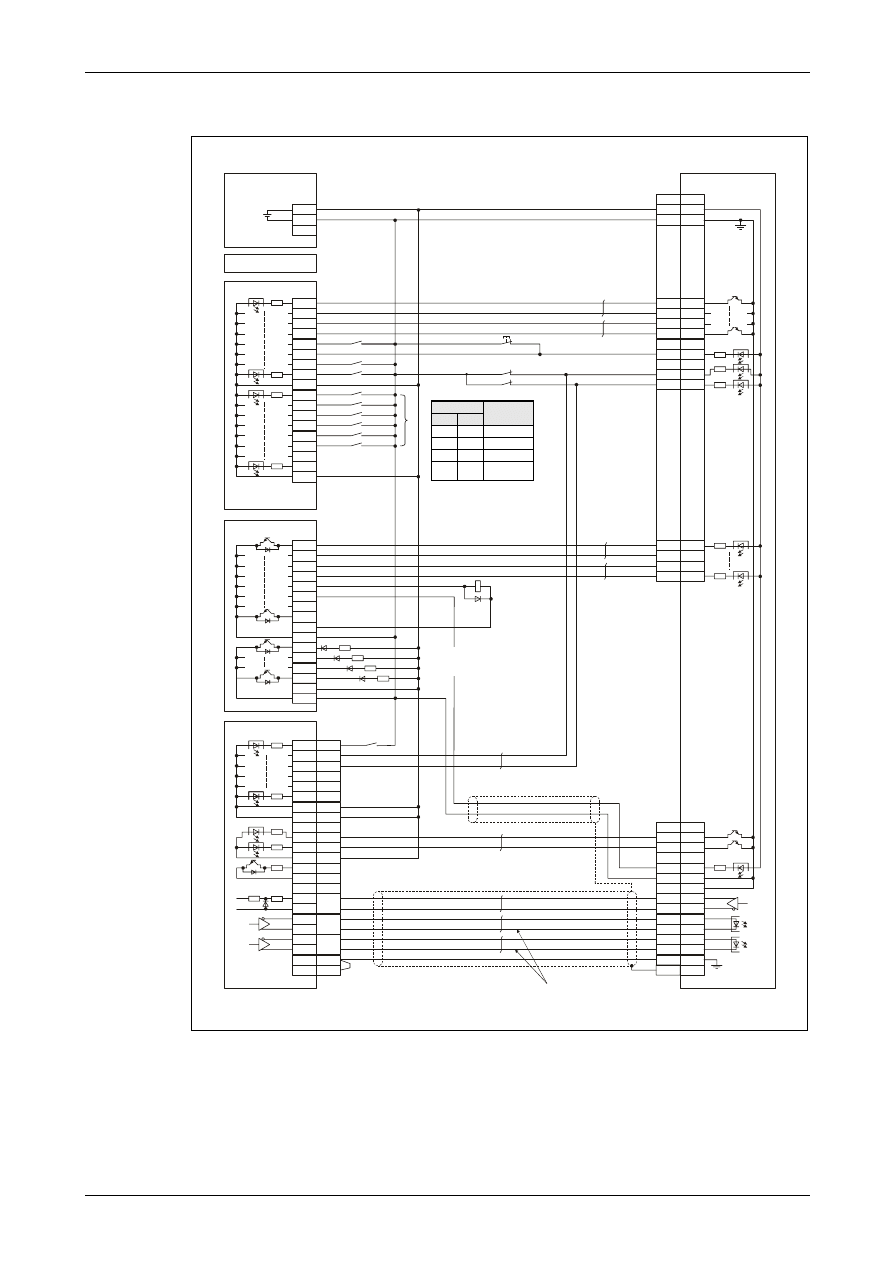
Uwagi ogólne
System pozycjonowania absolutnego
Serwonapędy MELSERVO MR-J2Super-A
7 - 7
S000907C
Rys. 7-7: Schemat połączeń przy logice sink na wejściach i wyjściach
+ 24
24G
FG
0
1
2
3
4
5
6
7
COM
8
9
A
B
C
D
E
F
COM
600mA
A1S62PN
A1SHCPU
A1SX40
A1SY40
COM1
COM2
A1SD75-P
0
1
2
3
4
5
6
7
12/24VDC
8
9
A
B
+
11 DOG
12
FLS
13
RLS
14 STOP
15 CHG
16 START
35 COM
COM
COM
COM
36
+
+
7
RDY
8
26
INPS
5
CLEAR
23
+
24
25
21
3
22
4
19
20
+
PGO
PULSE-F
PULSE-R
PLSCOM
PLSCOM
13
10
COM
3
VDD
4
ABSbit0
ABSbit1
ABSbusy
19
6
18
ALM
3
VDD
15
EMG
3
VDD
16
LSP
17
LSN
SG
MR-J2S- A
CN1B
CN1A
9
COM
19
RD
18
INP
14
RES
8
CR
10
SG
20
SG
5
LZ
15
LZR
13
PG
3
PP
12
NG
2
NP
1
LG
Geh.
SD
5
SON
8
ABSM
9
ABSR
14
RES
Reset alarmu
EMG
Servo-on
Bazowanie
Alarm serwonapędu
Błąd transmisji ABS
Błąd sumy kontrolnej ABS
Servo-ON
Tryb transmisji danych ABS
Gotowość do odbioru danych ABS
Reset alarmu
Dane ABS-bit 0 (pozycjonowanie wykonane)
Dane ABS-bit 1 (prędkość zero)
Gotowość do transmisji / Ograniczenie momentu
Alarm
Wyłącznik krańcowy w prawo
Wyjście
Luzownik
Serwonapęd gotowy
Pozycjonowanie wykonane
Sygnał zbliżenia
A
C
D
F
B
E
B
Wyłącznik krańcowy w lewo
Tryb pracy I
Tryb pracy II
Start pozycjonowania
Stop pozycjonowania
JOG+
Jog
−
Wybór trybu
Tryb pracy
I
II
OFF
OFF
—
OFF
ON
JOG
ON
OFF
Bazowanie
ON
ON
Pozycjonow-
anie

System pozycjonowania absolutnego
Uwagi ogólne
7 - 8
A Tylko dla systemu bazowania ze zderzakiem
Nie łączyć, gdy położenie punktu zerowego zadawane jest danymi.
B Jeżeli serwosilnik zostanie uruchomiony w obecności sygnału punktu zerowego, moduł
A1SD75 (AD75) wyśle sygnał kasowania licznika uchybu (CR). Stąd nie należy łączyć
wejścia kasującego (CR) serwowzmacniacza MR-J2S-A z modułem A1SD75 (AD75), lecz
z modułem wyjściowym PLC.
C Obwody przedstawiono przykładowo.
D Luzownik elektromagnetyczny powinien być sterowany z wyjścia sterownika PLC za pośred-
nictwem przekaźnika.
E Dla wejścia impulsowego należy stosować system ze sterownikiem linii różnicowej.
F Należy stosować system ze sterownikiem linii różnicowej. Niedopuszczalne jest stosowanie
systemu z otwartym kolektorem.
G W celu podwyższenia odporności na zakłócenia należy połączyć zaciski: LG serwowzmac-
niacza i COM modułu wyjść impulsowych.

Uwagi ogólne
System pozycjonowania absolutnego
Serwonapędy MELSERVO MR-J2Super-A
7 - 9
NOTATKI:

System pozycjonowania absolutnego
Uwagi ogólne
7 - 10
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 1
8
Wyposażenie i elementy opcjonalne
!!!
ZAGROŻENIE:
Przed przystąpieniem do podłączania lub odłączania dowolnego elementu opcjonal-
nego lub akcesoriów należy odłączyć zasilanie, odczekać co najmniej 10 minut,
upewnić się, że LED "Charge" nie świeci i sprawdzić brak napięcia, np. miernikiem.
Zaniedbanie tych czynności grozi porażeniem prądem elektrycznym.
!
OSTRZEŻENIE:
Dopuszcza się używanie wyłącznie wyposażenia i elementów opcjonalnych, wymie-
nionych w niniejszym podręczniku. Użycie innych elementów może być przyczyną
nieprawidłowej pracy, uszkodzenia lub pożaru.
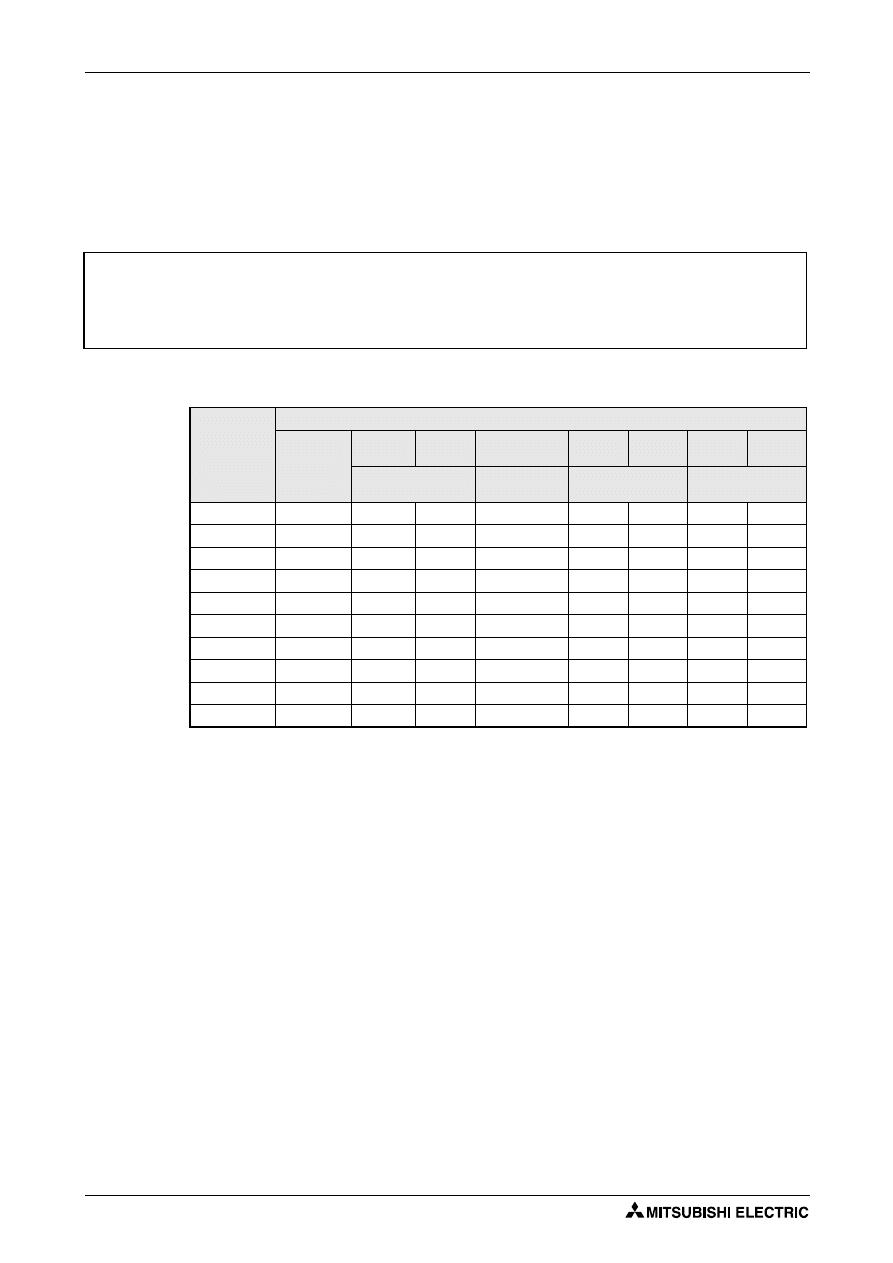
Wyposażenie i elementy opcjonalne
Elementy opcjonalne
8 - 2
8.1 Elementy
opcjonalne
8.1.1 Opornik
hamujący
Dopuszczalne kombinacje opornik hamujący/serwowzmacniacz
* Podane wartości mocy nie są tożsame z mocą znamionową opornika hamującego.
Dobór opornika hamującego
●
Uproszczona metoda doboru
W aplikacjach, gdzie przemieszczenie odbywa się w poziomie, opornik hamujący można do-
brać w następujący sposób:
Gdy serwosilnik jest hamowany regeneracyjnie od prędkości znamionowej do zatrzymania bez
obciążenia, dopuszczalna ilość cykli hamowania na minutę podana jest dla poszczególnych
typów oporników hamujących w tabelach Tab. 11-4 i Tab. 11-5, Rozdz. 11.2.2 .
!
OSTRZEŻENIE:
Dopuszcza się stosowanie WYŁĄCZNIE niżej przedstawionych zestawień opornika
hamującego z serwowzmacniaczem. Zastosowanie niewłaściwego opornika ha-
mującego może doprowadzić do przegrzania i zniszczenia lub pożaru urządzenia.
Serwowzma-
cniacz
Moc hamowania [W] *
Wbudowa-
ny opornik
hamujący
MR-RB032
(40
Ω)
MR-RB12
(40
Ω)
MR-RB32
(40
Ω)
MR-RB30
(13
Ω)
MR-RB50
(13
Ω)
MR-RB31
(6,7
Ω)
MR-RB51
(6,7
Ω)
MR-RFH75-40
(40
Ω)
MR-RFH220-40
(40
Ω)
MR-RFH400-13
(13
Ω)
MR-RFH400-6,7
(6,7
Ω)
MR-J2S-10A
—
30
—
—
—
—
—
—
MR-J2S-20A
10
30
100
—
—
—
—
—
MR-J2S-40A
10
30
100
—
—
—
—
—
MR-J2S-60A
10
30
100
—
—
—
—
—
MR-J2S-70A
20
30
100
300
—
—
—
—
MR-J2S-100A
20
30
100
300
—
—
—
—
MR-J2S-200A
100
—
—
—
300
500
—
—
MR-J2S-350A
100
—
—
—
300
500
—
—
MR-J2S-500A
130
—
—
—
300
500
—
—
MR-J2S-700A
170
—
—
—
—
—
300
500
Tab. 8-1: Dopuszczalne kombinacje opornik hamujący/serwowzmacniacz
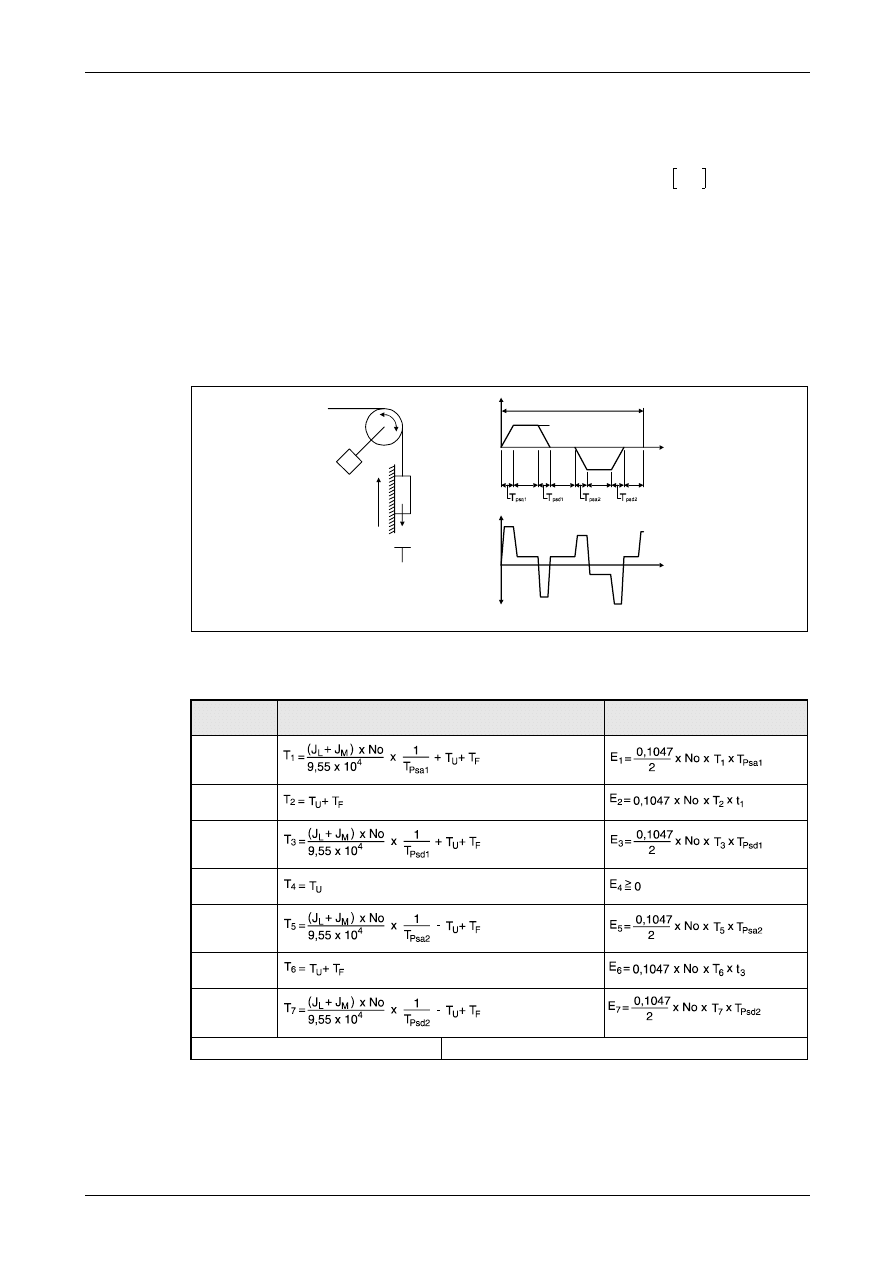
Elementy opcjonalne
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 3
Dla serwosilnika z obciążeniem dopuszczalna ilość cykli hamowania na minutę zmienia się
odpowiednio do momentu bezwładności obciążenia, i może być wyliczona wg wzoru:
m = Iloraz momentu bezwładności obciążenia do momentu bezwładności serwosilnika
Na podstawie dopuszczalnej ilości cykli hamowania można ocenić, czy zastosowanie danego
opornika jest możliwe. Wybierać należy spośród kombinacji, wymienionych w Tab. 8-1.
●
Obliczenie wartości energii regeneracji
Wzorów, zamieszczonych poniżej w Tab. 8-2 należy używać dla przypadków długotrwałej rege-
neracji w trakcie ruchów w pionie, a także w innych przypadkach gdy konieczna jest dokładna
analiza i wybór jednostki hamującej.
S000634C
Rys. 8-1: Ilustracja energii regeneracji
Energia re-
generacji
Moment obciążenia serwosilnika [Nm]
Energia [J]
1
2
3
4, 8
5
6
7
Moment obciążenia
Wartość energii regeneracji
Tab. 8-2: Wzory do obliczania energii regeneracji
Dopuszczalna ilość cykli
hamowania na minutę
Ilość cykli bez obciążenia (patrz Rozdz. 11.2
(
) )
m + 1
(
)
-----------------------------------------------------------------------------------------------------------------------------
Prędkość znamionowa
Predkosc
------------------------------------------------------------
2
×
cykli
min
-------------
=
M
T
F
T
U
t1
t2
t3
t4
No
(+)
( )
−
tf (1 cykl)
Pr
ędko
ść
se
rw
os
iln
ika
Mo
men
t ob
r.
regeneracja
napędzanie
W górę
W dół
Czas
Czas
N
iez
ró
wn
ow
aż
o
ny mo
me
nt
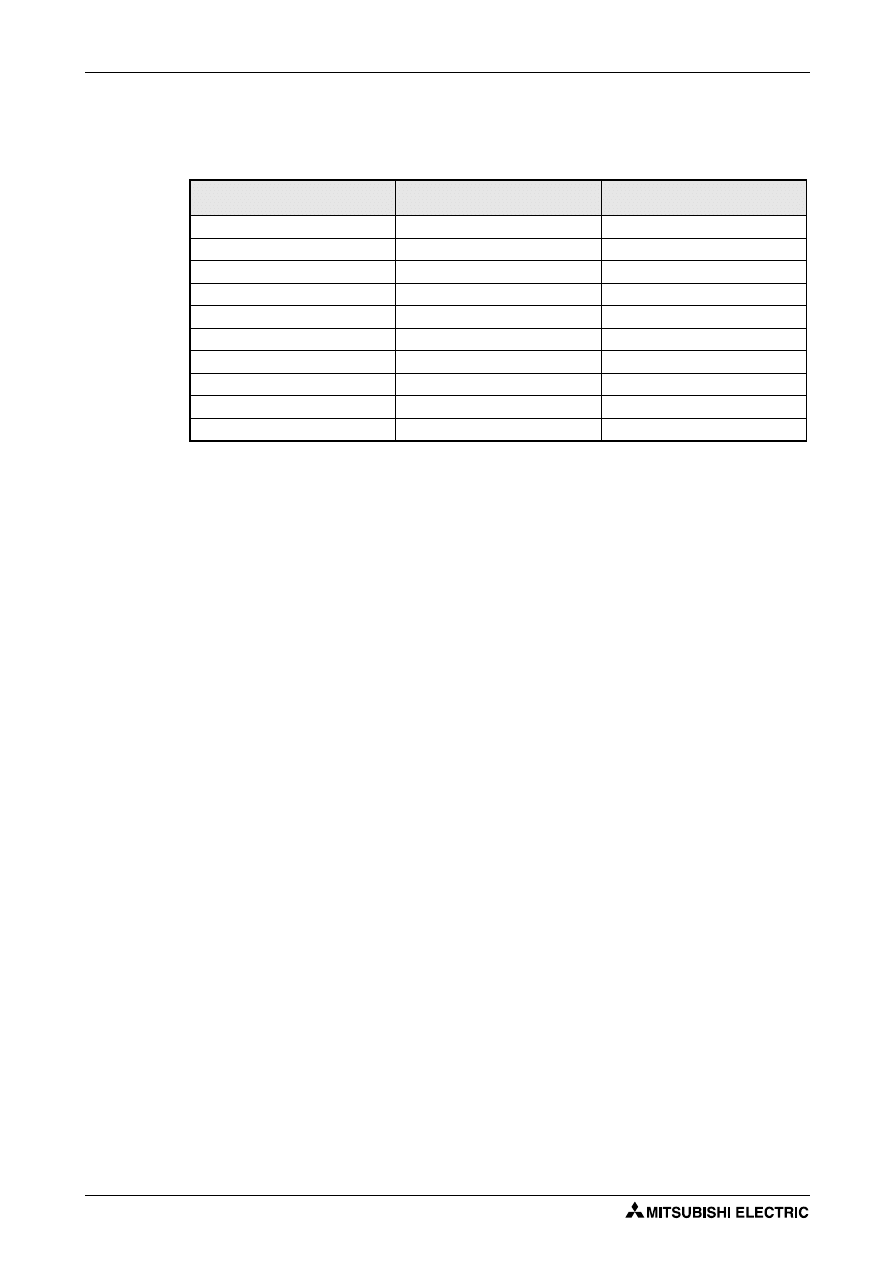
Wyposażenie i elementy opcjonalne
Elementy opcjonalne
8 - 4
●
Moc tracona podczas regeneracji w serwosilniku, pracującym w trybie prądnicowym i w
serwowzmacniaczu
Sprawność przy pracy prądnicowej (
η
): Łączna sprawność serwowzmacniacza i serwosilnika
podczas hamowania z momentem znamionowym przy prędkości zamionowej.
Ponieważ sprawność zmienia się w zależności od prędkości i momentu obrotowego, należy
przyjąć zapas bezpieczeństwa o wartości 10 %.
Energia w kondensatorach(E
C
): Energia, którą mogą zmagazynować kondensatory w stopniu
DC serwowzmacniacza.
Energia E
R
, która musi zostać wytracona w oporniku hamującym, wynosi więc:
E
R
[J] =
η
x E
S
− E
C
Średnią wartość mocy traconej w oporniku hamującym podczas cyklu hamowania można
wyznaczyć na podstawie wartości energii E
R
i czasu trwania jednego cyklu: tf [s]:
P
R
[W] = E
R
/tf
Serwowzmacniacz
Sprawność serwosilnika [%]
przy pracy prądnicowej
Energia w kondensatorach [J]
MR-J2S-10A
55
9
MR-J2S-20A
70
9
MR-J2S-40A
85
11
MR-J2S-60A
85
11
MR-J2S-70A
80
18
MR-J2S-100A
80
18
MR-J2S-200A
85
40
MR-J2S-350A
85
40
MR-J2S-500A
90
45
MR-J2S-700A
90
70
Tab. 8-3: Energia wytracana w serwowzmacniaczu i serwosilniku
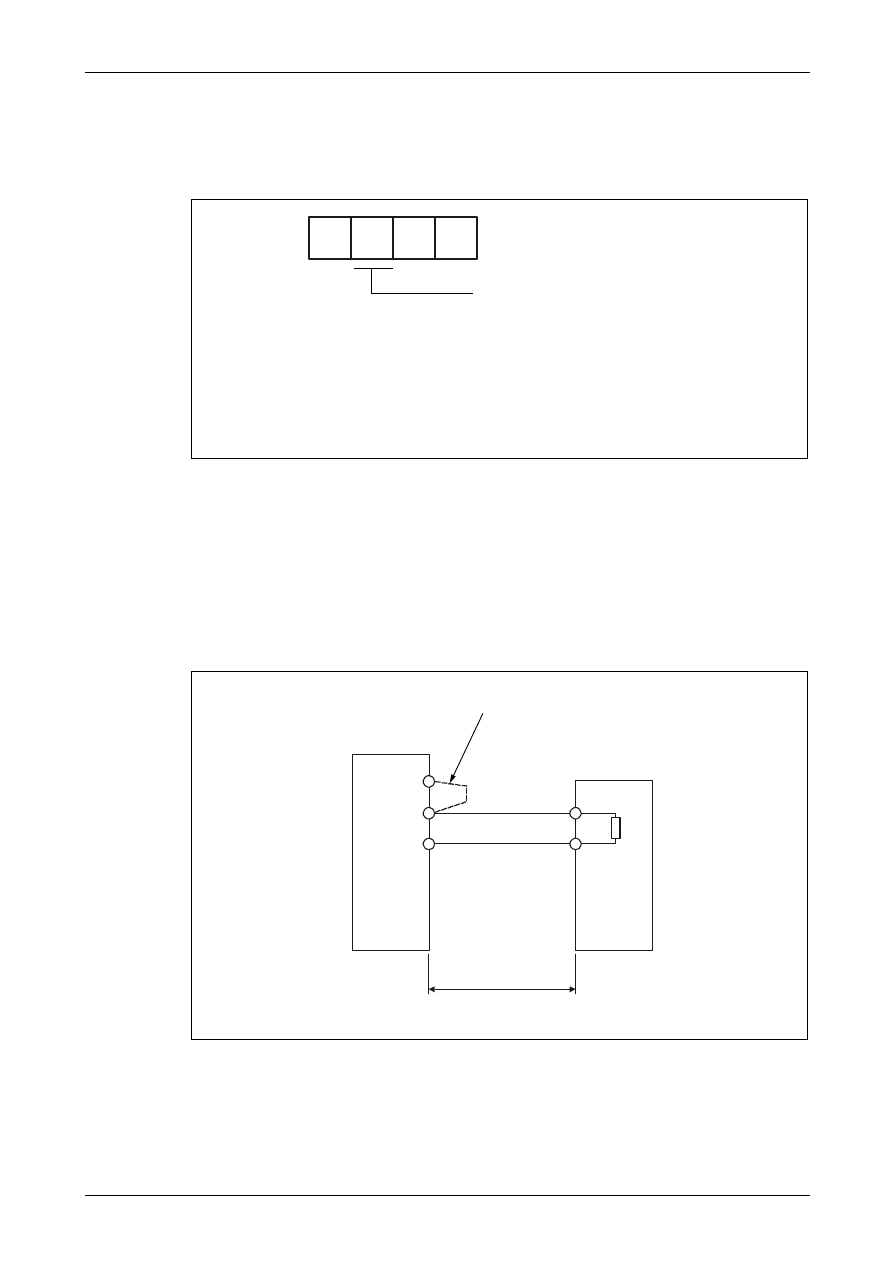
Elementy opcjonalne
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 5
●
Podłączanie zewnętrznego opornika hamującego
W celu użycia zewnętrznego opornika hamującego należy odłączyć wbudowany opornik ha-
mujący i podłączyc opornik zewnętrzny do zacisków P-C. Ponadto, przy pomocy parametru Pr.
0 należy określić podłączony opornik.
Opornik hamujacy może się w czasie pracy nagrzewać do temperatury około 100 °C. Należy
sprawdzić, czy zapewnione są odpowiednie warunki dla rozproszenia ciepła, miejsce i pozycja
instalacji opornika. Do podłączenia nalezy użyć kabli w niepalnej izolacji i nie dopuszczać do
stykania się kabla z obudową opornika. Parę kabli należy skręcić, a ich długość nie może
przekraczać 5 m.
●
Serwowzmacniacz MR-J2S-350A i niżej:
Należy odłączyć wbudowany opornik hamujący poprzez usunięcie zwory między zaciskami P-
D, a następnie podłączyć zewnętrzny opornik do zacisków P-C.
S000635C
Rys. 8-2: Wartość parametru Pr. 0
S000636C
Rys. 8-3: Podłączenie zewnętrznego opornika hamującego do serwowzmacniaczy MR-J2S-
350A i niższych
Wybór opcjonalnego opornika hamującego:
0: brak
1: FR-RC, FR-BU
2: MR-RB032/MR-RFH75-40
3: MR-RB12/MR-RFH75-40
4: MR-RB32/MR-RFH220-40
5: MR-RB30/MR-RFH400-13
6: MR-RB50/MR-RFH400-13
8: MR-RB31/MR-RFH400-6,7
9: MR-RB51/MR-RFH400-6,7
D
P
C
P
C
max. 5 m
Serwowzmacniacz
Zewnętrzny opornik
hamujący (opcja)
Usunąć zworę!
MR-J2S-350A i poniżej
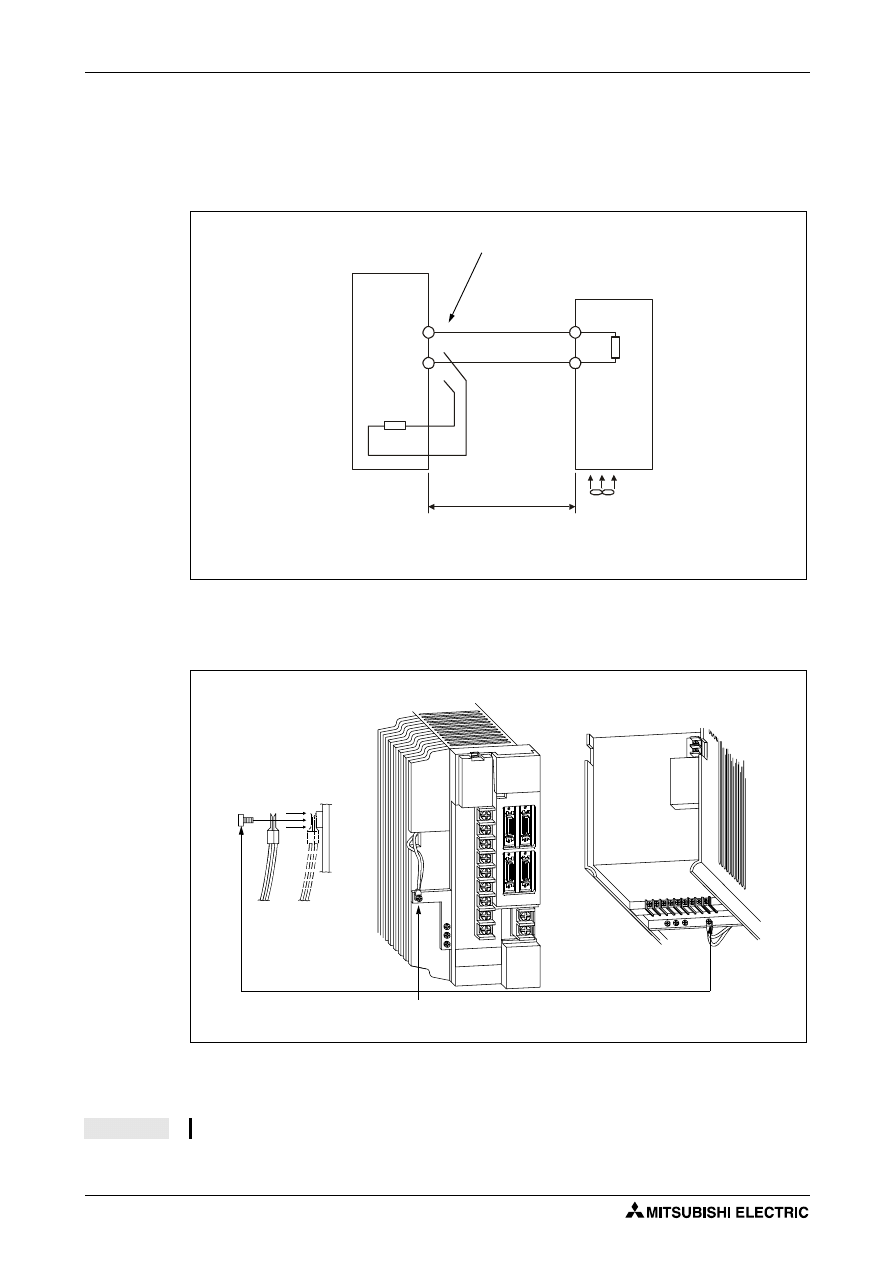
Wyposażenie i elementy opcjonalne
Elementy opcjonalne
8 - 6
●
Serwowzmacniacz MR-J2S-500A i MR-J2S-700A:
Należy odłączyć wbudowany opornik hamujący od zacisków P-C i na to samo miejsce
podłączyć zewnętrzny opornik (patrz Rys. 8-4). Odłączone końcówki wbudowanego opornika
należy zabezpieczyć przez ich zamocowanie wkrętem do obudowy serwowzmacniacza (patrz
Rys. 8-5).
S000928C
Rys. 8-4: Podłączenie zewnętrznego opornika hamującego do serwowzmacniaczyMR-J2S-
500A i MR-J2S-700A
S000930C
Rys. 8-5: Mocowanie odłączonych kabli wbudowanego opornika hamującego
UWAGA
Wymiary zewnętrznych oporników hamujących znajdują się w Rozdz. 13.
P
C
P
C
max. 5 m
x
x
Serwowzmacniacz
Opcjonalny opornik
hamujący
Odłączyć wbudowany opornik hamujący!
MR-J2S-500A lub MR-J2S-700A
Wkręt mocujący
MR-J2S-500A
MR-J2S-700A
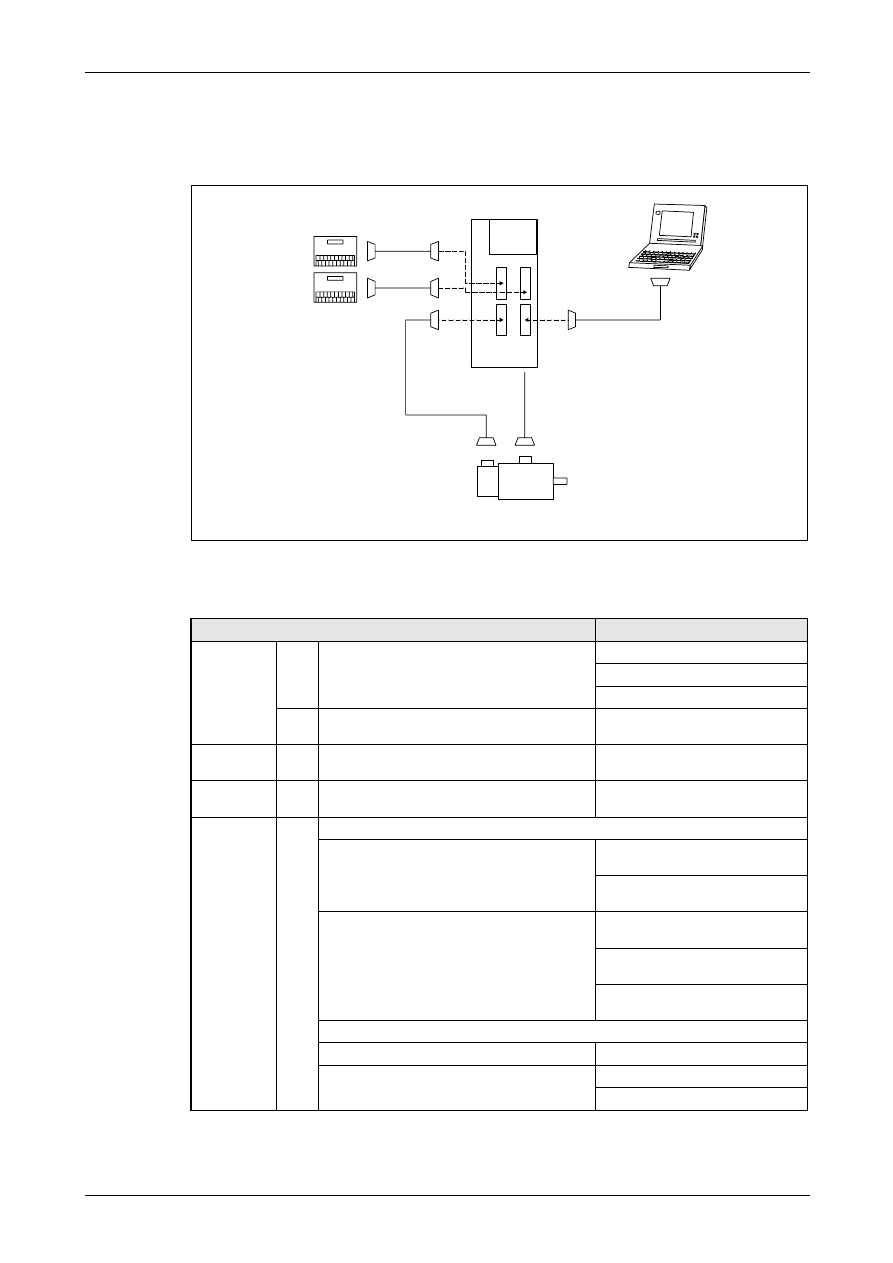
Elementy opcjonalne
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 7
8.1.2 Kable
połączeniowe
Do łączenia elementów serwonapędu należy używać niżej podanych kabli.
S001187C
Rys. 8-6: Połączenia
Produkt
Oznaczenie
Do CN1A, B
1
Listwa zaciskowa
MR-TB20
MR-TB20-S
MR-TB20-C
2
Złącze pośrednie
MR-J2TBLmM
m - długość w metrach: 0,5, 1m
Do CN3
3
Kabel komunikacyjny serwowzmacniacz - PC
MR-CPCATCBL3M
Długość: 3 m
Do CN1A, B
i CN3
Zestaw 2 wtyków do samodzielnego wykonania
kabla
MR-J2CN1
Do
CN2
4
Kabel enkodera, w zależności od używanego serwosilnika:
dla HC-KFS, HC-MFS
MR-JCCBLmM-L (standard)
m - długość w m : 2, 5, 10, 20, 30 m
MR-JCCBLmM-H (elastyczny)
m - długość w m: 2, 5, 10, 20, 30 m
dla HC-SFS, HC-RFS
MR-JHSCBLmM-L (Standard)
m - długość w m: 2, 5, 10, 20, 30 m
MR-JHSCBLmM-H (hochflexibel)
m - długość w m: 2, 5, 10, 20, 30 m
MR-ENCBLmM-H
m - długość w m: 2, 5, 10, 20, 30 m
Zestawy wtyków do samodzielnego wykonania kabla:
dla HC-KFS, HC-MFS
MR-J2CNM
dla HC-SFS, HC-RFS
MR-J2CNS
MR-ENCNS (IP67)
Tab. 8-4: Przegląd kabli i elementów złącznych (1)
CN1A
CN2
CN1B
CN3
%
%
'
(
&
$
$
Serwowzmacniacz
Komputer osobisty,
panel operatorski itd.
Serwosilnik
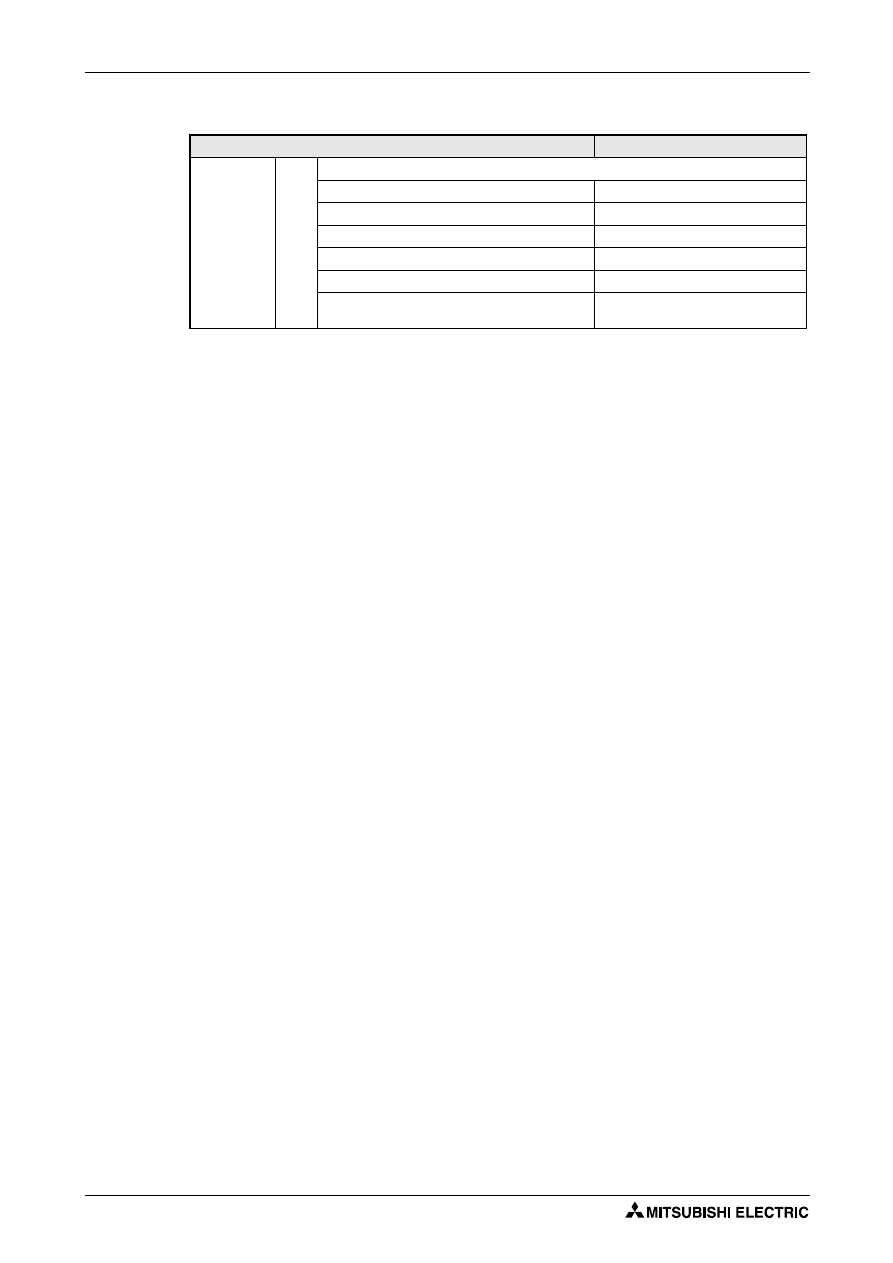
Wyposażenie i elementy opcjonalne
Elementy opcjonalne
8 - 8
Produkt
Oznaczenie
5
Wtyk połączeniowy zasilania silnika i luzownika
dla HC-KFS, HC-MFS
MR-PWCNK1
dla HC-KFS, HC-MFS z luzownikiem
MR-PWCNK2
dla HC-SFS52, 102, 152, HC-RFS103, 153, 203
MR-PWCNS1
dla HC-SFS202, 352, 502, HC-RFS353, 503
MR-PWCNS2
dla HC-SFS702
MR-PWCNS3
Wtyk luzownika dla HC-SFS202B, 352B, 502B,
702B
MR-BKCN
Tab. 8-4: Przegląd kabli i elementów złącznych (2)
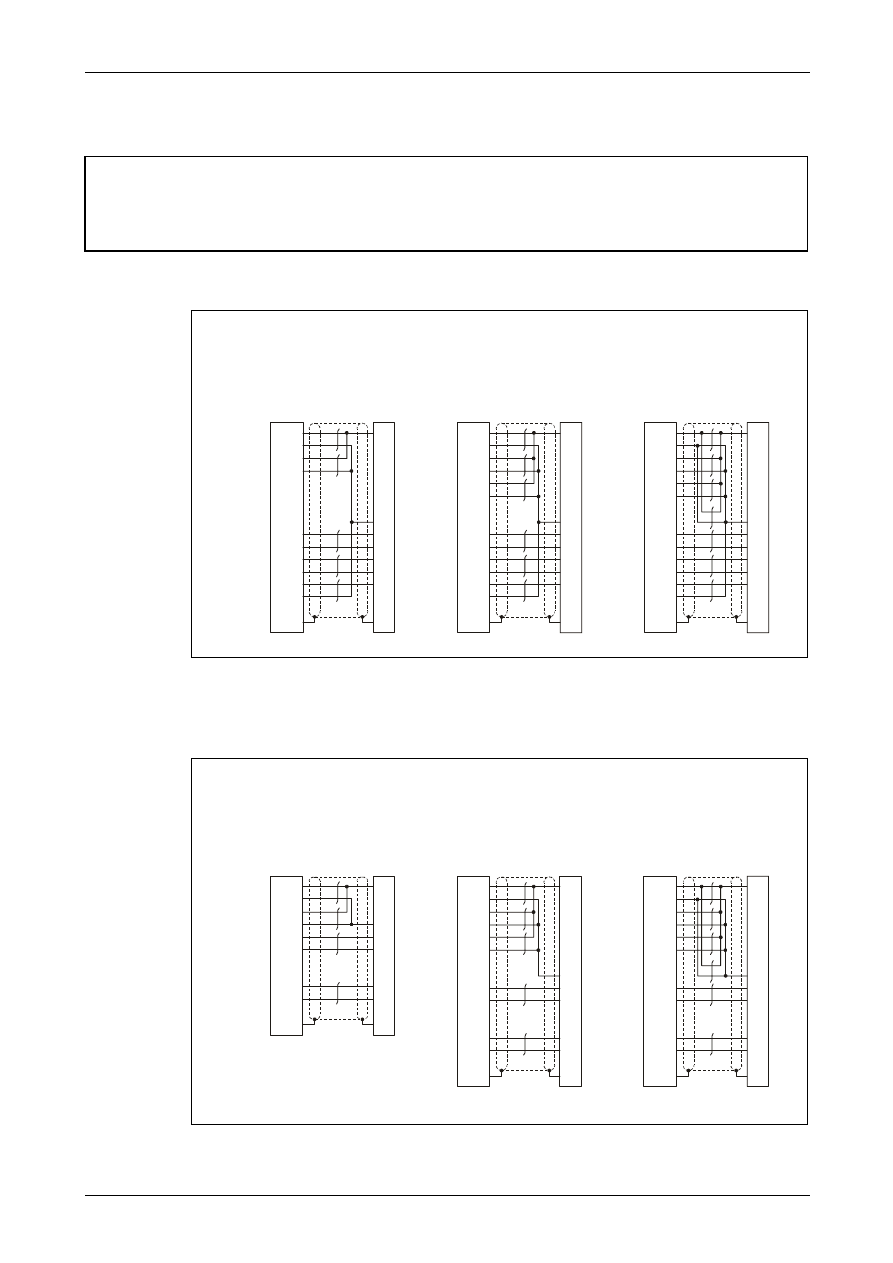
Elementy opcjonalne
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 9
Rozkład połączeń w kablu enkodera
Kabel enkodera dla serwosilników serii HC-KFS i HC-MFS
Kabel enkodera dla serwosilników serii HC-SFS i HC-RFS
!
OSTRZEŻENIE:
Należy zachować ostrożność przy wykonaniu połączeń. Błędne podłączenie może
spowodować nieprawidłową pracę lub uszkodzenie serwonapędu!
S000645C
Rys. 8-7: Rozkład połączeń w kablu enkodera dla serwosilników serii HC-KFS i HC-MFS
S000647C
Rys. 8-8: Rozkład połączeń w kablu enkodera dla serwosilników serii HC-SFS i HC-RFS
7
11
20
12
18
2
LG
8
1
2
4
5
3
1
LG
9
P5
LG
P5
LG
P5
LG
LG
LG
MR
MRR
MD
MDR
BAT
LG
LG
SD
19
11
20
12
18
2
LG
LG
7
17
6
16
9
1
LG
Geh.
7
11
20
12
18
2
LG
8
1
2
4
5
3
1
LG
9
P5
LG
P5
LG
P5
LG
LG
LG
MR
MRR
MD
MDR
BAT
LG
LG
SD
19
11
20
12
18
2
LG
LG
7
17
6
16
9
1
LG
Geh.
7
11
20
12
18
2
LG
8
1
2
4
5
3
1
LG
9
P5
LG
P5
LG
P5
LG
LG
LG
MR
MRR
MD
MDR
BAT
LG
LG
SD
19
11
20
12
18
2
LG
LG
7
17
6
16
9
1
LG
Geh.
MR-JCCBL2M-L
MR-JCCBL5M-L
MR-JCCBL2M-H
MR-JCCBL5M-H
MR-JCCBL10M-L
MR-JCCBL20M-L
MR-JCCBL30M-L
MR-JCCBL10M-H
MR-JCCBL20M-H
MR-JCCBL30M-H
Serwowzmacniacz
Serwowzmacniacz
Serwowzmacniacz
Enkoder
Enkoder
Enkoder
P5
LG
P5
LG
MR
MRR
P5
LG
BAT
19
11
20
12
7
17
18
2
9
S
R
C
R
C
D
5
3
F
N
SD
Geh.
LG
1
G
S
11
20
R
18
2
LG
R
C
D
4
5
F
G
LG
N
P5
LG
P5
LG
P5
LG
LG
LG
MR
MRR
MD
MDR
BAT
LG
LG
SD
19
11
20
12
18
2
LG
LG
7
17
6
16
9
1
LG
Geh.
S
11
20
12
18
2
LG
R
C
D
4
5
F
G
LG
N
P5
LG
P5
LG
P5
LG
LG
LG
MR
MRR
MD
MDR
BAT
LG
LG
SD
19
11
20
12
18
2
LG
LG
7
17
6
16
9
1
LG
Geh.
MR-JHSCBL2M-L
MR-JHSCBL5M-L
MR-JHSCBL2M-H
MR-JHSCBL5M-H
MR-ENCBL2M-H
MR-ENCBL5M-H
MR-JHSCBL10M-L
MR-JHSCBL20M-L
MR-JHSCBL30M-L
Max. 10 m
10–50 m
MR-JHSCBL10M-H
MR-JHSCBL20M-H
MR-JHSCBL30M-H
10–50 m
Serwowzmacniacz
Serwowzmacniacz
Serwowzmacniacz
Enkoder
Enkoder
Enkoder
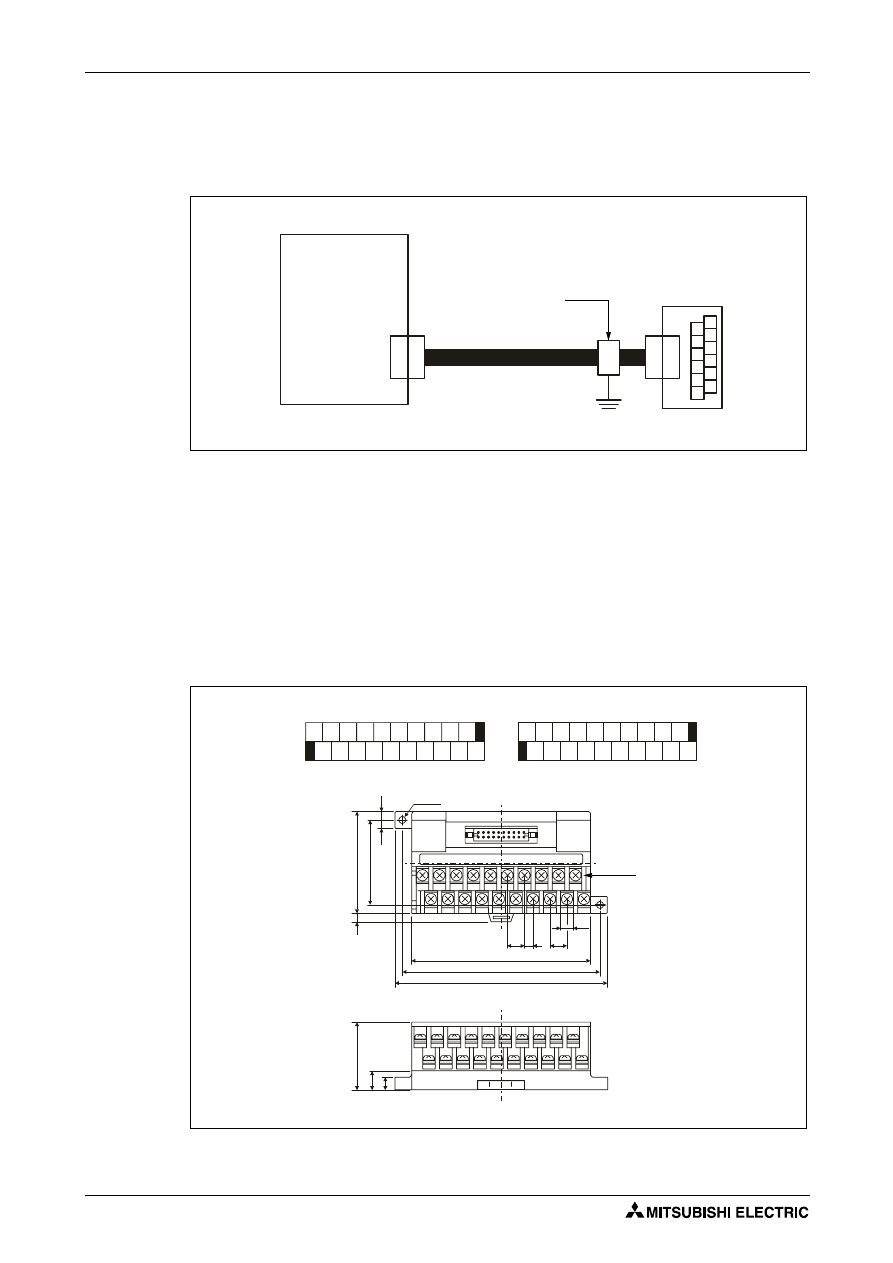
Wyposażenie i elementy opcjonalne
Elementy opcjonalne
8 - 10
8.1.3 Rozkład styków w listwach zaciskowych
Listwy zaciskowe typu MR-TB20 należy używać wyłącznie ze złączami pośrednimi
MR-J2TBL05M/1M.
Uziemienie ekranu kabla odbywa się normalnie przez jego połączenie ze stykiem SD. Dodat-
kowo efekt ekranowania można poprawić przez bezpośrednie połączenie ekranu z płytą mon-
tażową za pomocą standardowej obejmy kablowej.
Wraz z listwą MR-TB20 dostarczane są trzy etykiety z opisem rozkładu styków. Należy używać
dwu z nich, przeznaczonych dla serii MR-J2S-A (MR-J2-A). Są one przeznzczone dla trybu reg-
ulacji położenia. Przy zmianie przypisania sygnałów za pomocą parametrów Pr. 43 do 48 oraz
przy pracy w innych trybach należy wykorzystać dane z Tab. 8-5 oraz Rozdz. 3.1.3 do stworze-
nia odpowiedniego opisu etykiet.
S000649C
Rys. 8-9: Przykład zastosowania
S000650C
Rys. 8-10: Rozkład zacisków i wymiary
Serwowzmacniacz
Obejma
CN1A
lub
CN1B
Kabel połączeniowy
MR-J2TBL05M
Listwa zaciskowa
MR-TB20
LG PP
LZ
LB COM OPC PG LZR LBR RD
10
11
12
13
14
15
16
17
18
19
NP P15R LA CR SG NG OP LAR INP SD
0
1
2
3
4
5
6
7
8
9
CN1A
LG VDD SON
TL P15R COMEMG LSN ZSP
10
11
12
13
14
15
16
17
18
19
DO1 TLC PC SG TLA RES LSP ALM SD
0
1
2
3
4
5
6
7
8
9
CN1B
10
11
12
13
14
15
16
17
17
18
19
9
8
7
6
5
4
3
2
1
0
2 – ř 4,5
5
4,5
50
60
4
8,2
10
10
107
117
126
40
,5
11
7
5
Jedn.: mm
M3,5
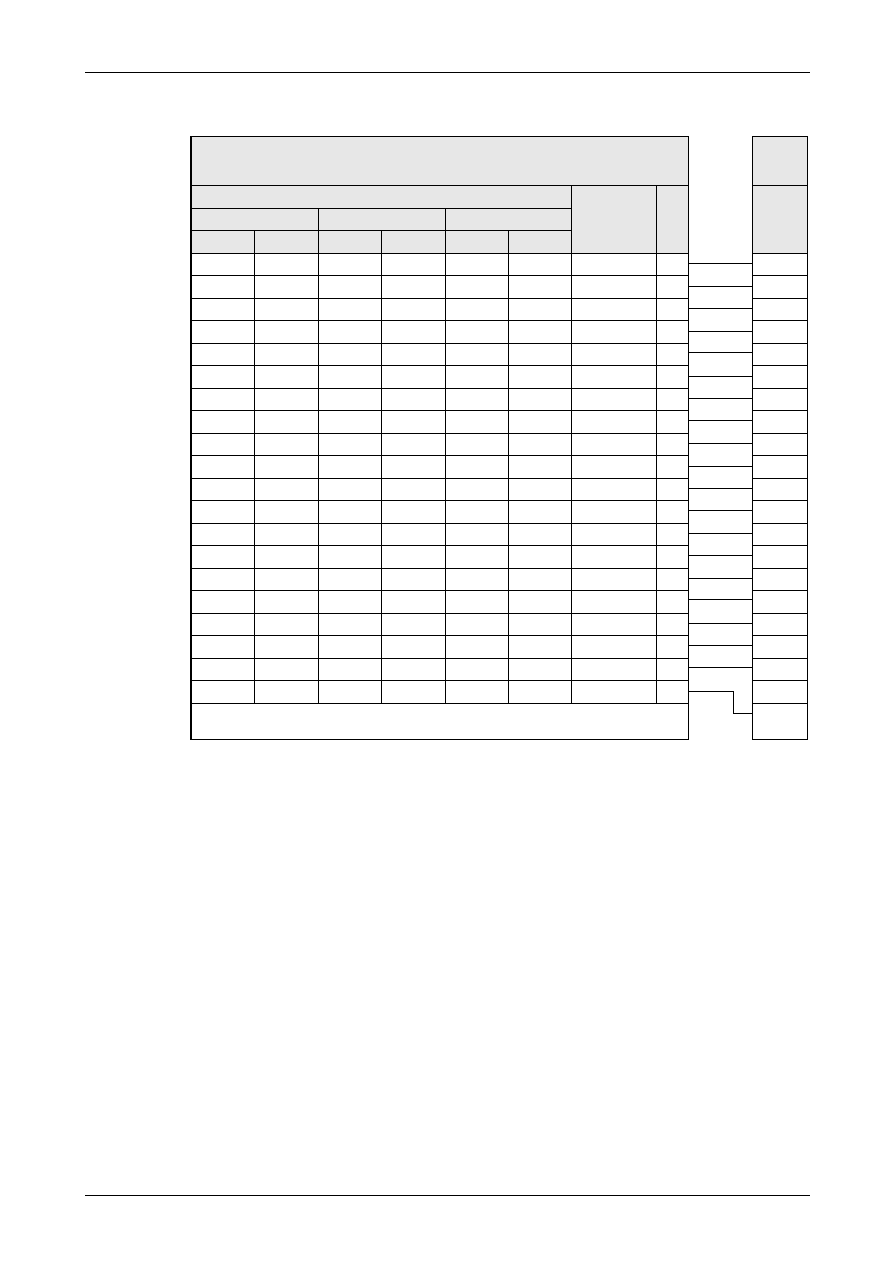
Elementy opcjonalne
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 11
Złącze pośrednie MR-J2S – MR-TB20
a
Etykieta dostarczona z listwą jest odpowiednia dla trybu regulacji położenia. Przy zmianie
trybu regulacji należy użyć dostarczonych dodatkowo naklejek do zmiany opisu sygnałów.
Po stronie listwy MR-TB20
Po stro-
nie
CN1A/B
Etykieta listwy zaciskowej
a
Nr zacisku na
listwie
Nr
sty-
ku
Nr styku
Regulacja położenia Regulacja prędkości Regulacja momentu
Dla CN1A Dla CN1B Dla CN1A Dla CN1B Dla CN1A Dla CN1B
LG
LG
LG
LG
LG
LG
10
B1
1
NP
VC
—
VC
—
VLA
0
A1
2
PP
VDD
—
VDD
—
VDD
11
B2
3
P15R
DO1
P15R
DO1
P15R
DO1
1
A2
4
LZ
SON
LZ
SON
LZ
SON
12
B3
5
LA
TLC
LA
TLC
LA
VLC
2
A3
6
LB
—
LB
SP2
LB
SP2
13
B4
7
CR
PC
SP1
ST1
SP1
RS2
3
A4
8
COM
TL
COM
ST2
COM
RS1
14
B5
9
SG
SG
SG
SG
SG
SG
4
A5
10
OPC
P15R
—
P15R
—
P15R
15
B6
11
NG
TLA
—
TLA
—
TC
5
A6
12
PG
COM
—
COM
—
COM
16
B7
13
OP
RES
OP
RES
OP
RES
6
A7
14
LZR
EMG
LZR
EMG
LZR
EMG
17
B8
15
LAR
LSP
LAR
LSP
LAR
—
7
A8
16
LBR
LSN
LBR
LSN
LBR
—
18
B9
17
INP
ALM
SA
ALM
—
ALM
8
A9
18
RD
ZSP
RD
ZSP
RD
ZSP
19
B10
19
SD
SD
SD
SD
SD
SD
9
A10
20
Obu-
dowa
Tab. 8-5: Złącze pośrednie MR-J2TBL05M
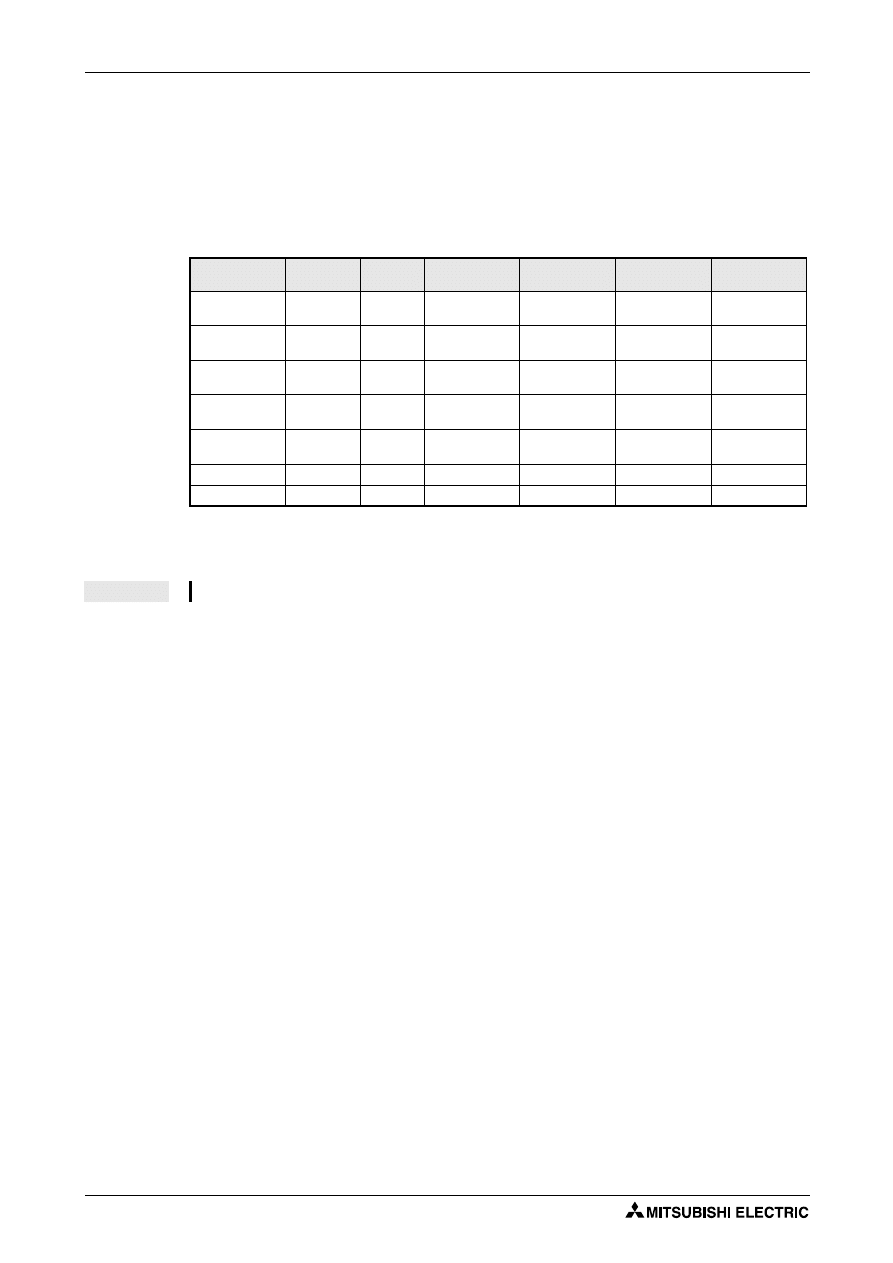
Wyposażenie i elementy opcjonalne
Wyposażenie dodatkowe
8 - 12
8.2 Wyposażenie dodatkowe
8.2.1 Transformatory
Napięcie pierwotne: 3 x 400 V
Napięcie wtórne: 3 x 230 V
Typ
Moc
ED
Prąd wejściowy Prąd wyjściowy
Przekrój
zacisków
Moc strat
MT 01364023/
MT 1,3-60
1,3 kVA
60 %
2,02 A
2,69 A
3,26 A
4,27 A
2,5 mm
2
2,5 mm
2
103 W
167 W
MT 01764023/
MT 1,7-60
1,7 kVA
60 %
2,61 A
3,89 A
4,27 A
6,28 A
2,5 mm
2
2,5 mm
2
110 W
199 W
MT 02564023/
MT 2,5-60
2,5 kVA
60 %
3,80 A
5,42 A
6,28 A
8,78 A
2,5 mm
2
2,5 mm
2
155 W
282 W
MT 03564023/
MT 3,5-60
5,5 kVA
60 %
5,30 A
8,41 A
8,78 A
13,80 A
4 mm
2
4 mm
2
170 W
330 W
MT 05564023/
MT 5,5-60
5,5 kVA
60 %
8,26 A
13,80 A
4 mm
2
243 W
MT 7,5-60
7,5 kVA
60 %
11,25 A
18,82 A
4 mm
2
190 W
MT 11-60
11 kVA
60 %
16,40 A
27,61 A
4 mm
2
280 W
Tab. 8-6: Autotransformatory
UWAGA
Wymiary transformatorów podano w Rozdz. 13.

Wyposażenie dodatkowe
Wyposażenie i elementy opcjonalne
Serwonapędy MELSERVO MR-J2-Super-A
8 - 13
NOTATKI:

Wyposażenie i elementy opcjonalne
Wyposażenie dodatkowe
8 - 14
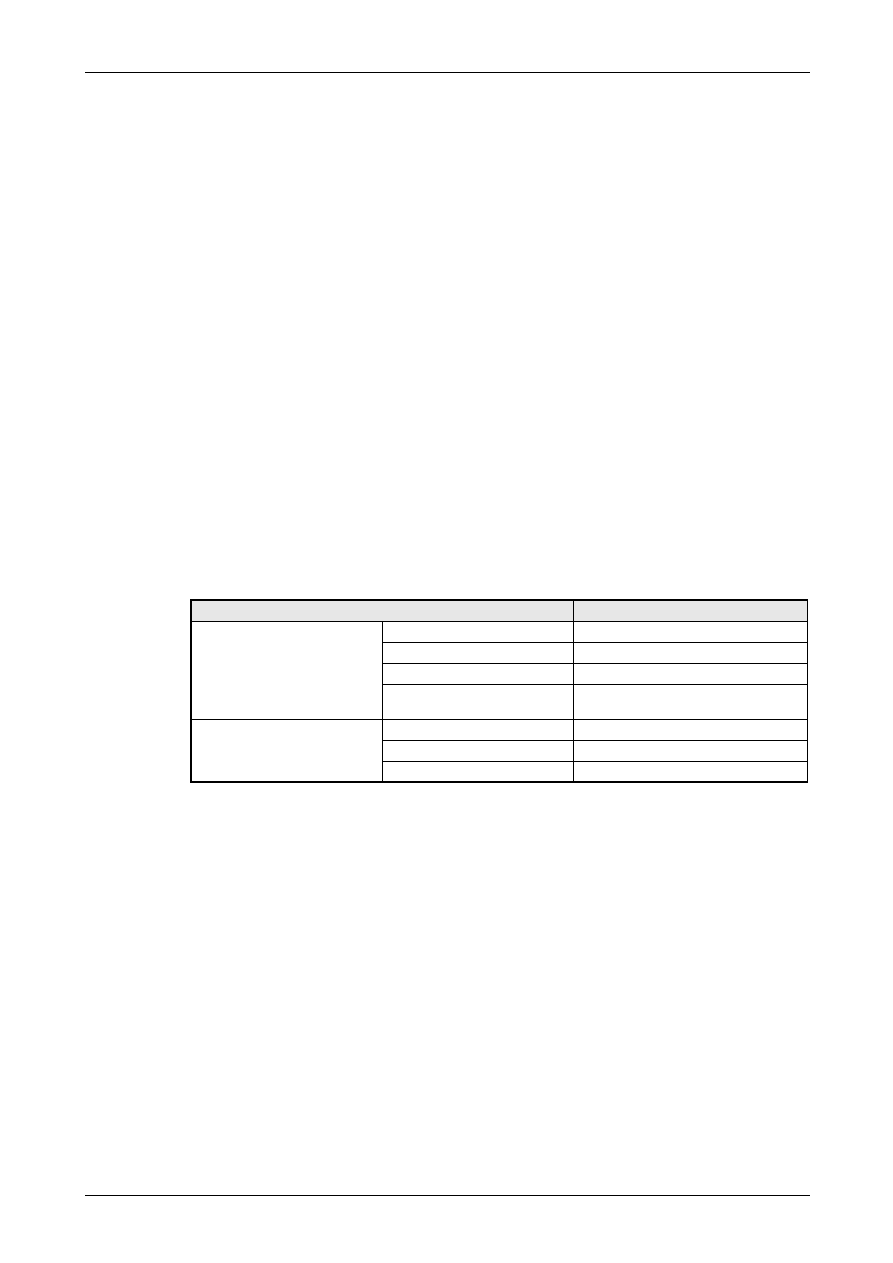
Przeglądy
Konserwacja i przeglądy
Serwonapędy MELSERVO MR-J2-Super-A
9 - 1
9
Konserwacja i przeglądy
9.1 Przeglądy
Poniższe punkty powinny być regularnie sprawdzane:
a Sprawdź, czy wkręty zacisków nie obluzowały się, i w miarę potrzeby dokręć je.
b Sprawdź, czy z silnika, w szczególności z łożysk i luzownika nie dochodzą niezwykłe
dźwięki, podwyższony hałas itp.
c Sprawdź brak uszkodzeń kabli i przewodów (nacięcia, zadrapania, zagniecenia itp.).
d Okresowo sprawdź funkcjonowanie poszczególnych elementów serwonapędu.
e Sprawdź stan wału serwosilnika oraz mocowanie serwosilnika do podstawy.
9.2 Czas
życia
W poniższej tabeli podano orientacyjne odstępy czasowe, w których powinno się wymieniać po-
dane podzespoły. Podany czas życia nie jest gwarantowany i dotyczy przeciętnych warunków
eksploatacji. Rzeczywisty czas życia zależy od intensywności i warunków eksploatacji, więc
jeżeli podzespół uległ uszkodzeniu, powinien zostać wymieniony natychmiast, jeśli nawet jego
spodziewany czas życia jeszcze nie upłynął. W celu dokonania wymiany podzespołów prosimy
kontaktować się z przedstawicielstwem Mitsubishi Electric.
Nazwa
Orientacyjny czas życia
Serwowzmacniacz
Kondensatory filtra
10 lat
Przekaźniki
100.000 cykli przełączania
Wentylator(y)
10.000 do 30.000 godzin (2–3 lata)
Bateria podtrzymująca absolut-
nego systemu pozycjonowania
10.000 godzin
Serwosilnik
Łożyska
20.000 do 30.000 godzin
Enkoder
20.000 do 30.000 godzin
Uszczelka olejowa, V-Ring
5.000 godzin
Tab. 9-1: Czas życia podzespołów

Konserwacja i przeglądy
Czas życia
9 - 2
NOTATKI:
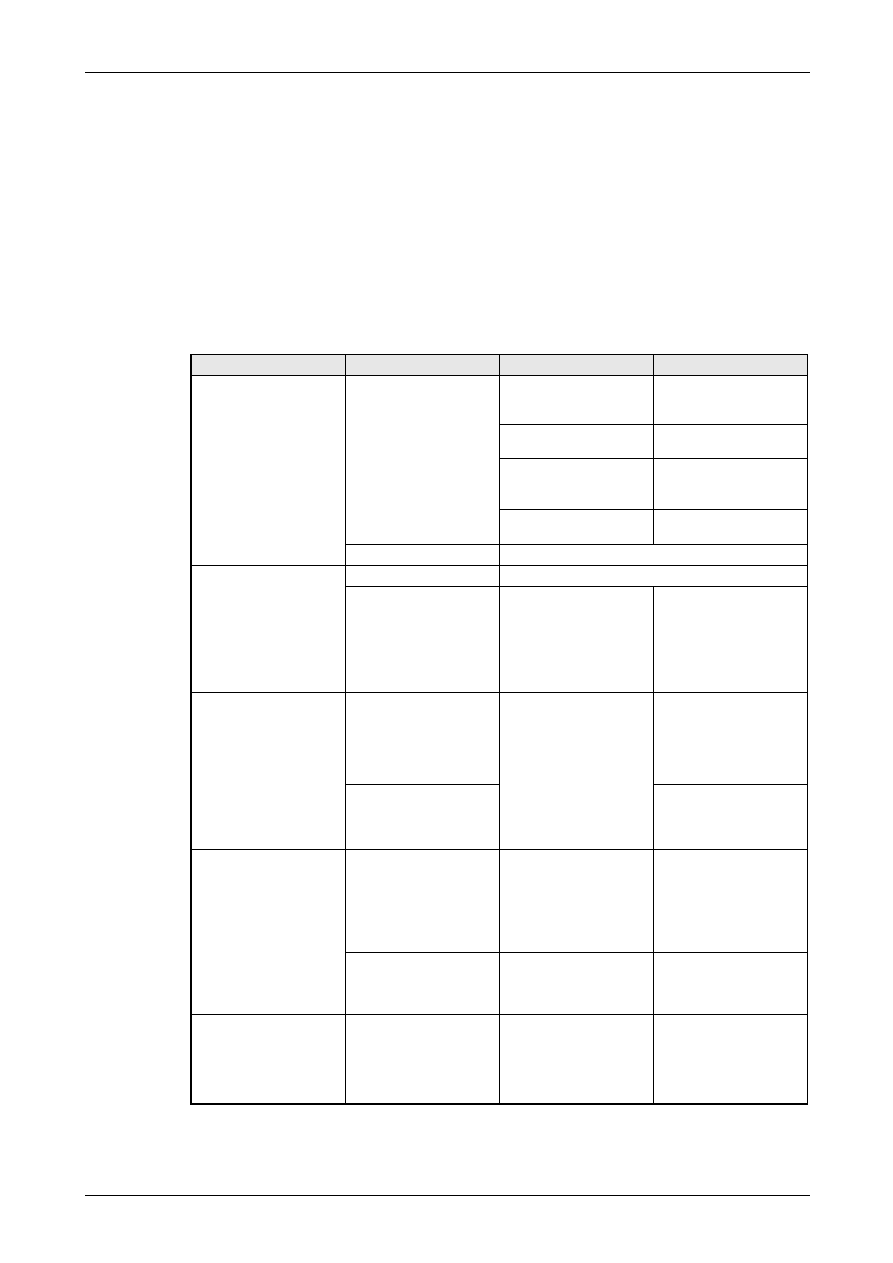
Wykrywanie usterek podczas uruchomienia
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 1
10
Wykrywanie i usuwanie usterek
10.1
Wykrywanie usterek podczas uruchomienia
Poniższe usterki mogą wystąpić podczas uruchomienia serwonapędu. W przypadku wykrycia
jednej z nich należy podjąć podane kroki zaradcze.
10.1.1 Regulacja
położenia
Wykrywanie usterek w trybie regulacji położenia
Okoliczności
Usterka
Poszukiwanie przyczyn
Możliwa przyczyna
Włączenie zasilania
Diody LED wyświetlacza
nie świecą lub migają;
Bez zmian po odłączeniu
wtyków CN1A, CN1B, CN2
i CN3
1. Brak napięcia zasilania
2. Uszkodzony serwo-
wzmacniacz
Problem znika po odłącze-
niu CN1A i CN1B
Zwarcie w przewodach
zasilania zacisku CN1
Problem znika po odłącze-
niu CN2
1. Zwarcie w kablu
enkodera
2. Uszkodzony enkoder
Problem znika po odłącze-
niu CN3
Zwarcie w przewodach
zasilania zacisku CN3
Pojawia się alarm.
Patrz Rozdz. 10.2
Załączenie sygnału „Servo-
on“
Pojawia się alarm.
Patrz Rozdz. 10.2
Wał serwosilnika obraca
się swobodnie (brak
momentu trzymającego).
Sprawdź na wyświetlaczu,
czy serwowzmacniacz jest
w stanie gotowości.
Sprawdź na wyświetlaczu
stan sygnałów wejścio-
wych i upewnij się, że syg-
nał SON jest w stanie ON.
1. Brak sygnału „Servo-on“
(błąd w połączeniach)
2. Brak napięcia zasilania
24V DC (wewnętrznego lub
zewnętrznego)
(Rozdz. 4.3.3)
Podanie sygnałów
zadających
Serwosilnik nie obraca się
Sprawdź na wyświetlaczu
obecność i liczbę impulsów
zadających.
1. Błąd połączeń - nie
podłączono sygnałów do
zacisków LSP/LSN.
2. Na wejściu brak
impulsów zadających
(Rozdz. 4.3.2).
Serwosilnik obraca się w
niewłaściwym kierunku
1. Błąd w połączeniach ze
sterownikiem.
2. Nieprawidłowa wartość
parametru Pr. 54
Zadanie poziomu reakcji
Przy małych prędkościach
występują znaczne pul-
sacje (wahania prędkości).
Wykonaj autotuning:
1. Podwyższ poziom
reakcji systemu.
2. Kilkakrotnie powtórz roz-
pędzanie i hamowanie ser-
wonapędu, by wykonany
został autotuning.
Niewłaściwie dobrane
współczynniki wzmoc-
nienia regulatorów
(Rozdz. 4.4)
Obciążenie o dużym
momencie bezwładności
powoduje niestabilność i
pulsacje prędkości.
Kilkakrotnie powtórz roz-
pędzanie i hamowanie ser-
wonapędu, by wykonany
został autotuning.
Niewłaściwie dobrane
współczynniki wzmoc-
nienia regulatorów
(Rozdz. 4.4)
Praca w cyklu
Odchylenia pozycjonowa-
nia.
Zweryfikuj na wyświet-
laczu ilość impulsów
zadających, impulsów
sprzężenia zwrotnego oraz
rzeczywiste położenie ser-
wosilnika.
Błąd w zliczaniu impulsów
ciągu zadającego np. z
powodu zakłóceń (patrz
następna strona)
Tab. 10-1: Wykrywanie usterek
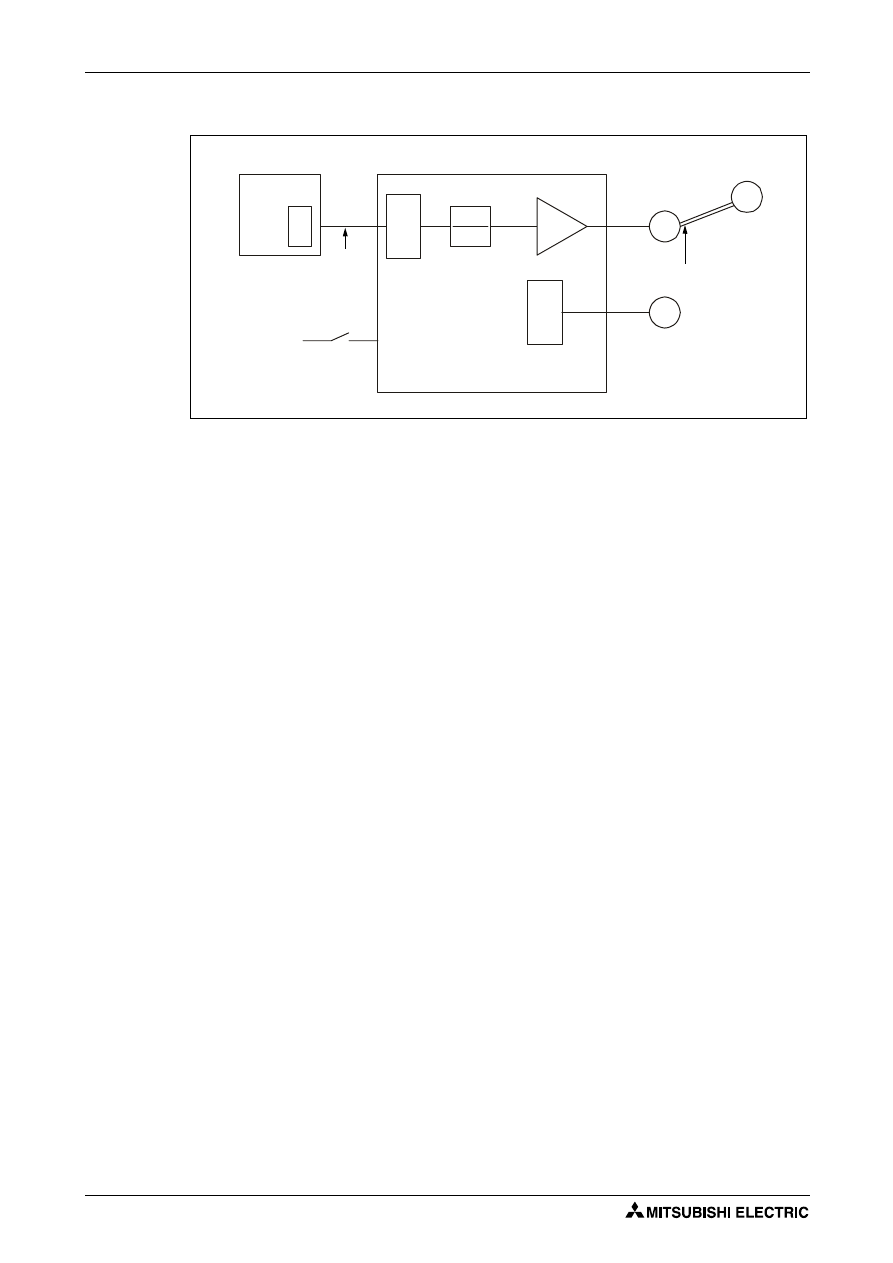
Wykrywanie i usuwanie usterek
Wykrywanie usterek podczas uruchomienia
10 - 2
Poszukiwanie źródła błędu pozycjonowania
W przypadku występowania błędu pozycjonowania, należy sprawdzić (patrz Rys. 10-1):
a) Liczbę impulsów, generowanych przez moduł pozycjonujący,
b) Wyświetlaną liczbę impulsów zadających,
c) Wyświetlaną liczbę impulsów sprzężenia zwrotnego, oraz
d) Rzeczywistą pozycję, na jakiej została zatrzymana maszyna.
Punkty A), B) i C) wskazują lokalizację możliwych źródeł błędu pozycjonowania.
Podczas normaInej pracy bez błędu pozycjonowania spełnione są poniższe zależności:
1) Q = P (Ilość impulsów wyjściowych modułu pozycjonującego = Ilość impulsów zadawania w
serwowzmacniaczu)
2) P × CMX (Parametr 3) / CDV (Parametr 4) = C (Ilość impulsów zadających × Przekładnia ele-
ktroniczna = Ilość impulsów sprzężenia zwrotnego)
3) C ×
∆s = M (Ilość impulsów sprzężenia zwrotnego × Przemieszczenie na impuls = Pozycja
maszyny)
Aby wykryć przyczynę błędu należy sprawdzić następujące możliwości:
Jeżeli naruszony jest warunek 1), najbardziej prawdopodobną przyczyną jest błędne zliczenie
ilości impulsów ciągu zadającego wskutek przenikania zakłóceń do okablowania pomiędzy
modułem pozycjonującym i serwowzmacniaczem (przyczyna A). Należy zastosować nas-
tępujące środki zaradcze:
●
Sprawdzić i ewentualnie skorygować sposób ekranowania połączeń.
●
Przejść od systemu z otwartym kolektorem do systemu ze sterownikiem linii różnicowej.
●
Odseparować przewody sygnałowe od przewodów siłowych.
●
Zastosować filtr przeciwzakłóceniowy na połaczeniach sygnałowych.
Jeżeli naruszony jest warunek 2), prawdopodobnej przyczyny należy szukać w wejściowych sy-
gnałach dwustanowych (przyczyna C). Możliwe jest, że:
●
podczas pracy serwonapędu został rozłączony sygnał servo-on (SON) lub jeden z wyłączni-
ków krańcowych (LSP lub LSN),
●
podczas pracy serwonapędu został sygnał kasowania (CR) lub resetu (RES) .
S000653C
Rys. 10-1: Mozliwe źródła i przyczyny błędu pozycjonowania
Q
P
C
CMX
CDV
M
L
Moduł pozycjon.
Przekładnia elektroniczna (Parametr 3, 4)
Enkoder
b) Impulsy zad.
Serwowzmacniacz
Serwosilnik
Maszyna
d) Pozycja
maszyny M
C) Wejścia: Servo-on
(SON), Wyłączniki
krańcowe (LSP/LSN)
B)
a) Licznik
impulsów
wyjściowych
c) Impulsy sprzę-
żenia zwrotnego
A)

Wykrywanie usterek podczas uruchomienia
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 3
●
sygnały na wejściach dwustanowych są zakłócane przez zewnętrzne szumy. Należy
wprowadzić lub podwyższyć stałą czasową filtra wejściowego (parametr Pr. 1).
Jeżeli naruszony jest warunek 3), prawdopodobną przyczyną jest mechaniczny luz lub poślizg
w maszynie pomiędzy wałem serwosilnika i pozycjonowanym obiektem (przyczyna B).
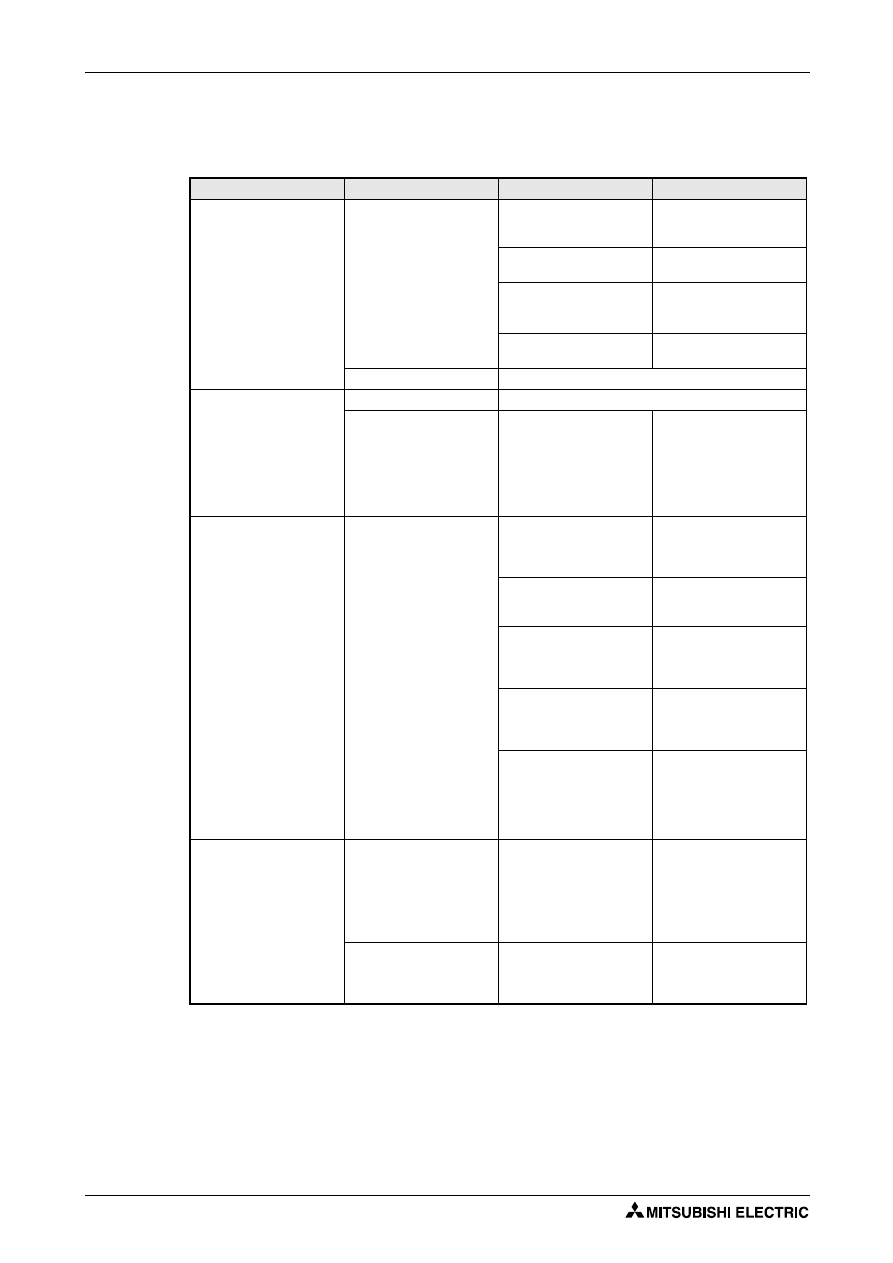
Wykrywanie i usuwanie usterek
Wykrywanie usterek podczas uruchomienia
10 - 4
10.1.2 Regulacja
prędkości
Wykrywanie usterek w trybie regulacji prędkości:
Okoliczności
Usterka
Poszukiwanie przyczyn
Możliwa przyczyna
Włączenie zasilania
Diody LED wyświetlacza
nie świecą lub migają;
Bez zmian po odłączeniu
wtyków CN1A, CN1B, CN2
i CN3
1. Brak napięcia zasilania
2. Uszkodzony serwo-
wzmacniacz
Problem znika po odłącze-
niu CN1A i CN1B
Zwarcie w przewodach
zasilania zacisku CN1
Problem znika po odłącze-
niu CN2
1. Zwarcie w kablu
enkodera
2. Uszkodzony enkoder
Problem znika po odłącze-
niu CN3
Zwarcie w przewodach
zasilania zacisku CN3
Pojawia się alarm.
Załączenie sygnału „Servo-
on“
Pojawia się alarm.
Wał serwosilnika obraca
się swobodnie (brak
momentu trzymającego).
Sprawdź na wyświetlaczu,
czy serwowzmacniacz jest
w stanie gotowości.
Sprawdź na wyświetlaczu
stan sygnałów wejścio-
wych i upewnij się, że syg-
nał SON jest w stanie ON.
1. Brak sygnału „Servo-on“
(błąd w połączeniach)
2. Brak napięcia zasilania
24V DC (wewnętrznego lub
zewnętrznego) na zacisku
COM
(Rozdz. 4.3.3)
Załączenie sygnału startu
w prawo (ST1) lub w lewo
(ST2)
Wał serwosilnika nie
obraca się
Wyświetlić i sprawdzić war-
tość napięcia sygnału ana-
logowego zadawania pręd-
kości (VC).
Brak sygnału zadawania
analogowego (napięcie
wynosi 0 V)
(Rozdz. 4.3.2).
Wyświetlić i sprawdzić
stany logiczne wejść
dwustanowych.
Brak sygnału LSP, LSN,
ST1 lub ST2
(Rozdz. 4.3.3).
Sprawdzić wartości pręd-
kości zaprogramowanych 1
do 7 (parametry Pr. 8 do 10
i 72 do 75).
Zaprogramowana jest war-
tość 0
(Rozdz. 4.3.5).
Sprawdzić zaprogramo-
waną wartość ograniczenia
momentu 1 (Parametr Pr.
28).
Zaprogramowano wartość
zbyt niską dla rzeczywist-
ego momentu obciążenia
(Rozdz. 4.3.5).
Jeżeli używane jest analo-
gowe ograniczenie mo-
mentu (TLA), wyświetlić i
sprawdzić wartość napię-
cia analogowego sygnału
ograniczenia.
Wartość ograniczenia jest
zbyt niska dla rzeczywis-
tego momentu obciążenia
(Rozdz. 4.3.5).
Zadanie poziomu reakcji
Przy małych prędkościach
występują znaczne pul-
sacje (wahania prędkości).
Wykonaj autotuning:
1. Podwyższ poziom
reakcji systemu.
2. Kilkakrotnie powtórz roz-
pędzanie i hamowanie ser-
wonapędu, by wykonany
został autotuning.
Niewłaściwie dobrane
współczynniki wzmoc-
nienia regulatorów
(Rozdz. 4.4)
Obciążenie o dużym
momencie bezwładności
powoduje niestabilność i
pulsacje prędkości.
Kilkakrotnie powtórz roz-
pędzanie i hamowanie ser-
wonapędu, by wykonany
został autotuning.
Niewłaściwie dobrane
współczynniki wzmoc-
nienia regulatorów
(Rozdz. 4.4)
Tab. 10-2: Wykrywanie usterek
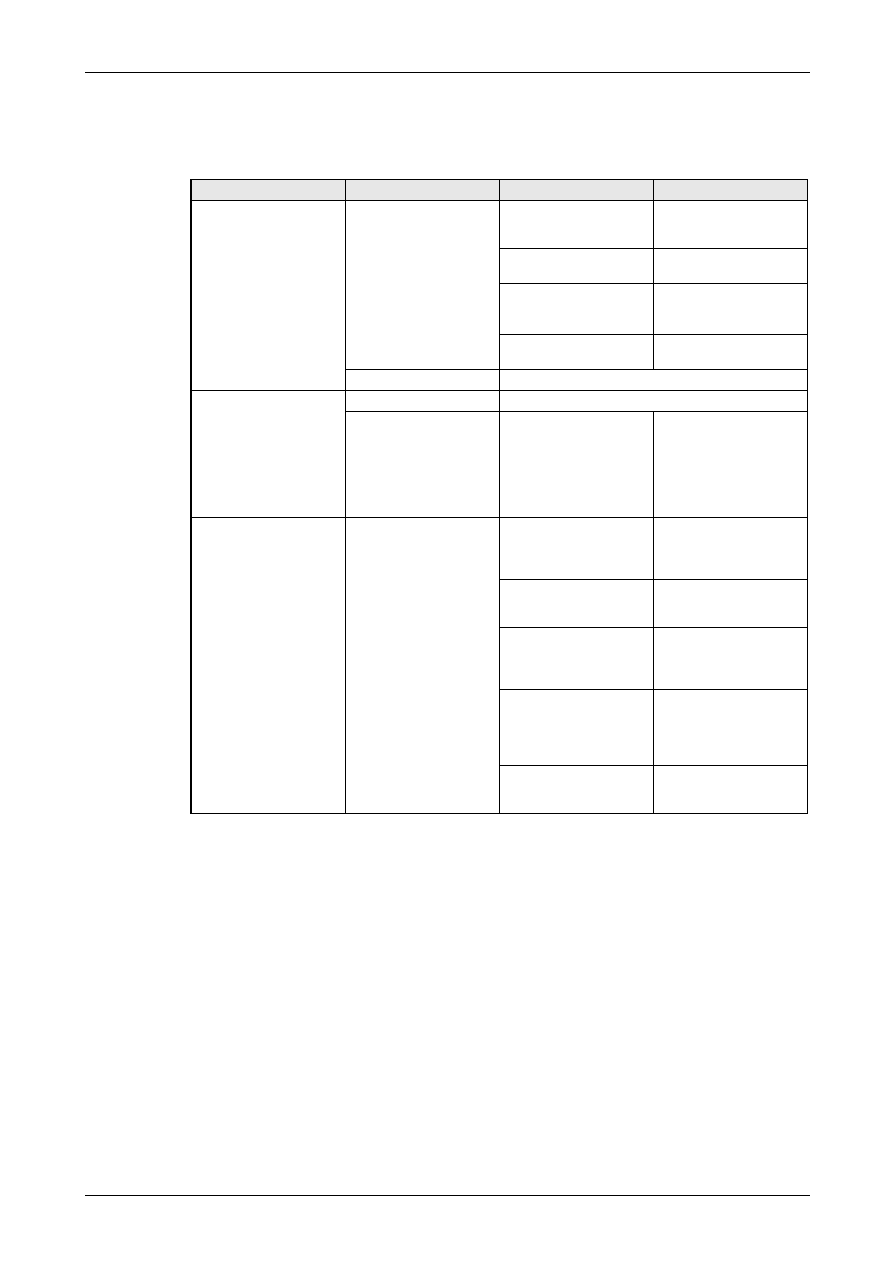
Wykrywanie usterek podczas uruchomienia
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 5
10.1.3 Regulacja
momentu
Wykrywanie usterek w trybie regulacji momentu:
Okoliczności
Usterka
Poszukiwanie przyczyn
Możliwa przyczyna
Włączenie zasilania
Diody LED wyświetlacza
nie świecą lub migają;
Bez zmian po odłączeniu
wtyków CN1A, CN1B, CN2
i CN3
1. Brak napięcia zasilania
2. Uszkodzony serwo-
wzmacniacz
Problem znika po odłącze-
niu CN1A i CN1B
Zwarcie w przewodach
zasilania zacisku CN1
Problem znika po odłącze-
niu CN2
1. Zwarcie w kablu
enkodera
2. Uszkodzony enkoder
Problem znika po odłącze-
niu CN3
Zwarcie w przewodach
zasilania zacisku CN3
Pojawia się alarm.
Patrz Rozdz. 10.2
Załączenie sygnału „Servo-
on“
Pojawia się alarm.
Patrz Rozdz. 10.2
Wał serwosilnika obraca
się swobodnie (brak
momentu trzymającego).
Sprawdź na wyświetlaczu,
czy serwowzmacniacz jest
w stanie gotowości.
Sprawdź na wyświetlaczu
stan sygnałów wejścio-
wych i upewnij się, że syg-
nał SON jest w stanie ON.
1. Brak sygnału „Servo-on“
(błąd w połączeniach)
2. Brak napięcia zasilania
24V DC (wewnętrznego lub
zewnętrznego) na zacisku
COM
(Rozdz. 4.3.3)
Załączenie sygnału startu
w prawo (RS1) lub w lewo
(RS2)
Wał serwosilnika nie
obraca się.
Wyświetlić i sprawdzić war-
tość napięcia sygnału ana-
logowego zadawania
momentu (TC).
Brak sygnału zadawania
analogowego (napięcie
wynosi 0 V) (Rozdz. 4.3.2).
Wyświetlić i sprawdzić
stany logiczne wejść
dwustanowych.
Brak sygnału RS1 lub RS2
(Rozdz. 4.3.3).
Sprawdzić zaprogramo-
wane wartości ograniczeń
prędkości 1 do 7 (parame-
try Pr. 8 do 10 i 72 do 75).
Zaprogramowana jest war-
tość 0
(Rozdz. 4.3.5).
Sprawdzić zapro-
gramowaną wartość
momentu przy maksymal-
nym sygnale zadającym
(Parameter 26)
Zaprogramowano wartość
zbyt niską dla rzeczywis-
tego momentu obciążenia
(Rozdz. 4.3.5).
Sprawdzić zaprogramo-
waną wartość ograniczenia
momentu 1 (Parametr 28).
Zaprogramowana jest war-
tość 0
(Rozdz. 4.3.5).
Tab. 10-3: Wykrywanie usterek
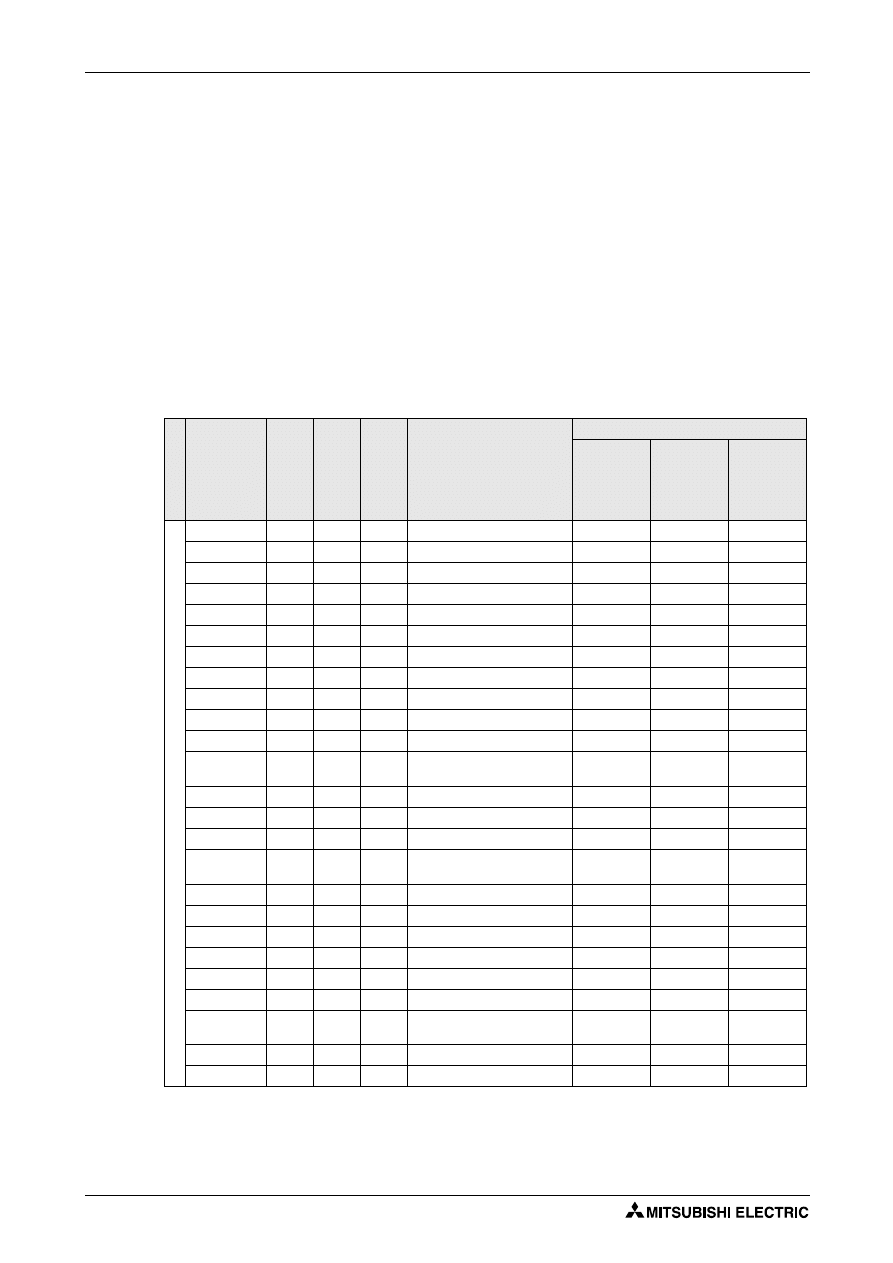
Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 6
10.2
Komunikaty alarmów i ostrzeżeń
10.2.1
Wykaz alarmów i ostrzeżeń
W przypadku wykrycia błędu w pracy serwonapędu wyświetlany jest odpowiedni komunikat
alarmu lub ostrzeżenia. W przypadku alarmu załączany jest tranzystor na wyjściu ALM (stan ni-
ski, 0V na wyjściu). Postępowanie w przypadku wystąpienia poszczególnych alarmów i os-
trzeżeń opisane jest w Rozdz. 10.2.2 i Rozdz. 10.2.3. Jeżeli parametr Pr. 49 ma wartość 1,
poprzez wyjścia CN1B-19, CN1A-18 i CN1A-19 wydawany jest binarny kod alarmu. Os-
trzeżenia (AL.92 do AL.EA) nie mają przyporządkowanego kodu alarmu.
Przedstawione poniżej w tabeli Tab. 10-4 kombinacje stanów wyjściowych odpowiadają kodom
poszczególnych alarmów jedynie w stanie alarmu, tj. gdy na wyjściu ALM jest stan niski. Pod-
czas normalnej pracy, tj. bez sygnału alarmu, na wyjściach CN1B-19, CN1A-18 i CN1A-19
obecne są przypisane do nich sygnały (standardowo: CN1B-19: ZSP, CN1A-18: INP lub SA,
CN1A-19: RD).
Wyświetlany
komunikat
Styk
CN1B-
18
Styk
CN1A-
18
Styk
CN1A-
19
Nazwa alarmu
Kasowanie komunikatu alarmu
Wyłącze-
nie i
załączenie
zasilania
Klawisz
SET przy
wyświetlo-
nym komu-
nikacie
alarmu
Załączenie
sygnału
RES
Alarmy
AL.10
0
1
0
Zbyt niskie napięcie zasilania
O
O
O
AL.12
0
0
0
Błąd pamięci 1
O
—
—
AL.13
0
0
0
Błąd zegara
O
—
—
AL.15
0
0
0
Błąd pamięci 2
O
—
—
AL.16
1
1
0
Błąd enkodera
O
—
—
AL.17
0
0
0
Błąd płyty głównej 2
O
—
—
AL.19
0
0
0
Błąd płyty głównej 3
O
—
—
AL.1A
1
1
0
Niewłaściwy serwosilnik
O
—
—
AL.20
1
1
0
Błąd enkodera 2
O
—
—
AL.24
1
0
0
Zwarcie doziemne
O
—
—
AL.25
1
1
0
Utrata pozycji absolutnej
O
—
—
AL.30
0
0
1
Przeciążenie obwodu
hamowania
O
O
O
AL.31
1
0
1
Zbyt wysoka prędkość
O
O
O
AL.32
1
0
0
Przeciążenie prądowe
O
O
O
AL.33
0
0
1
Przepięcie
O
—
—
AL.35
1
0
1
Zbyt wysoka częstotliwość
wejściowa
O
O
O
AL.37
0
0
0
Błędna wartość parametru
O
—
—
AL.45
0
1
1
Przegrzanie obwodu mocy
O
O
O
AL.46
0
1
1
Przegrzanie serwosilnika
O
O
O
AL.50
0
1
1
Przeciążenie 1
O
a
O
a
O
a
AL.51
0
1
1
Przeciążenie 2
O
a
O
a
O
a
AL.52
1
0
1
Nadmierny uchyb
O
O
O
AL.8A
0
0
0
Time-out komunikacji szere-
gowej
O
O
O
AL.8E
0
0
0
Błąd komunikacji szeregowej
O
O
O
8888
0
0
0
Watchdog
O
—
—
Tab. 10-4: Przegląd alarmów i ostrzeżeń (1)
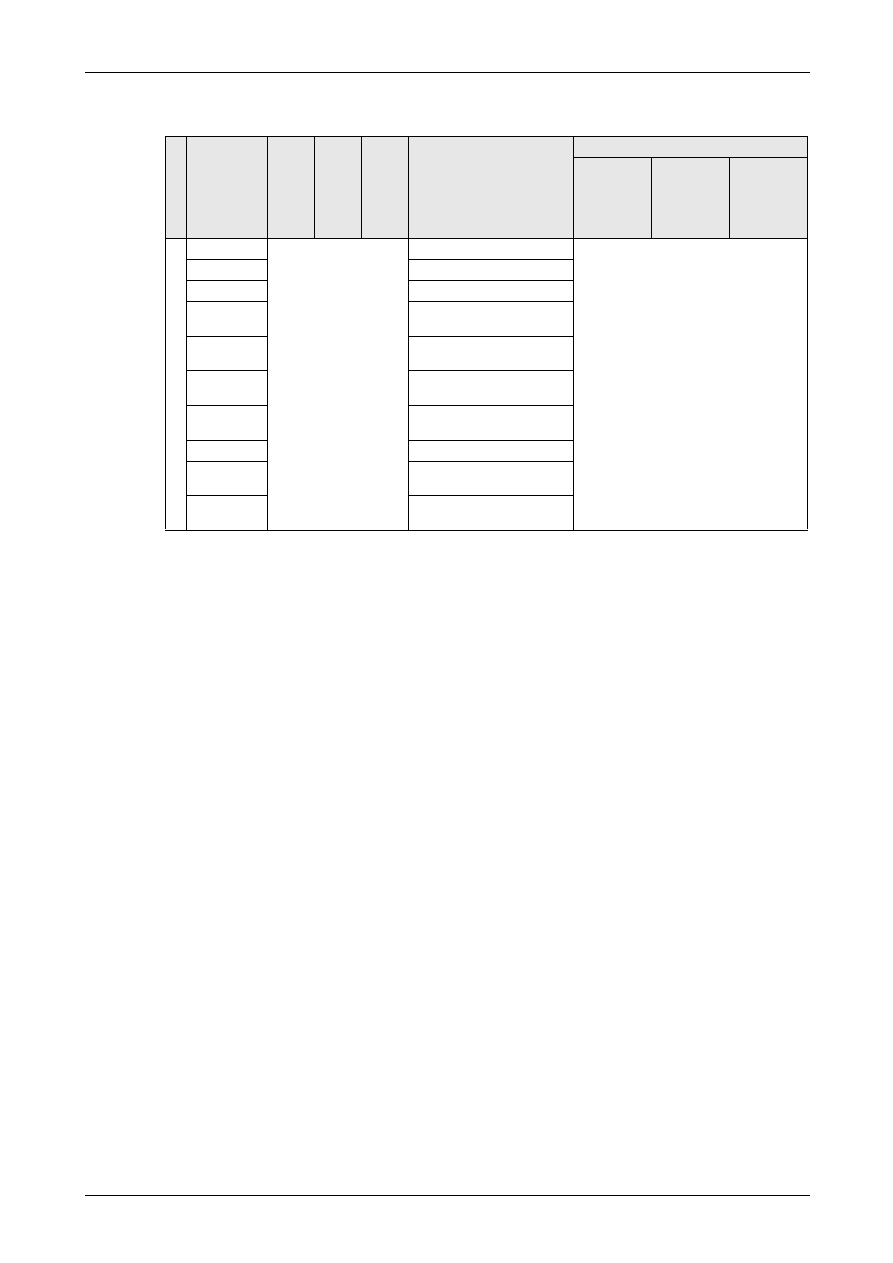
Komunikaty alarmów i ostrzeżeń
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 7
a
Przed skasowaniem alarmu i wznowieniem pracy należy usunąć przyczynę alarmu i
pozwolić serwowzmacniaczowi, serwosilnikowi i układowi hamowania ostygnąć przez co
najmniej 30 minut.
Wyświetlany
komunikat
Styk
CN1B-
18
Styk
CN1A-
18
Styk
CN1A-
19
Nazwa alarmu
Kasowanie komunikatu alarmu
Wyłącze-
nie i
załączenie
zasilania
Klawisz
SET przy
wyświetlo-
nym komu-
nikacie
alarmu
Załączenie
sygnału
RES
Ostr
ze
żenia
AL.92
—
Przerwa w obwodzie baterii
Usunięcie przyczyny automatycznie
kasuje komunikat ostrzeżenia.
AL.96
Błąd bazowania
AL.9F
Ostrzeżenie baterii
AL.E0
Ostrzeżenie przed przecią-
żeniem obwodu hamowania
AL.E1
Ostrzeżenie przed
przeciążeniem
AL.E3
Ostrzeżenie licznika pozycji
absolutnej
AL.E5
Ostrzeżenie przed time-out
transmisji ABS
AL.E6
Zatrzymanie awaryjne
AL.E9
Ostrzeżenie przed odłącze-
niem obwodu mocy
AL.EA
Ostrzeżenie o braku „Servo-
on“ podczas transmisji ABS
Tab. 10-4: Przegląd alarmów i ostrzeżeń (2)
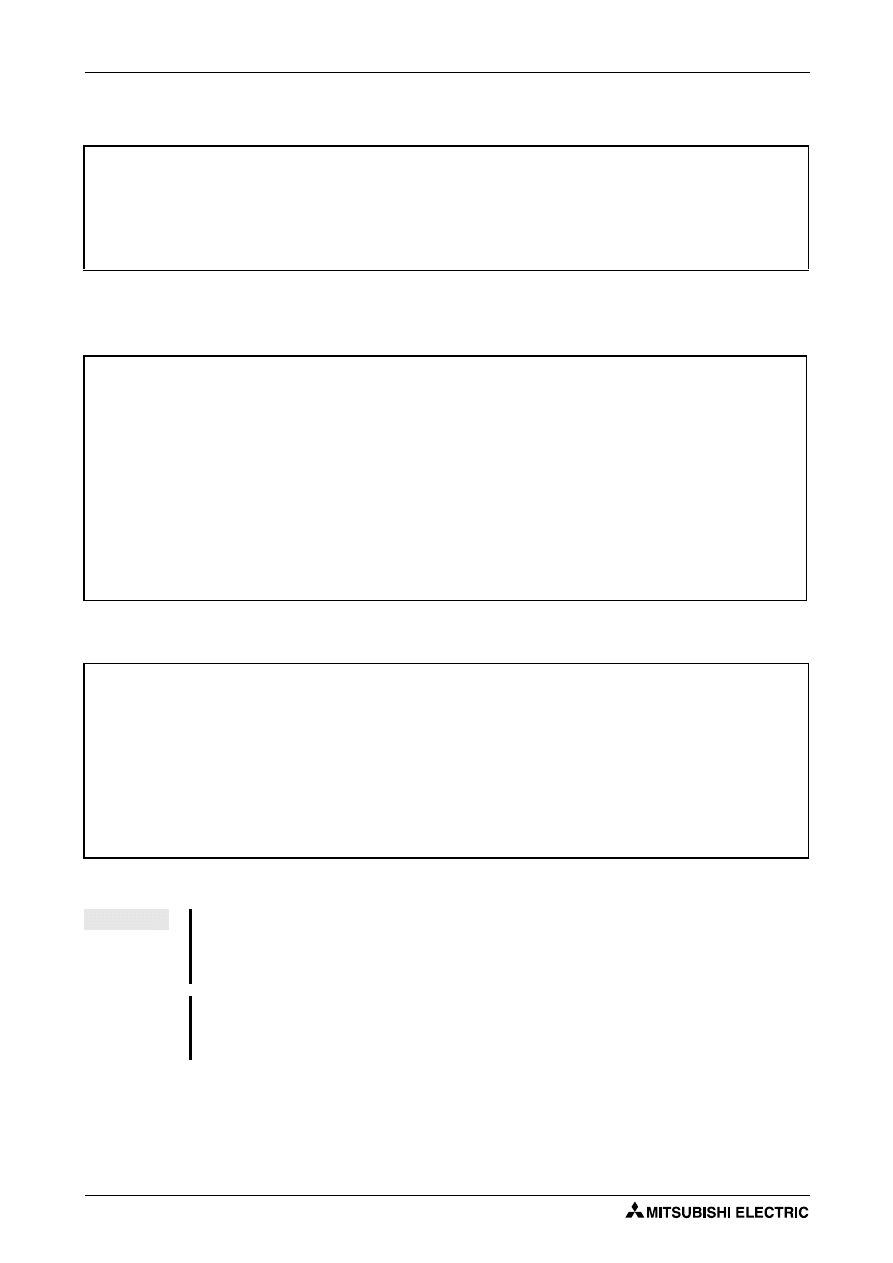
Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 8
10.2.2
Komunikaty alarmu i usuwanie ich przyczyn
Zasady bezpieczeństwa po wystąpieniu alarmu:
!!!
ZAGROŻENIE:
W przypadku wystąpienia alarmu należy bezwzględnie wykryć i usunąć jego przyczynę
i upewnić się o braku zagrożeń, a następnie skasować alarm i wznowić pracę.
W przypadku wystąpienia alarmu utraty pozycji absolutnej (AL.25) należy bezwzględ-
nie wykonać bazowanie. Zaniedbanie grozi nieprawidłową pracą maszyny.
!
OSTRZEŻENIE:
W przypadku wystąpienia jednego z poniższych alarmów należy bezwzględnie wykryć
i usunąć jego przyczynę, oraz przed wznowieniem pracy pozwolić serwowzmacniac-
zowi, serwosilnikowi i układowi hamowania ostygnąć przez co najmniej 30 minut:
●
Przeciążenie obwodu hamowania AL.30
●
Przeciążenie 1 AL.50
●
Przeciążenie 2 AL.51
Jeżeli bez odczekania ww. czasu alarm zostanie skasowany i praca zostanie wzno-
wiona przez wyłączenie i załączenie zasilania, może dojść do uszkodzenia serwow-
zmacniacza, serwosilnika lub układu hamowania.
!!!
ZAGROŻENIE:
Chwilowy zanik zasilania
W przypadku spadku napięcia, trwającego ponad 60 ms, pojawia się alarm o zbyt
niskim napięciu (AL.10). Jeżeli spadek napięcia trwa dalsze 20 ms, obwody sterowania
zostaną wyłączone. Jeżeli w tym stanie zasilanie zostanie przywrócone, a sygnał
Servo-on pozostaje włączony, serwowzmacniacz zostanie uruchomiony w sposób
niekontrolowany. Aby uniknąć niebezpieczeństwa, należy przygotować sekwencję
zapewniającą natychmiastowe odłączenie sygnału Servo-on w przypadku wystąpienia
alarmu.
UWAGI
W chwili wystąpienia alarmu sygnał alarmu (wyjście ALM) przechodzi w stan niski, a na
wyświetlaczu pojawia się odpowiedni komunikat alarmu. Serwosilnik zostaje zatrzymany z
użyciem hamowania dynamicznego. Przy pomocy np. komputera PC z oprogramowaniem
narzędziowym można ustalić przyczynę alarmu.
Tryb regulacji położenia (inkrementalny)
W przypadku wystąpienia alarmu tracone są dane o pozycji bazowej. Przy wznowieniu
pracy po skasowaniu alarmu należy wykonać bazowanie maszyny.
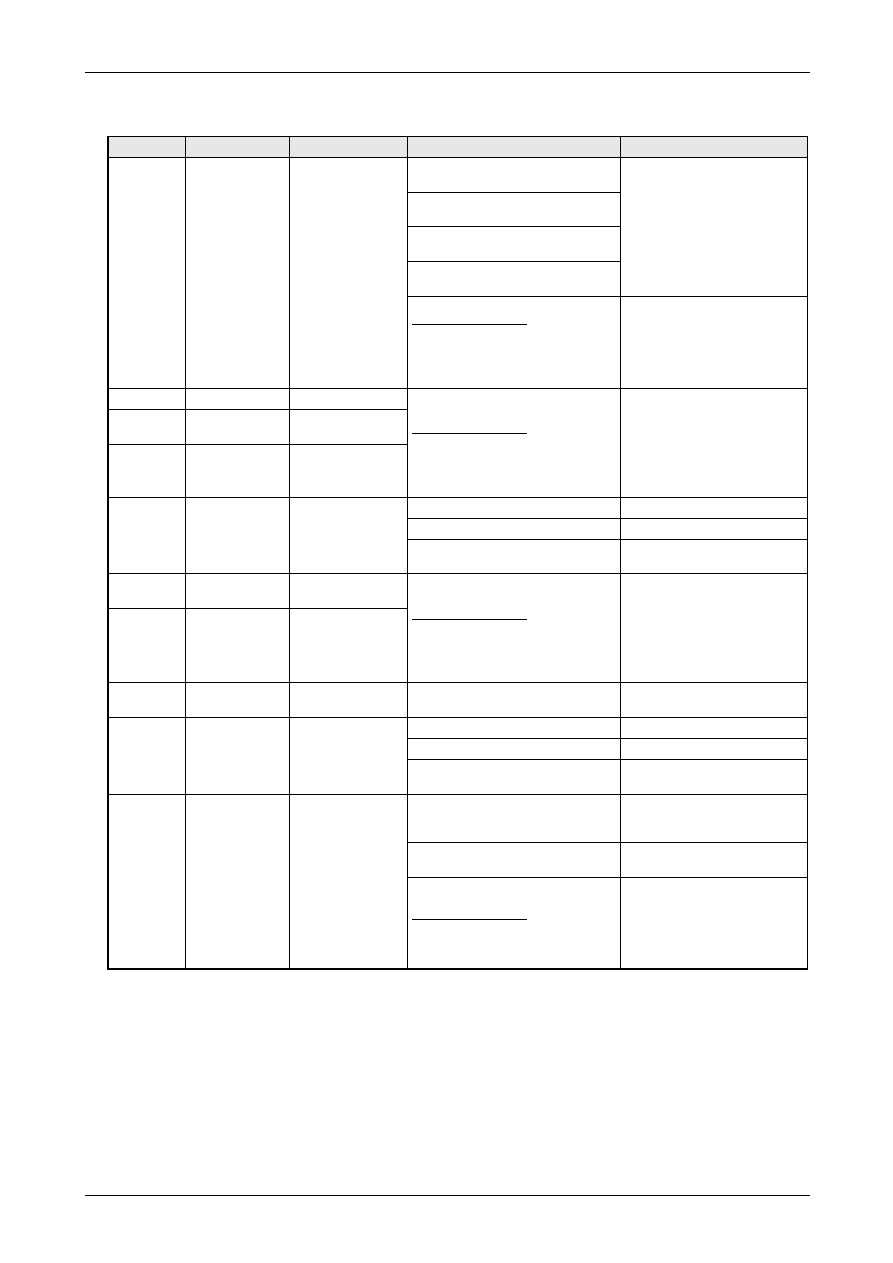
Komunikaty alarmów i ostrzeżeń
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 9
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.10
Zbyt niskie
napięcie zasilania
Napięcie zasilania
spadło poniżej war-
tości 160 V.
1. Zbyt niskie napięcie sieci zasi-
lającej.
Sprawdzić źródło zasilania
2. Chwilowy zanik zasilania, trwający
ponad 60 ms.
3. Zbyt wysoka impedancja źródła
zasilania powoduje spadek napięcia.
4. Zasilanie zostało wyłączone i załą-
czone ponownie przed upływem 5 s.
5. Uszkodzony serwowzmacniacz.
Sposób sprawdzenia:
Alarm AL.10 pojawia się po odłącze-
niu złącz CN1A, CN1B i CN3 przy
podłączonym zasilaniu obwodów ste-
rowania.
Wymienić serwowzmacniacz
AL.12
Błąd pamięci 1
Błąd pamięci RAM
Uszkodzenie podzespołów serwow-
zmacniacza.
Sposób sprawdzenia:
Alarm (jeden z AL.12 - AL.15) pojawia
się po odłączeniu złącz CN1A, CN1B i
CN3 przy podłączonym zasilaniu
obwodów sterowania.
Wymienić serwowzmacniacz
AL.13
Błąd zegara
Uszkodzenie na
płycie sterowania
AL.15
Błąd pamięci 2
Błąd EEPROM
AL.16
Błąd enkodera 1
Błąd komunikacji
pomiędzy enko-
derem i serwo-
wzmacniaczem
1. Rozłączone złącze enkodera (CN2) Podłączyć prawidłowo
2. Uszkodzony enkoder
Wymienić serwosilnik
3. Uszkodzony kabel enkodera
(przerwa lub zwarcie przewodu)
Naprawić lub wymienić kabel
AL.17
Błąd płyty
głównej 2
Uszkodzony CPU
Uszkodzenie podzespołów serwow-
zmacniacza.
Sposób sprawdzenia:
Alarm (AL.17 lub AL.19) pojawia się
po odłączeniu złącz CN1A, CN1B i
CN3 przy podłączonym zasilaniu
obwodów sterowania.
Wymienić serwowzmacniacz
AL.19
Błąd pamięci 3
Błąd pamięci ROM
AL.1A
Niewłaściwy ser-
wosilnik
Błędny dobór ser-
wosilnika
Kombinacja serwowzmacniacza i ser-
wosilnika jest niedopuszczalna.
Zastosować odpowiednią kombi-
nację
AL.20
Błąd enkodera 2
Błąd komunikacji
pomiędzy enko-
derem i serwo-
wzmacniaczem
1. Rozłączone złącze enkodera (CN2) Podłączyć prawidłowo
2. Uszkodzony enkoder
Wymienić serwosilnik
3. Uszkodzony kabel enkodera
(przerwa lub zwarcie przewodu)
Naprawić lub wymienić kabel
AL.24
Zwarcie dozie-
mne
Zwarcie pomiędzy
obwodem mocy i
uziemieniem
1. Połączenie elektryczne pomiędzy
przewodami zasilania i serwosilnika
na listwie zasilania (TE1)
Podłączyć prawidłowo
2. Uszkodzona lub pogorszona
izolacja kabla lub serwosilnika
Wymienić kabel
3. Uszkodzenie obwodu mocy ser-
wowzmacniacza.
Sposób sprawdzenia:
Alarm AL.24 pojawia się po odłącze-
niu kabla serwosilnika od zacisków U,
V, W.
Wymienić serwowzmacniacz
Tab. 10-5: Wykrywanie uszkodzeń (1)
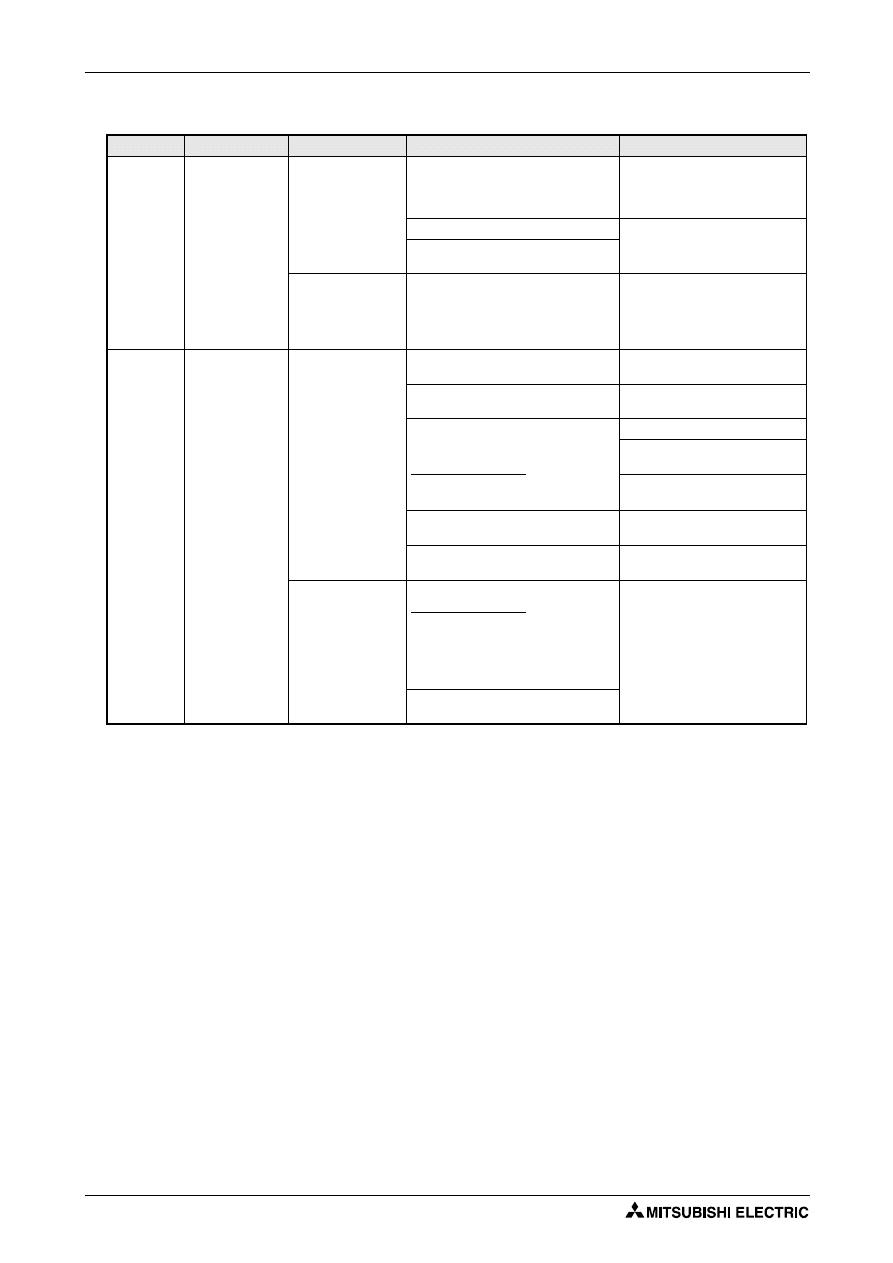
Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 10
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.25
Utrata pozycji
absolutnej
Błędne dane o pozy-
cji absolutnej
1. Zbyt niskie napięcie kondensatora
podtrzymującego w enkoderze
Pozostawić serwowzmacniacz w
stanie alarmu na kilka minut, po
czym wyłączyć i załączyć zasi-
lanie. Wykonać bazowanie.
2. Zbyt niskie napięcie baterii
Wymienić baterię.
Wykonać bazowanie.
3. Uszkodzony przewód połącze-
niowy baterii lub bateria.
Po raz pierwszy
załączono zasilanie
w systemie pozyc-
jonowania absolut-
nego
4. Nie naładowany kondensator bufo-
rujący zasilanie pamięci w enkoderze.
Pozostawić serwowzmacniacz w
stanie alarmu na kilka minut, po
czym wyłączyć i załączyć zasi-
lanie. Wykonać bazowanie.
AL.30
Przeciążenie
obwodu hamowa-
nia
Przekroczona
dopuszczalna war-
tość obciążenia
opornika
hamującego.
1. Niewłaściwie wpisana wartość
parametru Pr. 0
Wpisać prawidłową wartość
2. Nie podłączony wbudowany lub
zewnętrzny opornik hamujący.
Podłączyć prawidłowo
3. Zbyt krótki czas cyklu lub
długotrwałe hamowanie powoduje
przeciążenie obwodu hamowania.
Sposób sprawdzenia:
Wyświetlić i sprawdzić współczynnik
obciążenia obwodu hamowania.
1. Wydłużyć czas cyklu
2. Zastosować opornik hamujacy
większej mocy
3. Zmniejszyć obciążenie
4. Napięcie zasilania serwowzmac-
niacza przekracza 260 V.
Zastosować prawidłowe napięcie
zasilania
5. Uszkodzony opornik hamujący
(wbudowany lub zewnętrzny).
Wymienić serwowzmacniacz lub
opornik hamujący
Uszkodzenie tran-
zystora hamującego
6. Uszkodzony tranzystor hamujący
Sposób sprawdzenia:
1. Opornik hamujący jest nadmiernie
rozgrzany.
2. Alarm występuje także po odłącze-
niu opornika hamującego (wbudowa-
nego lub zewnętrznego).
Wymienić serwowzmacniacz
Uszkodzony opornik hamujący (wbu-
dowany lub zewnętrzny).
Tab. 10-5: Wykrywanie uszkodzeń (2)
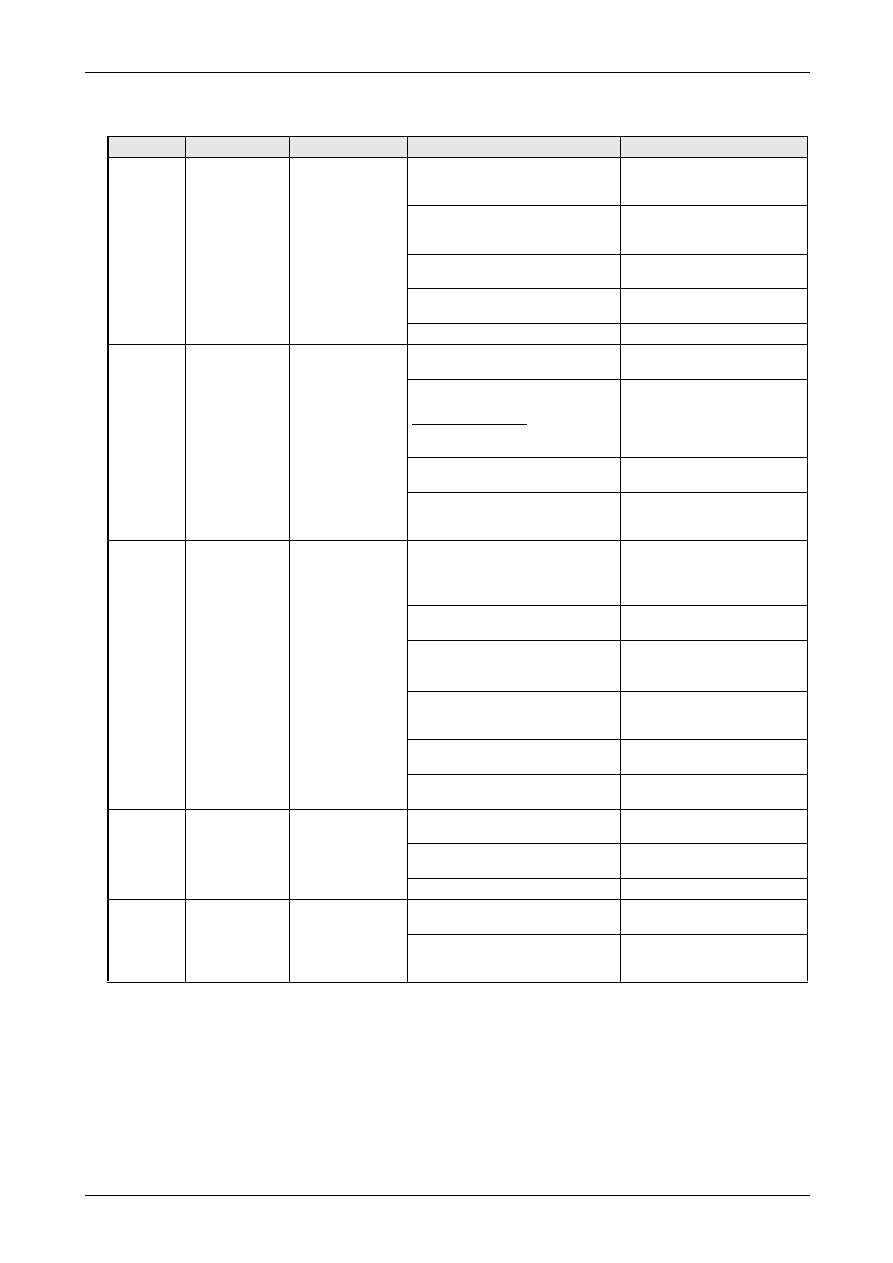
Komunikaty alarmów i ostrzeżeń
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 11
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.31
Zbyt wysoka
prędkość
Prędkość przekra-
cza maksymalnie
dopuszczalną war-
tość
1. Częstotliwość zadającego ciągu
impulsów przekracza maksymalnie
dopuszczalną wartość.
Nastawić prawidłową częstotli-
wość impulsów
2. Zbyt krótka wartość czasu rozpę-
dzania/hamowania powoduje przere-
gulowanie.
Podwyższyć wartość czasu roz-
pędzania/hamowania
3. Niestabilność systemu serwo
powoduje przeregulowanie.
Wykonać optymalizację wzmoc-
nień.
4. Zbyt duże przełożenie przekładni
elektronicznej (Parametry Pr. 3, 4).
Ustawić prawidłowo
5. Uszkodzenie enkodera
Wymienić serwosilnik
AL.32
Przeciążenie
prądowe
Prąd jest wyższy od
dopuszczalnego
prądu serwowzmac-
niacza
1. Zwarcie w jednej lub więcej fazach
wyjściowych U, V, W
Usunąć zwarcie
2. Uszkodzony tranzystor (moduł
mocy, IPM) serwowzmacniacza.
Sposób sprawdzenia: Alarm (AL.32)
występuje przy załączeniu zasilania z
rozłączonymi zaciskami U, V, W.
Wymienić serwowzmacniacz
3. Zwarcie doziemne w jednej lub
więcej z faz wyjściowych U, V, W.
Usunąć zwarcie
4. Fałszywa aktywacja zabezpiecze-
nia nadprądowego wskutek zakłóceń
zewnętrznych.
Podjąć środki dla eliminacji
zakłóceń
AL.33
Przepięcie
Napięcie DC w stop-
niu pośrednim
przekroczyło 400 V.
1. Odłączony przewód połączeniowy
opornika hamującego (wbudowanego
lub zewnętrznego).
1. Podłączyć prawidłowo prze-
wód
2. Skorygować podłączenie zew-
nętrznego opornika hamującego
2. Uszkodzenie tranzystora
hamującego
Wymienić serwowzmacniacz
3. Uszkodzony kabel połączeniowy
opornika hamującego (wbudowanego
lub zewnętrznego) lub sam opornik
1. Wymienić serwowzmacniacz
2. Wymienić zewnętrzny opornik
hamujący
4. Moc wbudowanego lub zewnętrzne-
go opornika hamującego jest niewys-
tarczająca.
Użyć opornika zewnętrznego
odpowiedniej mocy
5. Zbyt wysokie napięcie zasilania
Użyć źródła zasilania o odpow-
iednim napięciu
6. Zwarcie doziemne w jednej z faz
wyjściowych U, V, W.
Usunąć zwarcie
AL.35
Zbyt wysoka
częstotliwość
impulsów
zadających
Częstotliwość
impulsów na wejściu
serwowzmacniacza
jest zbyt wysoka.
1. Zbyt wysoka częstotliwość
impulsów na wyjściu sterownika
Nastawić prawidłową wartość
2. Zakłócenia w okablowaniu
Prawidłowo wykonać okablowa-
nie i ekranowanie
3. Uszkodzony generator ręczny
Wymienić
AL.37
Błąd parametru
Wpisano niedo-
puszczalną wartość
parametru.
1. Uszkodzenie serwowzmacniacza
spowodowało zapis błędnej wartości.
Wymiana serwowzmacniacza
2. W parametrze Pr. 0 wybrano opcjo-
nalny opornik hamujący niedopuszcza-
lny dla danego serwowzmacniacza.
Wpisać prawidłową wartość
parametru Pr. 0
Tab. 10-5: Wykrywanie uszkodzeń (3)
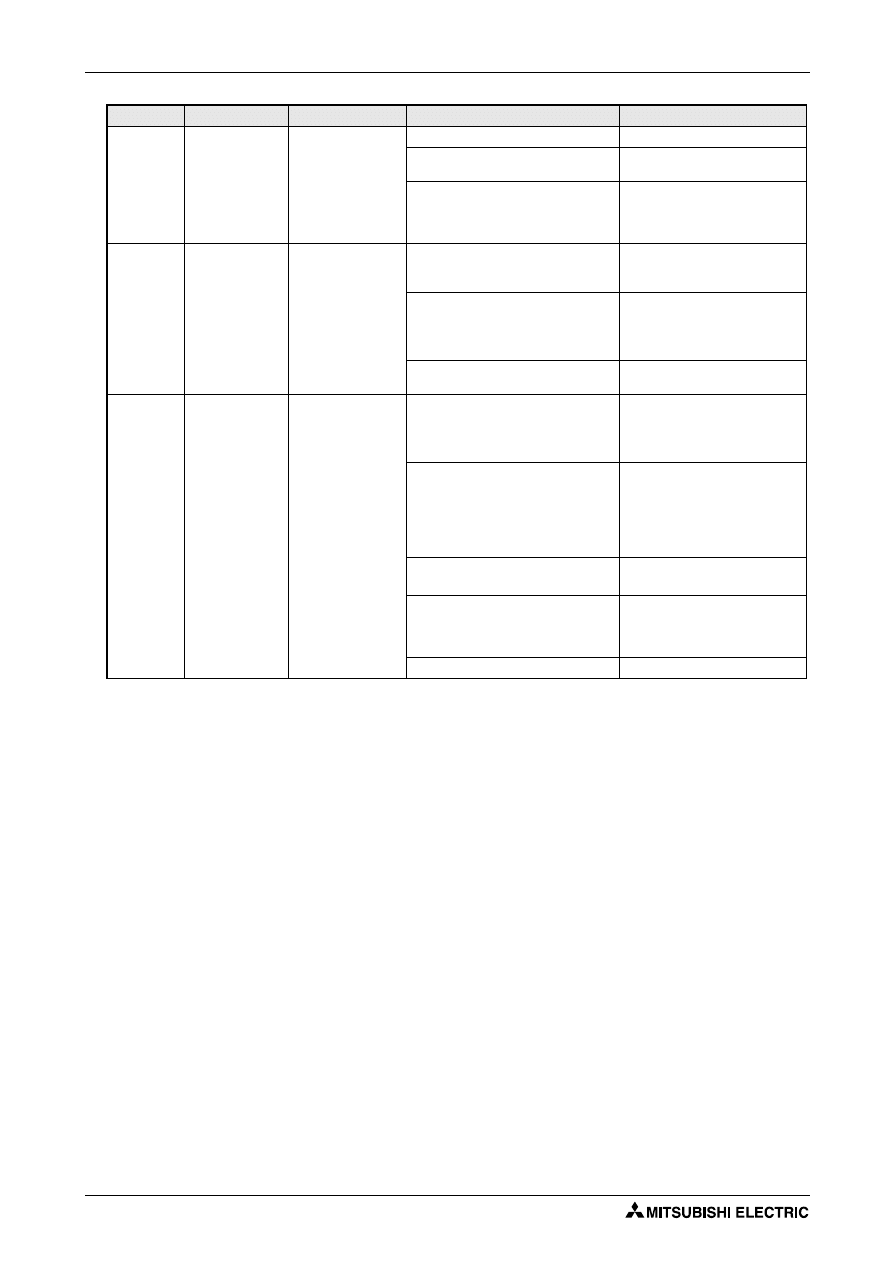
Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 12
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.45
Przegrzanie
obwodu mocy
Temperatura ele-
mentów obwodu
mocy jest zbyt
wysoka.
1. Uszkodzony serwowzmacniacz
Wymienić serwowzmacniacz
2. Wyłączono i załączono ponownie
zasilanie w stanie przeciążenia.
Sprawdzić warunki pracy
3. Wentylator chłodzący serwowzmac-
niacza nie obraca się
1. Wymienić serwowzmacniacz
lub wentylator.
2. Obniżyć temperaturę otocze-
nia
AL.46
Przegrzanie ser-
wosilnika
Temperatura ser-
wosilnika przek-
roczyła dopuszczal-
ną wartość, co spo-
wodowało zadziała-
nie zabezpieczenia
termicznego.
1. Temperatura otoczenia ser-
wosilnika przekracza 40 °C.
Zapewnić temperaturę otoczenia
serwosilnika w zakresie 0 do 40
°C.
2. Serwosilnik jest przeciążony.
1. Zredukować obciążenie.
2. Wydłużyć czas cyklu.
3. Użyć serwosilnika większej
mocy.
3. Uszkodzony czujnik termiczny w
enkoderze serwosilnika.
Wymienić serwosilnik
AL.50
Przeciążenie 1
Przeciążenie ser-
wowzmacniacza
Przeciążenie
300 %:
> 2,5 s
Przeciążenie
200 %:
> 100 s
1. Prąd wyjściowy serwowzmacni-
acza długotrwale przekracza wartość
znamionową.
1. Zredukować obciążenie
2. Wydłużyć czas cyklu.
3. Użyć serwosilnika większej
mocy.
2. System serwo jest niestabilny.
1. Kilkakrotnie powtórzyć cykl
rozpędzana/hamowania, by
umożliwić autotuning.
2. Zmienić poziom reakcji (Pr. 2)
3. Wyłączyć autotuning i dobrać
wzmocnienia ręcznie.
3. Przeciążenie mechaniczne, kolizja
w maszynie
1. Skontrolować warunki pracy
2. Użyć wyłączników krańcowych
4. Błędne podłączenie serwosilnika.
Zaciski U, V, W serwowzmacniacza
nie odpowiadają zaciskom U, V, W
serwosilnika.
Podłączyć prawidłowo
5. Uszkodzenie enkodera
Wymienić serwosilnik
Tab. 10-5: Wykrywanie uszkodzeń (4)
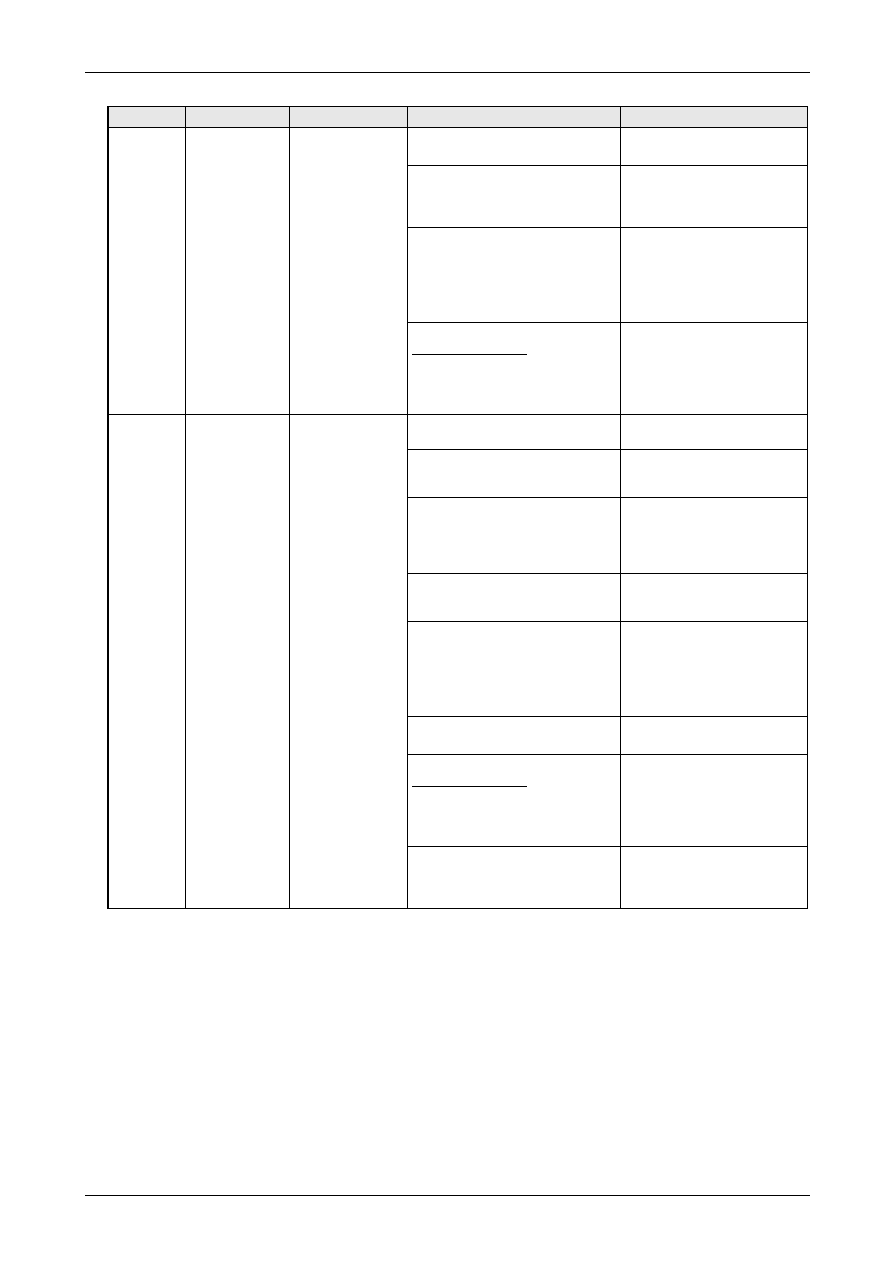
Komunikaty alarmów i ostrzeżeń
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 13
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.51
Przeciążenie 2
W wyniku kolizji w
maszynie, zabloko-
wania silnika itp. w
czasie powyżej 1s
przepływa prąd
powyżej wartości
maksymalnej.
1. Przeciążenie mechaniczne, kolizja
w maszynie
1. Skontrolować warunki pracy
2. Użyć wyłączników krańcowych
2. Błędne podłączenie serwosilnika.
Zaciski U, V, W serwowzmacniacza
nie odpowiadają zaciskom U, V, W
serwosilnika.
Podłączyć prawidłowo
3. System serwo jest niestabilny.
1. Kilkakrotnie powtórzyć cykl
rozpędzania/hamowania, by
umożliwić autotuning.
2. Zmienić poziom reakcji (Pr. 2)
3. Wyłączyć autotuning i dobrać
wzmocnienia ręcznie.
4. Uszkodzenie enkodera.
Sposób sprawdzenia: przy ręcznym
obracaniu serwosilnika wyświetlana
ilość impulsów nie zmienia się pro-
porcjonalnie do kąta obrotu, lecz
zmienia się skokowo lub cofa się.
Wymienić serwosilnik
AL.52
Zbyt duży uchyb
Wartość uchybu (w
impulsach) przekra-
cza dziesięciokrot-
ną wartość rozdziel-
czości enkodera
1. Zbyt krótki czas rozpędzania/
hamowania.
Wydłużyć czas rozpędzania/
hamowania
2. Wartość ograniczenia momentu
obrotowego (Parametr Pr. 28) jest
zbyt niska.
Podnieść wartość ograniczenia
momentu
3. Rozruch serwosilnika jest
niemożliwy wskutek niewystarczają-
cego momentu rozruchowego z
powodu spadku napięcia zasilania
podczas rozruchu
1. Użyć źródła zasilania o więk-
szej mocy lub niższej impedancji.
2. Zastosować serwosilnik więk-
szej mocy
4. Zbyt niska wartość parametru Pr. 6. Podwyższyć wartość Pr. 6, zopty-
malizować dla uzyskania
poprawnej pracy
5. Wał serwosilnika został obrócony
przez zewnętrzną siłę.
1. Jeżeli używane jest ogranicze-
nie momentu, podnieść jego war-
tość
2. Zredukować obciążenie
3. Zastosować serwosilnik więk-
szej mocy
6. Przeciążenie mechaniczne, kolizja
w maszynie
1. Skontrolować warunki pracy
2. Użyć wyłączników krańcowych
7. Uszkodzenie enkodera.
Sposób sprawdzenia: przy ręcznym
obracaniu serwosilnika wyświetlana
ilość impulsów nie zmienia się pro-
porcjonalnie do kąta obrotu, lecz
zmienia się skokowo lub cofa się.
Wymienić serwosilnik
8. Błędne podłączenie serwosilnika.
Zaciski U, V, W serwowzmacniacza
nie odpowiadają zaciskom U, V, W
serwosilnika.
Podłączyć prawidłowo
Tab. 10-5: Wykrywanie uszkodzeń (5)
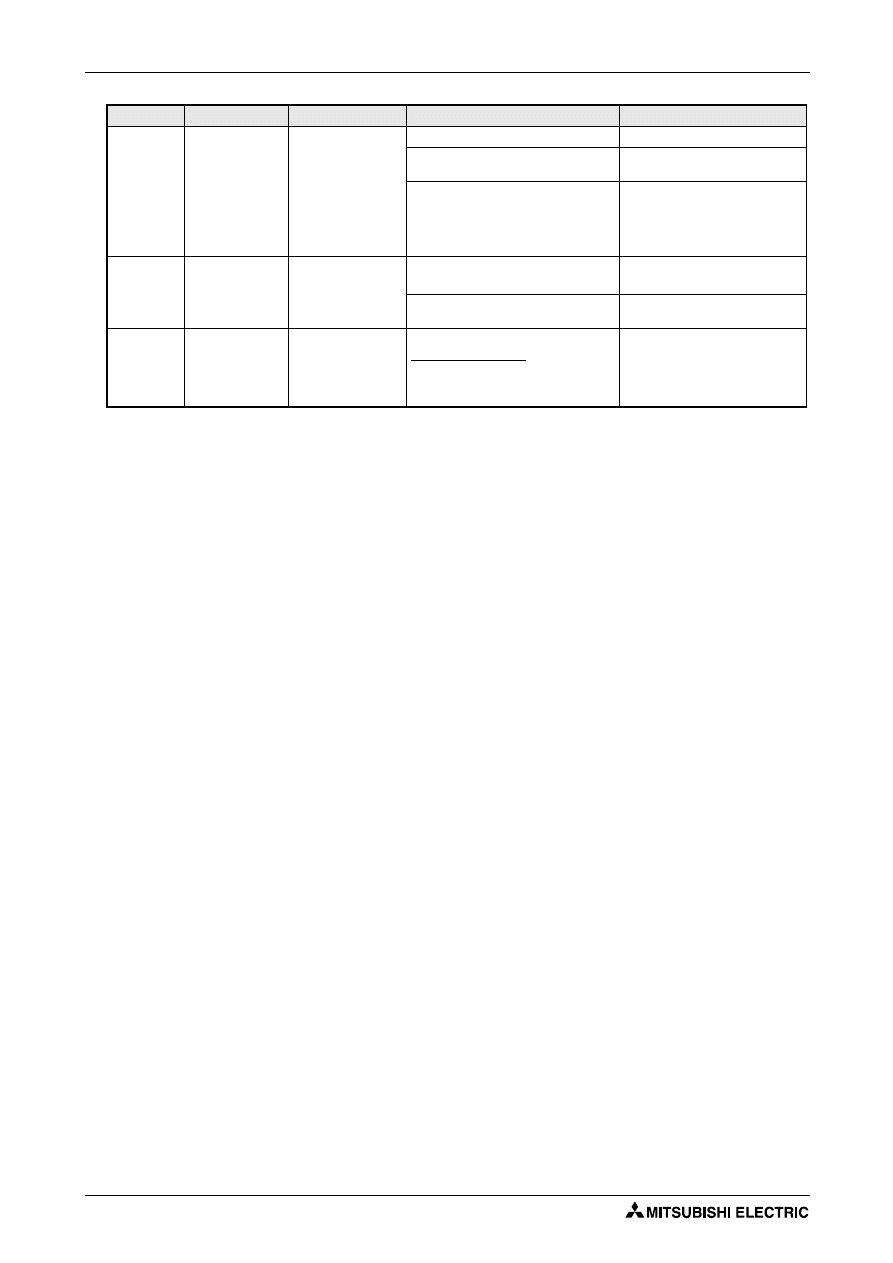
Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 14
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.8A
Time-out komuni-
kacji szeregowej
Wystąpiła przerwa w
komunikacji szere-
gowej RS-232C lub
RS-422 na czas
dłuższy od określo-
nego jako maksy-
malnie
dopuszczalny w
parametrze Pr. 56.
1. Uszkodzony kabel komunikacyjny
Naprawić lub wymienić kabel
2. Cykl komunikacji jest dłuższy, niż
przewidziano to w parametrze Pr. 56
Skorygować wartosć parametru
3. Błędny protokół komunikacji
Skorygować protokół
AL.8E
Błąd komunikacji
szeregowej
Wystąpił błąd komu-
nikacji szeregowej
między serwowzma-
cniaczem i PC.
1. Uszkodzony kabel komunikacyjny
(przerwa lub zwarcie jednej z żył).
Naprawić lub wymienić kabel
2. Błąd po stronie PC
Skorygować ustawienia,
wymienić PC
8888
Watchdog
Uszkodzenie CPU
Uszkodzony serwowzmacniacz.
Sposób sprawdzenia: Alarm (8888)
pojawia się przy załączeniu zasilania
przy rozłączonych złączach CN1A,
CN1B i CN3.
Wymienić serwowzmacniacz
Tab. 10-5: Wykrywanie uszkodzeń (6)
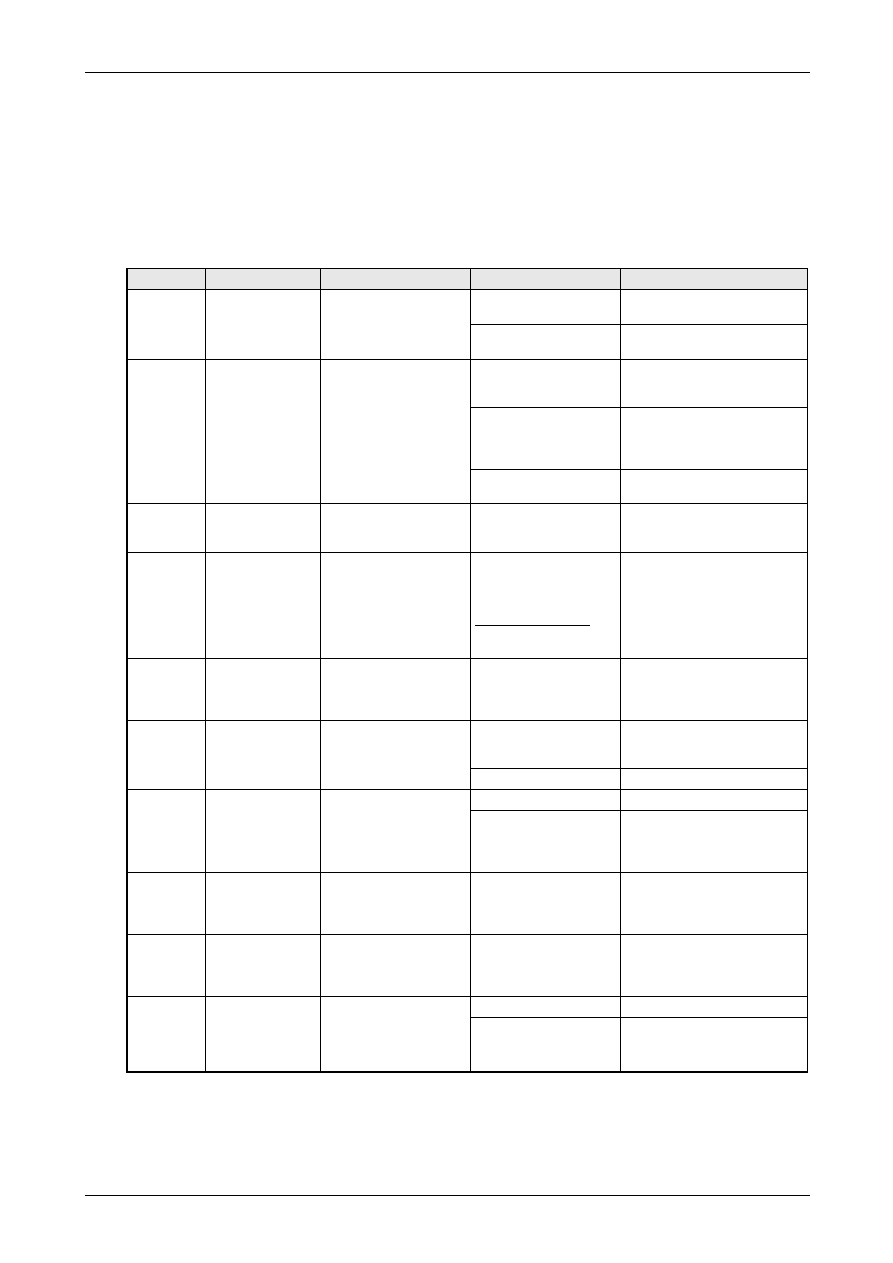
Komunikaty alarmów i ostrzeżeń
Wykrywanie i usuwanie usterek
Serwonapędy MELSERVO MR-J2Super-A
10 - 15
10.2.3 Komunikaty
ostrzeżeń i usuwanie ich przyczyn
Jeżeli wystąpi jedno z ostrzeżeń AL.E6 do AL.EA, serwowzmacniacz przechodzi w stan Servo-
off. W przypadku pozostałych ostrzeżeń praca serwowzmacniacza nie jest przerywana, jednak
należy pamiętać, że wystąpienie ostrzeżenia świadczy o niebezpieczeństwie wystąpienia alar-
mu lub nieprawidłowej pracy maszyny. Należy wykryć i usunąć przyczynę ostrzeżenia, kierując
się wskazówkami w kolumnie "Usuwanie" poniższej tabeli. Ustalenie przyczyny może być
ułatwione przez użycie oprogramowania narzędziowego na połączonym z serwonapędem PC.
Komunikat
Błąd
Opis
Przyczyna
Usuwanie
AL.92
Odłączona bateria
Napięcie zasilania sys-
temu pozycjonowania
absolutnego jest zbyt
niskie
1. Odłączony lub przer-
wany przewód baterii.
Podłączyć lub naprawić przewód
lub wymienić baterię
2. Napięcie baterii spadło
poniżej 2,8 V.
Wymienić baterię
AL.96
Błąd bazowania
Wykonanie bazowania
było niemożliwe
1. Uchyb jest większy niż
szerokość strefy "Pozyc-
jonowanie zakończone".
Usunąć przyczynę nadmiernego
uchybu
2. Po wyzerowaniu liczni-
ka impulsów uchybu
podano dalsze impulsy
zadające.
Zapewnić brak impulsów
zadających po wyzerowaniu licz-
nika uchybu.
3. Zbyt wysoka prędkość
dojścia
Zmniejszyć prędkość dojścia
AL.9F
Ostrzeżenie baterii
Napięcie zasilania syste-
mu pozycjonowania abso-
lutnego jest zbyt niskie.
Napięcie baterii spadło
poniżej 3,2 V.
Wymienić baterię
AL.E0
Ostrzeżenie przed
przeciążeniem
obwodu hamowa-
nia
Ostrzeżenie przed
alarmem AL.30
Obciążenie opornika
hamującego przekroczyło
85 % dopuszczalnej dla
niego wartości.
Sposób sprawdzenia:
Wyświetlić i sprawdzić
współczynnik obciążenia.
1. Wydłużyć czas cyklu.
2. Zastosować opornik hamujący
większej mocy.
3. Zredukować obciążenie
AL.E1
Ostrzeżenie przed
przeciążeniem
Istnieje niebezpieczeń-
stwo wystąpienia alarmu
AL.50/51
Obciążenie przekroczyło
85 % wartości określonej
dla alarmu przeciążenia 1/
2.
Patrz Alarm 50/51
AL.E3
Ostrzeżenie licz-
nika pozycji abso-
lutnej
Błędna wartość pozycji
absolutnej
1. Do enkodera przeni-
kają zakłócenia elektro-
magnetyczne.
Podjąć środki dla eliminacji
zakłóceń
2. Uszkodzenie enkodera
Wymienić serwosilnik
AL.E5
Time-out transmisji
danych ABS
Błędnie przesłane dane o
pozycji absolutnej.
1. Błąd w programie PLC
Skorygować program
2. Błędne podłączenie
zacisków CN1B-6 lub
CN1B-9 (sygnały ST2 lub
TLC)
Podłączyć prawidłowo
AL.E6
Zatrzymanie
awaryjne ser-
wonapędu
Rozłączony sygnał EMG.
Uaktywniono zewnętrzny
sygnał zatrzymania
awaryjnego (rozwarty styk
EMG)
Po sprawdzeniu bezpieczeństwa
wyłączyć wyłącznik awaryjny
(zewrzeć styk EMG)
AL.E9
Ostrzeżenie o
braku zasilania
obwodu głównego
Podano sygnał SON
(Servo-on) przy braku
zasilania obwodu
głównego.
Podano sygnał SON
(Servo-on) przy braku
zasilania obwodu
głównego.
Załączyć zasilanie obwodu
głównego
AL.EA
Ostrzeżenie o
braku sygnału
Servo-on podczas
transmisji ABS
Sygnał SON (Servo-on)
nie został załączony w
ciągu 1s od rozpoczęcia
transmisji danych o pozy-
cji absolutnej.
1. Błąd w programie PLC
Skorygować program
2. Błąd w podłączeniu
sygnału SON
Skorygować podłączenie
Tab. 10-6: Ostrzeżenia i usuwanie ich przyczyn

Wykrywanie i usuwanie usterek
Komunikaty alarmów i ostrzeżeń
10 - 16
NOTATKI:
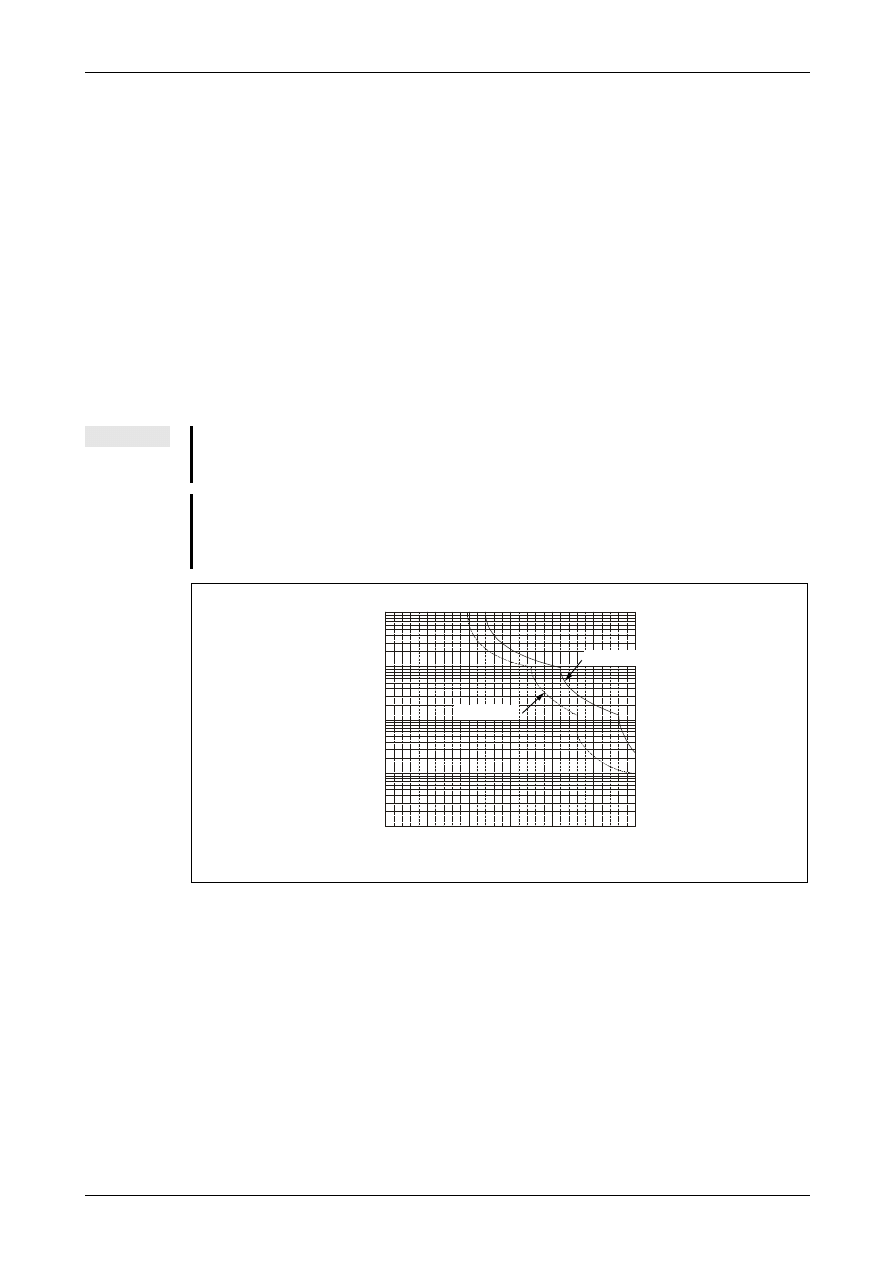
Charakterystyki energetyczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 1
11
Dane techniczne
11.1 Charakterystyki
energetyczne
11.1.1 Przeciążenia i zabezpieczenia przeciążeniowe
W serwowzmacniaczach zastosowano zabezpieczenia, monitorujące obciążenie i chroniące
serwowzmacniacz i serwosilnik przed przeciążeniem. Charakterystyki czasowe zabezpieczeń
przeciążeniowych przedstawiono poniżej na rysunkach Rys. 11-1, Rys. 11-2, Rys. 11-3. Należy
zapewnić, by obciążenie było stale utrzymywane w zakresie w lewo i poniżej od pokazanych na
rysunkach linii - ciągłej dla wirującego silnika i przerywanej dla zatrzymanego silnika. Alarm
przeciążeniowy 1 (AL.50) pojawia się gdy obciążenie w funkcji czasu przekracza dopuszczalny
zakres, pokazany na rysunkach . Alarm przeciążeniowy 2 ma miejsce bezzwłocznie, gdy prąd
przekroczy dopuszczalną wartość maksymalną, np. w wyniku kolizji w maszynie.
UWAGI
W aplikacjach dźwigowych itp., gdzie występuje niezrównoważony moment obciążenia, oraz
innych przypadkach,gdy przy zatrzymanym serwosilniku obecny jest moment obciążenia
zaleca się, by jego wartość nie przekraczała 70% momentu znamionowego serwosilnika.
Przy długotrwałym obciążeniu zatrzymanego lub pracującego z prędkością poniżej 30%
obrotów znamionowych serwosilnika momentem obciążenia przekraczającym 100%
momentu znamionowego może dojść do uszkodzenia serwowzmacniacza bez zadziałania
zabezpieczenia przeciążeniowego.
S000932C
Rys. 11-1: Charakterystyki obciążenia dla modeli MR-J2S-10A do MR-J2S-100A
0,1
1
10
100
1000
0
50
100
150
200
250
300
Obciążenie [%]
Czas p
racy [s]
W ruchu
Servo-lock
HC-KFS
HC-MFS
HC-SFS
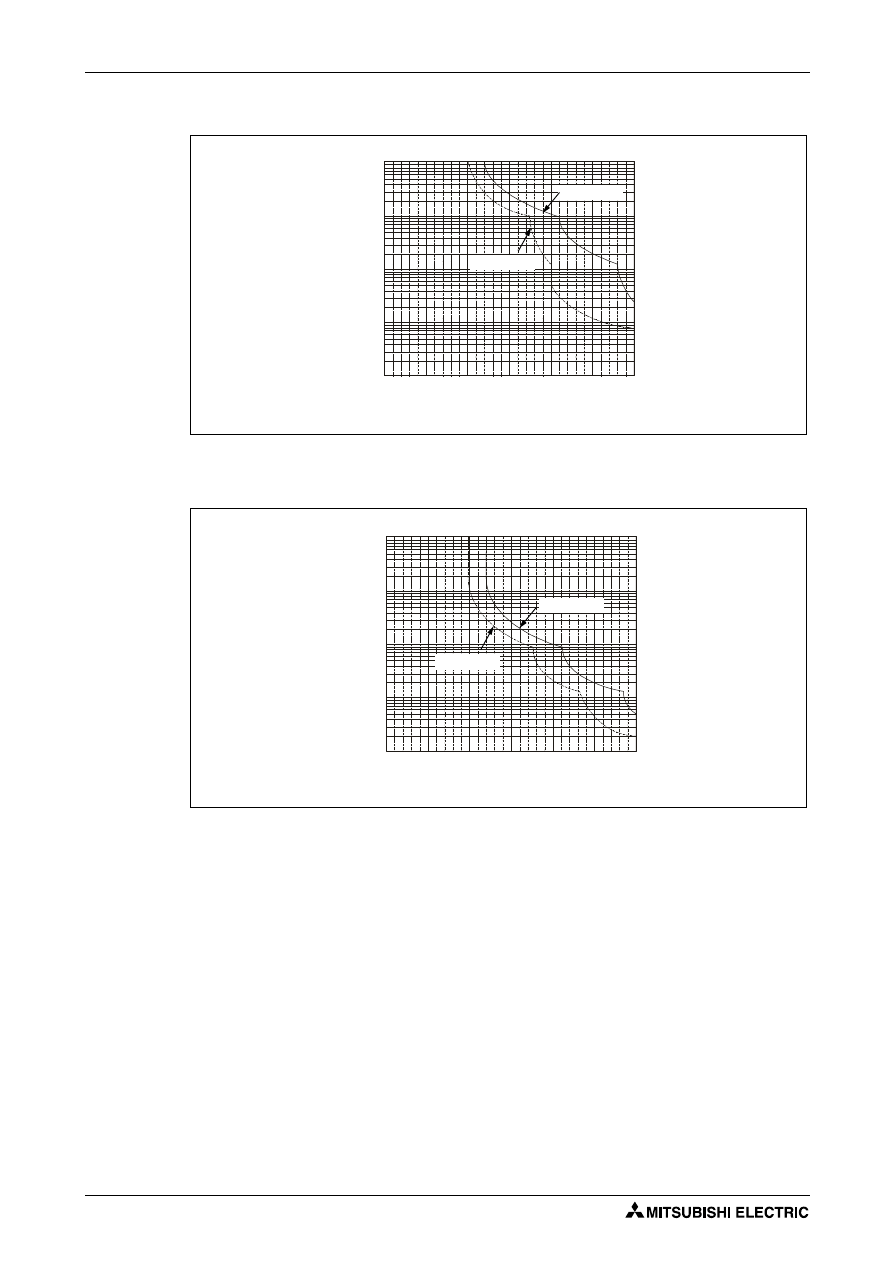
Dane techniczne
Charakterystyki energetyczne
11 - 2
S000933C
Rys. 11-2: Charakterystyki obciążenia dla modeli MR-J2S-200A do MR-J2S-350A
S000953C
Rys. 11-3: Charakterystyki obciążenia dla modeli MR-J2S-500A i MR-J2S-700A
0,1
1
10
100
1000
0
50
100
150
200
250
300
Obciążenie [%]
Czas pr
acy [s]
W ruchu
Servo-lock
HC-SFS
HC-RFS
1
10
100
1000
10000
0
50
100
150
200
250
300
Obciążenie [%]
Czas pracy [s]
W ruchu
Servo-lock
HC-SFS
HC-RFS
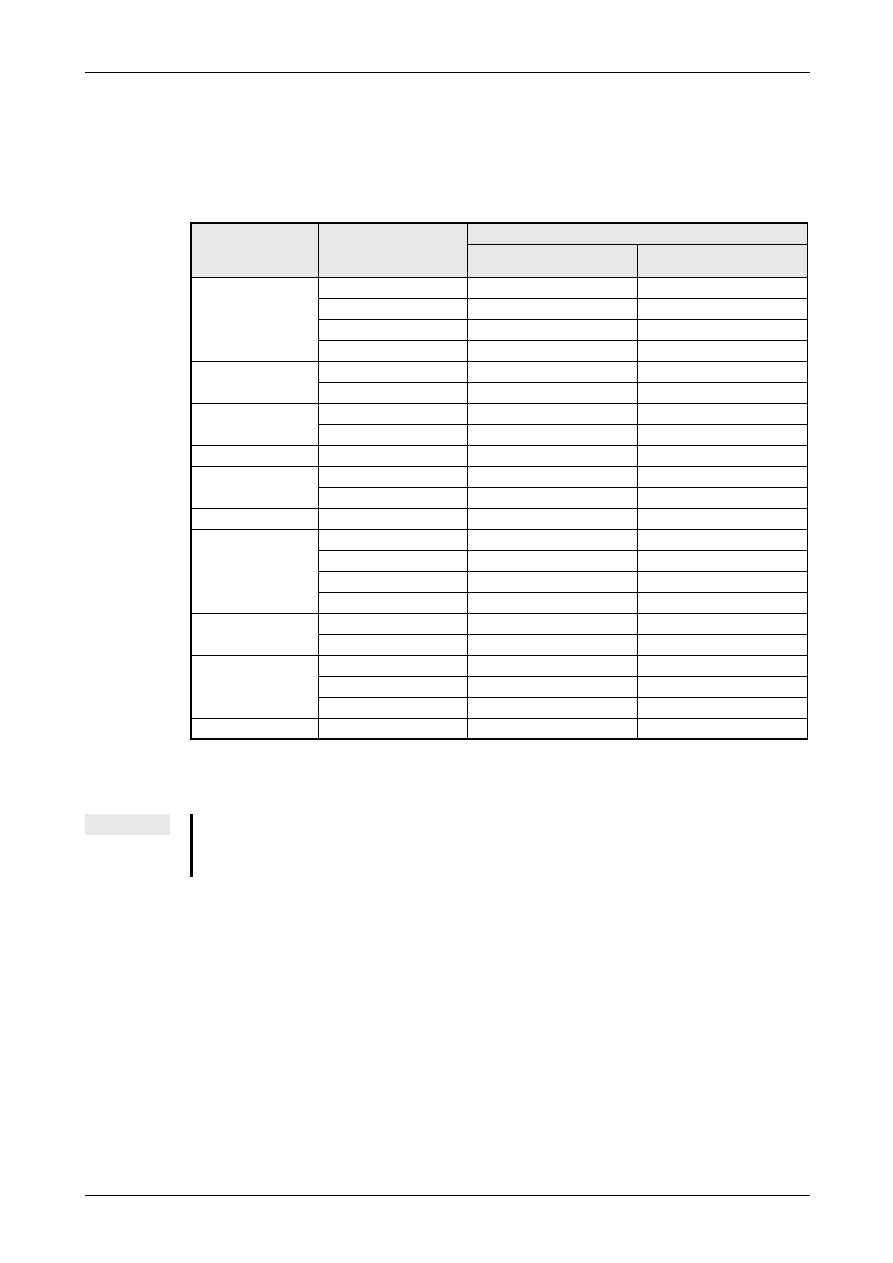
Charakterystyki energetyczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 3
11.1.2 Moc
strat
serwowzmacniacza
Straty zależne od serwowzmacniacza
W poniższej tabeli zestawiono wartości mocy traconej w serwowzmacniaczach poszczegól-
nych modeli przy obciążeniu znamionowym i bez obciążenia:
Serwowzmacniacz
Serwosilnik
Moc tracona [W]
przy obciążeniu znamio-
nowym
w stanie czuwania (servo-
off)
MR-J2S-10A
HC-KFS053
25
15
HC-KFS13
25
15
HC-MFS053
25
15
HC-MFS13
25
15
MR-J2S-20A
HC-KFS23
25
15
HC-MFS23
25
15
MR-J2S-40A
HC-KFS43
35
15
HC-MFS43
35
15
MR-J2S-60A
HC-SFS52
40
15
MR-J2S-70A
HC-KFS73
50
15
HC-MFS73
50
15
MR-J2S-100A
HC-SFS102
50
15
MR-J2S-200A
HC-SFS152
90
20
HC-SFS202
90
20
HC-RFS103
50
15
HC-RFS153
90
20
MR-J2S-350A
HC-SFS352
130
20
HC-RFS203
90
20
MR-J2S-500A
HC-SFS502
195
25
HC-RFS353
135
25
HC-RFS503
195
25
MR-J2S-700A
HC-SFS702
300
25
Tab. 11-1: Straty mocy w serwowzmacniaczach
UWAGA
W powyższym zestawieniu nie jest brane pod uwagę ciepło generowane w opornikach
hamujących w czasie hamowania regeneracyjnego . Aby je uwzględnić, należy wykorzystać
informacje i metody obliczeń , przedstawione w Rozdz. 8.1.1.
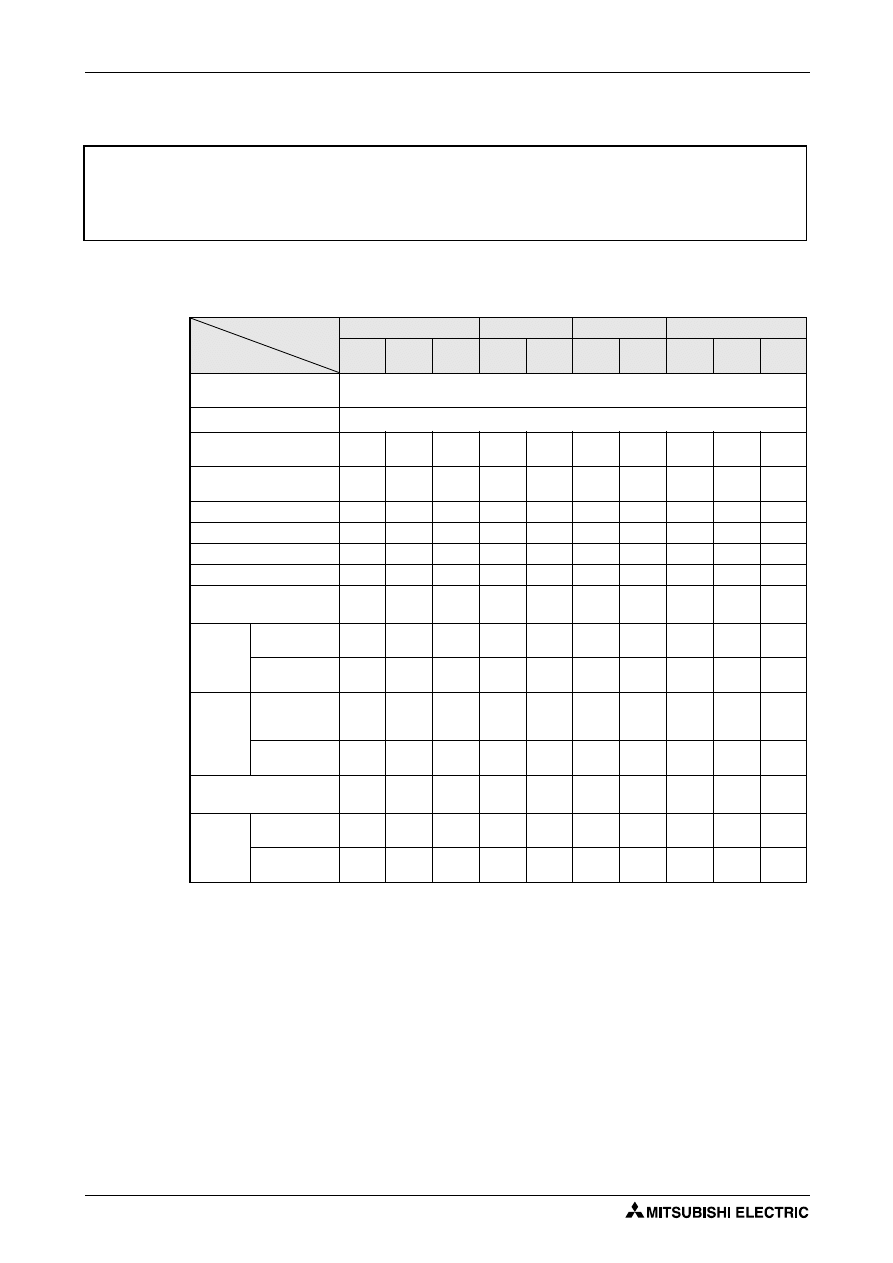
Dane techniczne
Charakterystyki energetyczne
11 - 4
11.1.3 Dane
techniczne
luzownika
W poniższej tabeli zebrano dane techniczne luzowników elektromagnetycznych, stosowanych
w serwosilnikach:
a
Luzownik nie posiada mechanizmu do ręcznego zwalniania. W przypadku konieczności
zwolnienia, np. dla ręcznego obrócenia wałem silnika niezbędne jest podłączenie zasilania
24V DC i zwolnienie elektryczne. .
b
Czas zwłoki dla nowego urządzenia, przy temperaturze 20 °C.
c
Zwłoka powiększa się w miarę zużycia okładzin ciernych. Luzownik nie posiada możliwości
regulacji szczeliny przez użytkownika. Wskazany czas życia jest okresem, po którym
wymagana jest regulacja.
d
Nie dopuszcza się użycia wewnętrznego zasilacza 24 V DC serwowzmacniacza,
przeznaczonego dla interfejsów. Należy użyć zewnętrznego źródła zasilania.
e
Podane wartości są wartościami średnimi, a nie gwarantowanymi.
!
OSTRZEŻENIE:
Luzownik służy do utrzymywania wału silnika w stanie zatrzymanym. Nie należy go
używać do hamowania silnika będącego w ruchu!
Serwosilnik
Seria HC-MFS
Seria HC-SFS
Seria HC-RFS
Seria HC-KFS
Dane
053B
13B
23B
43B
73B
052B–
152B
202B–
702B
103B–
203B
353B
503B
053B
13B
23B
43B
73B
Typ
a
Elektromagnetyczny hamulec tarczowy (zaciskany sprężynowo, zwalniany elektry-
cznie)
Napięcie znamionowe
d
24 V DC, +0 %/
−10 %
Prąd znamionowy przy 20
°C [A]
0,26
0,33
0,42
0,8
1,4
0,8
0,96
0,26
0,33
0,42
Rezystancja uzwojenia
przy 20 °C [
Ω]
91
73
57
29
16,8
30
25
91
73
57
Moc [W]
6,3
7,9
10
19
34
19
23
6,3
7,9
10
Prąd zadziałania [A]
0,18
0,18
0,2
0,2
0,4
0,25
0,24
0,18
0,18
0,2
Prąd zwolnienia [A]
0,06
0,11
0,12
0,08
0,2
0,085
0,10
0,06
0,11
0,12
Moment tarcia [Nm]
0,32
1,3
2,4
8,3
43,1
6,8
16,7
0,32
43,1
2,4
Czas zwłoki zwolnienia
[s]
b
0,03
0,03
0,03
0,04
0,1
0,03
0,04
0,03
0,1
0,03
Czas
zwłoki
zaciśnię-
cia [s]
bc
Wyłączenie AC
Rys. 11-4 (a)
0,08
0,1
0,12
0,12
0,12
0,12
0,12
0,08
0,12
0,12
Wyłączenie DC
Rys. 11-4 (b,c)
0,01
0,02
0,03
0,03
0,03
0,03
0,03
0,01
0,03
0,03
Dopusz-
czalna
energia
hamowa-
nia [Nm]
na jedno
hamowanie
5,6
22,0
64,0
400
4500
400
400
5,6
22,0
64
na godzinę
56
220
640
4000
45000
4000
4000
56
220
640
Luz zatrzymanego wału
silnika [stopni]
e
0,19–
2,5
0,12–
1,2
0,1–0,9 0,2–0,6 0,2–0,6 0,2–0,6 0,2–0,6 0,19–
2,5
0,12–
1,2
0,1–0,9
Czas
życia
luzow-
nika
c
Ilość cykli
hamowania
20000
20000
20000
20000
20000
20000
20000
20000
20000
20000
przy energii na
jeden cykl [Nm]
4
15
32
200
1000
200
200
4
15
32
Tab. 11-2: Dane techniczne luzowników elektromagnetycznych
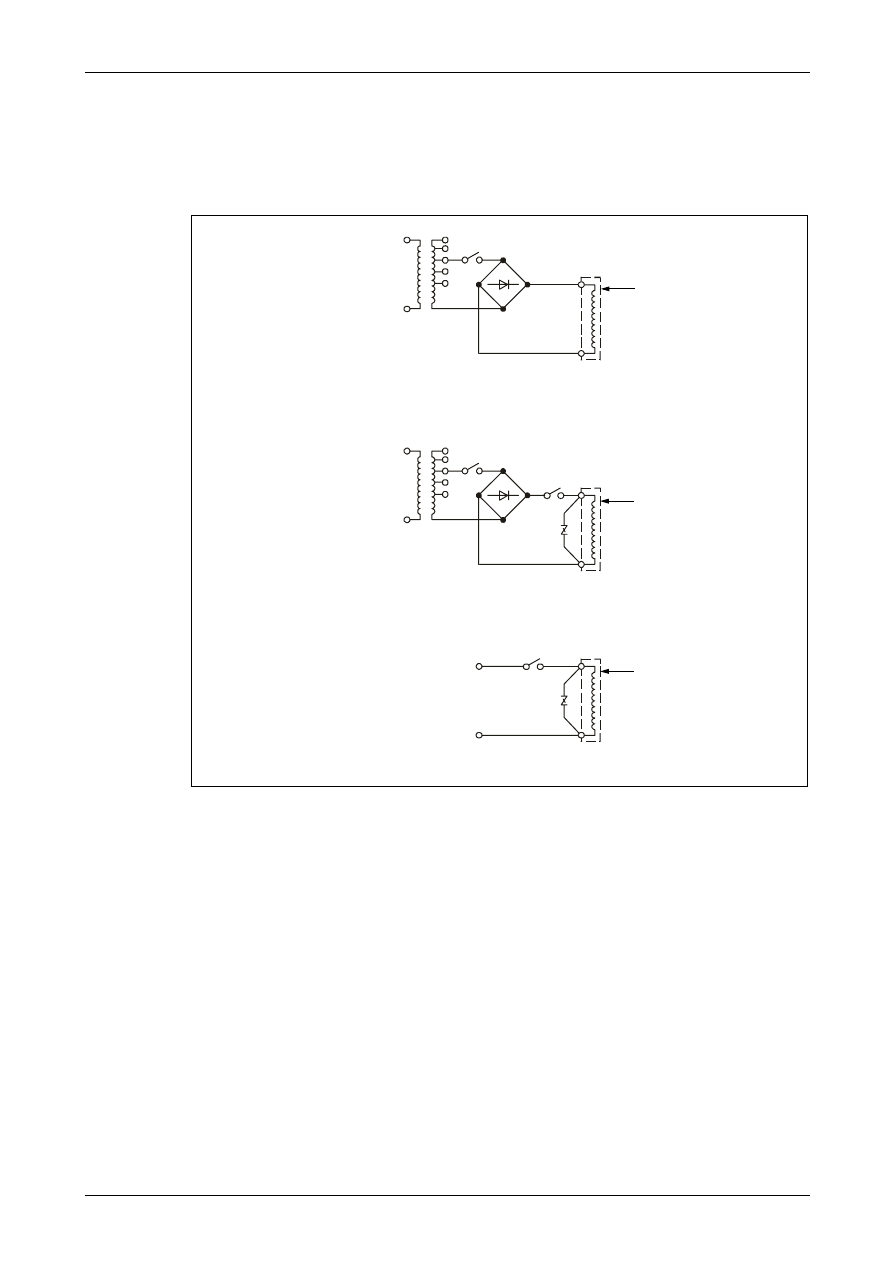
Charakterystyki energetyczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 5
Zasilanie luzownika
Wewnętrzny zasilacz 24 V DC serwowzmacniacza przeznaczony jest do zasilania jego inter-
fejsów i niedopuszczalne jest jego użycie do zasilania luzownika. Należy użyć zewnętrznego
zasilacza. Przykłady rozwiązań zasilania luzownika przedstawiono na poniższych schematach.
Przy wyłączniku umieszczonym po stronie napięcia stałego (rysunki (b), (c)) czas zwłoki jest
krótszy, ale niezbędne jest zastosowanie warystora tłumiącego przepięcia.
Dalsze informacje o luzownikach zamieszczone są w podręczniku obsługi serwosilników.
S000656C
Rys. 11-4: Obwody zasilania luzownika
28 V AC
24 V DC
T
T
VAR
VAR
28 V AC
Luzownik
elektromagnetyczny
Luzownik
elektromagnetyczny
Luzownik
elektromagnetyczny
T
: Transformator
VAR : Warystor
(a)
(b)
(c)
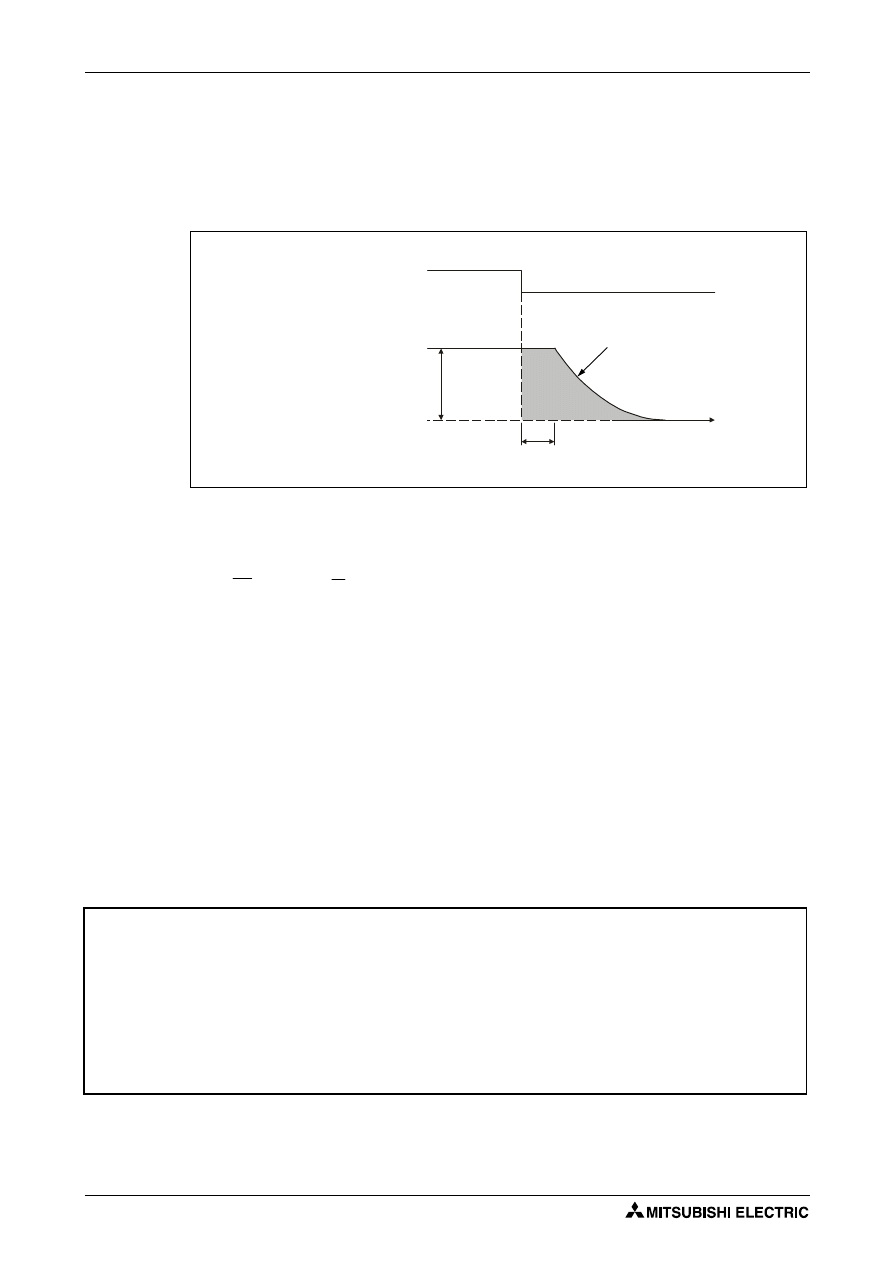
Dane techniczne
Charakterystyki energetyczne
11 - 6
11.1.4 Hamowanie
dynamiczne
W przypadku alarmu, zatrzymania awaryjnego (sygnał EMG) lub zaniku zasilania serwosilnik
jest gwałtownie hamowany przez zwarcie uzwojeń jego stojana przez wbudowane w serwow-
zmacniaczu oporniki hamowania dynamicznego. Na Rys. 11-5 pokazano wykres czasowy
hamowania dynamicznego.
Przemieszczenie podczas wybiegu serwosilnika można wyliczyć z wyrażenia:
gdzie:
L
max
: maksymalne przemieszczenie podczas wybiegu serwosilnika [mm]
V
0
: Prędkość liniowa maszyny [mm/min]
J
M
: Moment bezwładności serwosilnika [kgcm
2
]
J
L
: Moment bezwładności obciążenia, sprowadzony do wału serwosilnika [kgcm
2
]
τ
: Stała czasowa hamowania [s]
t
e
: Zwłoka obwodów sterowania [s] (Czas przełączania wewnętrznych przekaźników, równy
około 30 ms)
S000657C
Rys. 11-5: Hamowanie dynamiczne
!
OSTRZEŻENIE:
Hamowania dynamicznego można bezpiecznie używać dla serwowzmacniaczy MR-
J2S-10A do MR-J2S-200A tylko przy wartości ilorazu momentu bezwładności obcią-
żenia do momentu bezwładności serwosilnika nie większej niż 30, dla serwowzmac-
niaczy MR-J2S-350A - nie większej niż 16 i dla serwowzmacniaczy MR-J2S-500A i MR-
J2S-700A - nie większej niż 15. Przy wyższej wartości ilorazu momentu bezwładności
obciążenia do momentu bezwładności serwosilnika dojdzie do przegrzewania oporni-
ków i niebezpieczeństwa pożaru. Jeżeli istnieje podejrzenie, że podane wartości są
przekroczone, prosimy o kontakt z przedstawicielstwem Mitsubishi Electric.
V
0
te
t
Stop awar(EMG)
ON
OFF
Prędkość
maszyny
Stała czasowa
τ
L
V
0
60
max
=
(
1 +
)
J
L
J
M
{
te +
τ
}
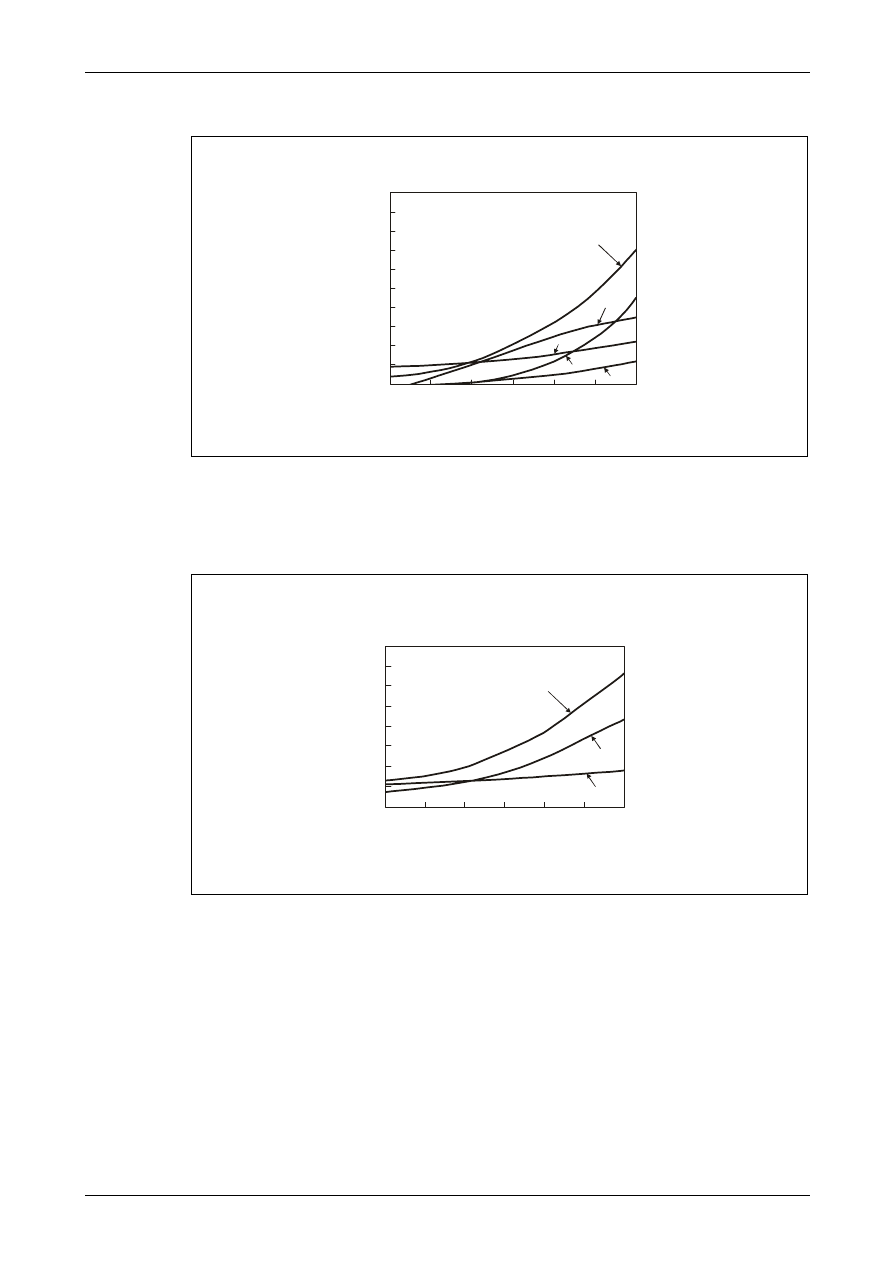
Charakterystyki energetyczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 7
S000958C
Rys. 11-6: Wartość stałej czasowej hamowania dynamicznego dla serwosilników serii HC-
MFS
S000959C
Rys. 11-7: Wartość stałej czasowej hamowania dynamicznego dla serwosilników serii HC-KFS
0
0,002
0,004
0,006
0,008
0,010
0,012
0,014
0,016
0,018
0,020
0
500
1000 1500 2000 2500 3000
23
73
053
43
13
Sta
ła czasowa
τ
τ
[s]
Prędkość [obr/min]
2
4
6
8
10
12
14
16
0
0
500
1000 1500
2500 3000
2000
23
43
13
Sta
ła czasowa
τ
τ
[s]
Prędkość [obr/min]
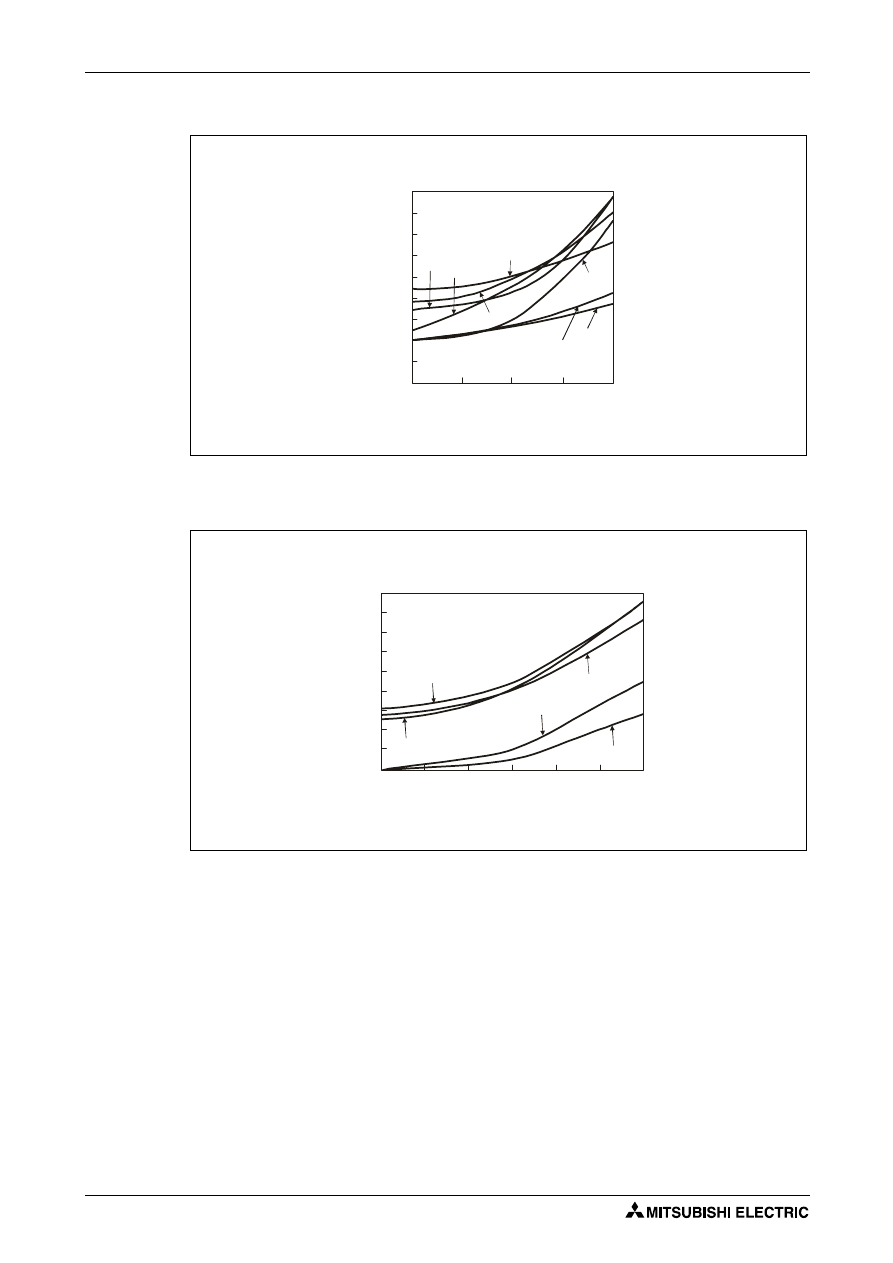
Dane techniczne
Charakterystyki energetyczne
11 - 8
S000960C
Rys. 11-8: Wartość stałej czasowej hamowania dynamicznego dla serwosilników serii HC-SFS
S000961C
Rys. 11-9: Wartość stałej czasowej hamowania dynamicznego dla serwosilników serii HC-RFS
0
0,005
0,010
0,015
0,020
0,025
0,030
0,035
0,040
0,045
0
500
2000
1500
1000
702
352
202
502
152
102
52
Sta
ła cza
sowa
τ
τ
[s]
Prędkość [obr/min]
0
0,002
0,004
0,006
0,008
0,010
0,012
0,014
0,016
0,018
0
500
1500
2500
3000
1000
2000
103
153
353
503
203
Sta
ła czaso
w
aτ
τ
[s]
Prędkość [obr/min]
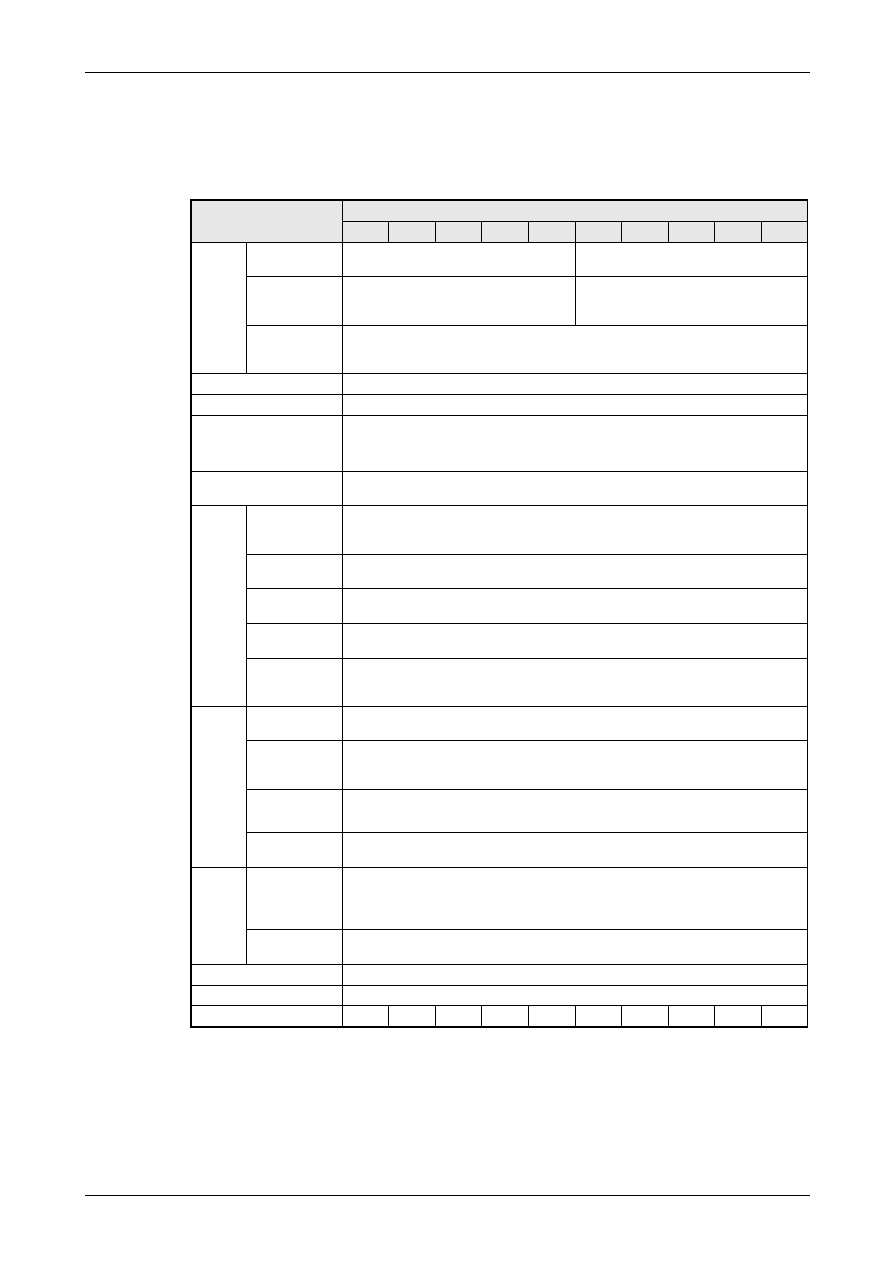
Ogólne dane techniczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 9
11.2
Ogólne dane techniczne
11.2.1 Serwowzmacniacz
Serwowzmacniacz MR-J2S-m
10A
20A
40A
60A
70A
100A
200A
350A
500A
700A
Zasilanie Napięcie/
Częstotliwość
3~, 200–230 V AC, 50Hz/60 Hz
1~, 230 V AC, 50/60 Hz
3~, 200–230 V AC, 50Hz/60 Hz
Dopuszczalny
zakres wahań
napięcia
3~, 170–253 V AC
1~, 207–253 V AC
3~, 170–253 V AC
Dopuszczalny
zakres wahań
częstotliwości
±5 %
System sterowania
Sinusoidalna modulacja PWM
Hamulec dynamiczny
Wbudowany
Zabezpieczenia
Nadprądowe, przepięciowe, podnapięciowe, przed zanikiem zasilania, przeciążeniowe
(elektroniczny przekaźnik termiczny), przed nadmierną prędkością, zabezpieczenie
termiczne serwosilnika, zabezpieczenie przeciążeniowe układu hamowania, kontrola
sprawności enkodera, kontrola uchybu położenia
Pasmo przenoszenia (re-
gulacja prędkości)
≥ 550Hz
Regu-
lacja
położe-
nia
Max. częstotli-
wość ciągu
impulsów
500 kHz (wejście różnicowe), 200 kHz (otwarty kolektor)
Przetwornik
położenia
Rozdzielczość na obrót serwosilnika: 131072 impulsów/obrót
Przekładnia ele-
ktroniczna
Przekładnia elektroniczna: A/B; A: 1–65535 lub 131072, B: 1–65535, 1/50 < A/B <500
Max. dopusz-
czalny uchyb
±10 obrotów
Ograniczenie
momentu obro-
towego
Zadawane wartością parametru lub przez sygnałem analogowym (0–±10 V DC / max.
moment obrotowy)
Regu-
lacja
pręd-
kości
Zakres regulacji
momentu
Zadawanie analogowe 1 : 2000,
Zadawanie wewnętrzne (prędkości programowane wartościami parametrów) 1 : 5000
Zadawanie
sygnałem analo-
gowym
0–±10 V DC / prędkość znamionowa
Niestabilność
prędkości
±0,01 % lub mniej (przy zmianach obciążenia 0 do 100%)
0 % (przy zmianach napięcia zasilającego ±10 %)
±0,2 % max. (przy temperaturze otoczenia 25 °C ± 10 °C), przy zadawaniu analogowym
Ograniczenie
momentu
Zadawane wartością parametru lub przez sygnałem analogowym (0–±10 V DC / max.
moment obrotowy)
Regu-
lacja
momentu
Zadawanie
momentu
sygnałem analo-
gowym
0–±8 V DC / maksymalny moment obrotowy (oporność wejściowa 10 do 12 k
Ω)
Ograniczenie
prędkości
Zadawane wartością parametru lub przez sygnałem analogowym (0–±10 V DC / pręd-
kosć znamionowa)
Stopień ochrony
obudowa otwarta (IP00)
Warunki środowiskowe
Patrz Rozdz. 2.1
Masa [kg]
0,7
0,7
1,1
1,1
1,7
1,7
2,0
2,0
4,9
7,2
Tab. 11-3: Ogólne dane techniczne serwowzmacniaczy
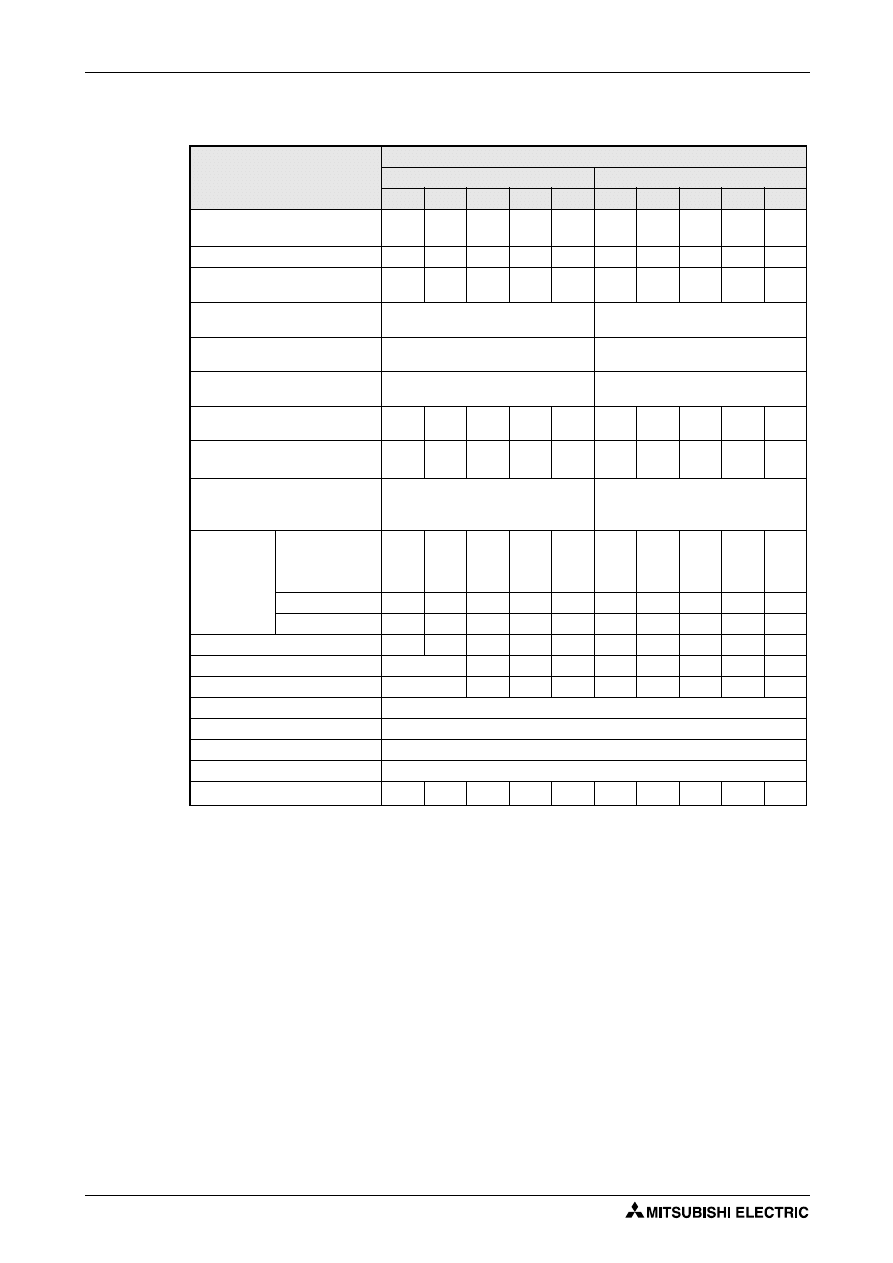
Dane techniczne
Ogólne dane techniczne
11 - 10
11.2.2 Serwosilniki
Model serwosilnika
Seria HC-MFS
Seria HC-KFS
053
13
23
43
73
053
13
23
43
73
Odpowiedni serwowzmacniacz
MR-J2S-
10A
10A
20A
40A
70A
10A
10A
20A
40A
70A
Znamionowa moc wyjściowa [kW]
0,05
0,1
0,2
0,4
0,75
0,05
0,1
0,2
0,4
0,75
Znamionowy moment obrotowy
[Nm]
0,16
0,32
0,64
1,3
2,4
0,16
0,32
0,64
1,3
2,4
Znamionowa prędkość obrotowa
[obr/min]
3000
3000
Maksymalna prędkość obrotowa
[obr/min]
4500
4500
Najwyższa dopuszczalna prędkość
obrotowa [obr/min]
5175
5175
Maksymalny moment obrotowy
[Nm]
0,48
0,95
1,9
3,8
7,2
0,48
0,95
1,9
3,8
7,2
Moment bezwładności J
[kg x cm
2
]
d
0,019
0,03
0,088 0,143
0,6
0,053 0,084
0,42
0,67
1,51
Zalecany iloraz momentu bezwład-
ności obciążenia do momentu
bezwładności serwosilnika
c
≤ 30
≤ 10
Ilość cykli
hamowania
regeneracyj-
nego [na
minutę]
a
z opornikiem
hamującym wbu-
dowanym w ser-
wowzmacniaczu
b
b
b
1010
400
b
b
b
220
190
MR-RB032 (30 W)
—
—
—
3000
600
b
b
b
660
280
MR-RB12 (100 W)
—
—
—
b
2400
b
b
b
2200
940
Moc pozorna zasilania [kVA]
0,3
0,3
0,5
0,9
1,3
0,3
0,3
0,5
0,9
1,3
Prąd znamionowy [A]
0,85
1,5
2,8
5,1
0,83
0,83
1,1
2,3
5,8
Prąd maksymalny [A]
2,6
5,0
9,0
18
2,5
2,5
3,4
6,9
18,6
Przetwornik położenia/prędkości
Enkoder (rozdzielczość: 131072 impulsów/obrót)
Stopień ochrony
IP55
Chłodzenie
Naturalne
Warunki środowiskowe
Patrz Rozdz. 2.1
Masa [kg]
d
0,4
0,53
0,99
1,45
3,0
0,4
0,53
0,99
1,45
3,0
Tab. 11-4: Ogólne dane techniczne serwosilników
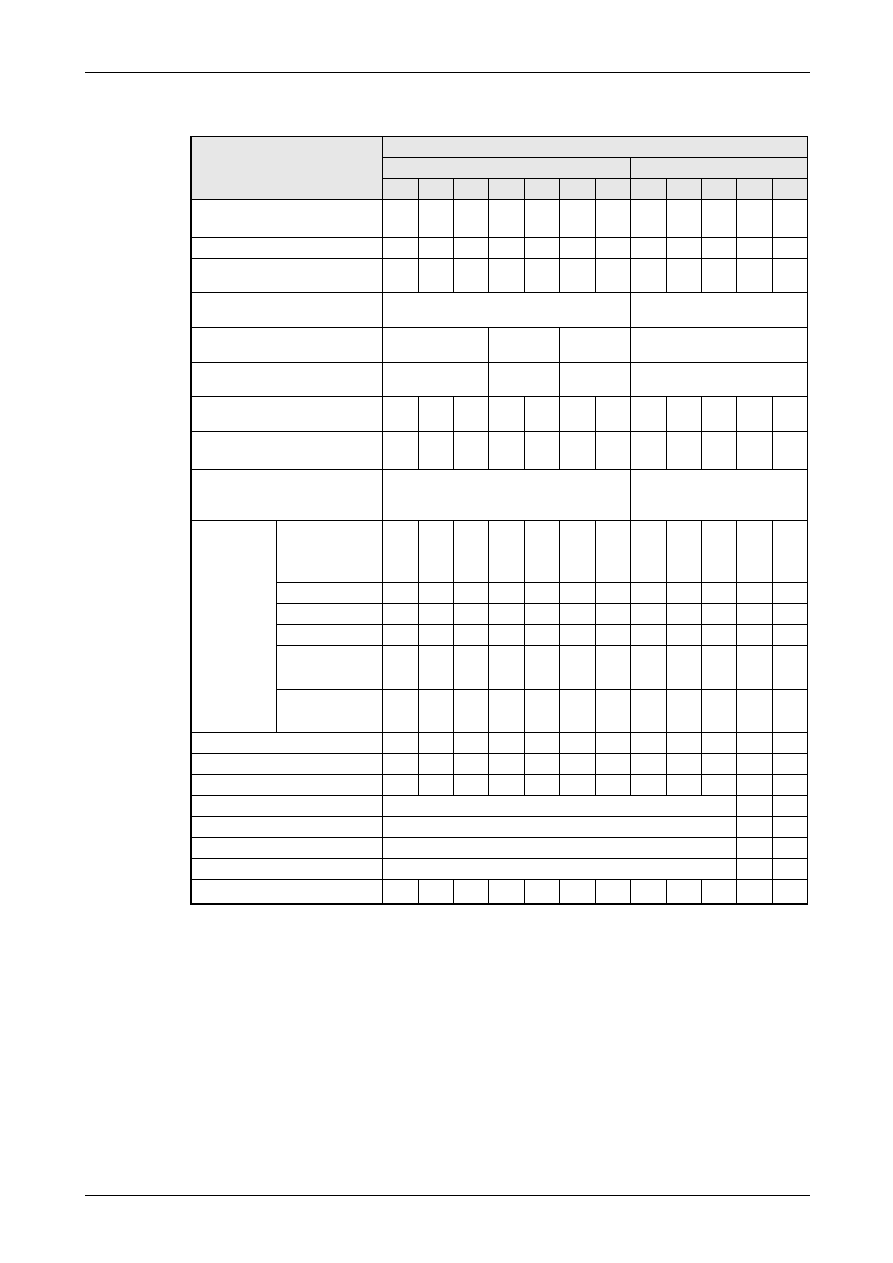
Ogólne dane techniczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 11
a
Podana ilość cykli hamowania dotyczy hamowania nie obciążonego silnika od prędkości
znamionowej do zatrzymania. Dla silnika obciążonego należy podaną wartość przemnożyć
przez współczynnik 1/(m + 1) , gdzie m jest ilorazem momentu bezwładności obciążenia do
momentu bezwładności serwosilnika. Jeżeli hamowanie rozpoczyna się od prędkości
wyższej, niż znamionowa, podana wartość zmienia się odwrotnie proporcjonalnie do
kwadratu ilorazu prędkości początkowej hamowania do prędkości znamionowej.
b
Jeśli średniokwadratowa wartość momentu przekracza momentu znamionowego ser-
wosilnika, ilość cykli hamowania nie jest ograniczona.
c
Gdy podany warunek nie może być zachowany prosimy o kontakt z przedstawicielstwem
Mitsubishi Electric.
d
W przypadku silników z wbudowanym luzownikiem elektromagnetycznym odpowiednie
dane należy pobrać z Tab. 11-2.
Model serwosilnika
Seria HC-SFS
Seria HC-RFS
52
102
152
202
352
502
702
103
153
203
353
503
Odpowiedni serwowzmacniacz
MR-J2S-
60A 100A 200A 200A 350A 500
700 200A 200A 350A 500
500
Znamionowa moc wyjściowa [kW]
0,5
1,0
1,5
2,0
3,5
5,0
7
1,0
1,5
2,0
3,5
5,0
Znamionowy moment obrotowy
[Nm]
2,39 4,78 7,16 9,55 16,7 23,9 33,4 3,18 4,78 6,37 11,1 15,9
Znamionowa prędkość obrotowa
[obr/min]
2000
3000
Maksymalna prędkość obrotowa
[obr/min]
3000
2500
2000
4500
Najwyższa dopuszczalna prędkość
obrotowa [obr/min]
3450
2850
2300
5175
Maksymalny moment obrotowy
[Nm]
7,16 14,4 21,6 28,5 50,1 71,6
100
7,95 11,9 15,9 27,9 39,7
Moment bezwładności J
[kg x cm
2
]
d
6,6
13,7 20,0 42,5
82
101
160
1,5
1,9
2,3
8,6
12
Zalecany iloraz momentu bezwład-
ności obciążenia do momentu
bezwładności serwosilnika
c
≤ 15
≤ 5
Ilość cykli
hamowania
regeneracyj-
nego [na
minutę]
a
z opornikiem
hamującym wbu-
dowanym w ser-
wowzmacniaczu
56
54
136
64
31
39
32
1090 860
710
174
125
MR-RB032 (30 W) 165
80
—
—
—
—
—
—
—
—
—
—
MR-RB12 (100 W) 560
270
—
—
—
—
—
—
—
—
—
—
MR-RB32 (300 W) 1680 810
—
—
—
—
—
—
—
—
—
—
MR-RB30 (300 W)
—
—
408
192
95
90
57
(MR-
RB31)
3270 2580 2130 401
288
(MR-
RB31)
MR-RB50 (500 W)
—
—
680
320
158
150
95
(MR-
RB51)
5450 4300 3550 669
479
(MR-
RB51)
Moc pozorna zasilania [kVA]
1,0
1,7
2,5
3,5
5,5
7,5
10
1,7
2,5
3,5
5,5
7,5
Prąd znamionowy [A]
3,2
6
9
11
17
28
35
6,1
8,8
14
23
28
Prąd maksymalny [A]
9,6
18
27
33
51
84
105
18,4 23,4
37
58
70
Przetwornik położenia/prędkości
Enkoder (rozdzielczość: 131072 impulsów/obrót)
Stopień ochrony
IP65
Chłodzenie
Naturalne
Warunki środowiskowe
Patrz Rozdz. 2.1
Masa [kg]
d
5,0
7,0
9,0
12,0 19,0
23
32
3,9
5,0
6,2
12,0 17,0
Tab. 11-5: Ogólne dane techniczne serwosilników
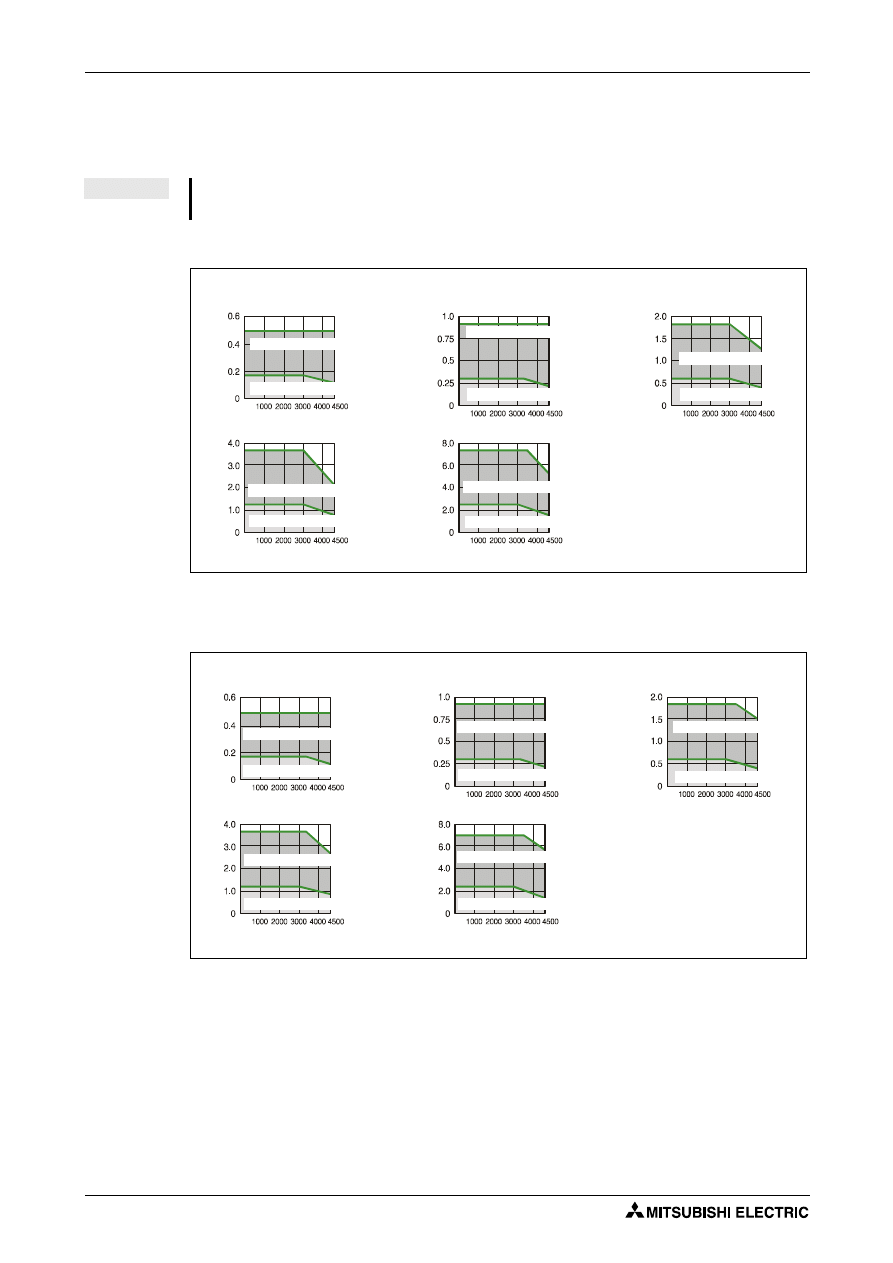
Dane techniczne
Ogólne dane techniczne
11 - 12
11.2.3
Charakterystyki momentu obrotowego
UWAGA
W przypadku długotrwałego obciążania zatrzymanego serwosilnika moment obciążenia nie
może przekraczać 70 % momentu znamionowego.
S000934C
Rys. 11-10: Charakterystyki momentu obrotowego dla serwosilników serii HC-MFS
S000935C
Rys. 11-11: Charakterystyki momentu obrotowego dla serwosilników serii HC-KFS
HC-MFS13 (B)
HC-MFS053 (B)
HC-MFS43 (B)
HC-MFS73 (B)
HC-MFS23 (B)
M
ome
nt ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Mom
en
t o
br
.
[N
m]
M
ome
nt ob
r.
[N
m
]
Moment szczytowy
Moment szczytowy
Moment szczytowy
Moment szczytowy
Moment szczytowy
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
HC-KFS13 (B)
HC-KFS053 (B)
HC-KFS43 (B)
HC-KFS23 (B)
HC-KFS73 (B)
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r. [
N
m]
Mo
me
nt
ob
r. [
N
m]
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Moment szczytowy
Moment znamionowy
Moment szczytowy
Moment szczytowy
Moment szczytowy
Moment szczytowy
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
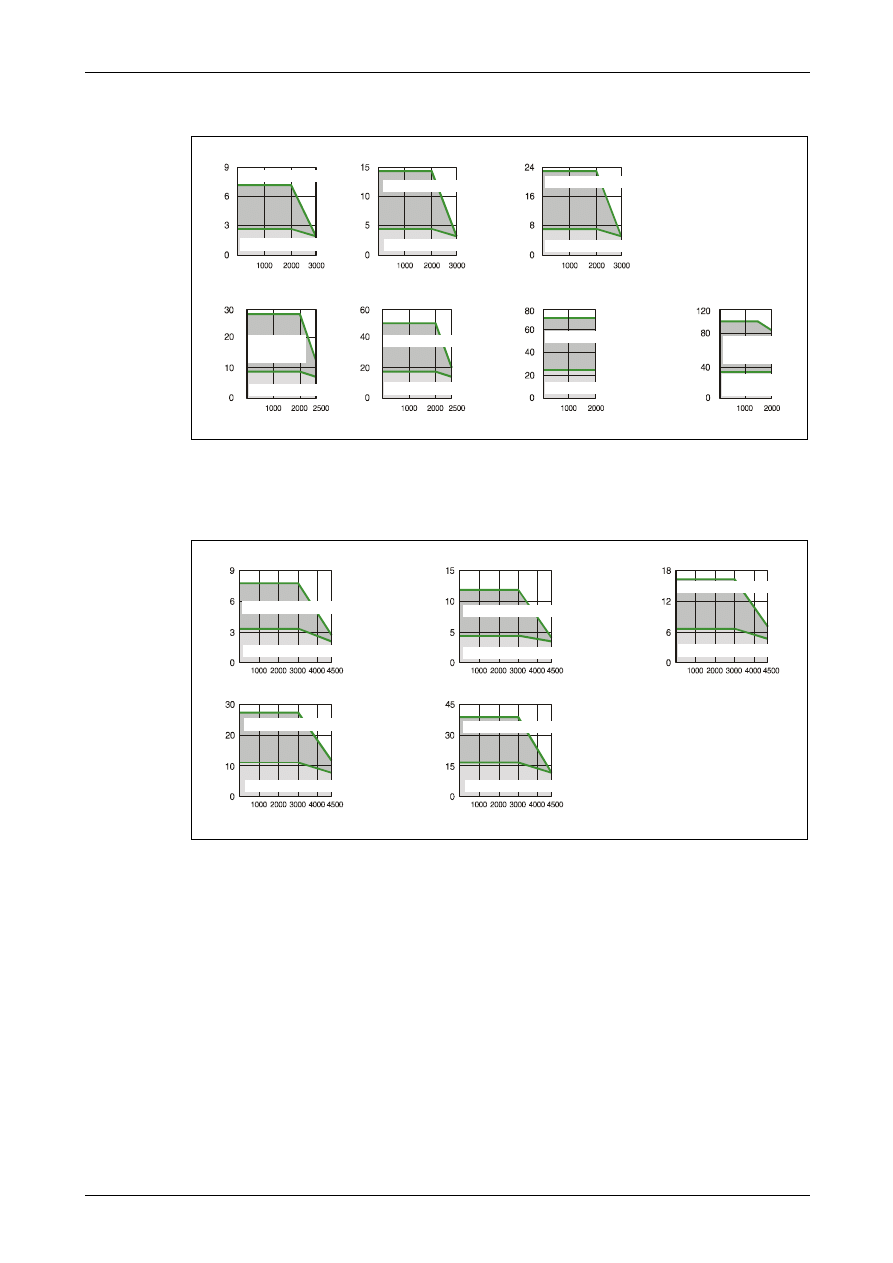
Ogólne dane techniczne
Dane techniczne
Serwonapędy MELSERVO MR-J2Super-A
11 - 13
S000936C
Rys. 11-12: Charakterystyki momentu obrotowego dla serwosilników serii HC-SFS
S000937C
Rys. 11-13: Charakterystyki momentu obrotowego dla serwosilników serii HC-RFS
HC-SFS152 (B)
HC-SFS202 (B)
HC-SFS202 (B)
HC-SFS502 (B)
HC-SFS702 (B)
HC-SFS52 (B)
HC-SFS102 (B)
Mo
m
ent
ob
r.
[N
m
]
Mo
m
ent
ob
r.
[N
m
]
Mo
me
nt
ob
r. [
N
m]
M
ome
n
t o
br
. [N
m]
Mo
me
nt
ob
r.
[N
m
]
Moment szczytowy
Moment szczytowy
Moment szczytowy
Moment szczytowy
Moment
szczytowy
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Mo
me
nt
ob
r. [
N
m]
Mo
m
ent
ob
r.
[N
m
]
Moment szczytowy
Moment
szczytowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment
znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
HC-RFS103 (B)
HC-RFS353 (B)
HC-RFS153 (B)
HC-RFS503 (B)
HC-RFS203 (B)
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Moment szczytowy
Moment szczytowy
Moment szczytowy
Prędkość [obr/min]
Prędkość [obr/min]
Prędkość [obr/min]
Moment szczytowy
Moment szczytowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
Moment znamionowy
Mo
me
nt
ob
r.
[N
m
]
Mo
me
nt
ob
r.
[N
m
]
Prędkość [obr/min]
Prędkość [obr/min]
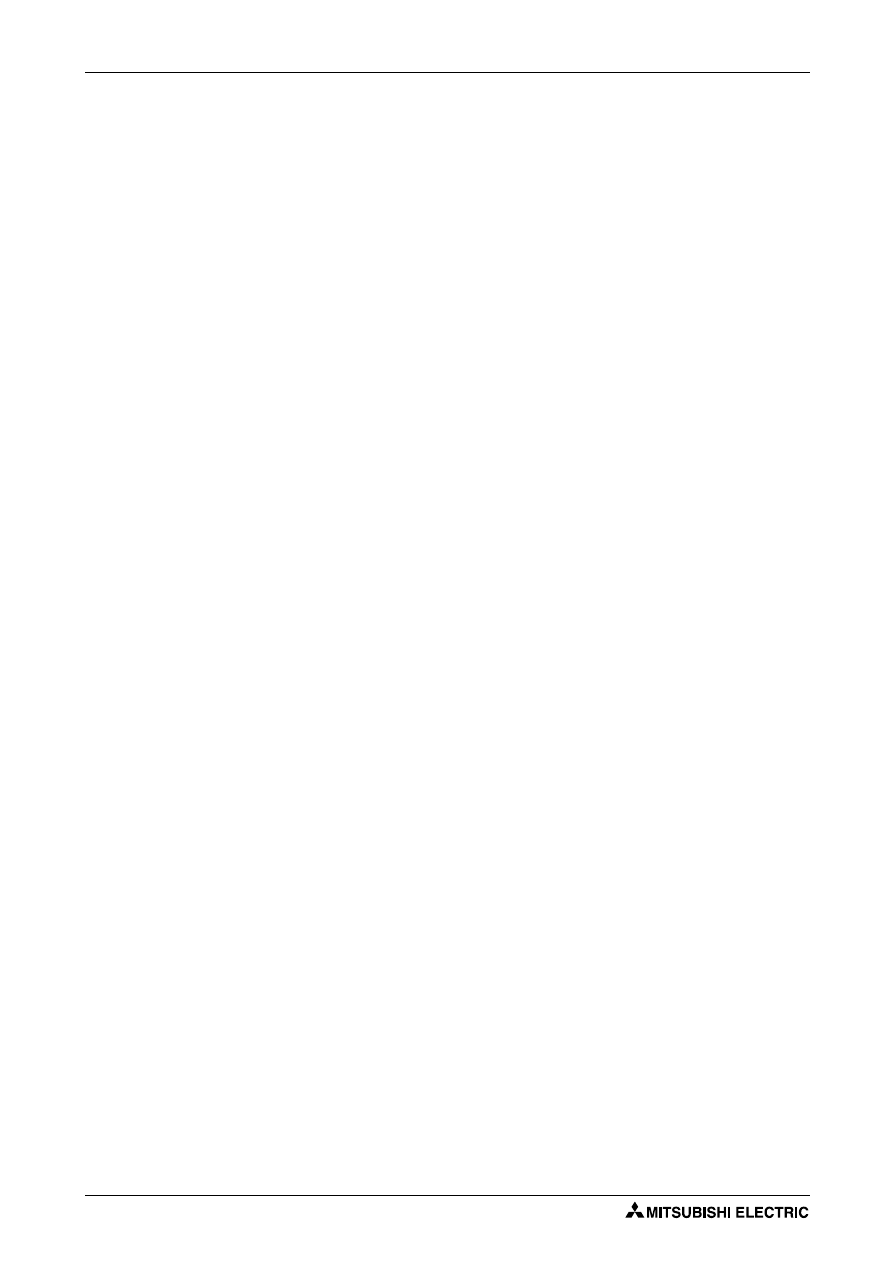
Dane techniczne
Ogólne dane techniczne
11 - 14
NOTATKI:

Wymagania
Zasady kompatybilności elektromagnetycznej
MELSERVO J2-Super
12 - 1
12
Zasady kompatybilności
elektromagnetycznej
12.1 Wymagania
Serwowzmacniacze MELSERVO MR-J2Super odpowiadają wymaganiom norm europejskich
w odniesieniu do kompatybilności elektromagnetycznej. Aby wymagania te były spełnione, ko-
nieczne jest zastosowanie serwowzmacniacza z zalecanym przez producenta filtrem przeciw-
zakłóceniowym oraz wykonanie montażu i instalacji zgodnie z wydanymi przez Mitsubishi Elec-
tric zaleceniach producenta ("EMC Installation Guidelines", dokument nr IB(NA)67310, kod:
103944).
Przy zachowaniu tych warunków zapewnione jest uzyskanie zakłóceń, nie przekraczających
wartości granicznych, określonych w poniżej podanych normach:
●
W stosunku do zakłóceń generowanych przez serwowzmacniacz:
– wartości graniczne zakłóceń rozprzestrzenianych w sieci zasilającej drogą przewodową
- wg EN 55011 klasa A dla długości przewodów silnika do 50m, klasa B dla długości
przewodów silnika do 20m;
– po zabudowaniu w szafie sterującej zgodnie z zaleceniami instalacyjnymi producenta
poza szafą nie występują zakłócenia rozprzestrzeniane drogą bezprzewodową.
●
W stosunku do odporności serwowzmacniacza na zewnętrzne zakłócenia:
– wg EN 50082-2
OGÓLNE ZALECENIA KONSTRUKCYJNE
●
Serwowzmacniacze powinny być zabudowane w szafie sterowniczej. Szafa musi być
odpowiednio uziemiona.
●
Serwowzmacniacz musi być połączony z serwosilnikiem przy użyciu kabla ekranowanego.
Ekran kabla musi być z obu stron połączony z masą urządzeń w sposób odpowiedni dla
sygnałów wysokiej częstotliości. Maksymalna długość przewodów nie może przekraczać
50 m, jeżeli żądane jest zachowanie poziomu zakłóceń wg klasy A i 20m - klasy B.
●
Przewody silnoprądowe powinny być odseparowane od przewodów telefonicznych, sy-
gnałowych, sterujących itp.
●
Uziemienie serwowzmacniacza powinno być w miarę możliwości wykonane oddzielnie.
●
Pomiędzy serwowzmacniaczem i innymi urządzeniami, potencjalnie wrażliwymi na zakłóce-
nia, należy zachować odległość nie mniejszą niż 10 cm.
UWAGI
Sposób montażu i podłączania filtrów przeciwzakłóceniowych przedstawiony jest w doku-
mentacji technicznej filtrów.
Z powodu różnorodności możliwych rozwiązań nie jest możliwe opisanie wszystkich przypad-
ków. Dlatego też możliwe jest, że w praktyce uzyskane będą wyniki odmienne od opisanych
w podręczniku.

Zasady kompatybilności elektromagnetycznej
Wymagania
12 - 2
NOTATKI:
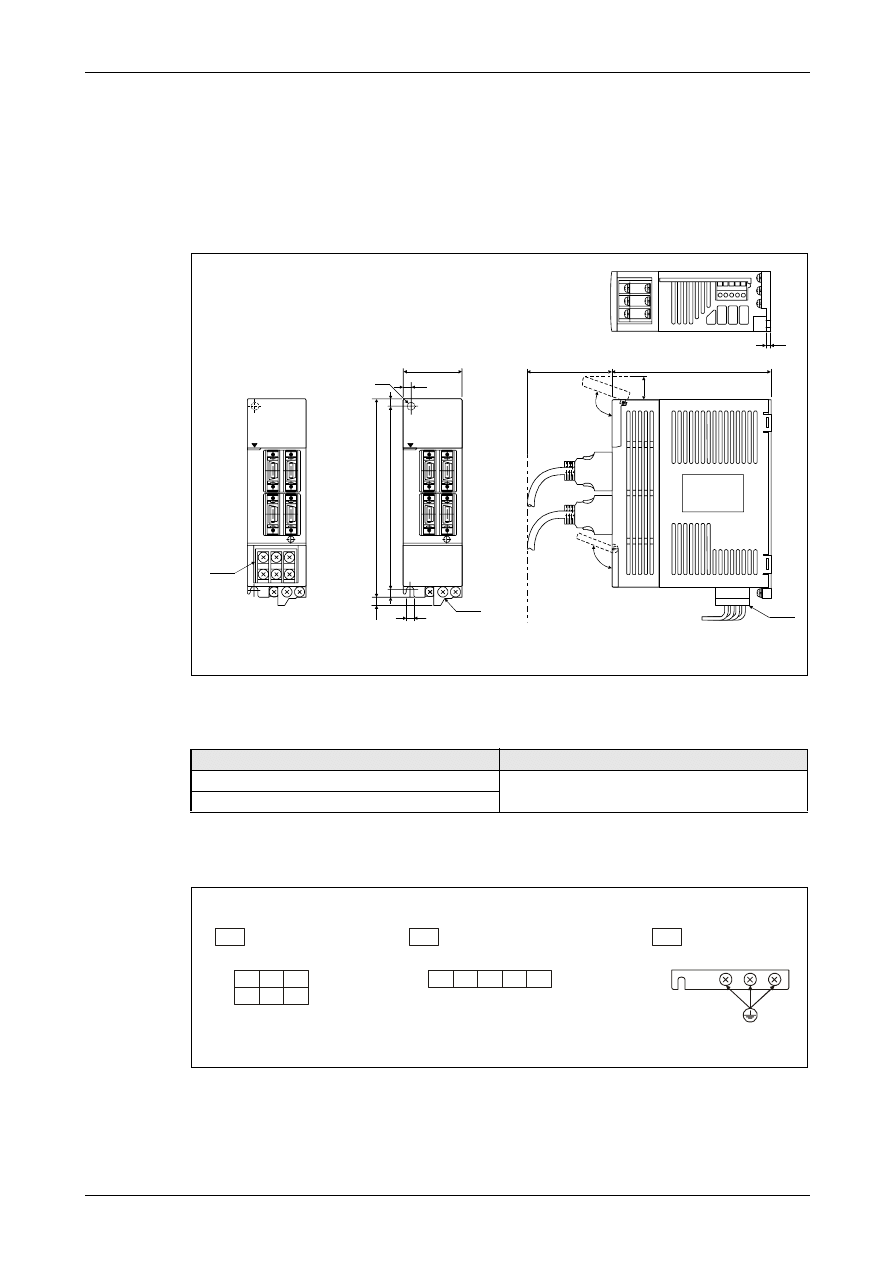
Serwowzmacniacze
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 1
13
Wymiary i masa
13.1 Serwowzmacniacze
MR-J2S-10A i MR-J2S-20A
S00664aC
Rys. 13-1: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-10A
0,7
MR-J2S-20A
Tab. 13-1: Masa
S000665C
Rys. 13-2: Zaciski
70
135
20
TE2
4
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
TE1
MITSUBISHI
OPEN
50
6
L1
U
L2
V
L3
W
6
ř 6
16
8
15
6
7
6
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
PE
MITSUBISHI
OPEN
6
Jedn.: mm
L1
U
TE1
L2
V
L3
W
D
TE2
C
P L21 L11
PE
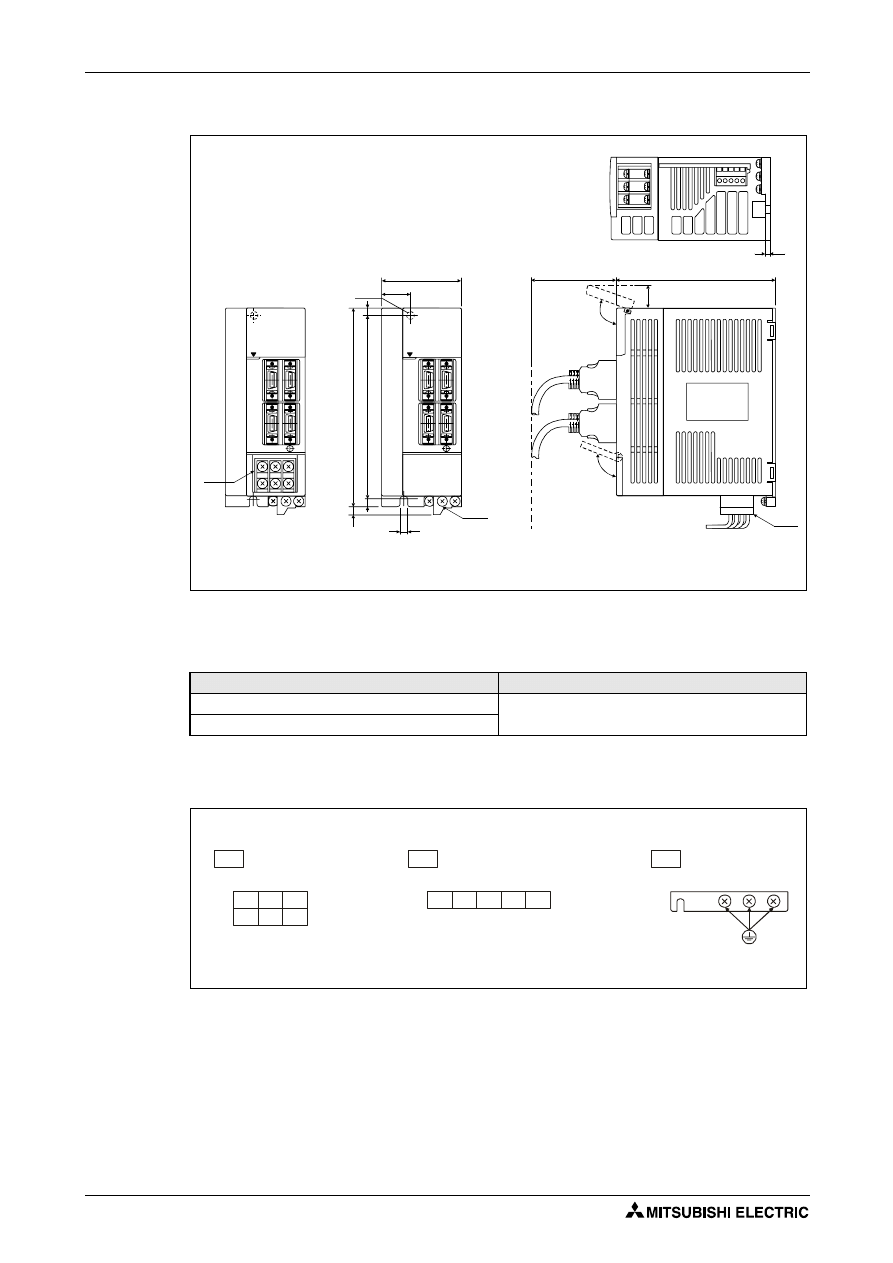
Wymiary i masa
Serwowzmacniacze
13 - 2
MR-J2S-40A i MR-J2S-60
S000939C
Rys. 13-3: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-40A
1,1
MR-J2S-60A
Tab. 13-2: Masa
S000665C
Rys. 13-4: Zaciski
TE1
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
70
135
20
TE2
4
PE
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
70
22
ř 6
16
8
15
6
6
6
7
L1
U
L2
V
L3
W
6
Jedn.: mm
L1
U
TE1
L2
V
L3
W
D
TE2
C
P L21 L11
PE
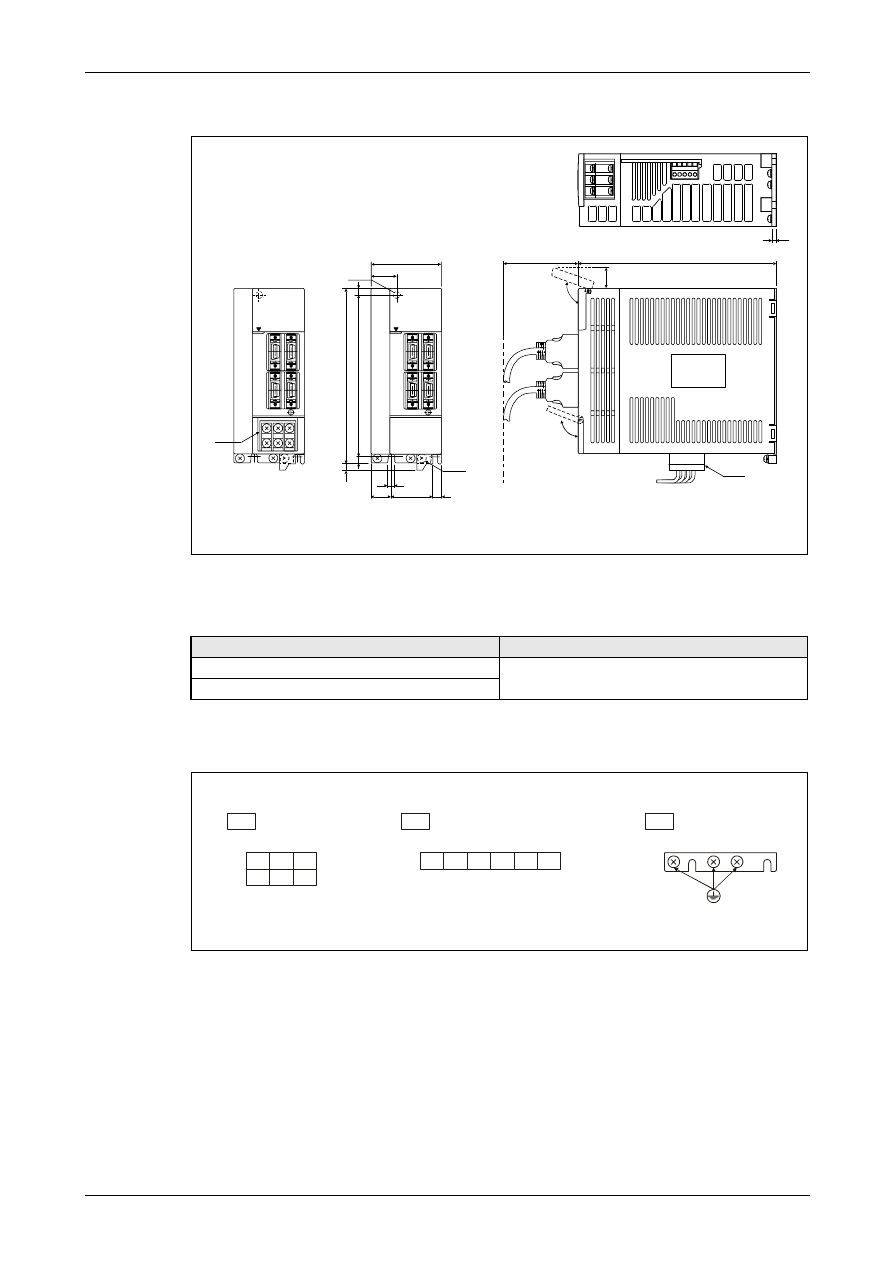
Serwowzmacniacze
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 3
MR-J2S-70A i MR-J2S-100
S000666C
Rys. 13-5: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-70A
1,7
MR-J2S-100A
Tab. 13-3: Masa
S000667C
Rys. 13-6: Zaciski
TE1
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
6
PE
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
MITSUBISHI
OPEN
70
22
ř 6
6
168
156
6
6
22
42
6
7
L1
U
L2
V
L3
W
TE2
70
20
190
Jedn.: mm
L1
U
TE1
L2
V
L3
W
D
TE2
C
P L21 L11 N
PE
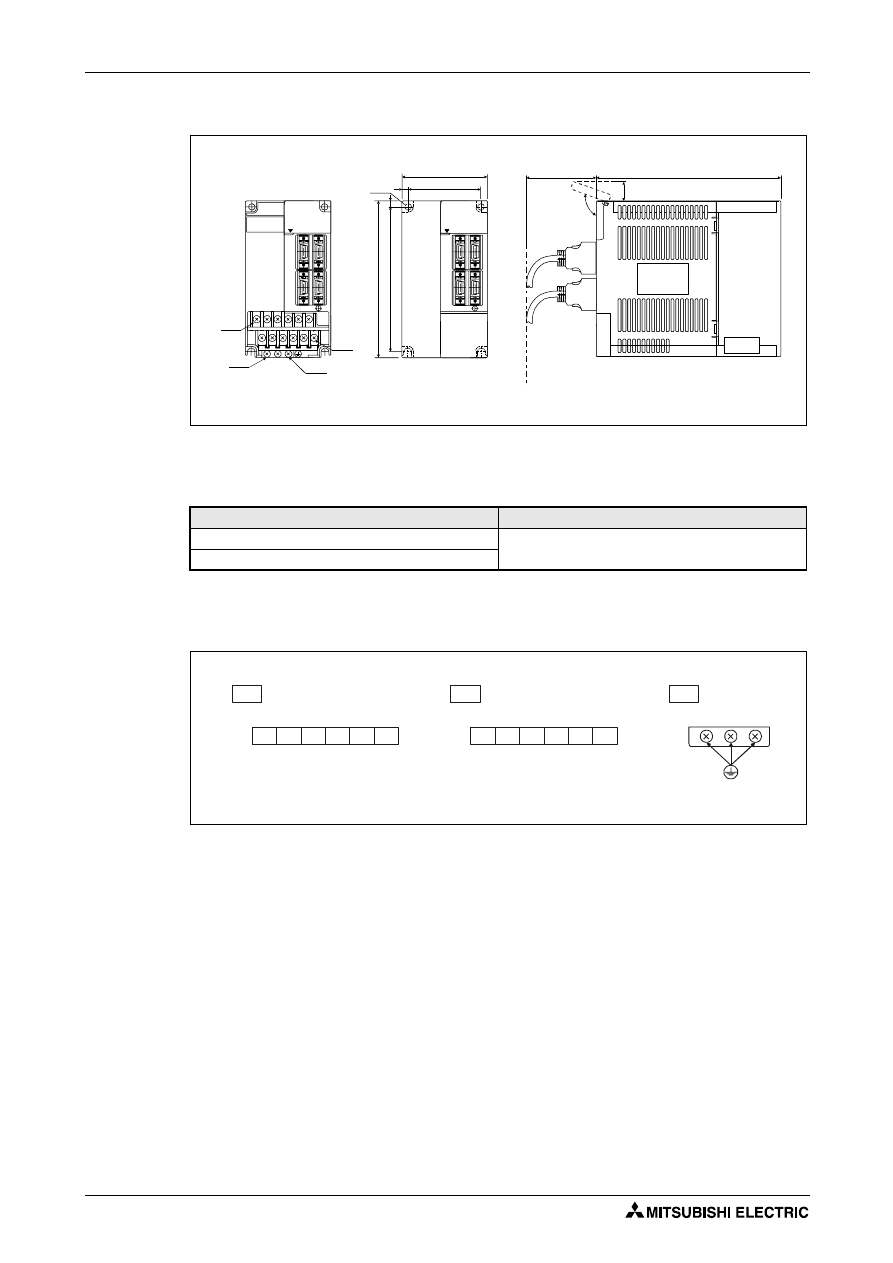
Wymiary i masa
Serwowzmacniacze
13 - 4
MR-J2S-200A i MR-J2S-350A
S000668C
Rys. 13-7: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-200A
2,0
MR-J2S-350A
Tab. 13-4: Masa
S000669C
Rys. 13-8: Zaciski
70
195
20
6
90
16
8
15
6
6
78
6
OPEN
MITSUBISHI
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
OPEN
MITSUBISHI
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
TE2
TE1
3–M4
PE
Jedn.: mm
L1
TE1
L2 L3 U
V W
L11
TE2
L21 D
P
C
N
PE
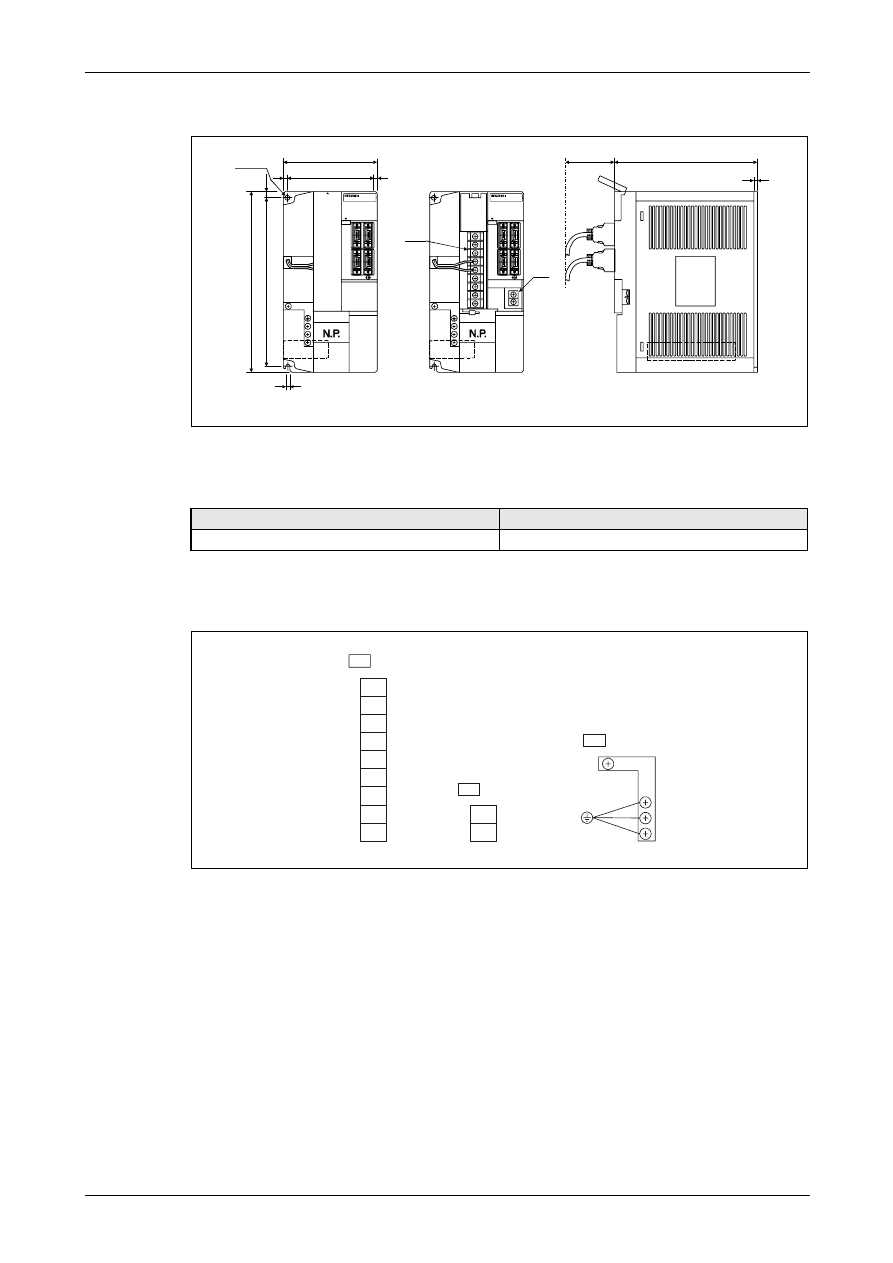
Serwowzmacniacze
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 5
MR-J2S-500A
S001159C
Rys. 13-9: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-500A
4,9
Tab. 13-5: Masa
S000951C
Rys. 13-10: Zaciski
130
25
0
23
5
7,
5
118
6
6
6
2 x ř 6
OPEN
OPEN
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
TE1
TE1
OPEN
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
()
200
5
(70)
Jedn.: mm
L
1
L
2
L
1
L
2
L
3
C
P
N
U
V
W
TE1
TE2
PE
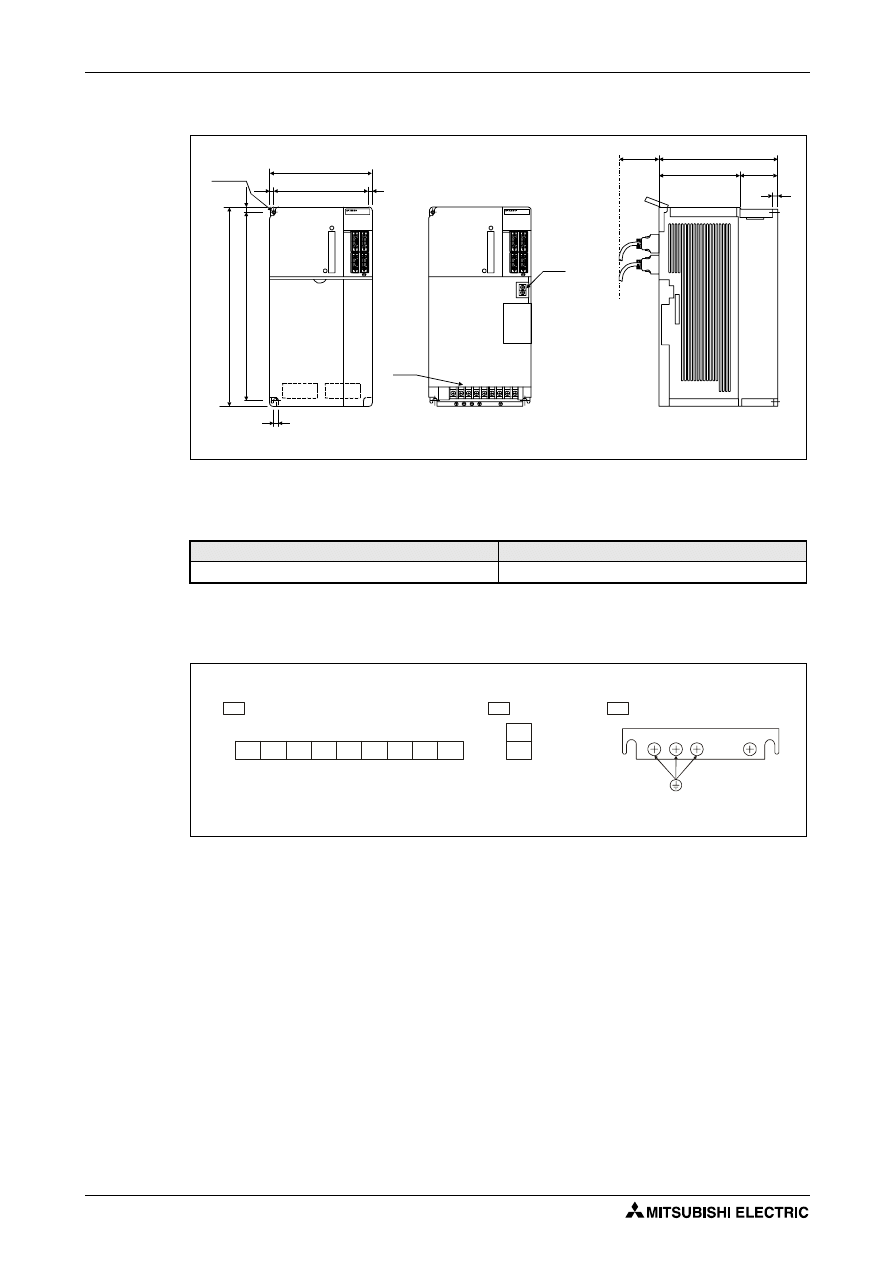
Wymiary i masa
Serwowzmacniacze
13 - 6
MR-J2S-700A
S001160C
Rys. 13-11: Wymiary gabarytowe
Model
Masa [kg]
MR-J2S-700A
7,2
Tab. 13-6: Masa
S000952C
Rys. 13-12: Zaciski
62
138
200
6
(70)
180
35
0
335
7,
5
160
10
10
6
2 x ř 6
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
TE1
TE2
C
N
1
A
C
N
2
E
N
C
C
N
3
C
N
1
B
(
)
Jedn.: mm
L
1
L
2
L
3
C
P
N
U
V
W
L
1
L
2
TE1
TE2
PE
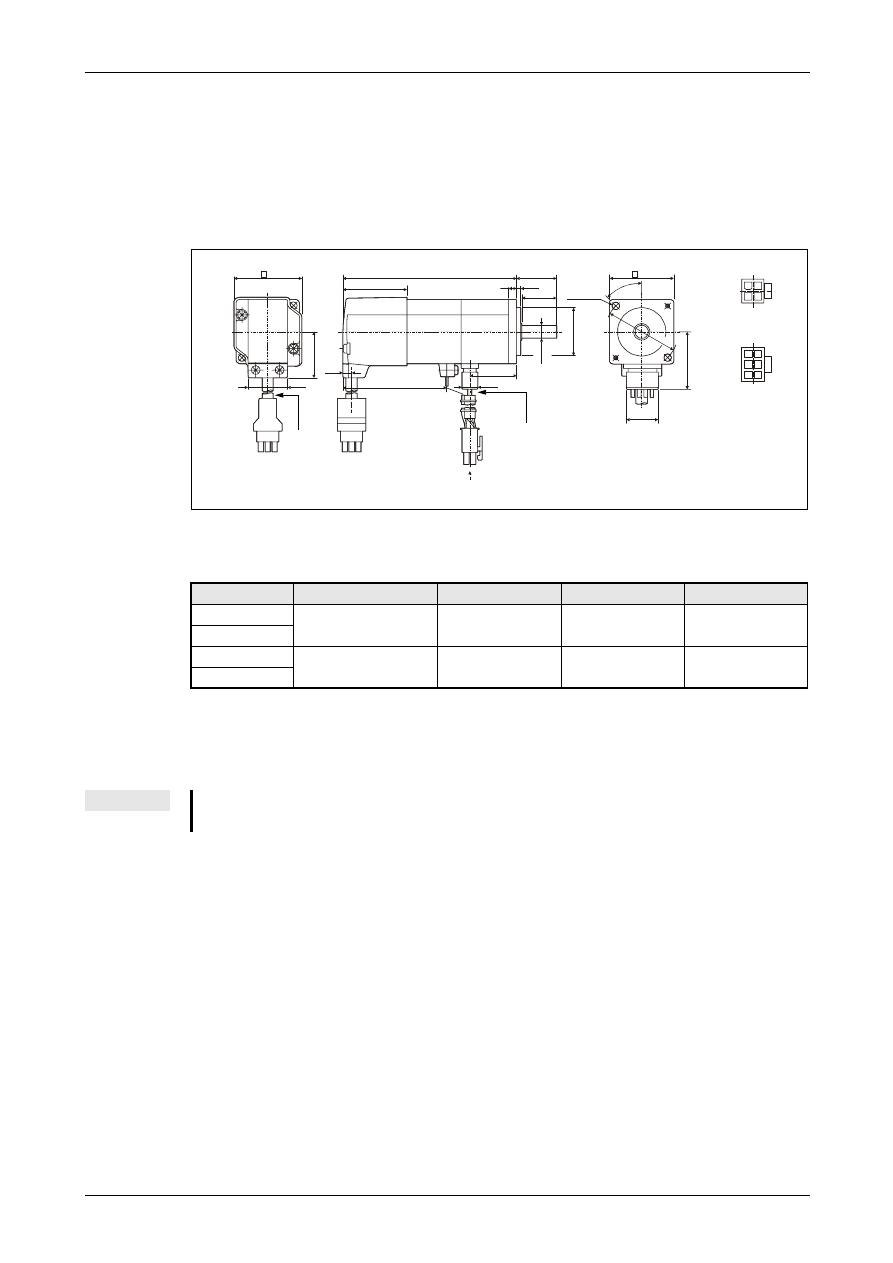
Serwosilniki
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 7
13.2 Serwosilniki
13.2.1
Seria HC-MFS i HC-KFS
HC-MFS053 (B) i HC-MFS13 (B),
HC-KFS053 (B) i HC-KFS13 (B)
S000944C
Rys. 13-13: Wymiary
Model
Moc wyjściowa [W]
L [mm]
KL [mm]
Masa [kg]
HC-MFS053 (B)
50
81,5 (109,5)
29,5
0,4 (0,75)
HC-KFS053 (B)
HC-MFS13 (B)
100
96,5 (124,5)
44,5
0,53 (0,89)
HC-KFS13 (B)
Tab. 13-7: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
42
40
25,2
6,8
L
40,5
65,5
9,9
KL
A
A
A
25
20
5
2,5
2 x ř 4,5
45°
21,5
ř
3
0h7
35
,7
ř
8h6
28
,7
ř 46
1
3
4
2
1
4
5
6
2
3
Jedn.: mm
Wypr. enko-
dera (0,3m)
Wyprowadzenie zasilania (0,3 m)
czerwony: faza U
biały: faza V
czarny: faza W
zielono/żółty: uziemienie
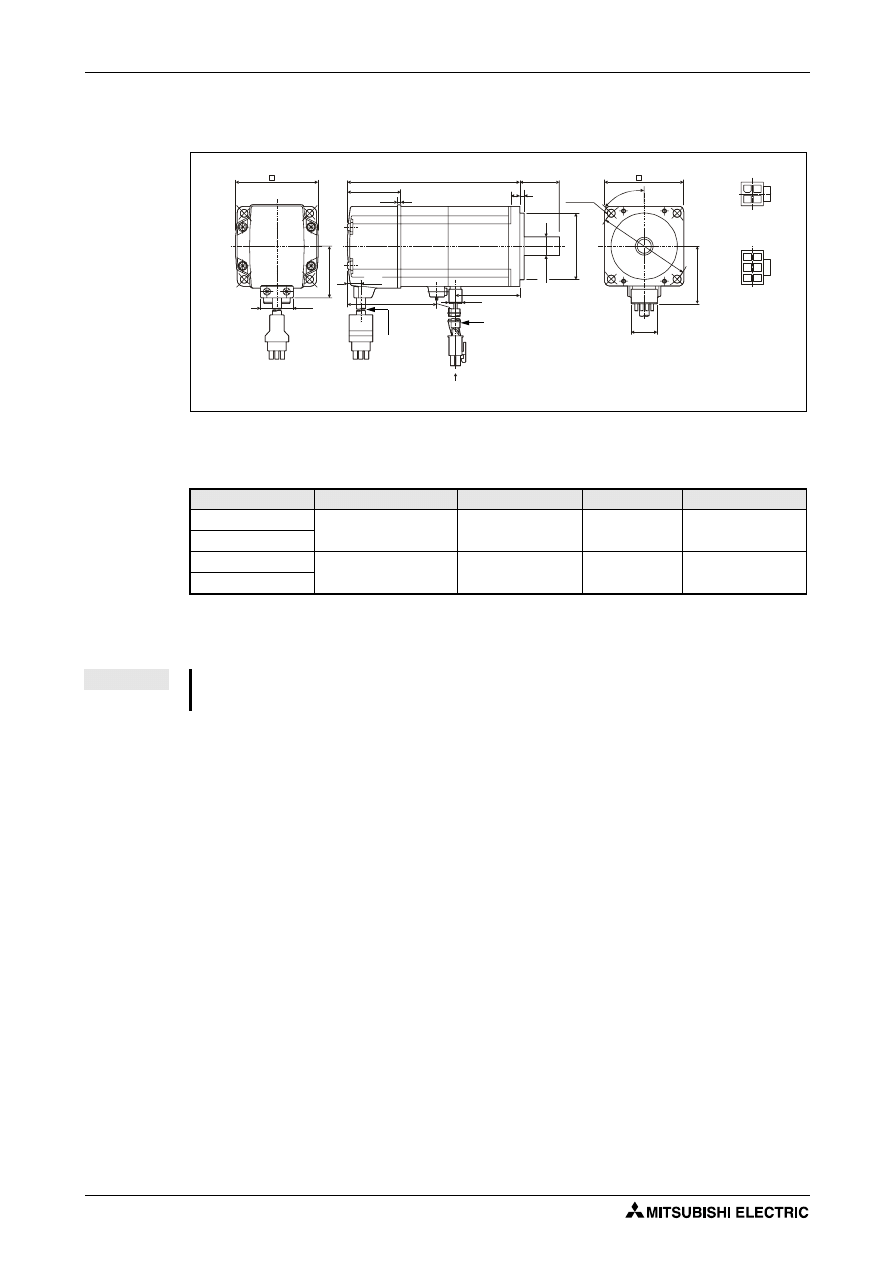
Wymiary i masa
Serwosilniki
13 - 8
HC-MFS23 (B) i HC-MFS43 (B),
HC-KFS23 (B) i HC-KFS43 (B)
S000945C
Rys. 13-14: Wymiary
Model
Moc wyjściowa [W]
L [mm]
KL [mm]
Masa [kg]
HC-MFS23 (B)
200
99,5 (131,5)
49,1
0,99 (1,6)
HC-KFS23 (B)
HC-MFS43 (B)
400
124,5 (156,5)
72,1
1,45 (2,1)
HC-KFS43 (B)
Tab. 13-8: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
4 x ř 5,8
20
42
,8
45°
30
3
7
L
ř
50h
7
25,2
38
,4
41
2,7
ř
14h6
KL
68
10,6
9,9
ř 70
A
62
60
A
A
1
3
4
2
1
4
5
6
2
3
Jedn.: mm
Wypr. enko-
dera (0,3 m)
Wyprowadzenie zasilania (0,3 m)
czerwony: faza U
biały: faza V
czarny: faza W
zielono/żółty: uziemienie
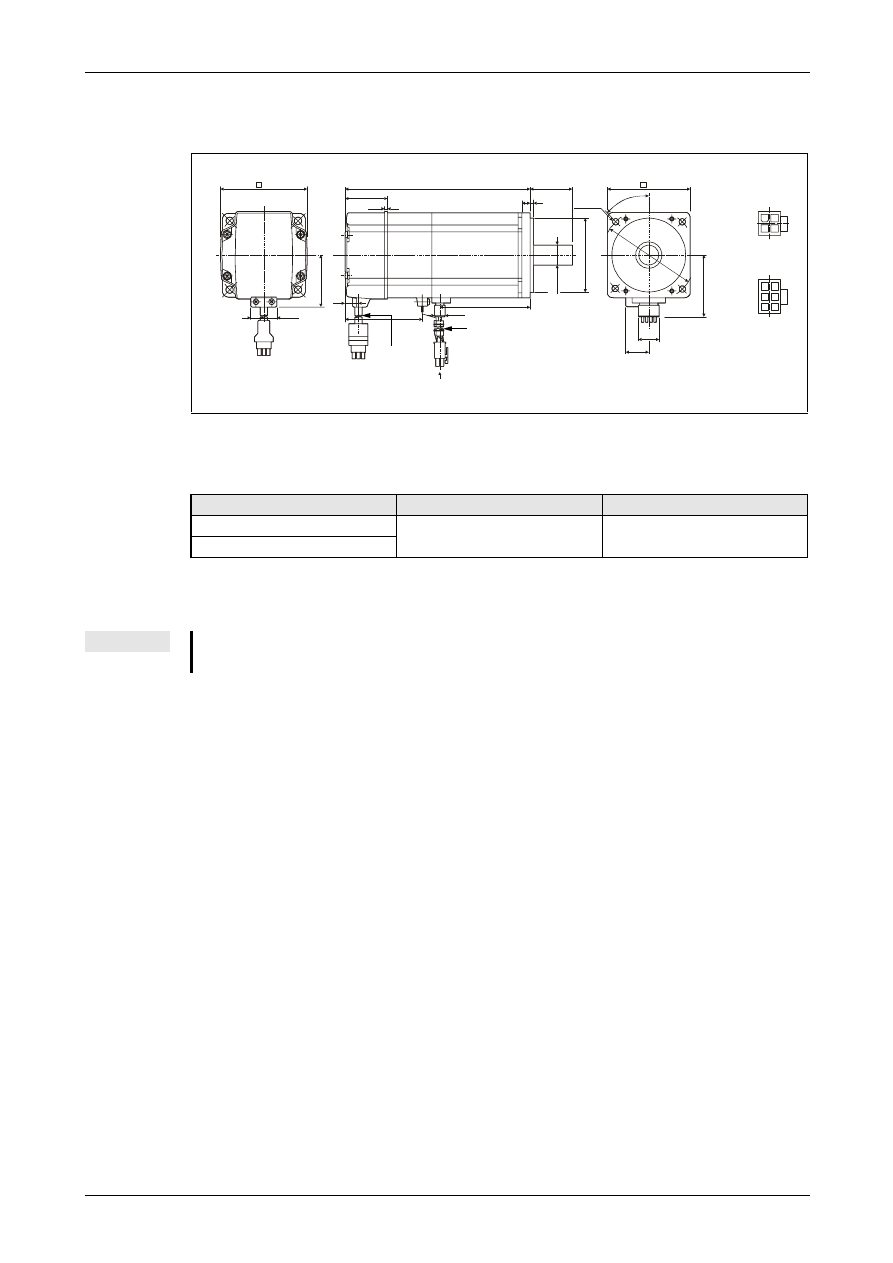
Serwosilniki
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 9
HC-MFS73 (B),
HC-KFS73 (B)
S000946C
Rys. 13-15: Wymiary
Model
Moc wyjściowa [W]
Masa [kg]
HC-MFS73 (B)
750
3,0 (4,0)
HC-KFS73 (B)
Tab. 13-9: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
82
80
4 x ř 6,6
20
19,5
58,
1
45°
40
3
8
142 (177,5)
ř
70
h7
25,2
48
,7
39
2,7
ř
19h
6
86,7
72
11
9,9
ř 90
A
A
A
1
3
4
2
1
4
5
6
2
3
Jedn.: mm
Wypr.enko
-dera 0,3 m
Wyprowadzenie zasilania (0,3 m)
czerwony: faza U
biały: faza V
czarny: faza W
zielono/żółty: uziemienie
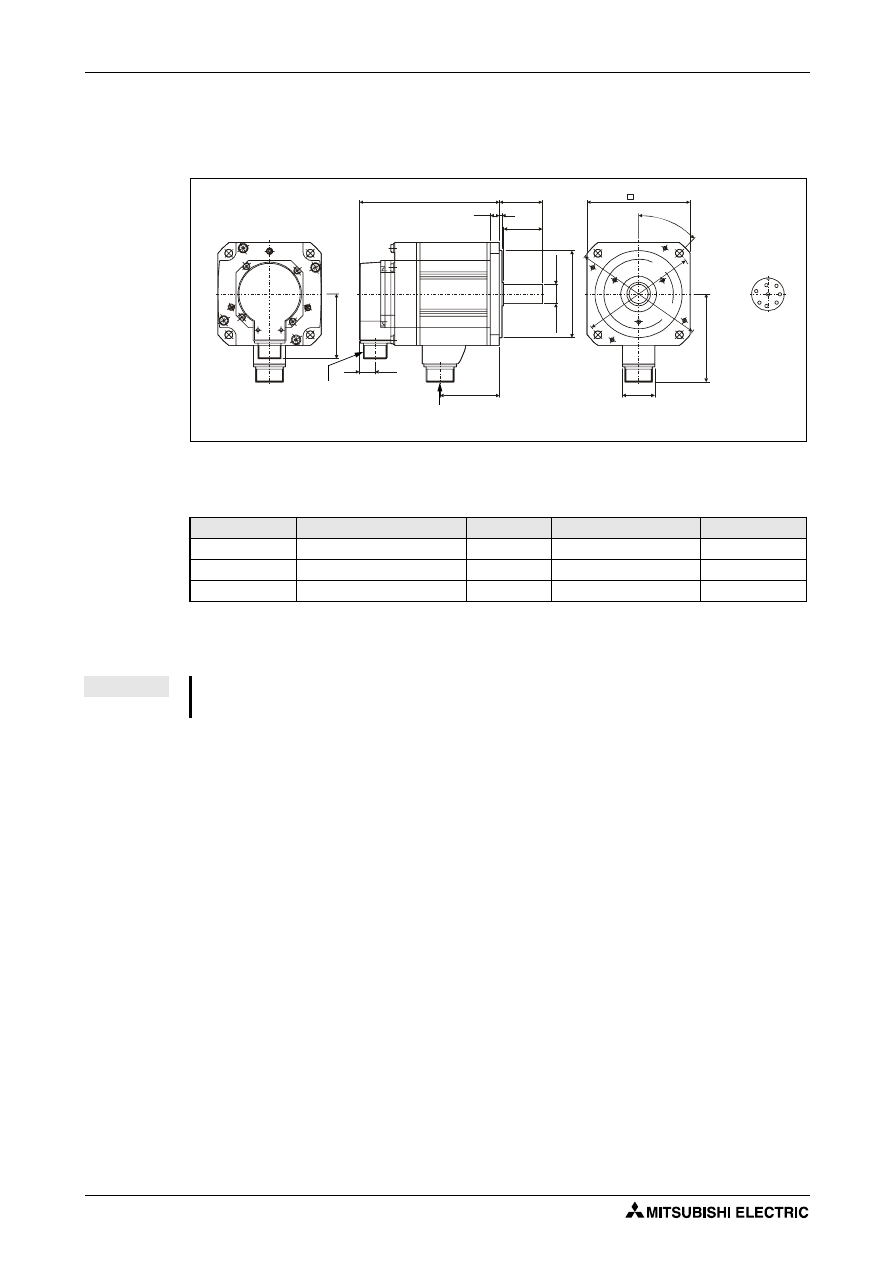
Wymiary i masa
Serwosilniki
13 - 10
13.2.2 Seria
HC-SFS
HC-SFS52 (B) do HC-SFS152 (B)
S000947C
Rys. 13-16: Wymiary
Model
Moc wyjściowa [kW]
L [mm]
KL [mm]
Masa [kg]
HC-SFS52 (B)
0,5
120 (153)
51,5
5,0
HC-SFS102 (B)
1,0
145 (178)
76,5
7,0
HC-SFS152 (B)
1,5
170 (203)
101,5
9,0
Tab. 13-10: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
81
,5
ř
24h
6
ř
11
0h
7
11
1
19,5
L
55
45°
12
3
KL
41
130
G
F
E H
D
C
B
A
ř 1
45
ř 16
5
Jedn.: mm
Rozkład styków w
gnieździe zasilania
Gniazdo enkodera
Gniazdo zasilania
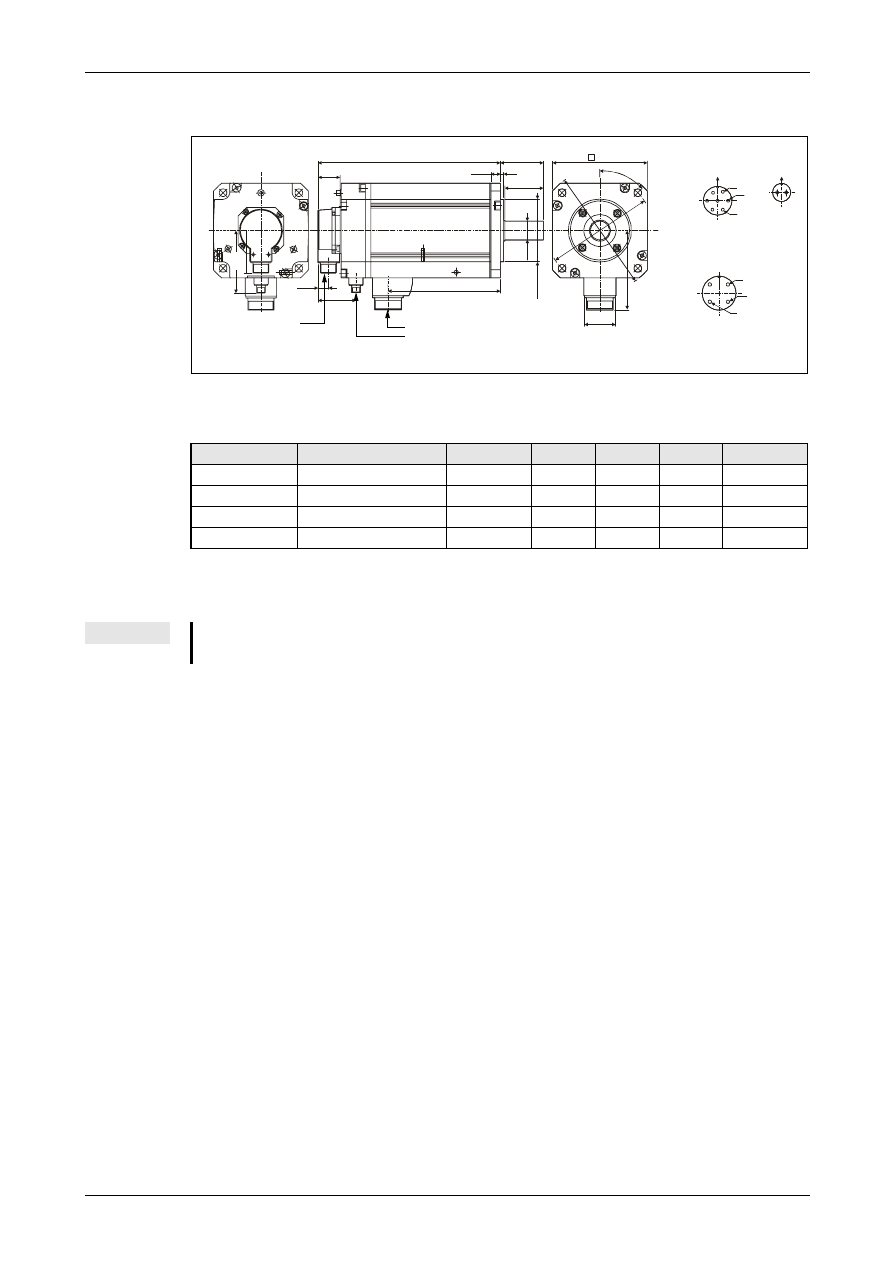
Serwosilniki
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 11
HC-SFS202 (B) do HC-SFS702 (B)
S000948C
Rys. 13-17: Wymiary
Model
Moc wyjściowa [kW]
L [mm]
KL [mm]
KA [mm]
KB [mm]
Masa [kg]
HC-SFS202 (B)
2,0
145 (193)
68,5
142
46
12 (18)
HC-SFS352 (B)
3,5
187 (235)
110,5
142
46
19 (25)
HC-SFS502 (B)
5,0
208 (256)
131,5
142
46
23 (29)
HC-SFS702 (B)
7,0
292 (340)
210,5
150
58
32 (38)
Tab. 13-11: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
D A
C B
#1
#2
39,5
19.5
69
KL
L
79
75
ř
35
ř
114,
3
18
3
45°
KB
KA
B
W
V
U
ř2
30
ř 2
00
11
7
176
G
F
E D
C
A
A B
W
V
U
Jedn.: mm
Gniazdo enkodera
Gniazdo zasilania
Gniazdo luzownika
Rozkład styków w
gnieździe luzownika
Rozkład styków w
gnieździe zasilania
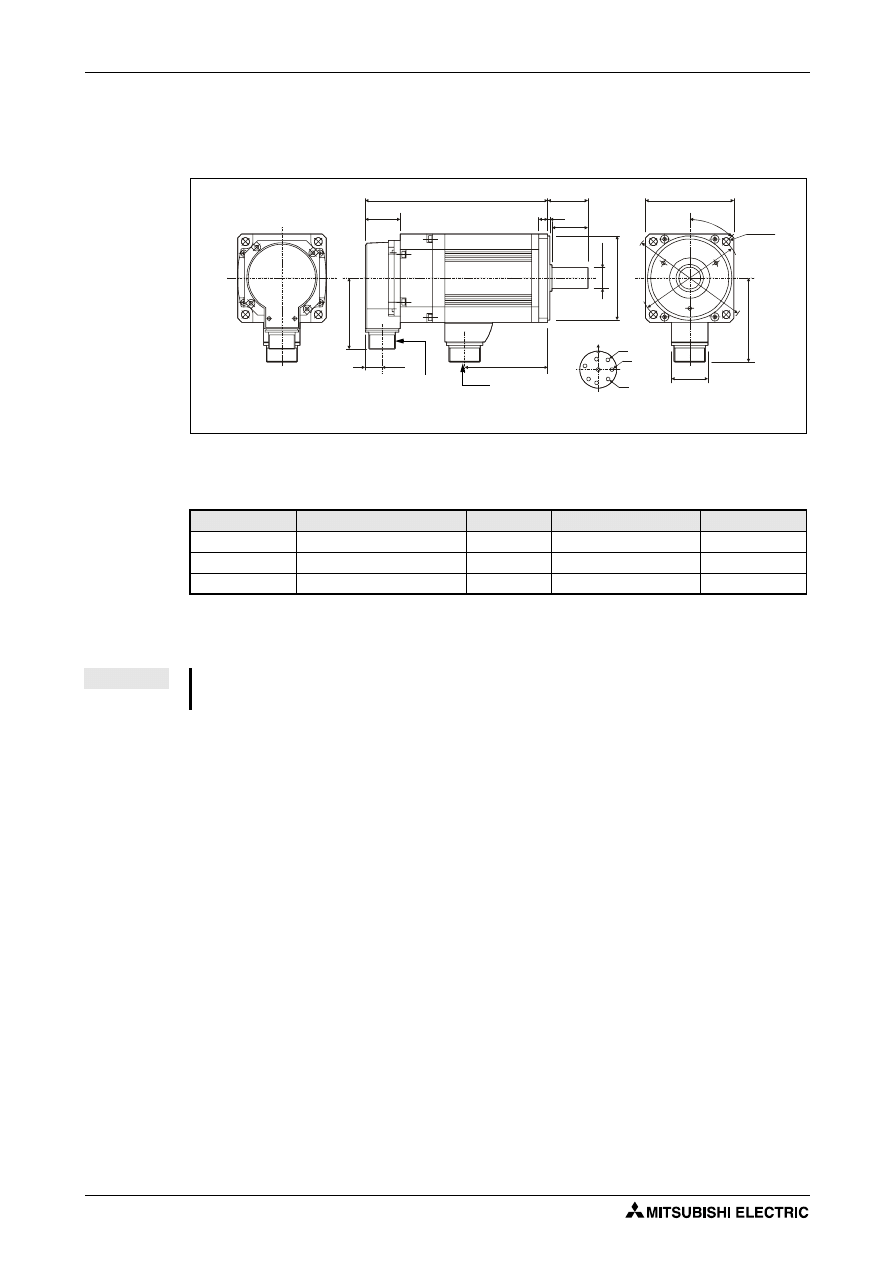
Wymiary i masa
Serwosilniki
13 - 12
13.2.3 Seria
HC-RFS
HC-RFS103 (B), HC-RFS153 (B) i HC-RFS203 (B)
S000949C
Rys. 13-18: Wymiary
Model
Moc wyjściowa [kW]
L [mm]
KL [mm]
Masa [kg]
HC-RFS103 (B)
1,0
147 (185)
71
3,9 (6,0)
HC-RFS153 (B)
1,5
172 (210)
96
5,0 (7,0)
HC-RFS203 (B)
2,0
197 (235)
121
6,2 (8,3)
Tab. 13-12: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
19,5
81
,5
39,5
L
45
10 3
40
KL
ř
2
4h6
ř
95h7
U
G
A
B
C
H
D
E
F
V
W
41
96
ř 13
5
ř 1
15
100
45°
4 x ř 9
Jedn.: mm
Rozkład styków w
gnieździe zasilania
Gniazdo
enkodera
Gniazdo
zasilania
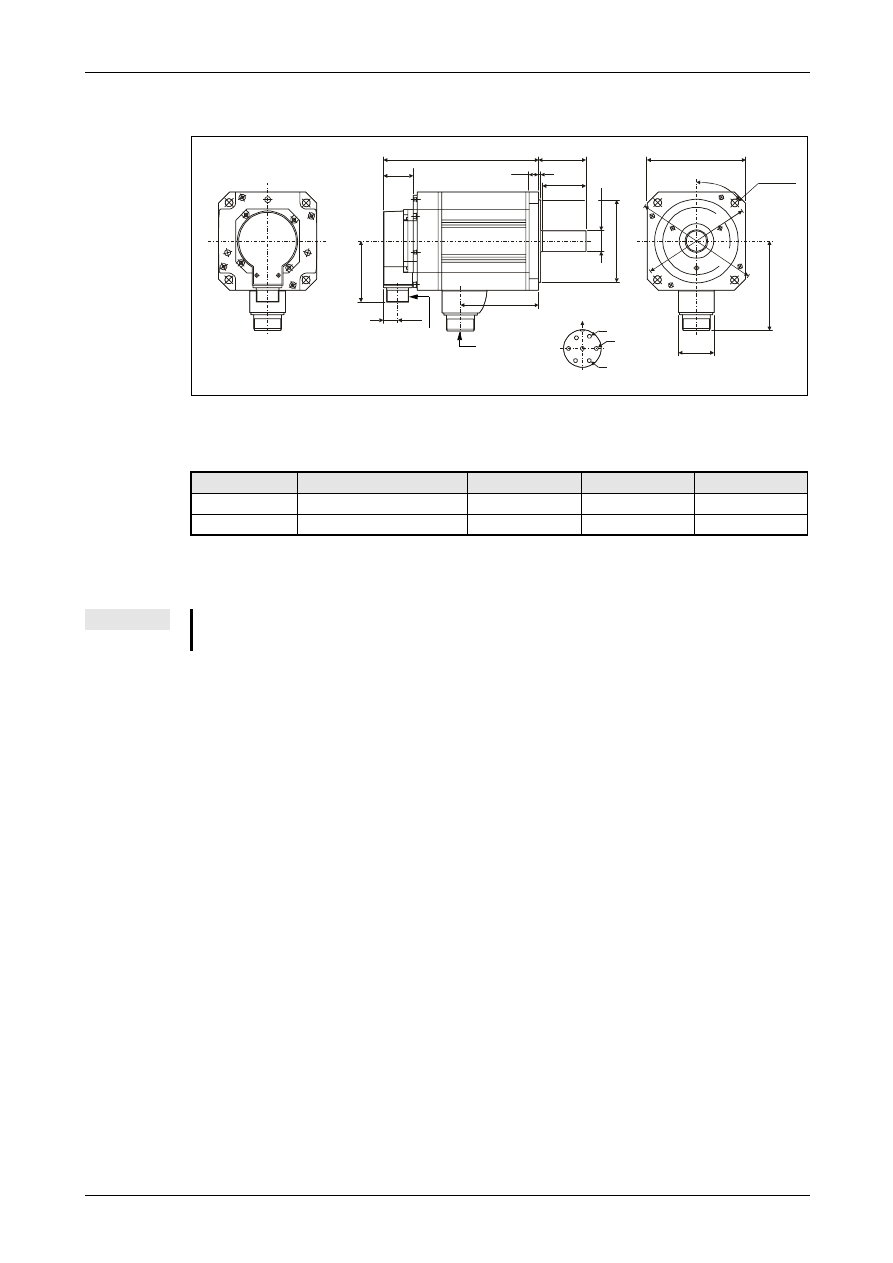
Serwosilniki
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 13
HC-RFS353 (B) i HC-RFS503 (B)
S000950C
Rys. 13-19: Wymiary
Model
Moc wyjściowa [kW]
L [mm]
KL [mm]
Masa [kg]
HC-RFS353 (B)
3,5
217 (254)
148
12 (15)
HC-RFS503 (B)
5,0
274 (311)
205
17 (21)
Tab. 13-13: Dane techniczne
UWAGA
Wartości podane w nawiasach dotyczą serwosilników w wersji z luzownikiem elektromagne-
tycznym
39,5
19,5
81
,5
12
3
L
63
46
12
0
58
KL
ř
28
h6
ř
110h7
U
G A
B
C
D
E
F
V
W
ř 1
45
ř 16
5
130
45°
4 x ř 9
Jedn.: mm
Rozkład styków w
gnieździe zasilania
Gniazdo enkodera
Gniazdo
zasilania
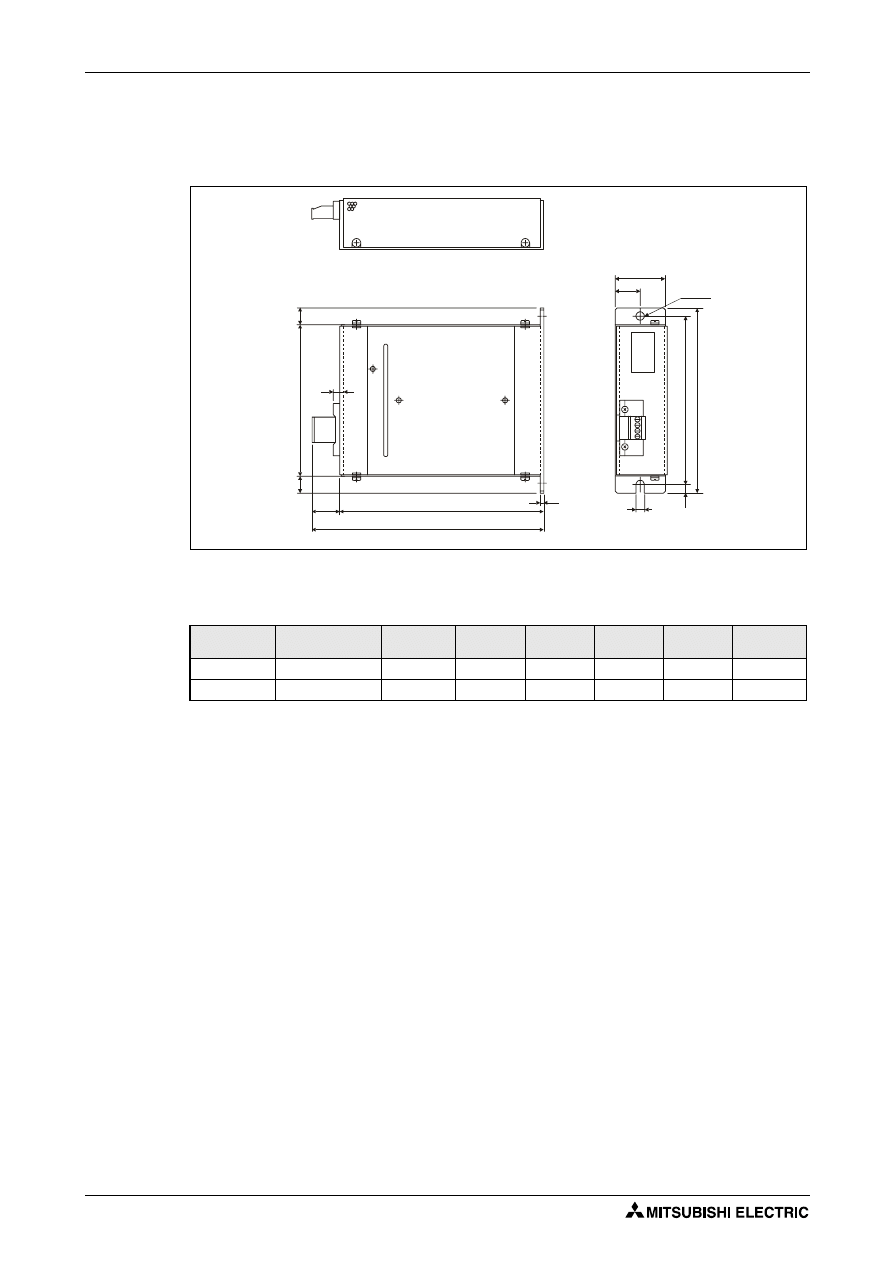
Wymiary i masa
Oporniki hamujące (opcja)
13 - 14
13.3 Oporniki
hamujące (opcja)
MR-RB032 i MR-RB12
S000690C
Rys. 13-20: Wymiary
Typ
Moc hamowania
[W]
Oporność
[W]
LA [mm]
LB [mm]
LC [mm]
LD [mm]
Masa [kg]
MR-RB032
30
40
30
15
119
99
0,5
MR-RB12
100
40
40
15
169
149
1,1
Tab. 13-14: Dane techniczne
MR-RB
15
6
6
168
LB
6
LA
ř 6 mm
G3
G4
TE1
P
C
14
4
1
2
12
LC
LD
20
1,6
5
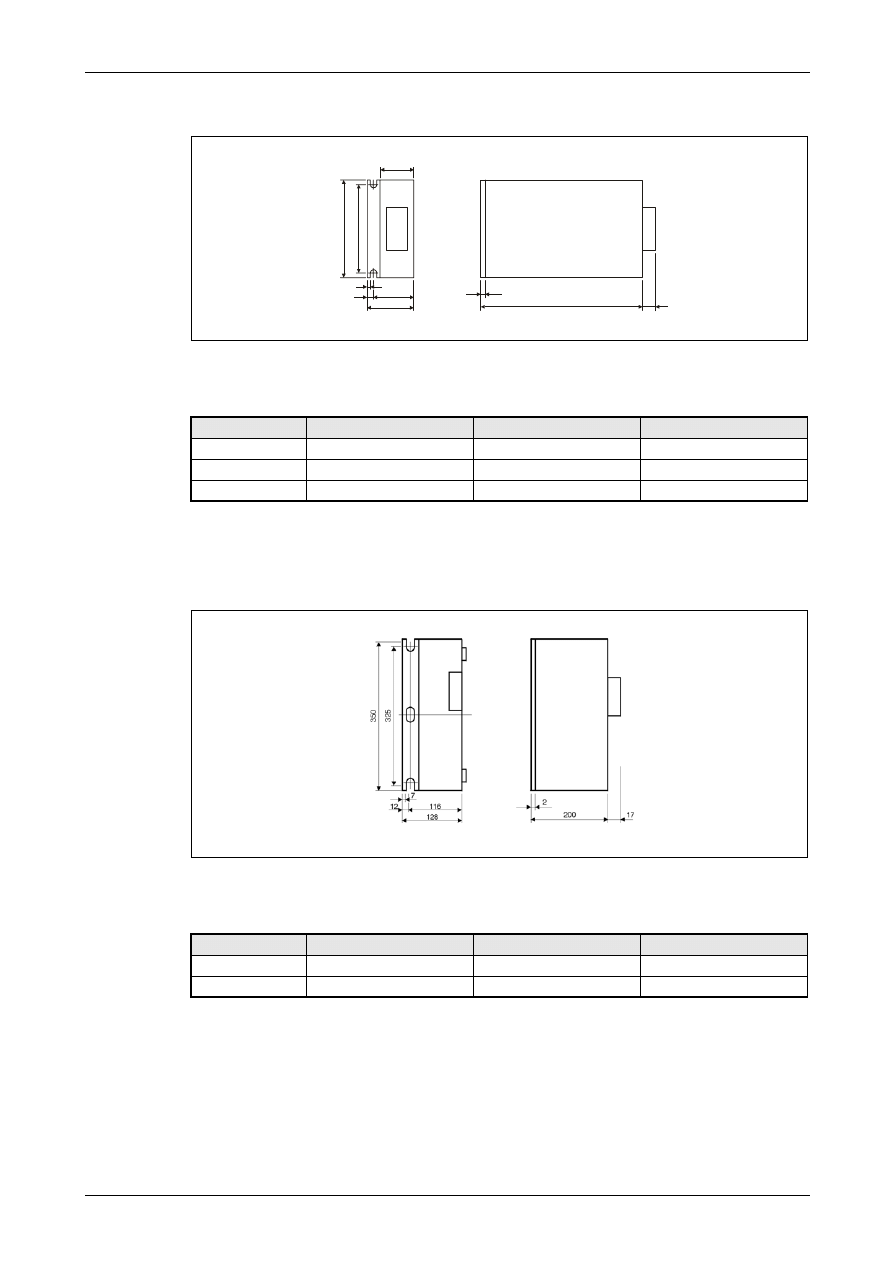
Oporniki hamujące (opcja)
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 15
MR-RB32, MR-RB31 i MR-RB30
MR-RB50 i MR-RB51
S000691C
Rys. 13-21: Wymiary
Typ
Moc hamowania [W]
Oporność [W]
Masa [kg]
MR-RB32
300
40
2,9
MR-RB30
300
13
2,9
MR-RB31
300
6,7
2,9
Tab. 13-15: Dane techniczne
S000692T
Rys. 13-22: Wymiary
Typ
Moc hamowania [W]
Oporność [W]
Masa [kg]
MR-RB50
500
13
5,6
MR-RB51
500
6,7
5,6
Tab. 13-16: Dane techniczne
3,2
318
100
79
90
7
10
12
5
1
50
17
Jedn.: mm
Jedn.: mm
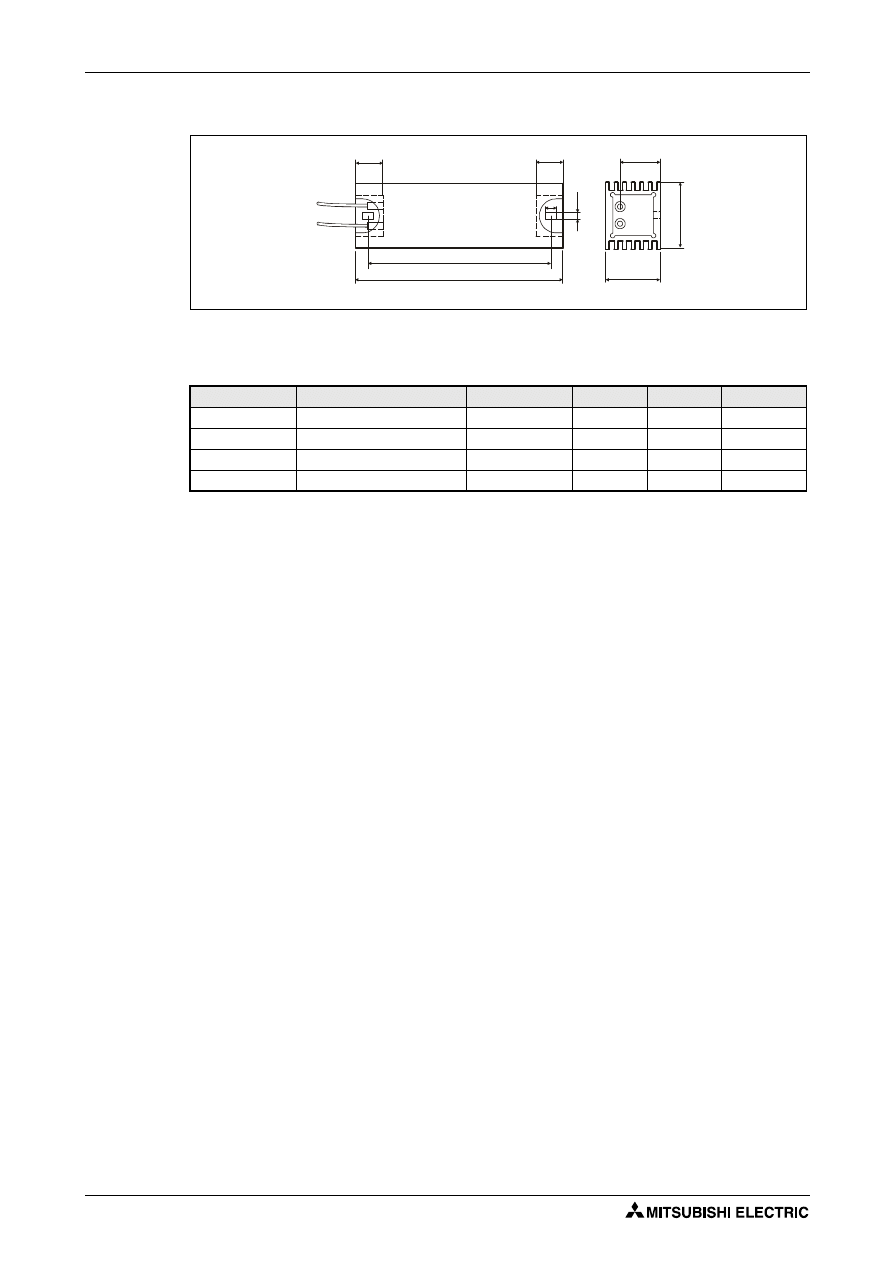
Wymiary i masa
Oporniki hamujące (opcja)
13 - 16
RFH75 do RFH400
S000954C
Rys. 13-23: Wymiary
Typ
Moc hamowania [W]
Oporność [W]
L [mm]
I [mm]
Masa [kg]
MR-RFH75-40
150
40
90
79
0,16
MR-RFH220-40
400
40
200
189
0,42
MR-RFH400-13
600
13
320
309
0,73
MR-RFH400-6,7
600
6,7
320
309
0,73
Tab. 13-17: Dane techniczne
20
27
L
I
12
12
7
4,
6
36
Jedn.: mm
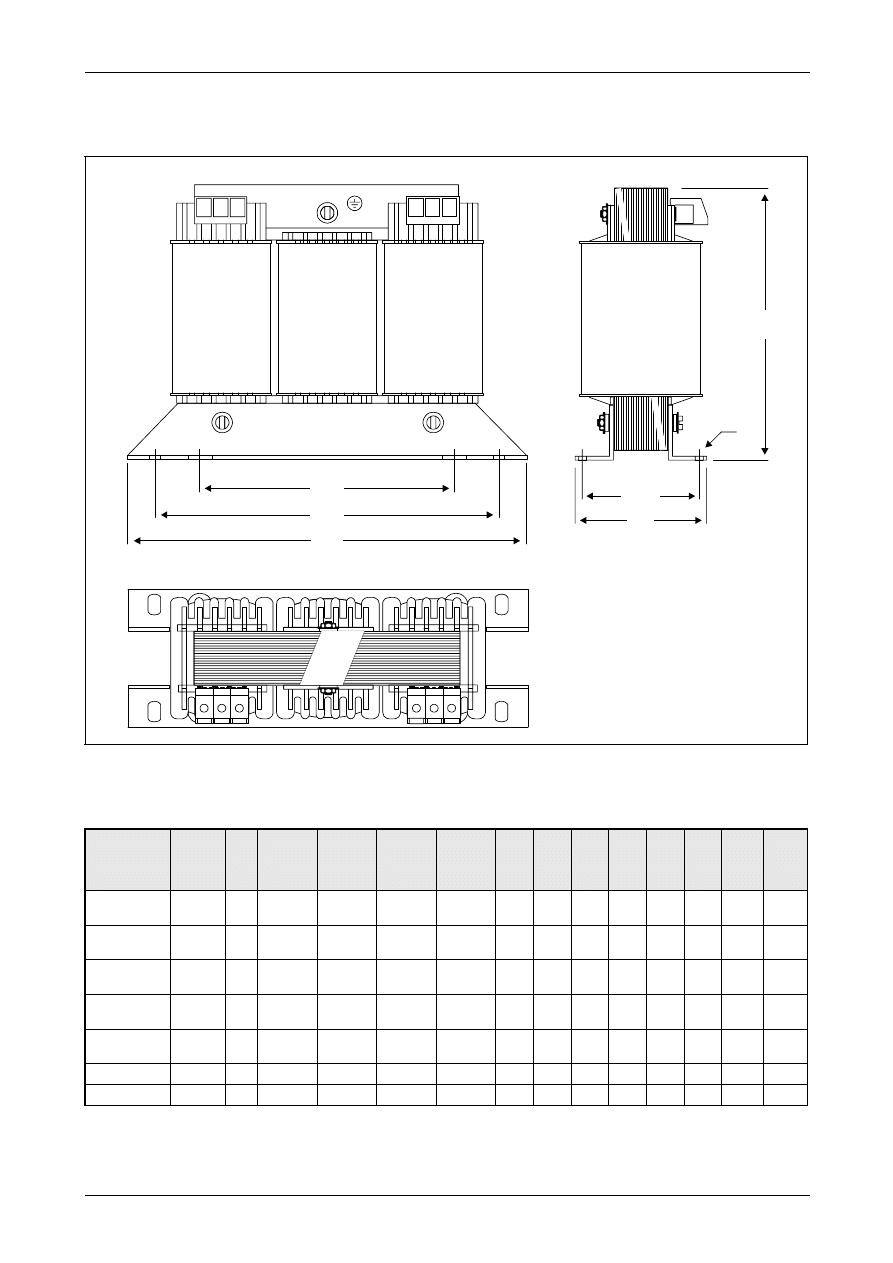
Autotransformatory
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 17
13.4 Autotransformatory
S000693C
Abb. 13-24: Wymiary
Model
Moc
[kVA]
ED
[%]
Prąd
wejścio-
wy
[A]
Prąd
wyjścio-
wy
[A]
Przekrój
[mm
2
]
Moc strat
[W]
B
[mm]
T
[mm]
H
[mm]
L1
[mm]
L2
[mm]
L3
[mm]
d
[mm˛]
Masa
[kg]
MT 01364023/
MT 1,3-60
1,3
60
2,02
2,69
3,26
4,27
2,5
2,5
103
167
219
105
163
136
201
71
7 x 12
7,0
MT 01764023/
MT 1,7-60
1,7
60
2,61
3,89
4,27
6,28
2,5
2,5
110
199
219
125
163
136
201
91
7 x 12
10,7
MT 02564023/
MT 2,5-60
2,5
60
3,80
5,42
6,28
8,78
2,5
2,5
155
282
267
115
202
176
249
80
7 x 12
16,5
MT 03564023/
MT 3,5-60
5,5
60
5,30
8,41
8,78
13,80
4
4
170
330
267
139
202
176
249
104
7 x 12
22,0
MT 05564023/
MT 5,5-60
5,5
60
8,26
13,80
4
243
267
139
202
176
249
104
7 x 12
22,0
MT 7,5-60
7,5
60
11,25
18,82
4
190
316
160
245
200
292
112 10 x 16
28
MT 11-60
11
60
16,40
27,61
4
280
352
165
300
224
328
117 10 x 16
41
Tab. 13-18: Dane techniczne
B
L1
d
L2
L3
H
T
Jedn.: mm
Napięcie pierwotne 400 V
Napięcie wtórne 230 V

Wymiary i masa
Autotransformatory
13 - 18

Autotransformatory
Wymiary i masa
Serwonapędy MELSERVO MR-J2-Super-A
13 - 19
NOTATKI:

Wymiary i masa
Autotransformatory
13 - 20
Document Outline
- Funkcje użytkowe i konfiguracja
- 2 Montaż
- 3 Podłączanie
- 3.1 Podłączanie serwowzmacniacza
- 3.1.1 Wyłącznik nadprądowy, bezpieczniki, stycznik, przewody połączeniowe
- 3.1.2 Listwy zaciskowe obwodów mocy i sterowania
- 3.1.3 Podłączanie obwodów sterowania
- 3.1.4 Interfejsy wejsciowe i wyjsciowe
- 3.2.1 Podłączanie serwosilnika
- 3.2.2 Podłączanie serwosilnika
- 3.8.1 Przykładowe schematy połączeń dla trybu regulacji położenia
- 3.8.2 Przykładowe schematy połączeń dla trybu regulacji prędkosci
- 3.8.3 Przykładowe schematy połączeń dle trybu regulacji momentu
- 4 Użytkowanie serwonapędu
- 4.1 Przed pierwszym uruchomieniem
- 4.2 Uruchomienie
- 4.2.1 Wybór trybu sterowania
- 4.3.1 Sposób użytkowania wyswietlacza i klawiatury
- 4.3.2 Sygnalizacja stanu pracy
- 4.3.3 Wyswietlanie danych diagnostycznych
- 4.3.4 Komunikaty alarmowe
- 4.3.5 Parametry
- 4.4.1 Dostrajanie współczynników wzmocnienia
- 4.4.2 Dostrajanie wartosci współczynników wzmocnienia z pomocą oprogramowania narzędziowego
- 4.4.3 Autotuning
- 4.4.4 Ręczne ustawianie współczynników wzmocnienia
- 4.4.5 Interpolacja
- 4.4.6 Różnice między funkcją autotuningu w serwowzmacniaczach serii MR-J2 i MR-J28
- 5 Funkcje specjalne
- 6 Komunikacja
- 6.1 Konfiguracja systemu
- 6.1.1 Komunikacja RS422
- 6.1.2 Komunikacja RS232C
- 6.4.1 Kody błędów
- 6.4.2 Błąd sumy kontrolnej
- 6.4.3 Time-out
- 6.4.4 Wznowienie komunikacji
- 6.4.5 Inicjalizacja
- 6.4.6 Przykład komunikacji
- 6.5.1 Polecenia odczytu
- 6.5.2 Instrukcje zapisu
- 6.6.1 Przetwarzanie danych
- 6.6.2 Komunikat stanu
- 6.6.3 Parametry
- 6.6.4 Stan wejsć/wyjsć (diagnostyka I/O)
- 6.6.5 Zablokowanie i odblokowanie sygnałów wejsciowych (DI)
- 6.6.6 Przełączanie stanu wejsć (operacje próbne)
- 6.6.7 Operacje próbne
- 6.6.8 Przełączanie sygnałów wyjsciowych ON/OFF (wymuszanie stanów wyjsć dwustanowych DO)
- 6.6.9 Historia alarmów
- 6.6.10 Bieżący alarm
- 6.6.11 Inne polecenia
- 7 System pozycjonowania absolutnego
- 8 Wyposażenie i elementy opcjonalne
- 9 Konserwacja i przeglądy
- 10 Wykrywanie i usuwanie usterek
- 11 Dane techniczne
- 12 Zasady kompatybilnoœci elektromagnetycznej
- 13 Wymiary i masa
Wyszukiwarka
Podobne podstrony:
MR J2S A Podrecznik obslugi
MR J2S A Podrecznik obslugi
FX1S podrecznik obslugi
Podręcznik obsługi klienta 1 78
Podrecznik obslugi klienta
Podrecznik obslugi klienta podok
podrecznik obslugi sekwencyjnego wtrysku gazu brc sequent 24 opracowanie i
maly podrecznik obslugi klienta
ALPHA PODRECZNIK OBSLUGI
FX1S podrecznik obslugi
Podręcznik obsługi klienta 1 78
Podrecznik obslugi klienta podok
Podrecznik obslugi faceta Zasady uzytkowania facet
Podrecznik obslugi faceta Zasady uzytkowania facet
MR J2S CL Prezentacja
więcej podobnych podstron