
SYSTEM KOMPUTEROWY
1. Przedstawianie danych w
komputerze
System dziesiętny 0-9
System dwójkowy 0-1
5
4
3
P=10
10
2
+ 10
1
+ 10
0
100x5 + 10x4 + 1x3
500
40
3
2. Systemy liczenia (numeracji)
-
Pozycyjne (dziesiętny, dwójkowy…)
-
Niepozycyjne (rzymski)
System dwójkowy
27= (11011)
(p=2)
2423222120
BIT – najmniejsza jednostka informacji, która może wyrażać jedną z dwóch
możliwych stanów (1lub 0)
2
1
– 2 stany można zakodować (0 lub1)
27
13
6
3
1
2
2
2
2
1
1
0
1
System
czwórkowy
27
6
1
4
4
3
2
27=(1 2 3)
(p=4)
4
2
4
1
4
0
16x1+4x2+3x1=27
System ósemkowy
(oktalny)
2
7
3
8
3
27=(3 3)
(p=8)
8
1
8
0
8x3+1x3=27
A
B
C
D
E
F
10
11
12
13
14
15
System szesnastkowy (heksadecymalny)
27
1
16
11
27= (1B)
(p=16)
WYKŁADY Z INFORMATYKI – SEMESTRT II
27= (01 10 11)
2
(zero od strony jest nieistotne ale
trzeba dopisać żeby była para)
212021202121= (123)4
1 2 3
DWA BITY to DIADA
27= (011 011) 27=(33)
8
22 21 20 22212
3 3
TRZY BITY to TRIADA
27= ( 0001 1011) 27=
(1b)
1
2
3
2
2
2
1
2
0
2
3
2
2
2
1
2
0
mnożymy w przypadku gdy to jest ułamek
dziesiętny,
wówczas mnożymy go przez
liczbę 2
0,32
0,64
1,28
0,56
1,12
2
2
2
2
0
1
0
1
0,32= (0,0 1 0 1)
2
(tam gdzie zera to się nie
przemnaża)
(są straty)
Budowa komórki pamięci
c-cecha
m-mantysa
p-podstawa numeracji
X= m x p
c
101110011,01
stałoprzecinkowe
X = m x 2
c
0,010011110011
zmiennoprzecinkowe
1 bajt
8 bitów
8 bitów
8 bitów
8 bitów
PÓŁSŁOWO PÓŁSŁOWO
1 SŁOWO= 32 bity
64 bity to słowo podwójne

Tabliczki
Dodawanie 5+10 dodawania mnożenia odejmowania
dzielenia
(101)
2
= (5) 0+0=0
0x0=0 1-0=1
0:1=0
(1010)
2
= (10) 1+0=1
1x0=0 0-0=0
1:1=1
(1111)
2
= (15) 0+1=1
0x1=0 10-
1=1 1:1- NIE
1+1=10
1x1=1
0:0 - NIE
Dodawanie 7+3
(111)
2
= (7)
(11)
2
= (3)
(1010)
2
= (10)
2
3
2
2
2
1
2
0
= 10

WYKŁADY Z INFORMATYKI – semestr II
System komputerowy to zorganizowany układ dwóch ze sobą
wzajemnie powiązanych elementów:
Pierwszy element to sprzęt (środki techniczne)
Drugi element to oprogramowanie (środki programowe)
Konfiguracja struktury technicznej zestawu komputerowego:
1. Moduł przygotowywania i wprowadzania danych
2. Moduł przetwarzania i przechowywania
3. Moduł wyprowadzania danych
4. Moduł transmisji danych
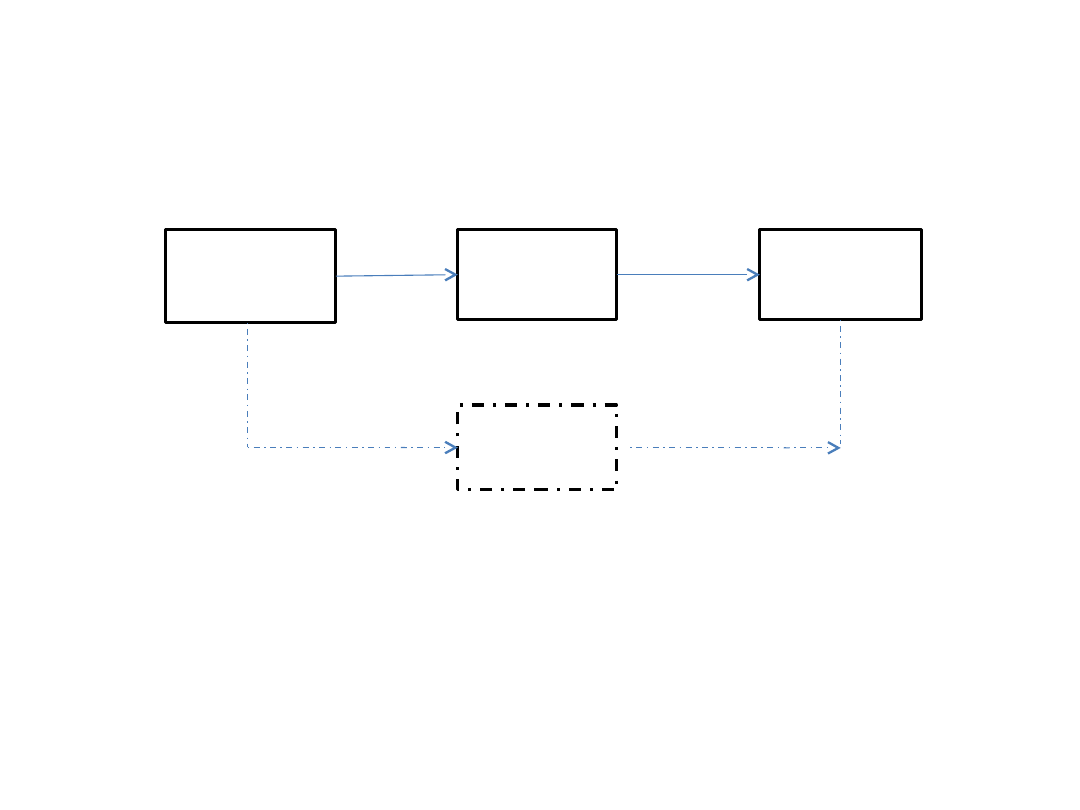
1
2
3
4

MODUŁ PRZYGOTOWANIA I WPROWADZANIA DANYCH (1) obejmuje
urządzenia umożliwiające zapisanie danych na nośnikach magnetycznych i
laserowych w postaci gotowej do automatycznego (odczytu) przetwarzania.
Przykładowe urządzenia do wprowadzania danych to: klawiatura, czytnik metek,
żetonów, kart identyfikacyjnych, czytniki znaków i dokumentów (skanery)
MASZYNIOWY NOŚNIK INFORMACJI (MNI) – dowolne tworzywo na którym można
zapisywać dane które są możliwe do automatycznego odczytywania
AUTOMATYCZNE REJESTRATORY DANYCH – urządzenia foniczne umożliwiające
wprowadzanie danych (informacji) głosem
MODUŁ WYPROWADZANIA DANYCH (3) obejmuje następujące rodzaje
urządzeń:
- monitory ekranowe (alfanumeryczne tam gdzie można wprowadzać znaki
standardowe graficzne – piksele)
- drukarki (igłowe, atramentowe, laserowe)
- mikrofilmy
- plotery (pisaki XY) (wyprowadzanie informacji w postaci graficznej – mapy plany
itp.)
- urządzenia foniczne, syntezatory mowy

MODUŁ PRZETWARZANIA I PRZECHOWYWANIA DANYCH (2)
procesor składa się z:
układ sterowania
układ arytmometru
pamięć lokalna
umożliwia on realizację, czyli pobiera z pamięci operacyjnej kolejne
rozkazy, dekoduje, oblicza adresy komórek pamięci w których
przechowywane
są
argumenty
operacji,
kontroluje
proces
wykonywania rozkazów oraz steruje arytmometrem. Czynności
pobierania, wykonywania rozkazu stanowią tzw. cykl pracy procesora.
ARYTMOMETR - zespół rejestrów , w których przechowywane są
argumenty aktualnie wykonywanych operacji. Jego podstawową
funkcją jest wykonywanie wszystkich operacji arytmetycznych i
logicznych.

PAMIĘĆ LOKALNA – stosowana w procesach w celu krótkotrwałego
przechowywania argumentu wykonywanej operacji, pozwala na zmniejszanie
liczby odczytów, zapisów z pamięci operacyjnej.
Mikroprocesory można podzielić ze względu na długość słowa którym operują.
Są 8-bitowe, 16,32,64 (80lata), 128.
Pierwszy procesor posiadał 8,7 MHZ i był z firmy IBM
Kanały WE/WY (wejścia wyjścia) – umożliwiają sterowanie przepływem
danych między jednostką centralną lub pamięcią operacyjną jednostki
centralnej a urządzeniami zewnętrznymi, podłączonymi do procesora.
PAO
sterowani
e
arytmome
tr
Kanały
WE/WY
PAL
PAZ
procesor
Pamięć operacyjna (PAO) (inaczej wewnętrzna) – służy do
przechowywania
fragmentu
systemu
operacyjnego,
aktualnie
wykonywanego programu oraz danych przetwarzanych w określonym
momencie
ROM (read only memory) – pamięć tylko do odczytu danych, posiada
zazwyczaj jądro systemu operacyjnego
RAM – pamięć do zapisu i odczytu danych i programów

Wyżej wymienione urządzenia MIKROPROCESOR, ROM, RAM oraz KANAŁY WE/WY
są połączone ze sobą za pomocą 3 magistral:
- magistrala adresowa – po której mikroprocesor wysyła adresy pamięci lub
urządzeń zewnętrznych
- magistrala danych – przesyłane są informacje a konkretnie kody rozkazów i
dane między procesorem a układami współpracującymi to jest ROM RAM i
urządzenia zewnętrzne
- magistrala sterująca – po której mikroprocesor przesyła sygnały określające
rodzaj operacji jaką ma wykonać układ współpracujący
PAMIĘCI ZEWNĘTRZNE (PAZ) ( wspomagają pamięć operacyjną)
rozszerzają PAO, przechowywane są w niej programy, dane które znajdują się
przez „dłuższy czas” posiadają dłuższy czas dostępu do danych w porównaniu z
PAO
Ms=10
-3
ums=10
-6
ns=10
-9
(PAO) ps=10
-12
10
-18
– w dniu dzisiejszym pracuje się nad takimi wielkościami
PAO na=10
-9
10-80ns
PAZ (DYSKI) ms=10
-3
5ms-15ms/200ms (DYSKIETKI)

PAMIĘCI ZEWNĘTRZNE SSD (Solid State Drivie) – sa to pamięci
mikroelektroniczne
- Pojemność od 4GB- 512GB do 1TB
- Czas dostępu od 0,04ms-40ms
Rodzaj PAZ
Taśmy magnetyczne półcalowe (pojemność od kilkuset milionów do kilkuset
miliardów bajtów), średni czas dostępu to ok. 2,5 min.
Dyski magnetyczne, przedziały pojemności40 GB-1,5 TB, zespalane są w
macierze dyskowe
Jednostki mary używane do określania pojemności pamięci
1 kB(kilo)- 1024B 10^3 kibibajt KiB 2^10
1 MB(mega) – 1000kB 10^6 mebibajt MiB 2^20
1 GB(giga) – 1000MB 10^9 gigibajt GiB 2^30
1 TB(tera) – 1000GB 10^12 tebibajt TiB 2^40
1 PB(peta) – 1000TB 10^15 pebibajt PiB 2^50
1 EB9eksa)- 1000PB 10^18 eksbibajt EiB 2^60
1 ZB(zetta) – 1000EB 10^21 zebibajt ZiB 2^70
1 YB(jotta) – 1000ZB 10^24 jibibajt YiB 2^80

Podstawowe parametry decydujące o
przydatności i zastosowaniu danego rodzaju
pamięci zewnętrznej:
- pojemność pamięci
- szybkość pracy pamięci
- koszt przechowywania 1 bajtu informacji
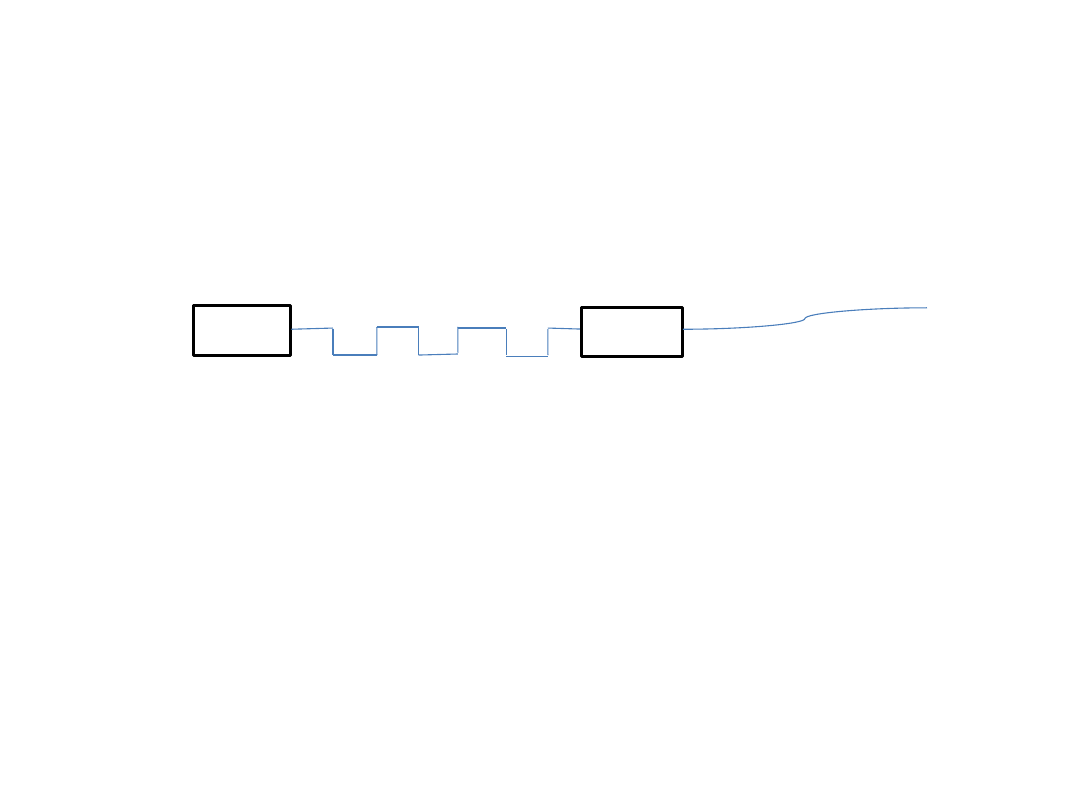
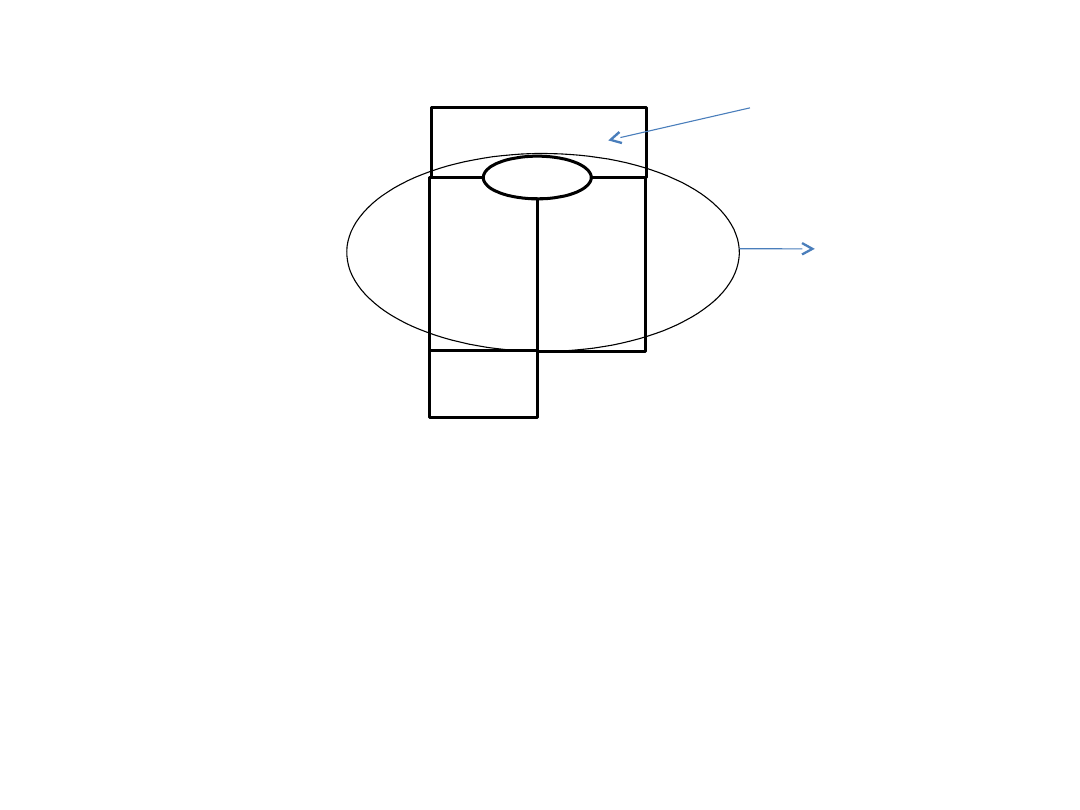
MODUŁ TRANSMISJI DANYCH (4) występuje opcjonalnie. Łącza
telekomunikacyjne, urządzenia dopasowujące linie (modem- zmienia sygnał
analogowy na cyfrowy i odwrotnie)
K
M
Sygnał cyfrowy
Sygnał
analogowy
0
0
Urządzenia sterujące transmisją danych – multipleksery
Multipleksor, koncentratory danych
Multipleksor dzieli kanał na podkanały
Urządzenia zabezpieczające przed błędami
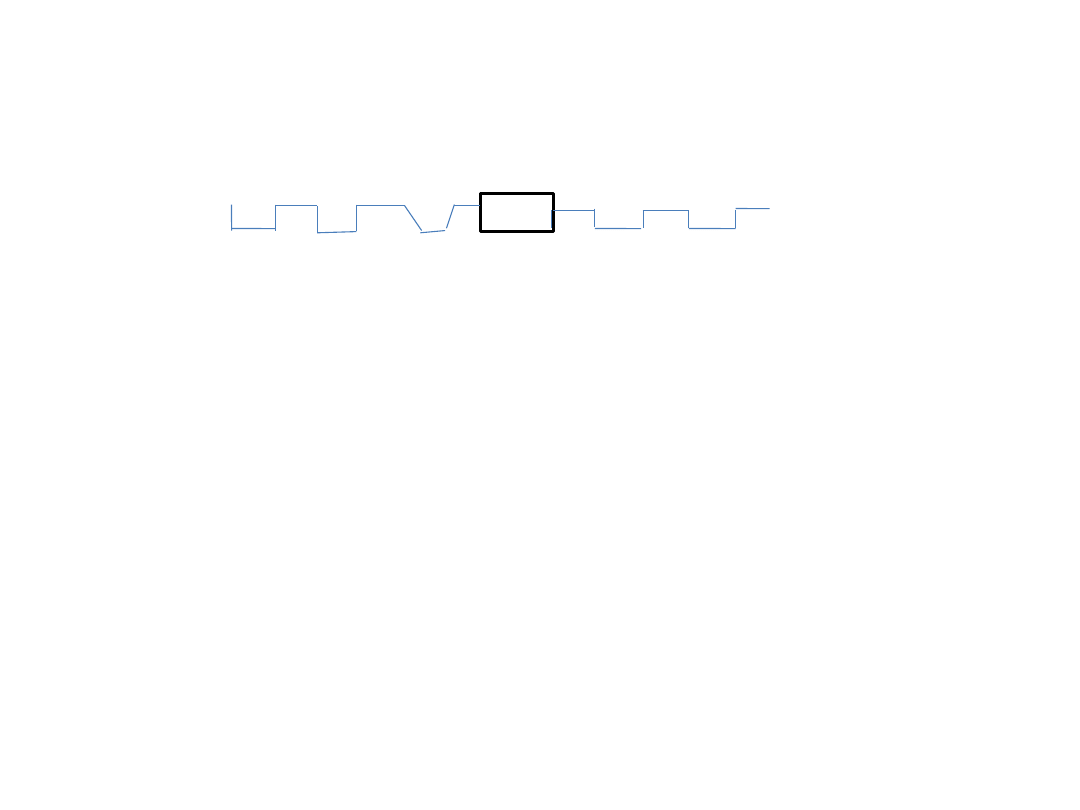
zniekształcone
sygnały
W
Wzmacniacz sygnału
Document Outline
- SYSTEM KOMPUTEROWY
- 1. Przedstawianie danych w komputerze
- 2. Systemy liczenia (numeracji)
- Slide 4
- Slide 5
- WYKŁADY Z INFORMATYKI – SEMESTRT II
- Slide 7
- Slide 8
- Slide 9
- WYKŁADY Z INFORMATYKI – semestr II
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
Wyszukiwarka
Podobne podstrony:
10 Reprezentacja liczb w systemie komputerowymid 11082 ppt
wyklad 2012 10 25 (Struktury systemów komputerowych)
Abstrakcyjne wyobrażenie elementów systemu komputerowego
Podstawy Informatyki Wykład V Struktury systemów komputerowych
Opis oprogramowania wspomagające analizę komponentów systemu komputerowego, Prace kontrolne
Bezpieczeństwo systemów komputerowych
Niektóre prawne aspekty włamań do systemu komputerowego
tranzystory mosfet(1), Architektura systemów komputerowych, Sentenza, Sentenza
sciaga-skrocona, Informatyka Stosowana, Architektura systemów komputerowych, ASK
ukl 74xx, Informatyka PWr, Algorytmy i Struktury Danych, Architektura Systemów Komputerowych, Archit
Architektura systemów komputerowych przeliczanie systemów, Notatki
Bezpieczeństwo systemów komputerowych
Analityk systemów komputerowych 213103
T 3 Architektura systemow komputerowych wytyczne
Systemy Komputerow- pamięć podręczna, TZN, Systemy Operacyjne i Sieci
Laboratorium Systemów Komputerowych
Podstawowe pojęcia dotyczące systemu komputerowego
ASK, Informatyka Stosowana, Architektura systemów komputerowych, ASK
więcej podobnych podstron