Układy nieliniowe automatyki to układy: a) takie, których działanie można opisać z wystarczającą dokładnością nieliniowymi modelami
Podaj definicję transmitancji operatorowej (przepustowości operatorowej: Stanowi kompletny opis własności elementu lub rozkładu liniowego jest to stosunek transformaty wielkości wyjściowej Y(s) do transformaty wielkości wejściowej X(s) przy zerowych warunkach początkowych
Metoda funkcji opisującej służy do badania:
quasiliniowych układów automatyki
układów opisanych równaniami różniczkowymi liniowymi
Transmitancja operatorowa postaci G(s)= xst 1/s, gdzie x(t)=xst, t>0 to transmitancja: a) wymuszenia skokowego
Charakterystyki dynamiczne układów ciągłych automatyki opisują zależności między sygnałem wyjściowym y(t), a sygnałem wejściowym x(t), typu:
a)y(t)=f[x(t)]
Linearyzacja modeli matematycznych dynamiki nieliniowych układów automatyki opiera się na rozwinięciu funkcji nieliniowych w szereg Taylora wokół:
a) funkcji liniowych c) zawsze w początku układu współrzędnych
Podstawowy człon automatyki, w którym: x(t) jest wielkością wejściową, y(t) jest wielkością wyjściową , charakteryzujący się równaniem

to człon:
b) całkującyObiekt regulacji liniowy inercyjny pierwszego rzędu to obiekt: b) statyczny
Złożony proces technologiczny lub ekonomiczny jest:
c) funkcją dyspozycji
Podaj definicję regulatora w układzie regulacji automatycznej: Regulator jest to urządzenie w którym sygnały wejściowe powstają jako wynik realizacji co najmniej dwóch funkcji przetwarzania. Wejście stanowią sygnały wartości mierzonej wielkości regulowanej oraz wartość zadana wielkości regulowanej. Wyjście zaś stanowi jeden sygnał.
Regulator PI, to regulator: b) proporcjonalno-całkujący
Stabilność układu automatyki to własność układu polegająca na:
powracaniu do pierwotnego stanu ustalonego
osiąganiu nowego stanu ustalonego, jeśli zakłócenie pozostało na stałym poziomie
własności a) i b) razem wzięte
Do klasy liniowych układów automatyki stosuje się kryterium stabilności: a) Hurwitza b) Michajłowa
c) Nyquista
Wymień najmniej dwie zasady (metody, teorie) służące do wyznaczania sterowania optymalnego:
1. wygenerowanie wektora stanu i wektora sterowania dla ukształtowania odpowiedniego przebiegu czasowego
2. przeprowadzenie obiektu ze stanu początkowego do stanu końcowego, tak aby kryterium optymalności osiągnęło ekstremum
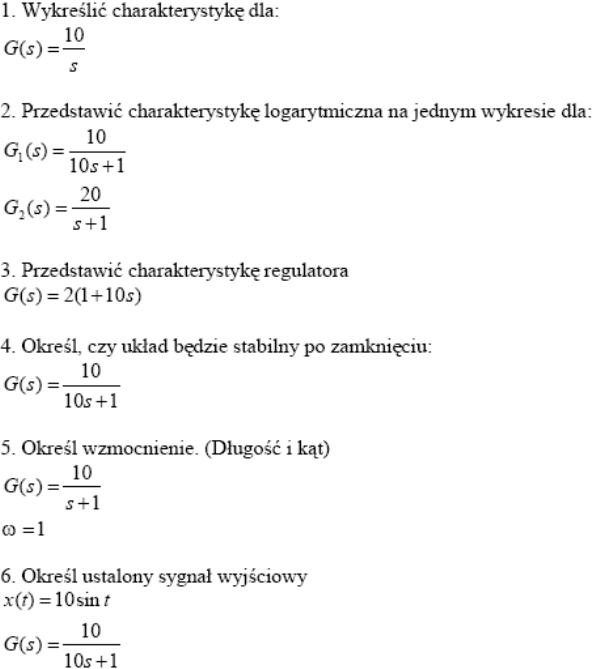
ZESTAW 1
G1(s)=10s ; G2(s)=10/s ; x(t)=2sin10t ; y(t)=? Nie wiem jakie polecenie... :/
Przedstawić komplet charakterystyk elementu G(s)=10/(0,1s+1)
Określić wektor wzmocnienia G(s)=2(1+10s) dla ω=0,1
Przestawić charakterystyki regulatora G(s)=10(1+1/s)
Przedstawić e(t) oraz y(t) dla regulatora PJ. Przedstawić skok zakłócenia jednostkowego. Jak odbije się to na sygnale wyjścia i błędzie?
Określić, czy układ zamknięty jest stabilny G(s)=10/(s^2+3s+2) przedstawić na płaszczyźnie Gaussa przebiegi czasowe.
Przedstawić y(t) i e(t) jeśli układ z regulatorem P, PJ, PD, PJD i ma skok jednostkowy.
ZESTAW 2
Charakterystyki elementu różniczkującego.
Określić sygnał wyjściowy gdy element ma transmitancję:
G(s)=2/(s+1) x=5sin10t
Określić przebieg błędu e(t) przy skoku zakłóceń w zależności od zastosowanego regulatora. Zrobione przy 7/zestaw1
Narysuj charakterystyki elementu G(s)=5/s
Schemat mocy i sterowania przy impulsowym załączaniu silnika.
Granice dopuszczalne wzmocnienie serwomechanizm Nie wiem o co chodzi...
ZESTAW 3
Charakterystyka elementu G(s)=20/0,1s+1
Charakterystyka elementu całkującego.
Określić sygnał wyjściowy gdy:
x(t)=5sin(0,1t) G(s)=sKlasyczna metoda sprawdzania stabilności (metoda pierwiastków)
Układ mocy i sterowania silnika elektrycznego z 2 kierunkami obrotów.
Układy funkcjonalnie pełne Co to jest....?
ZESTAW 4
ZESTAW 5
Przedstaw redundancję układu mocy i sterowania silnika elektrycznego przy jednym kierunku obrotu. Co to redundancja?
Wykreśl charakterystyki dla G(s)=2/(0,1s+1)
Wyznacz rzeczywistą wartość z błędem <3% wektora wzmocnienia elementów G(s)=2/(s+1) dla ωs=1. Narysować wektor, określić długość i kąt. Sygnał wejścia x(t)=3sint Nie wiem jak wyznaczyć tą rzeczywistą wartość z błędem 3%.
Wykreśl komplet charakterystyk G(s)=2/s. Podać charakterystyczne wartości.
Określić dla jakich k układ jest stabilny?
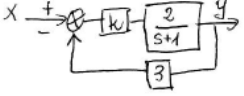
Określić amplitudę drgań
ZESTAW 6
Przedstawić komplet charakterystyk z wartościami liczbowymi
I G(s)=2(1+s) , II G(s)=10(1+1/s)
Układ mocy i sterowania dla:
I dwa kierunki obrotów, II impulsowy o jednym kierunku wirowania
Określ sygnał ustalony wyjścia, jeśli:
I x(t)=7sin10t + 2sint 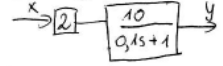
II x(t)=3sin0,1t + 5sin100t 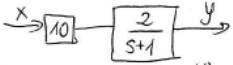
Przedstawić UAR (widok/układ półtechniczny) z regulatorem I lub regulatorem PI. Określić przebieg y(t) przy skoku jednostkowym zakłócenia.
Określić stabilność układu G(s)=10/(s2+3s+2)
Podać przebiegi czasowe rozwiązań cząstkowych.
Określić amplitudę drgań, jeśli:
Wyszukiwarka
Podobne podstrony:
autom pytania termin1, Elektrotechnika, Rok 2, Automatyka
pytania elektronika cw2, Automatyka i Robotyka PK, II rok, elektronika, Pytania do kolosów
pytania elektronika cw5, Automatyka i Robotyka PK, II rok, elektronika, Pytania do kolosów
Zbior pytan z AUTOM, Elektrotechnika, Rok 2, Automatyka
analogi 2 zaliczenie pytania, Elektronika i telekomunikacja-studia, rok II, semIV, ua2, Zaliczenie,
Kolokwium LSK - pytania (2), Elektronika i telekomunikacja-studia, rok II, 2 rok-aguli, lsk, Kolokwi
Naped elektryczny pytania cz I, Elektrotechnika, Rok 3, Napęd elektryczny, Napęd elektryczny wykład
Elka-pytania, Studia, Rok I, Elektro, egzamin z elektry 2
puszki koło 4-pytania, weterynaria, 5 rok semestr 2, puszki
Psychologia- pytania, 1.Lekarski, I rok, Psychologia, Wykłady, Psychologia
anapaty pytania 2 koło pytania, Weterynaria rok 3, Anatomia patologiczna, 1 semestr, Semestr 1
Pytania z kolosów, 3 rok, Alkohole
grupa 1clostridia, studia, 3 rok, Mikrobiologia, pytania, testy, ROK AKADEMICKI 2005-2006, MEDYCYNA
pytania zacho V rok, stomatologia zachowawcza, zachowawcza
Zadanie 3(1), Elektrotechnika, Rok 3, Napęd elektryczny, Napęd elektryczny wykład
Pytania na komisyjny sprawdzian, studia, 3 rok, Mikrobiologia, pytania, testy, ROK AKADEMICKI 2005-2
Silnikkrok, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
grupa 6, studia, 3 rok, Mikrobiologia, pytania, testy, ROK AKADEMICKI 2005-2006, MEDYCYNA 2005-2006
więcej podobnych podstron