Wymagania stawiane OSN:
1) automatyzacja:
a)praca ze zmniejszoną obsługą:
-automatyzacja czynności pomocniczych;
-automatyczny nadzór, diagnostyka stanu;
2) większa dokładność obrabiarek:
a) wzrost dokładności przedmiotów:
-nowe struktury kinematyczne;
-duża sztywność elementów i zespołów;
-bezpośredni pomiar przemieszczeń;
3) ergonomia i przyjazna obsługa:
a)grupowa organizacja pracy;
-programowanie przez nauczanie;
b)komputerowa integracja produkcji;
-współdziałanie z otoczeniem , swoboda rozbudowy;
4) ochrona środowiska, aspekty ekologiczne:
a)minimalizacja zanieczyszczeń środowiska;
-obróbka na sucho bez chłodziwa;
Napęd główny:
Rodzaje: układy napędowe prądu stałego i przemiennego: Silniki elektryczne serwonapędowe i krokowe (obrotowe, liniowe zintegrowane z nakrętką). Zintegrowane jednostki napędowe: przekładnie (pasowe zębate, zębate), przekładnie śrubowe toczne.
Klasyfikacja:
Elektryczne:
a) elektromechaniczne:
-silnik asynchroniczny ( mechaniczna przekładnia bezstopniowa, stopniowa skrzynka prędkości);
b) prądu stałego:
-regulator tyrystorowy zasilacz prądu stałego, komutatorowy silnik prądu stałego, przekładnia zwielokrotniająca;
c) prądu przemiennego:
-regulator prędkości układ prostowniczy falownik (silnik asynchroniczny, synchroniczny);
Napęd posuwowy:
-napędy tradycyjne, w których silnik o ruchu obrotowym bezpośrednio lub za pomocą przekładni (zębatej albo pasowej zębatej) napędza śrubę toczną;
-napędy z obracającą się nakrętką toczną i nieruchomą śrubą;
-napęd posuwu zębatkowy;
-napędy bezpośrednie z liniowym silnikiem elektrycznym;
Prowadnice:
a) prostoliniowe, b)obrotowe:
-ślizgowe: o styku bezpośrednim, z nakładkami stalowymi, z nakładkami z tworzywa, hydrostatyczne, aerostatyczne, magnetyczne;
-toczne: z otwartym obiegiem elementów tocznych, bloki prowadnicowe, szynowe zestawy prowadnicowe.
Korpusy: części obrabiarki łączące w jedną całość jej elementy.
Korpusy w obrabiarce (skład):
-k. główny, który jest nieruchomy i stanowi podstawową konstrukcję nośną obrabiarki. Nazwa: frezarka - korpus, tokarka -łoże, ława, wiertarka- stojak, słup.
-k. zespołów służących do ustalania i zamocowania przedmiotów obrabianych;
-k. zespołów napędowych (wrzecienniki);
Materiały: korpusy żeliwne, korpusy stalowe spawane, korpusy polimerobetonowe, korpusy kompozytowe,
Interpolator: generuje sygnały reprezentujące wartość zadaną przemieszczenia dla każdej osi osobno. Jest to procesor który zadawane niektóre punkty zarysu przez interpolację wyznacza dokładne zależności drogi od czasu. Rodzaje interpolacji: liniowa, kołowa, heliakalna, typu spline, wielomianowa.
Jaki kierunek przyjmujemy za dodatni w osiach SN: przyjmujemy taki kierunek aby ruch roboczy w kierunku ujemnego zwrotu przy podstawowych metodach obróbki powierzchni powodował ubytek materiału.
Podział sterowań numerycznych:
-ręczne, kiedy operator bezpośrednio kieruje pracą maszyny;
-automatyczne- bez pośredniego udziału operatora.
Sterowanie programowe- gdy wartość sygnału zadanego zmienia się zgodnie z założonym programem.
Schemat funkcjonalny a zapisie operatorowym osi liniowej SN z pomiarem bezpośrednim:
Model:
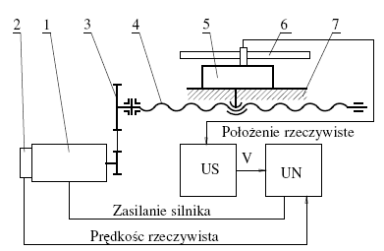
1 silnik serwonapędowy, 2 układ pomiaru prędkości silnika, 3 przekładnia pasowa zębata, 4 śruba kulowa, 5 stół obrabiarki, 6 liniał pomiarowy położenia, 7 prowadnice obrabiarki, US- układ sterowania, UN- układ napędowy.
Schemat blokowy:

Xzad- zadane położenie, ∆- uchyb położenia, V- zadana prędkość, M- moment zdany, n- prędkość obrotowa silnika, Vr- prędkość rzeczywista stołu, Xrzecz- położenie rzeczywiste stołu, kv- wzmocnienie położeniowe, kp- wzmocnienie prędkościowe, k- stała stołu, k- stała przekładni, Ts- stała czasowa silnika, T- stała czasowa stołu.
Schemat funkcjonalny a zapisie operatorowym osi obrotowej SN z pomiarem bezpośrednim:
Wyszukiwarka
Podobne podstrony:
odlewnictwo sciaga, Mechanika i budowa maszyn, sem 3, odlewnictwo i spawalnictwo
INSTRUKCJA BHP LABORATORIUM CNC, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mecha
MIN Tworzywa sztuczne (do egzaminu), Mechanika i Budowa Maszyn sem II, MIN, Sprawka
techniki - oleje sciaga, Mechanika i Budowa Maszyn PŚK, Techniki Samochodowe
E1, Mechanika i Budowa Maszyn sem II, Elektra
E4, Mechanika i Budowa Maszyn sem II, Elektra
Pytania01 AiR 2013, Mechanika i Budowa Maszyn sem II, automatyka
Stale stopowe konstrukcyjne, MECHANIKA I BUDOWA MASZYN SEM 1, PNOM zut
E3p, Mechanika i Budowa Maszyn sem II, Elektra
E2p, Mechanika i Budowa Maszyn sem II, Elektra
E7, Mechanika i Budowa Maszyn sem II, Elektra
ściąga na chemie [Jasiorski], Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Chemia materiałów
fiza sciaga, Studia, MECHANIKA I BUDOWA MASZYN, Fizyka
zaliczenie - ergonomia zal, Studia, Mechanika i budowa maszyn PP, Sem V, ERGO, ergo
ściąga z Fizy semI, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mechanika i Budowa
wykład 2, Mechanika i budowa maszyn, III semestr, Sem III od kogoś, terma skraw, terma
więcej podobnych podstron