Wojskowa Akademia Techniczna
Wydział Elektroniki
Instytut Systemów Elektronicznych
Zakład Systemów Informacyjno-Pomiarowych
PODSTAWY METROLOGII
Ćwiczenie nr 2 - część teoretyczna
Temat:
BADANIE WŁAŚCIWOŚCI PRZYRZĄDÓW
DO POMIARU PODSTAWOWYCH WIELKOŚCI ELEKTRYCZNYCH
SPIS TREŚCI
1. Odczyt wartości mierzonej na podstawie wskazań przyrządów analogowych
Cel: Nauczyć korzystania z podstawowych przyrządów pomiarowych. Zapoznać z zasadami łączenia obwodów elektrycznych, metodami zapisu wyniku pomiaru i wyznaczaniem błędu granicznego i dokładności przy pomiarach bezpośrednich i pośrednich z wykorzystaniem przyrządów analogowych i cyfrowych.
1. Odczyt wartości mierzonej na podstawie wskazań przyrządów analogowych
Jednym z podstawowych parametrów przyrządów analogowych (wskazówkowych) jest stała miernika. Jeżeli miernik jest wyposażony we wskaźnik, który ma naniesioną podziałkę liniową, to stała miernika jest równa stałej podziałki. Stała podziałki jest to stosunek wartości nominalnej podzakresu pomiarowego XN do maksymalnej liczby działek na podziałce miernika ၡmax

(1)
W przyrządach o podziałce liniowej odczytu wartości mierzonej dokonuje się mnożąc liczbę działek ၡ, o którą wychyliła się wskazówka miernika od położenia początkowego przez stałą podziałki S. Wynik pomiaru będzie więc równy
![]()
(2)
Jeżeli miernik ma podziałkę silnie nieliniową (różne odległości między kolejnymi działkami), to należy określić stałą fragmentu podziałki. Taka sytuacja zachodzi w omomierzach analogowych. Przyjmuje się założenie, że na podziałce nieliniowej można określić pewne przedziały, w których jest ona liniowa. Na ogół granice takich przedziałów są opisane działkami oznaczonymi liczbowo. Wynik pomiaru będzie równy
![]()
(3)
gdzie:
ၡ' - liczba działek, o które odchyliła się wskazówka od początku rozpatrywanego przedziału;
၄ၡ ွ ၡmax ိ ၡmin - szerokość przedziału liniowego w działkach;
၄X ွ Xmax ိ Xmin przyrost wartości wielkości mierzonej powodującej zmianę położenia wskazówki od położenia ၡmin do ၡmax.
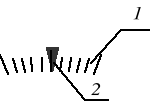
Wadą przyrządów analogowych jest możliwość niedokładnego odczytu wartości wskazywanej przez urządzenie odczytowe miernika. Urządzenie to składa się z podzielni, na której naniesiona jest podziałka oraz wskazówki - materialnej (rys.1) lub świetlnej (rys.3). Podziałka jest to uporządkowany zbiór znaków (najczęściej kresek - wskazów). Dla ułatwienia odczytu niektóre z tych znaków mogą być opisane cyframi. Część podziałki między sąsiednimi wskazami nazywamy działką elementarną. Długość podziałki oraz liczba działek są ściśle zależne od klasy oraz gabarytów miernika. Im klasa wyższa tym podziałka dłuższa, a liczba działek większa [1].
Rys.1. Wskazówka nożowa i skala lustrzana: 1 - lustro, 2 - wskazówka
Charakterystyczną cechą mierników analogowych jest zdolność rozdzielcza, która określa najmniejszą część działki możliwą do odczytania. W zależności od odległości między sąsiednimi wskazami, przyjmuje się, że zdolność rozdzielcza wynosi 0.5, 0.2 lub 0.1 mm (działki). Przyjęcie przez eksperymentatora zbyt małej zdolności rozdzielczej zwiększa błąd odczytu.
Błąd odczytu ma charakter błędu przypadkowego i jest zależny przede wszystkim od staranności eksperymentatora. Przy pomiarach jednokrotnych błąd taki jest trudny lub wręcz niemożliwy do oszacowania. Błąd odczytu może zostać także popełniony, jeśli eksperymentator nie patrzy na wskazówkę prostopadle do płaszczyzny podzielni. Jest to błąd krzywego patrzenia, nazywany także błędem paralaksy. Istotę tego błędu przedstawia rys. 2.
Rys.2. Sposób powstawania błędu paralaksy.
Błąd paralaksy można wyeliminować patrząc na wskazówkę prostopadle do podzielni. Ułatwia to umieszczone pod wskazówką lusterko (rys.2) lub stosowanie wskazówki świetlnej (rys.3). Wskazówka świetlna powstaje na zasadzie odbicia światła z żarówki od lustereczka, na którym jest naniesiony znacznik wskazówki. Lustereczko jest przymocowane do osi, której kąt odchylenia od położenia równowagi zależy od wartości wielkości mierzonej. Przemieszczająca się wzdłuż podziałki plamka uniemożliwia powstanie błędu paralaksy, ponieważ cień wskazówki znajduje się bezpośrednio na podzielni.
Rys.3. Skala i wskazówka świetlna: 1 - podziałka,
2 - plamka świetlna ze znacznikiem wskazówki
2. Odczyt wartości mierzonej z przyrządów cyfrowych
Przyrządy cyfrowe są wygodniejsze w użyciu. Dzięki zastosowaniu wyświetlacza cyfrowego nie ma konieczności stosowania wzoru (2) lub (3), nie popełnia się także subiektywnych błędów związanych z odczytem wskazań. Niestety zastosowanie tego rozwiązania może doprowadzić do powstania błędów grubych. Na wyświetlaczu oprócz cyfr składających się na wynik wyświetlany jest także przecinek lub kropka dziesiętna. Wyświetlacze szczególnie typu LED charakteryzują się dość sporą zawodnością i bardzo często zdarza się, że przecinek znak ten nie jest wyświetlany ze względu na uszkodzenie wyświetlacza. Warto także przyjrzeć się jak skonstruowany jest wyświetlacz pojedynczej cyfry. Jego wygląd przedstawiono na rys.4.
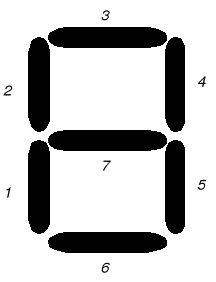
Rys.4. Wyświetlacz siedmiosegmentowy
Łatwo zauważyć, że uszkodzenie segmentu 7 spowoduje nie rozróżnianie cyfr 8 i 0. Natomiast uszkodzenie segmentu czwartego uniemożliwi rozróżnienie cyfr 6 i 8. Zanim użytkownik zorientuje się o takim uszkodzeniu może minąć sporo czasu a pomiary będą niewłaściwe.
3. Błąd graniczny i dokładność pomiaru przy pomiarach jednokrotnych
Wskazanie przyrządu bez podania granic błędu, z jakim pomiar został wykonany, ze względów poznawczych nie ma żadnego znaczenia. Można nawet stwierdzić, że pojęcia pomiar i błąd pomiaru lub jego dokładność są pojęciami nierozerwalnymi. Wynik pomiaru Xr powinien być zawsze przedstawiany w postaci
![]()
(4)
gdzie:
Xm - wartość zmierzona zapisana z uwzględnieniem odpowiedniej liczby miejsc znaczących;
၄gX - błąd graniczny pomiaru.
Ze względu na wymaganą dokładność, pomiary można podzielić na:
- laboratoryjne wysokiej precyzji (ၤ%X < 0,05%);
- laboratoryjne średniej dokładności (0,05% Ⴃ ၤ%X Ⴃ 0,5%);
- techniczne (ၤ%X > 0,5%).
W zależności od tego do rachunku błędów podchodzi się z różną precyzją.
Poniżej omówiono metodykę wyznaczania błędów przy pomiarach technicznych. Pomiar danej wielkości odbywa się na ogół jednokrotnie a błąd ma na ogół charakter systematyczny ograniczony dokładnością użytych przyrządów (jego błędem podstawowym i błędami dodatkowymi. Ogólnie można spotkać dwa przypadki:
- pomiar bezpośredni (wartość wielkości mierzonej jest określana na podstawie wskazania jednego przyrządu);
- pomiar pośredni (wyznaczana wielkość jest funkcją kilku wielkości mierzonych bezpośrednio).
3.1. Pomiary bezpośrednie
3.1.1. Błąd graniczny pomiaru przyrządów analogowych
Jeśli klasa przyrządu pomiarowego jest oznaczana symbolem kl.d np. 1,5 (co oznacza 1,5%), to błąd graniczny pomiaru wielkości X wyznaczany jest za pomocą wyrażenia
![]()
(5)
gdzie:
XN - wartość nominalna (maksymalna) zakresu pomiarowego (dla przyrządów wielozakresowych jest to wartość maksymalna podzakresu pomiarowego, na którym był wykonywany pomiar).
Istotne jest to, że wartość błędu granicznego pomiaru jest stała na danym podzakresie miernika i nie zależy od wartości wielkości mierzonej Xm.
Jeśli dokładność przyrządu pomiarowego jest wyrażana w procentach wartości mierzonej, co jest oznaczane na podzielni miernika wychyłowego, jako kl.d, np. 1,5, to przy wyznaczaniu błędu granicznego pomiaru korzysta się z zależności
(6)
gdzie:
Xm - wartość mierzona badanej wielkości (wartość, którą wskazał miernik).
Wartość błędu granicznego jest w tym przypadku zależna od wartości wielkości mierzonej i nie jest stała na danym podzakresie miernika.
W niektórych analogowych elektronicznych przyrządach pomiarowych można spotkać się z wyrażeniem opisującym zależność błędu granicznego pomiaru danym przyrządem zarówno od wartości mierzonej Xm, jak i od wartości nominalnej zakresu pomiarowego XN.
Wyrażenie to jest na ogół podawane w postaci:
![]()
(7)
gdzie:
a, b - stałe charakterystyczne dla danego przyrządu.
Taki sposób opisu właściwości dokładnościowych miernika jest stosowany wtedy, gdy odpowiednią zależność udało się wykryć w procesie produkcyjnym przyrządu.
Warto zauważyć, że w granicznym przypadku, jeśli Xm = XN , to ၄gX = Ⴑ (a% + b%) XN .
Przez analogię z wyrażeniem (5) można zapisać kl.d = a% + b%.
Czasami składowa błędu b% XN jest podawana jawnie w jednostkach wielkości mierzonej.
3.1.2. Błąd graniczny pomiaru przyrządów cyfrowych
Dla cyfrowych przyrządów pomiarowych klasa dokładności nie jest zdefiniowana. Właściwości dokładnościowe są opisywane za pomocą błędu bezwzględnego wyrażanego najczęściej w postaci (7) lub (8).
![]()
(8)
gdzie:
n - liczba cyfr na najmniej znaczącej pozycji wyświetlacza.
Znając zakres pomiarowy oraz rozdzielczość cyfrowego przyrządu pomiarowego można wyznaczyć przedział kwantowania q wyrażany w jednostkach wielkości mierzonej. Następnie liczbę q mnoży się przez liczbę n podaną w wyrażeniu (10). W ten sposób otrzymuje się składową błędu proporcjonalną do wartości nominalnej podzakresu. Wyrażenie (10) jest innym sposobem wyrażenia zależności (9). W tych wyrażeniach stałe a i b mogą być wyrażone w procentach lub nie.
W przypadku cyfrowych przyrządów pomiarowych popełniany jest jeszcze błąd dyskretyzacji wynoszący Ⴑ 1 cyfra na najmniej znaczącej pozycji wyświetlacza. W prawidłowo skonstruowanym mierniku błąd ten nie ma większego znaczenia, ponieważ jest mniejszy od błędu analogowego 2 do 5 razy a nawet więcej. Zasada ta nie dotyczy częstościomierzy-czasomierzy cyfrowych, które konstruuje się tak, aby właśnie błąd dyskretyzacji decydował o dokładności pomiaru.
3.1.3. Dokładność pomiaru
Dokładnością pomiaru nazywa się stosunek błędu granicznego do wartości mierzonej
(9)
Jak widać dokładność pomiaru może się znacznie różnić od dokładności przyrządu pomiarowego.
Jeśli błąd graniczny wyrażony będzie równaniem (5) to dokładność pomiaru jest równa:
![]()
(10)
Zgodnie z powyższym równaniem dokładność pomiaru jest nie lepsza od klasy dokładności przyrządu pomiarowego i jest tym mniejsza im wskazanie przyrządu jest mniejsze. Nasuwa się więc wniosek, że ze względu na dokładność pomiaru zakres pomiarowy należy dobierać tak aby zapewnić możliwie największe wychylenie wskazówki miernika.
Jeśli do wzoru (9) podstawimy równanie (6), to okaże się, że w miernikach z klasą wyrażoną jako procent wartości mierzonej dokładność pomiaru jest równa dokładności przyrządu w całym zakresie wskazań.
ၤ%R = kl.d (11)
3.2. Pomiary pośrednie
Przy pomiarach pośrednich zakłada się, że funkcja opisująca wielkość mierzoną ma postać
![]()
(12)
Graniczny błąd pomiaru określony jest zależnością:
(13)
lub w postaci uproszczonej (błąd najgorszego przypadku) jako:
![]()
(14)
gdzie:
၄gXi - błąd graniczny i-tej wielkość mierzonej bezpośrednio określony tak jak w przypadku pomiarów bezpośrednich.
Tabela 1
Zależność funkcyjna |
Sposób propagacji błędu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


Wyrażenia (13) i (14) określają tzw. prawo przenoszenia błędów. Powyżej przedstawiono tabelę, w której zawarto sposób przenoszenia się błędów dla wybranych zależności funkcyjnych.
Przy pomiarze pośrednim wynik pomiaru zapisujemy w postaci:
![]()
(15)
a dokładność pomiaru jest równa:
(16)
Czasami, chcąc wyznaczyć błąd graniczny łatwiej jest wyznaczyć błąd względny pomiaru (dokładność) a następnie przekształcić równanie (21) do odpowiedniej postaci.
4. Dokładność zapisu wyniku i jego błędu
Jednym z podstawowych warunków sporządzenia „dobrego” sprawozdania jest prawidłowy zapis wyników pomiarów i obliczeń. O sposobie zapisu wyników decydują następująca zasady:
1. Wartość liczbowa uzyskana z pomiaru powinna mieć taką liczbę cyfr znaczących, aby tylko ostatnia lub przedostatnia były niepewne (zmieniały się w trakcie pomiaru). Cyframi znaczącymi są cyfry 0Ⴘ9 z wyjątkiem cyfry 0 stojącej na początku ułamka dziesiętnego lub na końcu liczby, chyba, że są przesłanki wskazujące na to, że 0 na końcu też jest znaczące. Dla zaznaczenia ilości cyfr znaczących, wygodnie jest posługiwać się mnożnikiem 10n lub stosować odpowiednie jednostki pochodne danej wielkości. W tabeli 2 pokazano odpowiedni przykład.
Tabela 2
Wartość liczbowa |
Liczba cyfr znaczących |
812 |
trzy |
1520 = 1,52 თ 103 |
cztery lub trzy |
0,032 = 32 თ 10-3 |
dwie |
0,320 = 32 თ 10-2 |
dwie |
Jeśli będziemy mieli do czynienia z serią pomiarową, w której jeden z wielu z wyników kończy się zerem, to 0 jest także cyfrą znaczącą, ponieważ zapis wszystkich wyników powinien się odbywać z dokładnością do tej samej liczby miejsc znaczących.
Stosowanie się do tej zasady daje pewność - jaka jest wartość ostatniej cyfry znaczącej i nie ma obaw, że wpisujący zapomniał ją na przykład dopisać. Przykład pokazano w tabeli 3.
Tabela 3
Zły zapis serii pomiarowej |
Dobry zapis serii pomiarowej |
1234,1 1234,4 1235,1 1234 1234,2 |
1234,1 1234,4 1235,1 1234,0 1234,2 |
2. Przy dodawaniu i odejmowaniu uwzględniamy tylko te cyfry znaczące, które występują we wszystkich składnikach. Przykład pokazano w tabeli 4.
Tabela 4
Źle |
Dobrze |
271,2 14,51 + 0,125 285,835 |
271,2 14,5 + 0,1 285,8 |
3. W celu dokonania właściwego zaokrąglenia wyniku, działania matematyczne przeprowadza się z uwzględnieniem najwyżej jednej cyfry znaczącej więcej niż w końcowym wyniku obliczeń.
4. Zaokrąglenia wyniku dokonujemy w ten sposób, że jeżeli następna cyfra po cyfrze najmniej znaczącej jest mniejsza od 5, to najmniejszą cyfrę znaczącą pozostawiamy bez zmian, a jeżeli większa to najmniejszą cyfrę znaczącą zwiększamy o 1. Jeżeli następna cyfra po najmniejszej cyfrze znaczącej jest równa 5, to wynik zwiększamy o jeden na najmniej znaczącej cyfrze, jeżeli jest ona nie parzysta a zmniejszamy, jeżeli jest ona parzysta. Przykład:
16,822 Ⴛ 16,82
168,88 Ⴛ 168,9
162,15 Ⴛ 162,2
162,25 Ⴛ 162,2
Warto w tym miejscu zwrócić uwagę na fakt, że zaokrąglając liczby np. 121,5 oraz 122,5 do liczb całkowitych otrzymamy ten sam wynik 122. W związku ze specyficzną rolą cyfry 5 w zaokrąglaniu wyników dobrze jest także wiedzieć, jaka cyfra występuje po niej, ponieważ liczbę 122,51 można już zaokrąglić do liczby 123, a nie do 122.
5. W związku z tym, że błąd jest miarą niewiarygodności ostatniej cyfry znaczącej wartości liczbowej (lub dwóch ostatnich cyfr), nie zapisuje się go z większą dokładnością niż za pomocą jednej cyfry znaczącej. Błąd można zapisać z dokładnością do dwóch cyfr znaczących tylko w następujących sytuacjach:
przy bardzo dokładnych pomiarach;
jeśli ma być użyty do dalszych obliczeń;
jeśli pierwszą cyfrą znaczącą jest 1 (lub 2) [2]. W tabeli 5 podano odpowiednie przykłady z wyjaśnieniami.
Tabela 5
Wynik z błędem nie zaokrąglonym |
Wynik z błędem zaokrąglonym |
Wyjaśnienia |
12113 Ⴑ 31 |
12110 Ⴑ 30 |
Zapis typowy. Zaokrąglenie błędu spowodowało zmniejszenie cyfr znaczących w wyniku. |
122132567 Ⴑ 31,6 |
122132567 Ⴑ 32 |
Dokładny pomiar lub konieczność wykorzystania do dalszych obliczeń. |
121 Ⴑ 1,3 |
121,0 Ⴑ 1,3 |
Po usunięciu cyfry 3 pozostałaby cyfra 1. |
122,33 Ⴑ 0,26 |
122,3 Ⴑ 0,3 |
Zaokrąglenie wartości błędu powoduje zmniejszenie dokładności zapisu wyniku. |
122,33 Ⴑ 0,002 |
122,330 Ⴑ 0,002 |
Mała wartość błędu powoduje wzrost dokładności zapisu wyniku. |
5. Budowa i działanie przyrządów pomiarowych wykorzystywanych w ćwiczeniu
5.1. Amperomierz analogowy
Przyrząd taki jest najczęściej wykonywany w oparciu o ustrój magnetoelektryczny (ME). Ustrój taki jest typowym ustrojem amperomierzowym, ponieważ kąt wychylenia organu ruchomego zależy od natężenia prądu płynącego przez uzwojenie ustroju a nie od napięcia. Zależność ta jest liniowa. Mierniki ME charakteryzują się dużą czułością i już prądy rzędu ၭA czy mA powodują znaczne wychylenie organu ruchomego, do którego mocowana jest wskazówka miernika.
Amperomierze o zakresie pomiarowym od 1ၭ၁ do 25mA a nawet do 0,5A wykonywane są jako amperomierze bezpośrednie, tzn., że przez ustrój miernika płynie cały prąd mierzony (rys. 5a). Aby móc zwiększyć zakres natężenia prądu, który można by mierzyć za pomocą takiego ustroju bocznikuje go rezystorami o wartościach mniejszych od rezystancji ustroju. Sposób rozszerzania zakresu amperomierza przedstawia rys.5b.
Rys.5. Budowa amperomierza ME: a) amperomierz bezpośredni;
b) amperomierz wielozakresowy z bocznikiem.
Wskazania takiego amperomierza powinny być niezależne od temperatury. Zgodnie z odpowiednimi przepisami w zakresie temperatur (293Ⴑ10)K błąd dodatkowy od temperatury otoczenia nie powinien być większy od błędu podstawowego przyrządu. Rezystory bocznikujące wykonuje się z manganinu cechującego się niewielkimi zmianami rezystancji przy nawet znacznych zmianach temperatury (niski współczynnik temperaturowy rezystancji). Tymczasem uzwojenie ustroju ME wykonywane jest z miedzi, która ma współczynnik temperaturowy rezystancji o dość dużej wartości. Zmiana temperatury spowodowałaby zmianę rozpływu prądu między ustrojem a bocznikiem. Aby temu zapobiec szeregowo do ustroju ME umieszcza się rezystor dodatkowy, wykonany z manganinu, który ma kompensować wpływ zmian temperatury. Można udowodnić [2], że wartość tego rezystora powinna spełniać następującą nierówność
![]()
(17)
Stosując odpowiednio prawa Kirchhoffa można wyprowadzić wzór na wartość rezystancji bocznika Rb w zależności od prądu nominalnego, na jaki chcemy zaprojektować amperomierz. ![]()
(18)
Rezystancja wewnętrzna amperomierza z bocznikiem jest równa
(19)
Rezystancja ta musi być jak najmniejsza, aby spadek prądu wywołany włączeniem amperomierza do obwodu pomiarowego był nie większy niż błąd podstawowy (graniczny) amperomierza.
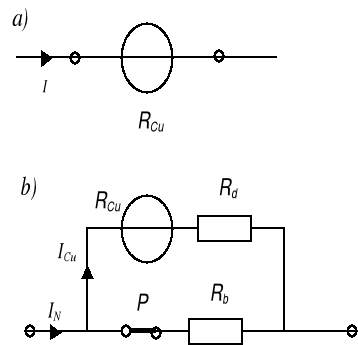
5. 2. Woltomierz analogowy
Woltomierze analogowe są obecnie wykonywane najczęściej w oparciu o ustrój ME. Mierniki takie służą do pomiaru napięcia stałego, a jeśli są wyposażone w odpowiedni przetwornik AC/DC to można je wykorzystywać także do pomiarów napięć zmiennych. Woltomierz ME powstaje, jeśli szeregowo do ustroju włączy się rezystor Rp zwany posobnikiem. Zadaniem takiego rezystora jest zapewnienie dużej rezystancji wewnętrznej woltomierza. Użycie rezystora o dużej wartości ogranicza wartość natężenia prądu płynącego przez ustrój ME. Maleje drastycznie czułość przyrządu, ponieważ ustrój magnetoelektryczny do swojego działania potrzebuje przepływu prądu. Niezależnie od zakresu pomiarowego woltomierza, aby wskazówka takiego miernika mogła wychylać się o ten sam kąt przez ustrój ME musi płynąć ten sam prąd. Zgodnie z prawem Ohma, aby zapewnić ten warunek zmiana zakresu pomiarowego wymusza zmianę wartości rezystancji posobnika. Im zakres woltomierza jest mniejszy, tym rezystancja Rp jest mniejsza. Maleje także rezystancja wewnętrzna. Rezystancja wewnętrzna typowych woltomierzy analogowych waha się w przedziale od kilkudziesięciu omów do kilkudziesięciu kiloomów. Jest to podstawowa wada przyrządów o takiej konstrukcji. Bardzo często dla woltomierzy analogowych podawana jest tzw. jednostkowa rezystancja wewnętrzna określająca wartość rezystancji wewnętrznej przypadającej na 1 wolt zakresu pomiarowego. Przeciwdziałanie polega na tym, że cewkę woltomierza nawija się cieńszym drutem i ma ona więcej zwojów niż amperomierze ME. Zwiększa to czułość przyrządu. Innym sposobem jest zastosowanie na wejściu woltomierza wzmacniacza o dużej rezystancji wejściowej. W ten sposób wykonuje się woltomierze elektroniczne.
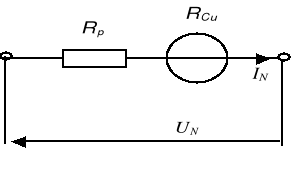
Rys.6. Budowa woltomierza magnetoelektrycznego
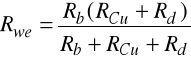
Na rys. 6 przedstawiono schemat ideowy typowego woltomierza analogowego. Wartości rezystorów Rp dobiera się tak, aby spełniona była zależność

(20)
Nie uwzględnia ono rezystancji ustroju RCu , ponieważ przyjęto założenie, że Rp ှှRCu. Jeżeli zrezygnuje się z posobników, to ustrój ME może być także wykorzystany do pomiaru napięcia o wartości nominalnej równej
![]()
(21)
Mała rezystancja wewnętrzna woltomierza może jednak spowodować zakłócenie pracy badanego urządzenia, �onieważ ulegnie zmianie rozpływ prądów w obwodzie pomiarowym. Zjawisko to jest źródłem błędu dodatkowego, którego wartość nie może przekraczać wartości błędu podstawowego woltomierza.
5.3. Omomierz analogowy
Omomierze analogowe wykonuje się w oparciu o ustrój ME. Służą one do pomiaru rezystancji liniowej lub do sprawdzania ciągłości obwodu (wykrywanie stanu zwarcia lub rozwarcia). Idea pracy omomierza polega na tym, że do obwodu pomiarowego włącza się badany element. Obwód zasilany jest napięciem stałym - na ogół z bateryjki. Doprowadzone napięcie wymusza przepływ prądu elektrycznego, którego natężenie jest mierzone za pomocą amperomierza magnetoelektrycznego. Przyrządy tego typu nie są zbyt dokładne a osiąga się nimi dokładności pomiaru rzędu kilku do kilkunastu procent - w zależności od klasy. Wadą tego typu przyrządów jest także to, że w trakcie pomiaru zmianie może ulegać napięcie baterii spowodowane pobieraniem z niej prądu i wzrostem rezystancji wewnętrznej baterii R0. Podziałka miernika jest silnie nieliniowa. W zależności od konfiguracji obwodu pomiarowego woltomierza i sposobu włączania rezystora badanego względem amperomierza (ustroju ME) rozróżnia się omomierze szeregowe i równoległe.
5.3.1. Omomierz szeregowy
Schemat omomierza szeregowego przedstawia rys. 7. Układ składa się ze źródła napięcia stałego o sile elektromotorycznej E i rezystancji R0, rezystora RS i ustroju magnetoelektrycznego. Badany element włączany jest szeregowo do pozostałych elementów.
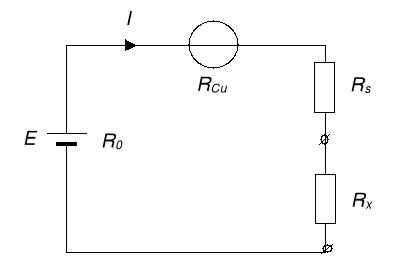
Rys.7. Schemat omomierza szeregowego
Wartość prądu płynącego przez ustrój ME jest równa
(22)
Największy możliwy prąd w układzie jest uzyskiwany wtedy, gdy rezystor Rx stanowi zwarcie.
(23)
Dzieląc obydwa równania stronami otrzymamy
(24)
Jeśli uwzględnimy, że RS >> (R0 + RCu ), to można przyjąć, że R0 + RCu + RS = Rwe , a wówczas
(25)
Ponieważ kąt wychylenia organu ruchomego jest równy ၡ = c I , to
(26)
Równanie (26) opisuje charakterystykę przetwarzania omomierza szeregowego.
Zgodnie z zależnością (26) można wyróżnić trzy istotne punkty charkterystyki przetwarzania:
- RX = 0 - ၡX = ၡmax;
- RX = Rwe - ၡX = ၡmax/2 ;
- RX = Ⴅ - ၡX = 0.
Wynika z tego, że podziałka ma nietypowy przebieg - od prawej do lewej i jest silnie nieliniowa. Przykład podziałki omomierza szeregowego przedstawia poniższy rys. 8.
Rys. 8. Podziałka omomierza szeregowego
W przyrządach pomiarowych produkowanych przed 1985 r. dokładność przyrządu pomiarowego jest wyrażana w procentach długości podziałki (np. 100mm) lub kąta, o który może maksymalnie wychylić się wskazówka miernika od położenia „zero”. Taki sposób definiowania „klasy” był stosowany w miernikach o silnie nieliniowej podziałce, np. w omomierzach. Aby określić błąd graniczny, w takich nietypowych przypadkach należy znać postać równania przetwarzania miernika. Dla omomierza szeregowego błąd graniczny jest wyrażany następująco:
(27)
gdzie: Rwe - wartość rezystancji wewnętrznej omomierza;
Rm - wartość rezystancji mierzonej (wartość, którą wskazał miernik).
Dokładność pomiaru dla omomierza szeregowego jest określona następująco:
(28)
Silna nieliniowość podziałki powoduje, że klasę dokładności tego miernika określa się inaczej niż standardowo. Błąd graniczny oraz dokładność pomiaru rezystancji omomierzem szeregowym opisują zależności (27) i (28). Analizując te wzory dochodzimy do wniosku, że pomiar tym miernikiem, jest tym dokładniejszy, im wskazówka znajduje się bliżej środka podziałki.
Z drugiej jednak strony, jeśli przyrząd jest zasilany z bateryjki, to im rezystancja mierzona jest mniejsza, tym większy prąd pobieramy, a to powoduje zwiększenie rezystancji wewnętrznej baterii, a co za tym idzie maleć będzie SEM baterii. Wynika z tego, że omomierzem szeregowym powinno się mierzyć rezystancje duże - powyżej połowy wychylenia. Jednocześnie przed każdym pomiarem powinno się zwierać zaciski omomierza i korektorem położenia ustawiać położenie wskazówki na „zero”. Przy dużych wartościach Rx mniejsza jest też wrażliwość omomierza na zmiany warunków otoczenia.
5.3.2. Omomierz równoległy
Schemat omomierza równoległego przedstawia rys. 9. Układ pomiarowy składa się z szeregowo połączonych źródła napięcia stałego o rezystancji wewnętrznej R0 i sile elektromotorycznej (SEM) równej E, rezystora dodatkowego RS i ustroju ME. Element badany o rezystancji RX włączany jest równolegle do ustroju miernika.
Rys. 9. Schemat ideowy omomierza równoległego
Taka konfiguracja układu powoduje, że przez ustrój ME płynie prąd o wartości
(29)
Gdy rezystor RX stanowi rozwarcie dla obwodu, wartość tego prądu jest największa i wynosi
(30)
Dzieląc równania (29) i (30) stronami otrzymamy następujący wzór
(31)
gdzie:
(32)
Uwzględniając, że wychylenie organu ruchomego w ustroju ME jest liniową funkcją prądu, to wyrażenie na równanie charakterystyki przetwarzania omomierza równoległego ma postać
(33)
Współczynnik C ma wymiar rezystancji i czasami jest nazywany rezystancją środka skali.
Podobnie jak w omomierzu szeregowym podziałka jest silnie nieliniowa jednak bliższa analiza wyrażenia (36) wskazuje na to, że jest to podziałka prosta, która biegnie od lewej do prawej strony. Przykład takiej podziałki przedstawia rys. 10.
Rys. 10. Podziałka omomierza równoległego
Dla omomierza równoległego błąd graniczny jest wyrażany następująco:
(34)
gdzie: C - stała charakterystyczna dla danej konstrukcji omomierza (w przybliżeniu C = Rwe dla środka podziałki)
Dokładność pomiaru dla omomierza równoległego jest określona następująco:
(35)
Z wyrażeń (28) i (35) wynika, że dokładność pomiaru omomierzem jest silnie zależna od wartości mierzonej, a wartość klasy przyrządu umieszczana na podzielni miernika nie ma bezpośredniego związku z dokładnością pomiaru. Dokładniejsza analiza powyższych wzorów pozwala na wyciągnięcie następujących spostrzeżeń:
- pomiar omomierzem szeregowym jest najdokładniejszy przy Rm = Rwe;
- pomiar omomierzem równoległym jest najdokładniejszy Rm = C, wtedy ၤ%R = 4 kl.d.
- zakres pomiarowy omomierza należy tak dobierać, aby 0,4Rwe Ⴃ Rm Ⴃ 2,5Rwe, wtedy
ၤ%R = 5 kl.d.
W związku z powyższym można stwierdzić, że omomierze analogowe są przyrządami mało dokładnymi, a ich zakres zastosowań jest ograniczony do pomiaru dużych rezystancji w przypadku omomierza szeregowego i małych rezystancji w przypadku omomierzy równoległych.
Zgodnie ze wzorami (34) i (35) dokładność pomiaru jest największa w okolicach środka podziałki. Można udowodnić, że omomierz równoległy jest mniej wrażliwy na zmianę warunków pracy (temperatura, obce pola zakłócające, itd.) przy małych wartościach rezystancji. Zakres pomiarowy powinno dobierać się tak, aby wskazówka miernika znajdowała się tuż poniżej środka skali.
5.4. Multimetr analogowy
Typowy multimetr analogowy zbudowany jest tak, jak na rys. 11. Składa się on z amperomierza ME, zestawu posobników, zestawu rezystorów RS i przełącznika funkcyjnego. Przełącznik funkcyjny pozwala na wybranie funkcji pomiarowej w multimetrze - omomierz (R), amperomierz (I), woltomierz (U). Podstawową funkcją pomiarową jest pomiar prądu przez amperomierz ME. Każda inna funkcja pomiarowa jest realizowana przez dodanie do obwodu amperomierza zestawu rezystorów dodatkowych (RS lub posobników) a w przypadku omomierza dołączenie jeszcze źródła napięcia stałego. Jeśli w układzie zostanie zastosowany dodatkowo przetwornik AC/DC to przyrząd będzie mógł mierzyć także prąd i napięcie zmienne.
Wadą multimetrów jest to, że wymagają od użytkownika większej ostrożności niż przyrządy monofunkcyjne, ponieważ oprócz bezpiecznego doboru zakresu pomiarowego należy uważać, aby nie pomylić funkcji pomiarowej. Wybranie np. funkcji omomierza i włączenie przyrządu do zasilanego obwodu pomiarowego grozi trwałym uszkodzeniem miernika.
Przed wykonaniem pomiarów wybranej wielkości pamiętać należy, że przed włączeniem zasilania w obwodzie pomiarowym:
zakres pomiarowy miernika należy ustawiać na maksymalny możliwy;
korektorem położenia ustawić wskazówkę miernika na „zero”;
przyrząd powinien pracować w warunkach dla których został stworzony (pozycja pracy, temperatura otoczenia, udary, itd.).
Rys.11. Schemat blokowy multimetru analogowego
5.5. Woltomierz cyfrowy
Woltomierze cyfrowe są przeznaczone do pomiaru napięcia stałego lub zmiennego.
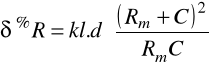
Na rys.12 przedstawiono schemat blokowy woltomierza napięcia stałego. Składa się on z bloków układu wejściowego, przetwornika A/C, dekodera, wskaźnika cyfrowego oraz układu sterującego.
Rys.12. Schemat funkcjonalny woltomierza cyfrowego
Zadaniem układu wejściowego jest wzmocnienie zbyt słabych sygnałów lub stłumienie zbyt silnych. Przetwornik A/C służy do zamiany napięcia o postaci ciągłej na sygnał cyfrowy. Sygnał ten jest przetwarzany do postaci zrozumiałej dla wyświetlacza cyfrowego. Z pojęciem sygnału cyfrowego wiąże się pojęcie kodu, za pomocą którego sygnał analogowy jest zapisany cyfrowo. Na ogół kod sygnału na wyjściu przetwornika A/C jest inny niż kod, który jest zrozumiały przez wyświetlacz cyfrowy. Dekoder jest urządzeniem zmieniającym rodzaj kodu, w którym jest zapisywany sygnał analogowy. Całością pracy urządzenia steruje układ sterujący. Za pomocą tego układu zmienia się zakres pomiarowy woltomierza (przez wybór odpowiedniego tłumienia lub wzmocnienia w układzie wejściowym). Układ steruje także pracą przetwornika A/C zmieniając jego rozdzielczość oraz czas przetwarzania, itd.
Podstawowym blokiem woltomierza jest przetwornik A/C. Obecnie wykorzystuje się przetworniki wielokrotnego całkowania i przetworniki kompensacyjne. Woltomierze cyfrowe osiągają większe dokładności niż woltomierze analogowe. Jednak dokładność tych mierników jest nadal ograniczona przede wszystkim przez część analogową przyrządu.
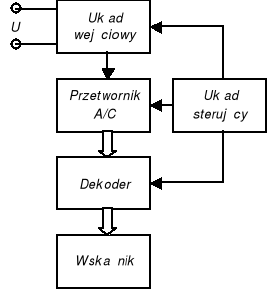
Amperomierz cyfrowy
Amperomierze cyfrowe wykonuje się na ogół w oparciu o woltomierze cyfrowe mierząc napięcie na wzorcowym rezystorze o niewielkiej wartości (np. 1ၗ), przez który płynie mierzony prąd. Rezystor wzorcowy jest oczywiścię integralną częścią przyrządu.
Zgodnie z prawem Ohma napięcie na rezystorze jest wprost proporcjonalne do przepływającego przez niego prądu. Dokładność amperomierzy cyfrowych jest nieco gorsza (rząd lub dwa rzędy) od dokładności woltomierzy cyfrowych, ponieważ zgodnie z prawem przenoszenia błędów dokładność pomiaru prądu jest sumą dokładności woltomierza cyfrowego i dokładności użytego rezystora wzorcowego.
Rys.13. Amperomierz cyfrowy
5.7. Omomierz cyfrowy
Omomierze cyfrowe wykonuje w różny sposób. Najpopularniejsze metody polegają na przetwarzaniu rezystancji w napięcie lub w przedział czasu. Na rys. 14 przedstawiono to pierwsze rozwiązanie.
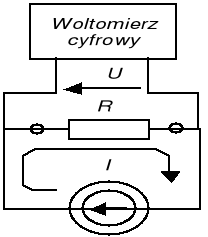
Rys.14. Omomierz cyfrowy z przetwarzaniem R/U
Omomierz cyfrowy składa się z woltomierza cyfrowego oraz wzorcowego źródła prądowego o stałej i znanej wydajności. Prąd z tego źródła płynie przez rezystor o rezystancji mierzonej. Podobnie jak w przypadku amperomierza cyfrowego wykorzystywane jest prawo Ohma. Omomierze cyfrowe są znacznie dokładniejsze od analogowych i osiągają dokładność rzędu części procenta i lepiej. Wadą tych mierników jest to, że rezystancja mierzona musi być znacznie mniejsza od rezystancji wewnętrznej woltomierza. W innym wypadku zależność wskazań przyrządu od rezystancji mierzonej przestaje być liniowa, ponieważ rzeczywisty woltomierz ma skończoną rezystancję, która jest równolegle połączona z rezystancją badanego rezystora.
5.8. Multimetr cyfrowy
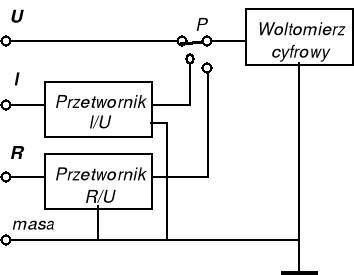
Rys.15. Schemat blokowy multimetru cyfrowego
Multimetry cyfrowe mierzą na ogół znacznie więcej wielkości niż multimetry analogowe. Ich budowa oparta jest o woltomierz cyfrowy. Ich idea polega na tym, że każdą z mierzonych wielkości przetwarza się w napięcie stałe, a to napięcie mierzy się woltomierzem cyfrowym.
5.9. Pomiar rezystancji z wykorzystaniem amperomierza i woltomierza
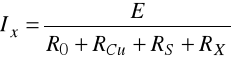
Przy braku omomierza, pomiaru rezystancji można dokonać metodą pośrednią, przez pomiar napięcia i prądu płynącego przez badany rezystor. Wielkości podstawić można do wzoru
![]()
(36)
Rozróżnia się dwa układy pomiarowe - układ z poprawnie mierzonym prądem oraz układ z poprawnie mierzonym napięciem. Pod warunkiem, że wyeliminuje się tzw. błąd metody, dla obydwu układów dokładność pomiaru wynosi
![]()
(37)
Gdzie: ၤUX - dokładność pomiaru napięcia woltomierzem;
ၤIX - dokładność pomiaru prądu.
Jeśli błędu metody nie wyeliminuje się, to można udowodnić, że układ z poprawnie mierzonym prądem powinno stosować się do pomiaru dużych rezystancji, tzn. takich, które spełniają nierówność:
![]()
gdzie: RV - rezystancja wewnętrzna woltomierza;
RA - rezystancja wewnętrzna amperomierza.
Układ z poprawnie mierzonym napięciem jest dokładniejszy, jeśli:
![]()
Przyjmuje się jednak, że wykonujący pomiary dobrał właściwie zakresy pomiarowe mierników. Jeśli w pomiarach wykorzystywane są przyrządy elektroniczne, to na ogół spełniony jest warunek
RV >> RX
i należy stosować układ z poprawnie mierzonym napięciem.
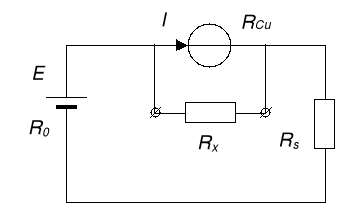
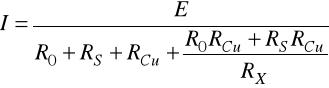
5.9.1. Układ z poprawnie mierzonym prądem
Schemat układu �pomiarowego przedstawia rys. 16. W układzie tym, przez amperomierz płynie ten sam prąd, co przez badany rezystor (stąd nazwa układu). �Natomiast woltomierz wskazuje napięcie nie na rezystorze badanym, lecz na szeregowym połączeniu rezystora badanego i amperomierza, który charakteryzuje się rezystancją wewnętrzną RA. W związku z tym, rzeczywista wartość rezystancji wynosi
![]()
(38)
gdzie UA = IXთ RA. Jeśli tak, to
![]()
(39)
Zakłada się, że RA jest znane z nieskończoną dokładnością, co nie musi być prawdą
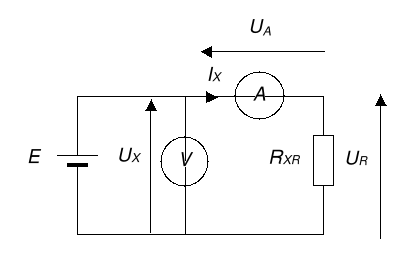
Rys.16. Schemat układu do pomiaru rezystancji z poprawnie mierzonym prądem
5.9.2. Układ z poprawnie mierzonym napięciem
Na rys. 17 przedstawiono schemat układu pomiarowego.
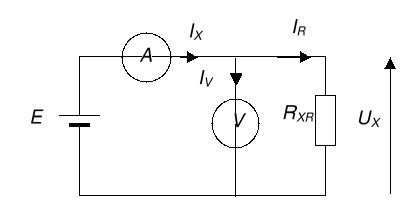
Rys. 17. Schemat układu do pomiaru rezystancji z poprawnie mierzonym napięciem
W układzie tym poprawnie mierzoną wielkością jest napięcie. Ze względu na to, że rezystancja wewnętrzna woltomierza RV jest skończona, amperomierz wskazuje sumę prądów IV oraz IR. W związku z tym można zapisać, że wartość rzeczywista rezystancji mierzonej wynosi
![]()
(40)
gdzie IV = UX / RV . Jeśli tak, to
(41)
Przyjmuje się założenie, że RV jest znane z nieskończoną dokładnością.
5.10. Rezystor dekadowy
Rezystory dekadowe są regulowanymi wzorcami rezystancji - jako wzorce są przyrządami pomiarowymi. Rezystory takie składają się z dekad. Każda z dekad składa się z rezystorów stałych (nieregulowanych) o wartościach tego samego rzędu (np. jedności, dziesiątki, setki, tysiące omów). Dany rezystor w dekadzie wybierany jest za pomocą przełącznika. Wartość danej dekady może się zmieniać w zakresie (0Ⴘ10)თေူn ၗ, gdzie n - rząd dekady. Wszystkie dekady rezystora dekadowego są połączone szeregowo. Sposób połączeń dekad w rezystorze dekadowym przedstawiono na rys.17.
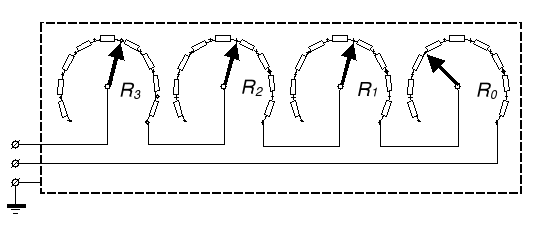
Rys.18. Schemat połączeń rezystora dekadowego z ekranem
Do podstawowych parametrów rezystorów dekadowych należ prąd nominalny, liczba dekad, zakres nominalny, klasa dokładności. Ze względu na specyfikę wykonania takie parametry jak klasa czy prąd znamionowy określa się dla każdej z dekad osobno. Klasę dekady określa się względem jej wartości nominalnej. Jeśli więc istnieje potrzeba wyznaczenia błędu granicznego ustawienia żądanej wartości rezystancji, należy wyznaczyć błędy graniczne dla każdej z dekad, na której wybrano wartość inną niż zerowa i zsumować je ze sobą (rezystancja połączenia szeregowego dekad jest równa sumie wartości rezystancji rezystorów wybranych w poszczególnych dekadach) - zgodnie z prawem przenoszenia błędów.
6. Literatura
[1] A. Chwaleba, M. Koniński, A. Siedlecki „Metrologia elektryczna”, WNT, Warszawa, 1994, sygn. 53200.
[2] Taylor J.R. „Wstęp do analizy błędu pomiarowego”, Wydawnictwo Naukowe PWN, Warszawa, 1995, sygn.52951.
[3] Kędzielski A., Senatorski M. „Miernictwo elektryczne dla elektroników. Cz.1”, WAT, Warszawa, 1981, sygn. S-43646.
7. Przykładowe zagadnienia kontrolne
Odczyt i błędy odczytu przyrządów cyfrowych i wychyłowych.
Sposoby wyrażania dokładności przyrządów analogowych i cyfrowych.
Dokładność pomiaru przy jednokrotnych pomiarach bezpośrednich.
Prawo przenoszenia błędów.
Zasady zapisu wartości wielkości mierzonej i jej błędu.
Zasada działania i budowa analogowych i cyfrowych przyrządów pomiarowych wykorzystywanych w ćwiczeniu.
Pomiar rezystancji metodą pośrednią.
Omówić podstawowe właściwości przyrządów pomiarowych, tj.: zakres pomiarowy, zakres wskazań, dokładność, rezystancja wewnętrzna, rozdzielczość (zdolność rozdzielcza), nominalne warunki pracy [3].
17
Wyszukiwarka
Podobne podstrony:
etzi-zagadnienia do zaliczenia-2016, ELEKTRONIKA I TELEKOMUNIKACJA PRZ - systemy pomiarowe i diagnos
Głow2, Elektronika i telekomunikacja-studia, rok III, sem V, teo
Pytania z teledetekcji-ca, Elektronika i telekomunikacja WAT, Semestr V, PTD
ZagadnieniaTS5, STUDIA, ELEKTRONIKA & TELEKOMUNIKACJA, Technologie sieciowe
KACHEL PSI, Elektronika i telekomunikacja-studia, rok III, sem V, teo
1111111111111111Ula, elektronika i telekomunikacja
generacje komp dla ucznia, Elektronika i Telekomunikacja, informatyka
typy danych, Elektronika i Telekomunikacja, informatyka
efektywnosc zespolu zadaniowego, elektronika i telekomunikacja
Funkcje mat i operatory, Elektronika i Telekomunikacja, informatyka
motywacja i techniki oddzialywania, elektronika i telekomunikacja
sys1, Elektronika i telekomunikacja-studia, rok II, semIV, mid
opracowane kolos, WAT- Elektronika i Telekomunikacja, Semestr I, Pnor, Pnor
NA KOLOSA-sciaga, elektronika i telekomunikacja
więcej podobnych podstron