Wykład
Temat: Elektroniczne systemy pomiaru kątów
A w nim: Charakterystyka elektronicznych systemów pomiaru kątów - kodowego, impuslowego i dynamicznego.
Dotychczasowe systemy pomiaru kątów lub kierunków wykorzystywały optyczne urządzenia, które pozycjonowały położenie osi celowej lunety na kręgu poziomym. Wykonanie odczytu w danym systemie optycznym określało kierunek osi celowej względem zera kręgu poziomego. Kąt określony był z różnicy odczytów dwóch kierunków. Dążąc jednak do jak największej automatyzacji pomiarów niezbędne okazało się zastosowanie elektronicznych systemów pomiaru kątów. Pozwoliły one na wykluczenie odczytu kierunku przez obserwatora zwiększając w ten sposób wydajność pomiarów. Dodatkowo umożliwiły one rejestracje oraz automatyczne opracowanie wyników pomiarów. Elektroniczne system pomiaru kierunków wymagają zastosowania przetworników zamieniających mierzony kierunek na odpowiednie sygnały elektroniczne. Sygnały elektroniczne powinny zostać przetworzone w taki sposób, aby uzyskać wielkości dogodne do obliczania, wyświetlania i rejestracji kierunków.
|
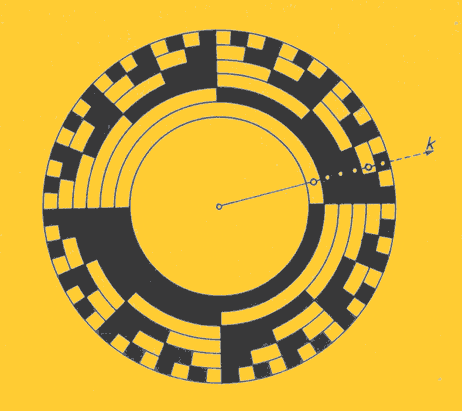
Rys. 1 Tarcza kodowa |
W istniejących i stosowanych aktualnie systemach elektronicznych można wyróżnić dwa rodzaje przetworników typu kąt-napięcie (natężenie):
Grupa I - przetworniki położenia, każdemu położeniu lunety teodolitu odpowiada jednoznacznie określony stan napięcia. Należą do tej grupy przetworniki kodowe.
Grupa II - przetworniki kąta, odpowiednim zmianom położenia lunety odpowiada ściśle określona liczba impulsów - przetworniki impulsowe.
Systemy kodowe pomiaru kierunków
W jednoznaczny sposób wyświetlają położenie osi lunety do położenia zerowego(system bezwzględny). Najistotniejszym elementem systemu jest tarcza kodowa zastępująca krąg poziomy w teodolicie(patrz rys.1). Sprężona jest z alidadą teodolitu, na której jest luneta. Na tarczy kodowej znajduje się wiele koncentrycznych ścieżek o różnych średnicach, przy czym na każdej z tych ścieżek znajduje się na przemian ległe pola jasne i ciemne. Uzyskanie odpowiedniej dokładności odczytu kierunku wymaga zastosowania tarczy kodowej z odpowiednią liczbą ścieżek, z których ostatnia musi być podzielona na pola o bardzo małych odstępach. Na przykład chcąc uzyskać dokładność 1cc ilość ścieżek musiałaby wynosić 222. Przy średnicy koła 13 cm szerokość ścieżki musiałaby być równa 0,097µm. Wykonanie tak drobnego podziału jest niemożliwe. W praktyce uzyskano najwyżej 12 ścieżek, co daje dokładność 10c pomiaru kierunku. Istnieje, więc bariera technologiczna, która powoduje, że ten system jest stosowany w wielu teodolitach najwyżej do pomiaru zgrubnego.
Zasada działania
W nieruchomej części teodolitu znajduje się czytnik w postaci matrycy fotoelektrod i fotodiód, które oświetlają fotodetektory równoległą wiązką optyczną (rys.2).
|
Rys. 2 Zasada funkcjonowania czytnika fotodiodowego |
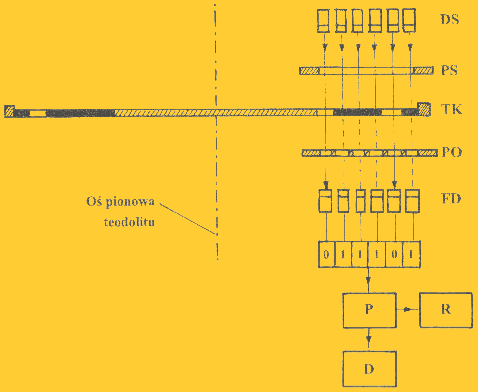
Wiązka przepuszczana przez pola przeźroczyste kręgu wzbudza w odpowiedniej diodzie sygnał elektryczny (napięcie). Sygnał nie powstanie, gdy na drodze wiązki znajdzie się pole nieprzeźroczyste. W każdym fotodetektorze powstać mogą, więc dwa stany kodu dwójkowego. Gdy połączymy wszystkie odczyty z matrycy fotodetektorów otrzymamy odczyt kierunku w kodzie dwójkowym.
Systemy impulsowe pomiaru kierunków
W odróżnieniu od systemu kodowego zastosowano w nim tarcze z jedną ścieżką zawierającą N równych interwałów oraz czytnik impulsów, generowanych w trakcie obrotu tarczy. Tarcza i czytnik tworzą tzw. impulsowy przetwornik kąta. Przetwornik taki może działać na zasadzie galwanicznej, magnetycznej lub optycznej. W przyrządach geodezyjnych stosowane są tylko przetworniki optyczne ze względu na swoją najwyższą dokładność.
W przetworniku ścieżka kręgu podziałowego zawiera N pól przeźroczystych oddzielonych od siebie polami nieprzeźroczystymi. Przy czym podstawową działką systemu jest tak zwany inkrement o szerokości 2N (pole przeźroczyste i nieprzeźroczyste). Wartość kątowa takiego inkrementu równa się 400g/N. Sygnał elektryczny, który powstaje w fotodiodzie, jest najpierw wzmacniany a następnie przekształcany w przebieg prostokątny. Ten po zróżniczkowaniu zamieniany jest na przebieg impulsowy (Rys. 3).
|
Rys. 3 Przebieg obróbki sygnału elektrycznego z fotodiody |
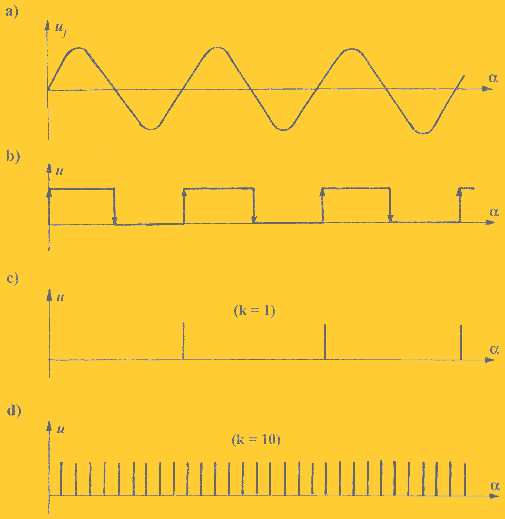
Ilość impulsów zliczana jest przez licznik. Na jej podstawie wyznacza się wartość kąta na podstawie zależności:
.
Współczesne teodolity elektroniczne zawierają do 100 rysek na 1 milimetr obwodu tarczy, co daje ok. 20 000 rysek na średnicy tarczy ok. 636 mm. Jedno pole pomiarowe jest równe 2c Dokładność takiego pomiaru zwiększa pomiar reszty d. Tą resztę dopełniającą wartość zgrubną kąta wyznacza się drogą interpolacji np. w jednym z rozwiązań może być zagęszczanie impulsów szpilkowych impulsami o większej rozdzielczości. Wtedy stosując n-krotne jej zwiększanie kąt wyznaczamy ze wzoru:
Opisany powyżej sposób pomiaru nie pozwala na określenie kierunku ruchu tarczy. Gdy zmienilibyśmy ten kierunek na przeciwny impulsy zliczane były by w dalszym ciągu powiększając wynik, co nie byłoby zgodne z prawdą. Dlatego przy impulsowym pomiarze kierunków niezbędne jest zastosowanie rozwiązania konstrukcyjnego pozwalającego na wykrycie kierunku ruchu oraz uwzględnienie go w wynikach. Przykładem może być zastosowanie tarczy z dwoma identycznymi ścieżkami rysek impulsowych - zasadniczej A i pomocniczej D (Rys.4).
|
Rys. 4 Schemat zastosowania tarczy z dwoma identycznymi ścieżkami rysek impulsowych |
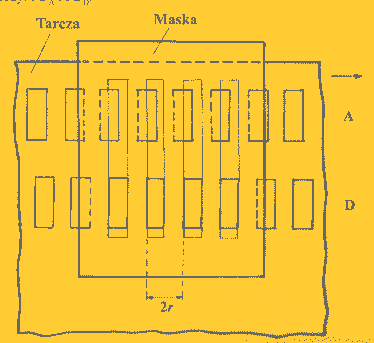
Interwały ścieżki pomocniczej D przesunięte są względem A o 1 ich długości 2r. Dzięki temu po przekształceniach sygnałów z obu ścieżek uzyskuje się różny przebieg dla różnych kierunków ruchu alidady. Zastosowanie tego rozwiązania pozwala dodatkowo na czterokrotne zwiększenie rozdzielczości.
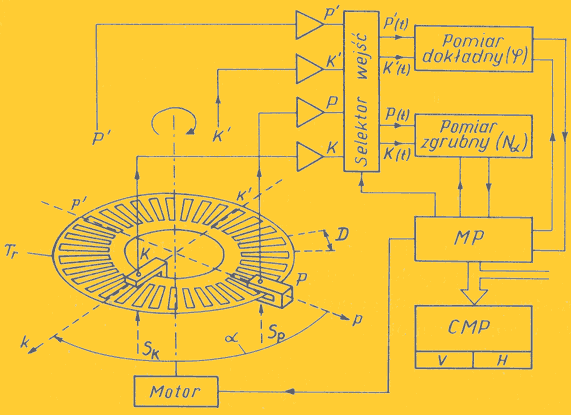
Dynamiczny system pomiaru kątów
System ten jest systemem impulsowym, składającym się z wirującej tarczy z naniesionymi polami przeźroczystymi i nieprzeźroczystymi oraz dwóch czytników fotoelektrycznych określających bezwzględne położenie obydwu ramion mierzonego kąta (Rys.5).
Pomiar kąta składa się z pomiaru zgrubnego i dokładnego. Do pomiaru zgrubnego na tarczy umieszczony jest dodatkowy element, który uruchamia system w momencie przejścia przez pierwszy czytnik i zamyka przy przejściu przez drugi. Zliczane są przy tym całkowite ilości interwałów pomiarowych. Pomiar precyzyjny jest w zasadzie pomiarem różnicy czasów między sinusoidalnymi sygnałami pomiarowymi powstającymi w obu czytnikach - jednym nieruchomym związanym ze spodarką i drugim ruchomym związanym z lunetą. Różnica czasów określona jest pośrednio jako różnica kątów fazowych jak w fazomierzach cyfrowych dalmierzy elektronicznych. Dzięki temu, że różnica faz jest uśredniana z kilku tysięcy okresów to dokładność tego systemu jest w zasadzie większa od klasycznych systemów impulsowych.
|
Rys. 4 Schemat zastosowania tarczy z dwoma identycznymi ścieżkami rysek impulsowych |
Nie trzeba przy tym stosować zwiększonej rozdzielczości przez zwiększenie częstotliwości zliczania impulsów. Jest to układ prosty. W systemie tym określone jest położenie kierunkowe osi celowej względem czytnika nieruchomego, które odpowiada jak gdyby położeniu kręgu poziomego w optycznych teodolitach.
Literatura:
A. Płatek "Geodezyjne dalmierze elektromagnetyczne i tachimetry elektroniczne", Warszawa 1991
A. Płatek "Elektroniczne techniki pomiarowe w geodezji", Kraków 1995
K. Holejko "Precyzyjne elektroniczne pomiary w geodezji", Warszawa 1987
J. Tatarczyk "Etapy rozwoju teodolitów kodowych", Warszawa 1979
M. Krauss "Systemy pomiarowo informacyjne", Warszawa 1979
Wyszukiwarka
Podobne podstrony:
ETP wyklad 12 elektroniczne systemy pomiaru katow
Dok-adno+é+á pomiaru odleg-o+éci, geodezja podstawy
5 Podstawy Metrologii systemy pomiarowe
etzi-zagadnienia do zaliczenia-2016, ELEKTRONIKA I TELEKOMUNIKACJA PRZ - systemy pomiarowe i diagnos
1. Podstawowe określenia. Jednostki miary, AM Gdynia, Sem. III,IV, Miernictwo i systemy pomiarowe- D
Tabela pomiarowa do czestotliwosci, Laboratorium z podstaw elektrotechniki i elektroniki
1224048119 Tabela pomiarowa do pomiaru pradu i napiecia, Laboratorium z podstaw elektrotechniki i el
1224048119 Tabela pomiarowa do pomiaru pradu i napiecia, Laboratorium z podstaw elektrotechniki i el
Systemy pomiarowo-regulacyjne, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3,
Elektroniczna technika pomiarowa -, geodezja, Elektroniczna technika pomiarowa
milczarski,elektroniczna technika pomiarowa, systemy GPS
8 Okre-lanie dokładno-ci pomiaru kierunku poziomego według standardu ISO 17123(1), geodezja podstawy
Dalmierze elektromagnetyczne, geodezja podstawy
Podstawowe wiadomości o elektrochemicznych metodach pomiarowych
ETP1, geodezja, Elektroniczna technika pomiarowa
d.POMIARY NAP. ZM, Studia, Podstawy elektroniki
cw 1 Pomiar parametrow oscyloskopu oraz podstawowych wielkości elektrycznych
więcej podobnych podstron