54
104
pozycji zliczonej. Pozycje obserwowane, nanoszone obok linii zliczenia drogi statku, służą do kontroli zliczenia, wnioskowania o wy stępowaniu znosu i dryfu.
104
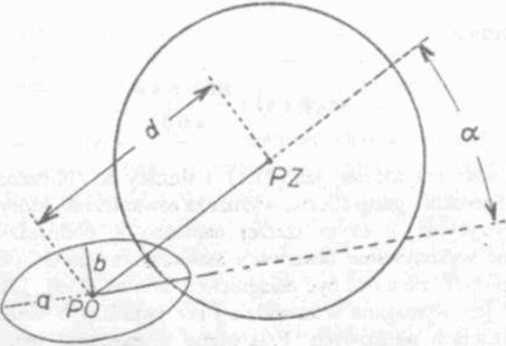
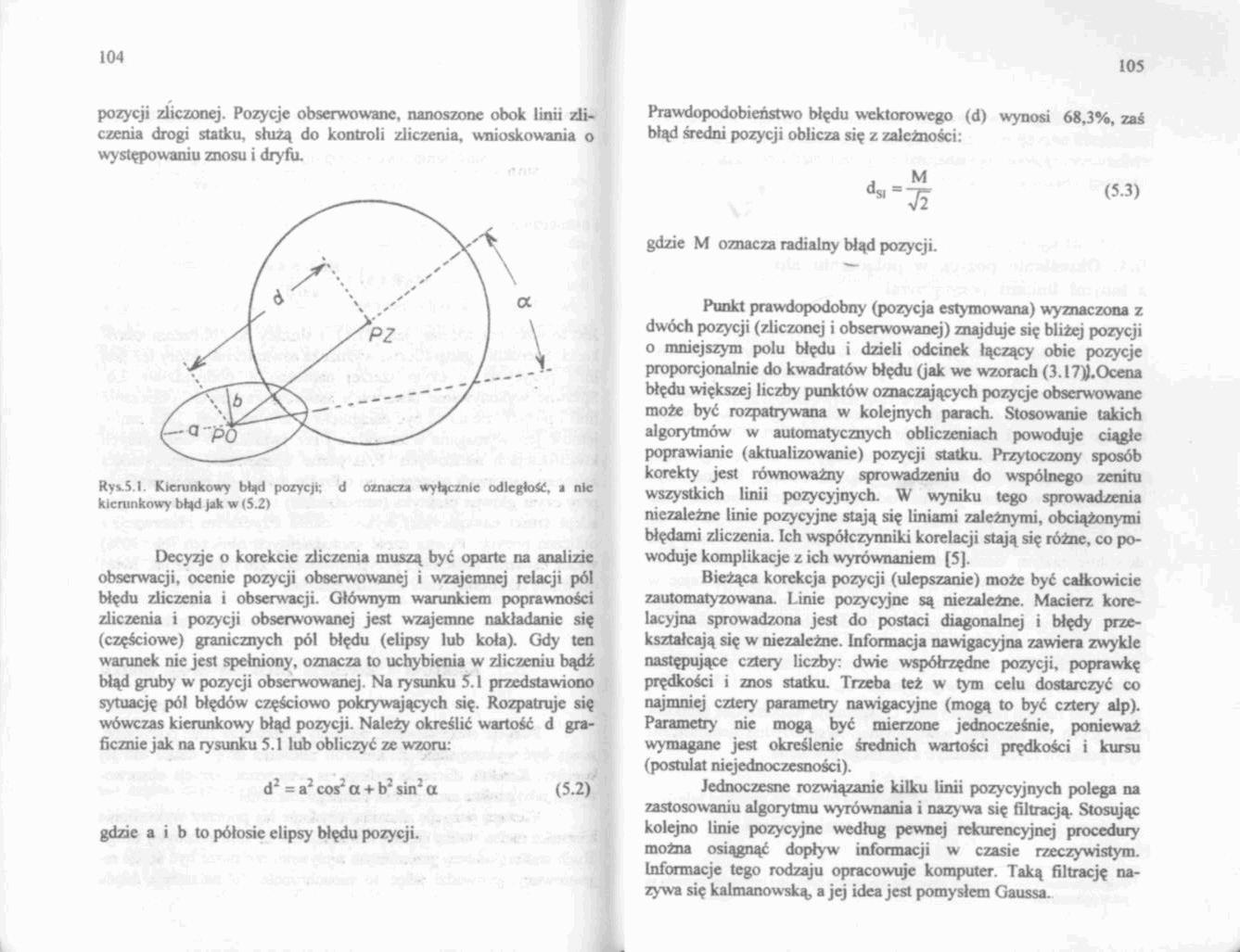
Ryv$ I Kierunkowy Mąd pozycji; d oznacza wyłącznie odległość. a nic kierunkowy błąd jak w (5.2)
Decyzje o korekcie zliczenia muszą być oparte na analizie obserwacji, ocenie pozycji obserwowanej i wzajemnej relacji pól błędu zliczenia i obserwacji. Głównym warunkiem poprawności zliczenia i pozycji obserwowanej jest wzajemne nakładanie się (częściowe) granicznych pól błędu (elipsy lub koła). Gdy ten warunek nie jest spełniony, oznacza to uchybienia w zliczeniu bądź błąd gruby w pozycji obserwowanej. Na rysunku 5.1 przedstawiono sytuację pól błędów częściowo pokrywających się. Rozpatruje się wówczas kierunkowy błąd pozycji. Należy określić wartość d graficznie jak na rysunku 5.1 lub obliczyć ze wzoru:
(5.2)
d2 = a2 cos2 a ♦ b2 sin2 a
gdzie a i b to półosie elipsy błędu pozycji.
Prawdopodobieństwo błędu wektorowego (d) wynosi 68,3%, zaś błąd średni pozycji oblicza się z zależności:
dsi * ^ (5.3)
gdzie M oznacza radialny błąd pozycji.
Punkt prawdopodobny (pozycja estymowana) wyznaczona z dwóch pozycji (zliczonej i obserwowanej) znajduje się bliżej pozycji o mniejszym polu błędu i dzieli odcinek łączący obie pozycje proporcjonalnie do kwadratów błędu (jak we wzorach (3.l7)).Ocena błędu większej liczby punktów oznaczających pozycje obserwowane może być rozpatrywana w kolejnych parach. Stosowanie takich algorytmów w automatycznych obliczeniach powoduje ciągłe poprawianie (aktualizowanie) pozycji sutku. Przytoczony sposób korekty jest równoważny sprowadzeniu do wspólnego zenitu wszystkich linii pozycyjnych. W wyniku tego sprowadzenia niezależne linie pozycyjne stają się liniami zależnymi, obciążonymi błędami zliczenia. Ich współczynniki korelacji sują się różne, co powoduje komplikacje z ich wyrównaniem [5).
Bieżąca korekcja pozycji (ulepszanie) może być całkowicie zautomatyzowana. Linie pozycyjne są niezależne. Macierz korelacyjna sprowadzona jest do postaci diagonalnej i błędy prze-kształcają się w niezależne. Informacja nawigacyjna zawiera zwykle następujące cztery liczby: dwie współrzędne pozycji, poprawkę prędkości i znos sutku. Trzeba też w tym celu dostarczyć co najmniej cztery parametry nawigacyjne (mogą to być cztery alp). Parametry nie mogą być mierzone jednocześnie, ponieważ wymagane jest określenie średnich wartości prędkości i kursu (postulat niejednoczesności).
Jednoczesne rozwiązanie kilku linii pozycyjnych polega na zastosowaniu algorytmu wyrównania i nazywa się filtracją. Stosując kolejno linie pozycyjne według pewnej rekurencyjnej procedury można osiągnąć dopływ informacji w czasie rzeczywistym. Informacje tego rodzaju opracowuje komputer. Taką filtrację nazywa się kalmanowską, a jej idea jest pomysłem Gaussa.
Wyszukiwarka
Podobne podstrony:
236 (19) 3HK13. TERESTRYCZNA POZYCJA OBSERWOWANA13.1. Podstawy teoretyczne linii pozycyjnych Podstaw
62 3.5. Graficzna korekta pozycji zliczonej Decyzja o skorygowaniu nakresu drogi pozycją obserwowaną
278 (13) analiza pozycji obserwowanej jest znacznie łatwiejsza, jeśli się zna pozycję zliczoną. Nale
CCF20121002�00 NAWIGACJA Pytania egzaminacyjnePozycja zliczona i pozycja obserw
235 (18) *2. Pozycja zliczona 235 Nowy kierunek drogi (KD, KR) wykreśla się z każdej pozycji obserwo
255 (13) 255 13 Terestryczna pozycja obserwowana Określanie pozycji z kilku linii niejednoczesnych J
IMAG0341 (10) Pozycje obserwowane powinny być określone w regularnych odstępach czasu, a częstość ic
P1013863 Zasada wyznaczania pozycji z obserwacji sztucznych satelitów Ziemi Dlaczego w geodezji używ
P1013865 Zasada wyznaczania pozycji z obserwacji sztucznych satelitów Ziemi c.d. ■ Układ inercjalny
290 (12) W układzie równań (15.10) szukanymi wielkościami są szerokość i długość pozycji obserwowane
302 (15) Równoległobok najbardziej obrazowo ilustruje rozkład pozycji obserwowanej. Jeżeli się założ
308 (13) 15.4.3. Dokładność pozycji obserwowanej przy nie znanej wartości działającego znosu, l
b) Zenit - punkt na sferze niebieskiej znajdujący się dokładnie nad pozycją obserwatora. c)
Najwięcej książek wypożyczyła klasa lllb (104 pozycje), II miejsce to klasa llb (62 książki). W bibl
więcej podobnych podstron