Imię i nazwisko .......................................................
Zestaw pytań testowych egzaminacyjnych z przedmiotu:
Systemy awioniczne
Zbiór składników powiązanych między sobą, umożliwiających osiągnięcie określonego celu to:
moduł
zespół
system
System awioniczny nie może mieć architektury:
rozproszonej
zamkniętej
zintegrowanej
W skład cyfrowych modułów awioniczny wchodzi:
sprzęt
oprogramowanie
sprzęt i oprogramowanie
Ze względu na formę wykorzystywanej informacji, komputery dzieli się na:
duże i małe
analogowe i cyfrowe
sprzętowe i programowe
Przez architekturę komputera cyfrowego rozumiemy:
wykaz podzespołów o wchodzących w skład komputera
opis komputera obejmujący wzajemne powiązania i współdziałanie jego poszczególnych bloków funkcjonalnych
strukturę komputera, która jest widzialna dla programisty działającego na poziomie oprogramowania podstawowego za pomocą języka asemblera
Długość słowa maszynowego, liczba rejestrów, liczba rozkazów, szybkość działania, struktura wewnętrzna to parametry:
pamięci
procesora
układów wejścia-wyjścia
Układy wejścia-wyjścia pośredniczą w:
wymianie informacji między urządzeniami zewnętrznymi a jednostką centralną
wymianie informacji między pamięcią programu i danych
wymianie informacji między procesorem i pamięcią
Mikroprocesor jest procesorem wykonany w postaci:
pojedynczego układu scalonego o małym stopniu scalenia
kilku układów scalonych połączonych ze sobą
pojedynczego mikroukładu o wielkim stopniu scalenia
System mikroprocesorowy składa się z:
układów mikroprocesorowych
mikroprocesora, pamięci i układów wejścia-wyjścia
układów otoczenia mikroprocesora
Mikrokontroler jest układem scalonym, który w swej strukturze zawiera:
jednostkę centralną
jednostkę centralną i pamięć
jednostkę centralną, pamięć oraz układy peryferyjne
Procesor sygnałowy jest specjalnym typem procesora przeznaczonym do:
wykonywania dużej ilości obliczeń
szybkiej reakcji na zdarzenia zewnętrzne
bardzo szybkiej obróbki sygnałów analogowych
16-to bitowa szyna adresowa umożliwia zaadresowanie pamięci o maksymalnej pojemności:
16 kilobajty
32 kilobajty
64 kilobajty
Pamięć, której zawartość zanika wraz z wyłączeniem napięcia zasilania to pamięć typu:
ROM
EPROM
RAM
Pamięć ROM to pamięć, z której:
można jedynie wpisywać do niej dane
można czytać, lecz nie można do niej wpisywać danych
można zarówno czytać jak i wpisywać do niej dane
Określenie „oprogramowanie” oznacza:
algorytm działania danego urządzenia
język służący do zapisu algorytmów
zapis algorytmu w danym języku programowania
Który rodzaj oprogramowania zdefiniowany w DO-178 charakteryzuje się poziomem najwyższym i ma największy wpływ na bezpieczeństwo:
oprogramowanie krytyczne
oprogramowanie istotne
oprogramowanie nieistotne
Oprogramowanie dla aplikacji lotniczych zaleca się tworzyć głównie w języku:
Pascal
Ada
C
Do przesyłania danych na małe odległości stosuje się interfejsy:
szeregowe
równoległe
szeregowo-równoległe
Transmisja szeregowa polega na przesyłaniu słów cyfrowych:
w całości
bajt po bajcie
bit po bicie
Interfejs IEC-625 zalicza się do interfejsów:
kasetowych
przyrządowych
sieci lokalnych
Który ze sposobów transmisji stosuje się w pokładowych magistralach komunikacyjnych:
szeregowy
równoległy
mieszany
Który z trybów transmisji szeregowej zastosowano w ARINC 429:
simpleks
półdupleks
dupleks
Określenie dupleks oznacza transmisję:
jednokierunkową
dwukierunkową, ale nie jednoczesną
jednoczesną i dwukierunkową
Które z mediów transmisyjnych stosuje się w magistrali ARINC 429:
kabel koncentryczny
skrętka
światłowód
Wymianę informacji w magistrali MIL-STD-1553B inicjuje:
terminal odległy
kontroler magistrali
monitor magistrali
Metoda nawigacji oparta na wyznaczaniu położenia za pomocą całkowania mierzonych przyspieszeń lub prędkości lotu obiektu to:
Metoda pozycyjna;
Metoda zliczania drogi;
Metoda wizualno-porównawcza.
Satelitarny system nawigacji GPS zalicza się do metod nawigacji:
pozycyjnych;
zliczania drogi;
wizualno-porównawczych.
Wykorzystywana w nawigacji powierzchnia, która przebiega wszędzie prostopadle do kierunku siły ciężkości z uwzględnieniem zmian tej siły wywołanych ukształtowaniem pionowym powierzchni ziemskiej nazywana jest:
Elipsoidą odniesienia;
Elipsoidą ziemską;
Geoidą.
Wykorzystywana w nawigacji jednostka zwana milą morską wynosi:
1852m;
1825m;
185,2m.
Miejsce na mapie o jednakowej wartości deklinacji magnetycznej połączone linią nosi nazwę:
izoklina;
izogona;
agona.
Kąt zawarty pomiędzy północnym zwrotem południka geograficznego i magnetycznego nazywa się:
Inklinacją;
Odchyleniem magnetycznym;
Dewiacją.
Prędkość obiektu względem powierzchni Ziemi nazywa się:
Prędkością powietrzną;
Prędkością podróżną;
Prędkością przyrządową.
Kąt zawarty między kierunkiem wektora prędkości powietrznej i linią drogi nazywa się:
Kątem natarcia;
Kątem ślizgu;
Kątem znoszenia.
Podstawowym odwzorowaniem stosowanym w nawigacji jest odwzorowanie równokątne walcowe normalne - jest to odwzorowanie:
Merkatora;
Gaussa;
Gnomiczne.
Który rodzaj dewiacji kompensuje się obrotem korpusu busoli:
Okrężną;
Półokrężną;
Ćwierćokrężną.
Do pomiaru kursu samolotu wykorzystuje się:
Giroskop pionowy;
Giroskop horyzontalny;
Giroskop precesyjny o dwóch stopniach swobody.
Busola giroindukcyjna wskazuje kurs:
Ortodromiczny;
Loksodromiczny;
Magnetyczny.
Wartości prędkości podróżnej i kąta znoszenia są podawane przez:
Automaty Areometryczne;
Automaty Dopplerowskie;
Systemy Inercjalne.
System nawigacji inercjalnej w którym blok giroskopów i przyspieszeniomierzy umieszczony na jednej platformie utrzymywanej w płaszczyźnie horyzontu miejscowego nazywa się:
Typem geometrycznym;
Typem półanalitycznym;
Typem analitycznym.
Modelowanie przestrzeni inercjalnej w oparciu o pomiary prędkości kątowej samolotu za pomocą giroskopów, sztywno związanych z konstrukcją samolotu jest realizowane w:
Kardanowych inercjalnych systemach nawigacji typu geometrycznego;
Bezkardanowych inercjalnych systemach nawigacji;
Kardanowych inercjalnych systemach nawigacji typu analitycznego.
Korelacyjno ekstremalnym systemem nawigacji bez pamięci może być:
Miernik prędkości podróżnej i kąta znoszenia obiektu;
Inercjalny system nawigacji;
Centrala danych areometrycznych.
Inercjalny system nawigacji IKW-8 montowany na samolocie Su-22 to system typu:
Geometrycznego;
Półanalitycznego;
Analitycznego.
Inercjalny system nawigacji IKW-8 posiada możliwość wprowadzania szerokości geograficznej lotniska startu w celu przeprowadzania:
Korekcji horyzontalnej;
Korekcji azymutalnej;
Korekcji siłowej.
Jeżeli we wstępnej orientacji ISN typu IKW-8 wprowadzimy do przyrządu KM-2 wartość deklinacji równą kątowi zawartemu między kierunkiem północnym a kierunkiem ortodromy to będziemy otrzymywać kurs:
Magnetyczny;
Geograficzny;
Ortodromiczny;
Platforma giroskopowa w ISN typu IKW-8 zawiera:
4 giroskopy i 3 przyspieszeniomierze;
3 giroskopy i 4 przyspieszeniomierze;
3 giroskopy i 3 przyspieszeniomierze.
Pierwszy samolot„Flyer” braci Wright był samolotem w układzie aerodynamicznym:
normalnym,
kaczka,
bezogonowym.
Zastępcza transmitancja układu G(s) przy ujemnym sprzężeniu zwrotnym wynosi:
Gz(s)=G(s)/(1+G(s)),
Gz(s)=G(s)/(1-G(s)),
Gz(s)=G2(s).
Transmitancja

opisuje człon:
oscylacyjny,
inercyjny,
całkujący.
Transmitancja
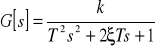
opisuje człon:
oscylacyjny,
inercyjny,
całkujący.
Bieguny transmitancji
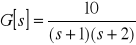
wynoszą:
p1=1, p2=2,
p1=10, p2=-1, p3=-2
p1=-1, p2=-2.
Ruch wokół środka masy w ruchu podłużnym SP nazywamy:
ruchem krótkookresowym,
ruchem fugiodalnym
holendrowaniem.
Ruch środka masy względem początkowej wysokości w ruchu podłużnym SP nazywamy:
ruchem krótkookresowym,
ruchem fugiodalnym
holendrowaniem.
Tłumik drgań krótkookresowych wykorzystuje jako źródło sygnału:
żyroskop swobodny,
żyroskop prędkościowy,
tachogenerator.
Klasyczny układ sterowania SP w kanale pochylenia, przechylenia i odchylenia to sterowanie:
momentowe,
aktywne,
fly-by-wire.
Sterowanie aktywne SP to sterowanie, w którym wykorzystuje się:
tylko wektorowanie ciągu zespołu napędowego,
aktywną reakcle pilota na zaistniałą sytuację w locie,
wektorowanie ciągu zespołu napędowego oraz siły na wszystkich płaszczyznach sterowych jednocześnie.
Zwrotny układ sterowania SP to układ, który zapewnia:
dużą zwrotność SP,
przeniesienie części sił z płaszczyzn sterowych na drążek sterowy,
kierowanie we wszystkich kanałach jednocześnie.
Układ fly-by-wire jest układem:
zwrotnym,
bezzwrotnym,
obojętnym.
Układy trymerowania SP zapewniają:
zmianę przełożenia na drążku sterowym SP,
stabilny lot w stanie ustalonym,
zmianę położenia środka masy SP.
Korektory SP zapewniają:
zmianę przełożenia na drążku sterowym SP,
stabilny lot w stanie ustalonym,
zmianę położenia środka masy SP.
Śmigło ogonowe śmigłowca:
wytwarza główny ciąg i powoduje ruch postępowy,
przeciwdziała rotacji śmigłowca oraz umożliwia zmianę kierunku lotu,
jedynie przeciwdziała rotacji śmigłowca.
Stateczność poprzeczną samolotu można zwiększyć poprzez:
zwiększenie wzniosy skrzydła,
zwiększenie powierzchni lotek,
zmniejszenie powierzchni bocznej kadłuba SP.
Ocenę własności pilotażowych SP można dokonać na podstawie:
tylko częstości drgań własnych SP,
tylko współczynnika tłumienia SP,
częstości drgań własnych SP i współczynnika tłumienia.
Regulator PD składa się z członów:
proporcjonalnego i całkującego,
różniczkującego i całkującego,
proporcjonalnego i różniczkującego.
Wyrównanie to faza lotu podczas lądowania SP, w której:
wyrównuje się prędkość liniową i prędkość powietrzną SP,
SP wyrównuje (zeruje) swoje pochylenie i przechylenie,
następuje zejście ze ścieżki schodzenia SP do lotu poziomego nad pasem startowym.
Do oceny jakości lotu SP najczęściej stosuje się następujące współczynniki:
masa, ciąg oraz powierzchnia skrzydeł SP,
częstość drgań fugoidalnych, współczynnik tłumienia tych drgań oraz przeciążenia.
częstość drgań krótkookresowych, współczynnik tłumienia tych drgań oraz przeciążenia.
Wyszukiwarka
Podobne podstrony:
Pytania testowe, studia pedagogiczne, Rok 4, Nowoczesne tendencje w dydaktyce
Egzamin końcowy-, poĹ‚oĹĽnictwo pytania testowe studia dzienne KOMISJA, Położnictwo i pielęgniarstwo
pytania testowe, studia pielęgniarstwo
PG przykladowe pytania testowe, Studia UMK FiR, Licencjat, I rok, Prawo gospodarcze J.Naworski
pytania testowe5, studia pielęgniarstwo
pytania testowe 1, studia pielęgniarstwo
Trybunał Konstytucyjny moja praca testowa, studia, Administracja I stopnia, I rok Administracji, Kon
pytania ksop(1), studia, Administracja I stopnia, I rok Administracji, Konstytucyjny system organów
wso pytania z egzamu (1), Studia WIT - Informatyka, SSR - Sieci i systemy rozproszone
podane sa stezenia Na, studia, 3 rok, Patofizjologia, pytania, pytania testowe
biochemia - pytania testowe z odpowiedziami, Kosmetologia - studia (Szczecin)
Egzaminacyjne pytania testowe z medycyny rodzinnej dla samokształcenia i samoocen2, Pomoce naukowe,
pytania z dietetyki cz.2, WNoŻ, Studia inżynierskie, VII semestr, Dietetyka
Odpowiedzi na pytania testowe na egzamin z Siekli, studia, naped elektryczny i energoelektronika, eg
Odpowiedzi na pytania testowena egzamin z Siekli, studia, naped elektryczny i energoelektronika, egz
pytania na egz z inzynieriiiiii, MATERIAŁY NA STUDIA, INŻYNIERIA PROCESOWA, INZYNIERIA PROCESOWA (wy
pytania testowe, Semestr IV, Inżynieria bioprocesowa
więcej podobnych podstron