Para podziałów П1 i П 2 stanów wewnętrznych to uporządkowana dwójka podziałów П 1--> П2 taka, że dla każdych dwóch stanów zawartych w pewnym bloku z П 1 i dla każdego xi![]()
X, xi - następniki tych stanów zawarte są w pewnym bloku podziału П 2
Dlaczego rachunek podziału wpływa na uproszczenie układu ?
Przy kodowaniu dąży się do znalezienia takich podziałów, aby funkcje przejść automatu zakodowanego zgodnie z tymi podziałami zależały od jak najmniejszej ilości zmiennych.
Co to jest para podziałów ?
Para podziałów П1 i П 2 stanów wewnętrznych to uporządkowana dwójka podziałów П 1--> П2 taka, że dla każdych dwóch stanów zawartych w pewnym bloku z П 1 i dla każdego xi![]()
X, xi - następniki tych stanów zawarte są w pewnym bloku podziału П 2
Co to są podziały prawidłowe ?
Podziałami prawidłowymi nazywamy podziały spełniające warunki:
- są to podziały dwublokowe
- liczba elementów każdego bloku 2k - 1
k jest to ilosc sygnałów
Etapy kodowania automatów synchronicznych z zastosowaniem rachunku podziałów
- Wyznaczyć zbiór par podziałów gdzie П --> τ gdzie τ jest pewnym podziałem dwublokowym lub w szczególności prawidłowym
- Narysować graf par podziałów
- Zaznaczyć na grafie podziały dogodne ze względu na wyjście
- Wybrać rodzinę Tkopt. o minimalnej cenie
Co to jest rodzina końcowa Tk i rodzina końcowa optymalna Tkopt ?
Rodziną końcową podziałów Tk nazywamy zbiór podziałów który można przyjąć do kodowania, tzn. zbiór spełniający warunek zerowego iloczynu
Rodziną końcową optymalną Tkopt nazywamy rodzinę końcową Tk wyznaczającą kod dający najprostsze funkcje przejść i wyjść (najprostszy układ)
Cena podziału wewnętrznego
Ceną podziału wewnętrznego c(τi) nazywamy szacunkową ilość zmiennych od których zależy funkcja wzbudzeń przerzutnika Qi zakodowanego zgodnie z τi zmniejszoną o 1.
Cenę podziału wewnętrznego wyznacza się z zależności
c(τi) = n + l - 1
gdzie
n - liczba zmiennych wejściowych
l - liczba sygnałów Ql od których zależy funkcja wzbudzeń przerzutnika Qi
Cena sygnału wyjściowego
Dla automatu Moore'a jako cenę sygnału wyjściowego przyjmuje się
c(yi) = l - 1
gdy yi = λ(Q1,..., Ql)
Dla automatu Mealy'ego cena sygnału wyjściowego wzrasta o liczbę zmiennych wejściowych n
c(yi) = n + l - 1
Łączna cena układu uwzględniająca zarówno cenę podziałów jak i cenę wyjść wyraża się wzorem
c = Σc(τi) +Σc(yi)
Czy do kodowania automatów synchronicznych można brać podziały nieprawidłowe ? Jeśli tak to czym to skutkuje ?
Tak, można brać podziały nieprawidłowe ale spowoduje to wzrost liczby elementów z pamięcią użytych do prawidłowego działania naszego automatu.
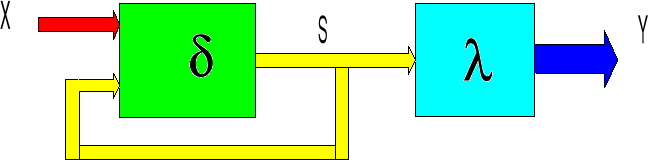
Struktura automatu Mealy'ego
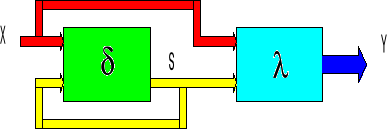
Struktura automatu Moore`a
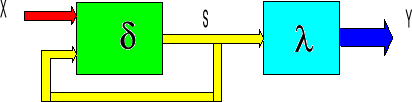
X - alfabet wejściowy (zbiór stanów wejściowych);
S - alfabet wewnętrzny (zbiór stanów wewnętrznych);
Y - alfabet wyjściowy (zbiór stanów wyjściowych);
δ - funkcja przejść δ = f(X,S);
λ - funkcja wyjść dla automatu Mealy'ego λ = f(X,S) dla automatu Moore'a λ = f(S)
Sposoby opisu automatów
- opis słowny
- wykresy czasowe
- tablica przejść wyjść
- grafy stanów układów
Warunki jakie musi spełniać zbiór maksymalnych stanów zgodnych Φopt
- każdy stan musi wchodzić co najmniej do jednej grupy (warunek pełności zbioru)
- dla każdej pary każdego zbioru muszą być spełnione wymogi zgodności warunkowej
Etapy minimalizacji automatu synchronicznego
- zbudowanie tablicy trójkątnej (wpisujemy warunki i wykreślamy wszystkie klatki o sprzecznych wyjściach; klatki niewykreślone, bez względu na zawartość, odpowiadają parom stanów zgodnych
- tworzymy graf relacji zgodności (tworzymy maksymalne grupy stanów zgodnych)
- wyznaczamy zbiór Φ i Φopt
Napisać różnice między automatem Millego - Moorego. (jedna podstawowa różnica)
Automaty, w których stany wyjściowe zmieniają się w czasie zmiany stanu automatu, a więc zależą tylko od stanu automatu, nazywane są automatami Moore'a,
Automaty, w których stany wyjściowe zmieniają się także w czasie zmiany stanu sygnałów wejściowych, a więc zależą i od stanu automatu i od stanu sygnałów wejściowych, nazywane są automatami Mealy'ego.
Różnice miedzy układem kombinacyjnym a sekwencyjnym
Układy kombinacyjne.
To takie układy, których stany wyjść są zawsze jednoznacznie określone przez stany wejść. Oznacza to ze odprowadzając na wejście takich układów określona kombinacje sygnałów binarnych, otrzymujemy na wyjściu odpowiedzi specyficzne dla zastosowania wymuszeń i funkcji logicznej, jaka wykonują układy, niezależnie od tego co działo się z tymi układami wczesnej. Można zatem powiedzieć ze są to układy bez pamięci. Ich przedstawicielami są bramki.
Układy sekwencyjne
Są to układy cyfrowe, których stany wyjść zależą od aktualnych stanów wejść oraz od tego, co się działo z układem poprzednio, czyli jakie stany wejść zadawane były w chwilach poprzedzających. Są to układy z pamięcią gdyż w ich działaniu oprócz wymuszeń aktualnych istotną rolę spełniają stany poprzednie. Przykłady: przerzutniki.
Podział ၰ1 jest nie większy od podziału ၰ2 , czyli
ၰ1 Ⴃ ၰ2
gdy każdy blok z ၰ1 jest zawarty w pewnym bloku ၰ2
{1, 2, 3, 45, 67} Ⴃ { 12, 345, 67}
Największym i najmniejszym podziałem zbioru
S = {1,2,3, ..., n}
są odpowiednio podziały
jedynkowy { 12...n } = 1
zerowy { 1, 2, ..., n } = 0
Czy nieprawidłowy może być w rodzinie końcowej?
Chyba tak ale nie jeśli chcemy użyć minimalnej liczby elementów pamięci.