Druga zasada dynamiki Newtona:
Jeżeli na ciało o pewnej masie m działają zewnętrzne siły F1, F2, F3, F4 ..., to pod wpływem tych sił ciało to porusza się z przyspieszeniem takim, że
Bryła sztywna
to takie ciało, w którym pod wpływem dziłających sił zewnętrznych nie zmienia się wzajemna odległość pomiędzy cząsteczkami tego ciała (siły te nie zmieniają kształtu ciała). Z definicji wynika, że dane ciało czasami możemy traktować jak bryłę sztywną (wtedy, gdy działające siły są zbyt małe aby to ciało odkształcić), a innym razem, gdy działające siły są większe, ciało przestaje być bryłą sztywną.
Momentem bezwładności
bryły sztywnej względem pewnej osi (definiuje się również inne momenty bezwładności) nazywamy wyrażenie
. Wzór ten odczytujemy następująco:
Aby znaleźć moment bezwładności ciała należy podzielić w myśli to ciało na fragmenty tak małe, aby każdy można było traktować jak punkt materialny o pewnej masie mi, pomnożyć jego masę przez kwadrat jej odlęgłości od osi obrotu ri2 i wszystkie otrzymane iloczyny do siebie dodać. Ta dosyć skomplikowana recepta może być zastoswana praktycznie tylko do ciał, które składają się ze skończonej liczby niewielkich elementów, które można potraktować w przybliżeniu jak zbiór niezależnych punktów materialnych. W praktyce, do ciał rzeczywistych, a więc takich dla których masa jest rozłożona w sposób ciągły stosuje się postać całkową definicji pozwalającą obliczać rzeczywiste momenty bezwładności:
We wzorze tym r2 oznacza zmienną określającą odległość elementu masy dm od osi obrotu.
W oparciu o tę zależność można stosunkowo prosto wyliczyć moment bezwładności kilku popularnych brył:
Wszystkie powyższe wzory określają moment bezwładności brył względem osi przechodzących przez środek masy danej bryły. Do określenia momentu bezwładności względem innej osi pomocne jest
Twierdzenie Steinera
Twierdzenie to mówi, że jeśli znamy moment bezwładności Io danego ciała względem pewnej osi przechodzącej przez środek masy tego ciała,
to aby obliczyć moment bezwładności I względem dowolnej innej osi równoległej do niej,
należy do momentu Io dodać iloczyn masy ciała i kwadratu odległości d między tymi osiami czyli md2:
Ilustruje to rysunek powyżej, na przykładzie którego możemy wyliczyć moment bezwładności kuli względem osi stycznej do kuli:
Moment siły
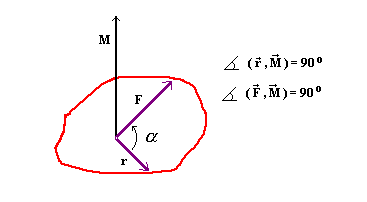
Moment M siły działającej na ciało to wielkość wektorowa określona przez iloczyn wektorowy działającej siły i promienia. Wektor momentu siły jest prostopadły do płaszczyzny wyznaczonej przez wektor siły i wektor r, a jego zwrot określa reguła śruby prawoskrętnej. Zgodnie z tą regułą, jeśli będziemy obracali po najkrótszej drodze pierwszy wektor (tu: r) tak, aby pokrył się z drugim (tu: F), to obracana w tym samym kierunku śruba prawoskrętna będzie przesuwać się (będzie wkręcana lub wykręcana) w kierunku określającym zwrot wektora M
Prędkość kątowa
obracającej się bryły to charakterystyczna dla ruchu obrotowego wielkość określająca kąt zakreślany przez bryłę w określonym czasie.
Każdy punkt obracającej się bryły ma inną prędkość liniową, natomiast prędkość kątowa wszystkich punktów bryły jest taka sama. Punkt odległy od osi obrotu o r ma prędkość liniową v taką, że
Należy pamiętać, że wektor prędkości kątowej jest prostopadły do płaszczyzny ruchu.
Przyspieszenie kątowe
obracającej się bryły określamy jako zmianę prędkości kątowej tej bryły w czasie.
Każdy punkt obracającej się bryły ma inne przyspieszenie liniowe, natomiast przyspieszenie kątowe wszystkich punktów bryły jest takie samo. Punkt odległy od osi obrotu o r ma przyspieszenie liniowe a takie, że
Należy pamiętać, że wektor przyspieszenia kątowego jest prostopadły do płaszczyzny ruchu.
Druga zasada dynamiki ruchu obrotowego
Mówi ona, że jeśli na pewne ciało, które posiada pewien swój moment bezwładności I zadziałają zewnętrzne siły, które wywrą na to ciało pewien wypadkowy moment siły M, to w wyniku tego działania ciało będzie obracać się z przyspieszeniem kątowym
takim, że
Energia kinetyczna
bryły sztywnej jest sumą energii kinetycznej jej ruchu postępowego Ekp i energii kinetycznej jej ruchu obrotowego Eko.
Prędkość v występująca we wzorze określa prędkość środka masy bryły, tak więc dla bryły, która nie przemieszcza się (n.p. tzw. blok nieruchomy), występuje tylko energia Eko związana z obrotem ciała.
Natomiast dla np. toczącej się kuli oba te składniki mają znaczenie i wtedy całkowita energia kinetyczna Ek wynosi:
Pracą
nazywamy iloczyn skalarny siły F działającej na ciało i wektora przemieszczenia s jaki ta siła wywołała:
Gdy działająca siła jest zgodna z kierunkiem przemieszczenia, cosinus we wzorze =1 i wzór można zapisać po prostu jako
. Gdy siła działa prostopadle do kierunku przemieszczenia, jej praca wynosi 0.
Wyszukiwarka
Podobne podstrony:
Fizyka - cw 305, Studia, Fizyka, Labolatoria
cieplo, Studia, Fizyka, Labolatoria
Fizyka - cw 307, Studia, Fizyka, Labolatoria
Fizyka - cw 102, Studia, Fizyka, Labolatoria
Fizyka - cw 108, Studia, Fizyka, Labolatoria
MECHANIKA, Studia, Fizyka, Labolatoria
KOŁO, Studia, Fizyka, Labolatoria
Fizyka - cw 203, Studia, Fizyka, Labolatoria
cw402-1, Studia, Fizyka, Labolatoria
Fizyka - cw 104, Studia, Fizyka, Labolatoria
Fizyka - cw 206, Studia, Fizyka, Labolatoria
Fizyka - cw 220, Studia, Fizyka, Labolatoria
224 i 115, Studia, Fizyka, Labolatoria
413, Studia, Fizyka, Labolatoria
Pomiar prędkości grawitacyjnych fal wodnych (ćw.224), Studia, Fizyka, Labolatoria
cw112-1, Studia, Fizyka, Labolatoria
cw111-2, Studia, Fizyka, Labolatoria
więcej podobnych podstron