1
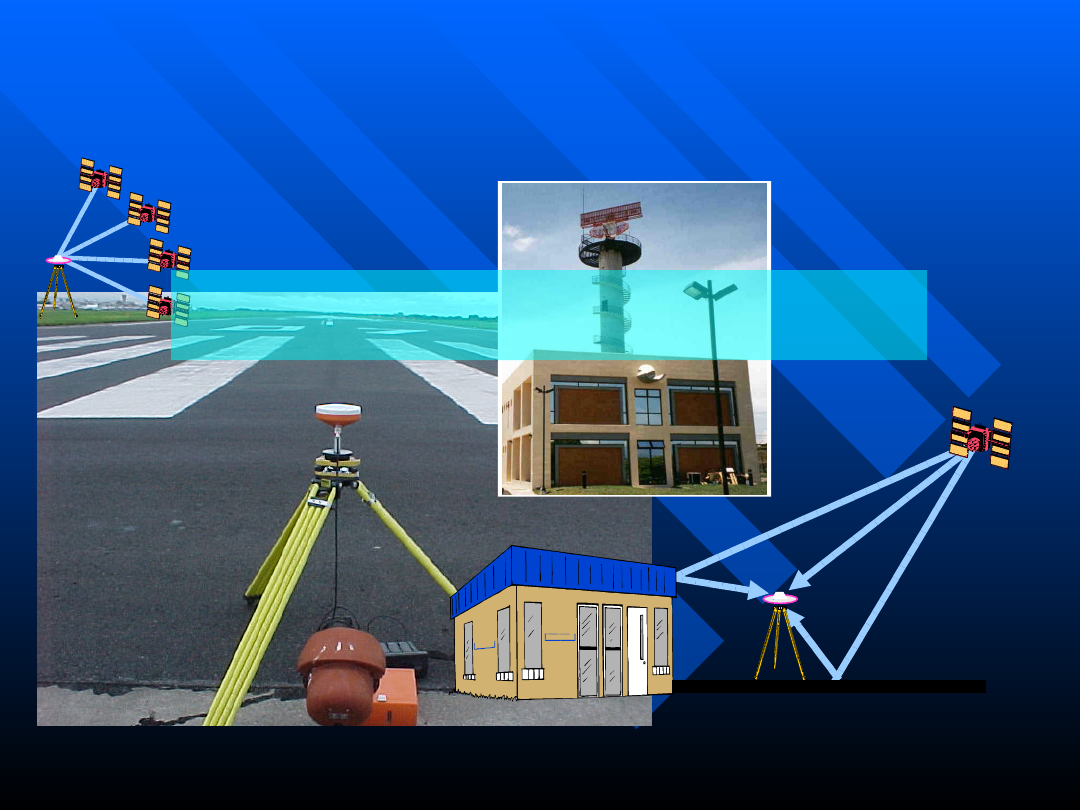
Di
re
ct
S
ig
na
l
R
e
f
e
ct
e
d
S
ig
n
a
l
GPS
Antenna
Re
fe
cte
d S
ign
al
Hard Surface
Satellite
Ograniczenia
Ograniczenia
dokładności
dokładności
odbiorników systemu
odbiorników systemu
GPS
GPS
Global Positioning
Global Positioning
System (GPS)
System (GPS)

2
Błędy pozycji
Błędy pozycji
Niezależne od zasady działania
Niezależne od zasady działania
systemu
systemu
Metodyczne wynikające z zasady
Metodyczne wynikające z zasady
działania systemu
działania systemu
Pomiaru powstające w
Pomiaru powstające w
urządzeniach odbiorczych
urządzeniach odbiorczych
Ograniczonego dostępu, celowo
Ograniczonego dostępu, celowo
wprowadzane przez właściciela
wprowadzane przez właściciela
systemu
systemu
3
Błędy niezależne od działania
Błędy niezależne od działania
systemu
systemu
Wynikają z faktu propagacji w
Wynikają z faktu propagacji w
ośrodku materialnym, w którym
ośrodku materialnym, w którym
zmienia się prędkość fali,
zmienia się prędkość fali,
częstotliwość i polaryzacja sygnału.
częstotliwość i polaryzacja sygnału.
Przyczyny błędu:
Przyczyny błędu:
Refrakcja (opóźnienie) jonosferyczne,
Refrakcja (opóźnienie) jonosferyczne,
Refrakcja (opóźnienie) troposferyczne,
Refrakcja (opóźnienie) troposferyczne,
Efekty relatywistyczne,
Efekty relatywistyczne,
Wielotorowość i zanik sygnału ze
Wielotorowość i zanik sygnału ze
względu na przeszkody terenowe.
względu na przeszkody terenowe.

4
Błędy wynikające z zasad
Błędy wynikające z zasad
działania systemu
działania systemu
Błędy efemeryd (orbitalne),
Błędy efemeryd (orbitalne),
Błędy określenia czasu
Błędy określenia czasu
(zegarów) na satelitach,
(zegarów) na satelitach,
Błędy geometryczne wzajemnego
Błędy geometryczne wzajemnego
ustawienia satelitów (DOP)
ustawienia satelitów (DOP)

5
Błędy orbit satelitarnych
Błędy orbit satelitarnych
(perturbacje satelitarne):
(perturbacje satelitarne):
pole grawitacyjne Ziemi,
pole grawitacyjne Ziemi,
opór atmosfery,
opór atmosfery,
grawitacyjne oddziaływanie Słońca i
grawitacyjne oddziaływanie Słońca i
Księżyca oraz innych ciał niebieskich,
Księżyca oraz innych ciał niebieskich,
ciśnienie promieniowania słonecznego,
ciśnienie promieniowania słonecznego,
pływy skorupy ziemskiej i pływy oceaniczne,
pływy skorupy ziemskiej i pływy oceaniczne,
oddziaływanie sił elektromagnetycznych,
oddziaływanie sił elektromagnetycznych,
efekty relatywistyczne.
efekty relatywistyczne.

6
Zakłócenia propagacyjne
Zakłócenia propagacyjne
refrakcja jonosferyczna i
refrakcja jonosferyczna i
troposferyczna,
troposferyczna,
szumy atmosfery i kosmiczne,
szumy atmosfery i kosmiczne,
interferencja fal wtórnych,
interferencja fal wtórnych,

7
Aparatura odbiorcza
Aparatura odbiorcza
niestabilność wzorców
niestabilność wzorców
częstotliwości,
częstotliwości,
szumy własne odbiornika,
szumy własne odbiornika,
wariacje centrum fazowego
wariacje centrum fazowego
anten GPS.
anten GPS.

8
Błędy i nieznajomość modeli zjawisk
Błędy i nieznajomość modeli zjawisk
geofizycznych krótko i
geofizycznych krótko i
długookresowych
długookresowych
pływy skorupy ziemskiej,
pływy skorupy ziemskiej,
pływy oceaniczne,
pływy oceaniczne,
pływy atmosferyczne,
pływy atmosferyczne,
model ruchu płyt
model ruchu płyt
kontynentalnych.
kontynentalnych.

9
Intencjonalne ograniczenia
Intencjonalne ograniczenia
dokładności i dostępu
dokładności i dostępu
AS, Anti-Spoofing, system
AS, Anti-Spoofing, system
zapobiegania intencjonalnym
zapobiegania intencjonalnym
próbom zakłócenia pracy
próbom zakłócenia pracy
systemu, SA, Selective
systemu, SA, Selective
Availability, system
Availability, system
ograniczania dostępu.
ograniczania dostępu.

10
Błędy systematyczne
Błędy systematyczne
obserwacji fazowych
obserwacji fazowych
nieoznaczoność fazy,
nieoznaczoność fazy,
nieciągłości fazy.
nieciągłości fazy.

11
Offset zegara satelitarnego
Offset zegara satelitarnego
dt
dt
Offset zegara satelitarnego jest
Offset zegara satelitarnego jest
spowodowany niedokładną synchronizacją
spowodowany niedokładną synchronizacją
wzorców satelitarnych do czasu GPS.
wzorców satelitarnych do czasu GPS.
Poprawki zegarów satelitów GPS są
Poprawki zegarów satelitów GPS są
wyznaczane przez segment kontrolny GPS
wyznaczane przez segment kontrolny GPS
na podstawie opracowania danych
na podstawie opracowania danych
pochodzących ze stacji śledzących.
pochodzących ze stacji śledzących.
Współczynniki wielomianu aproksymującego
Współczynniki wielomianu aproksymującego
są retransmitowane przez satelity GPS do
są retransmitowane przez satelity GPS do
użytkowników w depeszy nawigacyjnej.
użytkowników w depeszy nawigacyjnej.
Parametry te umożliwiają obliczenie
Parametry te umożliwiają obliczenie
wartości poprawki zegara satelitarnego z
wartości poprawki zegara satelitarnego z
dokładnością do pojedynczych metrów.
dokładnością do pojedynczych metrów.

12
Offset zegara satelitarnego
Offset zegara satelitarnego
dt
dt
Poprawka jest obliczana ze wzoru:
Poprawka jest obliczana ze wzoru:
gdzie:
gdzie:
a0,a1,a2
a0,a1,a2
-
-
współczynniki wielomianu transmitowane w
współczynniki wielomianu transmitowane w
depeszy satelitarnej.
depeszy satelitarnej.
t
t
-
-
moment , na który wyznaczamy poprawkę,
moment , na który wyznaczamy poprawkę,
t0
t0
-
-
epoka poprawki.
epoka poprawki.
W obliczeniach poprawki zegara satelity uwzględniane są
W obliczeniach poprawki zegara satelity uwzględniane są
również efekty relatywistyczne wynikające z ruchu wzorca
również efekty relatywistyczne wynikające z ruchu wzorca
częstotliwości w polu grawitacyjnym Ziemi.
częstotliwości w polu grawitacyjnym Ziemi.
Orbity satelitów GPS charakteryzują się niewielką
Orbity satelitów GPS charakteryzują się niewielką
ekscentrycznością, mimo to zmiany potencjału pola
ekscentrycznością, mimo to zmiany potencjału pola
grawitacyjnego mają znaczenie dla wyznaczania poprawki
grawitacyjnego mają znaczenie dla wyznaczania poprawki
zegara.
zegara.
Efekty relatywistyczne mogą osiągać wielkość rzędu kilku
Efekty relatywistyczne mogą osiągać wielkość rzędu kilku
metrów.
metrów.
2
0
2
0
1
0
)
(
)
(
t
t
a
t
t
a
a
dt

13
Offset zegara satelitarnego
Offset zegara satelitarnego
dt
dt
Wynikiem ruchu satelity w zmiennym polu
Wynikiem ruchu satelity w zmiennym polu
grawitacyjnym jest zmiana wskazań wzorca,
grawitacyjnym jest zmiana wskazań wzorca,
będąca funkcją ekscentryczności jak i
będąca funkcją ekscentryczności jak i
współrzędnych satelity.
współrzędnych satelity.
Poprawka ta obliczana jest ze wzoru:
Poprawka ta obliczana jest ze wzoru:
gdzie:
gdzie:
F
F
-
-
stała 4.442809305 10-10 sec/
stała 4.442809305 10-10 sec/
e
e
-
-
ekscentryczność
ekscentryczność
a
a
-
-
promień dużej półosi orbity
promień dużej półosi orbity
E
E
-
-
anomalia ekscentryczna
anomalia ekscentryczna
E
a
Fe
dt
sin

14
Offset zegara odbiornika dT
Offset zegara odbiornika dT
Offset skali czasu odbiornika dT wynika z braku
Offset skali czasu odbiornika dT wynika z braku
synchronizacji zegara odbiornika do skali czasu GPS.
synchronizacji zegara odbiornika do skali czasu GPS.
Jest on zwykle traktowany jako dodatkowa niewiadoma i
Jest on zwykle traktowany jako dodatkowa niewiadoma i
w procesie obliczeniowym prawie całkowicie usuwany.
w procesie obliczeniowym prawie całkowicie usuwany.
Fizyczna realizacja skali czasu odbiornika charakteryzuje
Fizyczna realizacja skali czasu odbiornika charakteryzuje
się często dużym błędem, dochodzącym niekiedy do
się często dużym błędem, dochodzącym niekiedy do
kilkudziesięciu milisekund.
kilkudziesięciu milisekund.
Niektóre odbiorniki poprawiają okresowo fizyczną skalę
Niektóre odbiorniki poprawiają okresowo fizyczną skalę
czasu w oparciu o wyznaczaną na bieżąco poprawkę
czasu w oparciu o wyznaczaną na bieżąco poprawkę
zegara. W przypadku obserwacji synchronicznych, takich
zegara. W przypadku obserwacji synchronicznych, takich
jakie wykonuje się między innymi dla potrzeb
jakie wykonuje się między innymi dla potrzeb
geodezyjnych, błąd fizycznej realizacji skali czasu
geodezyjnych, błąd fizycznej realizacji skali czasu
odbiornika powoduje dodatkowe, nieusuwalne
odbiornika powoduje dodatkowe, nieusuwalne
zaszumienie wielkości pomiarowych.
zaszumienie wielkości pomiarowych.
W szczególności, w obecności SA, residua podwójnych
W szczególności, w obecności SA, residua podwójnych
różnic charakteryzują się amplitudą rzędu kilkunastu
różnic charakteryzują się amplitudą rzędu kilkunastu
centymetrów na kilkadziesiąt milisekund błędu fizycznej
centymetrów na kilkadziesiąt milisekund błędu fizycznej
realizacji zegara.
realizacji zegara.

15
Opóźnienie troposferyczne
Opóźnienie troposferyczne
Opóźnienie troposferyczne wynika ze zmian
Opóźnienie troposferyczne wynika ze zmian
prędkości sygnału przy przejściu przez troposferę
prędkości sygnału przy przejściu przez troposferę
- dolną warstwę atmosfery rozciągającą się od
- dolną warstwę atmosfery rozciągającą się od
powierzchni Ziemi do wysokości około 10 km.
powierzchni Ziemi do wysokości około 10 km.
Sygnały radiowe GPS, tak jak i inne sygnały
Sygnały radiowe GPS, tak jak i inne sygnały
radiowe o częstotliwościach poniżej 30 GHz, nie
radiowe o częstotliwościach poniżej 30 GHz, nie
podlegają zjawisku dyspersji przy przejściu przez
podlegają zjawisku dyspersji przy przejściu przez
troposferę co oznacza, iż wielkość opóźnienia jest
troposferę co oznacza, iż wielkość opóźnienia jest
niezależna od częstotliwości fali radiowej.
niezależna od częstotliwości fali radiowej.
Troposfera powoduje opóźnienie sygnału i dlatego
Troposfera powoduje opóźnienie sygnału i dlatego
wyznaczona poprawka troposferyczna jest
wyznaczona poprawka troposferyczna jest
odejmowana od rejestrowanej pseudoodległości
odejmowana od rejestrowanej pseudoodległości
lub fazy.
lub fazy.

16
Opóźnienie troposferyczne
Opóźnienie troposferyczne
Znaczna część całkowitego opóźnienia, około 90%, jest
Znaczna część całkowitego opóźnienia, około 90%, jest
spowodowana poprzez oddziaływanie fali
spowodowana poprzez oddziaływanie fali
elektromagnetycznej z suchym powietrzem, podczas gdy
elektromagnetycznej z suchym powietrzem, podczas gdy
pozostałe 10% przez oddziaływanie z parą wodną.
pozostałe 10% przez oddziaływanie z parą wodną.
Część sucha opóźnienia może być oszacowana z błędem od
Część sucha opóźnienia może być oszacowana z błędem od
2
2
-
-
5 % za pomocą odpowiedniego modelu atmosfery.
5 % za pomocą odpowiedniego modelu atmosfery.
Część mokra opóźnienia troposferycznego może być
Część mokra opóźnienia troposferycznego może być
wyznaczana przy pomocy radiometrów mikrofalowych WVR
wyznaczana przy pomocy radiometrów mikrofalowych WVR
(Water Vapor Radiometer).
(Water Vapor Radiometer).
Główną przeszkodą ich praktycznego wykorzystania jest ich
Główną przeszkodą ich praktycznego wykorzystania jest ich
wysoka cena oraz złożoność.
wysoka cena oraz złożoność.
Dlatego zazwyczaj błąd powodowany przez część mokrą
Dlatego zazwyczaj błąd powodowany przez część mokrą
atmosfery jest w praktyce pomijany.
atmosfery jest w praktyce pomijany.
Modele pozwalające obliczyć wielkość opóźnienia
Modele pozwalające obliczyć wielkość opóźnienia
troposferycznego uwzględniają wysokość satelity nad
troposferycznego uwzględniają wysokość satelity nad
horyzontem, jak również od parametrów meteorologicznych
horyzontem, jak również od parametrów meteorologicznych
w miejscu obserwacji - temperaturę, ciśnienie i wilgotność.
w miejscu obserwacji - temperaturę, ciśnienie i wilgotność.
W praktyce często zamiast wyników aktualnych pomiarów
W praktyce często zamiast wyników aktualnych pomiarów
meteorologicznych używa się parametrów standardowych.
meteorologicznych używa się parametrów standardowych.

17
Błąd jonosferyczny
Błąd jonosferyczny
Zmienność opóźnienia jonosferycznego jest jednym z
Zmienność opóźnienia jonosferycznego jest jednym z
najpoważniejszych obiektywnych źródeł błędu
najpoważniejszych obiektywnych źródeł błędu
wyznaczania pozycji.
wyznaczania pozycji.
Duża zmienność warunków jonosferycznych,
Duża zmienność warunków jonosferycznych,
zarówno dobowa jak i długookresowa, powoduje, iż
zarówno dobowa jak i długookresowa, powoduje, iż
model opóźnienia jonosferycznego transmitowany
model opóźnienia jonosferycznego transmitowany
przez satelitę pozwala na redukcję odpowiedniego
przez satelitę pozwala na redukcję odpowiedniego
błędu co najwyżej w 50 procentach.
błędu co najwyżej w 50 procentach.
Dokładniejszą wartość opóźnienia jonosferycznego
Dokładniejszą wartość opóźnienia jonosferycznego
obliczyć można w oparciu o rezultaty pomiarów
obliczyć można w oparciu o rezultaty pomiarów
wykonywanych jednocześnie na częstotliwościach L1
wykonywanych jednocześnie na częstotliwościach L1
i L2.
i L2.
Wymaga to użycia odbiornika
Wymaga to użycia odbiornika
dwuczęstotliwościowego.
dwuczęstotliwościowego.

18
Błąd jonosferyczny
Błąd jonosferyczny
Efekt jonosferyczny wynika z wpływu jonosfery, górnej warstwy
Efekt jonosferyczny wynika z wpływu jonosfery, górnej warstwy
atmosfery rozciągającej się od wysokości 50
atmosfery rozciągającej się od wysokości 50
-
-
1000 km nad
1000 km nad
powierzchnią Ziemi. Zjonizowane gazy w jonosferze, powstałe w
powierzchnią Ziemi. Zjonizowane gazy w jonosferze, powstałe w
wyniku ultrafioletowego promieniowania Słońca i oddziaływania
wyniku ultrafioletowego promieniowania Słońca i oddziaływania
wiatru słonecznego, powodują zmianę prędkości fal
wiatru słonecznego, powodują zmianę prędkości fal
elektromagnetycznych.
elektromagnetycznych.
Ta zmiana prędkości jest zależna, przeciwnie niż w przypadku
Ta zmiana prędkości jest zależna, przeciwnie niż w przypadku
troposfery od częstotliwości fali elektromagnetycznej.
troposfery od częstotliwości fali elektromagnetycznej.
Zjawisko zależności prędkości fali od częstotliwości jest
Zjawisko zależności prędkości fali od częstotliwości jest
nazywane dyspersją.
nazywane dyspersją.
W jonosferze, w przypadku fal elektromagnetycznych o
W jonosferze, w przypadku fal elektromagnetycznych o
częstotliwościach powyżej 30 MHz, czoło fali ulega opóźnieniu,
częstotliwościach powyżej 30 MHz, czoło fali ulega opóźnieniu,
podczas gdy faza fali przyspieszeniu.
podczas gdy faza fali przyspieszeniu.
Konsekwencją tego zjawiska są zmiany rejestrowanej fazy i
Konsekwencją tego zjawiska są zmiany rejestrowanej fazy i
pseudoodległości. Efekty przyspieszenia fazy i opóźnienia czoła
pseudoodległości. Efekty przyspieszenia fazy i opóźnienia czoła
fali mają w takim środowisku zbliżoną wielkość lecz przeciwny
fali mają w takim środowisku zbliżoną wielkość lecz przeciwny
znak.
znak.
Wielkość efektu jonosferycznego jest proporcjonalna do liczby
Wielkość efektu jonosferycznego jest proporcjonalna do liczby
swobodnych elektronów TEC (ang. Total Electron Content),
swobodnych elektronów TEC (ang. Total Electron Content),
mieszczących się w jednostkowym prostopadłościanie od
mieszczących się w jednostkowym prostopadłościanie od
odbiornika do satelity.
odbiornika do satelity.

19
Błąd jonosferyczny
Błąd jonosferyczny
TEC jest funkcją wielu zmiennych czynników:
TEC jest funkcją wielu zmiennych czynników:
pory dnia,
pory dnia,
aktywności słonecznej,
aktywności słonecznej,
położenia geograficznego
położenia geograficznego
wysokości zenitalnej satelity.
wysokości zenitalnej satelity.
Efekt jonosferyczny przybiera największą wartość w strefie
Efekt jonosferyczny przybiera największą wartość w strefie
równika magnetycznego. Obszar ten nie obejmuje Polski.
równika magnetycznego. Obszar ten nie obejmuje Polski.
Typowa wielkość efektu jonosferycznego dla satelity GPS w
Typowa wielkość efektu jonosferycznego dla satelity GPS w
zenicie osiąga 5 m lecz może dochodzić nawet do 100m w
zenicie osiąga 5 m lecz może dochodzić nawet do 100m w
okresach wzmożonej aktywności słonecznej lub burz
okresach wzmożonej aktywności słonecznej lub burz
jonosferycznych.
jonosferycznych.
Wielkość efektu jonosferycznego jest odwrotnie
Wielkość efektu jonosferycznego jest odwrotnie
proporcjonalna do kwadratu częstotliwości fali. Taka
proporcjonalna do kwadratu częstotliwości fali. Taka
zależność umożliwia wykorzystanie odbiorników
zależność umożliwia wykorzystanie odbiorników
dwuczęstotliwościowych do eliminacji opóźnienia poprzez
dwuczęstotliwościowych do eliminacji opóźnienia poprzez
porównanie pseudoodległości PL1 i PL2, zmierzonych
porównanie pseudoodległości PL1 i PL2, zmierzonych
odpowiednio w pasmach L1 i L2
odpowiednio w pasmach L1 i L2
.
.

20
Błąd jonosferyczny
Błąd jonosferyczny
W przypadku obserwacji fazowych
W przypadku obserwacji fazowych
eliminacja wpływu jonosfery jest możliwa
eliminacja wpływu jonosfery jest możliwa
zarówno za pomocą odbiorników
zarówno za pomocą odbiorników
dwuczęstotliwościowych korzystających z
dwuczęstotliwościowych korzystających z
kodu P jak i bezkodowych.
kodu P jak i bezkodowych.
W odbiornikach jednoczęstotliwościowych
W odbiornikach jednoczęstotliwościowych
przybliżona poprawka obliczona jest za
przybliżona poprawka obliczona jest za
pomocą modelu, którego parametry
pomocą modelu, którego parametry
transmitowane są przez satelitę.
transmitowane są przez satelitę.

21
Błąd orbitalny
Błąd orbitalny
Błąd orbitalny, występujący w postaci niejawnej w odległości d
Błąd orbitalny, występujący w postaci niejawnej w odległości d
pomiędzy antena satelity a anteną stacją odbiorczej, jest
pomiędzy antena satelity a anteną stacją odbiorczej, jest
rezultatem dwóch czynników
rezultatem dwóch czynników
:
:
Po pierwsze, wyznaczenie i predykcja orbit satelitów przez
Po pierwsze, wyznaczenie i predykcja orbit satelitów przez
segment kontrolny są obarczone błędem.
segment kontrolny są obarczone błędem.
Po drugie, właściciel systemu wprowadza celową degradację
Po drugie, właściciel systemu wprowadza celową degradację
informacji orbitalnej transmitowanej w depeszy satelitarnej.
informacji orbitalnej transmitowanej w depeszy satelitarnej.
Zniekształcenie informacji orbitalnej jest jednym z narzędzi
Zniekształcenie informacji orbitalnej jest jednym z narzędzi
polityki Ograniczonego Dostępu S.A.
polityki Ograniczonego Dostępu S.A.
Błąd współrzędnych satelitów GPS, obliczonych z użyciem danych z
Błąd współrzędnych satelitów GPS, obliczonych z użyciem danych z
efemerydy pokładowej może dochodzić do 50m.
efemerydy pokładowej może dochodzić do 50m.
Wpływ błędu orbity jest znacząco redukowany w metodach
Wpływ błędu orbity jest znacząco redukowany w metodach
różnicowych wyznaczania pozycji. Jednak przy większych
różnicowych wyznaczania pozycji. Jednak przy większych
odległościach pomiędzy punktami pomiarowymi
odległościach pomiędzy punktami pomiarowymi
-
-
rzędu setek
rzędu setek
kilometrów
kilometrów
-
-
wpływ nie wyeliminowanych błędów orbitalnych
wpływ nie wyeliminowanych błędów orbitalnych
zaczyna wzrastać.
zaczyna wzrastać.
W przypadku precyzyjnych opracowań należy korzystać z efemeryd
W przypadku precyzyjnych opracowań należy korzystać z efemeryd
precyzyjnych, które są dostępne już po około 12 godzinach po
precyzyjnych, które są dostępne już po około 12 godzinach po
zakończeniu obserwacji i są udostępniane przez różne placówki
zakończeniu obserwacji i są udostępniane przez różne placówki
naukowe.
naukowe.

22
Nieoznaczoność fazy
Nieoznaczoność fazy
Nieoznaczoność pomiaru fazy N jest arbitralną liczbą
Nieoznaczoność pomiaru fazy N jest arbitralną liczbą
całkowitą.
całkowitą.
Wielkość ta może być interpretowana jako różnica
Wielkość ta może być interpretowana jako różnica
wielkości początkowej zintegrowanej fazy i odległości. Jest
wielkości początkowej zintegrowanej fazy i odległości. Jest
to wielkość różna dla każdego obserwowanego satelity.
to wielkość różna dla każdego obserwowanego satelity.
Nieoznaczoność N zachowuje stałą wartość podczas
Nieoznaczoność N zachowuje stałą wartość podczas
pomiarów, jeżeli nie nastąpi zaburzenie procesu śledzenia
pomiarów, jeżeli nie nastąpi zaburzenie procesu śledzenia
sygnału satelitarnego.
sygnału satelitarnego.
Wystąpienie takiego zaburzenia powoduje powstanie
Wystąpienie takiego zaburzenia powoduje powstanie
nieciągłości fazy (ang. Cycle Slip), czyli skokowej zmiany
nieciągłości fazy (ang. Cycle Slip), czyli skokowej zmiany
rejestrowanej fazy o całkowitą liczbę cykli.
rejestrowanej fazy o całkowitą liczbę cykli.
Wykrycie i poprawienie nieciągłości fazy jest krytyczne dla
Wykrycie i poprawienie nieciągłości fazy jest krytyczne dla
precyzyjnych pomiarów geodezyjnych z wykorzystaniem
precyzyjnych pomiarów geodezyjnych z wykorzystaniem
obserwacji fazowych, w tym szczególnie techniki RTK.
obserwacji fazowych, w tym szczególnie techniki RTK.

23
Błędy pomiarowe
Błędy pomiarowe
pseudoodległości i fazy
pseudoodległości i fazy
Błędy pomiaru pseudoodległości są zależne
Błędy pomiaru pseudoodległości są zależne
od odbiornika i wahają się w przedziałach
od odbiornika i wahają się w przedziałach
od 1 do 3m dla kodu C/A i od 10 do 30 cm
od 1 do 3m dla kodu C/A i od 10 do 30 cm
dla kodu P.
dla kodu P.
Błąd pomiaru fazy jest zazwyczaj nie
Błąd pomiaru fazy jest zazwyczaj nie
większy niż kilka milimetrów.
większy niż kilka milimetrów.
Wysoka dokładność pomiaru fazowego
Wysoka dokładność pomiaru fazowego
może być wykorzystana do filtrowania
może być wykorzystana do filtrowania
szumu pomiarowego pseudoodległości,
szumu pomiarowego pseudoodległości,
jeżeli są dostępne oba rodzaje obserwacji.
jeżeli są dostępne oba rodzaje obserwacji.

24
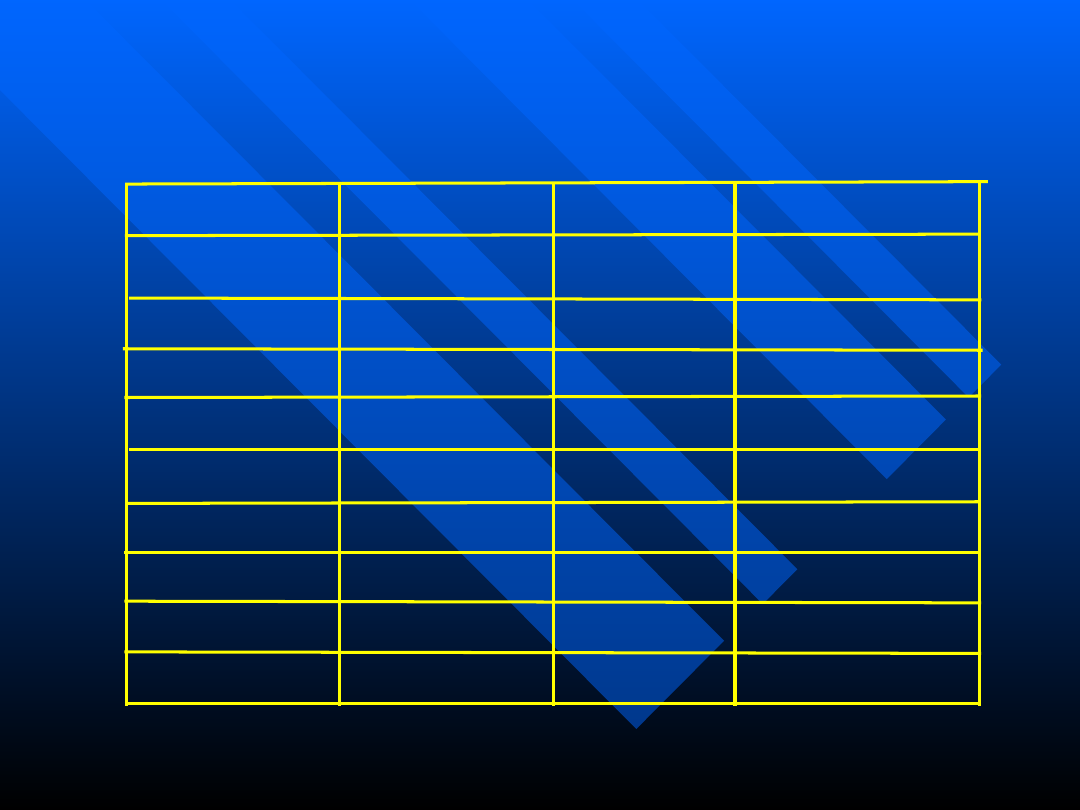
Interferencja fal wtórnych
Interferencja fal wtórnych
Interferencja fal wtórnych, powstałych na skutek odbić (ang.
Interferencja fal wtórnych, powstałych na skutek odbić (ang.
multipath), powoduje zmianę rejestrowanej fazy i
multipath), powoduje zmianę rejestrowanej fazy i
pseudoodległości.
pseudoodległości.
Wpływ interferencji fal wtórnych jest szczególnie groźny dla
Wpływ interferencji fal wtórnych jest szczególnie groźny dla
pomiaru pseudoodległości.
pomiaru pseudoodległości.
Błąd powodowany tym zjawiskiem może osiągnąć w
Błąd powodowany tym zjawiskiem może osiągnąć w
skrajnych przypadkach wielkość długości chipu kodu, czyli
skrajnych przypadkach wielkość długości chipu kodu, czyli
293m dla kodu C/A i 29.3m dla kodu P.
293m dla kodu C/A i 29.3m dla kodu P.
Teoretyczna wielkość błędu fazy spowodowanego
Teoretyczna wielkość błędu fazy spowodowanego
interferencją nie przekracza pojedynczej długości fali, jednak
interferencją nie przekracza pojedynczej długości fali, jednak
już wielkości centymetrowe mogą całkowicie uniemożliwić
już wielkości centymetrowe mogą całkowicie uniemożliwić
wyznaczenie nieoznaczoności.
wyznaczenie nieoznaczoności.
W takim przypadku nie otrzymamy żadnego rozwiązania.
W takim przypadku nie otrzymamy żadnego rozwiązania.
Skonstruowanie anten i układów elektronicznych które
Skonstruowanie anten i układów elektronicznych które
byłyby odporne na interferencję jest obecnie jednym z
byłyby odporne na interferencję jest obecnie jednym z
głównych problemów stojących przed konstruktorami sprzętu
głównych problemów stojących przed konstruktorami sprzętu
GPS.
GPS.

25
Zmienność i niejednoznaczność
Zmienność i niejednoznaczność
centrów fazowych anten GPS
centrów fazowych anten GPS
Odpowiednie poprawki uzyskuje się podczas
Odpowiednie poprawki uzyskuje się podczas
procedur kalibracyjnych, a następnie po
procedur kalibracyjnych, a następnie po
sprawdzeniu wprowadza się do opracowanych
sprawdzeniu wprowadza się do opracowanych
wyników pomiaru.
wyników pomiaru.
Złożoność problemu ukazała się w całej
Złożoność problemu ukazała się w całej
okazałości, gdy przeprowadzono i opracowano
okazałości, gdy przeprowadzono i opracowano
precyzyjne pomiary GPS na długich cięciwach
precyzyjne pomiary GPS na długich cięciwach
odbiornikami różnych producentów.
odbiornikami różnych producentów.
W skrajnych wypadkach, stosując anteny różnych
W skrajnych wypadkach, stosując anteny różnych
typów na końcach mierzonego wektora o długości
typów na końcach mierzonego wektora o długości
kilku tysięcy kilometrów możemy się spodziewać
kilku tysięcy kilometrów możemy się spodziewać
wystąpienia błędu systematycznego rzędu 10 cm.
wystąpienia błędu systematycznego rzędu 10 cm.

26
Zmienność i niejednoznaczność
Zmienność i niejednoznaczność
centrów fazowych anten GPS
centrów fazowych anten GPS
Okazało się, że wszystkie anteny GPS wykazują zmienność
Okazało się, że wszystkie anteny GPS wykazują zmienność
położenia centrum fazowego w zależności od kierunku z jakiego
położenia centrum fazowego w zależności od kierunku z jakiego
dociera do nich sygnał satelitarny, czyli od jego azymutu i
dociera do nich sygnał satelitarny, czyli od jego azymutu i
wysokości.
wysokości.
Wykazano również, że położenie centrum fazowego
Wykazano również, że położenie centrum fazowego
przemieszcza się różnie dla częstotliwości L1 i L2 tej samej
przemieszcza się różnie dla częstotliwości L1 i L2 tej samej
anteny.
anteny.
Dla najlepszych anten wartości przemieszczenia pionowego są
Dla najlepszych anten wartości przemieszczenia pionowego są
rzędu 11 mm dla L1 i 8 mm dla L2.
rzędu 11 mm dla L1 i 8 mm dla L2.
Poziome przemieszczenia są na poziomie 1 mm i można je
Poziome przemieszczenia są na poziomie 1 mm i można je
pominąć.
pominąć.
Obecnie większość dobrych programów służących do
Obecnie większość dobrych programów służących do
opracowania obserwacji geodezyjnych zawiera wbudowane
opracowania obserwacji geodezyjnych zawiera wbudowane
modele powierzchni stałej fazy dla anten różnych producentów.
modele powierzchni stałej fazy dla anten różnych producentów.

27
Parametry charakteryzujące
Parametry charakteryzujące
błąd pozycji
błąd pozycji
Parametrami używanymi przy
Parametrami używanymi przy
charakteryzowaniu błędu pozycji
charakteryzowaniu błędu pozycji
wyznaczonej przez odbiornik są:
wyznaczonej przez odbiornik są:
SEP (Spherical Error Probable) - 50%
SEP (Spherical Error Probable) - 50%
pozycji wyznaczanych trójwymiarowo
pozycji wyznaczanych trójwymiarowo
znajduje się w sferze o promieniu SEP,
znajduje się w sferze o promieniu SEP,
CEP (Circular Error Probable) - 50%
CEP (Circular Error Probable) - 50%
pozycji wyznaczanych dwuwymiarowo
pozycji wyznaczanych dwuwymiarowo
znajduje się wewnątrz okręgu o
znajduje się wewnątrz okręgu o
promieniu CEP.
promieniu CEP.

28
Parametry charakteryzujące
Parametry charakteryzujące
błąd pozycji
błąd pozycji
Ocena przewidywanej dokładności dokonywana
Ocena przewidywanej dokładności dokonywana
jest zazwyczaj poprzez znajomość:
jest zazwyczaj poprzez znajomość:
UERE
UERE
(User Estimate Range Error)
(User Estimate Range Error)
-
-
estymowane odchylenie standardowe pomiaru
estymowane odchylenie standardowe pomiaru
odległości satelita-odbiornik, parametr ten jest
odległości satelita-odbiornik, parametr ten jest
transmitowany przez satelitę,
transmitowany przez satelitę,
DOP - współczynników wiążących błąd pomiaru
DOP - współczynników wiążących błąd pomiaru
odległości do satelity z błędem wyznaczenia
odległości do satelity z błędem wyznaczenia
pozycji, wielkości DOP są pochodną
pozycji, wielkości DOP są pochodną
konfiguracji geometrycznej układu satelity-
konfiguracji geometrycznej układu satelity-
odbiornik.
odbiornik.

29
Parametry charakteryzujące
Parametry charakteryzujące
błąd pozycji
błąd pozycji
Spośród współczynników DOP wyróżnić należy:
Spośród współczynników DOP wyróżnić należy:
GDOP - Geometrical Dilution of Precision, geometryczne
GDOP - Geometrical Dilution of Precision, geometryczne
rozmycie dokładności, współczynnik ten jest odwrotnie
rozmycie dokładności, współczynnik ten jest odwrotnie
proporcjonalny do objętości bryły, której wierzchołkami
proporcjonalny do objętości bryły, której wierzchołkami
są pozycje obserwowanych satelitów i odbiornika,
są pozycje obserwowanych satelitów i odbiornika,
PDOP - Position Dilution of Precision, trójwymiarowe
PDOP - Position Dilution of Precision, trójwymiarowe
rozmycie dokładności, w pierwszym przybliżeniu
rozmycie dokładności, w pierwszym przybliżeniu
wielkość PDOP jest nieco mniejsza od GDOP,
wielkość PDOP jest nieco mniejsza od GDOP,
HDOP - Horizontal Dilution of Precision, poziome
HDOP - Horizontal Dilution of Precision, poziome
rozmycie dokładności,
rozmycie dokładności,
VDOP - Vertical Dilution of Precision, pionowe rozmycie
VDOP - Vertical Dilution of Precision, pionowe rozmycie
dokładności,
dokładności,
TDOP - Time Dilution of Precision, rozmycie dokładności
TDOP - Time Dilution of Precision, rozmycie dokładności
czasu.
czasu.
30
Parametry charakteryzujące
Parametry charakteryzujące
błąd pozycji
błąd pozycji
Good DOP
31
Parametry charakteryzujące
Parametry charakteryzujące
błąd pozycji
błąd pozycji
Poor DOP
QUALITY
DOP
Very Good
1-3
Good
4-5
Fair
6
Suspect
>6
32
Dokładność gps
Dokładność gps
PPS
CEP/50 % DRMS2DRMS/95%
Position
Horizontal
8 m
10.5 m
21 m
Vertical
9 m
14 m
28 m
Spherical
16 m
18 m
36 m
Velocity
Any Axis
0.07 m/sec
0.1 m/sec
0.2 m/sec
Time
GPS
17 nsec
26 nsec
52 nsec
UTC
68 nsec
100 nsec
200 nsec
33
Dokładność gps
Dokładność gps
SPS (C/A Code Only)
–
S/A On:
Horizontal: 100 meters
radial
Vertical: 156 meters
Time: 340
nanoseconds
–
S/A Off:
Horizontal: 22 meters
radial
Vertical: 28 meters
Time: 200
nanoseconds
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
Wyszukiwarka
Podobne podstrony:
GPS
B dy w technice p ywania
GPS
Sprawozdanie techniczne GPS
2003 4 gps
gie dy na wszystkie kolokwia
Instrukcja GPS Actea
Lab3 Cpp GPS opis
Egzamin GPS opracowane zagadnie Nieznany
narza dy zmyslow 2012
kol dy pl
egzamin gps II sem III, Studia, Geodezja, III SEMESTR, Nieposortowane, III SEMESTR, GPSZ II SEM
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
ćw 10 Parametry przewodów DY, LY, LgY
GPS Wykład 1
Komórkowy GPS, czyli nawigacja w (niby)chaosie
więcej podobnych podstron