EAIiE |
1. Paweł Ścipień 2. Mariusz Święs |
ROK I |
GRUPA V |
ZESPÓŁ 2 |
|||
Pracownia fizyczna |
Temat: Rezonans mechaniczny |
Nr ćwiczenia: 4 |
|||||
Data wykonania:
23.02.99 |
Data oddania:
|
Zwrot do popr.
|
Data oddania:
|
Data zaliczenia:
|
OCENA: |
||
Cel ćwiczenia
Zbadanie drgań wymuszonych oscylatora harmonicznego oraz pomiar rodziny oraz pomiar rodziny krzywych rezonansowych.
Wprowadzenie teoretyczne
Drgania mechaniczne - jest to ruch ciała powodowany zmienną siłą F , która jest zależna od wychylenia i przeciwnie do niego skierowana. F wyraża się wzorem : F= -kx ( k - współczynnik proporcjonalności, x - wychylenie od punktu równowagi), a z drugiej zasady dynamiki: F=m(d2x/dt2), stąd: m(d2x/dt2)+kx = 0 ,
(d2x/dt2)+(k/m)x = 0 i ω02=k/m ⇒
(d2x/dt2)+ω02x = 0 - rów. róż. oscylatora harmonicznego.
Rozwiązanie równania oscylatora ma postać: x=A0cos(ω0t+ϕ), (A jest amplitudą wychylenia).
Jest to przypadek idealny w rzeczywistości występują siły tłumiące proporcjonalne do prędkości ciała.
Z modyfikowane równanie ma postać: (d2x/dt2)+ω02x +b/m(dx/dt)= 0, po podstawieniu za b/m=2β otrzymujemy: (d2x/dt2)+2β(dx/dt)+ω02x = 0.
Rozwiązanie tego równania ma postać x=A0e-βtcos(ωt+ϕ), β-współczynnik tłumienia, a ω-częstotliwość drgań tłumionych, która jest związaną z częstotliwością drgań nie tłumionych wzorem ω=√(ω02-β2) .
W przyrodzie i technice zachodzą często przypadki, w których okresowa siła zewnętrzna działająca na oscylator kompensuje siłę tłumiącą i układ znajduje się w stanie drgań niegasnących i stałej amplitudzie.
Załóżmy, że siła wymuszająca jest opisana równaniem Fw=F0cos(Ωt)
Wówczas równanie ruchy przyjmuje postać: (d2x/dt2)+2β(dx/dt)+ω02x = F0cos(Ωt) z rozwiązaniem
W tym rozwiązaniu można wyróżnić część fazową i amplitudowa. Amplituda drgań dla pewnej wartości Ω=Ωrez ma wartość maksymalną. Zjawisko to nazywamy rezonansem.
3.Przebieg ćwiczenia
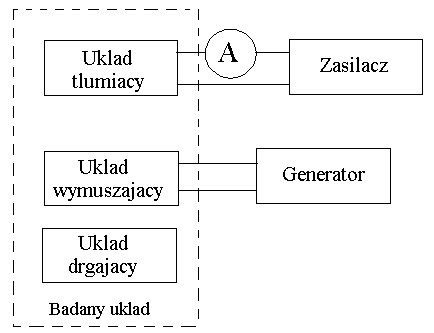
Schemat blokowy oscylatora mechanicznego
Układ drgający jest zbudowany z sprężyny, która jednym końcem utwierdzona jest na wsporniku. Drgania jaj wymuszone są za pomocą układu wymuszającego (po przez zmienne pole magnetyczne o regulowanej częstotliwości po przez generator. Koniec sprężyny można obserwować na skali. Do sprężyny przymocowany jest układ tłumiący, tłumienie to zależy od natężenia płynącego prądu przez ten układ. Prąd ten mierzymy amperomierzem.
Wykonanie ćwiczenia polega na zmontowaniu wyżej przedstawionego układu i wykonaniu szeregu pomiarów wychylenia układu drgającego w zależności od częstotliwości układu wymuszającego oraz prądu płynącego przez układ tłumiacy.
Wyniki pomiarów
Błędy pomiarowe
Wnioski
f(Hz) |
x(mm) Dla I=0A |
x(mm) Dla I=0,05A |
x(mm) Dla I=0,1A |
x(mm) Dla I=0,2A |
x(mm) Dla I=0,3A |
x(mm) Dla I=0,4A |
x(mm) Dla I=0,46A |
15.62 |
2 |
2 |
2 |
2 |
2 |
2 |
3 |
15.73 |
2 |
2 |
3 |
3 |
3 |
3 |
3 |
15.82 |
3 |
3 |
4 |
5 |
5 |
4 |
4 |
15.82 |
|
|
|
|
|
5 |
|
15.83 |
|
|
|
|
|
5 |
|
15.84 |
|
|
|
|
|
5 |
4 |
15.85 |
|
|
|
|
|
|
4 |
15.86 |
|
|
|
|
|
|
5 |
15.87 |
|
|
|
|
|
5 |
5 |
15.92 |
4 |
4 |
6 |
7 |
6 |
5 |
5 |
15.93 |
|
|
|
|
7 |
|
|
16.02 |
6 |
10 |
11 |
10 |
7 |
5 |
5 |
16.03 |
|
|
12 |
|
|
|
|
16.06 |
|
|
14 |
|
|
|
|
16.07 |
|
|
15 |
|
|
|
|
16.08 |
8 |
15 |
15 |
10 |
7 |
5 |
5 |
16.09 |
|
16 |
15 |
9 |
6 |
5 |
4 |
16.10 |
|
17 |
15 |
9 |
6 |
|
4 |
16.12 |
|
18 |
15 |
9 |
|
|
|
16.13 |
10 |
18 |
15 |
9 |
6 |
5 |
4 |
16.14 |
|
18 |
|
8 |
|
5 |
|
16.16 |
15 |
18 |
12 |
7 |
|
4 |
|
16.17 |
19 |
17 |
|
|
|
|
|
16.18 |
20 |
17 |
10 |
|
|
4 |
|
16.21 |
22 |
15 |
|
|
|
|
|
16.23 |
24 |
14 |
8 |
6 |
5 |
4 |
3 |
16.25 |
20 |
|
|
|
|
|
|
16.26 |
19 |
|
|
|
|
|
|
16.29 |
17 |
10 |
|
|
|
|
|
16.34 |
10 |
7 |
5 |
4 |
4 |
3 |
3 |
16.4 |
7 |
5 |
|
|
|
|
|
16.45 |
5 |
5 |
4 |
3 |
3 |
3 |
3 |
16.5 |
4 |
4 |
|
|
|
|
|
16.56 |
4 |
2 |
2 |
3 |
2 |
2 |
2 |
16.67 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
Wykres przedstawiający podane w tabeli wyniki dołączamy w załączniku.
Błędy pomiarowe w tym ćwiczeniu pochodzą przede wszystkim z niedokładność przyrządów i odczytu wartości pomiarowych.
Błąd odczytu wartości pomiarowych, czyli wychylenia wynosi dx=1mm.
Błąd wynikający z niedokładności przyrządów to przede wszystkim błąd częstotliwości wygenerowanej przez generator, który się waha w zależności od generowanej częstotliwości.
Wyraża się wzorem df=f1-f2, gdzie f1 pewna ustalona częstotliwość, f2 następna częstotliwość którą da się ustalić.
Odczytywanie częstotliwości było pośrednie dlatego błąd generowanej częstotliwości będzie błędem złożonym, obliczania częstotliwość dokonywaliśmy na podstawie wzoru który był podany na generatorze f=1000/(68-2x), gdzie x jest wartością ustawienia generatora.
Wartość x mogliśmy odczytać z przybliżeniem do 0.01, a wiec przy obliczeniach dokonywaliśmy przybliżeń co daje nam błąd obliczeniowy dfobl=0.005Hz.
Błąd wygenerowanej częstotliwości będzie zależny od samej częstotliwości dla stosowanych w ćwiczeniu częstotliwości wynosi on dfgen=0.0049-0.0056Hz.
Błąd częstotliwości drgań wymuszonych jest sumą kwadratową obu tych błędów :
Niewielki błąd w stosunku do różnic miedzy badanymi częstotliwościami i wychyleniami
pozwala na wyprowadzenie poprawnych wniosków z doświadczenia.
Im mniejsze tłumienie układu, tym częstość rezonansowa jest bliższa częstości drgań własnych układu nie tłumionego. W pierwszym przypadku przeprowadzaliśmy ćwiczenie dla prądu tłumiącego I=0A.W tym wypadku możemy założyć, że współczynnik tłumienia równy jest zero (zaniedbywanie mały). Podstawiając to do wzoru na częstotliwość rezonansową (otrzymaną w doświadczeniu) otrzymujemy częstotliwość drgań własnych układu :
Ωrez=ωo=16,23
0.0075Hz
Dzięki temu możemy obliczyć współczynnik tłumienia dla każdego następnego pomiaru (gdy I<>0A):
Dla I=0,05A
Dla I=0,1A
Dla I=0,2A
Dla I=0,3A
Dla I=0,4A
Dla I=0,47A
Czym większy współczynnik tłumienia tym maksymalne wychylenie układu jest mniejsze i bardziej rozciągnięte, to znaczy dla większego przedziału częstotliwości utrzymuje się maksymalne wychylenie układu drgającego.
Wyszukiwarka
Podobne podstrony:
Organy administracji do spraw ochrony środowiska
Dokumentowanie spraw bhp3, Służba-Bhp, Dokumentowanie spraw bhp
Tusk gra Polska, Film, dokument, publcystyka, Dokumenty dotyczące spraw bieżących
Seria zagadkowych śmierci i w Polsce i w Rosji, Film, dokument, publcystyka, Dokumenty dotyczące sp
378 audyt spraw, Audyt Wewnętrzny
Spraw 22b, Weterynaria Lublin, Biofizyka , fizyka - od Bejcy
spraw 4
~$spraw
spraw 5
Ebook Spraw 2 Netpress Digital
65 251102 konsultant do spraw systemow teleinformatycznych
Cw9 spraw PB szklo
79 w sprawie rzeczoznawców do spraw bezpieczeństwa i higieny pracy
Spraw. Ergon.1
równoważnik miedzi (spraw.), Studia SGGW, WNoŻ Inżynierskie 2008-2012, Sem II, Fizyka
Wiersz o bandycie, Film, dokument, publcystyka, Dokumenty dotyczące spraw bieżących
więcej podobnych podstron