Displacement:
![]()
![]()
[T] ![]()
[m3]
-->
[Author:JAO]
ZANURZENIA
XF (LCB) - środek wyporu ![]()
[m] ![]()
[m] ![]()
[m]
XS (LCF) - środek geometryczny
Mj - jednostkowy moment przegłębiający
t - trym zgodny z t = TD - TR Zanurzenie na rufę ze znakiem „ - „
![]()
[m] ![]()
[m] ![]()
[m] ![]()
[m] ![]()
[m] 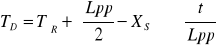
[m]
DRAFT SURVEY
Dane z tablic : D, TPC, XS, α, ΔMj = Mj(+0,5) - Mj(-0,5)
I metoda: pamiętaj: Xs od ⊗ II metoda: („wzór japoński”)
![]()
[m] ![]()
[m]
![]()
[t] ![]()
[m]
![]()
[t] ![]()
[m]
![]()
[t] ![]()
[t]
![]()
![]()
![]()
[t] 
[t]
![]()
[t] Uwaga! poprawka D4zawsze dodatnia
Zmiana stanu zabalastowania przyjmując minimalną ilość balastu
![]()
[t] ![]()
[m] t-> planowany trym ![]()
[t] x-planowane
lub![]()
[t]
Ile z pozycji x1 do pozycji x2 aby było „0” trymu: Aby spełnic ten warunek musi XG=XF
![]()
[t] ![]()
[t]
Metoda E-psylonów:
εDA εRA Zdjęcie z X1![]()
εDA εRA Przyjęcie na X2
Δt' = ∑εDA + ∑εRA
Rozmieszczenie końcówki ładunku na równą stępkę: Dane: D pocz. XG, XF: D'(końcowe) XF'; P=Dk-DP
![]()
[m] ![]()
[t] ![]()
[t] p1=p-p2
Rozmieszczenie ładunku dla t = 0
![]()
![]()
[t] ![]()
![]()
[t] ![]()
[tm] ![]()
[tm]
Inny sposób: D'XF'= DXG + p1x1 + p2x2
Albo załadować całość na jedną ładownię a potem część przesunąć:
![]()
[m] ![]()
[m] ![]()
[t]
Przyjęcie ciężaru: ![]()
Zmiana stanu zabalastowania: ![]()
[m] 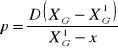
[t]
( t′ = x) zmiana trymu.
Przesunięcie ciężaru z X2 do X1:
![]()
[m] ![]()
[t]
PRZYJĘCIE CIĘŻARU: ZDJĘCIE CIĘŻARU:
![]()
[m] ![]()
[m]
Stateczność początkowa:
![]()
[tm] 
[°] ![]()
[tm] lub: ![]()
[tm]
Załadunek - wyładunek kontenerów: h = wysokość podnoszenia ładunku, z = środek podnoszenia ciężaru.
Liczyć: ![]()
[m] potem GMp, i z GMp liczymy M1° .następnie:
MPRZ = p ( b - y ) wyładunek, MPRZ = p ( y - b ) wyładunek,
Przyjęcie, zdjęcie ciężaru z kei:
Wyładunek załadunek przesunięcie masy
![]()
[t] ![]()
[t] ![]()
[m] ![]()
[m]
![]()
[m] ![]()
[FSM] ![]()
[°]
Cyrkulacja:
![]()

![]()
![]()
V (m/sek) = 0.514 ⋅V kt
![]()
[tm] ![]()
![]()
![]()
![]()
Cyrkulacja: kąt przechyłu przy którym woda wchodzi do................ h =m wysokość od pp do np.miejsca przebicia
![]()
[°] 
[tm] UWAGA! ZG niepoprawione!!
![]()
[tm] ![]()

![]()
[m] ![]()
[°] lub
![]()
[m] ramię cyrkulacji ![]()
[m]
Z tablic Lw; potem wykres statyczny , odcinamy Lhc i LwST i mamy ϕhc oraz ϕST gdzie LwST= 0,6 Lw
Przepisy PRS / IMO:![]()

![]()
Krzywa ramion prostujących: Max. ramię prostujące - wykres statyczny Kąt zalewania- z tablic>>>z zanurzenia lub wyporności; ![]()
, ![]()
(na przecięciu jest ϕPRZ
Dynamiczna: ![]()
[KN] MPRZ = MKR LwST = 0,6 Lw (tablice str.98)
Obliczanie pola błędu:![]()
Lw1=0,0514 Fw Zw (IMO +,5T) Lw2=1,5Lw1
Mielizna:
![]()
[m] ![]()
![]()
[m] 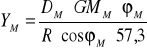
[m]
![]()

![]()
![]()
[m] ![]()
[m] ![]()
Liczenie:R, to,TXM, T'XM:
Awaria: Zanurzenie statku na wysokości zatopienia (uszkodzenia)
![]()
[m] ![]()
[m3]
![]()
[m]
Inny wzór do stosowania zamiennie: Pw=Daw - D
![]()
[m]
Wzór SIMPSONA (do ziarna)
![]()
[mrad] ![]()
![]()
![]()
Wzór na liczenie pola pod krzywą: S= S1 + S2 + S3 + S4 (trapezy)
![]()
![]()
![]()
![]()
![]()
lub:
![]()
GM z okresu kołysań: c = 0,373+0,023 ⋅B/T -0,043 L/100
![]()
[sek] 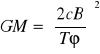
[m]
ZM (KM) - wysokość metacentrum poprzecznego ![]()
![]()
ZG - położenie środka masy nad p.p. ![]()
GM - wysokość metacentryczna
ΔGM (ΔZG) - poprawka na swobodne powierzchnie
PRZECHYŁY BOCZNE STATKU
![]()
[tm/°] ![]()
[°] ![]()
[°] ![]()
[tm]
Moment bezwładności dla trapezu:
![]()
![]()
![]()
TRAPEZ![]()
b1- węższy bok
Wyszukiwarka
Podobne podstrony:
Urządzenia nawigacyjne - Notatka do Kolokwium z wykładów, Akademia Morska, I semestr, urządzenia naw
Załącznik do podejścia 10, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nie kasować tego!!!
Materiały do zal BISS, Akademia Morska Szczecin Nawigacja, uczelnia, AM, BISSy, I sem
Tabela do ćw 4 wydymki, Akademia Morska, 2 rok', Semestr III, II rok Wydział Mech, Wytrzymałość Mate
Tab do opisu statku, Akademia Morska, MPDM
Stateczność - 4-10 - Zagadnienia do egzaminu, Akademia Morska, Stateczność - Wykłady
Pytania na zaliczenie BiSS Isem 2009 10, Nawigacja - Akademia Morska, Budowa i Stateczność Statku
Stateczność - 4-9 - Urządzenia przeciwprzechyłowe, Akademia Morska, Stateczność - Wykłady
Stateczność - 4-1 - Wstęp, Akademia Morska, Stateczność - Wykłady
STATECZNOŚĆ-III SEMESTR-ZALICZENIE WYKŁADÓW-SZOZDA, Akademia Morska Szczecin, SEMESTR I, BiSS
RATOWNICTWO-WZORY, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nie kasować tego!!!!!, Ściś
Załącznik do podejścia 6, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nie kasować tego!!!!
Załącznik do podejścia 5, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nie kasować tego!!!!
więcej podobnych podstron