Uniwersytet Warmińsko - Mazurski w Olsztynie
Wydział Geodezji i Gospodarki Przestrzennej
Katedra Fotogrametrii i Teledetekcji
Sprawozdanie nr 8
Orientacja i opracowanie stereogramu cyfrowych zdjęć lotniczych na autografie cyfrowym VSD AGH
(Video Stereo Digitizer)
1. OPIS BUDOWY AUTOGRAFU VSD ORAZ PROGRAMÓW NARZĘDZIOWYCH I APLIKACYJNYCH.
Video Stereo Digitizer AGH jest autografem cyfrowym o uproszczonej konstrukcji.
Program ten jest przeznaczony do opracowania czrno-białych lub kolorowych par cyfrowych obrazów fotogrametrycznych (stereogramów lub stereofotogramów).
VSD przygotowany jest do opracowania skanowanych obrazów lotniczych, naziemnych oraz satelitarnych. Program może być użyty w celu utworzenia bądź aktualizacji numerycznych map topograficznych, map tematycznych, także do sporządzania wektorowej dokumentacji architektonicznej, konserwatorskiej.Pary obrazów cyfrowych wyświetlonych na ekranie komputera typu PC obserwowane są przy pomocy stereoskopu zwierciadlanego.
Z wykorzystaniem VSD możliwe jest opracowywanie wektorowe pojedynczych fotogramów cyfrowych obiektów płaskich (przetwarzanie analityczne).VSD pracuje również w trybie mono lub stereokomparatora wykonując pomiar obrazów cyfrowych z dokładnością odpowiadającą ułamkom piksela zależną od skali powiększenia obrazu cyfrowego.W miarę potrzeb VSD może być zatem; autografem, przetwornikiem analitycznym zwektoryzowanych obrazów, monokomparatorem lub stereokomparatorem.
Programy narzędziowe:
DXF_ABS - konwersja pliku tekstowego typu DXF na plik binarny ABS (format własny VSD).
Program tworzy plik raportu o warstwach NazwaPlikuDXF.LRP , który zastąpiony plikiem NazwaPlikuDXF.LAY o podobnej budowie, umożliwia eliminację niepożądanych warstw i modyfikację kolorów pozostałych.
ABS_TXT - konwersja pliku ABS do pliku *.TXT o formacie ASCII.
Program umożliwia przeglądanie i wykorzystywanie poza VSD pliku tekstowego z rysunkiem zarejestrowanym w postaci ciągów punktów opisujących poligony.
TXT_ABS - konwersja pliku *.TXT o zawartości jw. na plik danych dla VSD w formacie ABS.
Program umożliwia konwersję odwrotną do konwersji realizowanej przez program ABS_TXT i w przypadku potrzeby modyfikacji danych wymaga znajomości formatu używanego w plikach typu *.TXT.
DXF_B_T - konwersja pliku binarnego DXF na format tekstowy.
Program dostosowuje format binarnego pliku DXF do tekstowego formatu DXF akceptowanego przez program DXF_ABS.
DXF_T_B - konwersja pliku tekstowego DXF na format binarny.
Program umożliwia tworzenie pliku DXF w formacie binarnym, zmniejszającym jego rozmiar ok. dwukrotnie. (Nb. użycie kompresji typu ZIP zmniejsza rozmiar pliku DXF ok. pięciokrotnie).
RGB_VSD - konwersja pliku TIFF z obrazem RGB (True Color) na plik indeksowany lub na plik monochromatyczny.
Program umożliwia przekształcenie pliku TIFF z obrazem cyfrowym typu RGB, niekompresowanym, na pliki obrazowe, które mogą być wprowadzone do VSD. Zależnie od decyzji operatora, w wyniku konwersji powstaje plik barwny indeksowany 256-kolorową paletą lub plik monochromatyczny.
KEY_CODE - egzaminator kodów przycisków klawiatury.
Program raportuje na ekranie kody klawiszy alfanumerycznych, znakowych, funkcyjnych i klawiszy naciskanych wraz z Alt i Ctrl, kody stosowane przez VSD. Umożliwia on zmianę przypisania funkcji VSD przyciskom myszy oraz programowanie menu graficznego w pliku konfiguracyjnym VSDCONF.
TIF_LST - wyświetlenie zawartości nagłówka pliku rastrowego w formacie TIFF, w razie potrzeby.
2. PARAMETRY PROJEKTU, ZDJĘĆ W POSTACI CYFROWEJ, DANYCH INICJALNYCH.
Parametry projektu i zdjęć:
Nazwa projektu: 46_47_KS
Zdjęcia wykonane w 1995 roku na terenie miasta Olsztyna
Skala zdjęcia: MZ = 5000
Szereg: 8
Numery zdjęć: 2946, 2947.
Rozdzielczość: 22,5 μm.
Format zdjęć: 23 x 23 cm
Stała kamery: ck = 305.335 mm
Dane inicjalne:
Plik 46_47_KS.pkt
1308 -5959105.422 7464509.060 134.777
1408 -5959899.227 7464514.483 140.237
4504 -5959817.439 7466161.296 157.679
8452 -5959828.943 7465139.012 134.828
4604 -5959053.879 7466213.389 138.551
8461 -5959329.015 7464710.360 137.861
Plik Znaczki_46_47_KS.pkt
1 112.029 0.003
2 -111.991 0.009
3 0.016 -112.003
4 0.009 112.021
5 110.017 -110.004
6 -109.992 110.016
7 -109.992 -109.989
8 110.018 110.006
3. ORIENTACJA PARY ZDJĘĆ LOTNICZYCH
Orientacja wewnętrzna
Orientacja wewnętrzna obrazu cyfrowego polega na wyznaczeniu ośmiu parametrów transformacji biliniowej ai , bi. Pierwszym krokiem jest pomiar współrzędnych pikselowych ośmiu znaczków tłowych, które są przetransformowane z układu pikselowego na układ tłowy. Współrzędne tłowe znane są z metryki kalibracji kamery, współrzędne pikselowe otrzymamy natomiast z pomiaru tych znaczków na ekranie monitora. Następuje tutaj analiza wielkości mx, my oraz mp. Błędy wpasowania x-xi, y-yi nie powinny przekroczyć 0,01 mm. Wyniki orientacji wewnętrznej zapisane są w pliku _OR_INT.WYN
Plik wynikowy: _OR_INT.WYN
Nazwa zadania : 46_47_KS 16-04-2014, 15:04
Nazwa obrazu : D:\FIT_GI~1\GR1\2946BW~1.TIF (11236*11174)
D:\FIT_GI~1\GR1\2947BW~1.TIF (11236*11174)
************************ Znaczki tlowe, zdjecie LEWE ************************
Transformacja wstepna, HELMERTA
nr xs ys xi yi x-xi y-yi xs-xs' ys-ys'
1 11090.33 -5637.00 112.0290 0.0030 -0.010 -0.000 -0.46 -0.02
2 429.00 -5627.67 -111.9910 0.0090 0.000 0.001 0.01 0.07
3 5755.33-10963.33 0.0160 -112.0030 0.001 -0.003 0.07 -0.12
4 5764.33 -301.33 0.0090 112.0210 0.009 -0.002 0.43 -0.12
5 10990.33-10872.67 110.0170 -110.0040 -0.006 -0.004 -0.30 -0.19
6 528.67 -392.00 -109.9920 110.0160 0.003 0.005 0.13 0.24
7 520.00-10863.33 -109.9920 -109.9890 0.006 -0.008 0.27 -0.38
8 10999.33 -401.00 110.0180 110.0060 -0.003 0.011 -0.15 0.52
mx= 0.007 my= 0.006 mp= 0.009 mxs= 0.319 mys= 0.300 mps= 0.438
Wspolczynniki wzoru transformacji :
-121.1041673370 0.0210114421 -0.0000176690
118.2481766227 0.0000176690 0.0210114421
Transformacja docelowa, BI-LINIOWA
nr xs ys xi yi x-xi y-yi xs-xs' ys-ys'
1 11090.33 -5637.00 112.0290 0.0030 -0.005 -0.002 -0.24 -0.08
2 429.00 -5627.67 -111.9910 0.0090 -0.005 0.003 -0.22 0.13
3 5755.33-10963.33 0.0160 -112.0030 0.003 0.002 0.13 0.10
4 5764.33 -301.33 0.0090 112.0210 0.008 -0.007 0.37 -0.34
5 10990.33-10872.67 110.0170 -110.0040 0.001 -0.000 0.05 -0.01
6 528.67 -392.00 -109.9920 110.0160 -0.002 0.002 -0.08 0.11
7 520.00-10863.33 -109.9920 -109.9890 0.001 -0.002 0.04 -0.12
8 10999.33 -401.00 110.0180 110.0060 -0.001 0.004 -0.07 0.21
mx= 0.005 my= 0.005 mp= 0.007 mxs= 0.261 mys= 0.235 mps= 0.351
Wspolczynniki wzoru transformacji : 3
-121.1089006 0.0210120 -0.0000176 -0.0000000
118.2452555 0.0000173 0.0210107 -0.0000000
Rozmiar piksela w ukladzie tlowym : 0.0210
************************ Znaczki tlowe, zdjecie PRAWE ***********************
Transformacja wstepna, HELMERTA
nr xs ys xi yi x-xi y-yi xs-xs' ys-ys'
1 11081.33 -5628.67 112.0290 0.0030 -0.011 -0.005 -0.52 -0.23
2 420.33 -5629.33 -111.9910 0.0090 0.008 0.004 0.40 0.20
3 5751.33-10960.00 0.0160 -112.0030 -0.002 -0.002 -0.11 -0.11
4 5750.00 -298.00 0.0090 112.0210 0.006 -0.004 0.27 -0.21
5 10986.67-10864.00 110.0170 -110.0040 -0.002 0.002 -0.10 0.07
6 514.33 -394.00 -109.9920 110.0160 -0.001 -0.002 -0.07 -0.11
7 515.67-10865.00 -109.9920 -109.9890 -0.002 -0.006 -0.09 -0.29
8 10985.67 -392.33 110.0180 110.0060 0.004 0.014 0.21 0.68
mx= 0.006 my= 0.007 mp= 0.010 mxs= 0.309 mys= 0.343 mps= 0.462
Wspolczynniki wzoru transformacji :
-120.7990797377 0.0210112381 0.0000027177
118.2935129138 -0.0000027177 0.0210112381
Transformacja docelowa, BI-LINIOWA
nr xs ys xi yi x-xi y-yi xs-xs' ys-ys'
1 11081.33 -5628.67 112.0290 0.0030 -0.008 -0.007 -0.40 -0.35
2 420.33 -5629.33 -111.9910 0.0090 0.006 0.007 0.28 0.31
3 5751.33-10960.00 0.0160 -112.0030 0.000 0.000 0.01 0.00
4 5750.00 -298.00 0.0090 112.0210 0.003 -0.007 0.15 -0.33
5 10986.67-10864.00 110.0170 -110.0040 0.004 0.004 0.20 0.17
6 514.33 -394.00 -109.9920 110.0160 -0.005 0.000 -0.22 0.00
7 515.67-10865.00 -109.9920 -109.9890 -0.003 -0.003 -0.15 -0.16
8 10985.67 -392.33 110.0180 110.0060 0.003 0.007 0.13 0.34
mx= 0.007 my= 0.007 mp= 0.010 mxs= 0.314 mys= 0.355 mps= 0.474
Wspolczynniki wzoru transformacji : 3
-120.8025207 0.0210114 0.0000026 -0.0000000
118.2963784 -0.0000037 0.0210113 -0.0000000
Rozmiar piksela w ukladzie tlowym : 0.0210
Orientacja wzajemna
Orientacja wzajemna polega na doprowadzeniu zdjęć do takiego położenia względem siebie, aby model terenu obserwowany przez obserwatora był jak najbardziej zbliżony do rzeczywistego.
Orientacja jest wykonywana dla zaleznej pary zdjęć. Przyjęliśmy, że zdjęcie lewe jest pionowe. Baza fotografowania jest wektorem zorientowanym przestrzennie. Geometrycznie orientację wzajemną należy rozumieć jako doprowadzenie do przecięcia wszystkich par promieni jednoimiennych obu wiązek (usunięcie paralaksy poprzecznej z modelu).
Pierwszym etapem jest pomiar współrzędnych pikselowych 15 punktów homologicznych w obszarze podwójnego pokrycia, w tym 6 w strefie Grubera.Przy pomocy parametrów transformacji biliniowej, wyznaczonych w orientacji wewnętrznej, przeliczamy pomierzone współrzędne na współrzędne tłowe. Następnie w oparciu o współrzędne tłowe lewego i prawego zdjęcia układamy 15 równań paralaksy poprzecznej Vpy.
Wyznaczamy 5 następujących elementów orientacji wzajemnej:
κ ” - kąt skręcenia prawego zdjęcia,
φ” - kąt nachylenia podłużnego prawego zdjęcia,
ω” - kąt nachylenia poprzecznego prawego zdjęcia,
bz, by - składowe bazy fotografowania,
Następnie dokonujemy transformacji DLT (bezpośrednia transformacja liniowa), która pozwala zorientować zdjęcia tak by była możliwa obserwacja stereoskopowa. W układzie modelu mamy znane elementy orientacji wzajemnej dzięki czemu jest możliwość przeliczenia współrzędnych punktów w układzie modelu. Otrzymujemy współrzędne xm, ym, zm modelu dla 15 punktów. Miarą poprawności przeprowadzonej orientacji wzajemnej jest wartość szczątkowej paralaksy poprzecznej dym, który nie powinien przekroczyć 0,01 mm.
Plik wynikowy: _OR_REL.WYN
Nazwa zadania : 46_47_KS 16-04-2014, 15:26
Nazwa obrazu : D:\FIT_GI~1\GR1\2946BW~1.TIF (11236*11174)
D:\FIT_GI~1\GR1\2947BW~1.TIF (11236*11174)
***************** Obliczenie elementow orientacji wzajemnej ******************
Liczba pomierzonych punktow : 15
x0= 0.00 y0= 0.00 ck= 305.34
Liczba iteracji : 5
om= 0.9880ř fi= 0.5586ř ka= -0.8781ř
bx= 89.2217 by= 0.2101 bz= 1.3906 |b|= 89.2328
Macierz obrotu prawego zdjecia :
0.9998350520 0.0153242766 0.0097486112
-0.0151546552 0.9997364946 -0.0172417433
-0.0100102596 0.0170911624 0.9998038242
nr xm ym zm dym dyt dys
1 -10.658 0.644 10.521 0.0088 0.0091 0.43
2 97.039 0.813 11.534 0.0035 0.0036 0.17
3 -11.813 94.767 11.893 0.0030 0.0034 0.16
4 89.656 99.047 11.895 -0.0014 -0.0016 -0.08
5 -6.984 -98.682 10.617 0.0058 0.0067 0.32
6 99.329 -97.493 11.857 0.0036 0.0041 0.20
7 -11.194 56.742 9.781 -0.0074 -0.0078 -0.37
8 89.636 59.435 11.080 0.0010 0.0010 0.05
9 -12.980 -39.729 10.764 -0.0046 -0.0049 -0.23
10 96.855 -49.567 11.917 -0.0028 -0.0030 -0.14
11 36.851 100.105 11.713 -0.0018 -0.0021 -0.10
12 35.122 56.501 11.789 0.0037 0.0040 0.19
13 44.350 -2.162 10.399 0.0007 0.0007 0.03
14 44.573 -34.290 10.763 -0.0050 -0.0052 -0.25
15 31.728 -90.627 11.369 -0.0071 -0.0081 -0.39
Szczatkowa paralaksa poprzeczna w ukladzie modelu/tlowym/obrazu :
my= 0.0057 myt= 0.0062 mys= 0.29
Rozmiar piksela w ukladzie tlowym : 0.0210
Wyniki pomiarow uzytych do powyzszych obliczen :
nr xsl ysl xsp ysp
1 5233.67 -5600.67 1010.67 -5931.00
2 10558.50 -5596.50 6280.00 -5842.00
3 5178.00 -939.00 887.50 -1332.50
4 10203.00 -731.00 5842.00 -1032.50
5 5410.50 -10498.50 1236.50 -10817.00
6 10673.00 -10464.50 6471.50 -10715.50
7 5211.00 -2842.00 970.50 -3203.50
8 10188.00 -2701.00 5871.00 -2975.50
9 5117.00 -7592.00 912.25 -7914.00
10 10553.50 -8091.50 6311.00 -8334.00
11 7587.00 -679.50 3259.50 -1032.00
12 7500.00 -2837.00 3200.50 -3158.00
13 7944.00 -5741.00 3699.50 -6027.50
14 7956.33 -7326.00 3728.00 -7606.67
15 7323.50 -10114.00 3126.00 -10407.00
Orientacja bezwzględna
Podczas orientacji bezwzględnej dokonaliśmy pomiaru w układzie modelu xm, ym, zm współrzędnych czterech fotopunktów. Przy pomocy 12 równań poprawek Vx,Vy,Vz możemy wyznaczyć siedem parametrów konforemnej przestrzennej transformacji przez podobieństwo:
K - kąt skręcenia modelu,
Φ - kąt nachylenia podłużnego modelu,
Ω - kąt nachylenia poprzecznego modelu,
k - współczynnik zmiany skali,
X0, Y0, Z0 - współrzędne wektora translacji,
Podczas transformacji obliczane są współrzędne bieguna w obu układach (średnie arytmetyczne współrzędnych punktów dostosowania), współczynnik skali pomiędzy układami oraz trzy kąty określające obroty jednego układu względem drugiego. Dodatkowo, program podaje odchyłki po transformacji pomiędzy punktami przetransformowanymi a wejściowymi zarówno dla układu modelu jak i terenowego (jeśli liczba punktów dostosowania przekracza 3). Z odchyłek w układzie terenowym liczone są średniokwadratowe błędy wpasowania punktów w układ terenowy (Err_ter) jednego zbioru punktów w drugi. Błędy mX, mY uznaje się za dopuszczalne, jeżeli nie przekraczają wielkości ± 30 cm. Błąd wysokości Z nie powinien przekraczać wielkości równej iloczynowi maksymalnej dopuszczalnej terenowej wielkości błędu mX, (mY) i współczynnika stosunku bazowego.
Plik wynikowy: _OR_ABS.WYN
Nazwa zadania : 46_47_KS 24-04-2014, 12:31
Nazwa obrazu : D:\FIT_GI~1\GR1\2946BW~1.TIF (11236*11174)
D:\FIT_GI~1\GR1\2947BW~1.TIF (11236*11174)
**************** Obliczenie elementow orientacji bezwzglednej ****************
Liczba wskazanych punktow : 6
OM= 0.2547ř FI= 0.9522ř KA= -1.3585ř
Skala : 8.2837
Biegun modelu : 46.8839 -17.3622 11.3316
Biegun terenu :-5959505.6667 7465208.0000 140.6555
Srodek rzutow zdjecia lewego :-5959849.9931 7465350.1335 2582.7924
Srodek rzutow zdjecia prawego :-5959110.9884 7465334.3545 2581.9608
Macierz obrotu :
0.9995808754 0.0237049016 0.0166177949
-0.0236340786 0.9997107925 -0.0044454153
-0.0167183670 0.0040508059 0.9998520326 1.00000
1308
Pnt_mod 97.185 -100.553 11.816
Pnt_mod' 97.178 -100.579 11.800
Err_mod -0.0072 -0.0254 -0.0163
Pnt_ter -5959105.500 7464509.000 134.777
Pnt_ter' -5959105.433 7464509.208 134.912
Err_ter 0.0670 0.2083 0.1346
1408
Pnt_mod 1.364 -102.198 10.853
Pnt_mod' 1.400 -102.183 10.864
Err_mod 0.0360 0.0147 0.0113
Pnt_ter -5959899.000 7464514.500 140.237
Pnt_ter' -5959899.303 7464514.386 140.148
Err_ter -0.3028 -0.1142 -0.0893
4504
Pnt_mod 6.493 96.812 12.252
Pnt_mod' 6.500 96.827 12.249
Err_mod 0.0077 0.0142 -0.0031
Pnt_ter -5959817.500 7466161.500 157.679
Pnt_ter' -5959817.566 7466161.384 157.705
Err_ter -0.0664 -0.1163 0.0261
4604
Pnt_mod 98.527 105.274 11.438
Pnt_mod' 98.522 105.278 11.444
Err_mod -0.0055 0.0037 0.0063
Pnt_ter -5959054.000 7466213.500 138.551
Pnt_ter' -5959053.956 7466213.469 138.498
Err_ter 0.0438 -0.0313 -0.0534
8452
Pnt_mod 8.091 -26.595 10.030
Pnt_mod' 8.076 -26.618 10.017
Err_mod -0.0146 -0.0221 -0.0137
Pnt_ter -5959829.000 7465139.000 134.828
Pnt_ter' -5959828.873 7465139.180 134.940
Err_ter 0.1274 0.1799 0.1123
8461
Pnt_mod 69.644 -76.914 11.600
Pnt_mod' 69.627 -76.899 11.616
Err_mod -0.0164 0.0149 0.0154
Pnt_ter -5959329.000 7464710.500 137.861
Pnt_ter' -5959328.869 7464710.374 137.731
Err_ter 0.1310 -0.1264 -0.1303
Bledy srednie wspolrzednych x,y,z : 0.1505 0.1410 0.0993
Blad sredniokwadratowy punktu w ukladzie odniesienia : 0.2289
Wyniki pomiarow wykonanych dla powyzszych obliczen :
Nr xsl ysl xsp ysp
1308 10566.00 -10615.00 6367.50 -10869.00
1408 5822.00 -10676.00 1644.50 -10990.50
4504 6085.00 -832.00 1773.50 -1211.50
4604 10635.00 -431.00 6271.50 -729.00
8452 6156.00 -6942.00 1946.00 -7250.00
8461 9201.00 -9440.50 4986.50 -9706.00
zbiorcze zestawienie wyników pomiarów i obliczeń
Plik wynikowy: 46_47_KS.OR
Nazwa zadania : 46_47_KS 29-05-2014, 12:34
Nazwa obrazu : D:\FIT_GI~1\GR1\2946BW~1.TIF (11236*11174)
D:\FIT_GI~1\GR1\2947BW~1.TIF (11236*11174)
Znaczki tlowe, zdjecie lewe
1 112.0290 0.0030 11090.33 -5637.00
2 -111.9910 0.0090 429.00 -5627.67
3 0.0160 -112.0030 5755.33 -10963.33
4 0.0090 112.0210 5764.33 -301.33
5 110.0170 -110.0040 10990.33 -10872.67
6 -109.9920 110.0160 528.67 -392.00
7 -109.9920 -109.9890 520.00 -10863.33
8 110.0180 110.0060 10999.33 -401.00
Znaczki tlowe, zdjecie prawe
1 112.0290 0.0030 11081.33 -5628.67
2 -111.9910 0.0090 420.33 -5629.33
3 0.0160 -112.0030 5751.33 -10960.00
4 0.0090 112.0210 5750.00 -298.00
5 110.0170 -110.0040 10986.67 -10864.00
6 -109.9920 110.0160 514.33 -394.00
7 -109.9920 -109.9890 515.67 -10865.00
8 110.0180 110.0060 10985.67 -392.33
Punkty orientacji wzajemnej w ukladzie obrazu
1 5233.67 -5600.67 1010.67 -5931.00
2 10558.50 -5596.50 6280.00 -5842.00
3 5178.00 -939.00 887.50 -1332.50
4 10203.00 -731.00 5842.00 -1032.50
5 5410.50 -10498.50 1236.50 -10817.00
6 10673.00 -10464.50 6471.50 -10715.50
7 5211.00 -2842.00 970.50 -3203.50
8 10188.00 -2701.00 5871.00 -2975.50
9 5117.00 -7592.00 912.25 -7914.00
10 10553.50 -8091.50 6311.00 -8334.00
11 7587.00 -679.50 3259.50 -1032.00
12 7500.00 -2837.00 3200.50 -3158.00
13 7944.00 -5741.00 3699.50 -6027.50
14 7956.33 -7326.00 3728.00 -7606.67
15 7323.50 -10114.00 3126.00 -10407.00
Wspolrzedne tlowe punktow orientacji wzajemnej
1 -11.039 0.663 -99.582 -6.325
2 100.848 0.843 11.136 -4.471
3 -12.292 98.606 -102.158 90.296
4 93.290 103.063 1.944 96.581
5 -7.235 -102.240 -94.849 -108.986
6 103.343 -101.434 15.149 -106.868
7 -11.564 58.623 -100.419 50.984
8 93.011 61.672 2.549 55.757
9 -13.455 -41.178 -101.655 -47.990
10 100.789 -51.578 11.782 -56.830
11 38.322 104.100 -52.318 96.601
12 36.532 58.768 -53.563 51.932
13 45.914 -2.239 -43.085 -8.361
14 46.202 -35.540 -42.490 -41.541
15 32.955 -94.128 -55.146 -100.377
Wspolrzedne terenowe punktow orientacji wzajemnej
1-5959978.704 7465368.386 142.511
2-5959086.779 7465348.676 135.995
3-5959969.593 7466148.029 157.202
4-5959128.574 7466163.627 143.309
5-5959967.769 7464545.118 139.456
6-5959087.071 7464534.120 135.062
7-5959972.224 7465833.125 138.334
8-5959136.630 7465835.614 135.223
9-5960005.823 7465034.529 143.494
10-5959098.141 7464931.511 137.501
11-5959565.618 7466182.736 149.147
12-5959588.492 7465821.956 148.549
13-5959523.788 7465334.405 133.794
14-5959528.201 7465068.307 135.697
15-5959645.544 7464604.262 140.612
Punkty dostosowania w ukladzie odniesienia
1308-5959105.500 7464509.000 134.777
1408-5959899.000 7464514.500 140.237
4504-5959817.500 7466161.500 157.679
4604-5959054.000 7466213.500 138.551
8452-5959829.000 7465139.000 134.828
8461-5959329.000 7464710.500 137.861
Punkty dostosowania w ukladzie obrazu
1308 10566.00 -10615.00 6367.50 -10869.00
1408 5822.00 -10676.00 1644.50 -10990.50
4504 6085.00 -832.00 1773.50 -1211.50
4604 10635.00 -431.00 6271.50 -729.00
8452 6156.00 -6942.00 1946.00 -7250.00
8461 9201.00 -9440.50 4986.50 -9706.00
Wspolrzedne w ukladzie obrazu
1 8342.00 -4834.00 4086.00 -5120.00
2 8346.00 -5004.00 4092.00 -5290.00
3 8350.00 -5176.00 4098.00 -5458.00
4 8354.00 -5346.00 4104.00 -5628.00
5 8358.00 -5516.00 4110.00 -5798.00
6 8364.00 -5686.00 4120.00 -5966.00
7 8368.00 -5858.00 4126.00 -6136.00
8 8372.00 -6028.00 4132.00 -6306.00
9 8374.00 -6198.00 4140.00 -6476.00
10 8380.00 -6370.00 4148.00 -6648.00
11 11180.00 -8842.00 6928.00 -9078.00
12 11010.00 -8846.00 6758.00 -9084.00
13 10838.00 -8850.00 6588.00 -9090.00
14 10668.00 -8852.00 6416.00 -9096.00
15 10496.00 -8854.00 6246.00 -9100.00
16 10326.00 -8858.00 6078.00 -9106.00
17 10158.00 -8860.00 5910.00 -9110.00
18 9986.00 -8862.00 5740.00 -9114.00
19 9816.00 -8866.00 5570.00 -9120.00
20 9646.00 -8868.00 5402.00 -9124.00
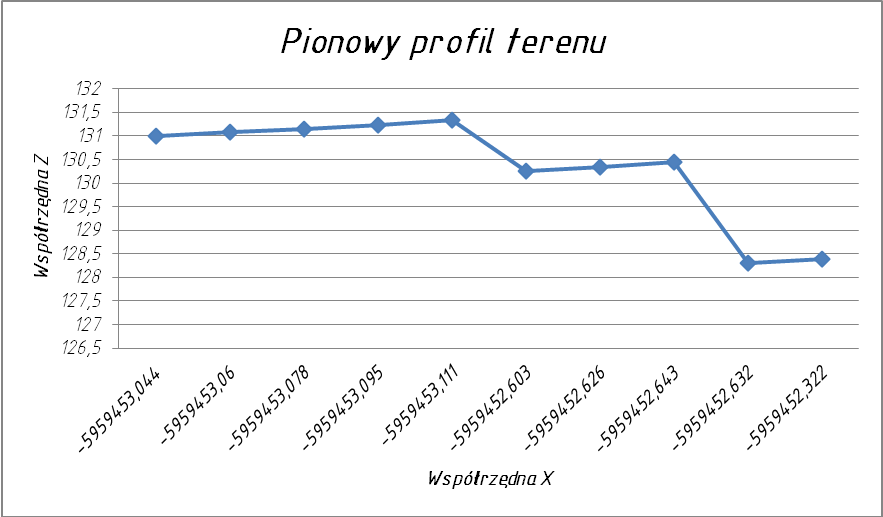
Wspolrzedne terenowe
1-5959453.044 7465485.445 131.001
2-5959453.060 7465456.789 131.089
3-5959453.078 7465427.902 131.152
4-5959453.095 7465399.260 131.241
5-5959453.111 7465370.625 131.331
6-5959452.603 7465342.032 130.263
7-5959452.626 7465313.108 130.350
8-5959452.643 7465284.480 130.442
9-5959452.632 7465255.778 128.295
10-5959452.322 7465226.793 128.391
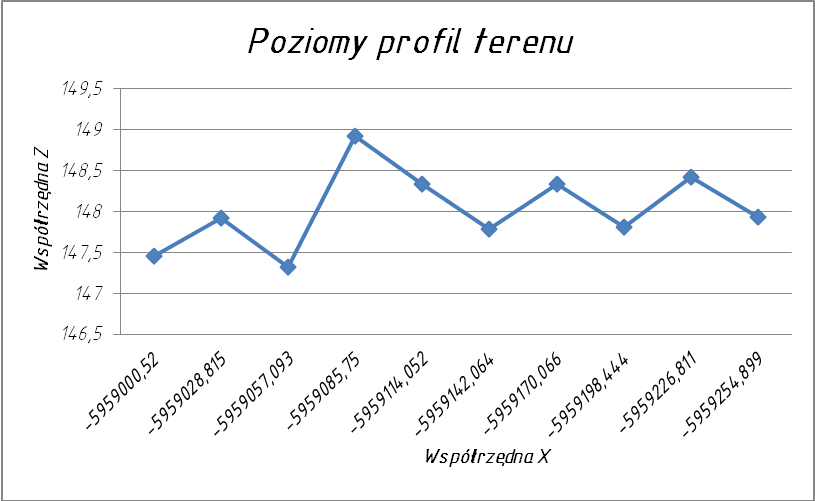
11-5959000.520 7464806.358 147.461
12-5959028.815 7464806.346 147.926
13-5959057.093 7464806.101 147.321
14-5959085.750 7464806.627 148.919
15-5959114.052 7464806.720 148.338
16-5959142.064 7464806.481 147.788
17-5959170.066 7464806.812 148.332
18-5959198.444 7464806.919 147.812
19-5959226.811 7464806.939 148.420
20-5959254.899 7464807.046 147.934
4. DEFINICJA I OPIS METODY STEREODIGITALIZACJI OBIEKTOWEJ 3D
Stereodigitalizacja to proces pozyskiwania trójwymiarowych danych geometrycznych o obiektach znajdujących się a powierzchni terenu. Ogólnie polega na interpretacji i stereoskopowym pomiarze punktów charakterystycznych dla danego obiektu w zewnętrznym układzie odniesienia rekonstrukcji modelu przestrzennego.
Stereodigitalizacja 3D w systemie VSD polega na pomiarze szczegółów sytuacyjnych i wysokościowych na zorientowanym modelu w trybie obserwacji stereoskopowej z jednoczesnym zapisem rekordów zawierających dane numeryczne: numer punktu, nazwa warstwy tematycznej, współrzędne X,Y,Z oraz rodzaj punktu.
Wyróżniamy dwie techniki :
pomiar statyczny - ręczny pomiar przy wykorzystaniu myszy 3D (znaczek pomiarowy prowadzony jest na dany punkt-„dotyka” mierzonego elementu)
pomiar dynamiczny - znaczek pomiarowy prowadzony jest wzdłuż jakiegoś wektora lub trajektorii (np.: wzdłuż krawężnika lub drogi) podczas takiego pomiaru może nastąpić zmiana interwałów czasowych i liniowych.
Warstwy tematyczne:
Nr |
Nazwa |
Kolor |
Stan |
Odcinki |
1 |
BUDYNKI |
R |
Widoczna |
28 |
2 |
UŻYTKI |
G |
Widoczna |
32 |
3 |
DROGI |
B |
Widoczna |
124 |
5. EDYCJA FRAGMENTU NUMERYCZNEJ MAPY WEKTOROWEJ OBIEKTU
W systemie VSD wektoryzację obrazów cyfrowych (rastrowych) obsługują następujące funkcje:
- realizacja linii łamanej: [P],[P],[P]......[K].
- realizacja trajektorii (rejestracja śladu kursora przemieszczanego myszą): [T] ~ [K].
- usuwanie błędnego wektora: [U] lub fragmentu linii łamanej / trajektorii: [T] [U].
- pomiar pojedynczych punktów: [J]
- usuwanie błędnego punktu: [J] oraz <numer punktu ze znakiem - (minus)>
- wybór warstwy tematycznej [B] Istnieją 4 procedury wspomagające wektoryzację:
- półautomatyczna autokorelacja (wyszukiwanie punktów homologicznych): [F9] ,
- automatyczne doczepianie wektora do pomierzonych przez [J] punktów lub
wierzchołków linii łamanej: [D]
- automatyczne doczepianie wektora do wewnetrznego punktu dowolnego odcinka: [.]
- automatyczna realizacja wektora prostopadłego do wskazanego odcinka:
- prostopadłość przestrzenna odcinków: [N]
- prostopadłość odcinków w rzucie na płaszczyznę poziomą: [Alt N]
Import mapy 3D (z plików zapisanych w katalogu roboczym):
wizualizacja na stereogramie mapy 3D: [E] + nazwa pliku 3D: *.ABS lub *.MAP
Import mapy 2D (z plików zapisanych w katalogu roboczym):
- wizualizacja na stereogramie istniejącej mapy 2D: [Ctrl E] + nazwa pliku 2D: *.ABS
(wszystkie punkty tej mapy otrzymują współrzędną Z równą współrzędnej Z wskazywanej
aktualnie przez kursor)
- zmiana wysokości płaszczyzny mapy 2D: [Ctrl D] (wysokość płaszczyzny mapy zmienia
się zgodnie z aktualną wysokością kursora).
Usuwanie rysunku wektorowego ze stereogramu:
- skasowanie rysunku wektorowego: [E] + [SPACE] (usunięcie to powoduje utratę zmian
powstałych od chwili zaimportowania pliku mapy )
- wygaszenie / wyświetlenie rysunku mapy: [Alt E]
- wygaszanie / wyświetlanie oznaczeń punktów pomiarowych: [ * ]
- wyświetlenie numerów punktów: [Alt *] (nie dotyczy klawiatury numerycznej)

Wyplot kartowania cyfrowego:
6. OPIS METODY MANUALNEGO STEREOAUTOGRAMETRYCZNEGO POMIARU ZDEFINIOWANEGO PROFILU POZIOMEGO/PIONOWEGO
Numeryczny Model Terenu (NMT) jest numeryczną, punktową reprezentacją wysokości topograficznej powierzchni terenu, wraz z algorytmem interpolacyjnym umożliwiającym odtworzenie jej kształtu w określonym obszarze. Numeryczne modele terenu służą do rozwiązania zadania polegającego na określeniu trzeciej współrzędnej punktu (wysokości), którego współrzędne płaskie są znane. Służą także do automatycznej interpolacji warstwic, obliczania spadków terenu i określania jego ekspozycji, obliczeń inżynierskich, obliczania przekrojów przez teren, wizualizacji terenu i wielu innych.
Pomiar NMT w systemie VSD polegał na pokryciu wybranego obszaru siatką pikiet wysokościowych złożoną z rzędów i kolumn o określonej liczbie tych pikiet odległych od siebie o stałą określoną odległość. Skok kursora ustawiony był na 100 pikseli, zarówno w szeregu jak i w kolumnie. Pikiety zapisywane były przy pomocy klawisza [J]. Zarówno w profilu pionowym jak i poziomym pomierzone zostało 10 pikiet: w profil pionowym numerowane od 1 do 10, poziomym: 11-20. Dla pomierzonych pikiet otrzymano ich współrzędne terenowe zapisane w pliku 46_47_KS.OR.
Wyszukiwarka
Podobne podstrony:
MOJE 10 PEL
Saubin B Próba nadziei Moje 10 lat w malezyjskiej celi śmierci
Moje 10 płyt lat osiemdziesiątych
Str.10 - Operacja 50, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, te
cw 8 moje, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, płytkas V, Szkoł
elektra sem 7, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, płytkas V, S
TISP 10, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od majka, SPRAW
10 epitafium dla Kota, 2 moje teksty
ćwiczenie nr 10 moje, BIOTECHNOLOGIA POLITECHNIKA ŁÓDZKA, CHEMIA FIZYCZNA
Praktyczna Nauka Języka Rosyjskiego Moje notatki (leksyka)10
Praktyczna Nauka Języka Rosyjskiego Moje notatki (gramatyka)10
MOJE zad 10, geo wyższa
MÓJ!!!10 Spis narzdzi, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, W
Politechnika Lubelska, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, płyt
Module control 1, Medycyna, Moje podreczniki, 1 rok, 10. Мед и био физика, Материалы кафедры. Шрифты
oswietlenie 6 pomiar naterzenia moje, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materi
Dok 6 2-1 konkur30 03 10, moje dokumenty, Nowy folder
więcej podobnych podstron