255 (13)

255
13 Terestryczna pozycja obserwowana
Określanie pozycji z kilku linii niejednoczesnych
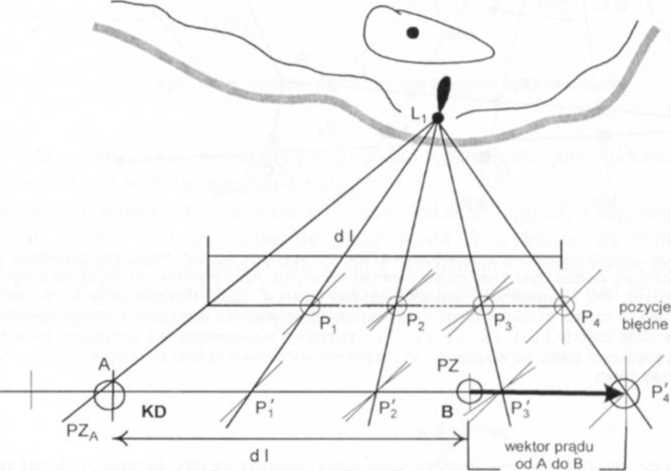
Jeżeli nie ma możliwości określenia odległości ze względu na widoczny tylko jeden obiekt do obserwacji, pozostaje wypróbowany sposób prowadzenia na niego namiarów w różnych momentach, w czasie ruchu statku (rys. 13.24).
pozyqe
rzeczywiste
Rys. 13.24. Pozycja określana z kilku linii niejednoczesnych. w rejonie działania prądu zgodnego z kierunkiem ruchu statku
Pozycje określane w ten sposób są bardzo „czułe” na błędy oceny przebytej drogi oraz zależą w dużym stopniu od różnicy kątów przecięcia się linii przesuniętych, jak Pi i A. W czasie działania prądu o nieznanych parametrach, tak określane pozycje mogą być błędne i stanowić zagrożenie bezpieczeństwa. Na rysunku I3.24 przedstawiony jest przykład, jak błędne mogą być pozycje P\...Pą, gdy w procesie przesunięcia linii pozycyjnych z namiaru na obiekt L\ nie uwzględniono stałego prądu działającego wzdłuż kierunku drogi. W rzeczywistości prawdziwe pozycje, po uwzględnieniu prądu zgodnego z kierunkiem drogi statku, oznaczono jako /*', Ą,
pi pi
Wyszukiwarka
Podobne podstrony:
245 (14) 13. Terestryczna pozycja obserwowana 245 Pozycja obserwowana z dwóch odległości Wyznaczanie
247 (17) 13 Terestryczna pozycja obserwowana 247 pomiaru wynosi 45°, to kąt latarni L w momencie II
249 (14) 13 Terestryczna pozycja obserwowana 249 lub ostatnie, na obiekty w okolicy trawersu statku,
251 (12) 13. Terestryczna pozyqa obserwowana 251 Tak obliczone różnice, po uśrednieniu, pozwalają ok
253 (12) 253 13. Terestryczna pozycja obserwowana13.10. Pozycja obserwowana z dwóch kątów poziomych
257 (13) 13 Terestryczna pozycja obserwowana 257 Rys. 13.26. Sposób graficzny oceny Kierunku drogi n
239 (17) 13 Terestryczna pozyqa obserwowana 239 Namiar wykreślany jest na zidentyfikowany znak /. na
241 (16) 13. Terestryczna pozyqa obserwowana 24113.3. Izolinia jako odcinek okręgu koła Linią pozycy
243 (16) 13 Terestryczna pozyqa obserwowana 243 Błąd odległości zmierzonej radarem wynosi od 0,01 do
PKBWM Raport końcowy - WIM 14/13 3. Od pozycji 19 do 21 statek nie wytraca nabytej
img072 (13) Ed Ludbrook Informacja dotycząca systemu jest jasna i szczegółowa, więc nie ma tam wątpl
13 w akcie stanowiącym podstawą wystawienia tytułu wykonawczego, jak i w tytule wykonawczym, nie ma
IMG 28 Bezpośrednio po operacji stasuje się, jeżeli nie ma przeciwwskazań, pozycję połsiedzącą lub s
HWScan00130 obowiązuje dla określonych parametrów h, r. Ponieważ zmienny współczynnik korekcyjny nie
więcej podobnych podstron