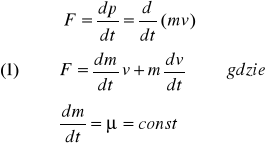
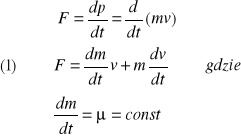
3.2. Zasady dynamiki dla układów o zmiennej masie.
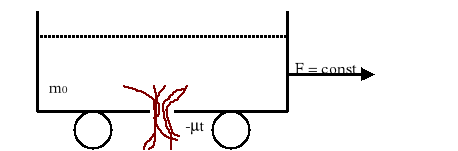
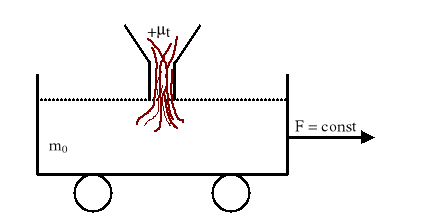
Przykład 1 - ruch wózka o rosnącej masie, pod wpływem stałej siły F.
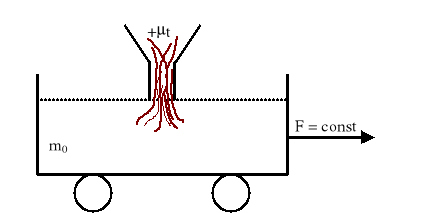
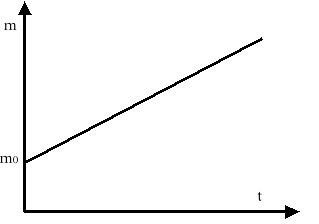
m0 - masa początkowa
![]()
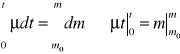
Podstawiając (1) do (2) otrzymujemy:
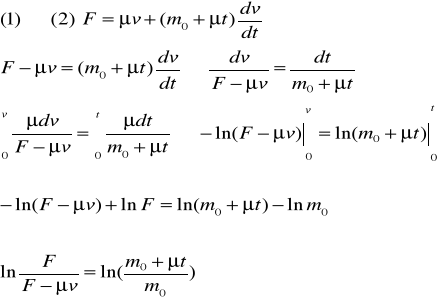
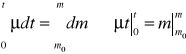
skąd:
![]()
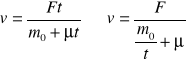
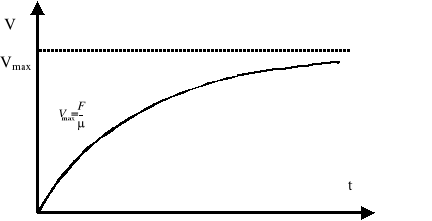
ostatecznie:
![]()
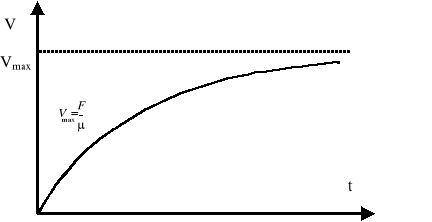
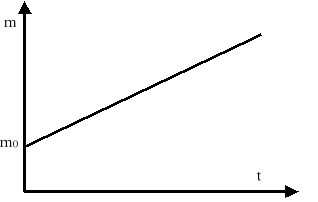
Zależność prędkości wózka od czasu
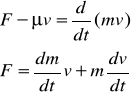
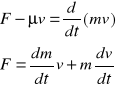
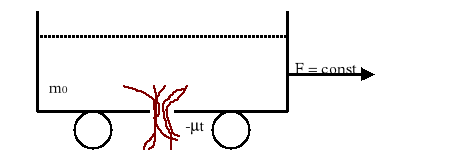
Przykład 2 - ruch wózka o malejącej masie. Działa stała siła zewnętrzna F.
![]()
jest to siła odrzutu pochodząca od wysypującego się piasku.
![]()
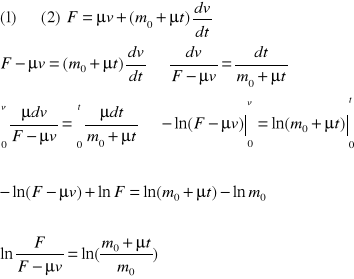
Podobnie jak w poprzednim przypadku:
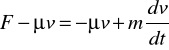
![]()
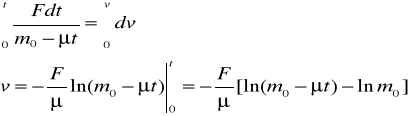
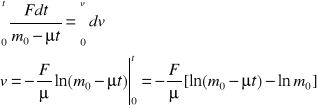
Ostatecznie:
![]()
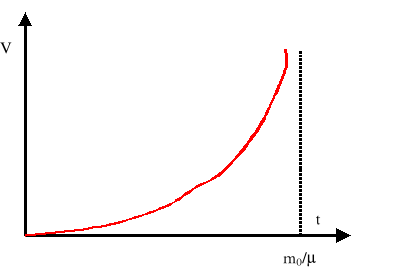
Zależność prędkości wózka od czasu, dla malejącej masy wózka
![]()
![]()
![]()
![]()
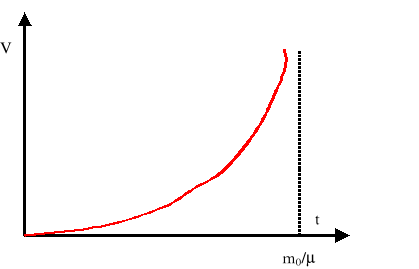
m0/μ
![]()
Zależność prędkości wózka od czasu.
Wyszukiwarka
Podobne podstrony:
4098
4098, W7 - inżynierii środowiska
4098
4098
4098
4098
4098 (SGS Thomson)
4098
LEXMARK Z31 4098
więcej podobnych podstron