33
62
3.5. Graficzna korekta pozycji zliczonej
Decyzja o skorygowaniu nakresu drogi pozycją obserwowaną jest najtrudniejsza, gdy rozmiary koła błędu są duże, a ściślej -gdy duży jest stosunek promienia błędu pozycji obserwowanej M0
do promienia błędu zliczenia M^, orientacyjnie
^2. >3. Gdy
M,
stosunek ten jest korzystniejszy, wówczas należy określić pozycję średnią. Można przyjąć, że dopuszczalnym przedziałem takiej korekcji jest:


*3
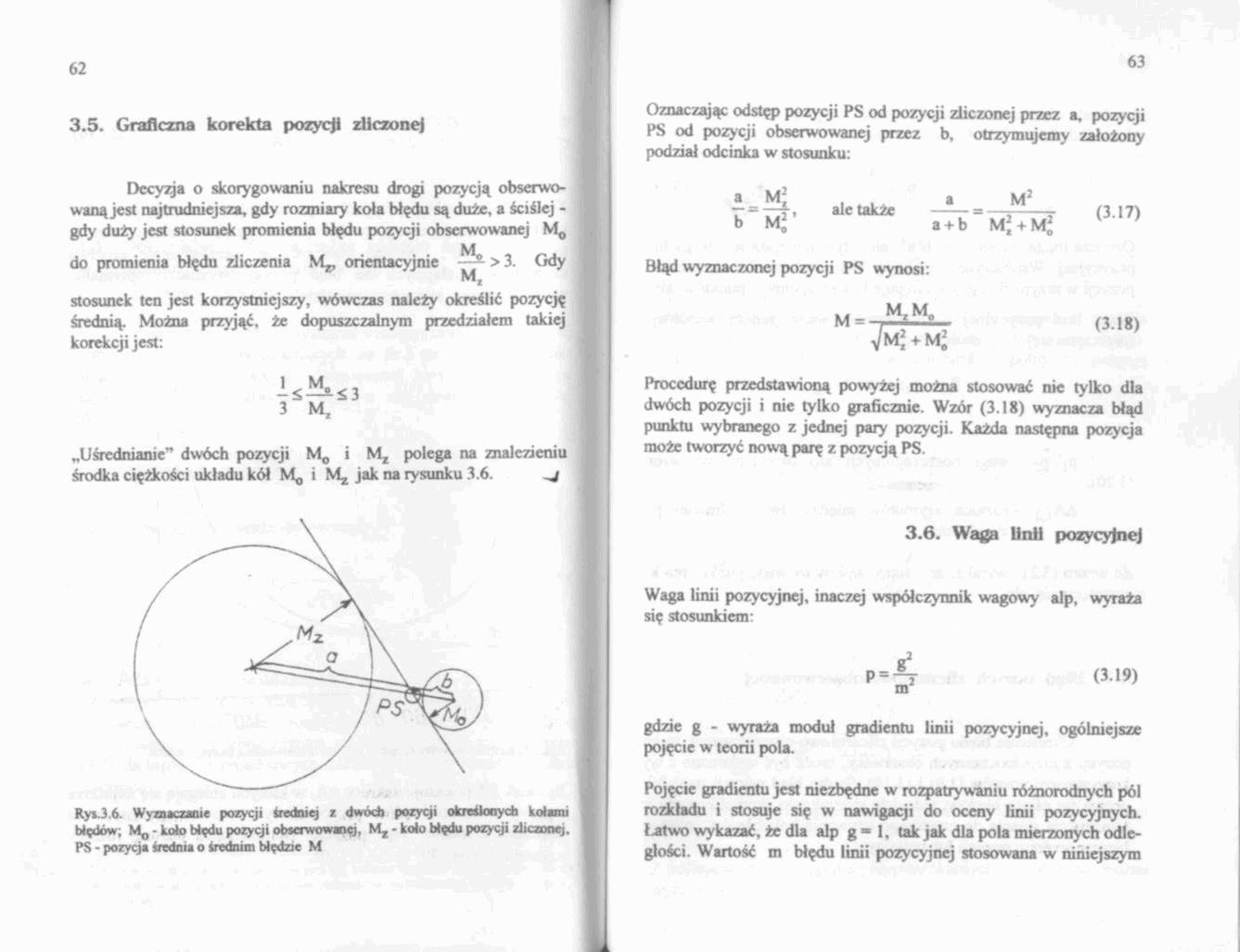
„Uśrednianie*' dwóch pozycji Me i Mz polega na znalezieniu środka ciężkości układu kół M0 i M^, jak na rysunku 3.6.
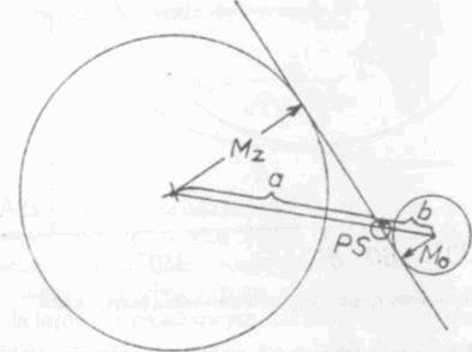
Ryt.3.6. Wymacanie pozycji średniej z dwóch pozycji określonych kotami błędów; M^, - koto błędu pozycji obserwowanej, M* - kolo błędu pozycji zlicmoej. PS - pozycja średnia o średnim błędzie M
Oznaczając odstęp pozycji PS od pozycji zliczonej przez a. pozycji PS od pozycji obserwowanej przez b, otrzymujemy założony podział odcinka w stosunku:
a
b" M’’
ale także
a
a + b " Mj + Mj
(3.17)
Błąd wyznaczonej pozycji PS wynosi:
M =
(3.18)
Procedurę przedstawioną powyżej można stosować nie tylko dla dwóch pozycji i nic tylko graficznie. Wzór (3.18) wyznacza błąd punktu wy branego z jednej pary pozycji. Każda następna pozycja może tworzyć nową parę z pozycją PS.
3.6. Waga ttnU pozycyjnej
Waga linii pozycyjnej, inaczej współczynnik wagowy alp, wyraża się stosunkiem*

(3.19)
gdzie g - wyraża moduł gradientu linii pozycyjnej, ogólniejsze pojęcie w teorii pola.
Pojęcie gradientu jest niezbędne w rozpatrywaniu różnorodnych pól rozkładu i stosuje się w nawigacji do oceny linii pozycyjnych, ł^two wykazać, że dla alp g * 1, tak jak dla pola mierzonych odległości. Wartość m błędu linii pozycyjnej stosowana w niniejszym
Wyszukiwarka
Podobne podstrony:
278 (13) analiza pozycji obserwowanej jest znacznie łatwiejsza, jeśli się zna pozycję zliczoną. Nale
CCF20121002�00 NAWIGACJA Pytania egzaminacyjnePozycja zliczona i pozycja obserw
DSC00165 2 62 Tony Bużan Mapy myśliPodejmowanie decyzji z pomocą map myśli Mapy myśli idealnie nadaj
235 (18) *2. Pozycja zliczona 235 Nowy kierunek drogi (KD, KR) wykreśla się z każdej pozycji obserwo
257 (13) 13 Terestryczna pozycja obserwowana 257 Rys. 13.26. Sposób graficzny oceny Kierunku drogi n
P1110722 Rys. 11 symbol graficzny danej pozycji suwaka. Strzałka pokazuje przepływ cieczy przez rozd
104 pozycji zliczonej. Pozycje obserwowane, nanoszone obok linii zliczenia drogi statku, służą do ko
PloterDrukarka wielkoformatowa Urządzenia idealne do aplikacji graficznych i korekty kolorów, w nowy
File1024 (2) # Opuszkami palców nakreśl drogi. Połącz rysunki w pary.
File1024 (3) © Opuszkami palców nakreśl drogi. © Połącz rysunki w pary. © Uwaga: Możemy się bawić w
File1045 (2) ©Opuszkiem palca nakreśl drogi. ©Prześledź brakujące linie i narysuj je.
więcej podobnych podstron