DZIAŁANIE GPSu.
Na początku naszej pracy wypadałoby rozszyfrować ten popularny w dzisiejszych czasach termin. Mianowicie GPS jest to skrót pochodzący od pierwszych liter słów: GPS-NAVSTAR z języka angielskiego Global Positioning System - NAVigation Signal Timing And Ranking co oznacza w wolnym tłumaczeniu system nawigacji satelitarnej obejmujący całą kulę ziemską.
HISTORIA
Pojęcie sztucznego satelity pojawiło się po wystrzeleniu 4 października 1957 roku pierwszego Sputnika. Okrążał on Ziemię zaledwie przez kilka miesięcy, po czym spłonął w jonosferze. W 1958 roku wystrzelono amerykańskiego satelitę Explorer 1, oraz powołano organizację NASA (National Aeronautics and Space Administration), do dziś odgrywającą wielką rolę w badaniach nad wykorzystywaniem przestrzeni kosmicznej. Od tamtych wydarzeń wystrzelono w kosmos ponad 3 tysiące obiektów, których część nadal krąży wokół kuli ziemskiej. Obecnie bardzo trudno określić liczbę użytkowników systemów opartych na odbiorze sygnałów od sztucznych satelitów, szacuje się ją na 50 - 100 mln. Większość z nich korzysta z odbiorników systemu GPS (Global Positioning System) przetwarzających częstotliwość L1 z wykorzystaniem kodu C/A. Jego odpowiednikiem jest rosyjski system GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowa Sistiema), który w ciągu kilku ostatnich lat także przeszedł wiele istotnych zmian.
Prekursorem dzisiejszych satelitarnych systemów nawigacyjnych był system Transit (właściwie Navy Navigation Satellite System - NNSS), stworzony i rozwijany w latach 1958 - 1962 przez Laboratorium Fizyki Stosowanej (Applied Physics Laboratory - APL) Uniwersytetu Johnsa Hopkinsa. Transit był przez 35 lat (do 31 grudnia 1996) używany do dokładnej, niezależnej od pogody nawigacji morskiej. W roku 1967 został udostępniony użytkownikom cywilnym. Oprócz zastosowań nawigacyjnych, służył także jako pomoc geodezyjna i źródło częstotliwości wzorcowej. Do nawigacji lotniczej się nie nadawał, ze względu na długi czas pomiaru przy metodzie analizy częstotliwości Dopplera (wymagane było, aby średni czas oczekiwania na obserwację satelity nie przekraczał czterech godzin). Czas pomiaru wynosił od 6 do 18 minut. Oprócz tego przelicznik wymagał wprowadzenia danych o prędkości i wysokości anteny odbiorczej nad poziomem morza.
Kiedy 4 października 1957 wystrzelono pierwszego sztucznego satelitę Ziemi - Sputnika 1, w APL prowadzono nasłuch jego transmisji radiowych, nadawanych na częstotliwości 20 MHz, z zamiarem rozkodowania sygnałów telemetrycznych. Naukowcy zauważyli przy tym bardzo wyraźną "wędrówkę" częstotliwości sygnałów satelity. Szybko odkryto, iż jest to wynikiem efektu Dopplera, wywołanego ruchem satelity względem miejsca, skąd prowadzono nasłuch. Ku zdumieniu podsłuchiwaczy okazało się że Sputnik nie emituje żadnych sygnałów telemetrycznych, tylko prosty sygnał rozpoznawczy. Skupiono się zatem na obserwacji odchyleń częstotliwości sygnałów i wyliczaniu z nich parametrów lotu Sputnika. Po kilku dniach naukowcy z APL byli w stanie z dużym wyprzedzeniem informować wojskowe stacje obserwacyjne o porach przelotu Sputnika nad nimi.
Dla systemu Transit opracowano wiele nowych technologii, m.in. stabilizacji częstotliwości, synchronizacji odbiornika z zegarem satelity za pomocą danych efemerycznych, czy kontroli i korekcji działania układów nawigacyjnych satelity przez naziemne stacje kontrolne (sieć NAVSOC - Naval Satellite Operations Center). Pełna konstelacja satelitarna składała się z sześciu satelitów. Najpierw był to typ Oscar, później Nova i ulepszony Oscar - SOOS (Stacked Oscars On Scout), czyli dwa satelity Oscar wynoszone jedną rakietą Scout. Ostatnie dwa satelity konstelacji Transit, SOOS-4, zostały wysłane w sierpniu 1988. Satelity emitowały sygnały na częstotliwościach 150 MHz i 400 MHz. Ich dane były uaktualniane dwa razy dziennie, przy okazji odbioru danych telemetrycznych przez stacje kontrolne. Dokładność systemu była stopniowo polepszana od 900 m w roku 1962, 185 m w 1969, do 36 metrów w roku 1971. Ocenia się, że wyprodukowano około 80000 odbiorników nawigacyjnych i geodezyjnych systemu Transit.
W 1960 roku firma Raytheon skonstruowała system satelitarny MOSAIC (Mobile System for Accurate ICBM Control), przeznaczony do określania precyzyjnych koordynat ruchomych wyrzutni rakiet Minuteman. System nie został uruchomiony ze względu na przerwanie prac nad systemem rakietowym. W kwietniu 1964 roku został uruchomiony satelitarny system lokalizacyjny i nawigacyjny SECOR (Sequential Collation of Range), przeznaczony dla wojsk lądowych. Był to system zbliżony do Transita. Wystrzelono trzynaście satelitów 9ostatni w 1969 roku). W listopadzie 1967 roku ZSRR uruchomił pierwszego satelitę swojego systemu nawigacyjnego Cyklon (Kosmos-192). Z systemu Cyklon wywodzi się rosyjski ratowniczy system lokalizacyjny KOSPAS. W maju 1967 roku marynarka USA umieściła na orbicie pierwszego satelitę serii TIMATION. W Rosji opracowano i uruchomiono dwa systemy nawigacji satelitarnej, zbliżone koncepcyjnie do systemu Timation: wojskowy Cykada-M (6 satelitów, kryptonim Parus - żagiel) i cywilny Cykada (cztery satelity). Projekt TIMATION od 1973 roku połączony z projektem systemu USAF 621B dał początek projektowi DNSS (Defense Navigation Satellite System). Trzeci satelita DNSS był demonstratorem systemu GPS (Global Positioning System) Navstar. W projekcie tym brały udział wszystkie rodzaje wojsk USA (armia lądowa, marynarka wojenna, lotnictwo), a także służba kartograficzna DMA (Defense Mapping Agency) oraz prywatne firmy i ośrodki badawcze. Od początku lat osiemdziesiątych system GPS był stopniowo udostępniany autoryzowanym użytkownikom wojskowym w wersji PPS (Precision Positioning Service) z błędem wyznaczania pozycji poziomej wynoszącym mniej niż 10 m. Gdy system wykazał swoją efektywność, a wymiary i ceny odbiorników zmalały do akceptowalnych wartości (cena pierwszych odbiorników wynosiła ok. 125 tys. USD), użytkownicy cywilni zaczęli domagać się dostępu do systemu. Uruchomiono więc wersję ogólnodostępną SPS (Standard Positioning Service) z tzw. Ograniczonym Dostępem S/A (Selected Availability), w której błąd wyznaczania pozycji wynosił 500 m. Ze względu na dalszy wzrost zainteresowania systemem GPS, dokładność wersji SPS z ograniczonym dostępem S/A poprawiono, zmniejszając błąd wyznaczania pozycji do 100 m. Rozwój urządzeń elektronicznych sprawił, że producentom sprzętu udało się udoskonalić odbiorniki cywilne tak, iż dokładność ich działania osiągała poziom deklarowanej dokładności wersji PPS. Aby ominąć stosowane w wersji PPS szyfrowanie sygnałów uniemożliwiające ogółowi użytkowników korzystanie z wysokich dokładności systemu, opracowano koncepcje wersji różnicowej DGPS (Differential GPS), w której eliminowane są niektóre rodzaje błędów i celowo wprowadzane zakłócenia S/A. Po wprowadzeniu na orbity i uruchomieniu wszystkich planowanych satelitów systemu, dnia 27.04.1995 r. oficjalnie ogłoszono system GPS w pełni operacyjnym, to znaczy spełniającym wymagania podane w oficjalnych specyfikacjach systemu.
DZIAŁANIE GPSu.
No dobrze wiemy już co oznaczają tajemnicze 3 literki jaka jest ich historia, to może teraz zobrazujmy na czym polega działanie GPSu?
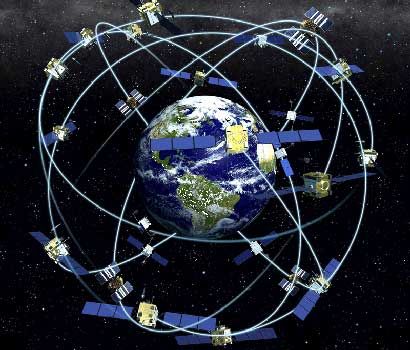
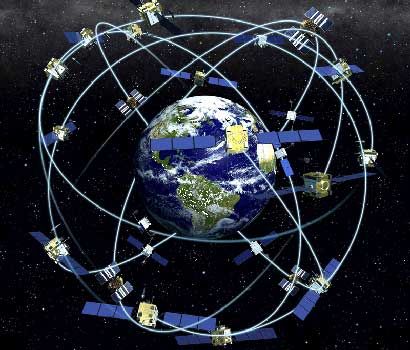
System GPS działa dzięki 24 satelitom. Po 4 satelity znajdujące się na każdej z 6 orbit poruszają się na wysokości ponad 20 tysięcy km. Wysokość ta pozwala na korzystanie z systemu GPS nie tylko odbiornikom zlokalizowanym na Ziemi, ale również sputnikom. Orbity, nachylone do płaszczyzny równika pod kątem 55 stopni „oplatają" całą Ziemię. Satelity jednokrotnie okrążają Ziemię w ciągu 12 h. Każda z satelit, podczas lotu dookoła globu emituje 50x/sek. sygnał na dwóch różnych częstotliwościach - L1 oraz L2. W cywilnej nawigacji satelitarnej zastosowanie znajduje częstotliwość L1. Pozycja odbiornika jest określana na podstawie różnicy czasów w których zostały wysłane dane z satelity. Przy odbiorze z trzech satelitów system jest w stanie określić położenie odbiornika z bardzo dużą dokładnością. Nowsze modele mają możliwość ostrzegania przed korkami ulicznymi czy o wysokości nad poziomem morza. Sygnał odbierany z trzech satelitów jest przekształcany przez odbiornik na obraz dwu wymiarowy "z lotu ptaka" Zdarza się jednak że cztery satelity wysyłają sygnał do jednego odbiornika, a wtedy mikroprocesor jest w stanie wygenerować obraz trójwymiarowy.
W JAKI SPOSÓB DOKONYWANY JEST POMIAR ?
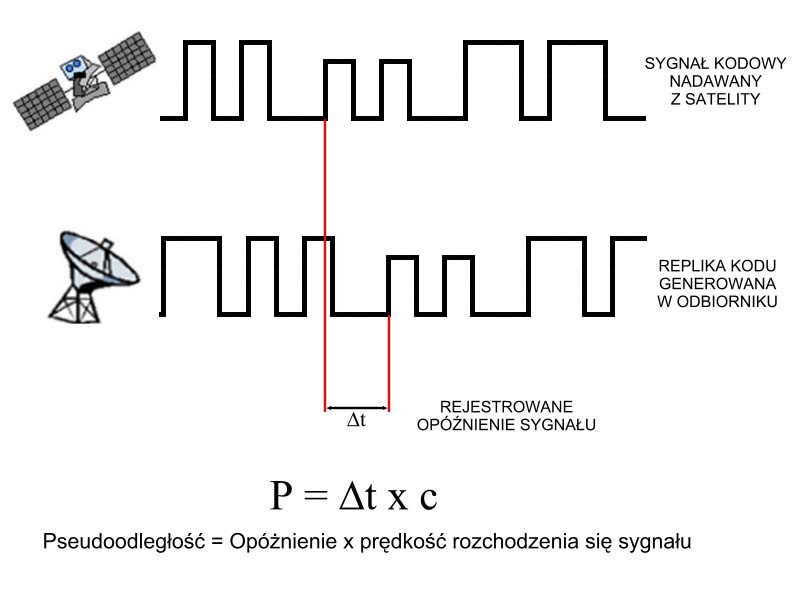
Metoda kodowa polega na dokładnym pomiarze czasu odbioru kodów C/A i P na jednej lub dwóch częstotliwościach L1 i L2.
Pomiar różnicy czasu pomiędzy momentem odbioru ramki a czasem jej nadania (zapisanym na początku każdej ramki) daje czas Δt przebiegu sygnału od satelity do odbiornika GPS (d = c · Δt). Dokładność tej metody jest rzędu pojedynczych metrów. Ze względu na duża wartość prędkości rozchodzenia się fali radiowej (bliska prędkości światła w próżni), duży wpływ na błędy pomiaru ma niedokładność wzorca czasu w odbiorniku. Do rozwiązania problemu 4 niewiadomych (x, y, z i t) konieczny jest pomiar 4 pseudoodległości (4 satelity). Współrzędne mogą być obliczone na każdą epokę niezależnie. Metoda ma zastosowanie kinematyczne (w nawigacji), gdzie współrzędne punktu zmieniają się z epoki na epokę (metoda fazowa nie daje takich możliwości, gdyż występuje wtedy więcej niewiadomych). W odbiornikach wojskowych wykorzystuje się pomiar różnic czasu w odbiorze ramek na częstotliwościach L1 i L2 w celu określenia tzw. poprawki jonosferycznej. Z powodu różnej prędkości rozchodzenia się fali radiowej, zależnej od ośrodka i częstotliwości, możliwe jest ustalenie różnicy czasu odbioru ramek na częstotliwościach L1 i L2 oraz obliczenie poprawki, która skompensuje błędy przy wyznaczaniu pseudoodległości. W odbiornikach cywilnych (które nie uwzględniają informacji zawartych na częstotliwości L2) możliwe jest wprowadzenie tej samej poprawki przy wykorzystaniu systemu DGPS. Rosnące możliwości procesorów oraz rozwój systemu GPS (zmiany polityki co do sygnałów oraz nowy sygnał L3) umożliwiają wykorzystanie technik ustalania pozycji zastrzeżonych wcześniej dla pomiarów stacjonarnych. Dzięki temu również cywilne urządzenia nawigacyjne zwiększają swoją dokładność do kilku-kilkunastu centymetrów.
Metoda fazowa polega na pomiarze różnicowym faz na jednej lub dwóch częstotliwościach L1 i L2. Jest to pomiar fazy sygnału przychodzącego φ.
d = Nλ + λφ
gdzie:
d - pseudoodległość,
N - całkowita liczba pełnych długości fal mieszczących się w odległości satelita - Ziemia,
λ - długość fali, na której pracuje,
φ - pomierzona faza sygnału przychodzącego.
Metoda fazowa jest dokładniejsza, dokładność rzędu kilku milimetrów, lecz posiada ona pewne wady, takie jak np. konieczność wyznaczenia nieoznaczoności fazy N (nazywane inicjalizacją odbiornika). Dopiero przy pomiarze do 4 satelitów dopiero dla 3 epok możliwe jest rozwiązanie (wyznaczenie pozycji) 12 obserwacji (12 długości do satelitów) i 10 niewiadomych. Niemożliwe są zastosowania kinematyczne, chyba że niewiadome nieoznaczoności fazy zostaną wyznaczone na początku pomiaru na podstawie metod statycznych i nie wystąpią utraty cykli. Jeśli zostanie utracona łączność z satelitą to na nowo musimy inicjalizować instrument (tzn. wyznaczać N). Niezbędne są szybkie metody inicjalizacji (np. On-The-Fly).Sygnał dociera do użytkownika na dwóch częstotliwościach nośnych f1 = 1575,42 MHz (długość fali 19,029 cm) i f2 = 1227,6 MHz (długość fali 24,421 cm). Porównanie różnicy faz obu sygnałów pozwala na dokładne wyznaczenie czasu propagacji, który ulega nieznacznym wahaniom w wyniku zmiennego wpływu jonosfery, ale nie umożliwia określenia współrzędnych. Użytkownicy cywilni przybliżoną poprawkę jonosferyczną otrzymują w depeszy nawigacyjnej lub dzięki systemowi DGPS. Identyfikacja satelitów oparta jest na metodzie podziału kodu CDMA (Code Division Multiple Access) oznacza to, że wszystkie satelity emitują na tych samych częstotliwościach, ale sygnały są modulowane różnymi kodami.
Odbiór sygnału bez zastosowania anten parabolicznych, które w tym przypadku są bezużyteczne ze względu na ich kierunkowość, wymaga zaawansowanych technik oddzielania sygnału od szumu i przetwarzania sygnału. Satelity są w ciągłym ruchu; wyznaczenie pozycji odbiornika na podstawie pomiaru tzw. pseudoodległości od kilku satelitów jest również złożonym zadaniem, wymagającym m.in. uwzględnienia spowolnienia upływu czasu w polu grawitacyjnym Ziemi. Dla poprawnej pracy systemu kluczowy jest czas. Każdy satelita jest wyposażony w zegar atomowy, dzięki czemu jego sygnał jest dokładnie zsynchronizowany z całym systemem. Jednocześnie satelity tworzą razem z kilkoma nadajnikami naziemnymi swoistą sieć korekcji czasu. W efekcie odbiornik GPS podaje nie tylko pozycje, ale również bardzo precyzyjny czas. Aby określić pozycję w trójwymiarowej przestrzeni i czas systemu konieczny jest jednoczesny odbiór z przynajmniej czterech satelitów. Odbiornik oblicza trzy pseudoodległości do satelitów oraz odchyłki czasu (różnicy między tanim i niedostatecznie dokładnym wzorcem kwarcowym zainstalowanym na odbiorniku i precyzyjnym zegarem atomowym na satelicie). Dokładne współrzędne satelity są transmitowane w depeszy nawigacyjnej. W przypadku możliwości odbioru tylko z trzech satelitów niektóre odbiorniki mogą pracować w trybie 2D z ustawioną przez użytkownika wysokością elipsoidalną.
BUDOWA SYSTEMU
System GPS składa się trzech fundamentalnych segmentów, których współpraca gwarantuje jego poprawne funkcjonowanie .
SEGMENT KOSMICZNY
Segment kosmiczny systemu GPS zmieniał się nieustannie, zarówno w liczbie operacyjnych satelitów, ich budowie, jak również w liczbie i parametrach orbit. Początkowa koncepcja (zatwierdzona w 1973 roku) zakładała liczbę 24 satelitów położonych na trzech orbitach kołowych, po 8 sztuk na każdej z nich. Kąt inklinacji i (nachylenia płaszczyzny orbity względem płaszczyzny równika) wynosił 63. Odległość pomiędzy orbitami w płaszczyźnie równika (różnice długości węzła wstępującego) wynosiła 120 długości geograficznej. Wysokość orbity założono na 20 335 kilometrów. Po kilku latach zmniejszono kąt inklinacji do 55, zwiększono liczbę orbit do 6 (każda licząca 4 satelity). Uległa zmianie także wysokość orbity, zmniejszono ją do 20 183 kilometrów. Wartość tę dobrano tak, aby czas jednego obiegu Ziemi przez satelitę wynosił połowę doby gwiazdowej: 11 h 57 min 58,3 s. Ze względów oszczędnościowych, w 1982 roku zredukowano zakładaną liczbę satelitów do 18. Miały być rozmieszczone równomiernie co 120 na 6 orbitach, oddalonych od siebie o 60 długości geograficznej w płaszczyźnie równika. Jednak zredukowanie liczby satelitów do 18 sprawiło, że w kilkunastu rejonach naszego globu liczba widocznych satelitów (powyżej dolnej granicznej wysokości topocentrycznej równej 5) wynosiła 4, a współczynnik GDOP przyjmował ogromne wręcz wartości, przekraczające 30 tysięcy. Ze względu na to, początkowo zaplanowano zwiększyć liczbę satelitów do 21, a w 1988 roku dodano jeszcze 3 satelity uzyskując liczbę 24. Koncepcja ta, zwana GPS 24, zakładała 6 orbit po 4 satelity. Kąt inklinacji i oraz oddalenie orbit w płaszczyźnie równika nie zmieniły się. W późniejszych latach liczba satelitów zwiększała się systematycznie, osiągając w 1998 roku liczbę 27. Zakładano, że system GPS składa się z 24 satelitów operacyjnych i n aktywnych satelitów rezerwowych. Obecnie (maj 2009 roku), segment kosmiczny systemu GPS składa się z 31 satelitów. Kąt inklinacji i wynosi 55 z odchyłką ±3, a wysokość orbity 20 183 kilometry. Rozmieszczenie orbit jest w miarę równomierne, różnice uśrednionych długości są bliskie 60.
Satelity należą do trzech bloków: 13 do bloku IIa, 12 do bloku IIR, oraz 6 do bloku IIR-M. Dla użytkowników nie ma istotnej różnicy pomiędzy satelitami bloków IIa i IIR. Emitują one sygnały na dwóch częstotliwościach: L1 = 1575,42 MHz i L2 = 1227,60 MHz. Sygnały L1 modulowane są kodem P - precyzyjnym, oraz kodem C/A - powszechnego dostępu, natomiast sygnały L2 modulowane są tylko kodem P. Odbiorniki dla użytkowników cywilnych mają możliwość odbioru sygnałów tylko na częstotliwości L1 i rozkodowują kod C/A, stąd nie mogą np. policzyć poprawki jonosferycznej (do jej wyznaczenia potrzeba sygnałów na dwóch częstotliwościach). W stosunku do bloku IIa, satelity bloku IIR mają m.in. zwiększoną autonomię działania, większą odporność na promieniowanie i możliwość przeprogramowania procesora. Dnia 26 września 2005 roku z przylądka Canaveral na Florydzie wystrzelono pierwszego satelitę bloku IIR-M. Jego sygnały na częstotliwościach L1 i L2, oprócz kodów takich jak w blokach IIa i IIR, modulowane są odpowiednio kodami M oraz M i C. Kod M dostępny jest tylko dla użytkowników wojskowych, natomiast kod C przeznaczony został dla użytkowników cywilnych. Dostęp do kodu C pozwala na pomiar pseudoodległości równocześnie na dwóch częstotliwościach, co umożliwia wyznaczenie poprawki jonosferycznej, poprawiając dokładność określanej pozycji. Jednak stanie się to możliwe, gdy liczba satelitów operacyjnych bloku IIR-M zapewni, że co najmniej 4 z nich będą widoczne w każdym momencie w dowolnym miejscu na Ziemi, uwzględniając wprowadzoną w odbiorniku dolną graniczną wysokość topocentryczną.
SEGMENT NAZIEMNY
Segment naziemny ma za zadanie kontrolować i dbać o prawidłowe funkcjonowanie całego systemu. Za jego funkcjonowanie odpowiada Departament Obrony Stanów Zjednoczonych. Szczególne zadania segmentu naziemnego to:
utrzymanie statusu i konfiguracji segmentu kosmicznego;
przygotowywanie i aktualizacja depeszy nawigacyjnej;
sprawdzanie docierających do użytkownika sygnałów nawigacyjnych (efemerydy, almanach, dane dotyczące czasu);
utrzymywanie systemów wspomagających.
W segmencie naziemnym systemu GPS można wyróżnić:
stację główną,
sieć stacji śledzących,
sieć stacji korygujących.
Stacja główna sprawuje kontrolę nad całością działania systemu. Położona jest w okolicach Colorado Springs, w Bazie Sił Powietrznych Stanów Zjednoczonych. Podlegają jej wszystkie pozostałe stacje. Plany rozbudowy segmentu naziemnego obejmują budowę drugiej stacji głównej w bazie Vanderberg w stanie Kalifornia.
Do sieci stacji śledzących (monitorujących) można zaliczyć 6 podlegających amerykańskim Siłom Powietrznym, położonych:
w Colorado Springs w stanie Colorado,
na Wyspie Wniebowstąpienia,
na Wyspie Diego Garcia,
na Wyspach Marschalla,
na wyspie O'ahu na Hawajach,
na przylądku Canaveral (Floryda).
W związku z planowanymi 20 stacjami śledzącymi w systemie Galileo, najpierw w 2005 roku sieć rozszerzono o 6 stacji leżących w:
Argentynie,
Australii,
Bahrajnie,
Ekwadorze,
USA (Waszyngton),
Wielkiej Brytanii, a w 2008 roku włączono kolejne trzy stacje, znajdujące się w:
Korei Południowej,
Nowej Zelandii,
USA (Alaska).
Głównym zadaniem stacji śledzących jest dokonywanie pomiarów pseudoodległości i fazy fali nośnej sygnałów odbieranych od wszystkich widocznych satelitów.
Stacje korygujące (zwane także uaktualniającymi) znajdują się w czterech z sześciu stacji śledzących, podlegających Amerykańskim Siłom Powietrznym, zlokalizowanych:
na Wyspie Wniebowstąpienia,
na Wyspie Diego Garcia,
na Wyspach Marschalla,
na przylądku Canaveral (Floryda).
Główne zadania stacji korygujących to przesyłanie: danych telemetrycznych, danych uaktualniających pamięć satelitów i komend dotyczących ich działania. Wszystkie zadania wykonywane przez stacje korygujące są rejestrowane, pozwalając na ich rekonstrukcję w razie awarii.
SEGMENT UŻYTKOWNIKA
Segment użytkownika w systemie GPS obejmuje wszystkie odbiorniki posiadane przez użytkowników. Odbiornik jest urządzeniem pasywnym. Odbiera on sygnały od satelitów, oraz od stacji referencyjnych podczas pracy w odmianie różnicowej. Wyznaczanie pozycji użytkownika w systemie GPS może odbywać się poprzez pomiar w odbiorniku:
fazy częstotliwości nośnej lub różnicy faz,
pseudoodległości (pomiar kodów),
różnicy pseudoodległości (zliczenie doplerowskie),
różnicy przesunięć sygnału z pomiarów interferencyjnych.
Wszystkie pomiary można podzielić na pomiary pseudoodległości i pomiary faz.
Zasada działania odbiornika nawigacyjnego opiera się na odbiorze sygnału, następnie następuje identyfikacja satelity nadającego. Przeprowadzana jest synchronizacja kodu odbieranego z satelity z kodem wytwarzanym przez lokalny oscylator. Umożliwia to pomiar czasu, potrzebnego do wyznaczenia pseudoodległości i rozkodowanie informacji przesyłanych przez danego satelitę. Uruchamiany jest układ zapewniający nieprzerwane śledzenie samego kodu i częstotliwości nośnej odbieranego sygnału. Ciągła znajomość pseudoodległości możliwa jest m.in. dzięki znajomości przesunięcia w czasie maksimum sygnału w układzie porównania obydwu kodów. Pozwala to na wyznaczenie współrzędnych pozycji anteny odbiornika.
BŁEDY I WADY SYSTEMU NAWIGACJI SATELITARNEJ.
Czy GPS posiada jakieś wady?
Otóż okazuje się że jest ich tak wiele, iż można podzielić ja na poszczególne podgrupy.
1. Błędy orbit satelitarnych ( perturbacje satelitarne ):
pole grawitacyjne Ziemi - Grawitacja, nazywana czasami ciążeniem powszechnym, to jedno z czterech oddziaływań podstawowych wyróżnianych przez fizykę.
opory atmosfery- zmienne warunki pogodowe.
grawitacyjne oddziaływanie Słońca i Księżyca oraz innych ciał niebieskich,
ciśnienie promieniowania kosmicznego- ciśnienie wywierane na powierzchnię przez promieniowanie elektromagnetyczne. Po zaabsorbowaniu, odbiciu lub rozproszeniu wytwarza ono ciśnienie odpowiadające gęstości energii strumienia pola podzielonej przez prędkość światła. Przykładowo promieniowanie słoneczne docierające do Ziemi ma gęstość energii strumienia pola równą 1370 W/m2, więc ciśnienie promieniowania wynosi 4,6 µPa.
pływy skorupy ziemskiej i pływy oceaniczne,
oddziaływanie sil elektromagnetycznych,
efekty relatywistyczne- ogół zaskakujących, ale potwierdzonych doświadczalnie, choć sprzecznych z tzw. zdrowym rozsądkiem zjawisk, które wynikają ze szczególnej bądź ogólnej teorii względności. Efekty relatywistyczne to m.in.: skrócenie Lorentza-Fitzgeralda, dylatacja czasu, wzrost masy poruszającego się ciała itd..
2. Zakłócenie propagacyjne:
refrakcja jonosferyczna,
refrakcja troposferyczna,
szumy atmosfery i kosmiczne,
interferencja fal wtórnych,
wielotorowość sygnałów
3. Błędy w urządzeniach nadawczych i odbiorczych:
niestabilność wzorców częstotliwości,
szumy własne odbiornika,
wariacje centrum fazowego anten GPS,
błędy geometryczne ustawienia satelitów DOP.
4. Błędy systematyczne obserwacji fazowych:
nieoznaczoność fazy,
nieciągłość fazy.
Błędy samego systemu GPS, które należą do systemów dynamicznych, czyli wymagają znajomości położenia (współrzędnych) satelitów w momencie ich obserwacji. Niezbędne są zatem precyzyjne elementy orbit satelitów i dokładne procedury ekstrapolacji efemeryd wyznaczanych na stacjach kontrolnych systemu. Do określania orbit potrzebna jest z kolei dobra znajomość pola grawitacyjnego. Wszystkie obserwacje wykonywane przez odbiorniki satelitarne GPS wymagają również rejestracji czasu, a zatem błędy systemu czasu GPS utrzymywanego przez zegary atomowe na stacjach dowodzenia i na satelitach oraz błędy transmisji tego czasu także wpływają na dokładność wyznaczania współrzędnych. Wpływ błędów systemu GPS można w dużej części usunąć przez zaawansowane modelowanie orbit oraz odpowiednie opracowanie obserwacji. W znacznym stopniu eliminowany jest on w technologiach różnicowych. Omawiając błędy systemu GPS, trzeba wspomnieć o celowych degradacjach sygnałów satelitów GPS. Nie chcąc udostępnić pełnej wysokiej dokładności wszystkim użytkownikom, USA wprowadzały celowe degradacje sygnału emitowanego przez satelity GPS: SA (selective availability) i AS (anti-spoofing). Pierwsza z nich polegała na ograniczeniu dokładności emisji poprawki zegara satelity i jego współrzędnych, przez co pomiary stawały się mniej dokładne. W ramach drugiej, satelity GPS zaprzestają emisji kodu precyzyjnego P i zastępują go tajnym kodem Y, dostępnym tylko dla wojska. Degradację SA zniesiono w roku 2002 i władze USA nie przewidują jej ponownego włączenia. Z degradacją AS odbiorniki geodezyjne GPS radzą sobie poprzez specjalną procedurę opracowania sygnału odebranego z satelity. Polega ona na tym, że odbiornik - nie rozumiejąc kodu Y - wykorzystuje pewne podobieństwa do kodu P. Uzyskuje wówczas wyniki wyznaczeń o dokładności kodu P. Z kilku procedur służących do tego celu, najczęściej stosuje się cross-correlation (korelację ukośną) i Z-tracking. Dzięki temu w postprocessingu otrzymuje się wyniki o wysokiej precyzji.
Łatwiej jest zrozumieć wpływy błędów ośrodka, ale trudniej je wyznaczyć. Czynniki te powodują błędy, które organizatorzy kampanii pomiarowych muszą starannie analizować, planując obserwacje sieci GPS. Błędy ośrodka wynikają przede wszystkim z refrakcji, przy czym jest ona inna dla wyższej warstwy atmosfery - jonosfery, a inna dla niższej - troposfery.
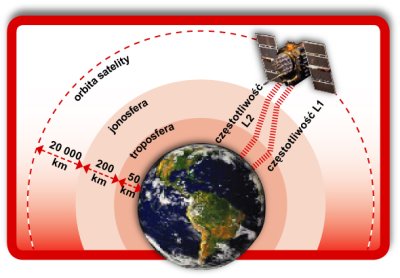
Wpływ jonosfery, którą charakteryzuje zmienne nasycenie elektronów, usuwamy prawie zupełnie przez pomiar odległości na dwóch odpowiednio dobranych częstotliwościach i tworzenie liniowych kombinacji wyników (w stosunku 9:7). Te operacje wykonują automatycznie wszystkie programy, za pomocą których opracowujemy wyniki. Wpływ troposfery, rozciągającej się do wysokości 50-70 km nad powierzchnią Ziemi, usuwamy przez wprowadzenie poprawki, którą oblicza automatycznie odbiornik satelitarny na podstawie zawartego w oprogramowaniu modelu atmosfery. Najprostszy model (stacjonarny, tj. nieuwzględniający zmian atmosfery w czasie) to zespół trzech wzorów wyrażających zmianę podstawowych parametrów atmosfery (tj. temperatury, ciśnienia i gęstości) w funkcji wysokości. Ponieważ nie odpowiada on na ogół warunkom atmosfery w miejscu obserwacji 
GPS, zatem i poprawka obliczona przez instrument będzie błędna. Jeśli jednak wyznaczamy różnice współrzędnych punktów sieci (a nie same współrzędne), to model troposfery w sąsiednich punktach sieci w zbliżony sposób nie będzie przystawał do warunków atmosferycznych i obliczone poprawki będą obciążone podobnymi błędami, a więc z różnicy współrzędnych się wyeliminują. Ważna jest więc nie tyle poprawność modelu atmosfery, ile warunek, żeby dawał on takie same błędy na wszystkich mierzonych punktach. Jest to możliwe wtedy, gdy punkty nie są zbytnio oddalone od siebie i panują na nich podobne warunki atmosferyczne. Nie ma jednoznacznej odpowiedzi na pytanie, co to znaczy „zbytnio oddalone”, gdyż zależy to od wielu zmieniających się czynników. Z praktyki ośrodków satelitarnych na całym świecie wynika, że do uzyskania centymetrowej dokładności różnicy wyznaczanych współrzędnych odległość między punktami nie powinna przekraczać 15-30 km. Można dodać, że bardziej zaawansowane programy obliczają poprawkę troposferyczną w dwóch częściach: drycorrection - dla wyższej warstwy tzw. troposfery suchej i wet correction - dla niższej warstwy tzw. troposfery wilgotnej, w której występuje już para wodna.
Do grupy błędów ośrodka należy także wielodrożność sygnału polegająca na tym, że do odbiornika satelitarnego dociera jednocześnie sygnał bezpośrednio z satelity i sygnał odbity od różnych obiektów na Ziemi znajdujących się w sąsiedztwie Niekiedy sygnał odbity jest nawet bardziej intensywny od sygnału dochodzącego z satelity i w takich przypadkach instrument może przerwać rejestrowanie sygnału. Następuje wówczas tzw. zanik cykli (cycle slip). Aby uchronić się od tego błędu, trzeba starannie wybierać stanowiska, unikać sytuowania ich w pobliżu dużych płaskich konstrukcji, dachów (szczególnie blaszanych), ścian, ale także bezpośrednio przy spokojnej tafli jezior lub innych zbiorników wodnych. Podczas obserwacji nie należy parkować samochodu tuż obok stanowiska, karoseria może bowiem odbijać sygnały satelitarne. Zalecane są anteny zawierające ekrany tłumiące sygnały odbite (obecnie używane anteny są w nie zazwyczaj wyposażone). Wielodrożność sygnału dla konkretnego projektowanego stanowiska można wyznaczyć za pomocą specjalnych pomiarów testowych. Zmniejszenie wpływu tego błędu można też osiągnąć, wydłużając czas obserwacji na stanowisku. Stwierdzono bowiem, że ma on charakter cykliczny o okresie około pół godziny.
Czy system mimo wyżej wymienionych błędów jest dokładny ?
Dokładność urządzeń GPS to temat wzbudzający wiele emocji ze względu na brak jednolitego systemu pomiaru tego parametru. Popularny wskaźnik CEP odnosi się do statystycznego udziału punktów o zadanej dokładności w całym ich zbiorze. Innymi słowy CEP (80%) 1-3 m oznacza, że 80% uzyskanych pomiarów mieści się w zakresie błędu 1-3 metra, przy czym nie wiadomo nic o pozostałych 20% pomiarów. W praktyce więc niewiele wiadomo o rzeczywistych osiągach urządzenia. Dodatkowo sytuację komplikuje definicja błędu pomiaru, którą producenci wykorzystują przy podawaniu parametrów urządzeń.
Kolejny problem to różnica pomiędzy laboratoryjnym pomiarem a rzeczywistym użytkowaniem urządzenia. Ze względu na fakt, że pomiar zależy od widoczności satelitów na niebie jakie ma dane urządzenie oraz ich konstelacji w danym momencie, dokładność realnych pomiarów może znacznie odbiegać od tego, co deklaruje producent. Jest to spowodowane tym, że w niesprzyjających warunkach coraz większego znaczenia nabierają te punkty, które nie są uwzględniane przez wskaźnik CEP. Sytuacji nie ułatwia fakt, że producenci często podają parametry samego modułu GPS, a nie końcowego urządzenia. Nie uwzględnia się więc zastosowanych komponentów RF oraz samej anteny. W efekcie popularne gotowe urządzenia oparte na tym samym układzie GPS mogą różnie się zachowywać w rzeczywistych warunkach pracy. Dominującym poglądem wśród użytkowników jest stwierdzenie, że im większa czułość urządzenia, tym większa jest jego dokładność. Nie uwzględnia się jednak elementu skoków pozycji przy pomiarach stacjonarnych lub w tzw. trudnych warunkach. Problem ten jest efektem zjawiska, które można zobrazować analogią występującą w aparatach cyfrowych - wraz ze zwiększaniem czułości ISO, zwiększa się ziarno (w przypadku aparatów cyfrowych lepszym określeniem wydaje się "szum"). Ten "szum" rośnie również wraz ze wzrostem czułości odbiorników GPS. Jest to szum radiowy, który algorytmy zastosowane w oprogramowaniu układu starają się odfiltrować i nie uwzględniać przy podawaniu pozycji. Jest to znacznie łatwiejsze, jeżeli obiekt porusza się, ze względu na możliwość wyeliminowania punktów nie spełniających pewnych założeń co do możliwości fizycznych obiektu (przyśpieszenie, prędkość, itd). W przypadku pomiaru stacjonarnego lub przy niewielkiej prędkości poruszania sprawa jest znacznie trudniejsza i w efekcie pomiar pozycji w przypadku niektórych urządzeń może ulegać znacznym wahaniom. Jest to szczególnie uciążliwe w przypadku zastosowań innych niż nawigacja samochodowa.
ZASTOSOWANIA SYSTEMU GPS.
1) Transport
generowanie mapy cyfrowej Polski 1:50 000,
nawigacja po sieci drogowej Polski (np. ze wskazówkami głosowymi),
systemy: monitorowania pojazdów, alarmowanie z pozycjonowaniem GPS/GSM, zarządzania flotą pojazdów i maszyn roboczych, lokalizacji pojazdów, aktywnego
zabezpieczenia pojazdów.
2) Turystyka
rejestrowanie trasy pokonanej przez użytkownika,
zapisywanie setek punktów w terenie,
możliwość wykorzystania funkcji "powrót po śladach" - nawigacja do dowolnych, wcześniej zapisanych pozycji,
kalkulacja czasu dojścia do celu,
informacja o prędkości aktualnej, maksymalnej i średniej, o przebytej drodze, czasie podróży,
informacja o aktualnej wysokości, prędkości wznoszenia/opadania,
dane o wysokości obliczonej na podstawie zmian ciśnienia atmosferycznego, aktualne ciśnienie oraz schematyczny wykres jego zmian w czasie (odbiorniki z barometrem).
3) Rolnictwo
pomiar obszarów rolnych,
aktualizacje mapy,
sterowanie sprzętem rolniczym.
4) Ochrona środowiska
określenie źródeł emisji,
wykonywanie domiarów punktów niedostępnych (kominów, prywatnych posesji),
generowanie mapy emisji,
odnajdywanie punktów z mapy.
5) Gospodarka leśna
aktualizowanie map numerycznych,
określenie powierzchni np. do zalesień (rejestrowanie nowych wydzieleń),
rejestrowanie drzewostanu.
6) GIS/kartografia
tworzenie w terenie plików arcview i mapinfo,
rejestrowanie atrybutów obiektów,
wyświetlanie plików GIS jako tła pomiarów.
7) Badania naukowe
rejestrowanie powierzchni i kształtu obiektów np. płatów roślinności,
projektowanie i wynoszenie w teren własnych siatek pomiarowych,
zapisywanie danych w formularzach elektronicznych.
8) Branża reklamowa
nadawanie wymiarów geograficznych badaniom rynku,
zbieranie ankiet z automatycznym zapisem lokalizacji,
określanie widoczności i położenia reklam i billboardów.
9) Przemysł ciężki
wiarygodne określanie źródeł emisji,
wykonywanie domiarów punktów niedostępnych (kominów, prywatnych posesji),
generowanie mapy emisji w terenie,
odnajdywanie punktów z mapy.
PRODUKCJA ODBIORNIKÓW GPS.
Rynek odbiorników GPS ma podobną strukturę do rynku telefonów komórkowych. Produkcją zajmuję się bowiem kilka dużych firm, które prawie całkowicie zaspokajają popyt na te towary. W przypadku komórek największą sprzedaż osiągają: Nokia, Sony Ericsson, Samsung, Motorola. Można powiedzieć, że ich odpowiednikami w branży GPS są:
Mio Technology Limited - tajwańska firma powstała w maju 2002 r. Ich główna siedziba europejska mieści się w Asse koło Brukseli. Mio posiada oddziały na całym świecie na Tajwanie, w USA, w Chinach, Korei Południowej, a w Europie w Wielkiej Brytanii i w Polsce (Warszawa). Sprzedają swoje produkty do 47 krajów na świecie.

Garmin - powstał w 1989 r. w stanie Kansas(USA). Założyli go Amerykanin Gary Burrell i Tajwańczyk Min Kao. Obecnie główną siedzibą jest Georg Town na Kajmanach. Firma głownie skupia się na produkcji na rynek azjatycki. Garmin produkuje odbiorniki aż dla pięciu segmentów: samochodowego, turystycznego, treningowego, morskiego i lotniczego.

TomTom holenderska firma założona w 1991 roku, z główną siedzibą w Amsterdamie. Zajmuję się głównie dostarczaniem produktów na rynek europejski. TomTom przejął niedawno firmę Tele Atlas, zajmującą się tworzeniem map cyfrowych i współpracującą z Google Maps.
NavRoad - trudno znaleźć jakiekolwiek informacje o tym 
producencie. Ze strony internetowej dowiadujemy się jedynie tyle, że ich ostatni produkt NavRoad NR460 dostał nagrodę „champion jakości” w prestiżowym polskim magazynie NEXT. Prawdopodobnie producent azjatycki.
ZESTAWIENIE POWYŻSZYCH PRODUKTÓW.
Producent |
Mio |
Garmin |
TomTom |
NavRoad |
Cena |
Niska |
stosunkowo wysoka |
stosunkowo wysoka |
niska |
Wygląd i konstrukcja |
niezbyt solidna konstrukcja, mała waga odbiornika |
solidna i estetycznie wyglądająca obudowa |
ładny wygląd zewnętrzny i ciekawy interfejs graficzny |
solidna obudowa, duży przejrzysty ekran |
Dostępność aktualizacji map |
brak częstych aktualizacji (szczególnie chodzi tu o mapy dla starszych modeli) |
dość częste aktualizacje i dobry dostęp do nich |
słaby dostęp do aktualizacji (najczęściej konieczny jest zakup nowej mapy) |
stosunkowo dobry dostęp do aktualizacji |
Bateria |
Raczej długa żywotność baterii |
niektórzy zwracają uwagę na niską wytrzymałość baterii (dotyczy to jednak tańszych modeli) |
w zależności od modelu, ale generalnie dobra |
łaba bateria (niektóre modele mają żywotność baterii ok. 1,5 h ) |
Obsługa i dodatki |
łatwa obsługa, duża liczba dodatkowych funkcji |
niewiele dodatkowych funkcji, łatwa obsługa |
łatwa obsługa |
łatwa obsługa, duża liczba dodatkowych funkcji |
Inne |
Krótki okres gwarancyjny na poszczególne części GPS-u, słaba kompatybilność z systemem Windows |
gęste pokrycie Polski punktami zainteresowania, dokładne mapy Polski i Europy |
niezbyt dokładna mapa dla Polski (w tańszych i starszych modelach), duża szybkość przeliczania trasy |
wolno szuka satelitów |
Powyższe zalety i wady są ogólnie wybranymi i najczęściej powtarzającymi się w opinii posiadaczy odbiorników GPS. Należy jednak pamiętać o tym, że poszczególne modele czasami znacząco różnią się od siebie. Wymagający użytkownicy najbardziej chwalą sobie produkty firmy Garmin, rzadziej TomTom. Wiąże się to z naciskiem obu firm przede wszystkim na nawigację i jej dokładność. Natomiast Mio i NavRoad oferują głównie GPS-y przeznaczone dla osób wykorzystujących je do „niezbyt skomplikowanych podróży”, dla zabawy i treningu. Trzeba jednak zaznaczyć, iż firmy te tworzą również bardziej ambitne urządzenia, o czym świadczą liczne wyróżnienia przyznawane przez prestiżowe magazyny. Ważnym elementem każdego odbiornika GPS jest mapa. Niektóre firmy kuszą kupujących niską ceną produktu, ale za to nie oferują żadnej mapy albo mapę niedokładną. Przed zakupem warto się zatem zastanowić do czego potrzebujemy GPS, jeśli tylko po to by pochwalić się przed znajomymi, to rzeczywiście nie warto wydawać zbyt dużo pieniędzy, ale jeśli dużo podróżujemy po Polsce czy Europie to lepiej kupić droższy odbiornik z zainstalowaną dokładną mapą i z możliwością jej późniejszej aktualizacji, niż później przeklinać tą jedną z najnowszych zdobyczy techniki.
ZASTOSOWANIE SYSTEMU GPS W POLSCE.
Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS należy do rodziny naziemnych, nawigacyjnych systemów referencyjnych wykorzystywanych przez administrację publiczną, instytucje państwowe, przedsiębiorców i zwykłych obywateli. Referencyjne systemy nawigacyjne w połączeniu z bazami informacji geograficznej GIS, rejestrami publicznymi i komercyjnym bazami danych znajdują coraz szersze zastosowanie w wielu dziedzinach życia. Obecnie systemy takie funkcjonują w oparciu o naziemne stacje referencyjne GNSS natomiast w przyszłości, w miarę postępu w modelowaniu jonosfery i troposfery, systemy referencyjne będą oparte głównie na satelitach nawigacyjnych. Jednym z trzech głównych segmentów systemu ASG-EUPOS jest segment odbiorczy. Jego rolą jest zbieranie danych obserwacyjnych do satelitów GNSS i przekazywanie ich w czasie rzeczywistym do Centrum Obliczeniowego. Składa się on z równomiernie rozłożonych na obszarze Polski i państw sąsiadujących stacji referencyjnych GNSS. Zgodnie ze standardem EUPOS przy budowie segmentu odbiorczego przyjęto następujące założenia:
średnia odległość pomiędzy stacjami wynosi 70km,
do sieci stacji referencyjnych włączone zostały istniejące stacje EPN i IGS,
współrzędne stacji wyznaczone zostaną w systemie ETRS89 oraz układach państwowych,
w stacjach referencyjnych wykorzystano jedynie precyzyjne dwuczęstotliwościowe odbiorniki GNSS.
miejsca zainstalowania stacji referencyjnych wybrano tak, aby zapewnić dogodne warunki obserwacji satelitów GNSS.
Dzięki zastosowaniu najnowszych technologii oraz doświadczeń geodezyjnych System ASG-EUPOS daje możliwości wykorzystania jego usług w wielu branżach, w których wysokiej jakości dane mają szczególne znaczenie. Przewiduje się, że zastosowanie systemu ASG-EUPOS przydatne będzie szczególnie w następujących branżach:
Bezpieczeństwo
Budownictwo przemysłowe
Geodezja i geodynamika
Komunikacja drogowa
Nawigacja morska, śródlądowa i powietrzna
Hydrografia i hydrologia
Energetyka
Obronność
Ochrona środowiska
Zarządzanie kryzysowe
Ochrona zdrowia
Rolnictwo i leśnictwo
Rurociągi
Sport i turystyka
Systemy Informacji Przestrzennej
Telekomunikacja

W amerykańskim systemie GPS-NAVSTAR segment kosmiczny składa się obecnie z 32 satelitów (początkowo zakładano 24 czynne i 5 zapasowych), krążących na 6 prawie-kołowych orbitach na wysokości 20 200 km, o nachyleniu 55o do równika. Parametry te zostały dobrane tak, aby w każdym miejscu na Ziemi widoczne były zawsze minimum 4 satelity systemu GPS. Okres obiegu satelitów w orbitach wynosi ok. 12 h. Satelity emitują fale elektromagnetyczne w dwóch częstotliwościach L1 i L2 (planowane jest wprowadzenie trzeciej - L5) dobranych tak, aby eliminować wpływ jonosfery na prędkość rozchodzenia się fal. Na pokładzie satelitów znajdują się ponadto precyzyjne zegary atomowe (czas GPST - ang. GPS Time).
Rosyjski system GLONASS operuje na 20 (początkowo zakładano 24) satelitach segmentu kosmicznego, rozmieszczonych na 3 prawie-kołowych orbitach na wysokości 19 100 km, o nachyleniu 64,8 stopni do równika. Okres obiegu satelitów wynosi nieco ponad 11h.
Europejski (ESA) system Galileo docelowo ma posiadać 30 (27 czynnych i 3 zapasowe) satelitów równomiernie rozmieszczonych na 3 orbitach na wysokości 23 200 km, o nachyleniu 56o do równika. Obecnie system jest w fazie rozruchu - na swoich orbitach znajdują się 2 pierwsze satelity.
We wszystkich trzech systemach satelity segmentu kosmicznego transmitują na Ziemię fale elektromagnetyczne. w skład segmentu naziemnego wszystkich tych systemów wchodzą sieci odbiorników naziemnych, które odbierając sygnały satelitarne dokonują obliczenia odległości do satelitów, których współrzędne są znane. w ten sposób, na zasadzie przestrzennego wcięcia liniowego wyznaczana jest pozycja każdej stacji naziemnej. z racji funkcjonowania na pokładach satelitów GNSS precyzyjnych zegarów atomowych opartych o wzorce cezowe i rubidowe, systemy te służą również globalnej dystrybucji czasu atomowego, poprzez odbiorniki naziemne.
3 RAZY „P” CZYLI PERSPEKTYWY, PRZYSZŁOŚĆ I PLANY.
GPS zdobywa coraz większą popularność wśród kierowców. Jego zastosowanie pierwotnie spełniało rolę nawigacji, jednakże wraz z rozwojem technologii i techniki telekomunikacyjnej jego zastosowanie znacznie się rozszerzyło i obecnie za jego pośrednictwem jesteśmy w stanie stwierdzić nie tylko pozycję pojazdu lecz także wszelkie jego cechy i parametry fizyczne.
Mimo coraz większej ilości funkcji nawigacje będą się stawać jeszcze bardziej płaskie
Zwiększą się rozmiary ekranów w nawigacji samochodowej. Cztery cale przekątnej to minimum Oczywiście są tutaj granice zdrowego rozsądku: nikt nie będzie przecież woził małego telewizora na przedniej szybie. W nawigacjach będzie też coraz więcej funkcji; bardzo możliwe, że już niedługo będziemy mogli korzystać w samochodzie z Internetu. Najnowszy model nawigacji, wyposażony jest w transmiter FM, który będzie mógł się komunikować z radiem samochodowym. Widać więc, że dotychczasowe dodatkowe funkcje nawigacji takie jak Bluetooth, odtwarzacz MP3 i MP4, czy przeglądarka zdjęć nie wyczerpują pomysłowości konstruktorów. Ceny nawigacji już obniżyły się o około połowę od zeszłego roku. Tanieją najważniejsze komponenty nawigacji takie jak wyświetlacze LCD, procesory, mapy pamięci. Mapy są wciąż drogie, Stworzenie i utrzymanie mapy wiąże się z olbrzymim kosztem, jednak rozpowszechnienie zestawów nawigacyjnych będzie sprzyjać spadkowi ich ceny, a wraz z nimi całości zestawów.
„Branża telematyczna związana z rynkiem monitoringu i zarządzania flotą dynamicznie się rozwija. Recesja, która dotyka sektor motoryzacyjny i wiele przedsiębiorstw w Polsce, może trochę paradoksalnie, ale powoduje większe zainteresowanie systemami telematycznymi. Instalacja tego typu urządzeń w pojazdach - jak wykazują to raporty eksploatacyjne - pozwala optymalizować koszty m.in. związane z zużyciem paliwa czy zniżkami w ubezpieczeniu” - mówi Robert Rozesłaniec, prezes zarządu AutoGard.
Nawigacja GPS coraz częściej wykorzystywana jest w palmtopach i w telefonach komórkowych! To również ważny trend w rozwoju nawigacji. Tak jak kilka lat temu w urządzeniach typu PDA, smartfonach i zwykłych telefonach zaczęły pojawiać się aparaty cyfrowe, czy odtwarzacze MP3, tak teraz widać podobne zjawisko w odniesieniu do GPS. Nawigacja w telefonach będzie się upowszechniać i można przypuszczać, że za rok, czy dwa lata, większość modeli oferowanych na rynku wyposażona będzie w GPS, podobnie jak dziś jest to z cyfrówkami wbudowanymi w telefony.
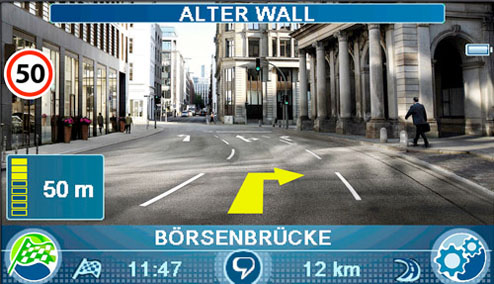
Blaupunkt pokazał nową wideonawigację TravelPilot N700. Urządzenie robi niesamowite wrażenie, pokazuje bowiem na ekranie dokładny widok drogi (aktualny), nanosząc nań wskazania nawigacyjne. Wbrew pozorom, zasada działania urządzenia jest dość prosta - droga filmowana jest przez kamerę, zamontowaną na tylnej ściance GPSa. Potem, na obraz z kamery nakładane są informacje o trasie i manewrach. Co więcej, nawigacja ta potrafi też rozpoznawać znaki drogowe i dobitnie przypominać kierowcy o ograniczeniach prędkości. Innych znaków na razie TravelPilot nie zna... A oprócz wspomnianych gadżetów, w nowym modelu znajdziemy też automatyczne informacje drogowe, sterowanie głosem, WiFi, Bluetooth, odtwarzacz multimediów oraz telewizor DVB-T. TravelPilot N700 pojawi się w ciągu miesiąca w cenie ok. 500 euro.
Dynamicznie rozwija się segment odbiorników GPS do tzw. palmtopów / PDA. Dzięki niskiej cenie i możliwości wyboru oprogramowania, które najlepiej spełnia oczekiwania użytkownika, jest to alternatywne rozwiązanie dla urządzeń typu wszystko - w - jednym. Dostępne opcje pozwalają na podłączenie odbiornika na kablu, na karcie rozszerzeń (CF lub SD) lub bezprzewodowo (bluetooth). Popularne stają się również palmtopy / PDA z wbudowanym odbiornikiem GPS. Dostępny jest bardzo szeroki wybór oprogramowania zarówno do nawigacji samochodowej (np. Automapa, MapaMap, Navigo), morskiej jak i specjalistyczne programy (np. do pomiaru powierzchni).
Nowy typ urządzeń to odbiorniki GPS połączone z funkcją logowania danych - tzw. datalogger GPS lub rejestrator trasy. Umożliwiają one zapis przebytej trasy bez konieczności uruchamiania dodatkowych urządzeń. Możliwość zapisu sięga od kilkuset punktów do kilkuset tysięcy punktów w zależności od modelu i producenta. Zapisaną trasę można wykorzystać do zobrazowania drogi na darmowych (Google Earth, Google Maps) i płatnych mapach (Automapa, MapaMap, eMapa, Nawigator) w zależności od producenta urządzenia. Umożliwia to monitorowanie pracy kierowców lub innych pracowników mobilnych. Dzięki połączeniu zapisanej trasy oraz wykonanych na niej zdjęć możemy każdej fotografii przypisać miejsce jej wykonania - jest to tzw. Geotagging lub w tej konkretnej formie Phototagging (spolszczone nazwy to Tagi geograficzne, Tagowanie geograficzne). Dzięki temu możemy w łatwy sposób inwentaryzować umiejscowienie obiektów lub zdarzeń. Jest to tanie rozwiązanie wykorzystywane przez różnego rodzaju służby na całym świecie.
Coraz częściej GPS stosuje się w telefonach komórkowych. Do tego celu wystarczył odbiornik GPS z bluetoothem i kompatybilny telefon. Obecnie coraz więcej telefonów posiada wbudowany moduł GPS. Również na telefony powstało wiele aplikacji go obsługujących.
Europejska Agencja Kosmiczna (ESA) jest w trakcie budowy własnego systemu nawigacji. Nosi on nazwę Galileo i składać się będzie z 30 satelitów. Zegary zastosowane w europejskich satelitach mają umożliwić osiągnięcie dokładności pozycjonowania w granicach 50 cm (dla użytkowników komercyjnych). Pierwsze testy Galileo rozpoczęły się w 2005 roku, a system ma być w pełni sprawny do roku 2012.
Dzięki wielu możliwościom wykorzystania GPSa, możemy z bardzo dużą dokładnością namierzyć cel oddalony o wiele kilometrów, dojechać za jego pomocą do miejsca do którego wybieramy się po raz pierwszy, czasem niekoniecznie najkrótszą trasą, ale zawsze do celu. W przyszłości łatwiej będzie identyfikować położenie obiektów lub własne, bo technika postępuje i z dnia na dzień pojawiają się nowe rozwiązania i zastosowania inżynierskie, bo jak napisał Wiktor Hugo: „Nic nie tworzy przyszłości tak jak marzenia…”
Bibliografia:
Januszewski Jacek „ Systemy satelitarne GPS, Galileo i inne.”
Lamparski Jacek „NAVSTAR GPS od teorii do praktyki.”
Kuziomko Artur „WPROWADZENIE DO GPS (GLOBAL POSITIONING SYSTEM)”
Narkiewicz Janusz„ GPS i inne satelitarne systemy nawigacyjne”
Specht Cezary „ System GPS”
Internet:
http://centrum.swiatgps.com.pl/
http://pl.wikipedia.org
http://www.geoforum.pl/pages/index.php?page=alfa_gps_cz5
http://www.wrotamalopolski.pl/root_Mapy/GPS/Zastosowania
SPIS TREŚCI:
I. HISTORIA (Emilia Banach)