st. kpt. dr inż . Piotr KUSTRA
Zakład Technicznych Systemów Zabezpieczeń
SGSP
ŚWIATŁOWODOWE CZUJKI CIEPŁA
W artykule przedstawiono możliwości wykorzystania światłowo-
dów jako czujek temperatury, a w szczególności wykorzystania
techniki światłowodowej w dziedzinie detekcji pożarów.
The article presents possibilities of optical fibre use in heat
detectors, especially the use of optical fibre technique in fire detec-
tion.
Poprawna ochrona z punktu widzenia bezpieczeństwa pożarowego obiektów
w trudnych warunkach środowiskowych zawsze stanowiła poważny problem.
Obecność agresywnych środków chemicznych, ograniczony dostęp do chronionych
przestrzeni, wysoki poziom radiacji, silne pola elektromagnetyczne ograniczają
w zasadniczy sposób możliwości stosowania klasycznych metod detekcji pożaru.
W wielu przypadkach przy monitorowaniu rozległych struktur inżynierskich (tune-
le drogowe, garaże podziemne, tunele kablowe itp.) jedynie zastosowanie czujek
światłowodowych z rozłożoną detekcją temperatury pozwala na poprawną detekcję
i sygnalizację zagrożenia pożarowego. Związane jest to z budową i zasadą prze-
twarzania sygnału pierwotnego, jakim jest czujnik światłowodowy.
W czujniku światłowodowym zmiana temperatury otoczenia jako wielkość
wejściowa przetwarzana jest na odpowiedni sygnał optyczny, który w przetworni-
ku fotoelektrycznym zamieniany jest na sygnał elektryczny. W artykule omówione
zostaną dwa rodzaje czujek światłowodowych. W pierwszym przypadku przetwor-
nik światłowodowy wykorzystuje mechanizm rozpraszania światła od odkształco-
nych powierzchni światłowodu. Wykorzystuje się przy tym parametr pomiarowy
δ
[ A δ
/ t ω
] . Parametr ten reprezentuje zmianę w czasie amplitudy mocy optycznej
rozproszenia wstecznego typu Reyleigha (lub zmianę strat transmisji w czujniku
z dwustronnym dostępem). Taki czujnik może mierzyć zarówno oddziaływanie pól
statycznych, jak i zmiennych w czasie. W obu tych przypadkach pozostaje problem
kalibracji mocy optycznej sygnału i eliminacji wpływu dryftu mocy optycznej
źródła. Czujniki te znane są jako reflektometryczne OTDR (Optical Time Domian
Reflectometry), w tym przypadku wielkością pomiarową jest lokalna zmiana strat
rozproszenia wstecznego wywołana oddziaływaniem siły zewnętrznej na zgięcie
(odkształcenie) światłowodu. Impuls świetlny pobudza światłowód. Światło na
drodze propagacji ulega rozproszeniu Rayleigha. Część rozproszonej mocy
optycznej mieszcząca się w aperturze światłowodu rozchodzi się jako impuls
wsteczny [2, 5, 6]. W drugim zaś rodzaju czujki światłowodowej wykorzystywane
jest zjawisko rozpraszania światła na cząstkach elementarnych, które w fizyce zna-
ne jako rozpraszanie Ramana.
Jako pierwsza zostanie omówiona czujka wykorzystująca zjawisko rozprasza-
nia wywołane mechanicznym odkształceniem powierzchni światłowodu. Czujka ta
popularność zdobyła pod nazwą Fibrolaser 1. Zasadę działania omawianej czujki
przedstawiono na rys. 1.
lustro
światłowód
oplot przewężający się w wysokiej temp.
źródło
światła
laserowe
przewężenie
światłowodu
pożar
fotodetektor
impulsowy strumień
światła źródła laserowego
impulsowy strumień światła odbity od płaszczyzny
zamykającej światłowód
pomiar czasu opóźnienia
impuls odbity od miejsca przewężenia
∆ T( ∆ l )
T
czas opóźnienia
Rys. 1. Schemat ideowy oraz zasada działania czujki ciepła − ś wiatłowodowej [1]
Jak pokazano na rys. 1., światłowodowa czujka ciepła jest optoelektronicznym
detektorem pożaru. Składa się ona z lasera emitującego impulsy o stałym natężeniu
światła, światłowodu specjalnej konstrukcji, lustra półprzepuszczającego światło
oraz układu pomiarowego (kontrolera). Czujnikiem temperatury w tym przypadku
jest światłowód umieszczony w oplocie wykonanym z włókien termokurczliwych
(aramidowych-kevlarowych). Całość umieszczona jest w rurce metalowej. Prze-
strzeń pomiędzy światłowodem a rurką wypełniona jest woskiem w celu ochrony
światłowodu przed narażeniami mechanicznymi pochodzącymi z chronionego
otoczenia. Taka konstrukcja światłowodu pozwala na bezawaryjną pracę, jak rów-
nież powoduje, że nie są potrzebne jakiekolwiek czynności serwisowe podczas
eksploatacji światłowodu. W warunkach braku zagrożenia pożarowego strumień
światła laserowego wprowadzonego do światłowodu ulega pełnemu wewnętrzne-
mu wielokrotnemu odbiciu od jego powierzchni bocznej i od jego skrajnej płasz-
czyzny zamykającej światłowód i po odbiciu przez zwierciadło półprzepuszczalne
kierowany jest na fotodetektor. Po wzmocnieniu impulsy wyjściowe fotodetektora
podawane są do licznika impulsów spełniającego rolę czasomierza. Na wejście
tego samego licznika impulsów podawany jest sygnał elektryczny bezpośrednio z
generatora zasilającego źródło światła (laser).
Opóźnienie strumienia światła powrotnego i padającego na drodze optycznej,
jaką jest światłowód, jest stałe i zależne tylko od dwukrotnej długości światłowo-
du, jak również od prędkości, z jaką rozprzestrzenia się światło na drodze optycz-
nej. Na rys. 1. pokazano to jako czas opóźnienia T pomiędzy dwoma strumieniami
światła padającego i powrotnego (odbitego). W warunkach pożaru strumień ciepła
powstały podczas procesu spalania podgrzewa światłowód. W miejscu podgrzania
światłowód ulegnie miejscowemu odkształceniu (jest to proces odwracalny) pod
wpływem działania sił ściskających powstałych w oplocie termokurczliwym.
W miejscu odkształcenia światłowodu strumień światła padającego ulegnie częś-
ciowemu rozproszeniu, zaznaczono to na rys. 1. linią przerywaną.
Druga (znacznie większa) część strumienia dociera do płaszczyzny skrajnej
zamykającej światłowód, zaznaczono ją na tymże rysunku linią ciągłą. Obydwa
strumienie świetlne podawane na wejście fotodetektora i po zamianie na sygnały
(impulsy) elektryczne podawane są na wejście układu pomiaru czasu [1]. Czas
opóźnienia pomiędzy strumieniem światła padającego i powrotnego (odbitego od
miejsca przewężenia) w warunkach pożaru zaznaczono na rys. 1. strzałką oraz
symbolem ∆T(∆l) . Symbolu ∆T(∆l) użyto, gdyż czas opóźnienia jest funkcją
drogi przebytej przez strumień światła. Droga ta jest równa podwojonej długości
światłowodu, licząc od jego początku do miejsca przewężenia powstałego w wyni-
ku oddziaływania wysokiej temperatury. Czas opóźnienia zależał będzie od miej-
sca wystąpienia przewężenia. Gdyby światłowód uległ podgrzaniu w połowie jego
długości, to czas opóźnienia ∆T(∆l) wiązki światła odbitego od miejsca przewę-
żenia będzie równy połowie czasu opóźnienia ∆T pomiędzy strumieniami padają-
cym i powrotnym w warunkach normalnych. Częstotliwość impulsów świetlnych
jest tak dobrana, aby można było uzyskać identyfikację miejsca odkształcenia
(stresu) kabla światłowodowego w wysokiej temperaturze z dokładnością do 1−2
metrów, przy długości kabla światłowodowego nie przekraczającej 1500 m [1].
Omawiana technika pomiaru natężenia strumienia światła rozpraszania
wstecznego wywołanego defektem struktury światłowodu znajduje szerokie zasto-
sowanie w telekomunikacji światłowodowej w celu lokalizacji uszkodzeń linii
światłowodowej oraz do oceny jakości połączeń odcinków linii światłowodowej.
Znana jest pod nazwą reflektometrii w dziedzinie czasu [3, 5]. Detektor temperatu-
ry światłowodowej czujki ciepła cechuje się praktycznie całkowitą odpornością na
wpływy zakłóceń pochodzących od pól elektromagnetycznych, wilgotności, zmia-
ny ciśnienia, zmiany temperatury otoczenia. Wykazuje również wysoką odporność
na oddziaływania chemiczne, zabrudzenia pochodzące z otaczającego środowiska,
np. w tunelach drogowych. Wymienione wyżej zalety omawianej czujki wynikają
stąd, że przetwornikiem pierwotnym temperatury jest w tym przypadku układ
optyczny (światłowód–szkło), który jest niewrażliwy na te narażenia.
Wadą powyższego rozwiązania jest jednakowa wrażliwość na bodźce pocho-
dzące od źródła ciepła, jak również na oddziaływanie czynników mechanicznych
takich jak drgania mechaniczne podłoża, do którego zamocowana jest czujka świa-
tłowodowa. Ten stan rzeczy był przyczyną wielu fałszywych alarmów. Szczególnie
było to kłopotliwe w zabezpieczeniu tuneli komunikacyjnych, jak również
w przemyśle, gdzie wibracje podłoża są zjawiskiem codziennym.
Kłopoty z opanowaniem fałszywych alarmów doprowadziły do zaprzestania
produkcji i stosowania czujek światłowodowych tej konstrukcji. Innym rodzajem
liniowej czujki światłowodowej jest czujka wykorzystująca zjawisko rozpraszania
Ramana, popularnie nazywana czujką Fibrolaserową 2. Przetwornik pierwotny
temperatury jest zbudowany ze światłowodu (szkła kwarcowego), w którym wyko-
rzystywane jest zjawisko rozpraszania przez cząstki elementarne.
W 1923 r. A.G. Smekal zwrócił uwagę, że w promieniowaniu rozproszonym
przez cząstki elementarne powinny pojawić się obok fotonów o częstości promie-
niowania padającego νo fotony o częstościach ν ± ν o. W 1928 r. fizyk hinduski
Ch.V. Raman potwierdził doświadczalnie przewidywania A.G. Smekala, obserwu-
jąc rozproszenie w cieczy (benzenie). Fizycy rosyjscy G.S. Landsberg i L.I. Man-
delsztam potwierdzili obecność fotonów o częstościach ν ± ν o obok częstotliwości
podstawowej νo w widmie światła rozproszonego, a dotyczącego rozproszenia w
kryształach kwarcu. Sukces powyższych doświadczeń ugruntował podstawy me-
chaniki kwantowej, niepowodzenie zaś mogło je obalić.
Rozproszone widmo ramanowskie charakteryzuje się bardzo małą wartością
natężenia światła, stąd przez długie lata zjawisko to nie znalazło praktycznego
zastosowania. Dopiero technologia lat dziewięćdziesiątych dwudziestego wieku
pozwoliła na praktyczne wykorzystanie tego od dawna znanego zjawiska fizyczne-
go. Wykorzystanie zjawiska Ramana w technice wykrywania pożaru znane jest
jako liniowa czujka temperatury Fibrolaser 2.
Mechanizm rozpraszania ramanowskiego jest następujący: padające promie-
niowanie elektromagnetyczne (foton) indukuje w cząsteczce moment dipolowy
→
→
µ i = α E ,
gdzie α jest polaryzowalnością cząsteczki, czyli miarą zdolności do deformacji
rozkładu jej ładunków w polu elektrycznym.
Polaryzowalność jest tym większa, im słabiej związane są elektrony zewnętrz-
nych powłok z jądrami atomów. W czasie drgania cząsteczki powodującego perio-
dyczne zmiany jej struktury, zmienia się również polaryzowalność. Z powyższego
wynika, że jest ona funkcją współrzędnych q opisujących drgania cząsteczki:
α = α ( q )
Periodycznym zmianom współrzędnych q odpowiadają zmiany periodyczne
α (q), w przybliżeniu harmonicznym
α ( q ) = α cos 2πν t ,
o
gdzie ν jest częstością drgania, np. drgania normalnego w przypadku cząstek wie-
loatomowych.
Składowa pola elektrycznego fali E też zmienia się periodycznie:
E = E cos 2πν t
o
o , a więc indukowany w cząsteczce przez falę elektromagnetyczną
moment dipolowy µ i wynosi:
µ = α E cos 2πν t cos 2πν t
1
o
o
o
Stosując znany wzór trygonometryczny pozwalający zamienić iloczyn cosinu-
sów na ich sumę, otrzymamy następujące wyrażenie
1
µ = α E [cos 2π (ν −ν t) + cos 2π (ν +ν t) ]
1
o
o
o
o
2
Drgający indukowany moment dipolowy ma więc składowe ν −
o ν i ν o+ν.
Przedstawiony mechanizm rozpraszania ramanowskiego jest bardzo uproszczony.
Pełny opis teoretyczny tego zjawiska daje mechanika kwantowa. Schemat pozio-
mów energetycznych wynikających z rozważań mechaniki kwantowej przedsta-
wiono na rys. 2. Fotony padającego promieniowania o częstości ν o ulegają rozpro-
szeniu na cząsteczkach. Gdy po rozproszeniu promieniowania cząsteczka pozostaje
w tym samym stanie energii, to mamy wówczas do czynienia z rozpraszaniem bez
zmiany długości fali, któremu odpowiada środkowa linia ν o w dolnej części rys. 2.
Zdarza się jednak, że cząsteczka po rozproszeniu znajduje się na wyższym pozio-
mie rotacyjnym lub oscylacyjnym i rozproszony foton ma częstość zmniejszoną
o różnice energii rotacyjnych lub oscylacyjnych poziomów energetycznych.
Takiemu rozpraszaniu odpowiada linia ν −
o ν w dolnej części rys. 2. zwana li-
nią stokesowską. Jeżeli natomiast przed rozproszeniem cząsteczka znajdowała się
we wzbudzonym stanie rotacyjnym lub oscylacyjnym, to możliwe jest, że po roz-
proszeniu znajdzie się w stanie podstawowym. Rozproszony foton zwiększy swoją
częstość o różnice energii hν rotacyjnych lub oscylacyjnych poziomów energe-
tycznych. Odpowiada mu linia ν o+ ν pokazana w dolnej części rys. 2., zwana linią
antystokesowską.
Ponieważ we wzbudzonym stanie rotacyjnym, a zwłaszcza oscylacyjnym, jest
znacznie mniej cząstek niż w stanie podstawowym, przejścia antystokesowskie są
znacznie rzadsze, a linie im odpowiadające mają mniejsze natężenie [3].
V=2
V=1
ν −
o ν ν o νo+ ν
przejścia
przejścia
stokesowskie
antystokesowskie
Rys. 2. Schemat poziomów energetycznych i widmo Ramana czą steczki dwuatomowej; linią
przerywaną zaznaczono poziom niestacjonarny [3]
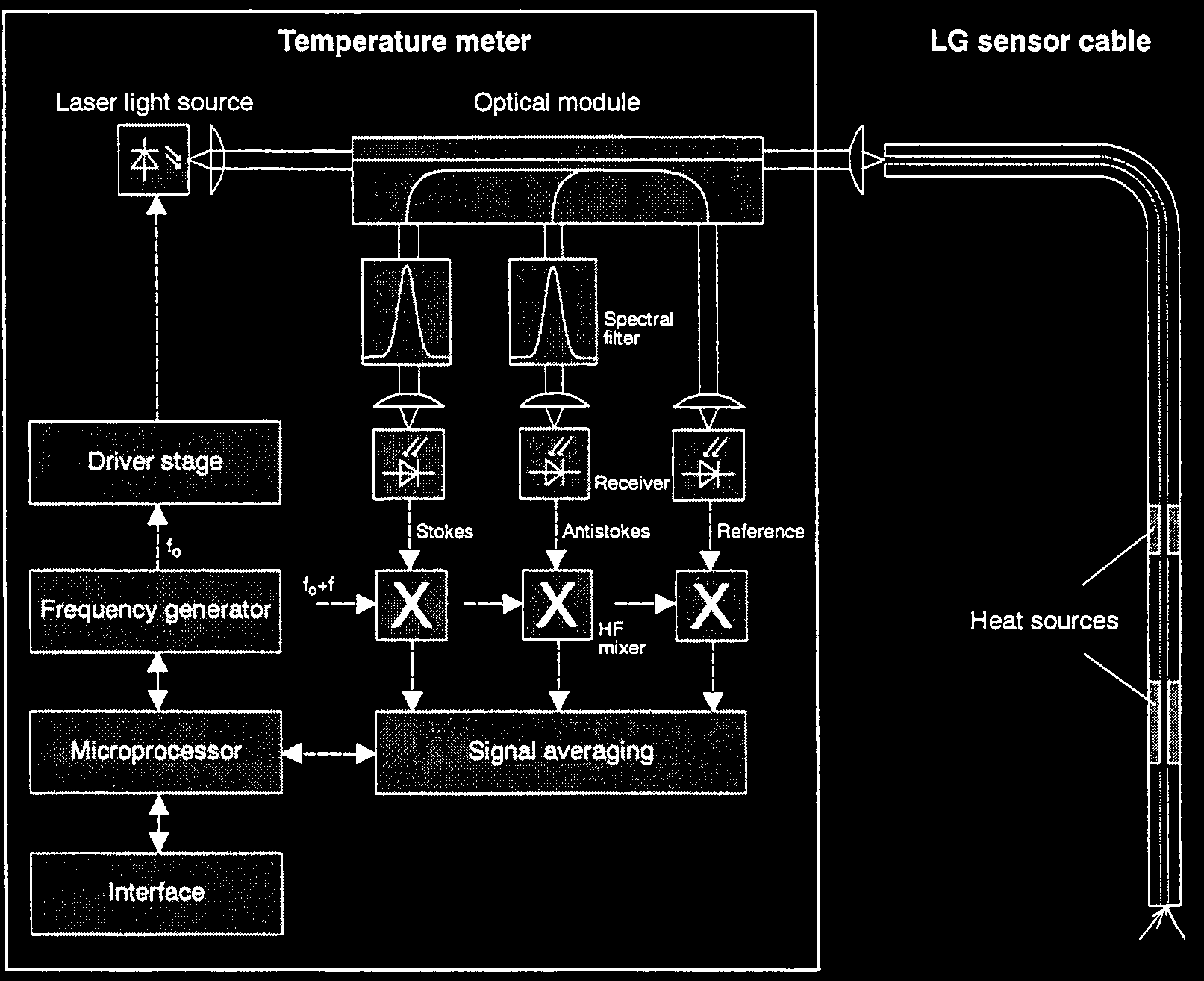
Idea wykrywania temperatury z wykorzystaniem zjawiska rozproszenia Ra-
mana przedstawiona została na rys. 3. [7]. Czujka składa się ze światłowodu wy-
konanego ze szkła kwarcowego, budowa którego charakteryzuje się przestrzenną
strukturą sieciową. Intensywność drgań węzłów sieci krystalicznej zależna jest od
temperatury otaczającego go środowiska. Źródłem światła jest w tym przypadku
laser o jednoprążkowej barwie (o długości fali równej 980 nm). Strumień światła
lasera oddziałuje na elektrony w atomach drgających węzłów sieci krystalicznej
w sposób ciągły, zgodnie z mechanizmem rozpraszania Ramana. Zgodnie z przed-
stawioną teorią w widmie światła rozproszonego pojawią się trzy prążki:
♦ prążek o częstotliwości ν o równej częstotliwości światła padającego (rozpra-
szanie Rayleygha);
♦ prążek o częstotliwości równej ν o+ ν, tzw. linia antystokesowska;
♦ prążek o częstotliwości równej ν −
o ν, tzw. linia stokesowska [4].
W metodzie OTDR opisanej w pierwszej części artykułu wykorzystuje się
echa impulsów świetlnych wprowadzanych do światłowodu, tak więc poziom roz-
praszania, jak również jego umiejscowienie są określone na podstawie różnicy
w czasach propagacji światła emitowanego oraz fali powrotnej. W porównaniu
z rozpraszaniem Rayleigha sygnał powstający w wyniku rozpraszania ramanow-
skiego (prążki o częstości wyższej i niższej od częstości światła padającego) jest
około 1000 razy słabszy. W odróżnieniu od metody OTDR zastosowana w czujce
Fibrolaser 2 metoda OFDR (ang. Optical Frequency Domian Refectometry) wyko-
rzystuje pomiar z zastosowaniem optycznego reflektometru w domenie częstotli-
wości. W przypadku metody OFDR informacje o lokalnych zmianach temperatury
uzyskuje się tylko po pełnym okresie pomiarowym potrzebnym do zmierzenia
sygnału rozpraszania wstecznego w funkcji częstotliwości (pomiar wektorowy –
zarówno fazy, jak i amplitudy) oraz wykonaniu odpowiednich transformacji
Fouriera.
Układ pomiaru temperatury
Światłowód
Moduł optyczny
Źródło światła laserowego
Filtr
widmowy
Układy sterowania
Odbiornik
Linie
Linie
Wiązka
stokesowskie
antystokesowskie odniesienia
Generator
częstotliwości
Mieszacz
Źródła ciepła
w.cz.
Mikroprocesor
Uśrednianie sygnału
Interfejs
Rys. 3. Schemat ideowy przedstawiają cy zasadę działania liniowej ś wiatłowodowej czujki ciepła z wykorzystaniem rozpraszania Ramana [7]
Podstawowe zalety metody OFDR to quasi-ciągła praca lasera oraz wąskie
pasmo detekcji sygnału optycznego rozpraszania wstecznego. Metoda ta w porów-
naniu z techniką impulsową pozwala uzyskać dużo wyższy stosunek sygnału do
szumu. Niestety, w tej metodzie wymagane jest wykonanie technicznie trudniej-
szego pomiaru rozpraszania ramanowskiego (wektorowego pomiaru fazy i ampli-
tudy), jak również przetwarzania sygnału z wykorzystaniem szybkiej transformaty
Fouriera (FFT). Z tego powodu stosowane pomiarowe układy elektroniczne muszą
się charakteryzować dobrą liniowością. Metodę OFDR opracowano dla potrzeb
pomiarów o wysokiej rozdzielczości stosowanych w badaniach właściwości świa-
tłowodów.
Na rys. 3. zamieszczono schemat ideowy systemu do pomiaru temperatury
z wykorzystaniem rozpraszania ramanowskiego oraz metody OFDR pomiaru sy-
gnału optycznego.
Omawiany system składa się z jednostki analizującej (generatora częstotliwoś-
ci, źródła światła laserowego, modułu optycznego, mieszacza w.cz., odbiornika
oraz układu mikroprocesorowego) i światłowodu kwarcowego wielomodowego
pełniącego funkcję liniowego czujnika temperatury. W systemie pomiarowym
wyróżnić można trzy kanały – dwa kanały pomiarowe (linii stokesowskich oraz
antystokesowskich) i jeden kanał odniesienia. Zgodnie z zasadą metody OFDR
sygnał wyjściowy lasera jest modulowany z częstotliwością zmieniającą się w cza-
sie pomiaru od kilku kHz do 100Mz.
Uzyskana w ten sposób dewiacja częstotliwości jest bezpośrednią miarą roz-
dzielczości przestrzennej reflektometru. Modulowane częstotliwościowo światło
lasera jest przesyłane do modułu optycznego czujki światłowodowej. Rozpraszanie
ramanowskie zachodzi w sposób ciągły. Rozproszone światło jest filtrowane wid-
mowo w module optycznym i przetwarzane przez fotodetektory na sygnał elek-
tryczny. Sygnał ten jest następnie wzmacniany i poddawany przemianie częstotli-
wości do zakresu niskich częstotliwości. Po uśrednieniu i wykonaniu transformacji
Fouriera sygnał niskiej częstotliwości zawiera dwie krzywe ramanowskiego roz-
praszania wstecznego. Amplituda krzywej rozpraszania wstecznego jest proporcjo-
nalna do natężenia rozpraszania ramanowskiego w odpowiednim punkcie światło-
wodu. Tak więc rozkład temperatury wzdłuż czujnika światłowodowego jest wy-
znaczany na podstawie stosunku amplitud sygnału w obu kanałach pomiarowych,
co pokazano na rys. 4a [7].
Maksymalna długość światłowodu wielomodowego czujki Fibrolaser 2 wynosi
4000 m. Związane jest to z tłumiennością drogi optycznej. Zakres temperatury
pracy światłowodu mieści się w przedziale od −30 ºC do +90 ºC.
W zależności od oprogramowania czujka zachowuje się jak element progowy
lub reagujący na dynamikę zmian temperatury w czasie w następujących
zakresach:
•
5 ºC czas reakcji minim. 4 min maks. 8 min,
•
10 ºC czas reakcji minim. 1 min maks. 4 min,
•
20 ºC czas reakcji minim. 30 s maks. 2 min.
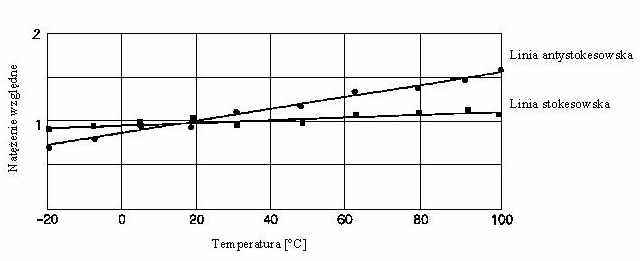
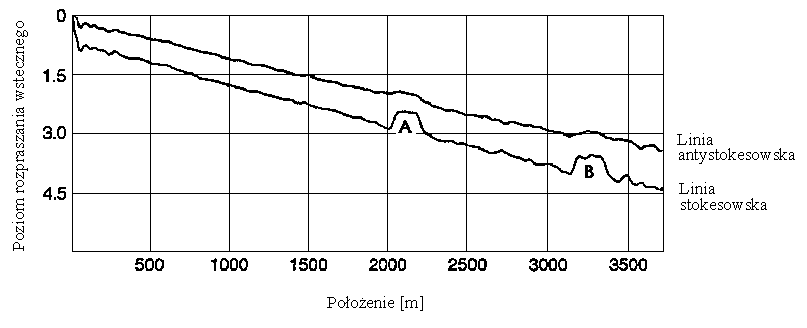
a)
b)
Rys. 4. Krzywe wstecznego rozpraszania ramanowskiego (litery A i B oznaczają zmiany
temperatury czujki ś wiatłowodowej Fibrolaser 2
a) zależ ność promieniowania stokesowskiego i antystkokesowskiego od temperatury
w miejscu podgrzania ś wiatłowodu;
b) zależ ność poziomu rozpraszania wstecznego – linii stokesowskich od odległoś ci
w ś wiatłowodzie [7]
Czujki tego typu są odporne na narażenia pochodzące z otaczającego je
środowiska, a mianowicie: zakłócenia polem elektromagnetycznym, odziaływania
mechaniczne, warunki atmosferyczne, fluktuacje temperatury, wysokie ciśnienia,
agresywne chemikalia, substancje o właściwościach korozyjnych itp. Do zalet tego
rozwiązania można zaliczyć:
♦ ciągłe monitorowanie całego obszaru chronionego,
♦ pecyzyjną lokalizację zmian temperatury zarówno quasi-statycznych, jak i dy-
namicznych,
♦ łatwe tworzenie stref ochrony przy użyciu oprogramowania,
♦ czujka w czasie eksploatacji nie ulega procesowi starzenia, jak również nie
zmienia właściwości detekcyjnych pod wpływem oddziaływania na nią
otaczającego środowiska, umożliwia to stosowanie jej do zabezpieczenia
miejsc trudno dostępnych,
♦ solidna konstrukcja z wewnętrznym płaszczem ze stali nierdzewnej oraz
płaszczem zewnętrznym z tworzywa sztucznego nie zawierającego halogenów.
Czujka może być stosowana wszędzie tam, gdzie nie można stosować
klasycznych detektorów pożaru ze względu na ciężkie warunki pracy, a miano-
wicie: tunele drogowe, taśmociągi transportowe, stalownie, rafinerie, dukty
przewodów elektrycznych, trudno dostępne miejsca w magazynach, zamknięte
przestrzenie pod schodami ruchomymi itp.
S U M M A R Y
Piotr KUSTRA
OPTICAL FIBRE HEAT DETECTORS
This article presents the possible application of optial fibres as compound
detectors. Description contains the application of optical fibre detectors in line
detectors of temperature. Two methods of temperature detection are presented in
this article the first-time domain reflectometry, and the second frequency domain
reflectometry based on the Raman’s dispersal effect. Article contains also the use
of this temperatuture detectors equipment in the fire protection.
PIŚMIENNICTWO
1. J. Ciszewski: Wstęp do automatycznych systemów sygnalizacji pożarowej.
Centrum Naukowo-Badawcze Ochrony Przeciwpożarowej. Józefów k. War-
szawy 1996.
2. M. Szustakowski, W. M. Ciurapiński: Czujniki światłowodowe z rozłożoną de-
tekcją. Instytut Optoelektroniki Wojskowej Akademii Technicznej. Praca
wykonana w ramach realizacji grantu KBN nr 8 T10C 027 08.
3. Encyklopedia fizyki współczesnej. PWN, Warszawa 1983.
4. Encyklopedia fizyki. PWN, Warszawa 1974.
5. J. C. Palais: Zarys telekomunikacji światłowodowej. WKiŁ, Warszawa 1991.
6. J. Petykiewicz: Podstawy fizyczne optyki scalonej. PWN, Warszawa 1989.
7. Dokumentacja techniczna „Liniowego systemu wykrywania pożarów Fibro-
laser 2” firmy Siemens Bulding Technologies – Cerberus Division.
Wyszukiwarka
Podobne podstrony:
CZUJKI DYMU WYKORZYSTUJĄCE ŚWIATŁO ROZPROSZONE DO POMIARU GĘSTOŚCI OPTYCZNEJ DYMU
Generacja i przepływ ciepła w oprawach oświetleniowych z diodami LED jako żródłami światła
CZUJKI DYMU WYKORZYSTUJĄCE ŚWIATŁO ROZPROSZONE DO POMIARU GĘSTOŚCI OPTYCZNEJ DYMU
Światłolecznictwo
16 Metody fotodetekcji Detektory światła systematyka
Polaryzacja światła
Zastosowanie światła w medycynie i kosmetologii
Odprowadzanie ciepła z podespołów komputera
ŚWIATŁOLECZNICTWO 1
wentylacja i rekuperacja ciepła
Wymiana Ciepla
Straty ciepla pomieszczen k
Efekt Cieplarniany
23 Pddzialywanie swiatla z materia
automatyczne swiatla
Michaels Fern Światła Las Vegas 03 Żar Vegas
Instalacja urządzeń grzewczych i wymienników ciepła
więcej podobnych podstron