152

152
d) mocy biernej układu w funkcji współczynnika wypełnienia
e) współczynnika mocy układu w funkcji współczynnika wypełnienia X- f(ó ),
f) sprawności układu w funkcji współczynnika wypełnienia ^" fCóp)^
g) prędkości obrotowej silnika w funkcji współczynnika wypełnienia
ns - fcv*
5« obserwacja charakterystycznych wielkości układu - napięcia i prądu odbiornika oraz napięcia i prądu zaworów,
Sposób realizacji ćwiczenia 3
ad 1 * Dokonać wyboru rodzaju sterowania oraz schematu jednego z układów
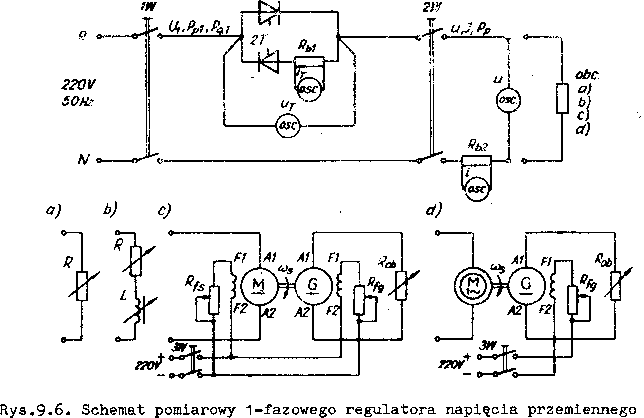
regulatora - rysunek 9,1 (w przypadku sterowania odwrotnie-synetry-cznego ora^ pulsowego tylko układ odwrotnie-równoległy), wybrać rodzaj obciążenia, pobrać mierniki oraz sprzęt dodatkowy i połączyć u-kład| schemat pomiarowy układu przedstawiono na rysunku 9.6.
tr
Załączenia układu do sieci zasilającej należy dokonać przy położeniu potencjometru sterującego odpowiadającym minimalnemu napięciu
wyjściowemu. Następnie zmieniając kąt a , lub współczynnik 6 , ob-
^ z p
serwować wskazania mierników,
ad 2, Dla każdego rodzaju obciążenia, przy zmianach kąta az lub współczynnika 6p od wartości minimalnej do maksymalnej, mierzyć;
a) przy sterowaniu symetrycznym: U^, U, I» PpL* PqL> Pp, a dla obciążenia silnikiem dodatkowo ng,
b) przy sterowaniu odwrotnie-symetrycznym; U^, 1^, PPL> a dla obciążenia silnikiem dodatkowo ns,
Wyszukiwarka
Podobne podstrony:
Kompensacja mocy biernej Schemat funkcjonalny układu automatycznej regulacji współczynnika mocy
2tom318 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 638 W energetyce współczynnik mocy w układach trój
Cw 3 z gwiazdką str0 i1 ĆWICZENIE 3 *POPRAWA WSPÓŁCZYNNIKA MOCY - KOMPENSACJA MOCY BIERNEJ3.1.
4.1 Zmiana wartości współczynnika wypełnienia Zarówno dla układu obniżającego jak i podwyższającego
podaj i objaśnij wzór na współczynnik pobieranej mocy biernej indukcyjnej cosę?: U +1 P - moc czynna
MaszynyElektryczne Instr cw3zgwiazdka str1 *ĆWICZENIE 3POPRAWA WSPÓŁCZYNNIKA MOCY - KOMPENSACJA MOCY
211 tif 6.3. KONDENSATORY I KOMPENSACJA MOCY BIERNEJ nak jest to rozwiązanie drogie, ale łączy się f
152 3 mocy silnika oraz strumienia doprowadzanego tlenu z zadaniem utrzymania współczynnika nadmiaru
Doc # 01 2015,! 36 p1 Zadanie z układu Obliczyć pojemność C dla całkowitej kompensacji mocy biern
Rys.3.3. Schemat układu pomiarowego do badania kompensacji mocy biernej odbiornika o niskim cos (p A
2tom302 8. ENERGOELEKTRONIKA 606 8. ENERGOELEKTRONIKA 606 Rys. 8.32. Wykresy zależności mocy biernej
więcej podobnych podstron