Rok akademicki 1998/99 |
Laboratorium z fizyki |
|||
Nr ćwiczenia: 25 |
Temat: Rezonans mechaniczny. |
|||
I.Z.K. K06 |
ANDRZEJ SIUDA |
|||
Data wykonania |
Ocena |
Data zaliczenia |
Podpis |
|
7.01.99 |
T |
|
|
|
|
S |
|
|
|
Zasada pomiaru
W tym doświadczeniu należało wyznaczyć logarytmiczny dekrement tłumienia, czas relaksacji, współczynnik oporu oraz dobroć układu drgań tłumionych za pomocą przyrządu służącego do badania rezonansu mechanicznego składającego się z tarczy balansowej, sprężyny, ramienia, osi tarczy i podziałki. W doświadczeniu pierwszym mieliśmy do czynienia z drganiami tłumionymi, natomiast w doświadczeniu drugim do przyrządu dołączyliśmy elektromagnes oraz silnik, aby w ten sposób otrzymać drgania wymuszone.
Zmieniając amplitudę wychylenia tarczy balansowej, bądź zmieniając natężenie prądu w obwodzie elektromagnesu zmieniały się częstotliwości wychyleń tarczy przyrządu.
Drgania tłumione uzyskuje się dzięki zastosowaniu elektromagnesu, między biegunami którego przechodzi koło balansowe. Powstające prądy wirowe powodują hamowanie ruchu koła. Wychylenie tarczy oraz ramienia połączonego za pośrednictwem sprężyny z tarczą, można obserwować na tle skali.
Schemat układów pomiarowych
Schemat nr 1 - schemat silnika elektrycznego
Schemat nr 2 - Schemat elektromagnesu
Ocena dokładności pojedynczych pomiarów
W doświadczeniu stosowano urządzenia:
amperomierz (Z = 3000 mA, K = 0,5)
zasilacz regulowany
stoper.
Błąd odczytu amplitudy drgań przyjęto jako ΔA = ![]()
działki.
Błąd stopera jako Δt = 0,5 s.
Tabele pomiarowe
Doświadczenie nr 1.
Tabela nr 1. Dla I = 0A, N = 4
Lp. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
A0 |
9 |
9 |
9 |
7 |
7 |
7 |
5 |
5 |
5 |
An |
6,25 |
6 |
6,5 |
5 |
5 |
5 |
3 |
3 |
3 |
A4 |
6,25 |
5 |
3 |
||||||
t4 [s] |
5,12 |
5,19 |
5,34 |
5,34 |
5,47 |
5,34 |
5,41 |
5,37 |
5,6 |
t4 [s] |
5,22 |
5,38 |
5,46 |
||||||
T [s] |
1,305 |
1,345 |
1,365 |
||||||
δ |
0,091 |
0,084 |
0,128 |
||||||
τ [s] |
14,34 |
16,01 |
10,66 |
||||||
H |
4,88*10-4 |
4,37*10-4 |
6,56*10-4 |
||||||
Q |
69,04 |
74,79 |
49,07 |
||||||
Tabela nr 2. Dla I = 1,2A, N = 4
Lp. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
A0 |
9 |
9 |
9 |
7 |
7 |
7 |
5 |
5 |
5 |
An |
5,5 |
5,5 |
5,5 |
4,5 |
4,5 |
4,5 |
3 |
3 |
3 |
A4 |
5,5 |
4,5 |
3 |
||||||
t4 [s] |
5,4 |
5,32 |
5,31 |
5,63 |
5,43 |
5,44 |
5,44 |
5,33 |
5,5 |
t4 [s] |
5,34 |
5,5 |
5,49 |
||||||
T [s] |
1,335 |
1,375 |
1,372 |
||||||
δ |
0,123 |
0,11 |
0,128 |
||||||
τ [s] |
10,854 |
12,5 |
10,719 |
||||||
H |
6,45*10-4 |
5,6*10-4 |
6,53*10-4 |
||||||
Q |
51,08 |
57,12 |
49,09 |
||||||
Doświadczenie nr 2.
Tabela nr 3.
A |
1,5 |
3 |
6 |
7,5 |
9 |
7 |
2 |
1 |
t10 [s] |
21,84 |
17 |
14,97 |
14,47 |
14,19 |
13,54 |
11,57 |
10,16 |
T [s] |
2,184 |
1,7 |
1,497 |
1,447 |
1,419 |
1,354 |
1,157 |
1,016 |
ω |
2,875 |
3,694 |
4,195 |
4,34 |
4,426 |
4,638 |
5,428 |
6,181 |
Przykładowe obliczenia wyników pomiarów wielkości złożonej
Doświadczenie nr 1.
Dane dla Tabeli nr 1. Kolumna 1:
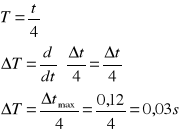
Okres drgań:
![]()
[s]
![]()
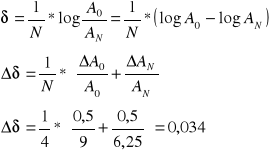
Logarytmiczny dekrement tłumienia:
![]()
![]()
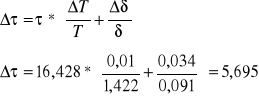
Czas relaksacji:
![]()
[s]
![]()
s
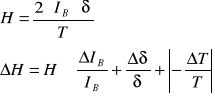
Współczynnik oporu:
![]()
IB = (35 ± 2) * 10-4 [kg*m2]
![]()
Dobroć układu:
![]()
![]()
Częstotliwość drgań:
![]()
![]()
Rachunek błędów
Aby obliczyć błąd czasu posłużono się błędem maksymalnym wyznaczonym spośród błędów przeciętnych.
Dla A0 = 9 obliczono:
![]()
![]()
![]()
![]()
Błąd okresu obliczono metodą różniczki zupełnej:
Błąd dekrementu tłumienia obliczono za pomocą różniczki zupełnej:
Błąd czasu relaksacji obliczono za pomocą różniczki logarytmicznej:
Błąd współczynnika oporu obliczono metodą różniczki logarytmicznej:

Błąd dobroci układu obliczono metodą różniczki logarytmicznej:

Doświadczenie nr 2.
Błąd stopera:
Δt = 0,5 s
Błąd okresu:

Zestawienie wyników pomiarów
Doświadczenie nr 1
Tabela nr 1 dla I = 0A, N=4
Lp. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
A0 |
9±0,5 |
7±0,5 |
5±0,5 |
||||||
A4 |
6,2±0,5 |
5±0,5 |
3±0,5 |
||||||
t4 [s] |
5,22±0,12 |
5,38±0,9 |
5,46±0,14 |
||||||
T [s] |
1,305±0,3 |
1,345±0,02 |
1,365±0,03 |
||||||
δ |
0,091±0,03 |
0,084±0,04 |
0,128±0,06 |
||||||
τ [s] |
14,34±5,69 |
16,01±8,47 |
10,66±5,85 |
||||||
H |
4,88*10-4±2,21 |
4,37*10-4±2,56 |
6,56*10-4±3,98 |
||||||
Q |
69,04±29 |
74,79±40,8 |
49,07±42,04 |
||||||
Tabela nr 2. Dla I = 1,2A, N = 4
Lp. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
A0 |
9±0,5 |
7±0,5 |
5±0,5 |
||||||
A4 |
5,5±0,5 |
4,5±0,5 |
3±0,5 |
||||||
t4 [s] |
5,34±0,08 |
5,5±0,13 |
5,49±0,16 |
||||||
T [s] |
1,335±0,02 |
1,375±0,03 |
1,372±0,04 |
||||||
δ |
0,123±0,03 |
0,11±0,05 |
0,128±0,07 |
||||||
τ [s] |
10,854±3,43 |
12,5±5,48 |
10,719±5,93 |
||||||
H |
6,45*10-4±2,41 |
5,6*10-4±2,78 |
6,53*10-4±3,98 |
||||||
Q |
51,08±44,37 |
57,12±56,57 |
49,09±42,88 |
||||||
Doświadczenie nr 2.
Tabela nr 3.
A |
1,5±0,5 |
3±0,5 |
6±0,5 |
7,5±0,5 |
9±0,5 |
7±0,5 |
2±0,5 |
1±0,5 |
t10 [s] |
21,8±0,5 |
17±0,5 |
14,9±0,5 |
14,4±0,5 |
14,2±0,5 |
13,5±0,5 |
11,6±0,5 |
10,2±0,5 |
T [s] |
2,2±0,05 |
1,7±0,05 |
1,5±0,05 |
1,5±0,05 |
1,5±0,05 |
1,4±0,05 |
1,6±0,05 |
1,2±0,05 |
ω |
2,87±0,03 |
3,69±0,09 |
4,19±0,01 |
4,34±0,04 |
4,4±0,01 |
4,6±0,03 |
5,4±0,02 |
6,2±0,01 |
Uwagi i wnioski
Zmieniając amplitudę wychylenia tarczy balansowej, bądź zmieniając natężenie prądu w obwodzie elektromagnesu zmieniały się częstotliwości wychyleń tarczy przyrządu.
Drgania tłumione uzyskuje się dzięki zastosowaniu elektromagnesu, między biegunami którego przechodzi koło balansowe. Powstające prądy wirowe powodują hamowanie ruchu koła. Wychylenie tarczy oraz ramienia połączonego za pośrednictwem sprężyny z tarczą, można obserwować na tle skali. Kiedy wzrastało natężenie prądu w obwodzie z elektromagnesem, wzrastało pole magnetyczne i częstotliwość wahnięć malała wraz z amplitudą. Nie były to jednak pomiary profesjonalne, gdyż korzystaliśmy ze sprzętu, który miał nam jedynie pokazać, że takie zjawiska zachodzą, a nie pomóc obliczyć je z doskonałą precyzją.
2
7
~ 220 V
Silnik
Elektromagnes
A
0 - 25 V
Wyszukiwarka
Podobne podstrony:
Fizyka 2, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
Wyklad16, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
41a, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki, Fizyk
spis sciaga, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika labork
Strona, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki, Fi
KAMILP~1, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
fiza egz2 v2, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika labor
Wyklad19, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
WYTLAC~1, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
Sprawozdanie fiz, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika l
PLASTC~1, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektronika laborki,
czasowniki niereguralne, 1 STUDIA - Informatyka Politechnika Koszalińska, muniol, I rok, Fiza-Elektr
więcej podobnych podstron