Silniki krokowe
Co to jest silnik krokowy
Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca impulsy elektryczne w dyskretne ruchy mechaniczne. Oś silnika krokowego obraca się o niewielkie przyrosty kąta pod wpływem impulsów elektrycznych, podawanych w odpowiedniej kolejności. Obroty silnika są związane bezpośrednio z podawanymi impulsami na kilka sposobów. Kierunek obrotów osi jest ściśle związany z sekwencją podawanych impulsów, prędkość obrotów zależy od częstotliwości tych impulsów, a kąt obrotu - od ich ilości.
RODZAJE SILNIKÓW KROKOWYCH I ICH WŁAŚCIWOŚCI
Rodzaj zastosowanego silnika jego budowa oraz wynikające z tego różne możliwe sposoby sterowania sprawiają , że konstruując sterownik należy wziąć pod uwagę właściwości poszczególnych rodzajów silników ponieważ cechy silnika ściśle rzutują na sposoby rozwiązania sterowania a w konsekwencji na właściwości całego układu napędowego.
W niniejszym opisie omówiono różne rodzaje silników krokowych i ich właściwości. Poruszono zagadnienia z różnymi stanami pracy silników, możliwymi sposobami sterowania oraz sposoby eliminacji niekorzystnych zjawisk występujących podczas ich pracy a w szczególności ograniczenia drgań i rezonansów.
BUDOWA SILNIKÓW KROKOWYCH I ICH WŁAŚCIWOŚCI
Obecnie istnieje duża liczba różnorodnych typów silników krokowych i jest możliwe pojawienie się nowych. W chwili obecnej wydaje się być aktualna klasyfikacja przedstawiona na rysunku poniżej.
Zalety i wady silników krokowych.
Zalety:
Kąt obrotu silnika jest proporcjonalny do ilości impulsów wejściowych.
Silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane).
Precyzyjne pozycjonowanie i powtarzalność ruchu - dobre silniki krokowe mają dokładność ok. 3 - 5% kroku i błąd ten nie kumuluje się z kroku na krok.
Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku.
Niezawodne - ze względu na brak szczotek. żywotność silnika zależy zatem tylko od żywotności łożysk.
Zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu.
Możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem umocowanym bezpośrednio na osi.
Szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest proporcjonalna do częstotliwości impulsów wejściowych.
Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego sterowania w pętli otwartej. Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia zwrotnego - informacji o położeniu. Takie sterowanie eliminuje potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego, takich jak enkodery optoelektroniczne. Pozycje znajduje się zliczając impulsy wejściowe.
Wady:
Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
Trudności przy pracy z bardzo dużymi prędkościami.
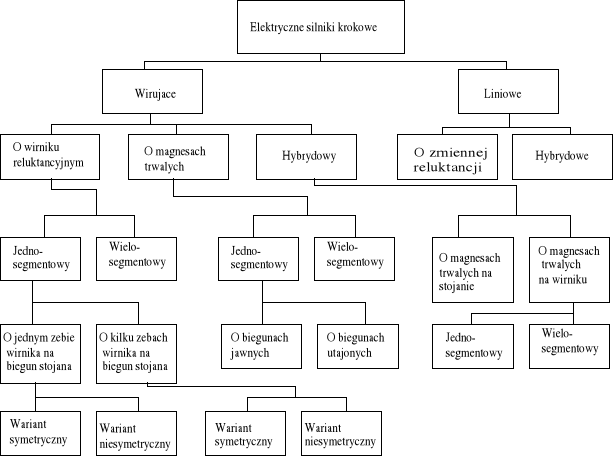
Rysunek 1. Klasyfikacja silników krokowych.
Podstawowe rodzaje silników krokowych to:
Silniki o zmiennej reluktancji
Silniki z magnesem trwałym
Silniki hybrydowe
Silnik o zmiennej reluktancji VR (od ang. Variable Reluctance)
Najbardziej ogólny podział silników krokowych dotyczy podziału ze względu na rodzaj ruchu na silniki wirujące i liniowe.
Silnik o zmiennej reluktancji
Ten typ silnika był przez długi czas bardzo popularny. Jest on chyba najprostszy ze strukturalnego punktu widzenia.
Silnik taki składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane prądem stałym, bieguny namagnesowują się. Ruch pojawia się na skutek przyciągania zębów rotora przez zasilane bieguny stojana.
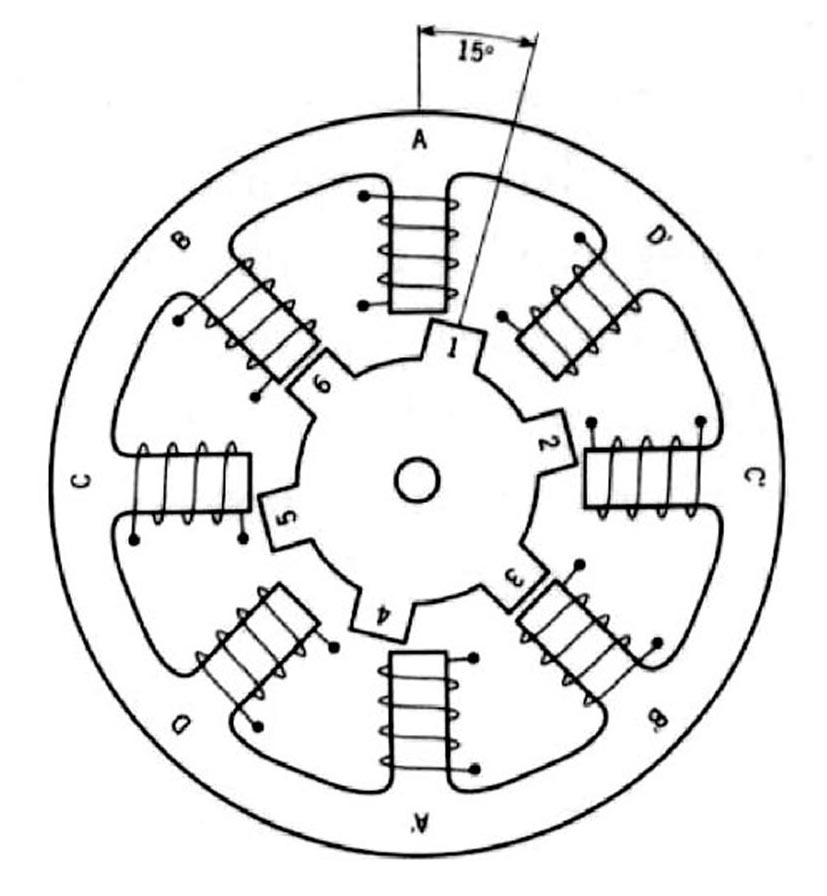
Oprócz szeroko stosowanych jednosegmentowych silników krokowych często bywają stosowane silniki wielosegmentowe. Wśród jednosegmentowych silników krokowych o wirniku reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika. Obydwie odmiany mogą być wykonana w wariancie symetrycznym bądź niesymetrycznym. W budowie symetrycznej uzwojenia dwóch przeciwległych biegunów tworzą pasmo natomiast budowa niesymetryczna charakteryzuje się tym, że całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. Działanie silnika skokowego o wirniku reluktancyjnym opiera się na wykorzystaniu momentu reluktancyjnego. Silnik ten składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane stałym prądem, bieguny namagnesowują się. Ruch pojawia się na skutek przyciągania zębów rotora przez zasilane bieguny stojana. Zasadę działania przedstawia poniższy rysunek .
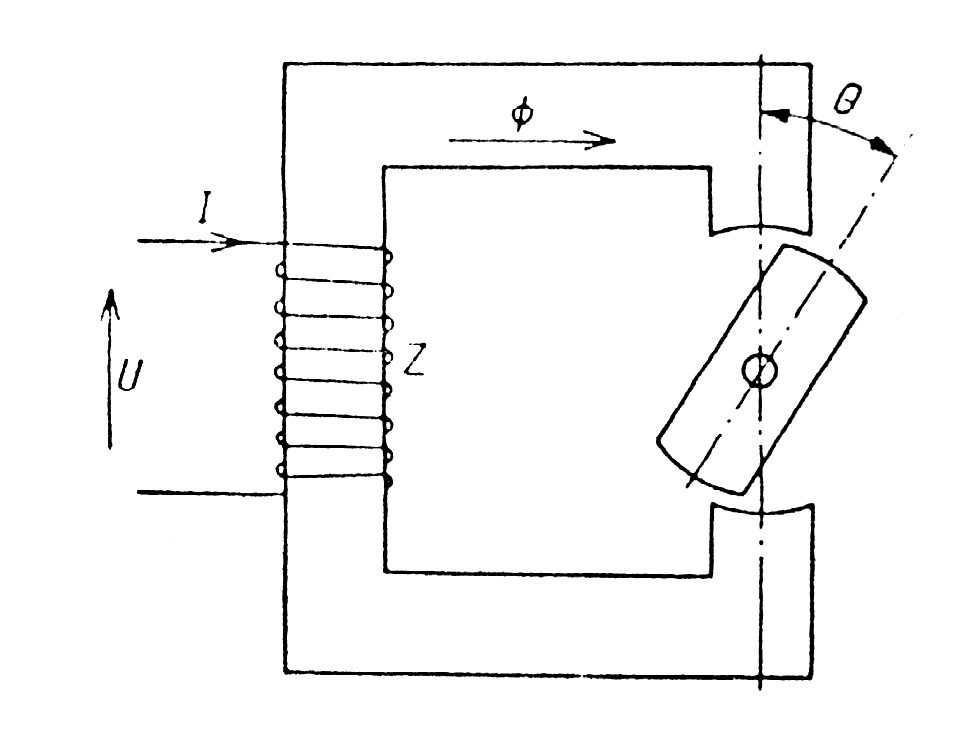
Rysunek 3. Powstawanie momentu reluktancyjnego. [1]
Strumień w obwodzie magnetycznym opisany jest wzorem
ၦ=Iz / R m
i jest funkcją przepływu Iz oraz reluktancji magnetycznego wykazują linie pola dążenie do zamknięcia w obwodzie o najmniejszej reluktancji. W ten sposób powstaje moment obrotowy, który dąży do ustawienia wirnika w położeniu ၱ = 0.
Widok silnika reluktancyjnego przedstawiono poniżej.
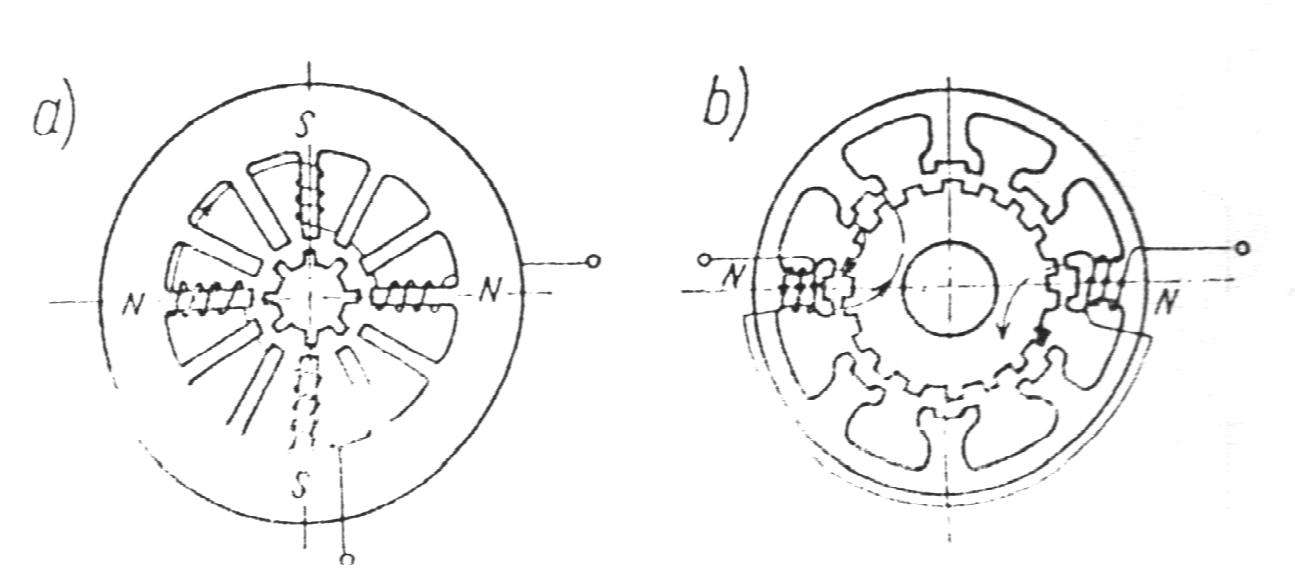
Rysunek 4 .Silnik krokowy o wirniku reluktancyjnym
o jednym zębie wirnika na biegun stojana
b) o kilku zębach na biegun stojana
Silnik z magnesem trwałym PM (od ang. Permanent Magnet)
Silniki krokowe o magnesach stałych mogą być wykonane w wersji jednosegmentowej i wielosegmentowej. Silnik jednosegmentowy może mieć na wirniku podobnie do klasycznej maszyny synchronicznej bieguny jawne lub utajone.
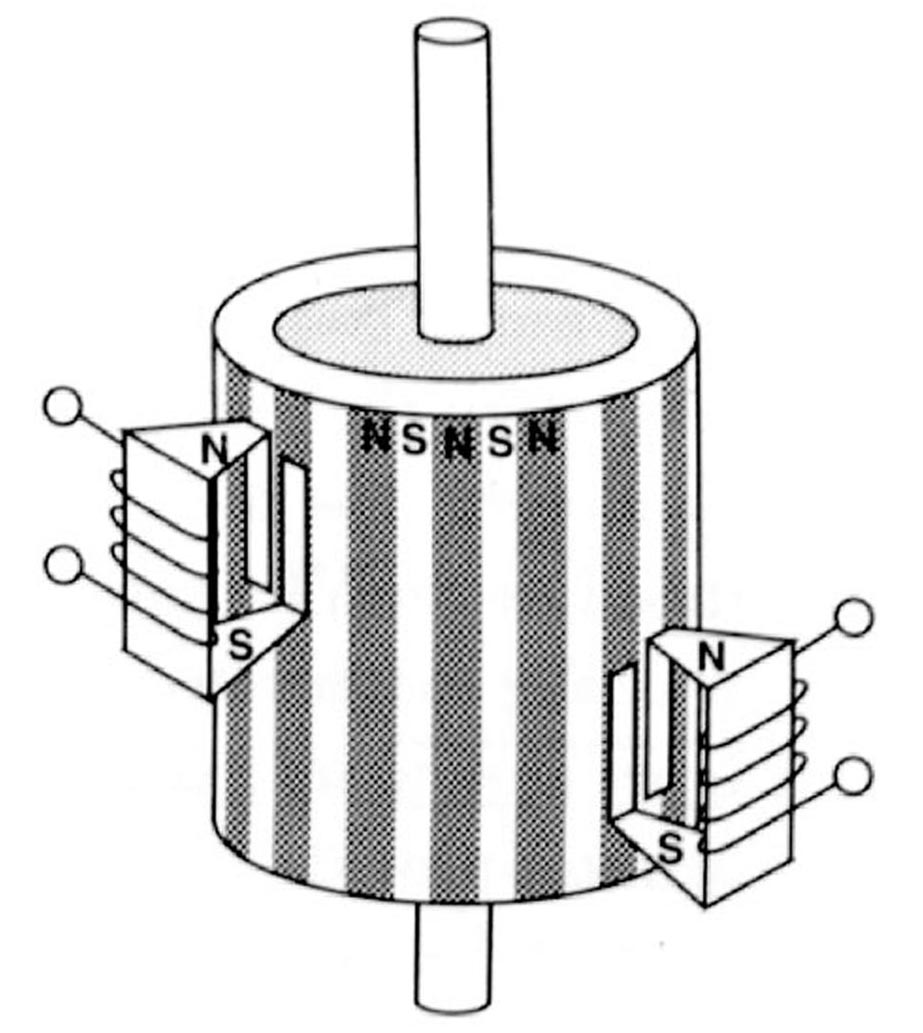
Silniki krokowe o magnesach trwałych na wirniku można również podzielić na magnesowane osiowo lub promieniowo. Silnik krokowy o wirniku czynnym często nazywany jest również 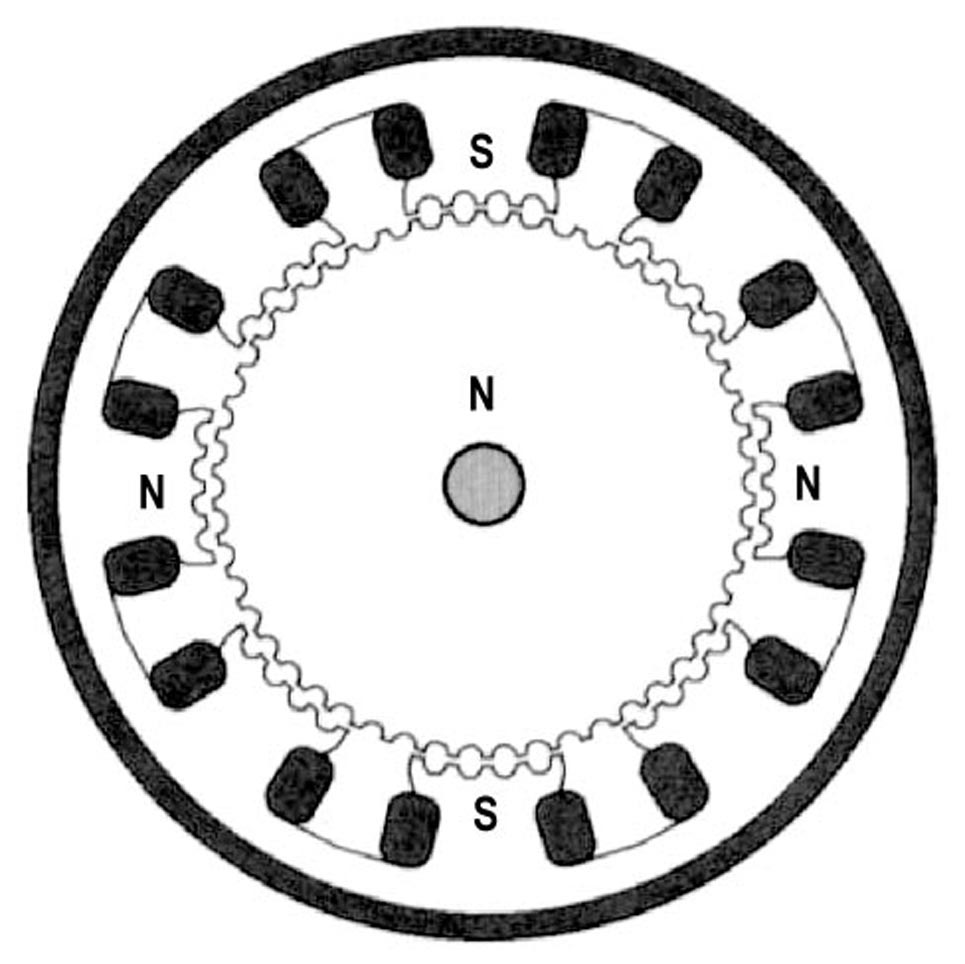
silnikiem kubkowymi. Jest to silniki o wirniku wytwarzającym strumień magnetyczny i o stojanie z uzwojeniem sterującym. Wirnik silnika stanowią magnesy trwałe. Silnik tego typu jest tani, charakteryzuje się niską rozdzielczością o typowych wartościach kąta 7,50-150 tj. 24-48 kroków na obrót. Rotor silnika nie posiada zębów lecz jest namagnesowany naprzemiennie biegunami N i S tak, iż bieguny te są usytuowane w linii prostej równoległej do osi rotora Namagnesowane bieguny rotora wpływają na zwiększenie indukcji magnetycznej, dlatego silnik z magnesem trwałym w porównaniu z silnikami o zmiennej reluktancji mają lepszą charakterystykę momentową.
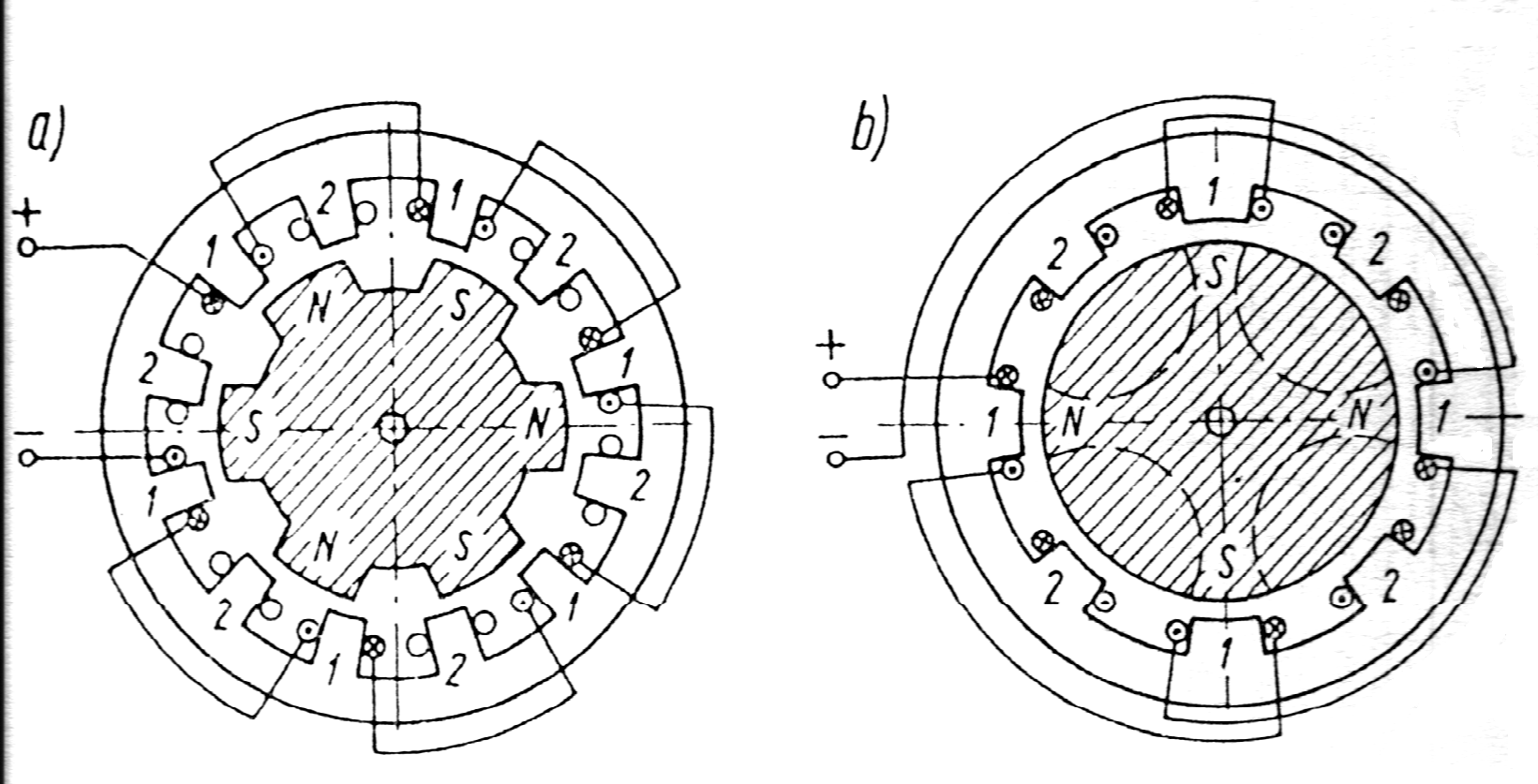
Rysunek 2.Silnik krokowy o magnesach trwałych z biegunami
a) jawnymi
b) utajonymi.
Silnik hybrydowy HB (od ang. HyBrid)
Są najnowocześniejszym typem silników krokowych. Silnik hybrydowy jest bardziej kosztownym niż silnik z magnesem trwałym cechuje się za to lepszymi parametrami jeśli chodzi o rozdzielczość i szybkość. Zasada działania silnika opiera się na tym, że magnes trwały umieszczony na wirniku lub na stojanie wytwarza jednako biegunowy strumień magnetyczny, który zamyka się w obwodzie magnetycznym: stojan -szczelina powietrzna-wirnik. Po zasileniu uzwojenia stojana impulsem sterującym, wzbudzony strumień magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak, by osie zębów stojana i wirnika bieguna o strumieniu wzmacniającym pole magnetyczne pokryły się.
Typowe kąty silnika hybrydowego mieszczą się w zakresie 3,6-0,9 tj. 100- 400 kroków na obrót. Silnik hybrydowy łączy w sobie zalety silnika ze zmienną reluktancją i silnika z magnesem stałym. Rotor silnika ma wiele zębów i posiada osiowa namagnesowane magnesy umieszczone koncentrycznie wokół osi.
Zęby rotora zapewniają lepszą drogę przepływowi magnetycznemu co polepsza charakterystyki momentu spoczynkowego i dynamicznego w porównaniu z silnikami z magnesem stałym i reluktancyjnym
Istnieją też jeszcze inne typy silników krokowych. Jednym z nich jest silnik 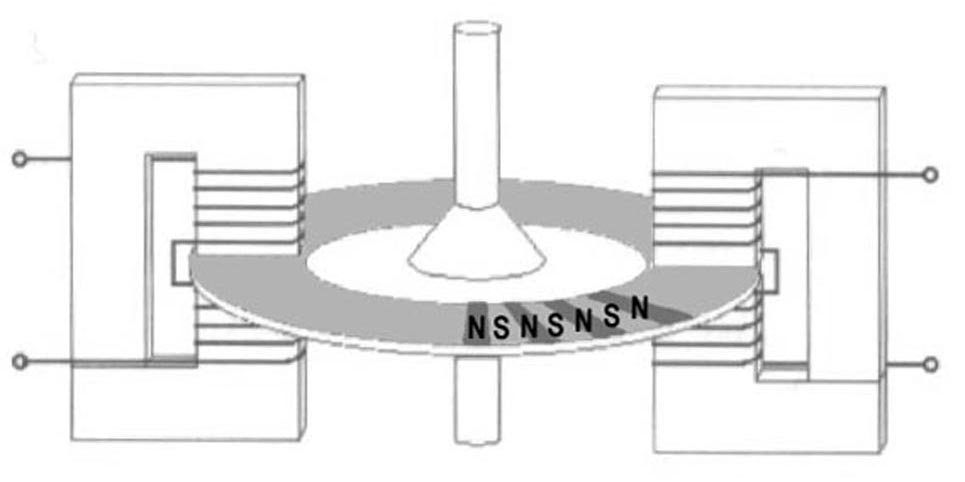
tarczowy. Rotor takiego silnika ma kształt dysku z naniesionymi nań magnesami z metali ziem rzadkich. Silnik tarczowy ma pewne zalety, takie jak bardzo mała bezwładność i optymalny obwód magnetyczny bez wzajemnego wpływu uzwojeń stojana. W pewnych zastosowaniach cechy te są niezbędne.
Moc silnika.
Poziomy mocy silników sterowanych przy pomocy układów scalonych mieszczą się zwykle w zakresie od poniżej 1 W dla bardzo małych silników do 10 - 20 W dla większych. Dane dostarczane przez producentów rzadko zawierają maksymalny poziom wydzielanej mocy czy charakterystykę cieplną. Możemy je jednak wyznaczyć z zależności . Na przykład gdy silnik jest zasilany napięciem 6 V przy prądzie 1 A, na fazę wydziela się na nim moc 12 W (przy zasilaniu obu faz). Normalną praktyką jest eksploatowanie silnika krokowego przy poziomie wydzielania mocy, przy którym temperatura obudowy silnika osiąga 65°C (więcej niż temperatura otoczenia w spokojnym powietrzu). Jeśli zatem silnik może by zamontowany na radiatorze, można zwiększyć dopuszczalny poziom wydzielanej mocy. Ważne jest, aby silnik był zaprojektowany do pracy i pracował przy maksymalnym wydzielaniu mocy po to, by był on wydajny z punktu widzenia rozmiaru, mocy wyjściowej i kosztu.
KROKOWE SILNIKI LINIOWE
Najczęściej są stosowane liniowe silniki skokowe reluktancyjne i hybrydowe znaczne rzadziej elektrodynamiczne. Liniowy reluktancyjny silnik krokowy jest odpowiednikiem wielosegmentowego wirującego reluktancyjnego silnika skokowego. Rdzeń stojana i nabiegunniki są wykonane z blachy elektrotechnicznej. Hybrydowy, liniowy silnik krokowy składa się z ruchomego biegunnika i nieruchomego stojana. Stojan stanowi uzębiona płyta z materiału ferromagnetycznego. Część ruchoma składa się z dwu rdzeni ferromagnetycznych, pomiędzy którymi znajduje się magnes trwały. Na każdym rdzeniu znajduje się uzwojenie. Rdzenie mają zęby ,które znajdują się w takiej odległości od siebie, by odpowiadały podziałce zębowej stojana .Zaletą liniowego silnika skokowego jest bezpośrednia zamiana impulsowych sygnałów wejściowych na przemieszczenie liniowe. Stwierdzono ,że liniowe silniki skokowe mają większą dokładność i sprawność oraz lepsze charakterystyki. dynamiczne w porównaniu z wirującymi silnikami krokowymi w połączeniu z mechanizmami przetwarzania ruchu obrotowego na postępowy.
RODZAJE UZWOJEŃ SILNIKÓW KROKOWYCH
Klasyfikacja silników krokowych rozróżnia ze względów na ilość segmentów silniki jedno i wielosegmentowe. Zwiększenie ilości segmentów umożliwia uzyskanie przy kolejnym zasilaniu impulsami uzwojeń kolejnych segmentów dużej liczby skoków o małym kącie.
Z ilością segmentów związana jest ściśle ilość pasm uzwojeń silnika. Należy zauważyć, że istnieją dwa sposoby wykonania pasma symetryczne i niesymetryczne. W konstrukcji symetrycznej uzwojenia dwu przeciwległych biegunów stojana tworzą pasmo. Rozwiązanie niesymetryczne charakteryzuje się tym, że całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. Silniki krokowe różnią się pod względem liczby pasm uzwojenia. Każde pasmo jest częścią uzwojenia i jest zasilane impulsami. Rozróżnia się jedno-, dwu-, trzy-, cztero-, lub pięciopasmowe silniki krokowe. Od liczby pasm zależą w dużej mierze właściwości silnika krokowego. Wraz ze wzrostem liczby pasm silnika zwiększa się moment obrotowy i liczba skoków na obrót przy malejącej wartości skoku. Zwiększenie liczby pasm powoduje zmniejszenie pulsacji momentu obrotowego w efekcie dobre tłumienie oscylacji i ograniczenie zjawiska rezonansu.
Kiedy używać silnika krokowego.
Użycie silnika krokowego może bywa trafnym wyborem, kiedy tylko wymagany jest kontrolowany ruch. Mogą być one użyte tam, gdzie trzeba sterować kątem, prędkością, pozycją lub synchronizmem. Z powodu wcześniej wymienionych zalet silniki krokowe znalazły wiele zastosowań np. w drukarkach, ploterach, sprzęcie biurowym, napędach dysków, sprzęcie medycznym, faksach, napędzie przemysłowym i wielu innych. Można je zastosować również zamiast napędu z silnikiem prądu stałego i przekładnią, bez sterowania pozycją - podając tylko impulsy o odpowiedniej częstotliwości.
Silniki krokowe miniaturowe
rozmiarach 2,2" dostarcza momentu 16 uncj
i Dane techniczne miniaturowych silników
średnica ¾" krok 15º |
|
średnica 1" krok 15º lub 7,5º |
|
średnica 1,4" krok 15º lub 7,5º |
|
średnica 1,8" krok 7,5º |
|
średnica 2,2" krok 15º |
Charakterystyki miniaturowych silników
średnica ¾" krok 15º |
|
średnica 1" krok 15º lub 7,5º |
|
średnica 1,4" krok 15º lub 7,5º |
|
średnica 1,8" krok 7,5º |
|
średnica 2,2" krok 15º |
S
ów
|
Bipolarny |
Q2-Q3 |
Q1-Q4 |
Q6-Q7 |
Q5-Q8 |
|
|
Unipolarny |
Q1 |
Q2 |
Q3 |
Q4 |
|
|
Stap |
|
|
|
|
|
|
1 |
ON |
OFF |
ON |
OFF |
|
|
2 |
OFF |
ON |
ON |
OFF |
|
|
3 |
OFF |
ON |
OFF |
ON |
|
|
4 |
ON |
OFF |
OFF |
ON |
|
|
1 |
ON |
OFF |
ON |
OFF |
|
Schemat podłączenia:
Wyszukiwarka
Podobne podstrony:
Ploter, Mechatronika, Elektronika
Mechatronika Elektronika Harmonogram Laboratorium
Sprawdzian elektrotechnika, Mechatronika, Elektronika
Lista firm, elektronika, mechatronika i niewiadomo co
MASZYNY, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
Elekrotechnika sprawko 1, Studia - Mechatronika, III semestr, Elektrotechnika
Organizacja pracy, elektronika, mechatronika i niewiadomo co
1 Mechatronika mechanika i elektronika
Wnioskicw4, Mechatronika, Rok II, Semestr III, Elektronika, Lab
egzamin z forum, Mechatronika PP, Elektronika analogowa i cyfrowa
Formatka na laboratoria z Elekroniki analogowej i cyfrowej, Politechnika Poznańska, Mechatronika, Se
Opracowanie koducw4 (1), Mechatronika, Rok II, Semestr III, Elektronika, Lab
Sprawozdanie trójfaz silnika, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
Ręczna spawanie łukowe elektrodami otulonymi, studia, studia Politechnika Poznańska - BMiZ - Mechatr
Wzór opisu teczki, Mechatronika, Semestr V, Elektrotechnika i napedy
zad5, Politechnika Poznańska, Mechatronika, Semestr 03, Elektrotechnika - ćwiczenia, Elektrotechnika
sprawko generator, MECHATRONIKA, IV Semestr, Elektronika Analogowa i Cyfrowa
Elektrotechnika egzamin pytania+ odpowiedzi, Mechatronika pollub, semestr I, Podstawy Elektrotechnik
Projekt zaliczenie 2012, MECHATRONIKA, IV Semestr, Projektowanie Układów Elektronicznych
więcej podobnych podstron