Laboratorium
Elektrotechnika i Elektromechanika
Temat: Symulator silnika wykonawczego
prądu stałego.
Automatyka i Robotyka sem III
Grupa 5, sekcja 1
Data odbycia ćwiczenia: 14.01.2010
Bacior Łukasz
Botor Marcin
Czempiel Łukasz
Czerwiński Łukasz
Kokot Damian
Krauze Piotr
Legierski Michał
Morawiec Grzegorz
Mudry Maciej
Salamon Bartłomiej
Spek Damian
Sznapka Piotr
Wyroba Mateusz
Wstęp teoretyczny
Do naszej dyspozycji oddano Symulator SWPS , oraz podłączony do niego SWPS.
Silnik był potrzebny do wyznaczenia charakterystyki prędkości kątowej od szerokości impulsu. Dla reszty funkcji symulator korzystał z 2 modeli matematycznych: modelu SWPS oraz modelu PTPS.
Schemat ideowy stanowiska:
Symulator posiadał posiadał następujące możliwości:
1)Dla obiektu rzeczywistego:
Sterowanie silnikiem
Dla SWPS:
Sterowanie twornikowe, stan ustalony, charakterystyka regulacyjna wr = f(U2).
Sterowanie twornikowe, stan ustalony, charakterystyka mechaniczna Me= f(wr).
Sterowanie biegunowe, stan ustalony, charakterystyka regulacyjna wr = f(U1).
Sterowanie biegunowe, stan ustalony, charakterystyka mechaniczna Me= f(wr).
Sterowanie twornikowe, stan nieustalony
Odpowiedź na skok jednostkowy jak dla elementu inercyjnego pierwszego rzędu.
Odpowiedź na skok jednostkowy jak dla elementu całkującego z inercją pierwszego rzędu.
Sterowanie biegunowe stan nieustalony
Odpowiedź na skok jednostkowy.
Wizualizacja SWPS
3)Dla PTPS
Charakterystyka stanu ustalonego.
Z pominięciem oddziaływania twornika i rezystancji przejściowej.
Z uwzględnieniem oddziaływania twornika.
Z uwzględnieniem rezystancji przejściowej.
Z uwzględnieniem oddziaływania twornika i rezystancji przejściowej.
Charakterystyka stanu nieustalonego.
Odpowiedź na skok jednostkowy jak dla elementu inercyjnego pierwszego rzędu.
Odpowiedź na skok jednostkowy jak dla elementu różniczkującego.
Dzięki symulatorowi jesteśmy w stanie zbadać właściwości SWPS i PTPS, nie narażając
ich jednocześnie na uszkodzenie spowodowane np. przyłożeniem zbyt wysokiego napięcia. Pozwala nam on również na sprawdzenie dokładności modeli matematycznych. Wyniki otrzymane z pomocą symulatora możemy porównać z wynikami otrzymanymi, przy testowaniu prawdziwych przetworników.
Cel ćwiczenia
Celem tego ćwiczenia laboratoryjnego było rozwiązanie zadanych przez prowadzącego zadań na podstawie wyników uzyskanych z symulatora silnika wykonawczego prądu stałego.
3. Wyniki pomiarów
Zadanie 1.
Rozruch |
Hamowanie |
||
Szerokość impulsu |
ωr [obr/sek] |
Szerokość impulsu |
ωr [obr/sek] |
34 |
120 |
100 |
2430 |
36 |
210 |
96 |
2400 |
44 |
480 |
84 |
2400 |
51 |
750 |
61 |
1170 |
68 |
1350 |
53 |
1110 |
81 |
1830 |
51 |
930 |
87 |
2070 |
47 |
780 |
92 |
2280 |
44 |
540 |
95 |
2370 |
40 |
510 |
100 |
2430 |
37 |
330 |
|
|
33 |
90 |
|
|
30 |
0 |
Zadanie 2.
U2 [V] |
ωr [obr/sek] |
||
|
Me = 0 [Nm] |
Me = 0,5[Nm] |
Me = 1 [Nm] |
0 |
0 |
-88 |
-176 |
5 |
10 |
-78 |
-166 |
10 |
20 |
-68 |
-156 |
15 |
30 |
-58 |
-146 |
20 |
40 |
-48 |
-136 |
25 |
50 |
-38 |
-126 |
30 |
60 |
-28 |
-116 |
35 |
70 |
-18 |
-106 |
40 |
80 |
-8 |
-96 |
45 |
90 |
2 |
-86 |
50 |
100 |
12 |
-76 |
55 |
110 |
22 |
-66 |
60 |
120 |
32 |
-56 |
65 |
130 |
42 |
-46 |
70 |
140 |
52 |
-36 |
75 |
150 |
62 |
-26 |
80 |
160 |
72 |
-16 |
85 |
170 |
82 |
-6 |
90 |
180 |
92 |
4 |
95 |
190 |
102 |
14 |
99 |
198 |
110 |
22 |
Zadanie 3.
ωr [obr/sek] |
Me [Nm] |
||
|
U2 = 50 [V] |
U2 = 100 [V] |
U2 = 150 [V] |
0 |
5,7 |
11,4 |
17 |
5 |
2,8 |
8,5 |
14,2 |
10 |
0 |
5,7 |
11,4 |
15 |
-2,8 |
2,8 |
8,5 |
20 |
-5,7 |
0 |
5,7 |
25 |
-8,5 |
-2,8 |
2,8 |
30 |
-11,4 |
-5,7 |
0 |
35 |
-14,2 |
-8,5 |
-2,8 |
40 |
-17 |
-11,4 |
-5,7 |
45 |
-19,9 |
-14,2 |
-8,5 |
50 |
-22,7 |
-17,0 |
-11,4 |
55 |
-25,6 |
-19,9 |
-14,2 |
60 |
-28,4 |
-22,7 |
-17 |
65 |
-31,2 |
-25,6 |
-19,9 |
70 |
-34,1 |
-28,4 |
-22,7 |
75 |
-36,9 |
-31,2 |
-25,6 |
80 |
-39,8 |
-34,1 |
-28,4 |
85 |
-40,3 |
-36,9 |
-31,2 |
90 |
-45,5 |
-39,8 |
-34,1 |
95 |
-48,3 |
-42,6 |
-36,9 |
99 |
-50,6 |
-44,9 |
-39,2 |
Zadanie 4.
U1 [V] |
ωr [obr/sek] |
||||
|
Me= 0 [Nm] |
Me= 1 [Nm] |
Me= 2 [Nm] |
Me= 3 [Nm] |
Me= 4 [Nm] |
1 |
5000 |
-295000 |
-595000 |
-895000 |
-1195000 |
5 |
1000 |
-11000 |
-23000 |
-35000 |
-47000 |
9 |
555,6 |
-3148,1 |
-6851,9 |
-10555,6 |
-14259,3 |
13 |
384,6 |
-1390,5 |
-3165,7 |
-4940,8 |
-6716,0 |
17 |
294,1 |
-743,9 |
-1782,0 |
-2820,1 |
-3858,1 |
21 |
238,1 |
-442,2 |
-1122,4 |
-1802,7 |
-2483,0 |
25 |
200,0 |
-280,0 |
-760,0 |
-1240,0 |
-1720,0 |
29 |
172,4 |
-184,3 |
-541,0 |
-897,7 |
-1254,5 |
33 |
151,5 |
-124,0 |
-399,4 |
-674,6 |
-950,4 |
37 |
135,1 |
-84,0 |
-303,1 |
-522,3 |
-741,4 |
41 |
122,0 |
-56,5 |
-235,0 |
-413,4 |
-591,9 |
45 |
111,1 |
-37,0 |
-185,2 |
-333,3 |
-481,5 |
49 |
102,0 |
-22,9 |
-147,9 |
-272,8 |
-397,8 |
Zadanie 5.
ωr [obr/sek] |
Me [Nm] |
||||
|
U1 = 100[V] |
U1 = 125[V] |
U1 = 150[V] |
U1 = 175[V] |
U1 = 200[V] |
0 |
33,3 |
41,7 |
50 |
58,3 |
66,7 |
5 |
16,7 |
15,6 |
12,5 |
7,3 |
0 |
10 |
0 |
-10,4 |
-25 |
-43,8 |
-66,7 |
15 |
-16,7 |
-36,5 |
-62,5 |
-94,8 |
-133,3 |
20 |
-33,3 |
-62,5 |
-100 |
-145,8 |
-200,0 |
25 |
-50,0 |
-88,5 |
-137,5 |
-196,9 |
-266,7 |
30 |
-66,7 |
-114,6 |
-175,0 |
-247,9 |
-333,3 |
35 |
-83,3 |
-140,6 |
-212,5 |
-299,0 |
-400,0 |
40 |
-100,0 |
-166,7 |
-250,0 |
-350,0 |
-466,7 |
45 |
-116,7 |
-192,7 |
-287,5 |
-401,0 |
-533,3 |
49 |
-130,0 |
-213,5 |
-317,5 |
-441,9 |
-586,7 |
Zadanie 6.
T[s] |
Wr[Obr/s] |
J[Nmsek2] |
U2[V] |
R2[Ω] |
U1[V] |
R1[Ω] |
Lm[H] |
Mz[Nm] |
0 |
0,0 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
5 |
9,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
10 |
15,6 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
15 |
20,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
20 |
23,4 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
25 |
25,7 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
30 |
27,3 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
35 |
28,5 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
40 |
29,3 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
45 |
29,8 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
50 |
30,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
55 |
30,5 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
60 |
30,7 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
65 |
30,9 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
70 |
31,0 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
75 |
31,0 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
80 |
31,1 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
85 |
31,1 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
90 |
31,1 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
95 |
31,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
96 |
31,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
97 |
31,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
98 |
31,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
99 |
31,2 |
1,0 |
100 |
40 |
100 |
60 |
1,0 |
2,0 |
Zadanie 7.
t[s] |
wr[s-1] |
U1[V] |
R1[Ω] |
L1[H] |
Lm[H] |
J[Nm*sek2] |
wro [obr/sek] |
R2[Ω] |
i10 |
0 |
0,0 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
1 |
-0,8 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
2 |
-2,9 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
3 |
-5,7 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
4 |
-8,8 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
5 |
-11,9 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
6 |
-15,0 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
7 |
-18,0 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
8 |
-20,7 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
9 |
-23,2 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
10 |
-25,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
11 |
-27,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
12 |
-29,3 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
13 |
-30,8 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
14 |
-32,2 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
15 |
-33,4 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
16 |
-34,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
17 |
-35,4 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
18 |
-36,1 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
19 |
-36,8 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
20 |
-37,4 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
21 |
-37,9 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
22 |
-38,3 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
23 |
-38,7 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
24 |
-39,0 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
25 |
-39,3 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
26 |
-39,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
27 |
-39,7 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
28 |
-39,9 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
29 |
-40,0 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
30 |
-40,1 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
31 |
-40,2 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
32 |
-40,3 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
33 |
-40,4 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
34 |
-40,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
35 |
-40,5 |
35 |
15 |
50,0 |
0,2 |
0,2 |
70 |
20 |
400 |
Zadanie 8.
Wr[obr/sek] |
U2[V] |
R2[Ω] |
Fi1 |
C1 |
Robc[Ω] |
C2 |
I2 |
Rszcz[Ω] |
0 |
-16,5 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
7 |
-0,5 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
14 |
4,4 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
21 |
6,8 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
28 |
8,2 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
35 |
9,1 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
25 |
Wr[obr/sek] |
U2[V] |
R2[Ω] |
Fi1 |
C1 |
Robc[Ω] |
C2 |
I2 |
Rszcz[Ω] |
0 |
-38 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
7 |
3 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
14 |
7 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
21 |
9 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
28 |
10 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
35 |
11 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
30 |
Wr[obr/sek] |
U2[V] |
R2[Ω] |
Fi1 |
C1 |
Robc[Ω] |
C2 |
I2 |
Rszcz[Ω] |
0 |
-48 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
7 |
0 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
14 |
6 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
21 |
8 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
28 |
10 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
35 |
10 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
40 |
Wr[obr/sek] |
U2[V] |
R2[Ω] |
Fi1 |
C1 |
Robc[Ω] |
C2 |
I2 |
Rszcz[Ω] |
0 |
-59 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
7 |
-2 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
14 |
5 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
21 |
8 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
28 |
9 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
35 |
10 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
50 |
Wr[obr/sek] |
U2[V] |
R2[Ω] |
Fi1 |
C1 |
Robc[Ω] |
C2 |
I2 |
Rszcz[Ω] |
0 |
-117 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
7 |
-15 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
14 |
-2 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
21 |
3 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
28 |
5 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
35 |
7 |
28 |
0,8 |
5 |
34 |
2 |
2,0 |
100 |
Zadanie 9.
T[s] |
U2[V] |
U1[V] |
R1[Ω] |
Robc[Ω] |
L12[H] |
wr[obr/sek] |
R2[Ω] |
L2[H] |
0 |
0,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
1 |
41,3 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
2 |
59,9 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
3 |
68,2 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
4 |
71,9 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
5 |
73,6 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
6 |
74,4 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
7 |
74,7 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
8 |
74,9 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
9 |
74,9 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
10 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
11 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
12 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
13 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
14 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
15 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
16 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
17 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
18 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
19 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
20 |
75,0 |
40 |
40 |
30 |
2,0 |
50 |
10 |
50,0 |
4. Obliczenia i wykresy
Zadanie 1.
Naszym zadaniem było przeprowadzenie pomiaru prędkości dla różnych wartości szerokości impulsu i wyznaczenie charakterystyki ωr = f(SzerImp).
Stan ustalony silnika wykonawczego prądu stałego jest opisany za pomocą następujących równań:
Zadanie 2.
Naszym zadaniem było wyznaczenie zależności ωr = f (U2) , przy sterowaniu twornikowym, dla trzech różnych wartości momentów elektromagnetycznych Me.
Danymi w zadaniu były:
R1 = 400 [Ω] ; U1 = 100 [V] = const ; R2 = 44 [Ω] ; U2 = 0 - 100 [V] = var ; Lm = 2 [H]
Zależność ωr = f(U2) jest opisana wzorem:
Zadanie 3.
Tym razem naszym zadaniem było wyznaczenie zależności Me = f(ωr), przy sterowaniu twornikowym, dla trzech różnych wartości napięć twornika U2 oraz wyliczenie współczynnika tłumienia wewnętrznego D
Danymi w zadaniu były:
R1 = 400 [Ω] ; U1 = 100 [V] = const ; R2 = 44 [Ω] ; Lm = 20 [H]
Zależność Me = f(ωr) jest opisana wzorem:

Natomiast współczynnik tłumienia wewnętrznego :
I wynosi on : D = 0,56
Zadanie 4.
Kolejne nasze zadanie polegało na wyznaczeniu zależności ωr = f(U1), przy sterowaniu biegunowym, dla pięciu różnych wartości momentów elektromagnetycznych Me.
Danymi w zadaniu były wartości:
R1 = 100 [Ω] ; U1 = 50 [V] = var ; R2 = 30 [Ω], ; U2 = 50 [V] = const ; Lm = 1 [H]
Zależność ωr = f(U1) jest opisana wzorem:
![]()
Zadanie 5.
Celem tego zadania było wyznaczenie charakterystyki Me = f(ωr), przy sterowaniu biegunowym, dla pięciu różnych wartości napięć wzbudzenia U1.
Danymi w zadaniu były wielkości:
R1 = 100 [Ω] ; R2 = 30 [Ω] ; U2 = 100 [V] = const ; Lm = 10 [H]
Zależność Me = f(ωr) jest opisana wzorem:

Zadanie 6.
Naszym zadaniem było wyznaczenie elektromechanicznej stałej czasowej silnika przy sterowaniu twornikowym dla następujących danych:
U1=100 [V] ; 100 [V] ; R1=60 [Ω] ; R2=40 [Ω] ; L=1 [H] ; M=2 [Nm] ; J=1 [Nmsek2]
Wyliczone ze wzoru :Tm= 14,5
Zadanie 7.
Celem tego zadania było dobranie parametrów dla prądnicy tachometrycznej,
tak, aby na wykresie funkcji ωr(t), można było zauważyć obie stałe czasowe.
Związane z nimi styczne, oraz same wartości stałych wyznaczono graficznie.
Pierwsza stała czasowa ma w przybliżeniu wartość 1,7 [s], druga około 6[s].
Zadanie 8.
Celem zadania było zaobserwowanie wpływu rezystancji przejścia i oddziaływanie twornika na charakterystykę wyjściową prądnicy tachometrycznej.
Na podstawie danych z instrukcji oraz następujących wzorów wyznaczyliśmy zależność napięcia wyjściowego od prędkości kątowej, uwzględniając różne wartości rezystancji przejścia.
Erot = C1 .ωr .φ
Me = C2 .ωr .φ
Utw = Erot /(1 + (Rszcz/Robc))
Itw = Utw/Rszcz
Uwy = Erot - Itw .Robc
Rszcz |
Erot |
Me |
Utw |
Itw |
Uwy |
25 |
0 |
3,2 |
0 |
0 |
0 |
25 |
28 |
3,2 |
16,13559 |
0,645424 |
6,055593 |
25 |
56 |
3,2 |
32,27119 |
1,290847 |
12,11119 |
25 |
84 |
3,2 |
48,40678 |
1,936271 |
18,16678 |
25 |
112 |
3,2 |
64,54237 |
2,581695 |
24,22237 |
25 |
140 |
3,2 |
80,67797 |
3,227119 |
30,27797 |
25 |
172 |
3,2 |
99,11864 |
3,964746 |
37,19864 |
|
|
|
|
|
|
30 |
0 |
3,2 |
0 |
0 |
0 |
30 |
28 |
3,2 |
14,875 |
0,495833 |
11,14167 |
30 |
56 |
3,2 |
29,75 |
0,991667 |
22,28333 |
30 |
84 |
3,2 |
44,625 |
1,4875 |
33,425 |
30 |
112 |
3,2 |
59,5 |
1,983333 |
44,56667 |
30 |
140 |
3,2 |
74,375 |
2,479167 |
55,70833 |
|
|
|
|
|
|
40 |
0 |
3,2 |
0 |
0 |
0 |
40 |
28 |
3,2 |
12,86486 |
0,321622 |
17,06486 |
40 |
56 |
3,2 |
25,72973 |
0,643243 |
34,12973 |
40 |
84 |
3,2 |
38,59459 |
0,964865 |
51,19459 |
40 |
112 |
3,2 |
51,45946 |
1,286486 |
68,25946 |
40 |
140 |
3,2 |
64,32432 |
1,608108 |
85,32432 |
|
|
|
|
|
|
50 |
0 |
3,2 |
0 |
0 |
0 |
50 |
28 |
3,2 |
11,33333 |
0,226667 |
20,29333 |
50 |
56 |
3,2 |
22,66667 |
0,453333 |
40,58667 |
50 |
84 |
3,2 |
34 |
0,68 |
60,88 |
50 |
112 |
3,2 |
45,33333 |
0,906667 |
81,17333 |
50 |
140 |
3,2 |
56,66667 |
1,133333 |
101,4667 |
|
|
|
|
|
|
100 |
0 |
3,2 |
0 |
0 |
0 |
100 |
28 |
3,2 |
7,104478 |
0,071045 |
25,58448 |
100 |
56 |
3,2 |
14,20896 |
0,14209 |
51,16896 |
100 |
84 |
3,2 |
21,31343 |
0,213134 |
76,75343 |
100 |
112 |
3,2 |
28,41791 |
0,284179 |
102,3379 |
100 |
140 |
3,2 |
35,52239 |
0,355224 |
127,9224 |
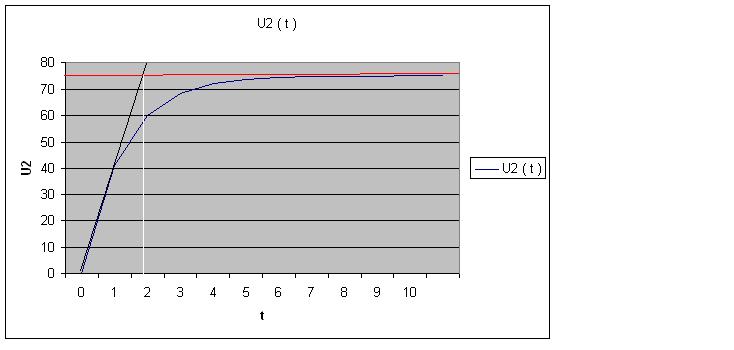
Zadanie 9.
Celem zadania było, dla zadanych parametrów wyznaczenie stałej czasowej. Wyznaczyliśmy ją metodą graficzną, prowadząc styczną do wykresy z jego początku.. Miejsce jej przecięcia z prostą mającą wartość stanu ustalonego , przyjęliśmy za stałą czasową. Jej wartość to ok. 2,4 [s].
5. Wnioski
Po wykonaniu zadania pierwszego zauważyliśmy że wirnik silnika został wprawiony w ruch, gdy szerokość impulsu wynosiła 34 jednostek, natomiast przestał się obracać gdy szerokości impulsu wynosiła 30 jednostek. Wnioskujemy więc, że wartość szerokości impulsu potrzebna do wprawienia silnika w ruch jest większa niż do utrzymania wirnika w ruchu.
Otrzymana charakterystyka ωr = f (SzerImp) po lekkim zaproksymowaniu ma charakter liniowy i jest funkcją rosnącą. Dopiero powyżej ok. 90 jednostek następuje mniejszy wzrost prędkości obrotowej. Wynika z tego, że wtedy prędkość obrotowa słabiej zależy od wartości szerokości impulsu.
Charakterystyki otrzymane po wykonaniu zadania drugiego mają charakter liniowy i są funkcjami rosnącymi. Dodatkowo parametr Me wpływa na te charakterystyki Gdy zwiększaliśmy jego wartość zauważyliśmy obniżanie się wykresu. Jednak współczynnik kierunkowy tych prostych nie uległ zmianie .
Charakterystyki Me = f(ωr) wyznaczone w zadaniu trzecim mają charakter liniowy i są to malejące. Ponadto gdy zwiększaliśmy parametr U2 powodowało to przesuwanie wykresu w górę. Po obliczeniu współczynnika tarcia wewnętrznego stwierdziliśmy że jest on równy tgα (gdzie α jest to kąt nachylenia prostej). Współczynnik ten jest niezależny od zmiennego parametru U2, dlatego też otrzymane wykresy są do siebie równoległe.
Gdy moment elektromagnetyczny zmniejszymy o połowę, napięcie twornika również musi zmniejszyć się o połowę, aby prędkość obrotowa również zmniejszyła się o połowę
Wynika to z tego, że jeżeli lewą stronę równania zmniejszymy o połowę, to prawą również,
a ponieważ po prawej stronie równania występują dwie wielkości zmienne ωr i U2 to dlatego obie te wielkości musimy zmniejszyć o połowę.
Charakterystyki ωr = f(U1) uzyskane w zadaniu czwartym mają charakter hiperboliczny, po analizie wykresu doszliśmy do kilku wniosków:
Charakterystyki te mają dwie asymptoty: pionową U1=0 oraz poziomą ωr=0
Dla Me=0 wykres zależności ωr = f(U1) maleje od +∝ do 0, natomiast dla Me≥1 wartości rosną od -∝ do 0
Im mniejsza jest wartość momentu elektromagnetycznego, tym mocniej nachylony jest wykres funkcji ωr = f(U1)
Charakterystyki Me = f(ωr) wyznaczone w zadaniu piątym są liniowe oraz malejące. wraz ze wzrostem napięcia wzbudzenia (U1) kąt nachylenia tych prostych względem osi ωr, ulega zwiększaniu.
Po wykonaniu zadania szóstego oraz analizie informacji uzyskanych na wykładach doszliśmy do wniosku iż moment zewnętrzny wpływa tylko na wielkość odpowiedzi w stanie ustalonym, nie wpływa on na elektromechaniczną stałą czasową czyli nie wpływa na własności dynamiczne.
Gdy rezystancja przejścia jest duża, w granicach 100[Ω], zależność napięcia wyjściowego od prędkości kątowej jest zbliżona do tej dla biegu jałowego. Wynika z tego że dla konkretnych wartości prędkości kątowej, napięcie wyjściowe przyjmuje maksymalne wartości, oraz że wraz ze spadkiem rezystancji przejścia, kolejne wartości napięcia wyjściowego maleją.
Uzyskane przez nas wyniki są prawdziwe dla idealnego silnika wykonawczego prądu stałego. Charakterystyki rzeczywistych silników wykonawczych prądu stałego mogą się różnić zwarzywszy na fakt iż w rzeczywistych maszynach istnieje rezystancja uzwojeń, występują strumienie rozproszenia oraz charakterystyki B = f(H) są nieliniowe. Tak więc uzyskane wyniki mogą być stosowane tylko jako przybliżenia rzeczywistych charakterystyk silników wykonawczych prądu stałego.
3
![]()