Politechnika Śląska w Gliwicach
Napędy, sterowanie hydrauliczne i pneumatyczne.
Temat: „Projektowanie układów pneumatycznych i hydraulicznych”
Wydział: Mechaniczny Technologiczny
Kierunek: Automatyka i Robotyka
Grupa: AC3
1.WPROWADZENIE.
Ogólną procedurę projektowania hydraulicznych układów napędowych przedstawiono na rys1. Poszczególne jej elementy mogą być modyfikowane stopniem przygotowania i intuicją projektanta oraz ograniczeniami wynikającymi np. z możliwości nabycia poszczególnych elementów lub z obowiązujących przepisów dotyczących budowy i zasad bezpieczeństwa pracy określonych typów maszyn i urządzeń.
Analizę ruchów i obciążeń, która jest punktem wyjścia do obliczeń projektowych układu ułatwiają tzw. cyklogramy. Są to wykresy przedstawiające graficzne zależności drogi, prędkości i obciążeń elementów wykonawczych (siłowników lub silników) od czasu. W przypadku siłowników sporządza się je dla tłoka, z którym bezpośrednio jest związane obciążenie zewnętrzne.
Typowe przebiegi prędkości i obciążeń siłowników przedstawione są na rys.1.1 i rys.1.2.
a) b)
V
V
Vu Vs
t Vu
t
tr tu th tr ts tu
V
V
Pb
Pu
Pu Pb
∑T ∑T
Ph t t
Rys1.1 Typowe przebiegi prędkości i obciążeń siłowników.
a) podajnika, b) posuwowego.
Cykl roboczy w czacie t zawiera trzy fazy, rozruch, ruch ustalony, hamowanie.
W fazie rozruchu wystąpi maksymalne obciążenie, jakie przenosi siłownik:
PMAX = ∑ T + Pu +Pb
∑ T - opory własne siłownika
Pu - zewnętrzne obciążenie użyteczne
Pb - siła bezwładności tłoka
Rys1. Ogólna procedura projektowania układu hydraulicznego.
V c) V d)
Vs
Vs
t t
tr ts to tr ts tu
V V
Pb Pu
Pb Pb
t ∑T t ∑T
Rys.1.2 Typowe przebiegi prędkości i obciążeń siłowników.
c) mocującego, d) roboczego
W fazie ruchu ustalonego obciążenie siłownika jest sumą siły użytecznej oraz siły tarcia i wynosi:
P = ∑ T + Pu
W fazie hamowania (opóźniania ruchu ), tzn. przy zmniejszaniu prędkości od Vu do 0, na tłok musi oddziaływać siła Ph przeciwna do kierunku jego ruchu.
2.ZADANIE DO WYKONANIA.
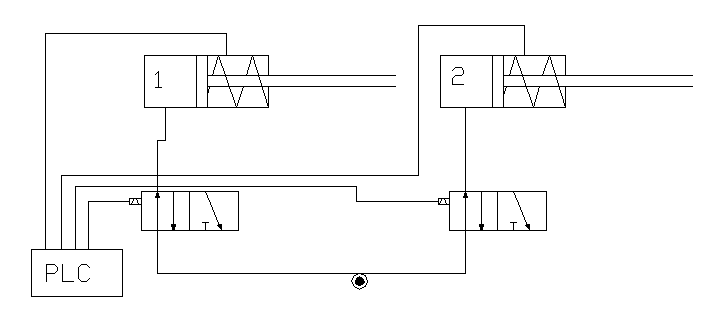
Zaprojektować układ pneumatyczny spełniający następujące zadanie:
dwa siłowniki mają za zadanie przytrzymywać blachy przygotowane do spawania.
aby spawacz miał czas na wykonanie pierwszej spoiny to uruchomienie pierwszego siłownika (S1) musi wyprzedzać uruchomienie drugiego siłownika (S2) o czas t0.
Cyklogram pracy siłowników:
t0
Zobrazowanie procesu:
Siła docisku S1 Siła docisku S2
Spoina 1
Spoina 2
Schemat układu pneumatycznego:
1
5
Sformułowanie problemu na podstawie projektu wstępnego maszyny lub urządzeni.
Ustalenie danych wyjściowych do projektu hydraulicznego (prędkość i obciążenia odbiorników) oraz dyspozycyjnej przestrzeni zabudowy.
Rodzaj energii do napędu pomp
Rodzaj energii w torze sterowania
Analiza ruchów i obciążeń
Ustalenie podstawowych parametrów układu i wybór cieczy
Obliczenia wstępne, wybór elementów oraz opracowanie schematu hydraulicznego.
Konsultacje i uzgodnienia z wytwórcami elementów.
Uwarunkowania zewnętrzne
Porównanie i ocena ofert pod względem ceny, kosztów eksploatacji i dostępności części zamiennych. Ostateczny dobór elementów.
Końcowa postać schematu hydraulicznego.
Opracowanie schematu montażowego, konstrukcji zabudowy elementów, instrukcji montażu i obsługi, zestawienie części zamiennych.
Ostateczna postać cyklogramu.
Schemat elektryczny.
Przyspieszenie
Ruch ustalony
Opóźnienie
S2 max
S1 max
Wyszukiwarka
Podobne podstrony:
Charakterystyki zaworow, Księgozbiór, Studia, LOOS
Uklady pneumatyczne o zadanym cyklu pracy, Księgozbiór, Studia, LOOS
Charakterystyka zaworu statyczna dlawiacego, Księgozbiór, Studia, LOOS
Pomiar sprawnosci silownika hydraulicznego, Księgozbiór, Studia, LOOS
Sprawozdanie z LOOS nr5, Księgozbiór, Studia, LOOS
Nhip, Księgozbiór, Studia, LOOS
Maszyny do obrobki plastycznej, Księgozbiór, Studia, LOOS
Maszyny technologiczne sterowane numerycznie, Księgozbiór, Studia, LOOS
Zawor przelewowy , Księgozbiór, Studia, LOOS
Napedy i ster. hydrauliczne(obr.), Księgozbiór, Studia, LOOS
Projektowanie sterowan pneumatycznych, Księgozbiór, Studia, LOOS
Zawor przelewowy (1), Księgozbiór, Studia, LOOS
Sciaga maszynoznastwo wyklad, Księgozbiór, Studia, LOOS
Maszyny energetyczne, Księgozbiór, Studia, LOOS
Spraw sprawnosc, Księgozbiór, Studia, LOOS
Charakterystyki zaworow, Księgozbiór, Studia, LOOS
sciaga hydrologia, Księgozbiór, Studia, Pozostałe
więcej podobnych podstron