dr inż. Mariusz Frukacz Ćwiczenia z geodezji II
Transformacja współrzędnych prostokątnych płaskich sposobem Helmerta Transformacja czteroparametrowa Helmerta wyrażona jest wzorami: X = c + bx − ay
i
i
i
Y = d + ax + by
(1)
i
i
i
gdzie
xi, yi – współrzędne i-tego punktu w układzie pierwotnym, Xi, Yi - współrzędne i-tego punktu w układzie wtórnym.
Wyznaczenie parametrów transformacji i ocena dokładności
1. Obliczenie wsp. środków ciężkości w obu układach (tylko z punktów dostosowania):
[ x ]
[ y ]
[ X ]
[ Y ]
i
= x ; i = y ; i = X ; i = Y
(2)
0
n
0
n
0
n
0
n
2. Centrowanie współrzędnych (obliczenie wsp. zredukowanych o środki ciężkości): ( y − y = y
∆ , ( x − x = x
∆ , (X − X = X
∆ , (Y − Y = Y
∆
(3)
i
0 )
i
0 )
i
0 )
i
0 )
i
i
i
i
3. Wyznaczenie parametrów transformacji: n
n
∑ (∆x Y
y X
∑ (∆x X
y Y
i∆
i + ∆ i∆
i )
i∆
i − ∆
i∆
i )
i =
a = 1
;
i =
b = 1
(4)
n
n
∑ (∆ 2
x + ∆ 2
y
∑ (∆ 2
x + ∆ 2
y
i
i )
i
i )
i =1
i =1
c = y a − x b + X ; d = − x a − y b + Y
(5)
0
0
0
0
0
0
Jeśli (5) podstawimy do (1) to otrzymamy drugą wersję wzorów na transformację: X = X + x − x b − y − y a i
0
( i 0) ( i 0)
Y = Y + x − x a + y − y b (6)
i
0
( i 0) ( i 0)
4. Obliczenie poprawek dla punktów dostosowania: t
V
= X − X ;
t
V = Y − Y
(7)
X
i
i
Y
i
i
i
i
5. Ocena dokładności
2
2
∑ V
∑ V
i
i
m =
⇒ m =
(8)
0
0
2 n − u
2 n − 4
Jako kryterium oceny dokładności transformacji, w formie zgeneralizowanej, możemy podać 1
warunek m ≤
m
, gdzie m
jest dopuszczalnym średnim błędem położenia punktu w 0
p dop.
p dop.
2
określonej klasie osnowy.
dr inż. Mariusz Frukacz
Ćwiczenia z geodezji II
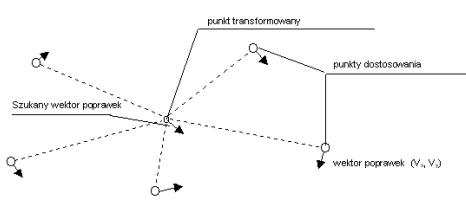
6. Obliczenie korekt post-transformacyjnych Hausbrandta: n
n
∑ (r V
∑ (r V
ji
i
Y )
ji
Xi )
i =
V
;
i =
V
(9)
Y
= 1
X
= 1
j
n
j
n
∑ r
∑ r
ji
ji
i =1
i =1
gdzie
1
1
r =
=
(10)
ji
2
2
2
d
(X − X ) + (Y − Y )
i
j
i
j
ji
rji – waga (i = 1, 2, ... , n),
n – liczba punktów dostosowania.
Elementy przyjęte do liczenia wag i ich oznaczenia zastosowane we wzorach (9) i (10) zilustrowano na rysunku.
7. Obliczenie ostatecznych wartości współrzędnych: X =
+
= +
j
X
V ;
Y
Y
V
(11)
j
X
j
j
Y
j
j
Wyznaczenie parametrów transformacji z zapisu macierzowego układu równań poprawek
1. Ułożenie równań poprawek (wprowadzając (1) do (7)): V
= y a − x b − c + X
X
1
1
i
1
V = − x a − y b − d + Y
Y
1
1
i
1
........................................
(12)
V
= y a − x b − c + X
X
n
n
n
n
V = − x a − y b − d + Y
Y
n
n
n
n
2. Zapis macierzowy wzorów (12) ma następującą postać: V = AX + L
(13)
dr inż. Mariusz Frukacz Ćwiczenia z geodezji II
gdzie
y − x −1 0
V
1
1
1
X
X
− x − y 0 −1
1
a
V
1
1
Y
1
Y
1
...................
b
⋮
= V
=
=
⋮ =
A
X
L (14)
...................
c
V
X
X
n
y x 1 0
− −
d
n
n
n
V
Yn
n
Y
− x − y 0 −1
n
n
3. Stosując warunek Φ = VTV = min obliczamy wektor parametrów 1
−
X = −(ATA) ATL
(15)
Punkty 4 –7 bez zmian.
Przykład:
Układ pierwotny:
Nr
X
Y
1
0.000
0.000
2
0.000
10.000
3
15.000
5.000
4
3.000
7.000
5
10.000
4.000
Układ wtórny:
Nr
X
Y
1
120.006
99.987
2
100.015
100.008
3
109.985
130.003
Wyszukiwarka
Podobne podstrony:
GeoII Temat07 Algorytm MaF
GeoII Temat04 Algorytm MaF
GeoII Temat01 Algorytm MaF
Temat 1 GeoII-Temat01-MaF
GeoII Temat06 MaF
Temat 5 GeoII-Temat05-MaF
GeoII Temat03 MaF
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
Temat 12 wcięcie przestrzenne GeoII-Temat11-MaF
Temat 11 niwelacja trygonometryczna GeoII-Temat10-MaF
cps tablica transformat, Edukacja, studia, Semestr IV, Podstawy i Algorytmy Przetwarzania Sygnałów
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
T7 Transformacja układu odniesienia
więcej podobnych podstron