Ćwiczenie nr 5
REGULACJA IMPULSOWA
Laboratorium Automatyki i Sterowania
Zakład Energoelektroniki i Sterowania
1. CEL ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z pojęciami podstawowymi regulacji impulsowej. Badanie członów układu otwartego poprzez rejestrację odpowiednich przebiegów ciągłych, zdyskretyzowanych oraz elementarnych układów zamkniętych.
2. REGULATORY IMPULSOWE - WPROWADZENIE.
W technice sterowania i technice przesyłania i przetwarzania informacji występują często sygnały dyskretne. Dyskretyzacja sygnału może polegać na operowaniu dyskretnymi wartościami sygnału jak również dyskretnymi wartościami argumentu, to jest czasu. Sygnały występujące w dyskretnych chwilach czasu nazywa się sygnałami impulsowymi. Stosowanie techniki impulsowej w wielu sytuacjach upraszcza konstrukcję urządzeń i uzyskuje się większą odporność układu na zakłócenia.
Układ impulsowy jest to układ, w którym występują sygnały impulsowe.
Rys.1. Przykłady sygnałów impulsowych.

a) Sygnał impulsowy z modulacją amplitudy
b) Sygnał impulsowy z modulacją szerokości
Dyskretyzacja sygnału ciągłego może dotyczyć czasu, amplitudy oraz równocześnie czasu i amplitudy. Dyskretną obróbkę sygnału ciągłego przedstawia rys. 2.
Rys. 2. Postacie sygnałów: a) ciągły; b) kwantowany w poziomie; c) kwantowany w czasie (dyskretny); d) kwantowany w czasie i w poziomie
Twierdzenie Shanona określa minimalną częstotliwość próbkowania sygnału analogowego przy której istnieje możliwość odtworzenia bez zniekształceń oryginalnej postaci sygnału na podstawie impulsów. Twierdzenie Shanona daje się sformułować w następujący sposób: Minimalna częstotliwość próbkowania ωp sygnału ciągłego o widmie zawartym w paśmie 0![]()
ω<ωg jest równa lub większa od podwójnej częstotliwości granicznej widma sygnału ωp![]()
2 ωg
W układach regulacji impulsowej regulator działa tylko w pewnych powtarzających się periodycznie chwilach czasu, zwanych okresami impulsowania. W regulatorze impulsowym wielkość ciągła, będąca określoną funkcją wielkości regulowanej zostaje poddana modulacji impulsowej, najczęściej modulacji szerokości impulsu o stałym lub prawie stałym okresie.
Wielkość wyjściowa jest więc wielkością nieciągłą i przyjmuje najczęściej tylko dwie lub trzy wartości (umownie: 0,1 lub -1, 0, +1).
W regulatorach impulsowych istnieje możliwość zastosowania modulacji zarówno szerokości, amplitudy i częstotliwości sygnału.
Modulacja szerokości impulsu stosowana jest znacznie częściej od modulacji amplitudy i modulacji częstotliwości sygnału. Modulacja ta pozwala na stosowanie prostych, tanich i pewnych wzmacniaczy mocy o działaniu przekaźnikowym ( dwu- lub trójpołożeniowych) dających efekt zbliżony do działania ciągłego, ponieważ średnia wartość wielkości wyjściowej regulatora jest wówczas zmienna w sposób ciągły.
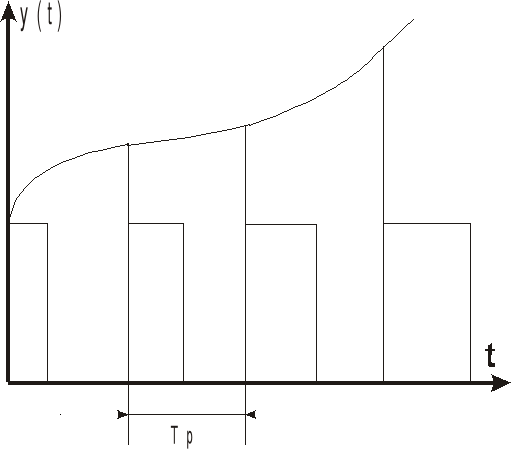
Schemat blokowy układu regulacji impulsowej z modulacją szerokości impulsu oraz przebieg wielkości wyjściowej przedstawiono na rys.3.
Rys.3. Schemat blokowy układu regulacji impulsowej, gdzie: R1 - regulator impulsowy, S - silnik (element całkujący)
Układy regulacji impulsowej z modulacją szerokości impulsu są układami nieliniowymi. W pewnych jednak przypadkach, gdy największa szerokość impulsu jest wielokrotnie mniejsza od okresu impulsowania, układ taki można z dobrym przybliżeniem traktować jako układ liniowy. Przebiegi występujące w układach impulsowych zapisuje się za pomocą funkcji schodkowych (dyskretnych), co pozwala sprawdzić analizę własności dynamicznych takich układów do badań liniowych równań różnicowych.
Regulacja impulsowa zyskuje obecnie na znaczeniu, szczególnie w rozwiązaniach z wykorzystaniem systemów komputerowych, które mogą kolejno, impulsowo sterować wieloma układami regulacji.
3. UKŁAD ĆWICZENIA.
Ćwiczenie wykonuje się za modelu układu regulacji impulsowej, którego schemat pokazano na rys.3. Obiekt regulacji (ciągły) ma transmitancję

przy czym można niezależnie wyłączać efekt opóźnienia (![]()
), całkowania (![]()
) i inercji ![]()
. Regulator jest typu PID, każde z działań składowych można wyłączyć lub włączyć z odpowiednim współczynnikiem. Regulator jest połączony z obiektem za pośrednictwem ekstrapolatora zerowego rzędu, nieidealnego. Okres impulsowania można nastawić na wartość 1 lub 2 sekundy.
Sygnałami wymuszającymi są sygnały wartości zadanej Y0 lub zakłócenia Z, mogące zmieniać się skokowo (odpowiednie przyciski) lub w sposób ciągły (ręcznie za pomocą pokręteł). W trakcie ćwiczenia bada się przebiegi sygnałów w układzie (otwartym lub zamkniętym) za pomocą rejestratora. Sygnały ε i Y są ciągłe, natomiast ε*, U, Y* - dyskretne (o postaci przebiegów schodkowych).
Rys.4. Schemat płyty czołowej ćwiczenia laboratoryjnego
Rys 5. Płyta czołowa modelu regulacji impulsowej.
1. Sygnał wartości zadanej,
2. Sygnał zakłócający,
3. Opóźnienie,
4. Całkowanie,
5. Inercja,
6. Załączenie/wyłączenie sprzężenie zwrotnego.
4. POMIARY
Badanie członów układu otwartego
Zarejestrować przebiegi na wejściu i wyjściu podstawowych elementów układu:
ekstrapolatora (np. ε i ε* przy ciągłych zmianach ε),
regulatora (jego poszczególnych działań składowych PID),
obiektu (różnych wariantów, przy czym określić wartość stałej czasowej inercji).
Badanie właściwości elementarnych układów zamkniętych
Zarejestrować przebiegi w najprostszych układach zamkniętych przy różnych wartościach parametrów. Ustawić regulator tylko na działanie P, I lub D, zaś obiekt jako proporcjonalny lub całkujący (z opóźnieniem lub bez).
5.SPRAWOZDANIE.
Sprawozdanie powinno zawierać:
schematy układów pomiarowych,
wyniki w postaci wykresów,
wnioski.
6. LITERATURA:
-„Poradnik inżyniera automatyka” pod red. Władysława Findeisena ; Kazimierz Bisztyga 1969.
-Regulacja impulsowa / J. Eckermann, Warszawa : Wydaw. Naukowo-Techniczne, 1976.
-Laboratorium teorii sterowania. Cz. 1 / Krzysztof Amborski Warszawa : Oficyna Wydaw. Politech. Warszawskiej, 2002.
1
2
3
4
5
6
Wyszukiwarka
Podobne podstrony:
Regulacja ekstremalna nr3, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Pytania trans mps, UTP Bydgoszcz Elektrotechnika, automatyka
Ćwiczenie nr 1, UTP Bydgoszcz Elektrotechnika, automatyka
Ident. obiektu dynamicznego nr2, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Pytania indukc synchroniczne, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Modelowanie analogowe nr4, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Zakres badan JEE, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Badanie układów trójfazowych symetrycznych, UTP Bydgoszcz Elektrotechnika, II semestr
Jakość energii elektrycznej wstep, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Instytut Energetyki Jakosc i niezawodnosc, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
dławik, UTP Bydgoszcz Elektrotechnika, III semestr, teoria obwodów laborka
maruszczak, UTP Bydgoszcz Elektrotechnika, III semestr, projekt teoria obwodów maruszczak
7 Mostek Thomsona, UTP Bydgoszcz Elektrotechnika, metrologia ( sprawozdania )
WM-Zaoczni- Pytania - kolokwium 2010, Materiały uczelniane, UTP Bydgoszcz, Transport, Automatyka, Au
Symulacyjna analiza widmowa czwórników pasywnych, UTP Bydgoszcz Elektrotechnika, III semestr, teoria
Jak czytac fakture, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Jakość energii elektrycznej Wikipedia, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
sprawozdanie 1 (grupa B), UTP Bydgoszcz Elektrotechnika, II semestr
Ogranicznik amplitudy, UTP Bydgoszcz Elektrotechnika, IV semestr, energoelektronika
więcej podobnych podstron