ELEKTROTECHNIKA Z NAPĘDAMI |
||
Ćwiczenie EA5 - Silnik dwufazowy indukcyjny wykonawczy |
||
Grupa V |
Data wykonania ćwiczenia 4 III 2002 |
|
Imię i nazwisko |
Ocena |
Data Zaliczenia |
Tylus Dariusz |
|
|
Zaor Oktawiusz |
|
|
Zięba Paweł |
|
|
Wójcik Leszek |
|
|
Wasilewski Paweł |
|
|
Cel ćwiczenia:
Celem ćwiczenia jest zmierzenie:
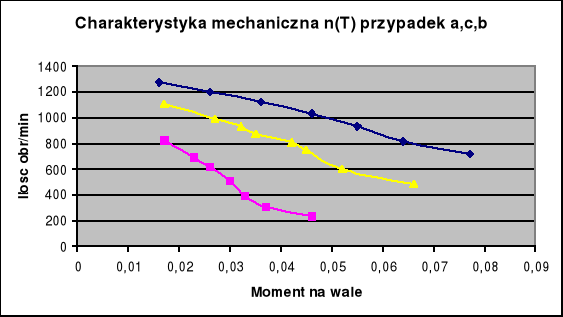
Charakterystyk mechanicznych zależności prędkości obrotowej od momentu na wale układu silnik wykonawczy-maszyna hamulcowa n=f(T) dla następujących wartości amplitudy i fazy napięcia sterującego:
Ust=Uw=110 V, β=900
Ust=0,5Uw=55 V, β=900
Ust=Uw=110 V, β=600
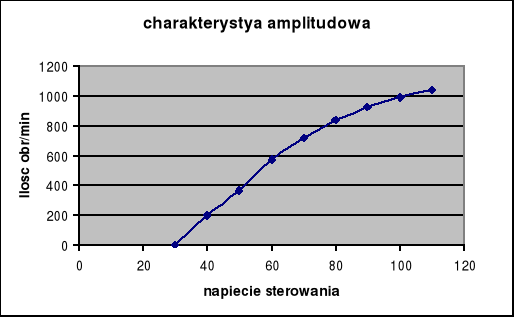
Charakterystyk sterowania amplitudowego n=f(Ust) przy przesunięciu fazowym β=900
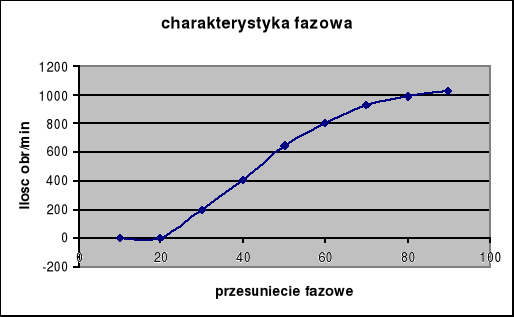
Charakterystyk sterowania fazowego n=f(β) przy amplitudzie napięcia sterującego równej napięciu wzbudzenia.
Wzory wykorzystane do obliczeń:
Up - napięcie prądnicy magnetoelektrycznej
Ip - prąd prądnicy magnetoelektrycznej
Rp - rezystancja uzwojenia twornika prądnicy magnetoelektrycznej
ΔPo - suma strat w rdzeniu prądnicy magnetoelektrycznej i mechanicznych układu
Rp=26 [Ω]
2. Pomiar charakterystyk mechanicznych.
Wielkościami mierzonymi są: prędkość obrotowa n, napięcie i prąd prądnicy obciążającej Ip Up.
Przypadek a)
Ust = 110 [V], β = 900 |
|||||||
n [obr/min] |
Ip [A] |
Up [V] |
UpIp [W] |
RpIp2 [W] |
Po [W] |
Ppob [W] |
T [Nm] |
1276 |
0 |
29 |
0 |
0 |
2,223 |
2,233 |
0,016 |
1197 |
0,05 |
24,2 |
1,21 |
0,065 |
2,095 |
3,37 |
0,026 |
1123 |
0,10 |
21 |
2,1 |
0,26 |
1,965 |
4,325 |
0,036 |
1032 |
0,15 |
17,5 |
2,625 |
0,585 |
1,806 |
5,016 |
0,046 |
932 |
0,20 |
13,5 |
2,7 |
1,04 |
1,631 |
5,371 |
0,055 |
818 |
0,25 |
9,7 |
2,425 |
1,625 |
1,431 |
5,481 |
0,064 |
720 |
0,30 |
7,5 |
2,25 |
2,34 |
1,26 |
5,85 |
0,077 |
Przypadek b)
Ust = 55 [V], β = 900 |
|||||||
n [obr/min] |
Ip [A] |
Up [V] |
UpIp [W] |
RpIp2 [W] |
Po [W] |
Ppob [W] |
T [Nm] |
828 |
0 |
19 |
0 |
0 |
1,449 |
1,449 |
0,017 |
691 |
0,03 |
13,5 |
0,405 |
0,023 |
1,209 |
1,637 |
0,023 |
615 |
0,05 |
11 |
0,55 |
0,065 |
1,076 |
1,691 |
0,026 |
512 |
0,075 |
8 |
0,6 |
0,146 |
0,896 |
1,642 |
0,030 |
391 |
0,1 |
4,5 |
0,45 |
0,26 |
0,684 |
1,358 |
0,033 |
310 |
0,12 |
2,3 |
0,276 |
0,374 |
0,542 |
1,192 |
0,037 |
231 |
0,13 |
0,2 |
0,26 |
0,439 |
0,404 |
1,103 |
0,046 |
Przypadek c)
Ust = 110 [V], β = 600 |
|||||||
n [obr/min] |
Ip [A] |
Up [V] |
UpIp [W] |
RpIp2 [W] |
Po [W] |
Ppob [W] |
T [Nm] |
1110 |
0 |
25 |
0 |
0 |
1,942 |
1,942 |
0,017 |
992 |
0,05 |
19,5 |
0,975 |
0,065 |
1,736 |
2,776 |
0,027 |
936 |
0,075 |
18,2 |
1,365 |
0,146 |
1,638 |
3,149 |
0,032 |
875 |
0,1 |
15 |
1,5 |
0,26 |
1,531 |
3,291 |
0,035 |
808 |
0,125 |
13,8 |
1,725 |
0,406 |
1,414 |
3,545 |
0,042 |
750 |
0,15 |
11 |
1,65 |
0,585 |
1,312 |
3,547 |
0,045 |
604 |
0,2 |
6 |
1,2 |
1,04 |
1,057 |
3,297 |
0,025 |
480 |
0,25 |
3,5 |
0,875 |
1,625 |
0,84 |
3,34 |
0,066 |
3. Pomiar charakterystyk sterowania.
W przypadku pomiaru charakterystyki sterowania amplitudowego faza napięcia sterującego wynosi 900, natomiast wartość skuteczną tego napięcia regulujemy od 110 [V] w dół co 10 [V] aż do zatrzymania silnika. Prądnica magnetoelektryczna jest nieobciążona. Mierzonymi wielkościami są prędkość obrotowa n i napięcie sterujące Ust.
Charakterystyka sterowania amplitudowego β = 900 |
||
Ust [V] |
n [obr/min] |
|
110 |
1039 |
|
100 |
990 |
|
90 |
928 |
|
80 |
839 |
|
70 |
717 |
|
60 |
576 |
|
50 |
370 |
|
40 |
200 |
|
30 |
- |
|
Wykonując pomiar charakterystyki sterowania fazowego wartość skuteczną napięcia ustawiamy na 110 [V], natomiast przesunięcie fazowe względem napięcia wzbudzenia regulujemy od 900 co 100 w dół aż do zatrzymania silnika. Prądnica magnetoelektryczna jest nieobciążona. Wielkościami mierzonymi są: prędkość obrotowa n i faza napięcia sterującego.
Pomiar charakterystyki sterowania fazowego Ust = 110 [V] |
|
β [ 0] |
n [obr/min] |
90 |
1029 |
80 |
992 |
70 |
932 |
60 |
804 |
50 |
644 |
40 |
406 |
30 |
200 |
20 |
- |
10 |
- |
Wnioski:
Pomierzone charakterystyki mechaniczne i regulacyjne silnika dwufazowego indukcyjnego spełniają wymagania stawiane silnikom wykonawczym. Przedstawiają nam jednoznaczne zależności funkcyjne odpowiedzi mechanicznej, którą mogą być: kąt obrotu wału lub prędkość obrotowa od elektrycznego sygnału sterującego, którym jest wartość lub faza napięcia sterującego.
Wyszukiwarka
Podobne podstrony:
A-03 Komparator, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Pod
2Filtry analogowe, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), T
sumator szeregowy projekt, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (mod
kolokwium2-ts, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarzanie Syg
sprawko kompensacja, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C),
Licznniki, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy
jh, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy sterowa
FiltryAdaptacyjne sprawozdanie, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i
substraktor jakis ale spoko, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (m
Liczniki1, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstawy
filtracja adaptacyjna, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarz
3-fazowe silniki indukcyjne, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (m
FIRy, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarzanie Sygnałów, Ko
projekty-2011-2012, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C),
TC-S-04 Rejestry, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Po
Sprawko PSL, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C), Podstaw
więcej podobnych podstron