Ćwiczenie nr 4
MODELOWANIE ANALOGOWE I
Laboratorium Automatyki i Sterowania
Zakład Energoelektroniki i Sterowania
Cel ćwiczenia.
Celem ćwiczenia jest poznanie właściwości nieliniowych wykorzystywanego w ćwiczeniu modelu, tzn. sumatora, integratora sterowanego oraz układu mnożącego.
2.Modelowanie analogowe - wprowadzenie teoretyczne
Poznawanie właściwości nieznanego układu może odbywać się różnymi metodami. Możemy badać zależności sygnałów wyjściowych od sygnałów podanych na wejście. W układach dynamicznych bada się odpowiedzi na wymuszenia skokowe, impulsowe albo sinusoidalne. Jeżeli charakterystykę wejście-wyjście badanego układu możemy porównać do charakterystyki innego, lecz znanego nam układu, to mówi się, że jest on modelem układu, który badamy. Innym sposobem badania jest tzw. modelowanie matematyczne. Polega ono na „ wniknięciu „ w strukturę układu i stworzeniu opisu matematycznego za pomocą równań różniczkowych, transmitancji itp. Model matematyczny jest dokładniejszy niż opis w postaci charakterystyk wejście - wyjście, stąd opis charakterystyk będzie miał funkcję pomocniczą podczas formułowania modelu matematycznego.
Modelowanie jest techniką poznawania właściwości układów polegającą na odwzorowaniu badanego układu fizycznego za pomocą układu uproszczonego, tzw. modelu. Wnioski otrzymane po zbadaniu modelu zastosujemy następnie do rzeczywistego układu. Modelowanie analogowe to takie, w którym występuje analogia pomiędzy przebiegami czasowymi w modelu, a przebiegami czasowymi w układzie pierwotnym. Model jest znacznie bardziej elastyczny od badanego układu, w modelu można zmieniać parametry w szerokich granicach, analizować ich wartości graniczne lub optymalne. Wszystkie przebiegi i wielkości są w modelu łatwo dostępne, a sam model można zrealizować w innej, dogodniejszej niż układ pierwotny skali wielkości.
Metody analityczne badania dynamiki układów regulacji automatycznej ( tzn. stabilności, dokładności itp. ) są proste i skuteczne jedynie dla układów liniowych niższych rzędów. Określenie na drodze analitycznej zachowania się układów wyższych rzędów jest trudne lub w ogóle niemożliwe. Często jest również niemożliwe osiągnięcie dużej dokładności obliczeń. Badanie zachowania się układów wyższych rzędów najłatwiej odbywa się metodami symulacyjnymi. Te metody badania dynamiki układów polegają na skojarzeniu teorii układów z modelami, które zastępują człony rzeczywiste. Symulacja polega na odwzorowaniu badanego układu fizycznego na modelu opisanym tymi samymi równaniami matematycznymi. Istota modelowania polega na tym, że statykę i dynamikę skomplikowanego układu ( w zasadzie dowolnej mocy ) można poznać za pomocą stosunkowo prostego i elastycznego modelu o „ małej mocy „ . Model umożliwia zmiany parametrów układów regulacyjnych oraz analizę wpływu nastaw regulatorów na dynamikę badanego układu pod kątem dobrania najkorzystniejszych warunków pracy. Ma to ogromny wpływ na dobór nastaw granicznych lub optymalnych. Do modelowania układów dynamicznych służą odpowiednio zbudowane układy, w których najważniejszym elementem jest wzmacniacz operacyjny. Jest to odwracający fazę wzmacniacz prądu stałego o bardzo dużym współczynniku wzmocnienia ( rzędu 108 ) ze specjalnie dobranym obwodem wejściowym i obwodem sprzężenia zwrotnego. Wzmacniacz operacyjny powinien charakteryzować się dużą rezystancją wejściową ( nie pobiera prądu wejściowego ), niewielką rezystancję wyjściową ( napięcie wyjściowe nie zależy od obciążenia ) i niezależnością parametrów od temperatury, napięcie zasilania i czasu obliczeń ( małe pełzanie zera, szerokie pasmo częstotliwości, itp.).Zaletą tych urządzeń są :
- proste programowanie oraz obsługa
- łatwe obserwowanie i dostęp do wszystkich przebiegów
- rejestracja i odczyt analogowy badanych przebiegów
- możliwość ciągłej zmiany parametrów modelu
- możliwość bezpośredniego włączenia w układ regulacji
- stosunkowo niski koszt
Cechami charakterystycznymi układów analogowych jest ciągły, niesekwencyjny przebieg operacji matematycznych na ciągłych wielkościach fizycznych. Ponieważ są to układy elektroniczne, modelowane wielkości fizyczne są przedstawiane w postaci przebiegów napięć. Istnieje możliwość modelowania w innej niż układ rzeczywisty skali wielkości, jak również zmienionej skali czasu. Rozwiązanie zadań otrzymuje się w przypadku modelowania analogowego w postaci wykresów funkcji, będącej rozwiązaniem równania różniczkowego, opisującego badany układ, ale można również otrzymać inne wykresy, np.: tory na płaszczyźnie fazowej lub wykresy pochodnych sygnałów. Badanie dynamiki układów można przeprowadzać różnymi sposobami, a mianowicie przez:
- odwzorowanie strukturalne, w którym modeluje się oddzielnie kolejne bloki układu rzeczywistego i łączy się poszczególne modele tak jak połączone są bloki układu rzeczywistego. Poszczególne elementy modelu odpowiadają wtedy funkcjonalnie odpowiednim blokom układu.
- odwzorowanie matematyczne, w którym modeluje się równania różniczkowe opisujące zachowania się układu rzeczywistego. Przebiegi dynamiczne w modelu odpowiadają wtedy przebiegom zmiennych, występujących w równaniu. Dla potrzeb automatyki bardziej przydatne jest modelowanie strukturalne ze względu na możliwość bezpośredniej analizy i interpretacji fizykalnej uzyskanych przebiegów sygnałów.
Modelowanie układów sprowadza się do realizacji szeregu prostych operacji typu:
mnożenie przez stały współczynnik
sumowanie dwóch lub więcej zmiennych
całkowanie
mnożenie dwóch zmiennych
tworzenie funkcji zmiennej
3. Układ ćwiczenia
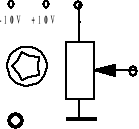
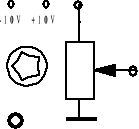
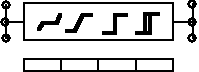
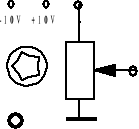
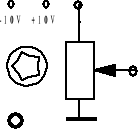
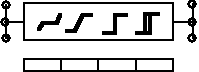
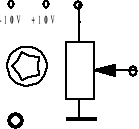
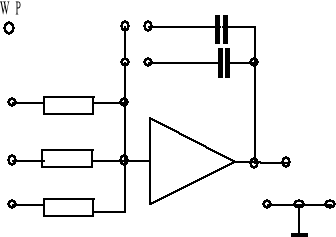
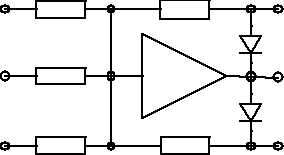
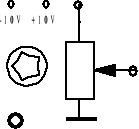
Schemat płyty czołowej modelu laboratoryjnego pokazano na rysunku poniżej. Płyta czołowa stanowi tablicę połączeniową członów analogowych oznaczonych schematycznie wraz z odpowiednimi punktami. Tablica jest podzielona na 5 pól pionowych: w pierwszym są potencjometry i źródła napięcia odniesienia, w drugim sumatory, w trzecim integratory, w czwartym człony nieliniowe, w piątym układ sterowania. Wartości elementów operacyjnych sumatorów i integratorów są wyrażone w jednostkach względnych, takich, że iloczyn rezystancji i pojemności ma wymiar sekund. Integratory mają po dwa kondensatory łączone ręcznie (zmiana skali czasu) oraz wejście WP do wprowadzania warunków początkowych.
Brak połączenia kondensatora w integratorze powoduje otrzymanie komparatora (wzmacniacza z otwartą pętlą sprzężenia zwrotnego). Człony nieliniowe 2 i 3 z kolumny 4 w ćwiczeniu nie są używane.
W polu układu sterowania znajduje się miernik o zakresie +10 V (jest to zakres poprawnej pracy całego układu, przy czym nie ma sygnalizacji przesterowania członów ). Poniżej miernika znajdują zaciski stanowiące „układ adresowy”, pozwalające łatwo wybrać punkty pomiarowe poszczególnych członów. Potencjometry mają wspólny zacisk (POT), na którym można odczytać współczynnik ustawienia danego potencjometru na skali od 0 do +10 V po wciśnięciu odpowiedniego przycisku obok sprawdzanego potencjometru.
POT. |
SUM. |
INT. |
NIEL. |
|
1
|
|
1
|
1
|
|
2
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
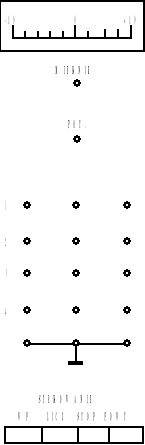
Rys.1. Schemat płyty czołowej modelu laboratoryjnego
Właściwe sterowanie modelu jest możliwe za pośrednictwem czterech przycisków: WP - stan wprowadzania warunków początkowych, LICZ - rozwiązanie , STOP - zatrzymanie rozwiązania, POWT - rozwiązanie powtarzalne w rytmie ok. 2,5 s. Przyciski sterujące oddziałują tylko na integratory, pozostałe człony działają tak samo bez względu na stan sterowania. Do orientacyjnego sprawdzenia zadania połączonego na tablicy wystarcza wbudowany miernik. Pełna analiza wyników wymaga zewnętrznych mierników oraz źródeł zasilania. W przypadku stosowania integratora wyniki należy zapisać przy pomocy rejestratora.
Pomiary
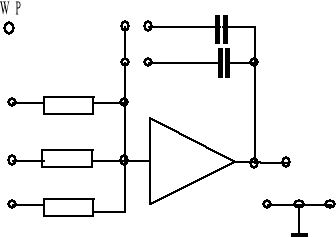
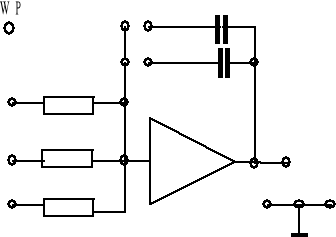
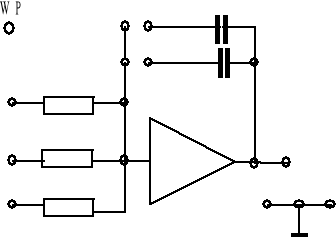
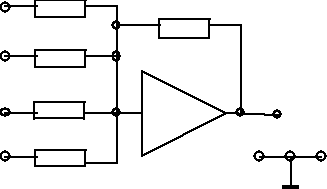
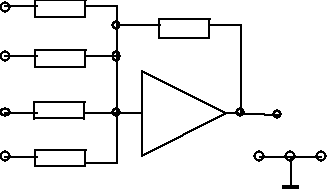
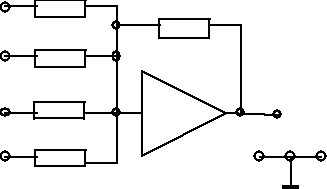
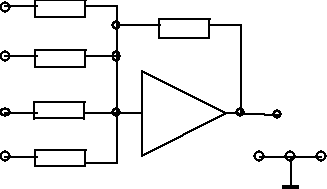
4.1.Badanie układu sumatora
Podając napięcie z zasilania wewnętrznego oraz zewnętrznego na odpowiednim wejściu ( również z wykorzystaniem mnożnika) mierzymy wielkość napięcia wyjściowego.
Schemat układu sumującego
Tabela 1
lp. |
U1 |
U2 |
U3 wyj. |
1 2 3 4 5 6 7 8 9 10 |
|
|
|
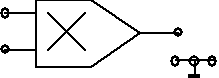
4.2 Badanie członu mnożącego, na wejście podajemy dwa sygnały napięciowe i mierzymy napięcie wyjściowe,
Badanie integratora, należy wprowadzić warunki początkowe (gniazdo WP ), wybrać kondensator oraz podać sygnał wejściowy. Po wciśnięciu przycisku LICZ otrzymujemy odpowiedź na wyjściu którą należy zapisać przy pomocy rejestratora.
5.Sprawozdanie.
Sprawozdanie powinno zawierać:
schematy układów pomiarowych,
wyniki w postaci wykresów dla sumatora i integratora(na wykresach nanieść odpowiednio oś czasu oraz napięcia),
wyznaczyć wartości stałych czasowych dla zarejestrowanych przebiegów,
tabele z wynikami pomiarów.
1
1
0,1
0,1
1
Wej.3
Wej.4
Wej.2
Wej.1
Wyszukiwarka
Podobne podstrony:
Regulacja ekstremalna nr3, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Ident. obiektu dynamicznego nr2, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Pytania indukc synchroniczne, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Ogranicznik amplitudy, UTP Bydgoszcz Elektrotechnika, IV semestr, energoelektronika
Badanie układów trójfazowych symetrycznych, UTP Bydgoszcz Elektrotechnika, II semestr
dławik, UTP Bydgoszcz Elektrotechnika, III semestr, teoria obwodów laborka
maruszczak, UTP Bydgoszcz Elektrotechnika, III semestr, projekt teoria obwodów maruszczak
Symulacyjna analiza widmowa czwórników pasywnych, UTP Bydgoszcz Elektrotechnika, III semestr, teoria
sprawozdanie 1 (grupa B), UTP Bydgoszcz Elektrotechnika, II semestr
sprawozdanie5, UTP Bydgoszcz Elektrotechnika, II semestr
trojfazowy niesymetryczny1, UTP Bydgoszcz Elektrotechnika, III semestr, teoria obwodów laborka
madziara2, Budownictwo UTP, II rok, IV semestr, Instalacje, instalacje, sanit, Instalacje budowlane,
Zakres badan JEE, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Automaty tokarskie, UTP Bydgoszcz - Transport, III semestr, Techniki wytwarzania
Tabela obliczania zapotrzebowania na ciepło - madziara, Budownictwo UTP, II rok, IV semestr, Instala
Jakość energii elektrycznej wstep, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Instytut Energetyki Jakosc i niezawodnosc, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Tabela zest. wsp. U cz1, Budownictwo UTP, II rok, IV semestr, Instalacje, instalacje, sanit, Instala
więcej podobnych podstron