01
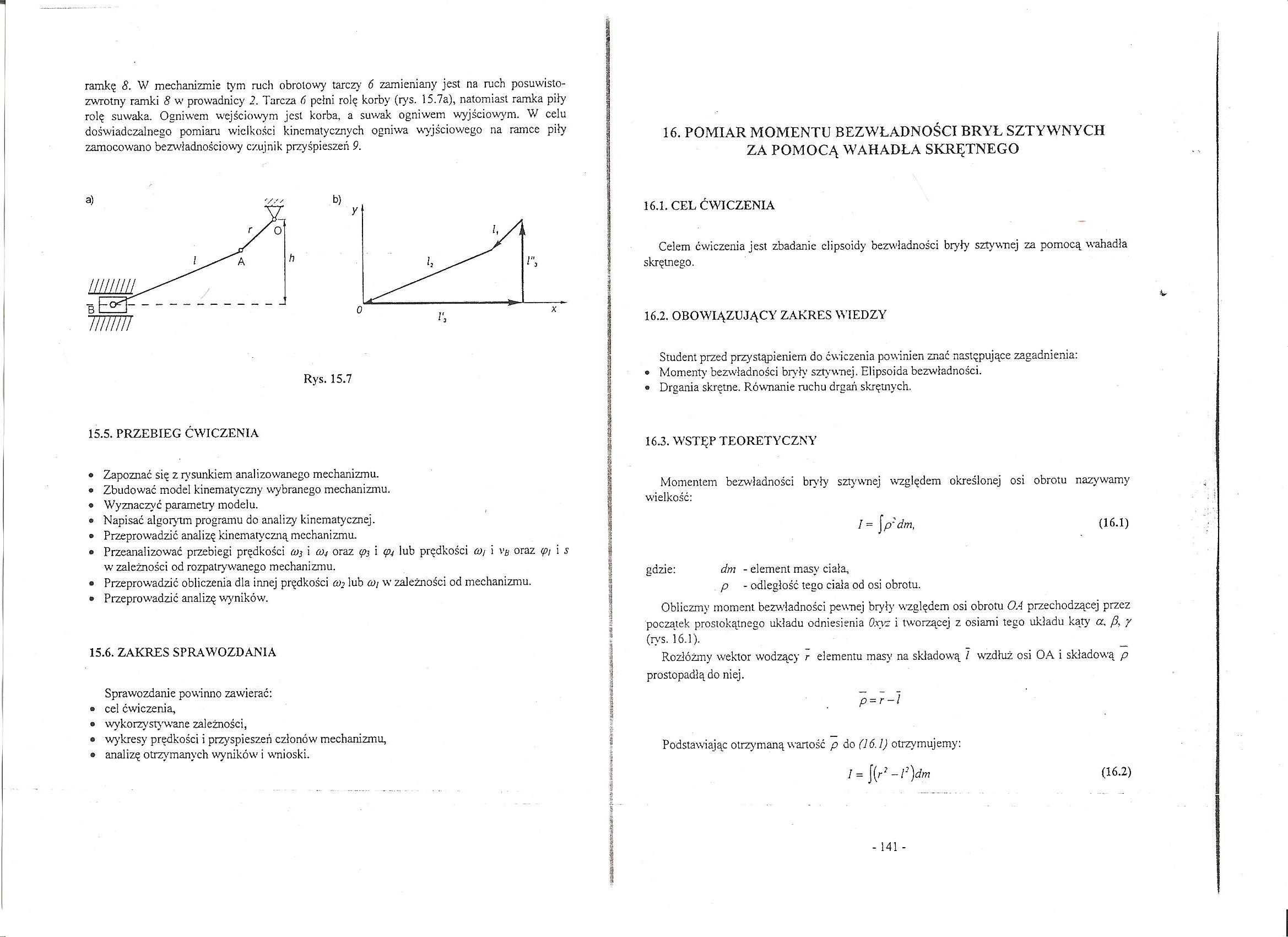
ramkę 8. W mechanizmie tym ruch obrotowy tarczy 6 zamieniany jest na ruch posuwisto-zwrotny ramki 8 w prowadnicy 2. Tarcza 6 pełni rolę korby (rys. 15.7a), natomiast ramka pity rolę suwaka. Ogniwem wejściowym jest korba, a suwak ogniwem wyjściowym. W celu doświadczalnego pomiaru wielkości kinematycznych ogniwa wyjściowego na ramce pity zamocowano bezwładnościowy czujnik przyśpieszeń 9.
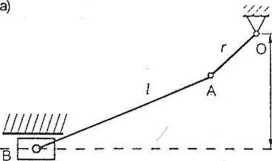
Rys. 15.7
15.5. PRZEBIEG ĆWICZENIA ® Zapoznać się z rysunkiem analizowanego mechanizmu.
• Zbudować model kinematyczny wybranego mechanizmu.
® Wyznaczyć parametry modelu.
® Napisać algorytm programu do analizy kinematycznej.
® Przeprowadzić analizę kinematyczną mechanizmu.
• Przeanalizować przebiegi prędkości ru? i a>4 oraz cpj i lub prędkości a>/ i \'u oraz <pi i 5 w zależności od rozpatrywanego mechanizmu.
« Przeprowadzić obliczenia dla innej prędkości 002 lub co\ w zależności od mechanizmu.
• Przeprowadzić analizę wyników'.
15.6. ZAKRES SPRAWOZDANIA
Sprawozdanie powinno zawierać:
» cel ćwiczenia,
• wykorzystywane zależności,
® wykresy prędkości i przyspieszeń członów mechanizmu,
• analizę otrzymanych wyników' i wnioski.
16. POMIAR MOMENTU BEZWŁADNOŚCI BRYŁ SZTYWNYCH ZA POMOCĄ WAHADŁA SKRĘTNEGO
16.1. CEL ĆWICZENIA
Celem ćwiczenia jest zbadanie elipsoidy bezwładności bryły sztywnej za pomocą wahadła skrętnego.
16.2. OBOWIĄZUJĄCY ZAKRES WIEDZY
Student przed przystąpieniem do ćwiczenia powinien znać następujące zagadnienia: ® Momenty bezwładności bryły sztywnej. Elipsoida bezwładności.
• Drgania skrętne. Równanie ruchu drgań skrętnych.
16.3. WSTĘP TEORETYCZNY
Momentem bezwładności bryły sztywnej względem określonej osi obrotu nazywamy wielkość:

(16.1)
gdzie: dm - element masy ciała,
p - odległość tego ciała od osi obrotu.
Obliczmy moment bezwładności pewnej bryły względem osi obrotu OA przechodzącej przez początek prostokątnego układu odniesienia Qxyz i tworzącej z osiami tego układu kąty a, /?, y (rys. 16.1).
Rozłóżmy wektor wodzący r elementu masy na składową 7 wzdłuż osi OA i składową p prostopadłą do niej.
Podstawiając otrzymaną wartość p do (16.1) otrzymujemy:
(16.2)
- 141 -
Wyszukiwarka
Podobne podstrony:
DSC00040 2 Łnwwtfącf! w nich procesy kinetyczną. która zamieniana jest na ruch obrotowy innych białe
Praworządność !!! Termin ten często zamieniany jest na "państwo prawa". Wielokrotnie
Praworządność!!! Termin ten często zamieniany jest na "państwo prawa". Wielokrotnie
IMGQ09 frrWf ntzwisko nr Maksu 30-01-2007 Obrotowa tarcza 1 poprzez sworzeń wymusza ruch posuwi
M4 pneumatycznych. isijaK jest wprawiany w rucn posuwisto-zwrotny, a energia zderzenia bijaka z narz
MechanikaD9 Jeżeli ruch punktu przyłożenia siły jest ruchem obrotowym wokół stałego punktu 0,
Wyniki w tym czasie zapisane są w zbiorze tekstowym na twardym dysku komputera. Ruch zaworu jes
Wprowadzenie DYNAMIKA jest działem mechaniki opisującym ruch układu materialnego pod wpływem si
Mechanika II Ruch plaski. Ruch plaski jako złożenie ruchu postępowego i obrotowego. Pojęcie chwilowe
Rozdział 2Kinematyka Definicja 3 Kinematyka jest to dział mechaniki opisujący ruch punktu lut) bryły
więcej podobnych podstron